1. Introduction
Arctic environments are particularly sensitive to global warming, given that temperatures in the Arctic rise more than twice as rapidly compared to the global average [
1]. This phenomenon is commonly labeled as Arctic amplification [
2]. As a result, drastic changes can be observed everywhere in high-latitude regions. A widespread component of the Arctic, and one that is also heavily affected by climate change, is permafrost. More than 65% of the exposed land above 60°N and roughly one quarter of the total terrestrial area in the Northern Hemisphere is underlain by such permafrost [
3,
4]. It is defined as ground material that remains continuously frozen for two or more consecutive years [
5]. However, the thermal state and distribution of the mentioned frozen ground are heavily impaired by the increase in ground temperature, which is reported for most regions across the permafrost domain [
6,
7,
8].
The steadily deteriorating state of permafrost is reflected through the increasing erosion rates of Arctic coastlines during the last decades [
9,
10]. The average erosion rates have hereby more than doubled for unlithified coasts within the permafrost domain of Siberia, Canada, and Alaska since the early 2000s compared to the late twentieth century [
11]. The amplified erosion rates of permafrost coasts depend not only on the warming permafrost itself but also on other environmental factors and the interplay between them [
9,
12]. These factors include rising sea and air temperatures, higher storm frequencies, the increased duration of the open-water period, and the decreased extent of sea ice, amongst others [
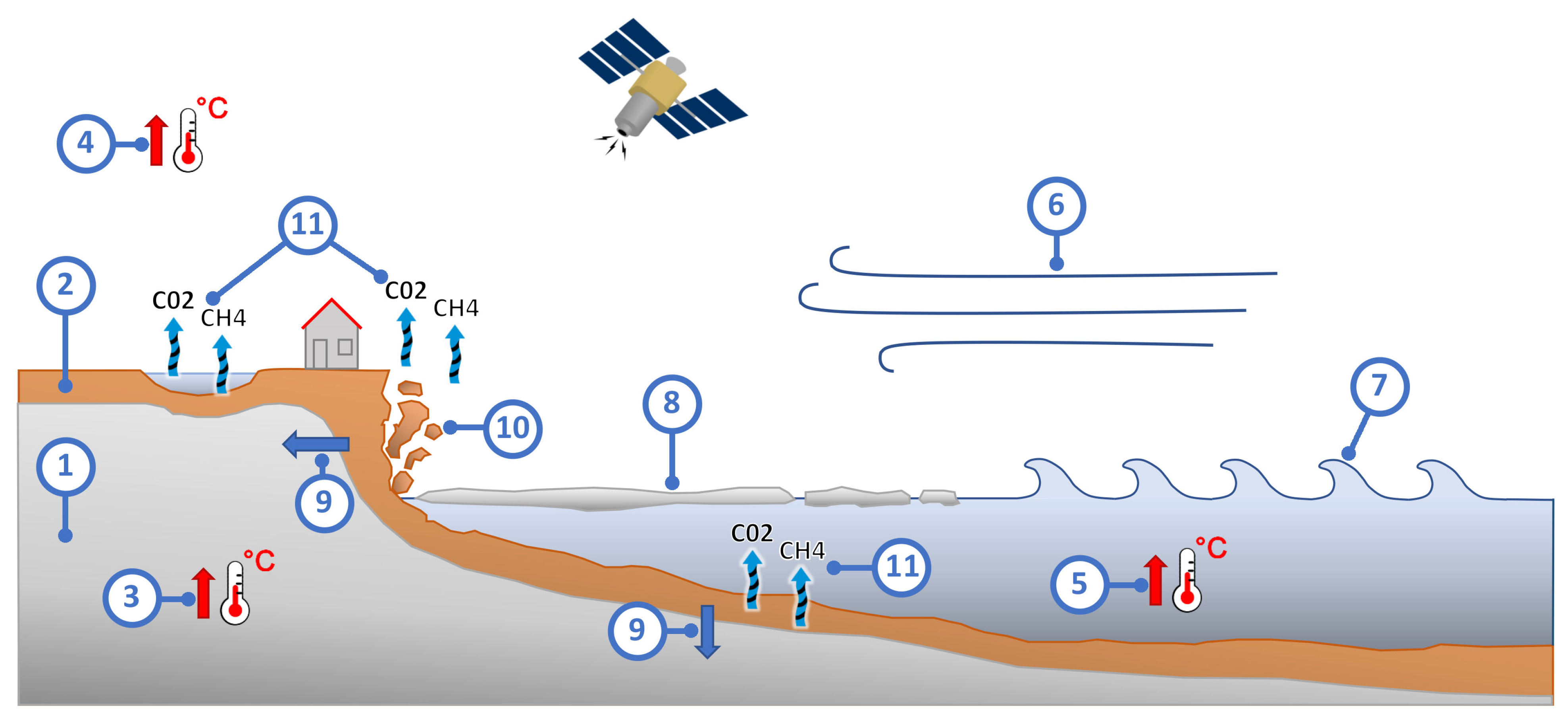
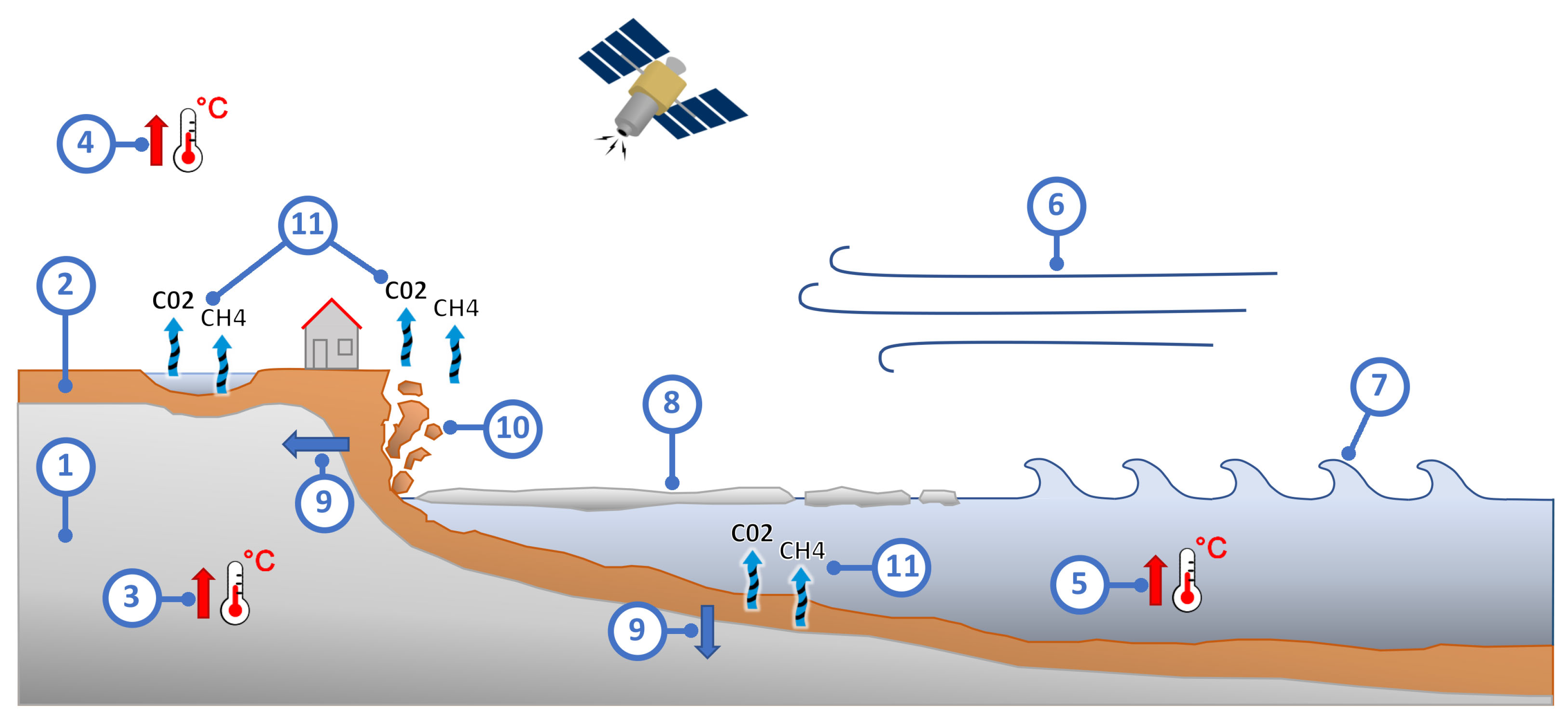
13]. A variety of processes and features connected to the increased erosion rates of the Arctic permafrost coasts are visualized in
Figure 1. As a result, drastic changes in Arctic coastal environments can be observed. Eroding permafrost coastlines force changes in fish and wildlife habitats [
12,
14] and endanger human infrastructure and settlements [
15,
16]. Moreover, organic carbon content that was previously stored in the frozen masses of permafrost soils is released into the oceans [
12,
17]. According to current estimates, permafrost stores between 1460 and 1700 billion tonnes of organic material, a figure twice as large as the total amount of carbon in the atmosphere [
7,
18,
19]. The carbon release from coastal erosion alone is hereby expected to increase up to 75% by the year 2100 [
20].
