
Machine Learning Approaches to Automatically Detect Glacier Snow Lines on Multi-Spectral Satellite Images

 ,
, 
 and
and 
Abstract
:1. Introduction
2. Data
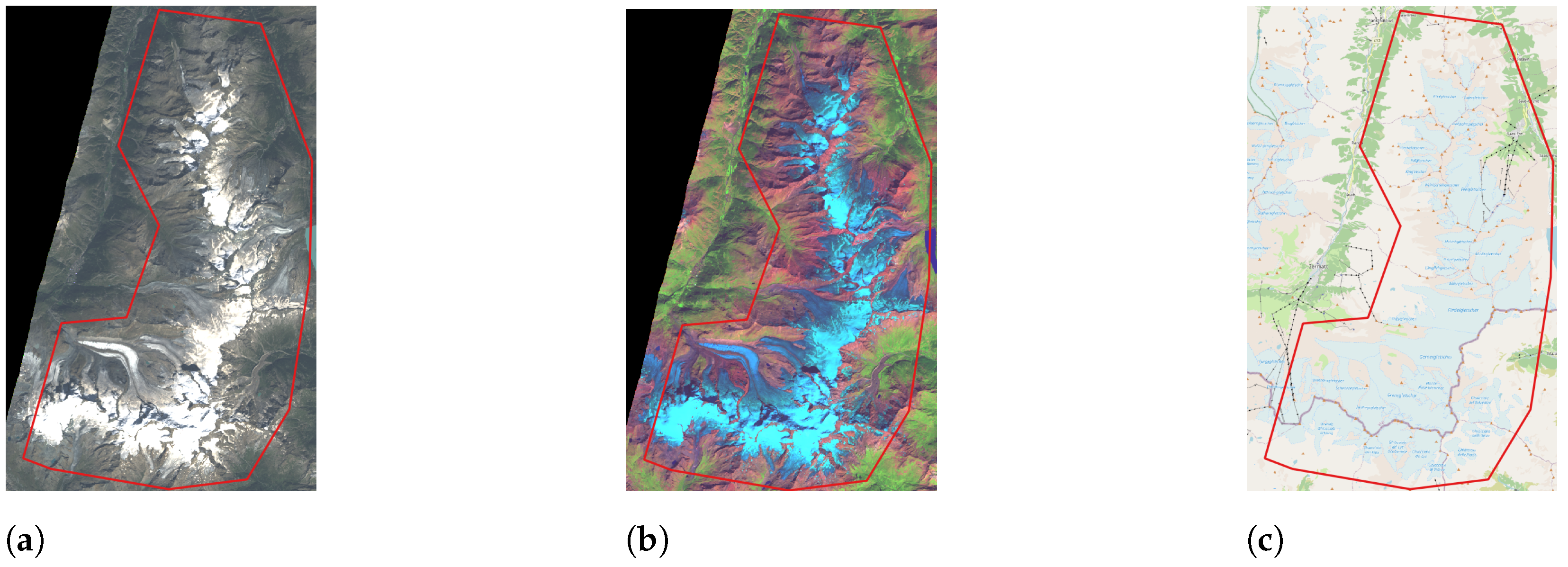
2.1. Study Area
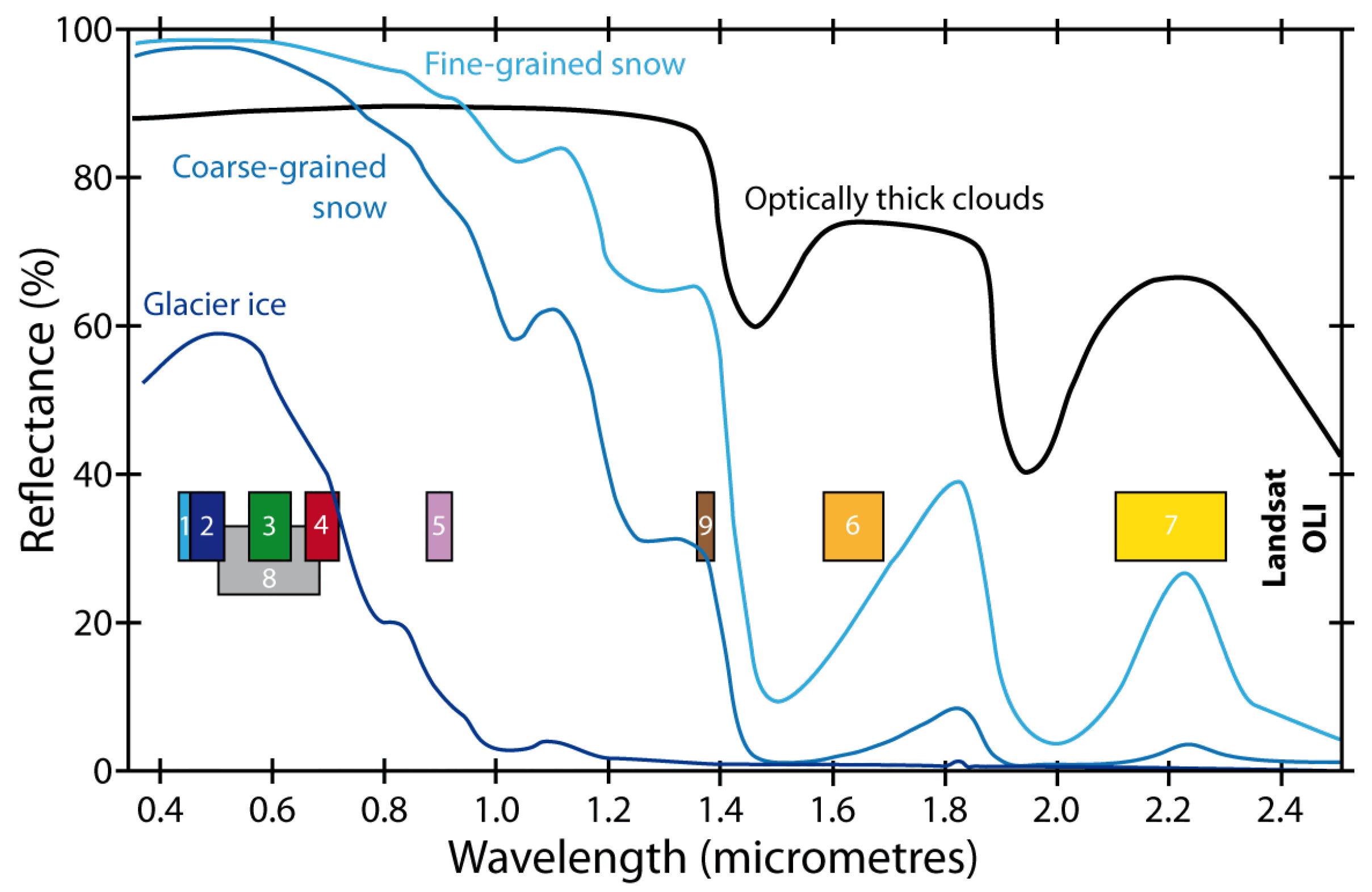
2.2. Optical Imagery: Landsat 8 Products
2.3. Digital Elevation Model
3. Method
3.1. Overview
- A pixel-wise classification workflow, designated as extraction in the flowchart, which provides a binary or probability map of ice and snow cover on a glacier.
- A snow line detection workflow, which uses the result of the classification workflow and the Copernicus’ DEM to provide an estimated snow line on each glacier.
3.2. Data Set
3.2.1. Snow Line Annotation
3.2.2. Glacier Inventory
3.2.3. Data Set Construction
- One data set with pixels with the label “mountain’s shadow” or the label “illuminated areas”, used in the mountain’s shadow extraction task.
- One data set with pixels with the label “ice or snow” or the label “foreground areas”, which corresponds to the mountainous areas within the glacier outlines of 2015 [20] that are not covered by ice or snow anymore at the time of acquisition. This data set is used in the glacier extraction task.
- One data set with pixels with the label “ice” or the label “snow", used in the ice and snow extraction task.
3.3. Pre-Processing
3.3.1. Cloud Cover Estimation
3.3.2. Glacier and Mountain’s Shadow Extraction
- Shadow extraction. Shadow extraction is a common pre-processing operation in land cover classification [31,32]. Indeed, such mapping can be useful for further processing of the shadowed areas, for instance, to have a shadow mask usable for further processing. For example, ref. [31] extracted mountain shadows to adjust their brightness properties for an altitude extraction method. However, we decided to discard the