1. Introduction
Noise radar, also known as random noise radar (RNR), was first considered a method for removing both range-Doppler ambiguities in the early 1950s [
1]. However, owing to the complexity and a large amount of computation, it was not easy to implement it in actual hardware. Recently, it has been actively studied again and implemented into systems as the hardware, including radio frequency (RF) technology and analog to digital converter (ADC)/digital to analog converter (DAC), has progressed [
2,
3].
Noise radar detects a target using a low-power continuous signal that appears to be random noise. The key advantage of a noise signal is its low probability of exploitation (LPE) property against electronic support measures (ESM) and electronic intelligence (ELINT). ESM and ELINT are technologies used for detecting, analyzing, and cataloging radar signals. Because of its low power and randomness, noise radar has the advantage of a low probability of detection (LPD). It has a more significant advantage in that the random signal is difficult to catalog and duplicate for deceptive, false target signals [
4]. In addition, the ideal noise waveform has no mutual interference; therefore, it can be used in radars operating simultaneously in the same frequency band. For example, as the use of automotive radars is gradually increasing, waveforms of low mutual interference are required, and the noise signal can be a candidate. Furthermore, the low-interference property is critical for a multi-input multi-output (MIMO) radar, which transmits multiple waveforms simultaneously [
1]. The final advantage is that there is no ambiguity in range-Doppler measurements with a thumbtack ambiguity function, which is an original characteristic of noise radar. In addition, it has high resolution because the signal is homogeneously spread in frequency and infinitely lasting over time. In practice, the resolution is limited by both the bandwidth and integration time.
However, noise radar has several drawbacks. First, because the transmitting and receiving antennas are separated to employ a low-power continuous wave, their isolation and co-linearity must be satisfactory. Second, depending on the maximum detection range, a wide receiver dynamic range of at least 90 dB is often required. Finally, it requires a huge amount of computational power for the correlators to cover all required ranges and Doppler bins.
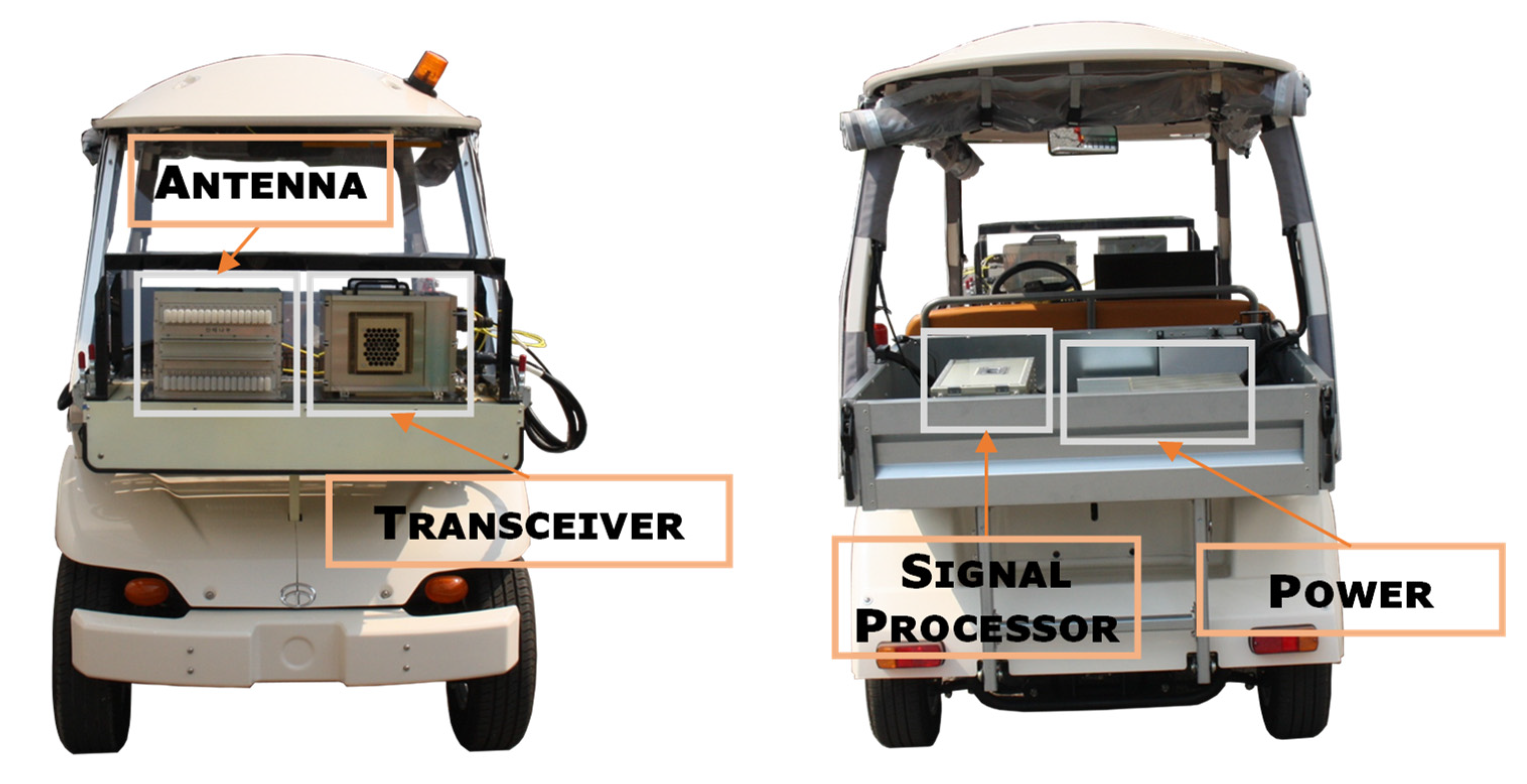
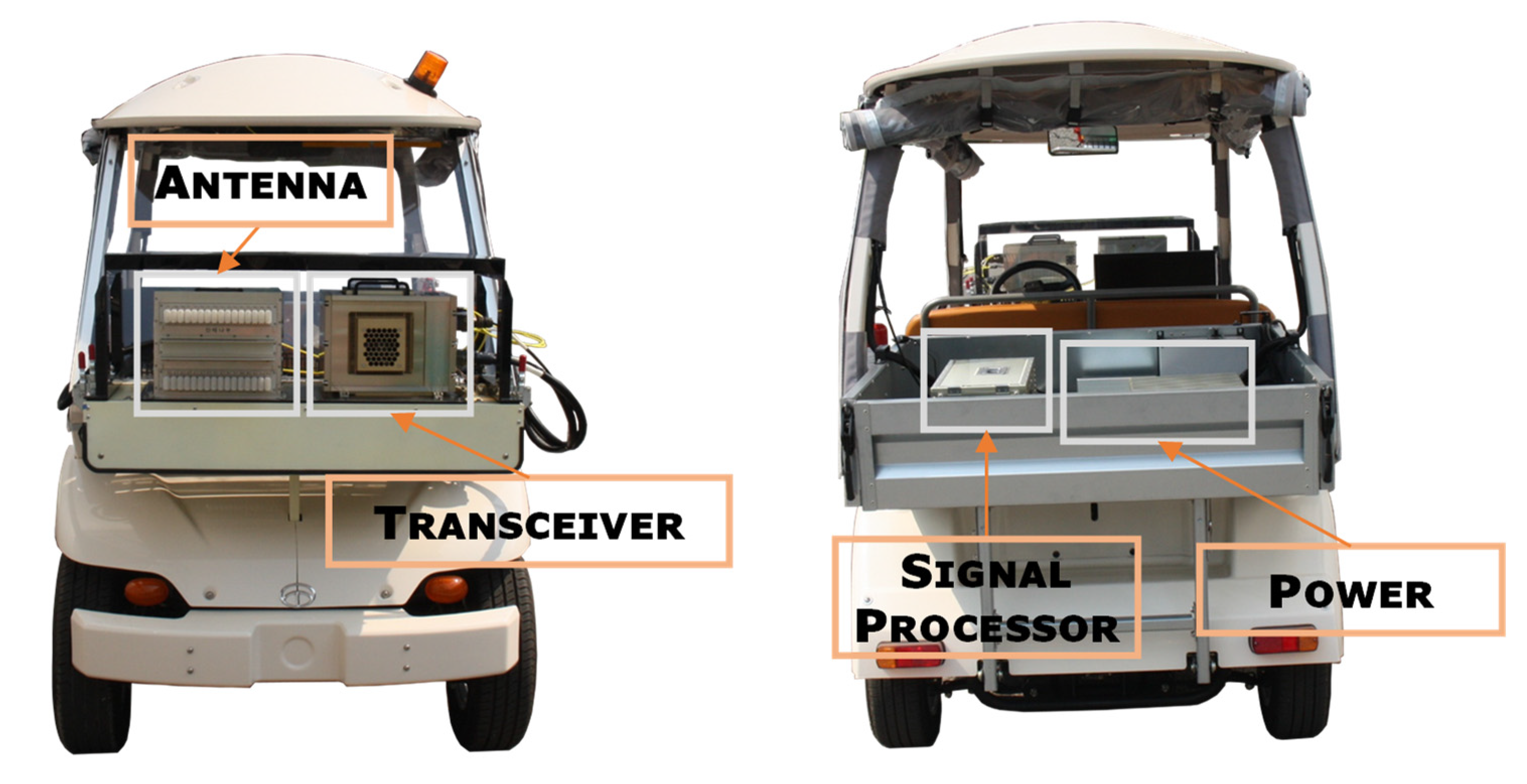
In this study, we developed and tested a wideband noise radar that operates in a ground-moving vehicle. It operates in the X-band, with an instantaneous bandwidth of 1.5 GHz. The antenna is made up of linear arrays. The receiver was built using high-speed digital electronics, including ADCs and FPGAs. This system has a wide bandwidth of up to 15% of the center frequency and a beamformer that uses a true time delay (TTD) to prevent pattern distortion in the array antenna using phase shifters. Furthermore, by employing the time-division method, the FPGA’s computational resources for implementing correlators are reduced to a quarter.