Roughly one-third of Earth’s coastlines are influenced by permafrost [
10]. Therefore, it is crucial to have a good understanding of the current state of permafrost coasts and their erosion processes on large to circum-Arctic scales and with high detail in order to identify appropriate mitigation actions. For this purpose, satellite remote sensing is a powerful tool for spatially explicit, inexpensive, fast, and operational observations over large spatial scales and time. Nonetheless, satellite Earth observation analyses in Arctic regions remain challenging due to disadvantageous environmental conditions, such as low light intensities (including polar night), steep sun angles, and frequent cloud coverage [
22,
23]. Especially optical satellite imagery is heavily influenced by these environmental factors, which results in data gaps and therefore strongly limits the usability of this data type within the Arctic domain. Synthetic Aperture RADAR (SAR) data, on the other hand, is largely independent of sun illumination and weather conditions and has therefore the potential to overcome some of the limitations associated with optical imagery [
24,
25]. That said, SAR data also come with challenges in the context of monitoring Arctic coastal erosion frequencies. In a recent study by Bartsch et al. [
26], the applicability of three different wavelengths (X-, C-, and L-band) from three different satellite missions (TerraSAR-X, Sentinel-1 (S1), and ALOS PALSAR 1/2) were investigated for various study sites across the Arctic. While the application of SAR data for coastal erosion analysis was generally considered to be feasible across all wavelengths, the authors stress challenges in the form of ambiguous scattering behavior, issues with viewing geometries, and inconsistencies in data acquisition [