processing of such areas within our workflow by mapping them with standard machine learning algorithms. On the contrary, we rely on a support vector machine (SVM) approach that has been proven effective for shadow extraction of remote sensing images [31]. This is particularly true for the mountain’s shadow [32]. Thanks to the use of a DEM with a spatial resolution of the same order of magnitude as the acquisition and a solar azimuth map, it is even possible to build, for each acquisition, a rough estimate of the shadow areas by calculating the projected shadow of the DEM with respect to the solar azimuth map [32]. The resulting shadow mask provides a decent labeled data set to train another classifier for the acquisition [32].We hand-labeled a fixed data set for this study (Equation (1)) with several Landsat 8 scenes for different dates of acquisition during the melting season. However, such a workflow could then be implemented for the optimal use of SVM for the shadow extraction method with adaptive learning per date of acquisition [32].
- Glacier extraction. Ice- and snow-cover extraction compared to a foreground from pixel classification with classical supervised machine learning techniques, such as SVM, random forest (RF) or artificial neural networks (ANNs) [33,34,35] or object classification methods [35,36] is a popular topic and has already shown promising results [33,35].In order to produce a decent binary map of ice and snow to detect a snow line, we need to be sure to feed onto the last classifier of our method (ice and snow extraction, see Figure 2) only pixels of ice or snow. For this purpose we implemented another SVM trained upon a handmade data set from Landsat 8 scenes (see Table 2) to provide the last pre-processing step in order to isolate pixels of ice and snow from foreground pixels (Equation (2)).