TTD employs the time delay of the actual path difference. Consequently, unlike the phase shifter, it preserves the beam pattern even when the signal has a wide bandwidth [
5,
6,
7,
8,
9]. However, because the physical size is large, the maximum delay time is bounded, and the implementation of a large number of arrays is limited. Sub-array network structure in parallel with phase shifters was introduced to reduce the number of TTDs [
10]. If all array signals are converted to digital data, the analog TTDs are removed, and the same performance can be achieved with digital delays and FIR filters [
11,
12]. In this case, high-speed ADCs and a large amount of memory are required to convert wideband signals, and filters must be designed for each array and the desired direction. In this study, we used an antenna with 16 arrays, each with TTD.
The following section introduces the structure of the wideband noise radar, beamformer using TTDs, and signal processor. The developed system is described in
Section 3.
Section 4 presents the experimental results, and finally,
Section 5 summarizes the conclusion.
2. Noise Radar Waveform Generation and Signal Processing
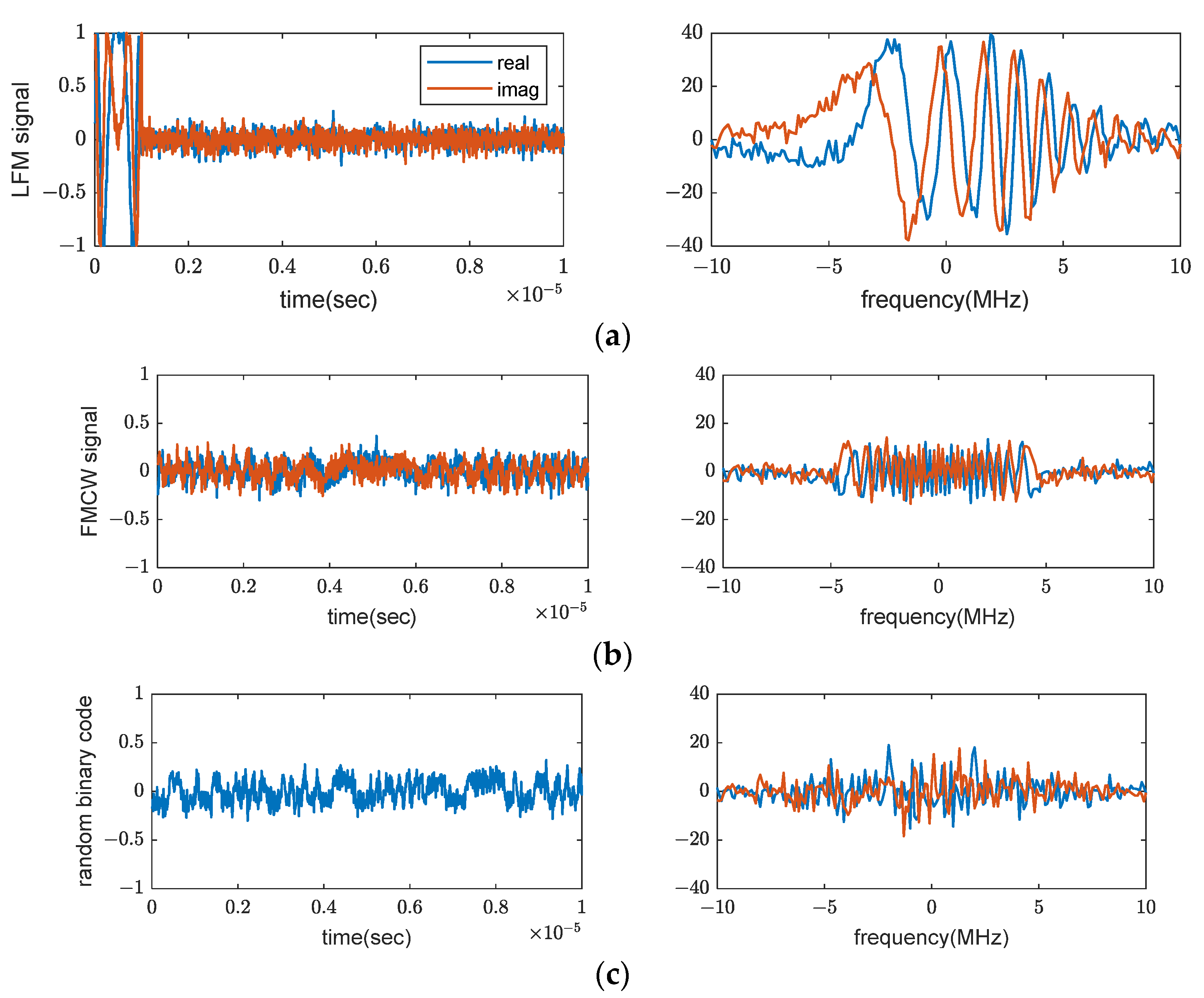
Compared with the pulse doppler radar using linear frequency modulated waveform (LFM), noise radar uses a continuous signal that appears to be random noise. Therefore, the average power can be very low, and the waveform is not deterministic.
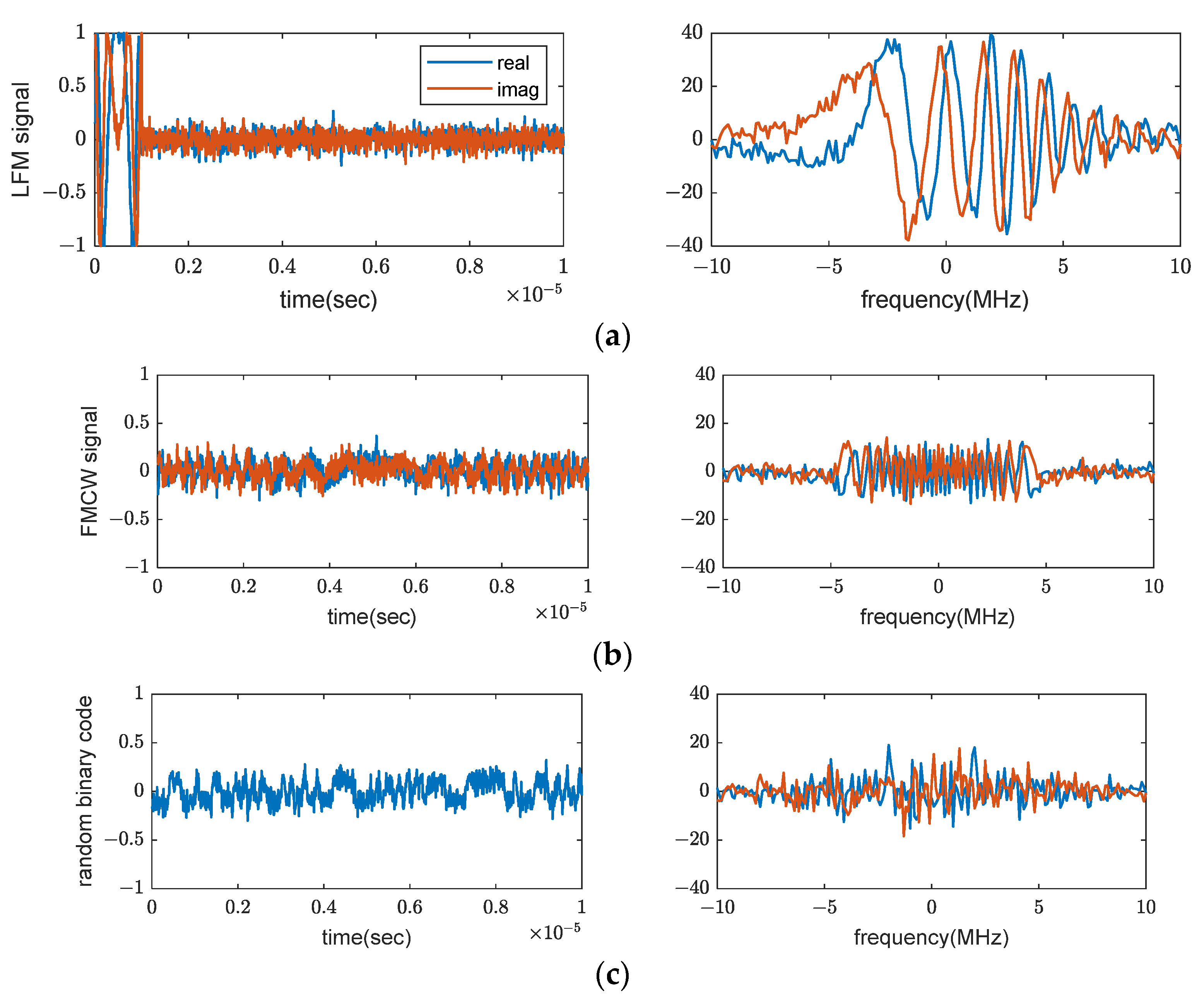
Figure 1 shows baseband signals: the LFM pulse, the frequency modulated continuous waveform (FMCW), and the random binary code. The time domain signal is shown on the left side, and the frequency domain signal is on the right side. The bandwidth is 10 MHz, and the average signal-to-noise ratio (SNR) is 10 dB for all. The duty cycle of the LFM pulse is 0.1.
The high power of the pulse and the pulse repetition provides characteristics to be easily detected. For the same noise level, the continuous waveforms can have lower power than the pulsed ones, which supports the LPD property. When the noise signal becomes large, this effect becomes significant. Moreover, random codes outperform continuous waveforms because they do not exhibit a deterministic pattern in the time and frequency domains and have no start or finish time.