26].
A first attempt at quantifying coastal erosion rates on a pan-Arctic scale was undertaken by Lantuit et al. [
10] in the form of the Arctic Coastal Dynamics (ACD) database. The database provides a geomorphological classification for over 100,000 km of Arctic coastline into 1315 segments with information about, amongst others, the shore form, ground ice content, lithification stage, as well as average erosion rates per segment [
10].
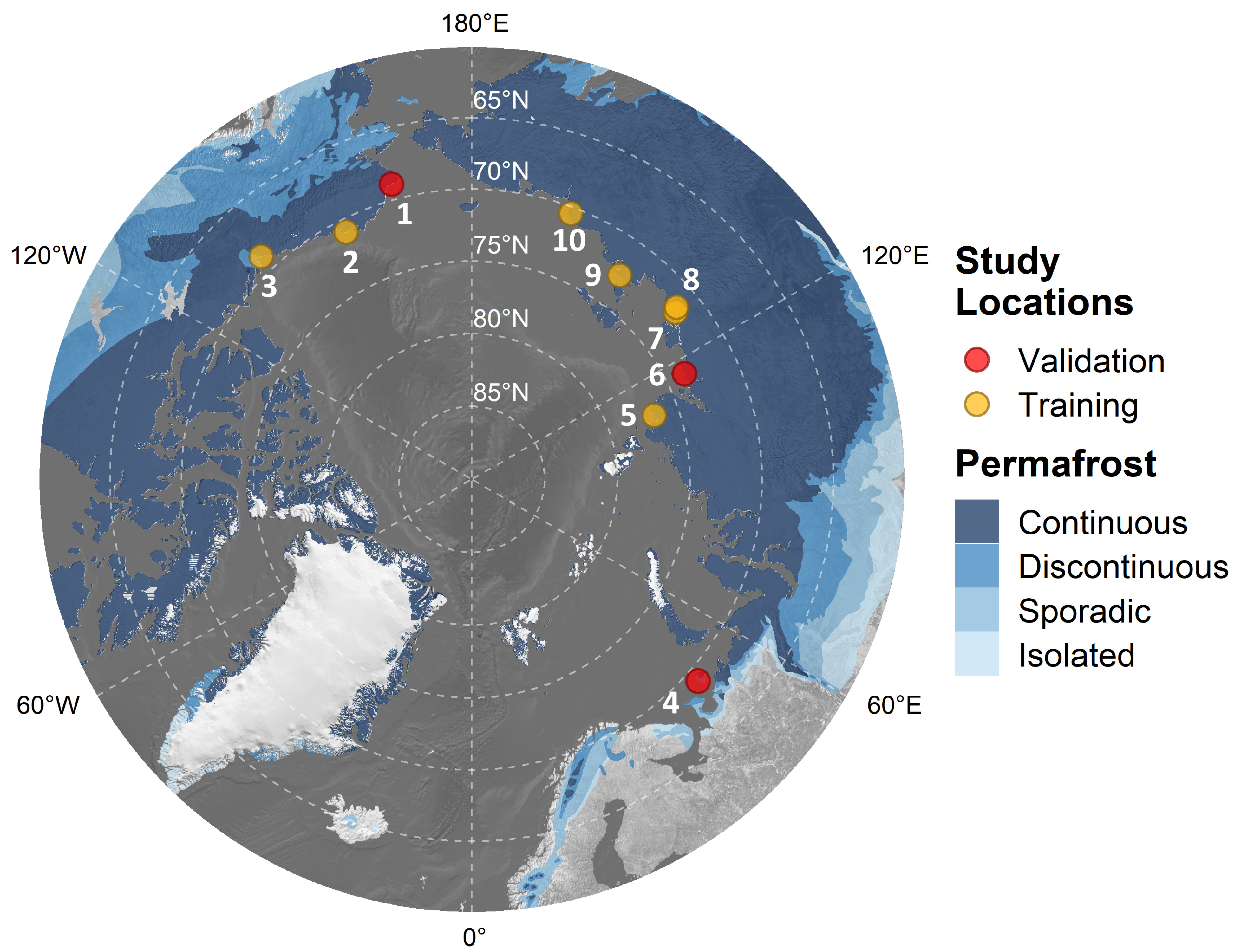
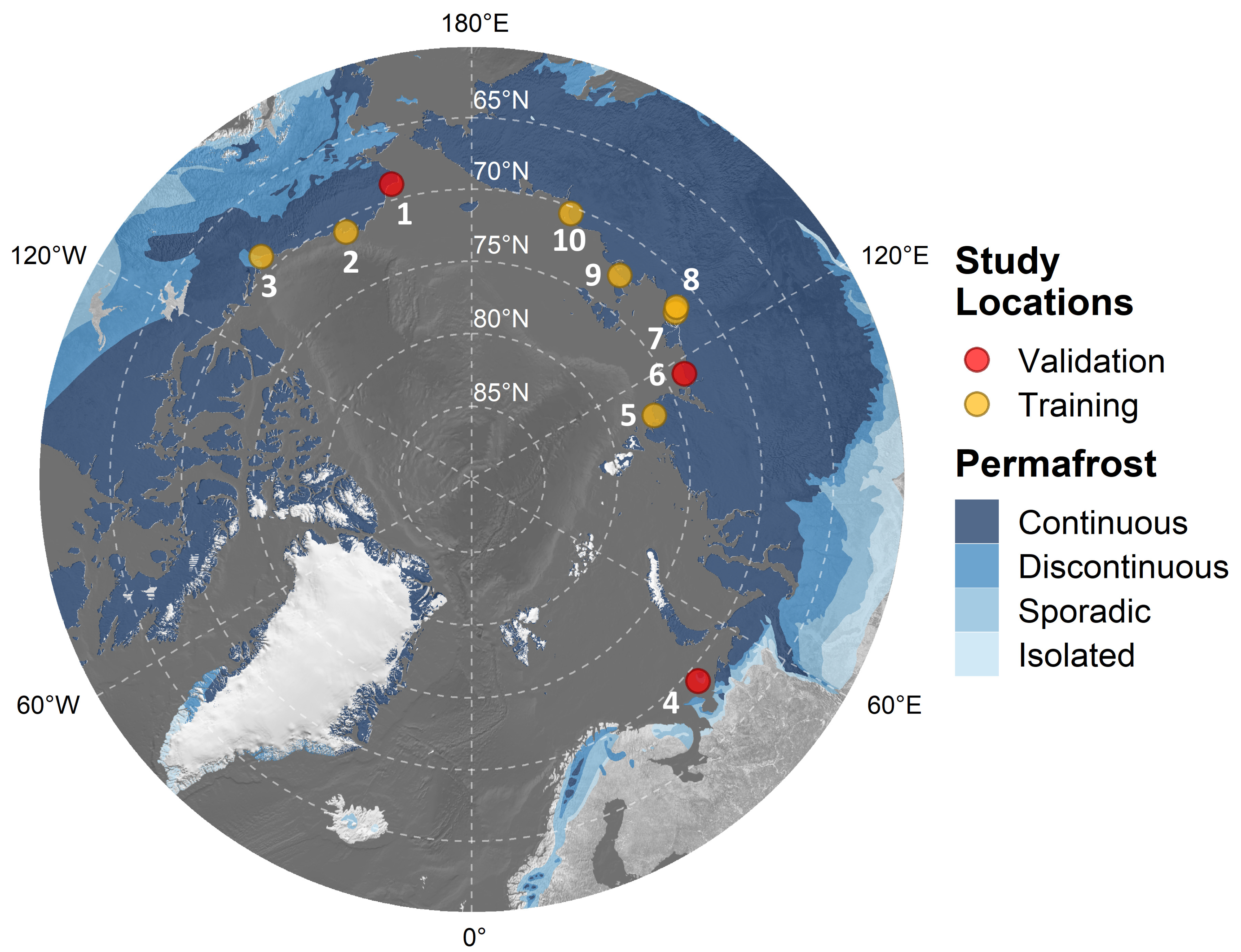
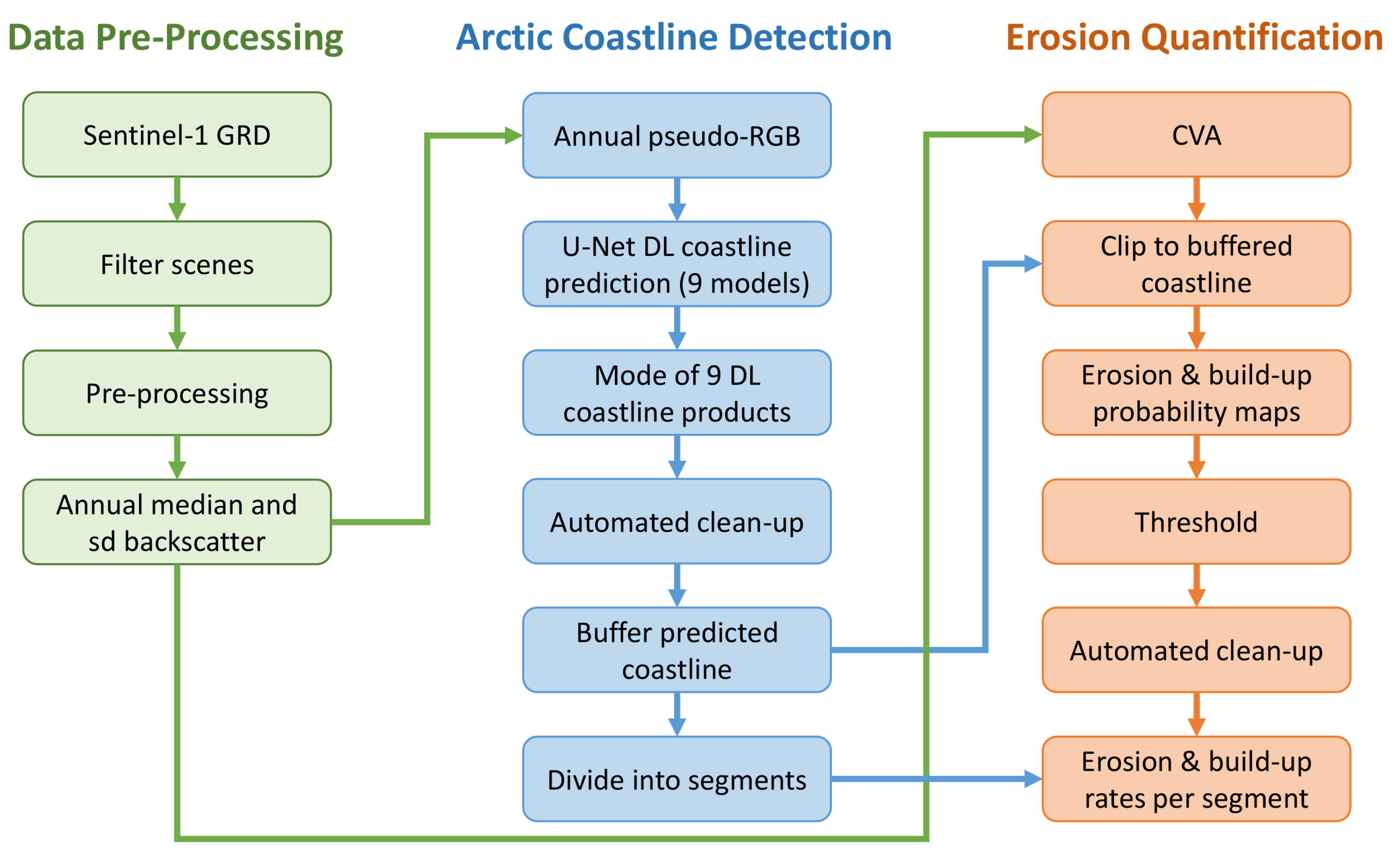
This study aims to explore new methodologies based on SAR satellite remote sensing data to further advance in quantifying Arctic coastal erosion rates with high spatial resolution and on a circum-Arctic scale. As a first step toward achieving this goal, an ongoing, spatio-temporally explicit, and easily reproducible coastal erosion and build-up product was created for ten test sites that are distributed across the Arctic. The annual median and standard deviation (sd) backscatter images derived from S1 and covering a total length of 1038 km of permafrost coastline were hereby generated. Lastly, nine different U-Net architectures were employed to compute a high-quality coastline product, which acted as a reference for the subsequent annual coastal erosion and build-up quantification based on Change Vector Analysis (CVA).