3.4. Snow and Ice Detection
- A pixel classification approach to produce the same bitmap results as the previously mentioned shadow and ice and snow extractions for each glacier;
- A pixel regression approach to retrieve the probability of a pixel to belong to the ice or snow class to produce a probability map of belonging to ice for each glacier.
3.5. Snow Line Detection
3.5.1. Active Contour Snow Line Detection
- Elevation bins’ decomposition. This method assumes that a snow line should be considered as an area instead of a straight line [41].
- -
- First, we used the Copernicus DEM and decomposed it into elevation bins for each glacier. As the elevation values of the Copernicus DEM can sometimes have little variability given the extracted glacier, we ensured bin decomposition with regard to the number of elevation values within the extracted glacier. The fewer different elevation values are found in a given glacier, the less elevation bins are used for the snow line detection within this glacier.
- -
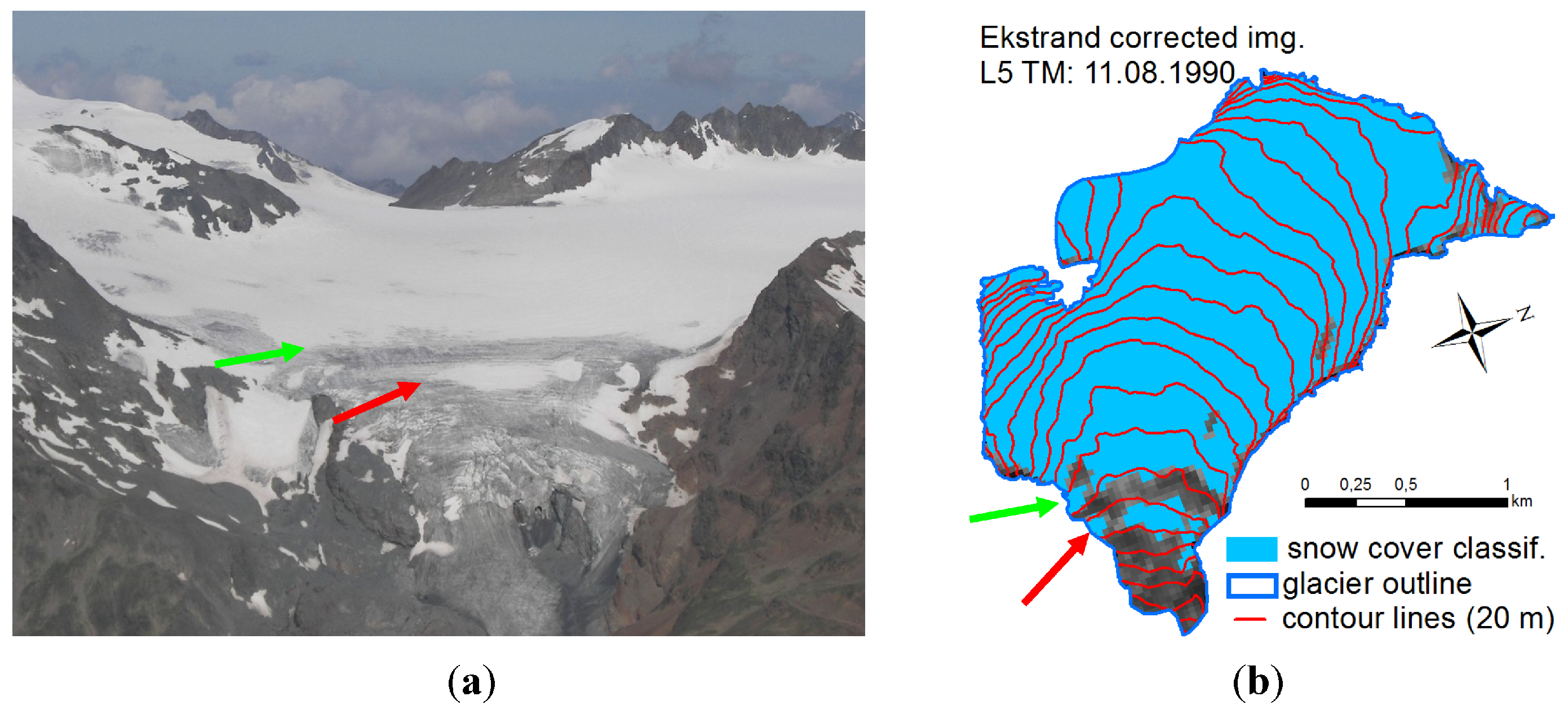
- We then used the elevation bins and intersected them with the snow cover map (Figure 5) using the same methodology as [17]. Each of the bins, starting from the lowest elevation to the highest, contains a different ratio of snow pixels; a bin with a ratio of snow-covered pixels higher than 50% is tagged as a snow bin. However, for each glacier, the snow bin with the highest number of consecutive snow bins above it is tagged as the potential snow line. Ref. [17] chose the lowest bin, accumulating at least five bins with a majority of snow above it. Then, depending on the result of the algorithm (pass or fail), Ref. [17] decreased the necessary consecutive snowy bins by one up to three bins and then chose the one with the lowest elevation.