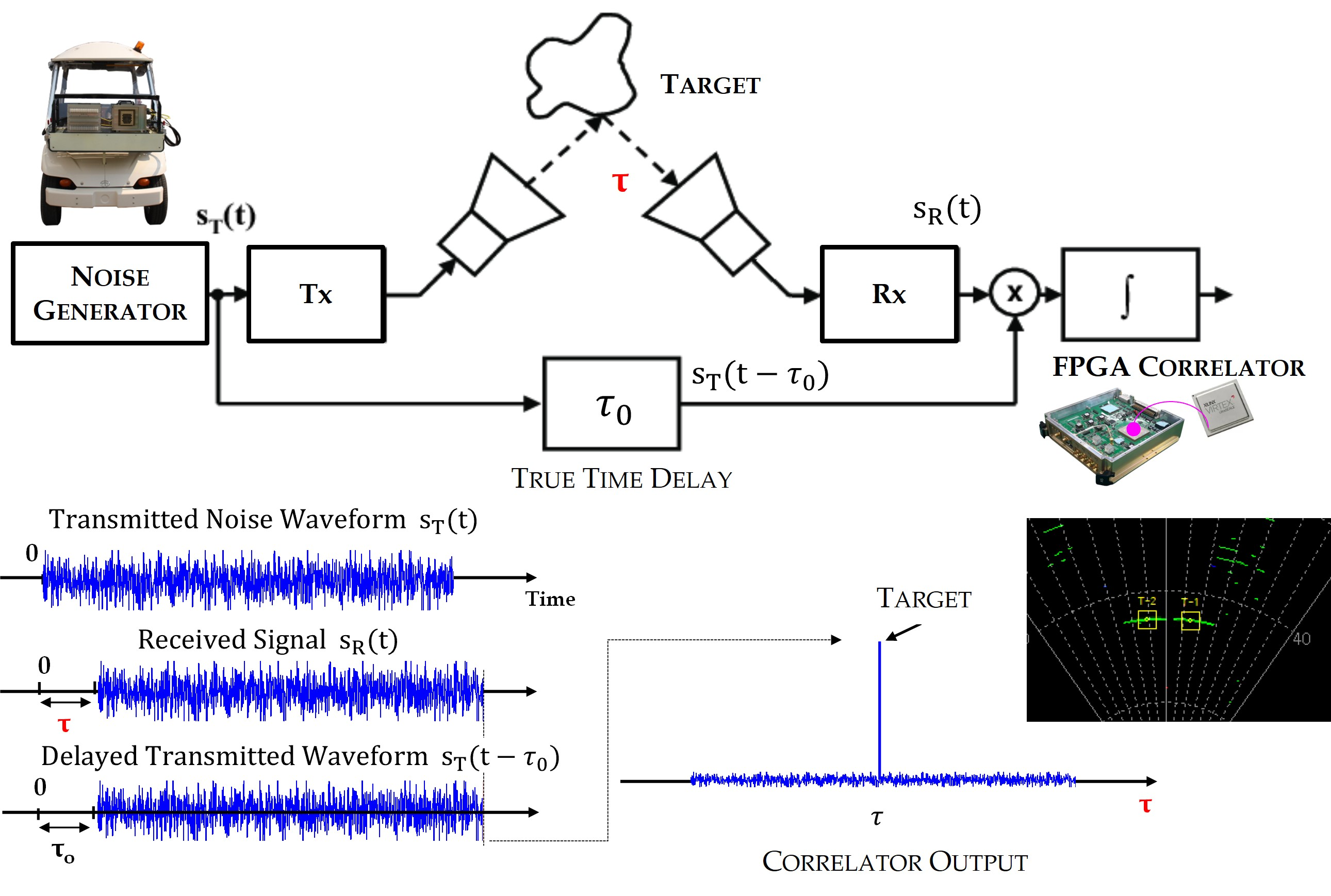
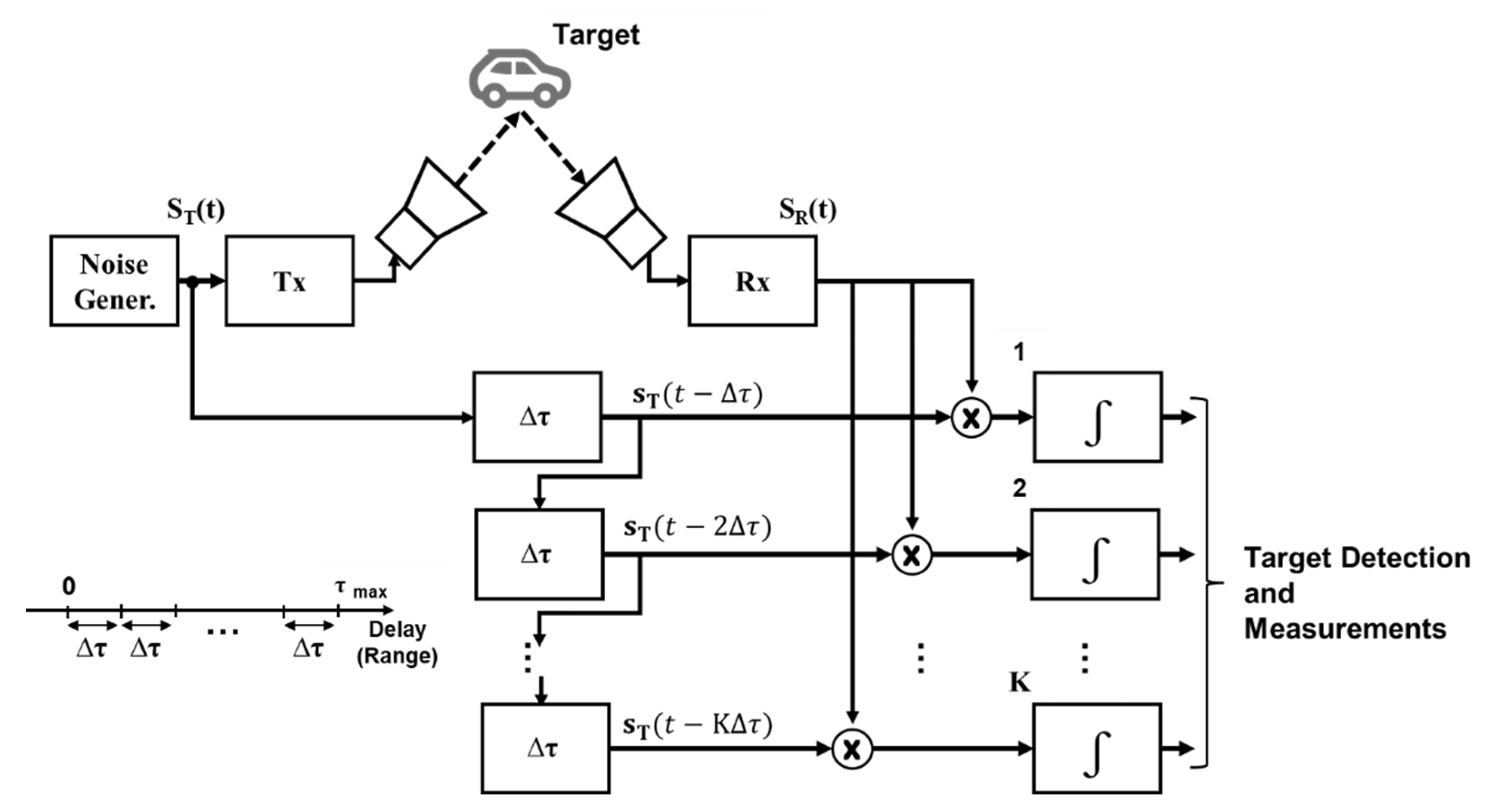
The biggest drawback of random noise radar is the complicated hardware, including the correlators.
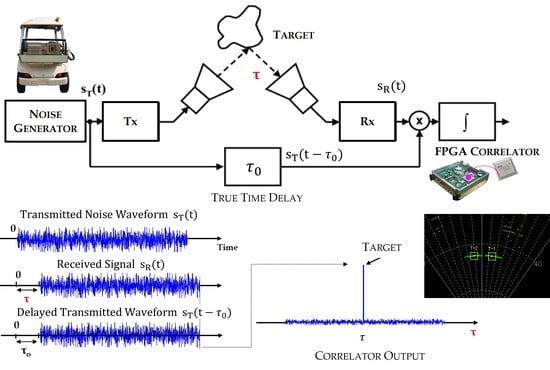
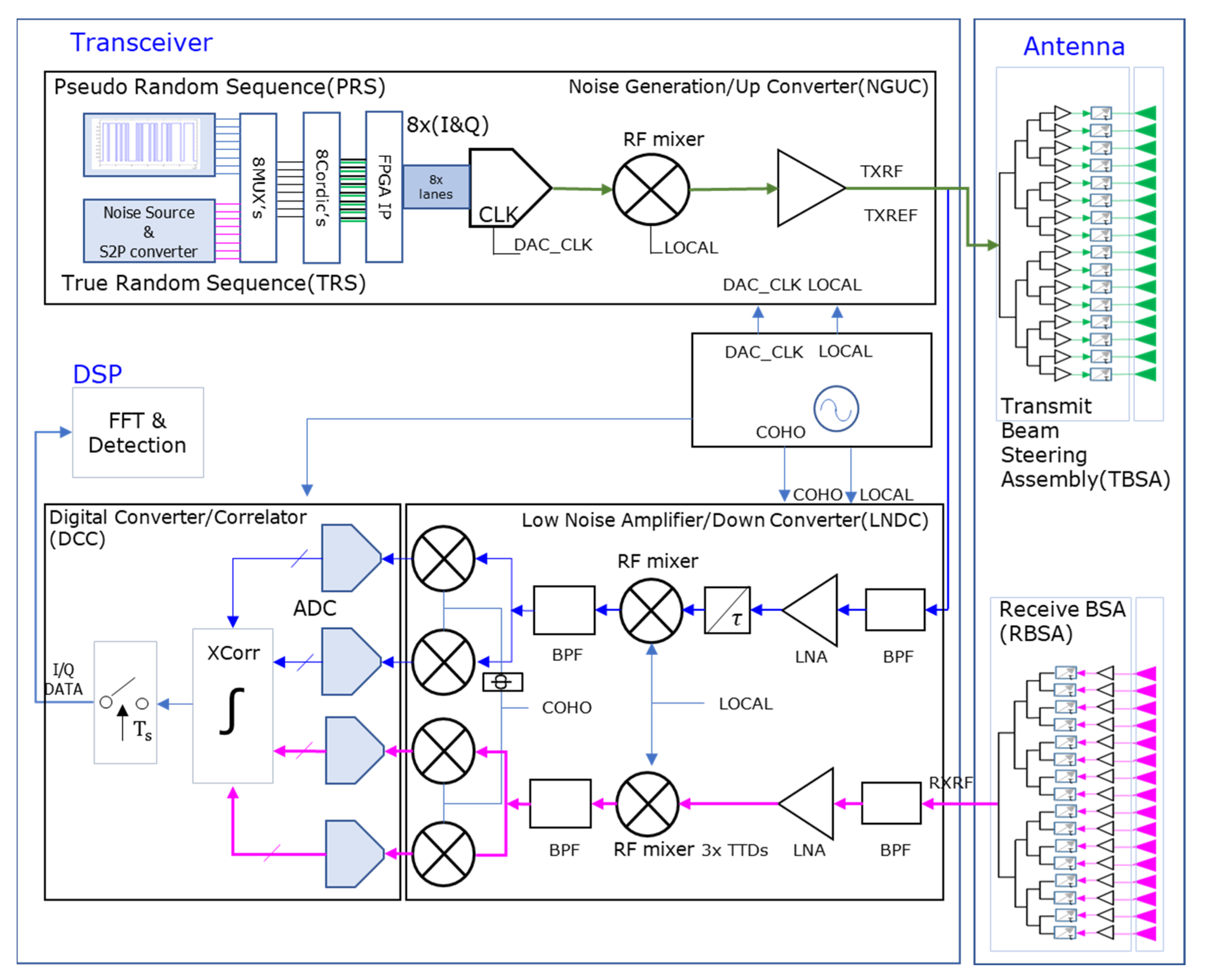
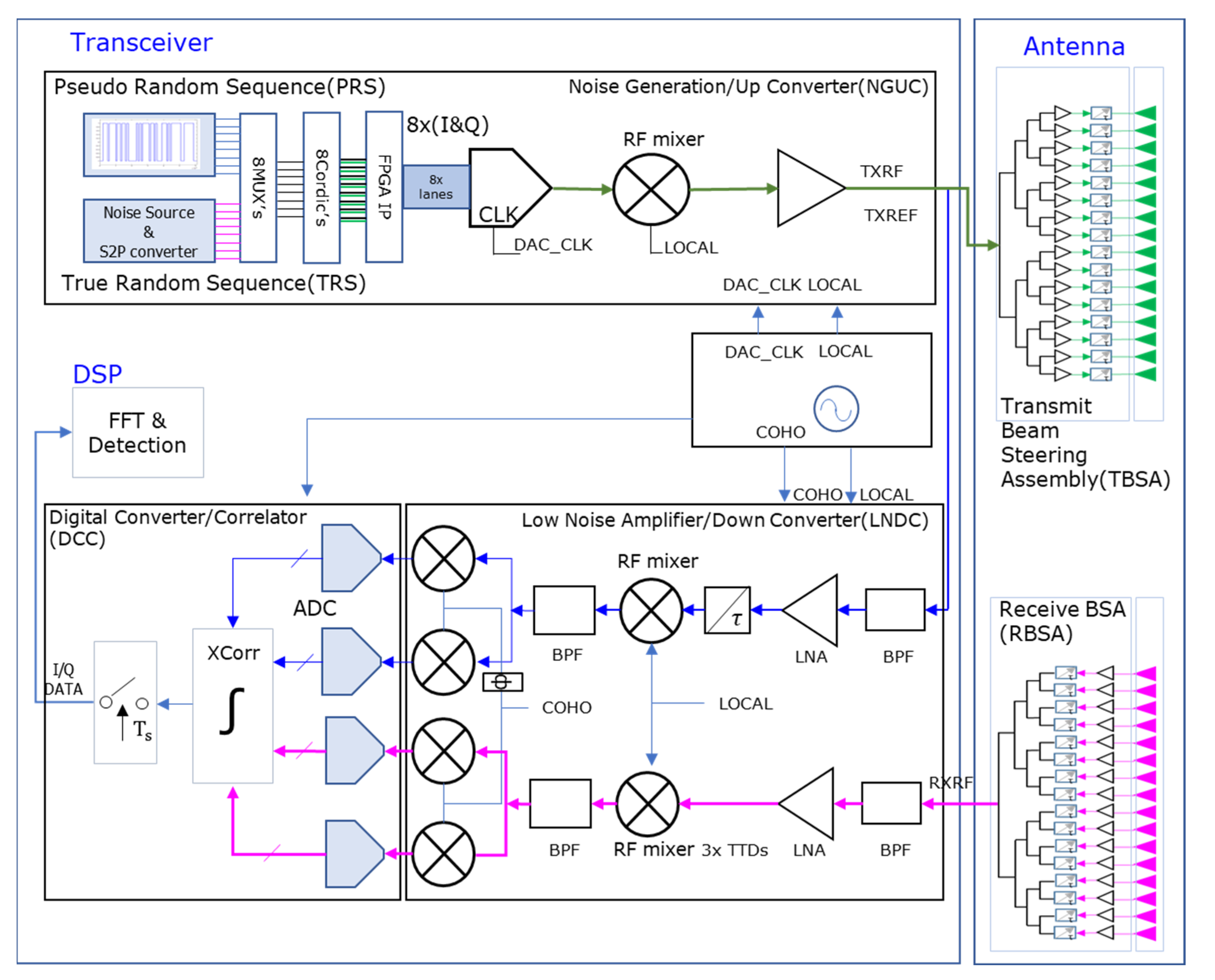
Figure 2 illustrates a noise radar, which consists of a noise signal generator, transmitter antenna, receiver antenna, and correlators in the receiver. Unlike other radars that use a predetermined waveform, the correlation must be performed with a real-time generated random signal, which requires real-time digital conversion of the transmitted signal. A random noise signal is generated by the thermal noise of an analog circuit, which is the genuine noise source, or by a digital pseudo-random sequence (PRS). The bandwidth in the PRS is defined as the minimum pulse width, and its generation is relatively simple.
2.1. Noise Waveform Generation
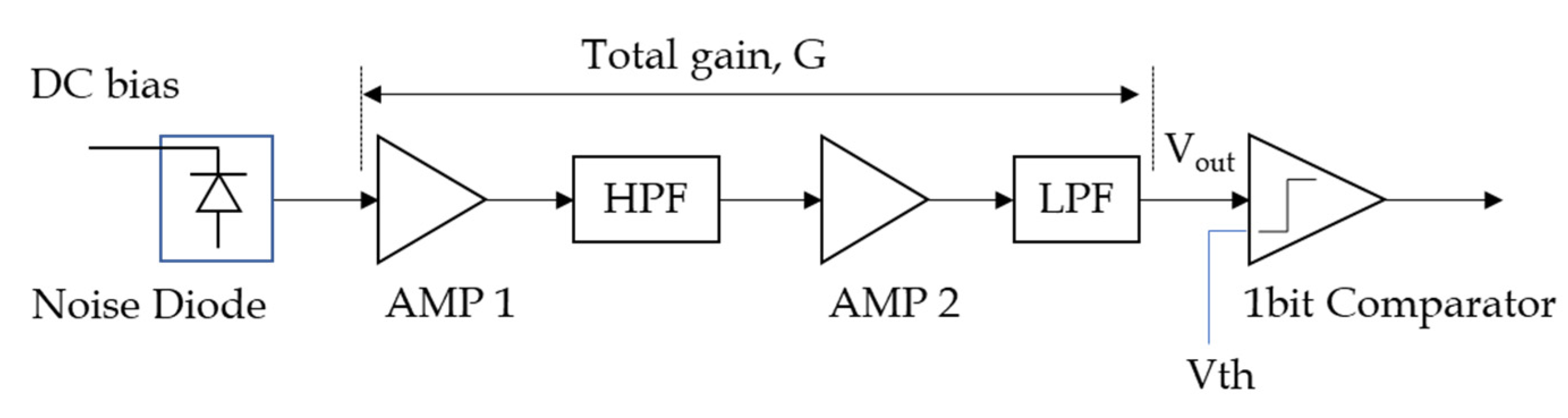
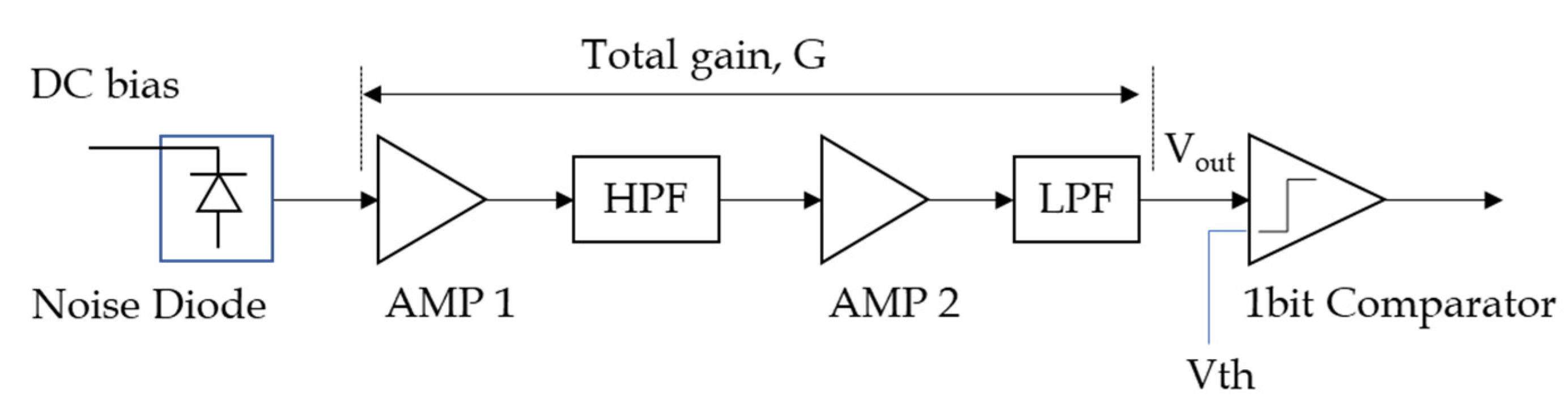
Analog noise generation is implemented by a diode, amplifier, filters, and 1-bit comparator, as shown in
Figure 3. A high-pass filter (HPF) and a low-pass filter (LPF) determine the bandwidth. Considering the noise signal near the DC and amplifier gain characteristics, the cutoff frequencies of the HPF and LPF were set to 150 MHz and 1.2 GHz, respectively, to generate a one-sided bandwidth of 750 MHz. A 1-bit high-speed comparator converted the analog noise signal into digital signals. The conversion speed to handle the minimum pulse width is a few Giga samples per second (Gsps).
The gain of the amplifier can be expressed as the following equation.
where
is the power spectral density of the noise diode [dBm/Hz],
is the bandwidth (Hz),
is the input resistor, and
is the root-mean-squared (RMS) value of the output voltage (V).
On the other hand, PRS is generated by FPGA using white Gaussian noise generator (WGNG) IP provided by Xilinx, which combines the Box–Muller algorithm and the central limit theorem to generate white Gaussian noise. The Box–Muller algorithm generates a variable with a normal distribution by transforming two independent random variables with uniform distributions [
13].