5. Discussion
The degradation of frozen ground material comes with drastic consequences not only for the environment but also for human society. Amplified surface deformation rates [
71,
72,
73,
74], wildfires [
75,
76,
77], thermokarst pond and lake dynamics [
78,
79,
80,
81], coastal erosion [
10,
82,
83], and the release of stored organic carbon content [
84,
85,
86,
87] are hereby just some of the effects associated with thawing permafrost. This study explored the potential of S1 C-Band SAR backscatter data in quantifying annual erosion and build-up rates of Arctic permafrost coasts. Ambiguities in the scattering behavior of individual SAR scenes can impair the applicability of S1 for coastal erosion analysis [
26]. However, by working on annual composites instead of individual images, the amount of noise and speckle could be reduced to a minimum. Moreover, combining images over a period of four months (June–September) minimized the geolocation uncertainty of single observations [
34,
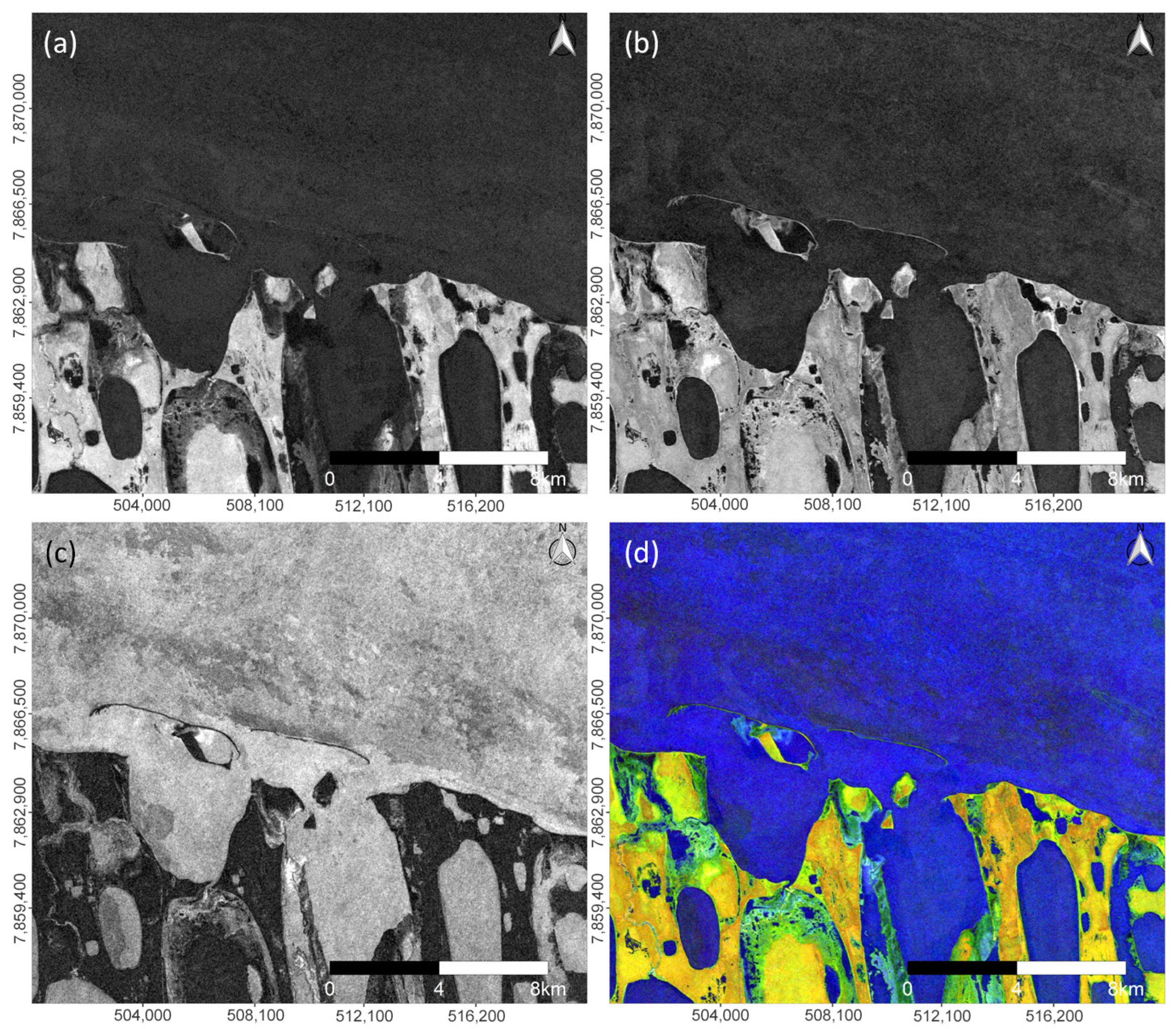
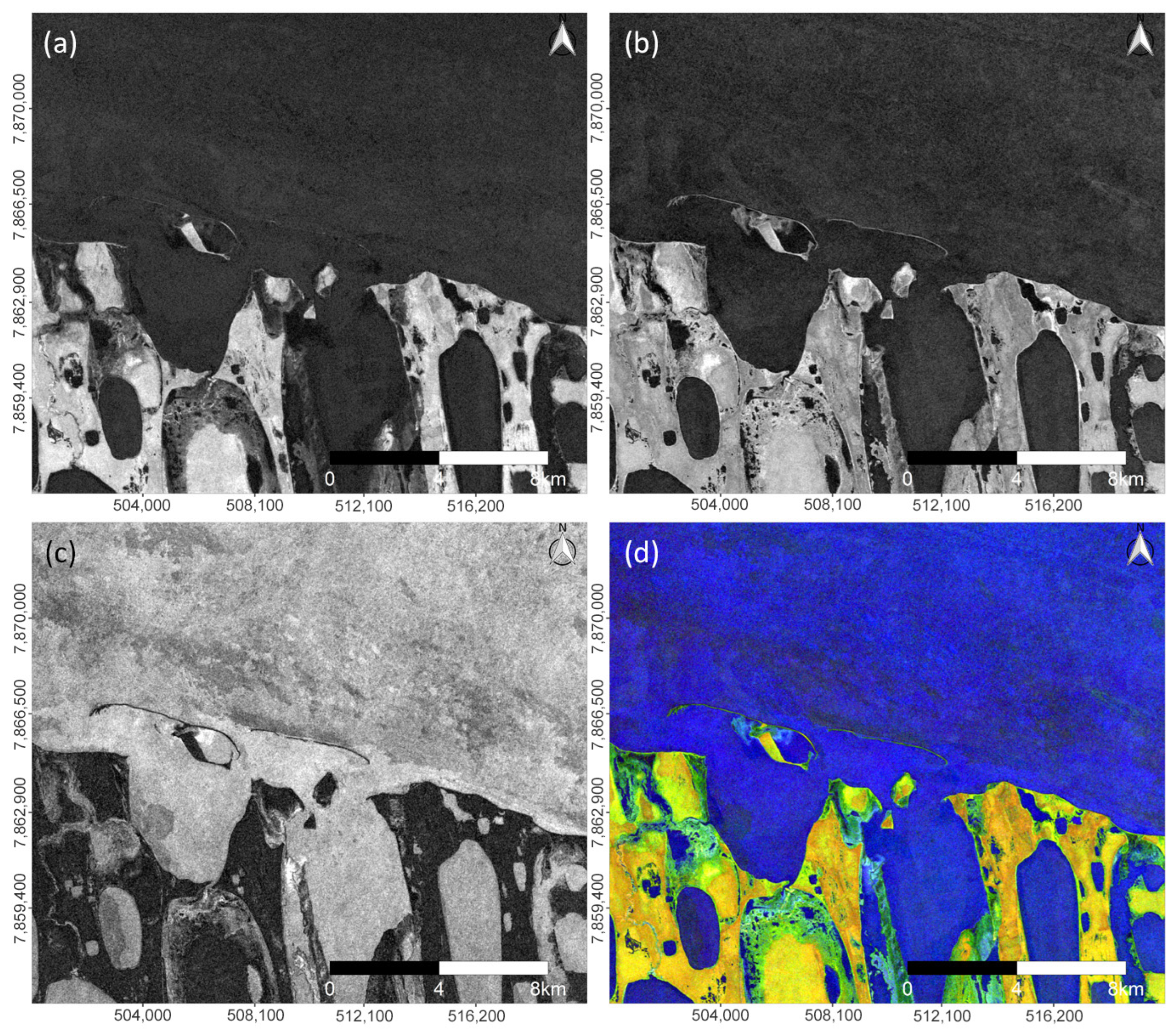
35]. Because this study investigated coastal change on a per-pixel-basis with a nominal spatial resolution of 10 m, reducing the mentioned uncertainty factors is required in order to detect actual change instead of noise. A higher annual median backscatter could be observed over land compared to water, whereas the annual sd backscatter behaved inversely to the median (
Figure 4). In general, water areas tend to feature lower backscatter intensities due to the specular reflection characteristic compared to the rougher terrain, which induces diffuse scattering and therefore higher backscatter values at the present incidence angles [
88,
89]. This is reflected in the lower median intensity over the sea in contrast to terrestrial areas. That said, the sea surface is not perfectly flat but characterized by different wave types. On the one hand, there are wind-driven capillary waves, which rely on surface tension [
89]. On the other hand, gravity waves are generated by gravitational force to counteract wind-induced mass disturbances [
89,
90]. As each SAR observation detects a unique texture of the sea surface as a result of the present waves for a given time, a higher sd in backscatter intensity can be observed for water areas compared to the land areas, which are, for the most part, more stable in their surface roughness across the observed time span (June–September).