- Snow line initialization. Given DEM inaccuracies [19], but also given the high slopes present within a glacier, mapping on a DEM given a particular elevation range often results in a spatially irregular and discontinuous line or area over the glacier. This only allows a poorly designed initialization line for active contour methods, which then impacts the performance of the said active contour method [42,43]. In this processing step, we propose to simplify the result of the bin decomposition by a polynomial regression [44] of its result. This operation works under the assumption that a glacier has an inclined gutter shape, i.e., the concavity of the contour lines in the upper reaches of the glaciers is upstream [8]. It means that if we select the equipotential of a glacier, hence the intersection of this gutter with a plane, we will likely obtain a simple polynomial curve, where its maximum or minimum is located on the decreasing axis. Hence, such a polynomial curve can be approximated by a low-order polynomial fitted to the bins’ decomposition results. However, the spatial orientation of such a curve will depend on the glacier orientation. Given x and y the columns and the line of the study area image, and depending on the main orientation of the glacier, we need to approximate with a polynomial function the x coordinates given y of the bin, or the y coordinates given x of the bin (Figure 6). Finally, we introduce a range of altitude () of ±20 m (depending on the size of the glacier, we allow this range of altitude to go up to ±100 m if not enough pixels are available; if the polynomial fit still lacks data, we reduce the polynomial order of the approximation up to 2 degrees.) around the selected elevation to map more pixels on the glacier in order to reduce instabilities during the fitting of the polynomialWe then have, with the initialized bin,We are then able to provide two possible polynomial regressions:Depending on the R score of the computed approximations, we can choose the one that achieves the best R score over the selected bins:Depending on the result of the approximations, the best approximation (meaning the one with the lowest R score) is selected as the final snow line.
- Active contour method. The ASMAG algorithm was developed under the assertion that the snow line, as an area, is an equipotential [17], but sometimes, winds, avalanches or shadows force the snow line to have a different elevation depending on its position within the glacier [13,41]. To overcome this issue, we propose to implement an active contour detection [45] initialized by the best polynomial interpolation of the potential snow line (Figure 7).
3.5.2. No Bin’s Approach
- Closing operation. In order to remove the snow patches in the ice-exposed area of a glacier, we intend to apply a binary morphological closing [46,47] on the binary snow map where B is a structuring element. The goal of this operation is to simplify the ice and snow cover map in order to have a less noisy gradient.
- Gradient computing. As the result of the closing operation is still a binary map, we implement a local gradient computation, Figure 8, which returns the local gradient of an image (i.e., local maximum–local minimum) given a footprint, which defines the local neighborhood around the pixel used for the computation in order to detect the interfaces between ice and snow [47,48].
4. Results
4.1. Pre-Processing
- The shadow classification step to detect and discard the shadowed pixels within the glacier;
- The glacier classification step to detect ice and snow pixels compared to potential foreground pixels that are no longer covered by the glacier but still present in the 2015 glacier inventory shape file [20].