2.2. Array Antenna and Wideband Beamforming with TTD
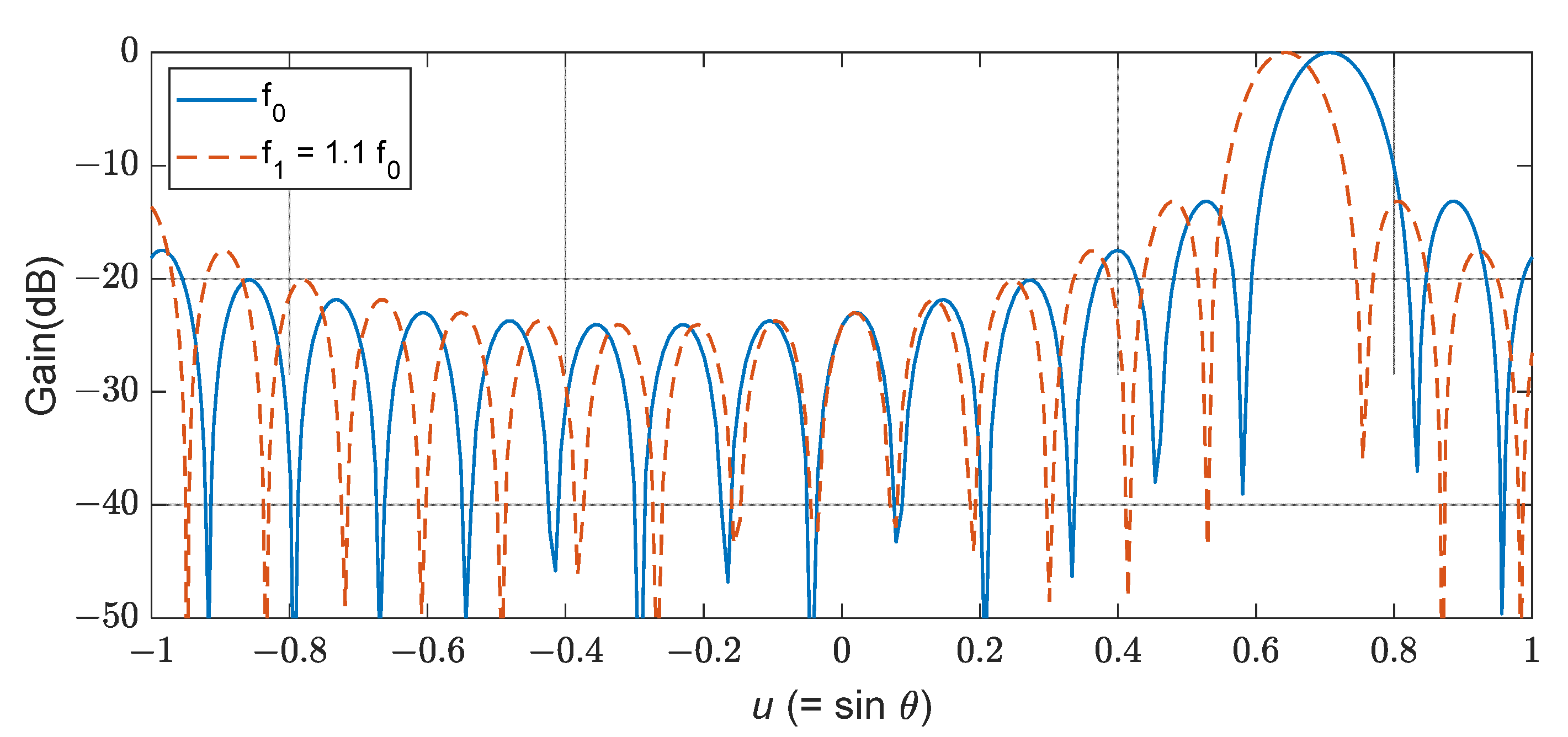
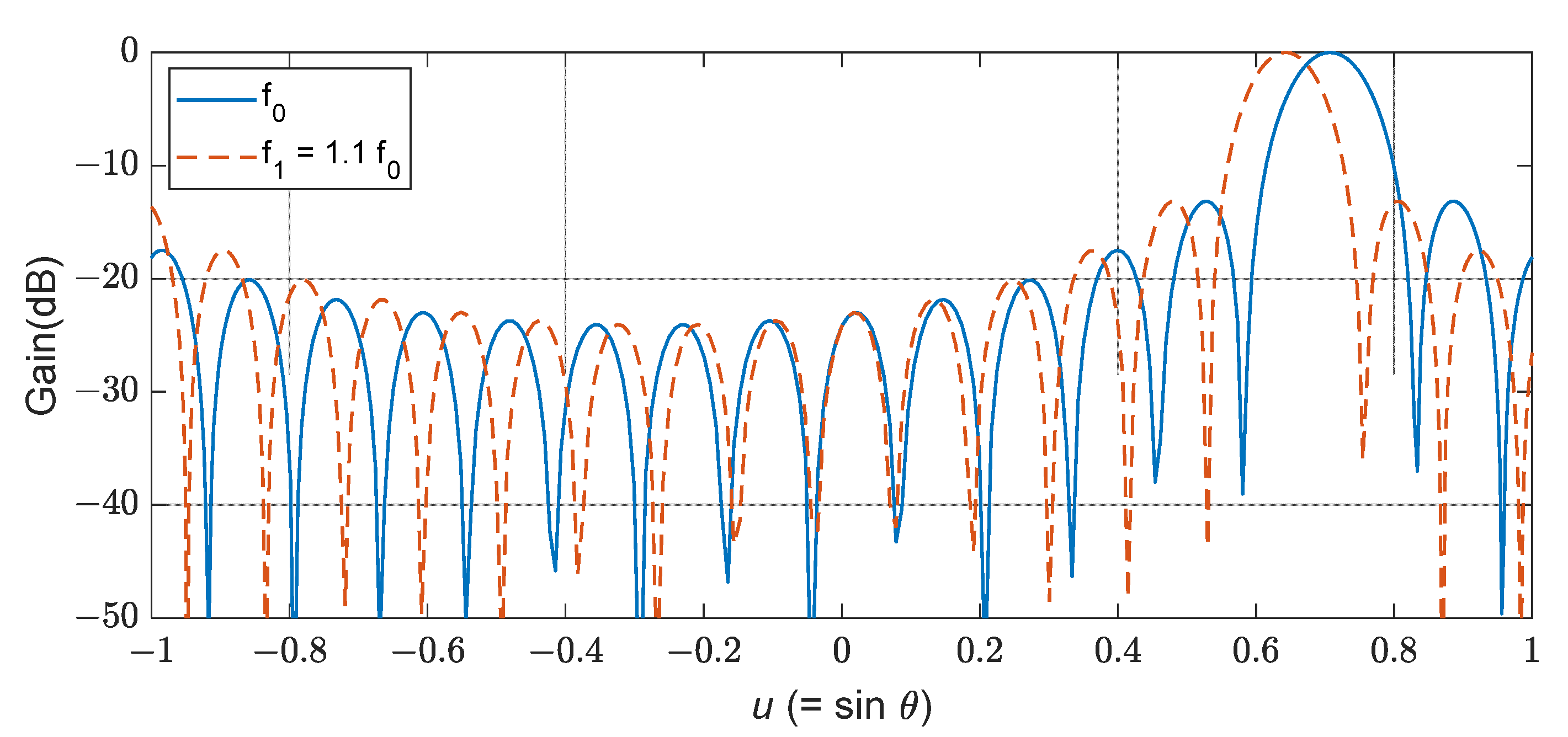
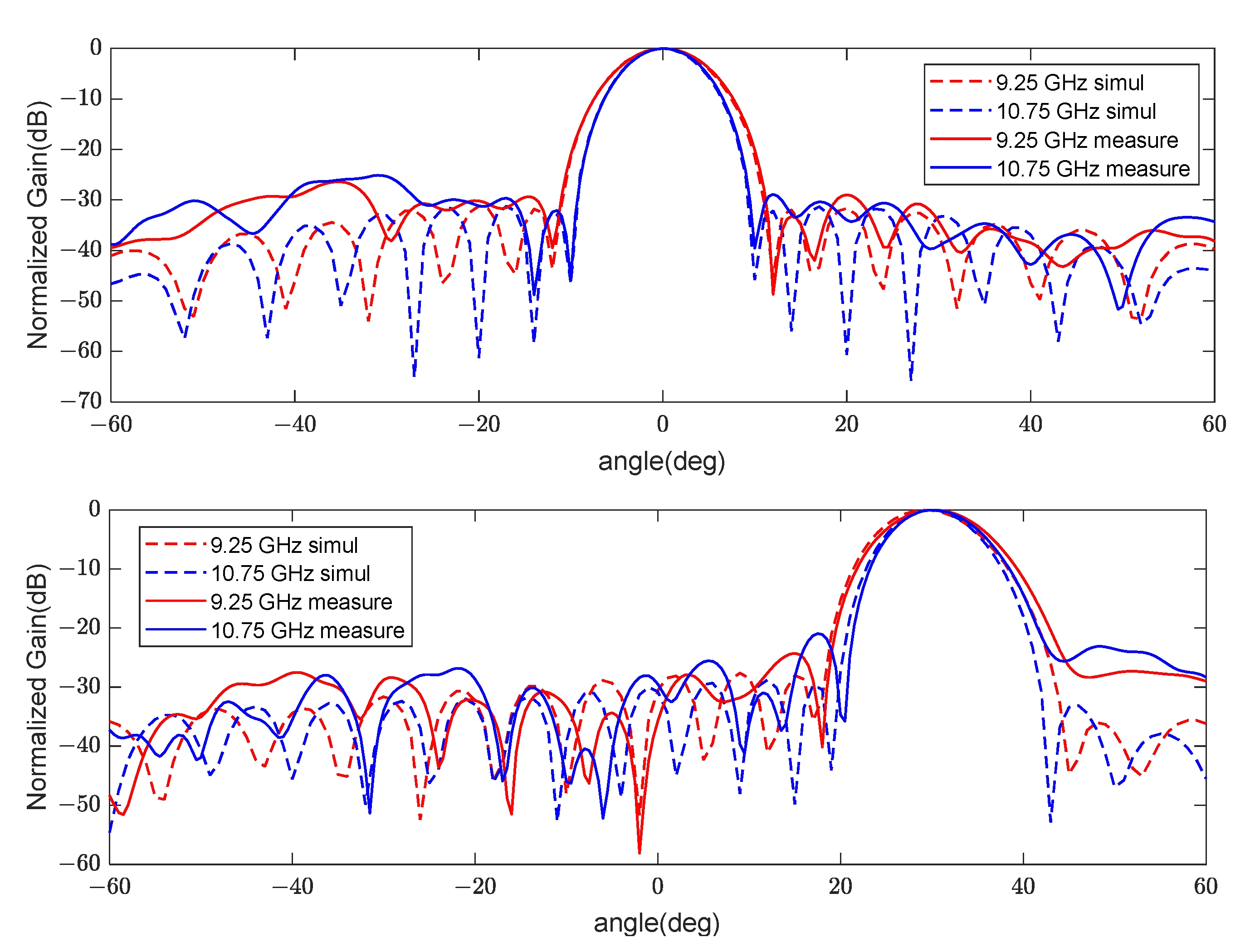
If the instantaneous bandwidth increases, the beamforming by the phase shifters squints the boresight angle, shifts nulls, increases the sidelobe level and widens the beamwidth. Consequently, the angle measurement performance becomes poor [
14,
15]. Thus, we adopted the true time delay to increase the bandwidth up to 15%.