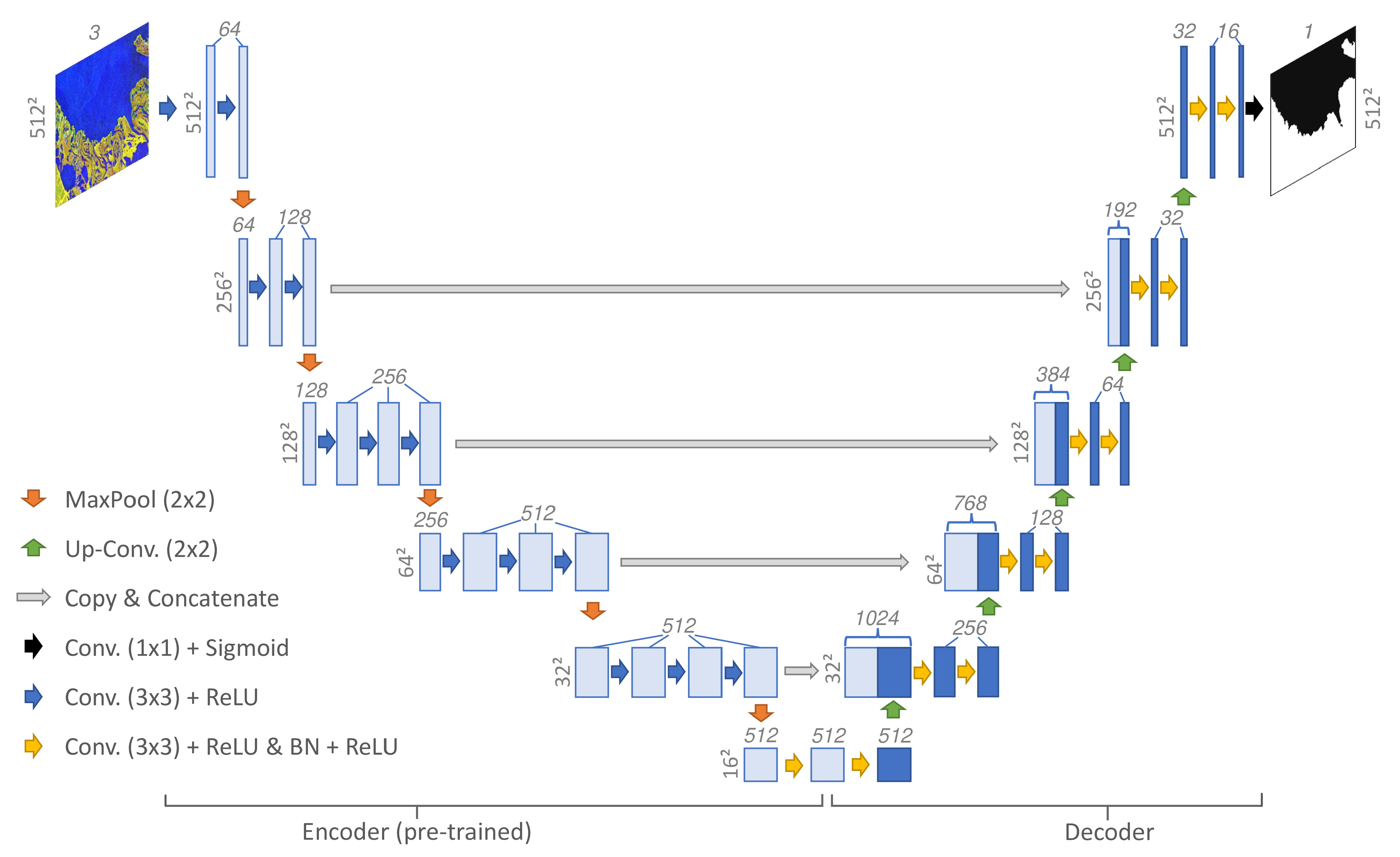
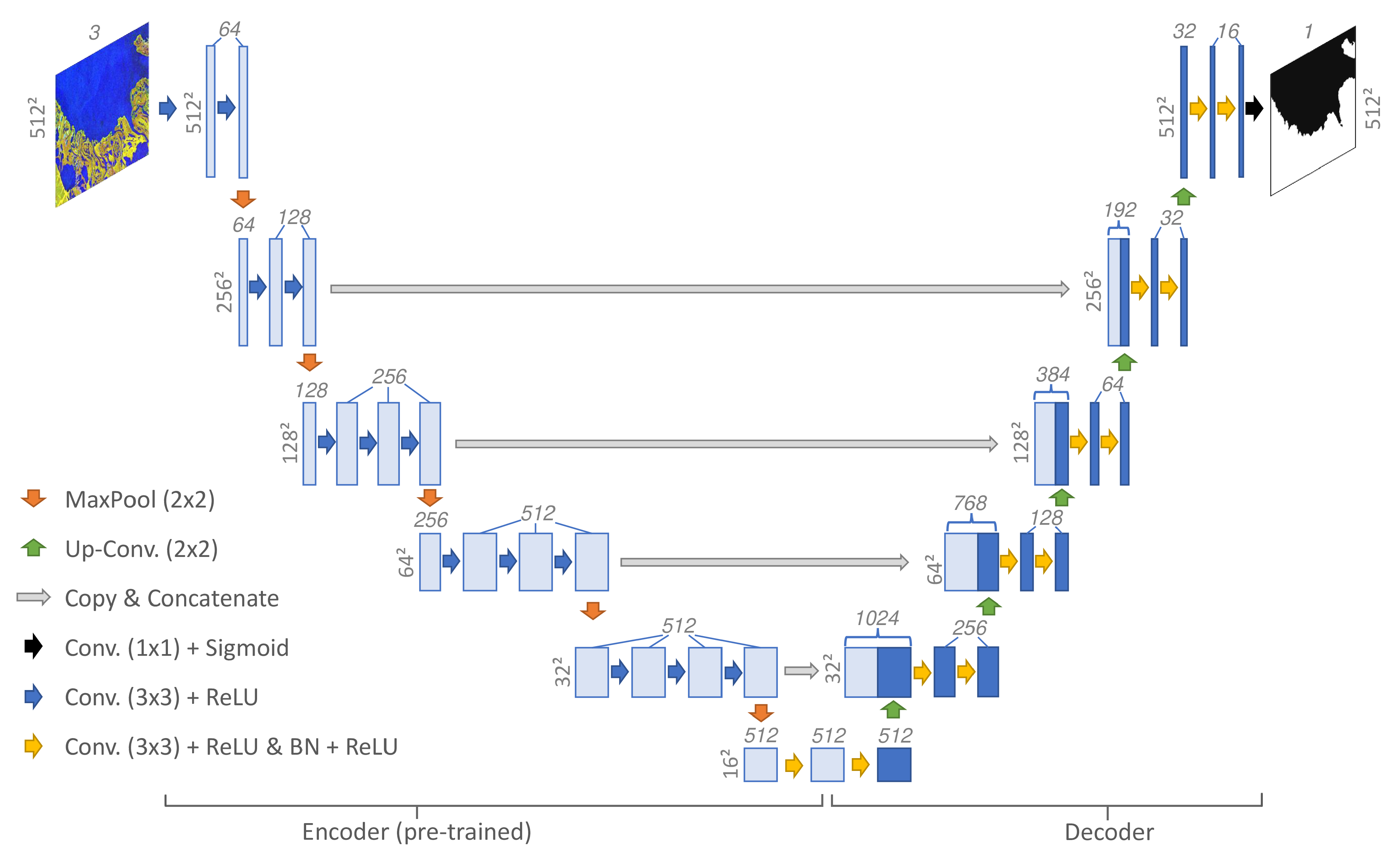
This information could subsequently be used as input data for generating a DL-based coastline product, which acted as a basis for the CVA-derived erosion and build-up rates. CNN-based algorithms have the drawback of requiring large amounts of training data compared to traditional ML approaches [
91]. This limitation could be largely overcome by (1) using pre-trained networks based on the ImageNet database (14 Mio. images) as well as (2) applying augmentation to the additional input images which enabled further training using 32,606 pseudo-RGB SAR scenes. Another limitation is the difficulty in finding the optimal depth of a CNN for a given task [
92]. In comparison to traditional machine learning approaches, which require feature engineering (the selection of relevant features as input data) for the best possible performance [
93], DL identifies the relevant representation of the input data and ignores seemingly irrelevant representations by itself [
94]. However, the choice of a suitable network architecture and depth capable of grasping the complexity of a problem is still essential in order to generate meaningful results [
92]. By combining nine different U-Net networks with varying depths and architecture types, a representative and robust prediction per pixel is provided. As mentioned in a recent review article by Philipp et al. [
95], only a relatively small portion of the reviewed studies explored the potential of DL in the context of permafrost-related investigations, despite its large potential for improving classification accuracies compared to traditional ML approaches. Several successful implementations of DL for the mapping of thaw slumps [