4.2. Snow and Ice Detection
- There are only two types of classes to detect, ice and snow, with no regards to other characteristics.
- To limit experimental errors within the labeling process, only obvious snow and ice pixel were selected as training samples, meaning that snow and ice pixels near snow lines are not present within the training and evaluation data set.
4.3. Snow Line Detection
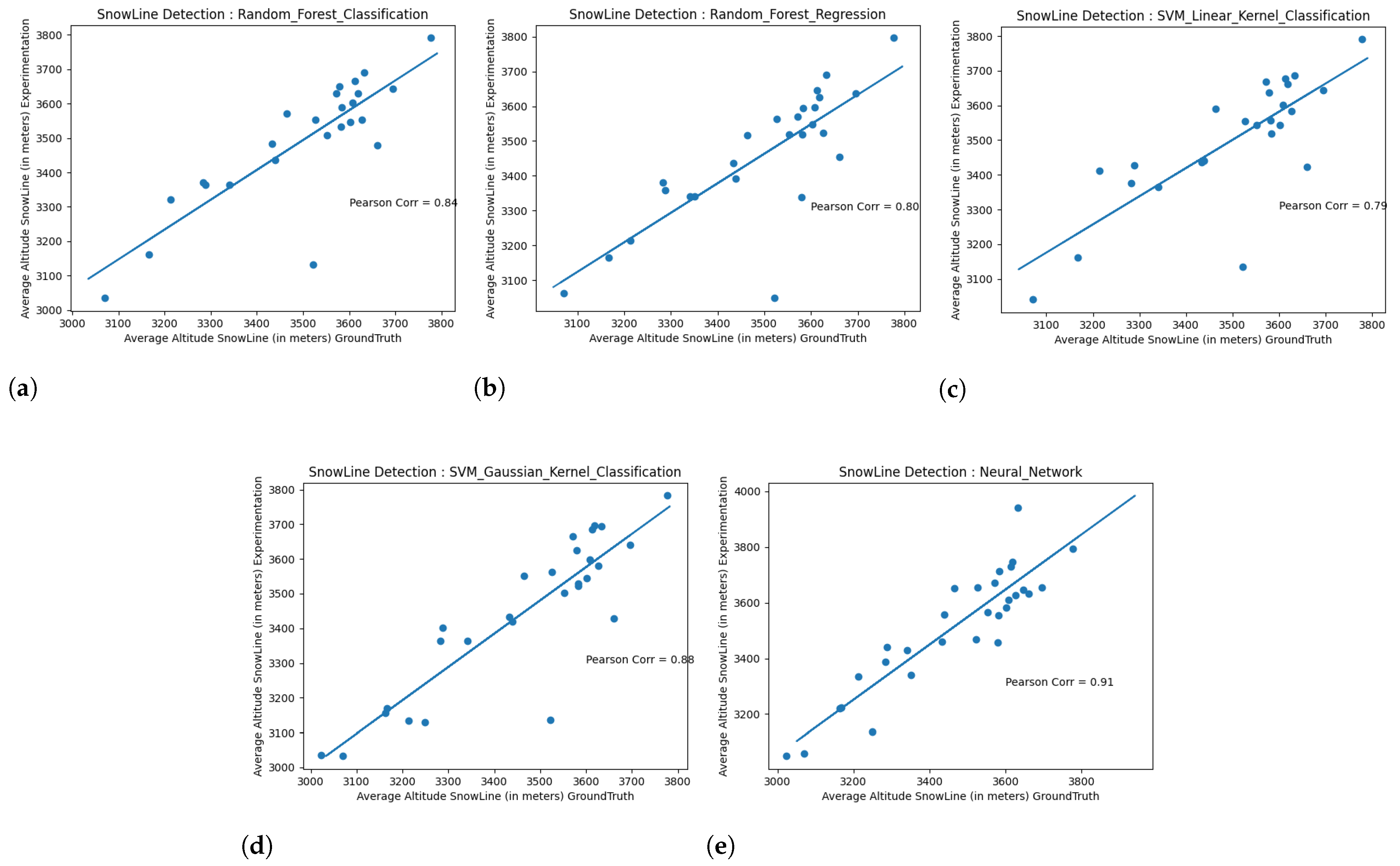
- We compute the snow line using the different methods presented in the Method section.
- We embed the resulted snow lines on the Copernicus DEM, and compute their average elevation for each glacier using the outlines of the 2015 glacier inventory [20].
- We compute the Pearson’s correlation coefficient [51] of the average computed snow line elevation and the average ground truth snow line elevation per glacier.
4.4. Outliers Removal
- Glaciers whose complex shapes and chaotic topographic conditions do not allow a clear definition of a snow line with regard to a simple elevation line. In general, such glaciers are not indicated by the glaciers inventory [20] and reject the hypothesis of a glacier to have a monotonic elevation topography or a single applicable snow line over the entire glacier. Such glaciers were removed from our study. Figure 13 shows an example of such glaciers.
- Glaciers which contain a chaotic snow line area that sometimes extends over several hundred of meters height. For such cases, one would detect the snow line at the bottom of the this area, or would detect it above. Because of such a chaotic situation, the result between different models can highly differ, as their output can be significantly different upon pixels, referring to an area that contains an equal amount of ice and snow. As, within such a context, it appears improbable to propose a reliable ground truth, we chose to discard these glaciers in our study. Figure 14 shows an example of such glaciers.
5. Discussion
5.1. Potential Enhancement of the Study
5.2. Extension of Our Work to Other Multi-Spectral Images
5.3. From a Proof of Concept to a Finalized Product
- Automatize the entire processing chain (from the images download on the satellite data providers platforms to the distribution of the finalized products);
- Quantify and document all uncertainties, so that the end-user is confident that the product has gone through a quality control;
- Make the product available (open interface for data distribution), in a reusable and interoperable format, and when possible in real time.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pörtner, H.O.; Roberts, D.C.; Masson-Delmotte, V.; Zhai, P.; Tignor, M.; Poloczanska, E.; Weyer, N. The ocean and cryosphere in a changing climate. In Special Report on the Ocean and Cryosphere in a Changing Climate; IPCC: Geneva, Switzerland, 2019. [Google Scholar]
- Østrem, G.; Stanley, A.; Subdivision, R.G.; Saskatoon: National Hydrological Research Institut. Glacier mass-balance measurements: A manual for field and office work. Arct. Alp. Res. 1993, 25, 77–78. [Google Scholar] [CrossRef]
- Kaser, G.; Fountain, A.; Jansson, P. A Manual for Monitoring the Mass Balance of Mountain Glaciers; Unesco: Paris, France, 2003; Volume 137. [Google Scholar]
- Jacob, T.; Wahr, J.; Pfeffer, W.T.; Swenson, S. Recent contributions of glaciers and ice caps to sea level rise. Nature 2012, 482, 514–518. [Google Scholar] [CrossRef]
- Gardner, A.S.; Moholdt, G.; Cogley, J.G.; Wouters, B.; Arendt, A.A.; Wahr, J.; Berthier, E.; Hock, R.; Pfeffer, W.T.; Kaser, G. A reconciled estimate of glacier contributions to sea level rise: 2003 to 2009. Science 2013, 340, 852–857. [Google Scholar] [CrossRef]