The detailed equations can be found in [
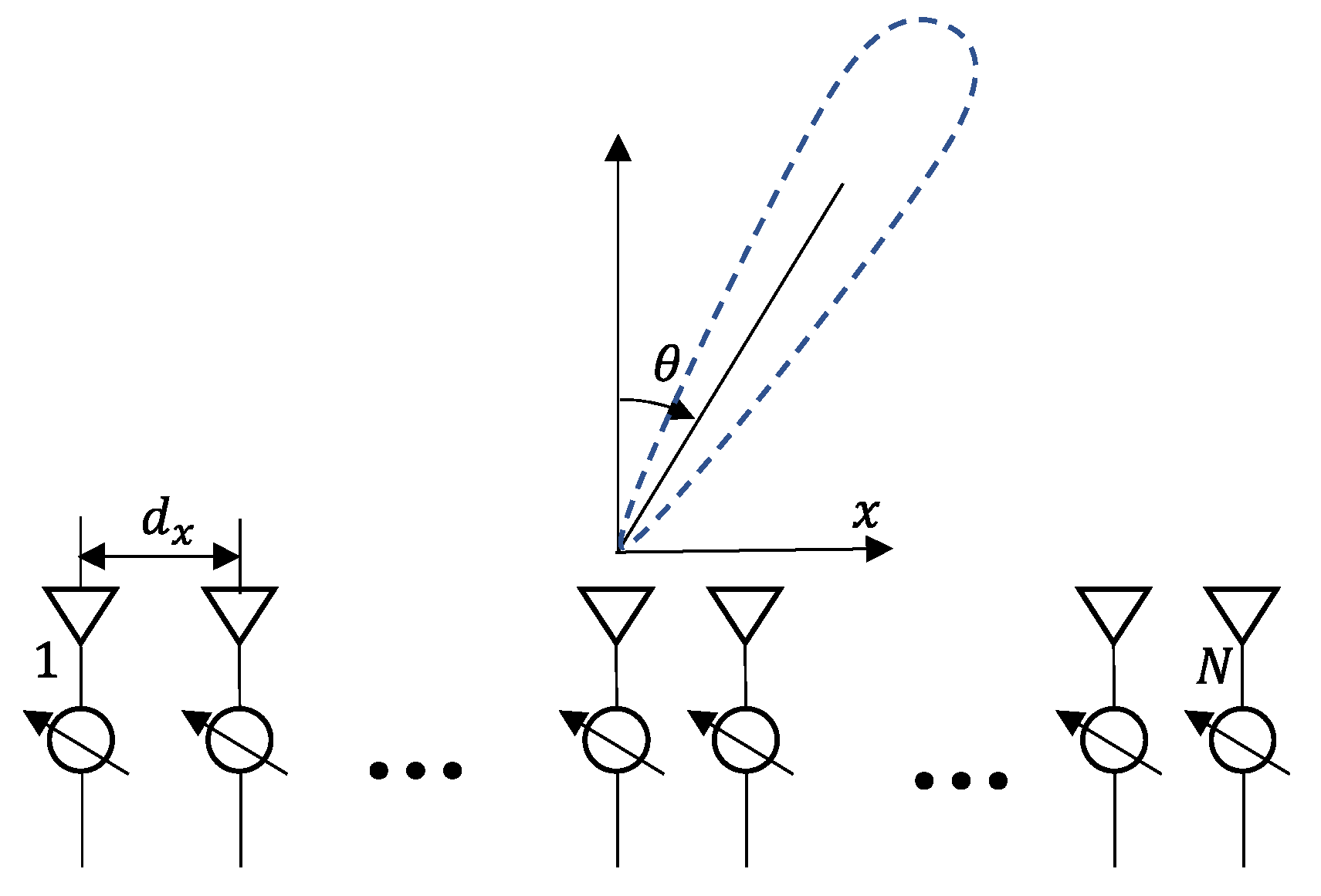
10] and are summarized below. Normalized radiation pattern in the far-field with one-dimensional (1D) uniform arrays in
Figure 4 is expressed as
where
is the input direction,
is the complex weight of each array element,
is the distance between the two arrays, and
is the pattern of each array, assuming that the patterns of all elements are equal. In the case of a single frequency,
that maximizes the signal in the
direction can be selected as follows:
Then, the array pattern is
The phase of the complex weight
is typically implemented using a phase shifter with a value of
for the nth array. This is because
can be assumed to be constant for a single frequency or a narrow bandwidth. However, if the bandwidth increases and this assumption is no longer valid, the implementation by phase shifters results in a squint of the boresight angle, beam broadening, and so on.
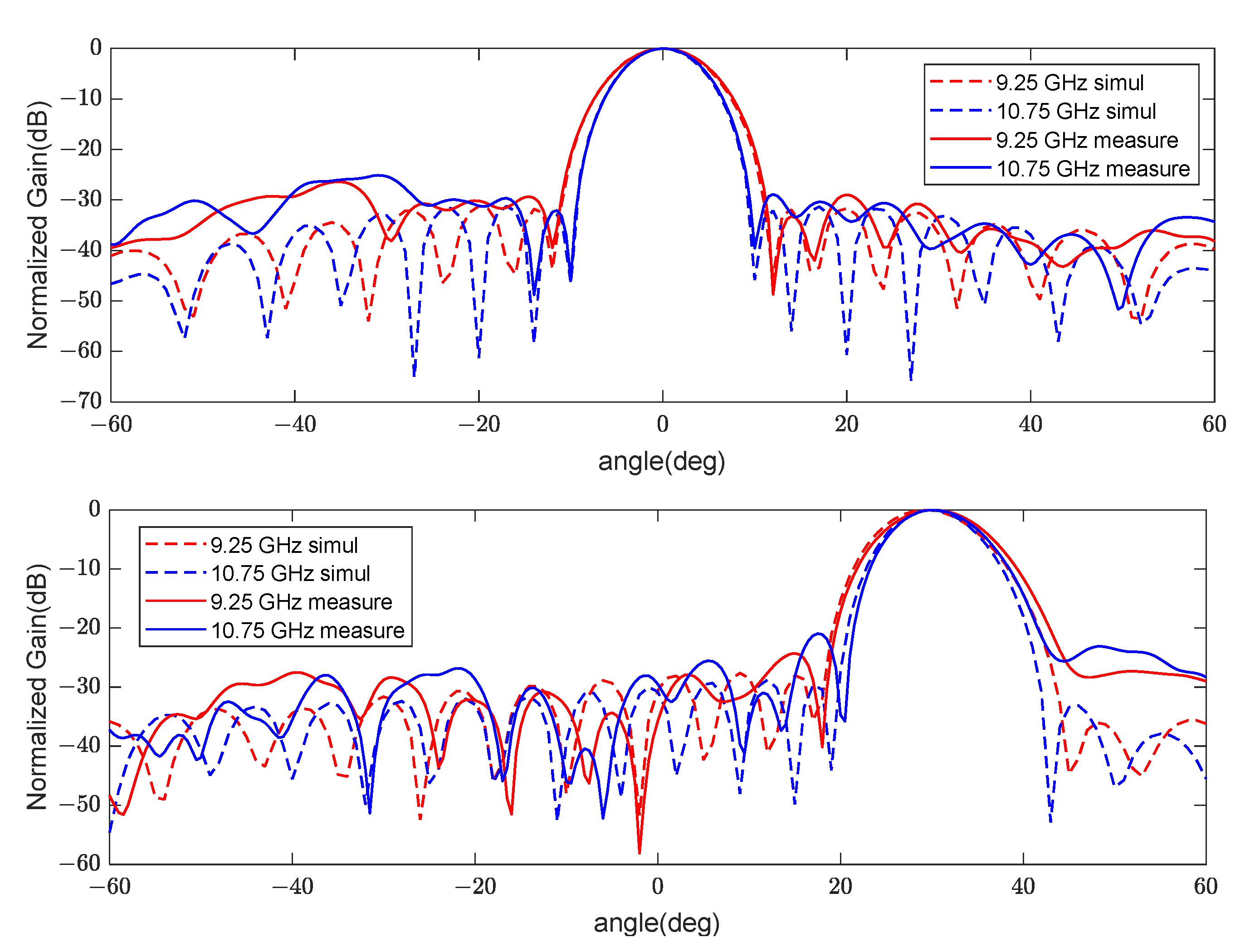
Figure 5 shows the squinted boresight angle for a 10% shifted frequency.
However, the TTD can maintain the pattern for a wide bandwidth because it employs the time delay of the actual path difference. The pattern is expressed by
The time delay of two consecutive arrays is , and the maximum delay is , which increases as the number of arrays increases. is typically chosen to be half of the wavelength. In this study, the radar is designed to operate in the X-band (10 GHz), and is half of the wavelength (0.015 m). To cover the maximum angle of 30° with 16 arrays, the maximum delay is 375 ns . The TTD component used for beamforming is RMF040160PA from RFCORE, which operates at 4–16 GHz and contains a 6-bit TTD and a 6-bit digital step attenuator. The least significant bit (LSB) has a minimum delay period of 3.125 ps, which corresponds to 3.58° in the X-band. We utilized two in series to cover 30° because the maximum delay time was 197 ps.