96], ice-wedge polygons [
97,
98], Arctic vegetation [
99], and Arctic settlements [
100] were already published. This study exploited the capabilities of DL and, in particular, of the U-Net architecture for extracting the Arctic coastline with high resolution and accuracy. The successful implementation of the U-Net framework for detecting coastlines based on SAR data in Antarctic environments was hereby already demonstrated in previous works [
40,
41,
42]. In this study, nine different U-Net architectures were employed to generate binary classification maps that differentiate between sea and land area (including inland lakes and rivers). All the U-Net models hereby produced validation accuracies of ≥0.9957 (
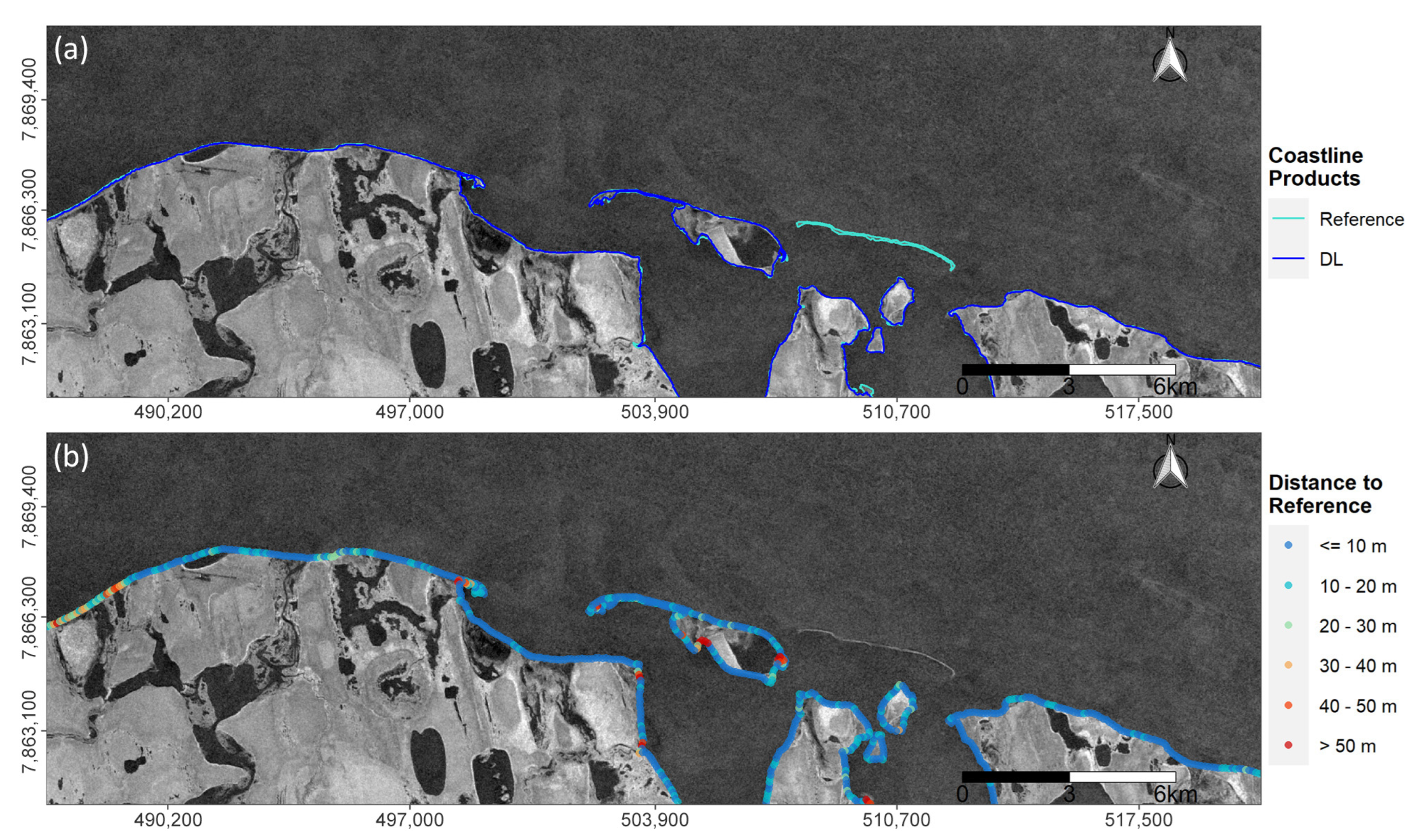
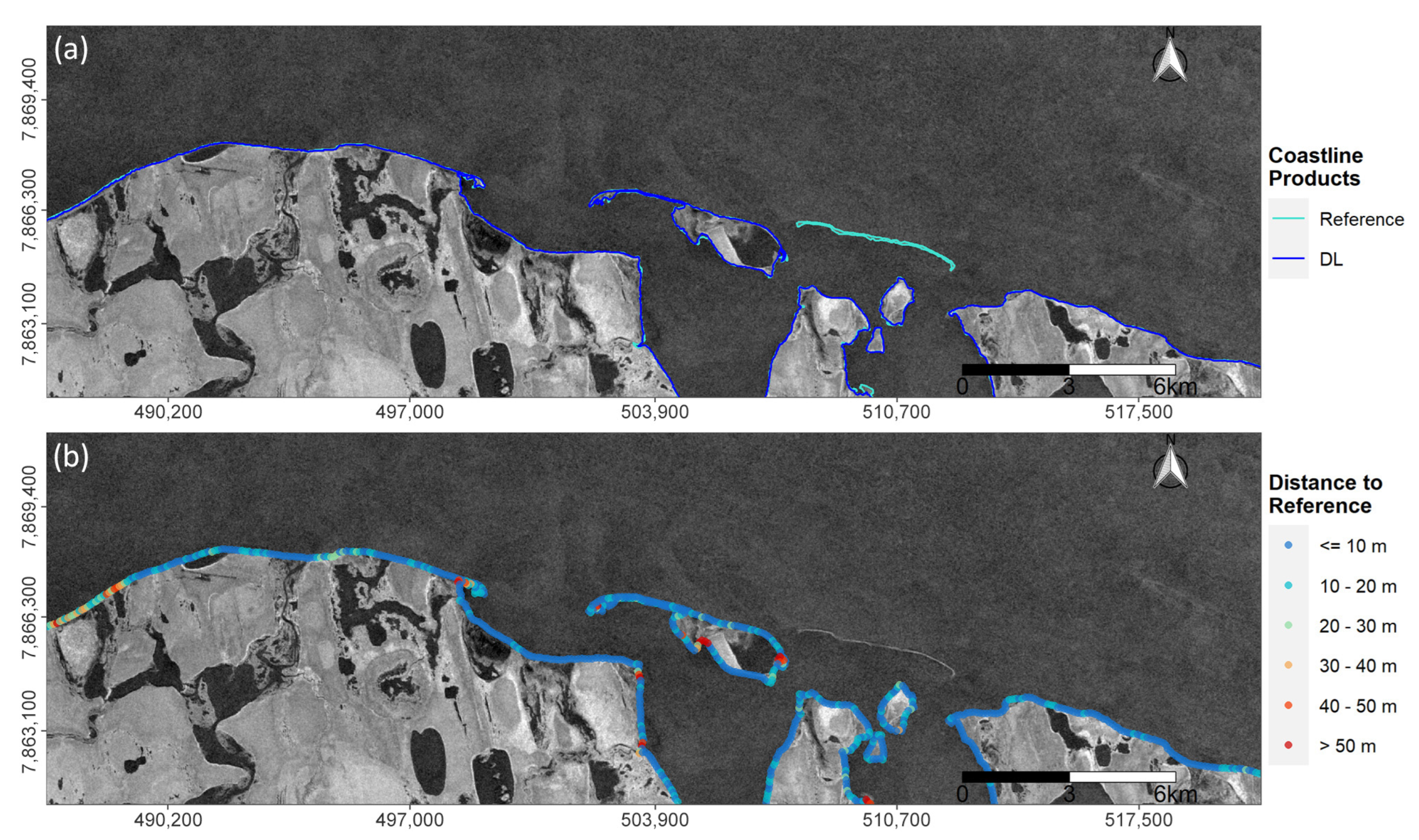
Table A1). Therefore, the algorithm was largely successful in differentiating between inland water bodies and sea area. By taking the mode from the nine resulting classification maps, the most representative land-cover class per pixel could be derived. Moreover, taking the mode reduced the overall amount of noise from the misclassified pixels compared to the individual classification maps of each model. Having said that, high accuracy numbers are expected for a binary classification. Because the focus of this study lies on the change of permafrost-affected coastlines, the correct identification of the boundary between the land and sea is especially of relevance. Therefore, the accuracy metrics of the final binary classification map within a 500 m buffer around the