- Howat, I.M.; Smith, B.E.; Joughin, I.; Scambos, T.A. Rates of southeast Greenland ice volume loss from combined ICESat and ASTER observations. Geophys. Res. Lett. 2008, 35, L17505. [Google Scholar] [CrossRef]
- Menounos, B.; Hugonnet, R.; Shean, D.; Gardner, A.; Howat, I.; Berthier, E.; Pelto, B.; Tennant, C.; Shea, J.; Noh, M.J.; et al. Heterogeneous Changes in Western North American Glaciers Linked to Decadal Variability in Zonal Wind Strength. Geophys. Res. Lett. 2018, 46, 200–209. [Google Scholar] [CrossRef]
- Bahr, D.B.; Meier, M.F.; Peckham, S.D. The physical basis of glacier volume-area scaling. J. Geophys. Res. Solid Earth 1997, 102, 20355–20362. [Google Scholar] [CrossRef]
- Drolon, V.; Maisongrande, P.; Berthier, E.; Swinnen, E.; Huss, M. Monitoring of seasonal glacier mass balance over the European Alps using low-resolution optical satellite images. J. Glaciol. 2016, 62, 912–927. [Google Scholar] [CrossRef]
- Rabatel, A.; Sirguey, P.; Drolon, V.; Maisongrande, P.; Arnaud, Y.; Berthier, E.; Davaze, L.; Dedieu, J.P.; Dumont, M. Annual and Seasonal Glacier-Wide Surface Mass Balance Quantified from Changes in Glacier Surface State: A Review on Existing Methods Using Optical Satellite Imagery. Remote Sens. 2017, 9, 507. [Google Scholar] [CrossRef]
- Braithwaite, R.J. Can the Mass Balance of a Glacier be Estimated from its Equilibrium-Line Altitude? J. Glaciol. 1984, 30, 364–368. [Google Scholar] [CrossRef]
- Benn, D.I.; Lehmkuhl, F. Mass balance and equilibrium-line altitudes of glaciers in high-mountain environments. Quat. Int. 2000, 65-66, 15–29. [Google Scholar] [CrossRef]
- Rabatel, A.; Dedieu, J.P.; Vincent, C. Using remote-sensing data to determine equilibrium-line altitude and mass-balance time series: Validation on three French glaciers, 1994–2002. J. Glaciol. 2005, 51, 539–546. [Google Scholar] [CrossRef]
- Paterson, W.S.B. Physics of Glaciers; Butterworth-Heinemann: Oxford, UK, 1994. [Google Scholar]
- Lliboutry, L. Traité de Glaciologie. Tome 2. Glaciers, Variations du Climat, Sols Gelés; Masson: Paris, France, 1965. [Google Scholar]
- Davaze, L.; Rabatel, A.; Rabatel, A.; Hugonnet, R.; Arnaud, Y. Region-Wide Annual Glacier Surface Mass Balance for the European Alps From 2000 to 2016. Front. Earth Sci. 2020, 8, 149. [Google Scholar] [CrossRef]
- Rastner, P.; Prinz, R.; Notarnicola, C.; Nicholson, L.; Sailer, R.; Schwaizer, G.; Paul, F. On the Automated Mapping of Snow Cover on Glaciers and Calculation of Snow Line Altitudes from Multi-Temporal Landsat Data. Remote Sens. 2019, 11, 1410. [Google Scholar] [CrossRef]
- Racoviteanu, A.E.; Rittger, K.; Armstrong, R. An Automated Approach for Estimating Snowline Altitudes in the Karakoram and Eastern Himalaya From Remote Sensing. Front. Earth Sci. 2019, 7, 220. [Google Scholar] [CrossRef]
- Fahrland, E.; Jacob, P.; Schrader, H.; Kahabka, H. Copernicus Digital Elevation Model, Product Handbook; Airbus Defence and Space—Intelligence: Potsdam, Germany, 2020. [Google Scholar]
- Paul, F.; Rastner, P.; Azzoni, R.S.; Diolaiuti, G.; Fugazza, D.; Le Bris, R.; Nemec, J.; Rabatel, A.; Ramusovic, M.; Schwaizer, G.; et al. Glacier inventory of the Alps from Sentinel-2, shape files. Supplement to: Paul, F.; Rastner, P., R.; Azzoni, R.S.; Diolaiuti, G.; Fugazza, D.; Le Bris, R.; Nemec, J.; Rabatel, A.; Ramusovic, M.; Schwaizer, G.; Smiraglia, C.: Glacier shrinkage in the Alps continues unabated as revealed by a new glacier inventory from Sentinel-2. Earth Syst. Sci. Data 2020, 12, 1805–1821. [Google Scholar] [CrossRef]
- Ihlen, V.L.; Zanter, K. Landsat 8 (L8) Data Users Handbook; Data Users Handbook Version 5.0; Department of the Interior, U.S. Geological Survey: Sioux Falls, SD, USA, 2019.