Figure 6 shows a photograph of the fabricated antenna. The substrate of the radiation element was Rogers RO4003C with a dielectric constant of 3.38 and a thickness of 0.5 mm, and the radome was made by Teflon with a dielectric constant of 2.1. The dimensions are 63.6 mm (L) × 46.0 mm (W) × 13.0 mm (H), with a Pw of 10 mm. The measured pattern will be provided in
Section 3.
2.3. Digital Correlators and Resource Savings
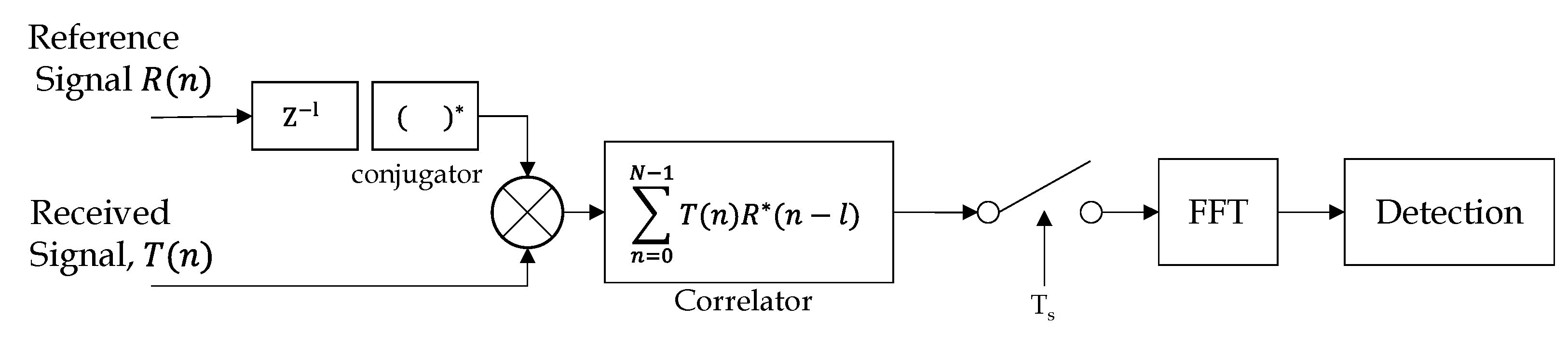
The input of the correlator is data obtained by digitally converting the transmitted and received signals. The received signal is multiplied by the delayed transmitted signal and accumulated by N pieces of data [
4].
where
is the reference transmitted signal,
is the received signal, * means the complex conjugate and
L is the number of range cells and correlators. The sampling rate of the data, that is, the chip period
, is 0.666 ns (1.5 GHz), and the correlation time
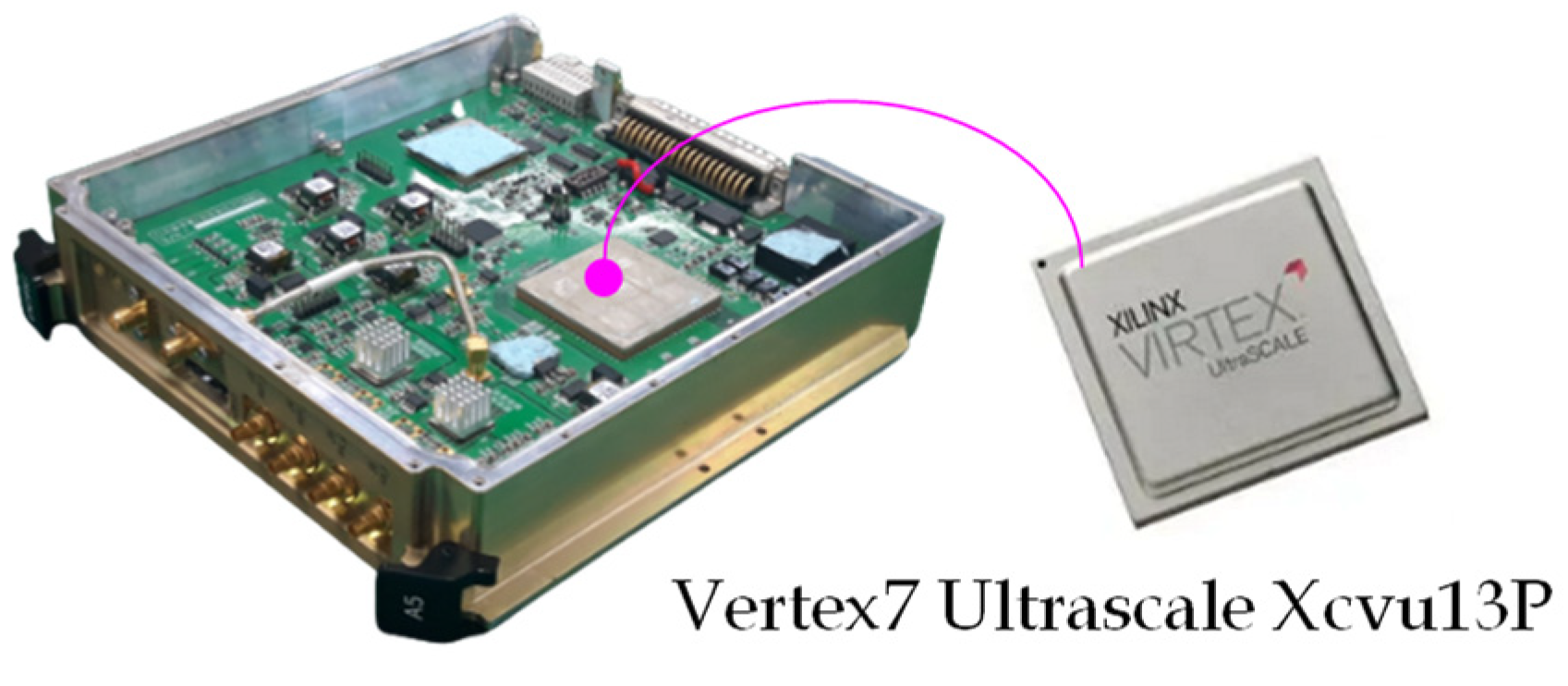
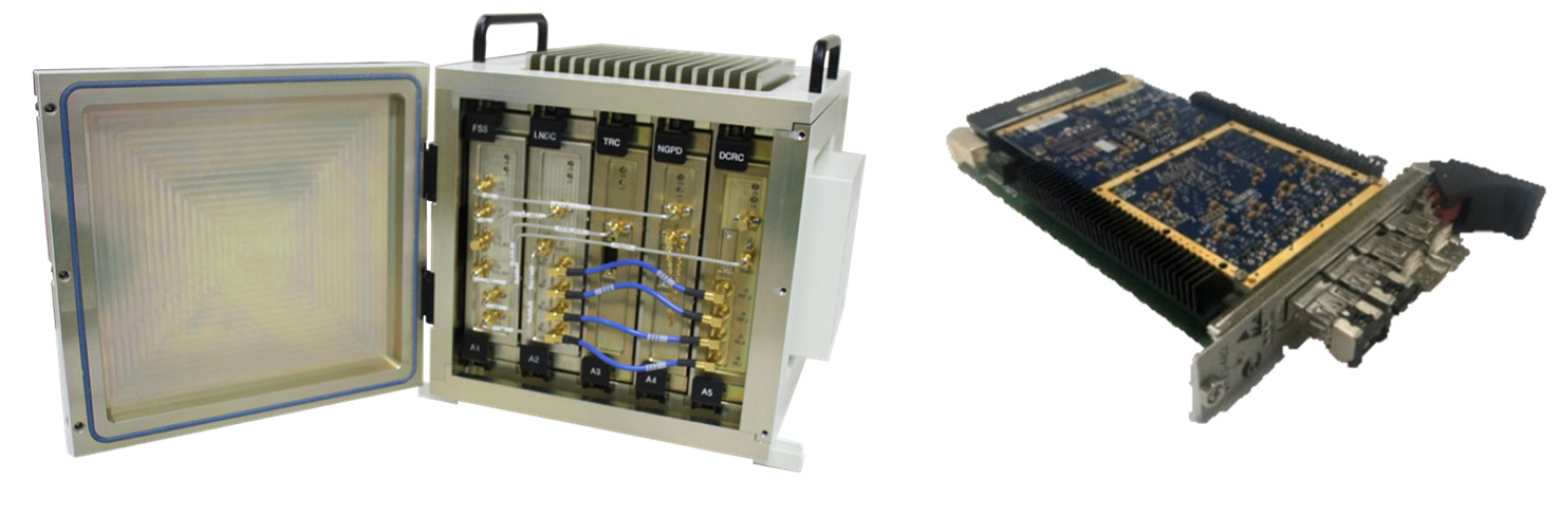
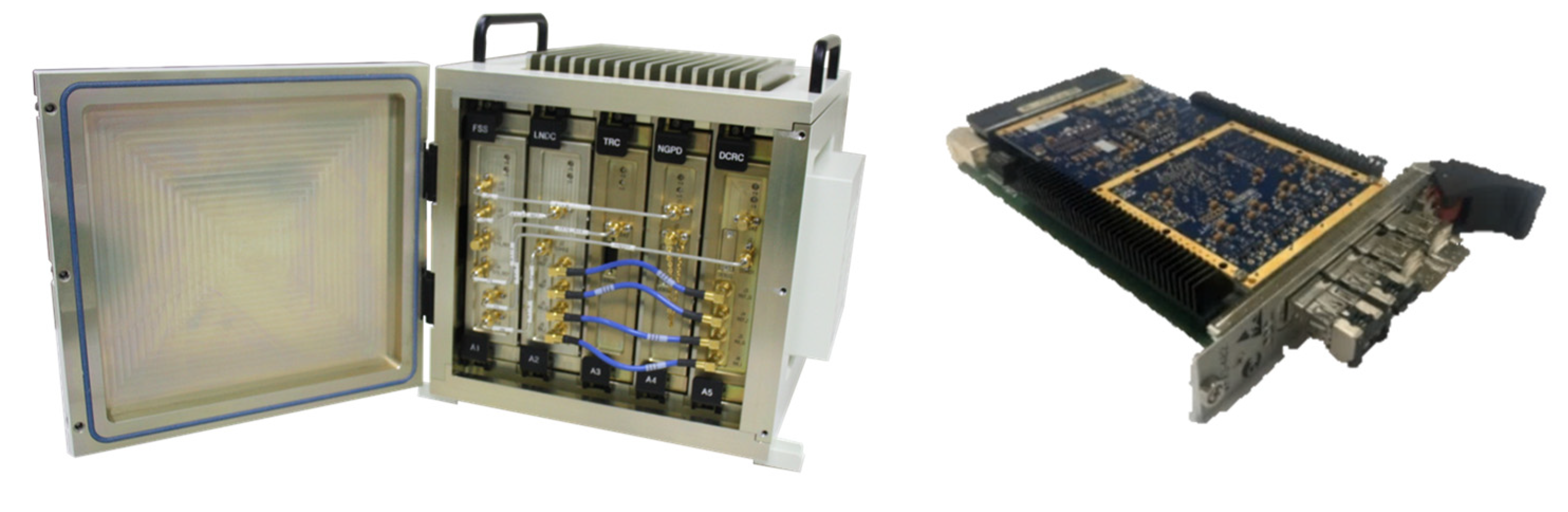
is 117 ms. Because the number of correlated data is 175,670, the gain is considerable such that low-power detection can be implemented. The correlators were developed in parallel using Xilinx’s Vertex 7 Series FPGA, shown in
Figure 7. The number of correlators
L, which is the primary factor affecting FPGA resources, determines the detection range.