manually digitized coastline were provided. Overall, the accuracy was hereby slightly lower compared to the accuracies across the entire scene while still being high with an average value of 0.974. No significant deviations in the accuracy metrics between the training and validation areas could be observed. Moreover, the deviation of the final coastline product compared to the manually digitized reference line proved to be ±28 m on average.
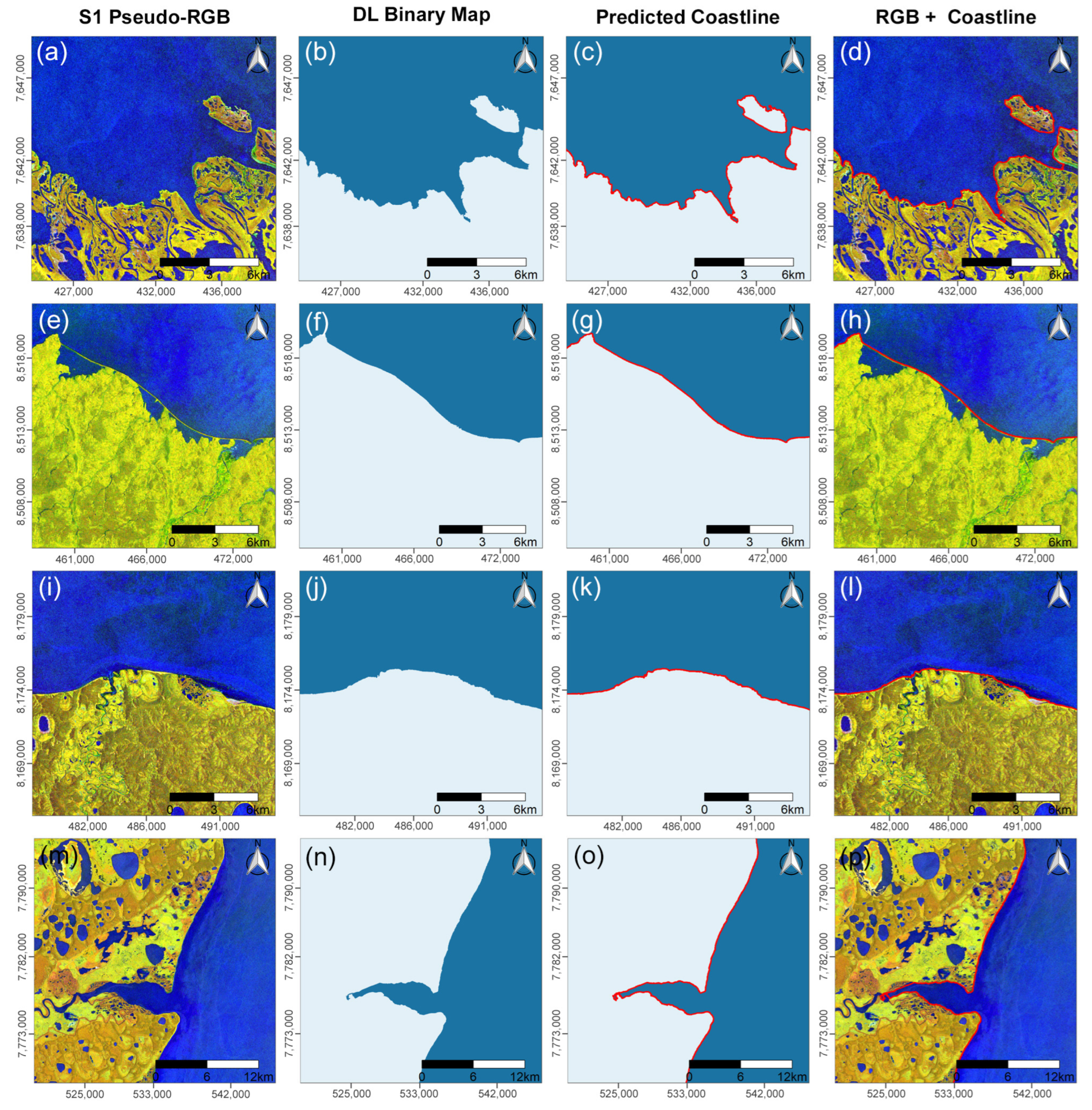
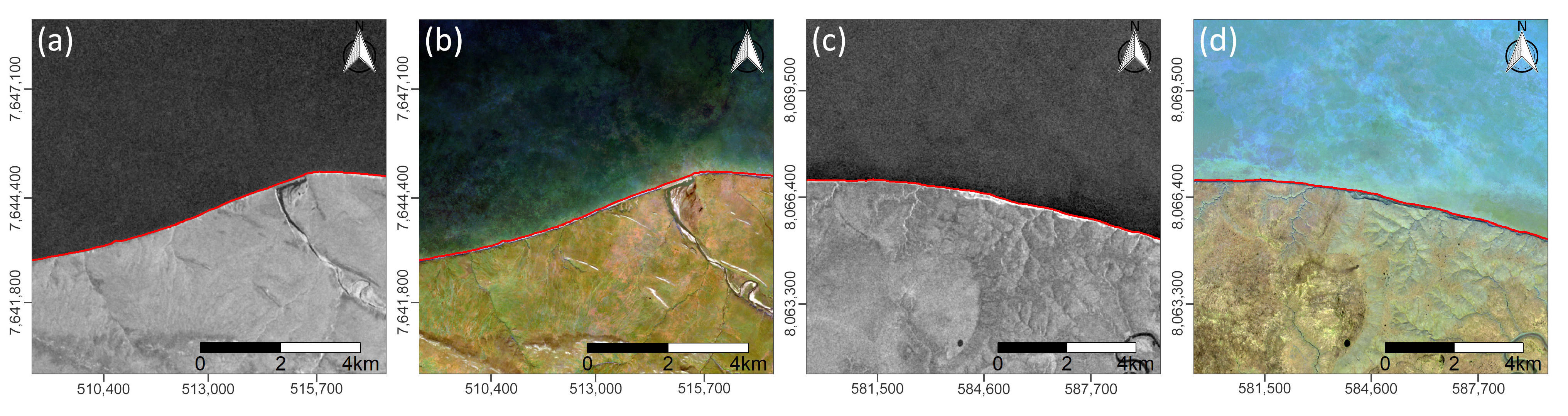
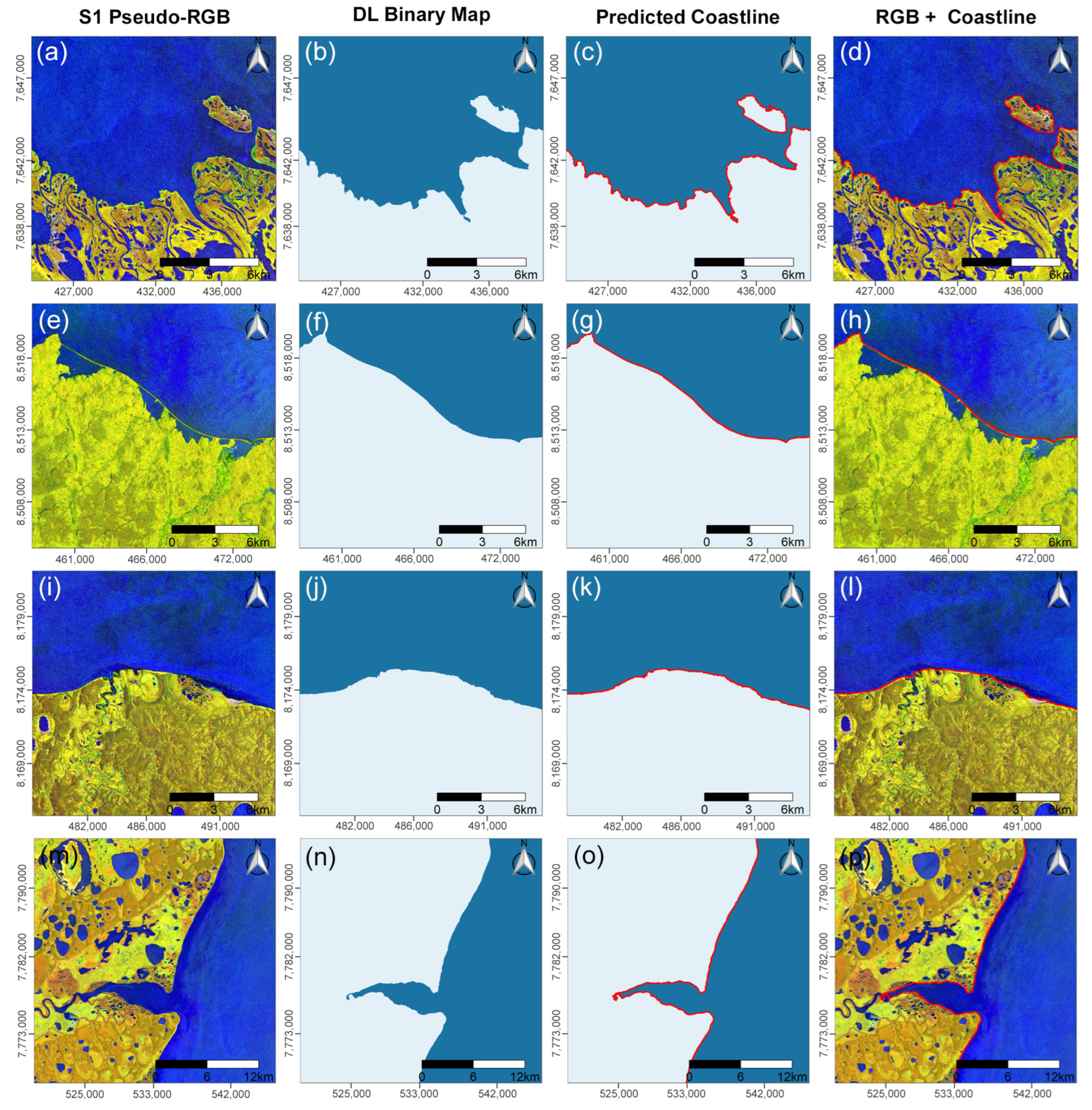
Uncertainties in the classification occurred in areas where a hard differentiation between sea and land is difficult even by visual interpretation, such as flat sandy coasts. Furthermore, river deltas tend to be challenging as the algorithm might struggle to identify where the mouth of a river starts and the actual river ends. Despite these challenges, the algorithm proved to be capable even in these challenging environments, as visualized in
Figure 8. Moreover, the U-Net framework proved, for the most part, to successfully differentiate between inland water bodies and the open sea area. The remaining inland lakes could be removed via a simple closing holes algorithm. Lastly, the reference data are based on satellite imagery derived from S1, S2, and Google Earth. Although in situ measurements would be favorable, working with 1038 km of manually digitized coastline based on high-resolution satellite imagery (<=10 m) as a reference is interpreted as a reasonable approach for this first step toward a circum-Arctic-scale permafrost coastal erosion analysis on a 10 m spatial resolution.