- Rizzoli, P.; Martone, M.; Gonzalez, C.; Wecklich, C.; Borla Tridon, D.; Bräutigam, B.; Bachmann, M.; Schulze, D.; Fritz, T.; Huber, M.; et al. Generation and performance assessment of the global TanDEM-X digital elevation model. ISPRS J. Photogramm. Remote Sens. 2017, 132, 119–139. [Google Scholar] [CrossRef]
- Zwally, H.J.; Schutz, B.; Bentley, C. GLAS/ICESat L2 Global Land Surface Altimetry Data, Version 34, 2014. Type: Dataset. Available online: https://nsidc.org/data/gla14/versions/34 (accessed on 3 March 2021).
- Rastner, P.; Bolch, T.; Notarnicola, C.; Paul, F. A Comparison of Pixel- and Object-Based Glacier Classification With Optical Satellite Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 853–862. [Google Scholar] [CrossRef]
- Rabatel, A.; Letréguilly, A.; Dedieu, J.P.; Eckert, N. Changes in glacier equilibrium-line altitude in the western Alps from 1984 to 2010: Evaluation by remote sensing and modeling of the morpho-topographic and climate controls. Cryosphere 2013, 7, 1455–1471. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Joseph Hughes, M.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Qiu, S.; Zhu, Z.; He, B. Fmask 4.0: Improved cloud and cloud shadow detection in Landsats 4–8 and Sentinel-2 imagery. Remote Sens. Environ. 2019, 231, 111205. [Google Scholar] [CrossRef]
- Mahajan, S.; Fataniya, B. Cloud detection methodologies: Variants and development—A review. Complex Intell. Syst. 2020, 6, 251–261. [Google Scholar] [CrossRef]
- Nolin, A.W.; Dozier, J.; Mertes, L.A.K. Mapping alpine snow using a spectral mixture modeling technique. Ann. Glaciol. 1993, 17, 121–124. [Google Scholar] [CrossRef]
- Sheng, T.; Chen, Q. Dark Channel Prior-Based Altitude Extraction Method for a Single Mountain Remote Sensing Image. IEEE Geosci. Remote. Sens. Lett. 2017, 14, 132–136. [Google Scholar] [CrossRef]
- Tolt, G.; Shimoni, M.; Ahlberg, J. A shadow detection method for remote sensing images using VHR hyperspectral and LIDAR data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 4423–4426. [Google Scholar] [CrossRef]
- Khan, A.A.; Jamil, A.; Hussain, D.; Taj, M.; Jabeen, G.; Malik, M.K. Machine-Learning Algorithms for Mapping Debris-Covered Glaciers: The Hunza Basin Case Study. IEEE Access 2020, 8, 12725–12734. [Google Scholar] [CrossRef]
- Callegari, M.; Marin, C.; Notarnicola, C. Multi-temporal and multi-source alpine glacier cover classification. In Proceedings of the 2017 9th International Workshop on the Analysis of Multitemporal Remote Sensing Images (MultiTemp), Brugge, Belgium, 27–29 June 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Raza, I.U.R.; Kazmi, S.S.A.; Ali, S.S.; Hussain, E. Comparison of Pixel-based and Object-based classification for glacier change detection. In Proceedings of the 2012 Second International Workshop on Earth Observation and Remote Sensing Applications, Shanghai, China, 8–11 June 2012; pp. 259–262. [Google Scholar] [CrossRef]
- Wang, X.; Gao, X.; Zhang, X.; Wang, W.; Yang, F. An Automated Method for Surface Ice/Snow Mapping Based on Objects and Pixels from Landsat Imagery in a Mountainous Region. Remote Sens. 2020, 12, 485. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Zhang, J.; Jia, L.; Menenti, M.; Hu, G. Glacier Facies Mapping Using a Machine-Learning Algorithm: The Parlung Zangbo Basin Case Study. Remote Sens. 2019, 11, 452. [Google Scholar] [CrossRef]
- Alifu, H.; Vuillaume, J.F.; Johnson, B.A.; Hirabayashi, Y. Machine-learning classification of debris-covered glaciers using a combination of Sentinel-1/-2 (SAR/optical), Landsat 8 (thermal) and digital elevation data. Geomorphology 2020, 369, 107365. [Google Scholar] [CrossRef]
- Paul, F.; Huggel, C.; Kääb, A. Combining satellite multispectral image data and a digital elevation model for mapping debris-covered glaciers. Remote Sens. Environ. 2004, 89, 510–518. [Google Scholar] [CrossRef]
- World Meteorological Office. Seasonal Snow Cover, 1970. Available online: https://gcw.met.no/node/6 (accessed on 3 March 2021).