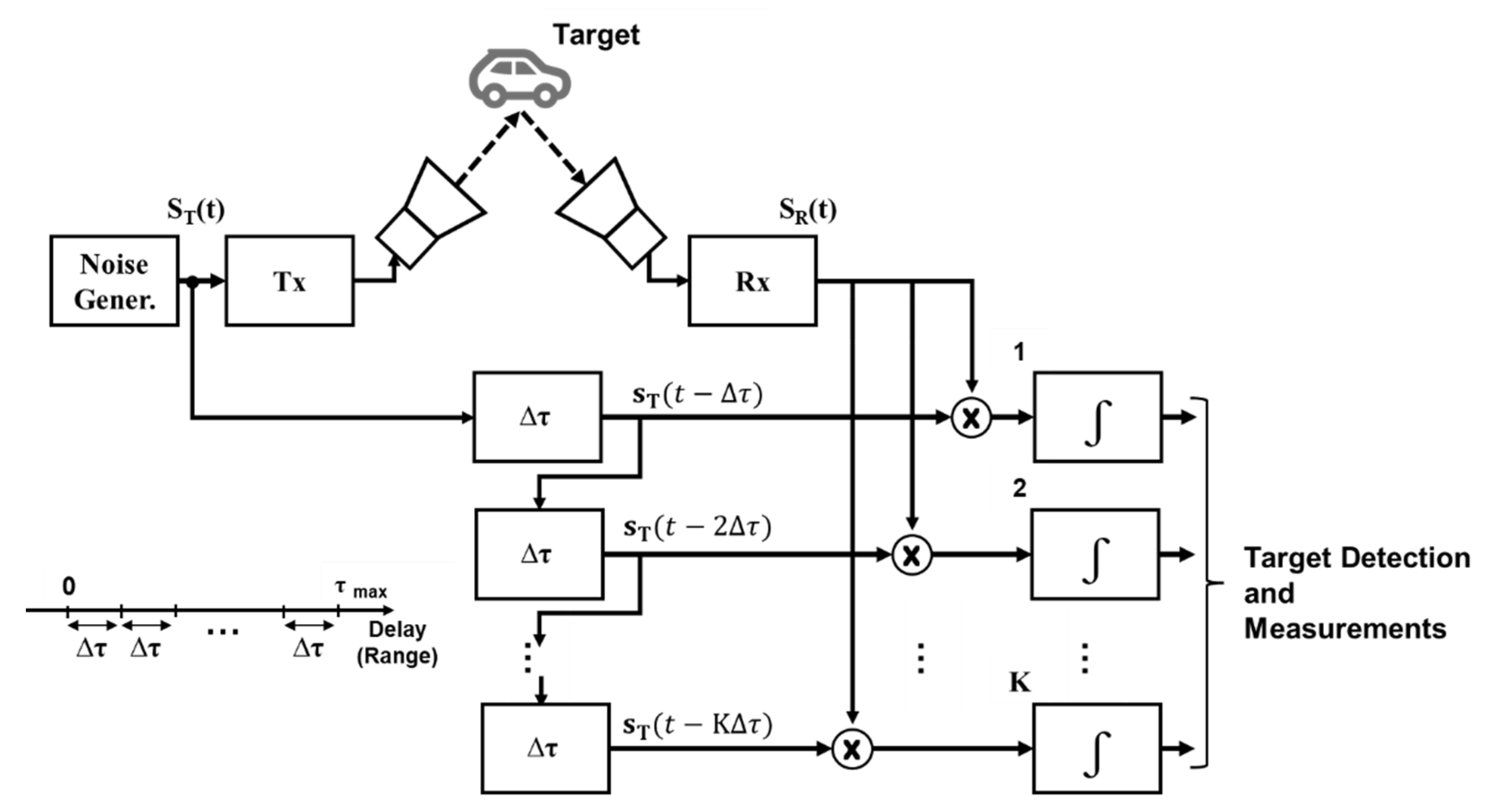
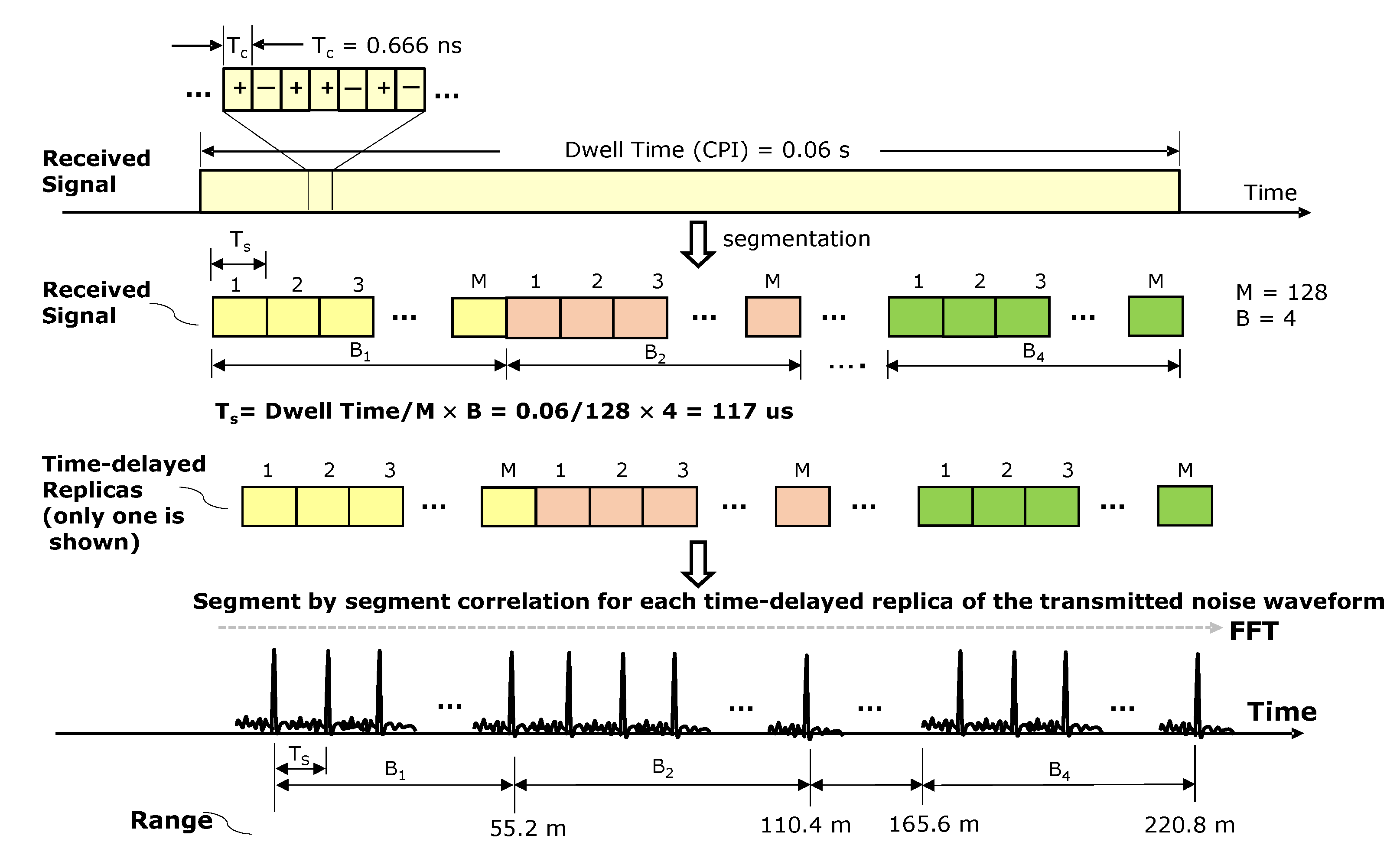
In this study, at least 2200 correlators are required to implement the 220 m range, which necessitates a significant amount of FPGA resources. To reduce these resources, we divided the distance into four ranges and processed them sequentially. That is, the time delays of the correlators are changed periodically over four times, covering a distance of 55.2 m at a time, as shown in
Figure 8. With this method, we could reduce the FPGA resources by a quarter. For each quarter distance, the output of the correlator was doppler-processed 128 times in a digital signal processor (DSP). Constant false alarm rate (CFAR) detection was then performed. The whole processing chain is described in
Figure 9.
5. Conclusions
In this study, an X-band noise radar with 15% bandwidth was developed. A TTD was applied to correct the distortion of the beam pattern owing to the wideband, and correlators were implemented by high-speed parallel processing through the FPGA. In addition, by employing the time-division method, the FPGA’s computational resources for implementing correlators were reduced to a fourth.
The angular resolution was rather low compared with the range resolution because the X-band was chosen. In the future, it will be necessary to choose a higher frequency band to increase the angular resolution without expanding the physical size of the radar, which can also increase the range resolution.
We expect that the use of noise radar will increase because of its low detectability and low interference properties, particularly in environments where multiple radars operate in the same band, as well as in military radars.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}