- Rodtook, A.; Kirimasthong, K.; Lohitvisate, W.; Makhanov, S.S. Automatic initialization of active contours and level set method in ultrasound images of breast abnormalities. Pattern Recognit. 2018, 79, 172–182. [Google Scholar] [CrossRef]
- Keatmanee, C.; Makhanov, S.S.; Kotani, K.; Lohitvisate, W.; Thongvigitmanee, S.S. Automatic initialization for active contour model in breast cancer detection utilizing conventional ultrasound and Color Doppler. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Korea, 11–15 July 2017; pp. 3248–3251. [Google Scholar] [CrossRef]
- Ostertagová, E. Modelling using Polynomial Regression. Procedia Eng. 2012, 48, 500–506. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 532–550. [Google Scholar] [CrossRef]
- Vincent, L. Grayscale area openings and closings, their efficient implementation and applications. In Proceedings of the EURASIP Workshop on Mathematical Morphology and Its Applications to Signal Processing, Barcelona, Spain, May 1993. [Google Scholar]
- Huang, T.; Yang, G.; Tang, G. A fast two-dimensional median filtering algorithm. IEEE Trans. Acoust. Speech, Signal Process. 1979, 27, 13–18. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man, Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote. Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Pearson’s Correlation Coefficient. In Encyclopedia of Public Health; Kirch, W. (Ed.) Springer: Dordrecht, The Netherlands, 2008; pp. 1090–1091. [Google Scholar] [CrossRef]
- Mernild, S.H.; Pelto, M.; Malmros, J.K.; Yde, J.C.; Knudsen, N.T.; Hanna, E. Identification of snow ablation rate, ELA, AAR and net mass balance using transient snowline variations on two Arctic glaciers. J. Glaciol. 2013, 59, 649–659. [Google Scholar] [CrossRef]
- Barandun, M.; Huss, M.; Usubaliev, R.; Azisov, E.; Berthier, E.; Kääb, A.; Bolch, T.; Hoelzle, M. Multi-decadal mass balance series of three Kyrgyz glaciers inferred from modelling constrained with repeated snow line observations. Cryosphere 2018, 12, 1899–1919. [Google Scholar] [CrossRef]
- Landmann, J.M.; Künsch, H.R.; Huss, M.; Ogier, C.; Kalisch, M.; Farinotti, D. Assimilating near-real-time mass balance stake readings into a model ensemble using a particle filter. Cryosphere 2021, 15, 5017–5040. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name and Resolution (m) | Spectral Range m | Band Number |
|---|---|---|
| Coastal/Aerosol (30 m) | 0.435–0.451 | Band 1 |
| Blue (30 m) | 0.452–0.512 | Band 2 |
| Green (30 m) | 0.533–0.590 | Band 3 |
| Red (30 m) | 0.636–0.673 | Band 4 |
| Near InfraRed (NIR) (30 m) | 0.851–0.879 | Band 5 |
| Short Wave InfraRed 1 (SWIR 1) (30 m) | 1.566–1.651 | Band 6 |
| SWIR 2 (30 m) | 2.107–2.294 | Band 7 |
| Panchromatic (15 m) | 0.503–0.676 | Band 8 |
| Cirrus (30 m) | 1.363–1.384 | Band 9 |
| Long InfraRed 1 (100 m) | 10.60–11.19 | Band 10 |
| Long InfraRed 2 (100 m) | 11.50–12.51 | Band 11 |
| Detection Task | Size (in Pixels) | Expert Verification |
|---|---|---|
| Ice and snow extraction | 270,000 | Yes |
| Glacier extraction | 200,000 | Yes |
| Mountain shadow extraction | 140,000 | Yes |
| Acquisition Date | Path | Row |
|---|---|---|
| 28 September 2014 | 195 | 28 |
| 28 September 2014 | 195 | 29 |
| 5 September 2020 | 194 | 28 |
| 24 November 2020 | 194 | 28 |
| Model | F1-Score | Accuracy (in %) |
|---|---|---|
| Feed forward neural network | 0.98 | 98.0 |
| SVM linear kernel | 0.98 | 98.7 |
| SVM Gaussian kernel | 0.99 | 99.0 |
| Random forest | 1 | 99.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prieur, C.; Rabatel, A.; Thomas, J.-B.; Farup, I.; Chanussot, J. Machine Learning Approaches to Automatically Detect Glacier Snow Lines on Multi-Spectral Satellite Images. Remote Sens. 2022, 14, 3868. https://doi.org/10.3390/rs14163868
Prieur C, Rabatel A, Thomas J-B, Farup I, Chanussot J. Machine Learning Approaches to Automatically Detect Glacier Snow Lines on Multi-Spectral Satellite Images. Remote Sensing. 2022; 14(16):3868. https://doi.org/10.3390/rs14163868
Chicago/Turabian StylePrieur, Colin, Antoine Rabatel, Jean-Baptiste Thomas, Ivar Farup, and Jocelyn Chanussot. 2022. "Machine Learning Approaches to Automatically Detect Glacier Snow Lines on Multi-Spectral Satellite Images" Remote Sensing 14, no. 16: 3868. https://doi.org/10.3390/rs14163868
APA StylePrieur, C., Rabatel, A., Thomas, J.-B., Farup, I., & Chanussot, J. (2022). Machine Learning Approaches to Automatically Detect Glacier Snow Lines on Multi-Spectral Satellite Images. Remote Sensing, 14(16), 3868. https://doi.org/10.3390/rs14163868