The extracted coastline featured an average accuracy of ±28 m and thus outperformed other existing, freely available, and circum-Arctic coastline datasets (
Table 4) across the investigated regions. The CAVM coastline was derived from the Digital Chart of the World (DCW) dataset, released in 1992, on a scale of 1:1,000,000 [
101]. Despite being one of the most comprehensive global databases of its time, it has not been updated since 1992. Moreover, the original coastline from the DCW was further simplified by, e.g., removing islands smaller than 49 km
and by combining any two lines closer than 0.5 km [
102]. The GSHHG, formerly known as the Global Self-consistent, Hierarchical, High-resolution Shorelines (GSHHS), is based on the World Vector Shorelines (WVS), the CIA World Data Bank II (WDBII), and the Atlas of the Cryosphere (AC) and was last updated in the year 2017 [
54,
103]. OSM is a community-driven and non-commercial project that aims to have a complete record of the world’s geographic features built through crowd-sourcing [
104]. It is the most successful geographic information-based crowd-sourced project to date and became a popular data source [
105]. Although the coastline derived from OSM featured the highest accuracy out of the three publicly available shoreline products mentioned in this study, the quality of the product varies strongly across different regions. The S1 and DL-based coastline computation process, as proposed within the framework of the study, offers not only high accuracy but also an up-to-date observation of the current state for these highly dynamic regions and can prospectively be applied for the entire Arctic.
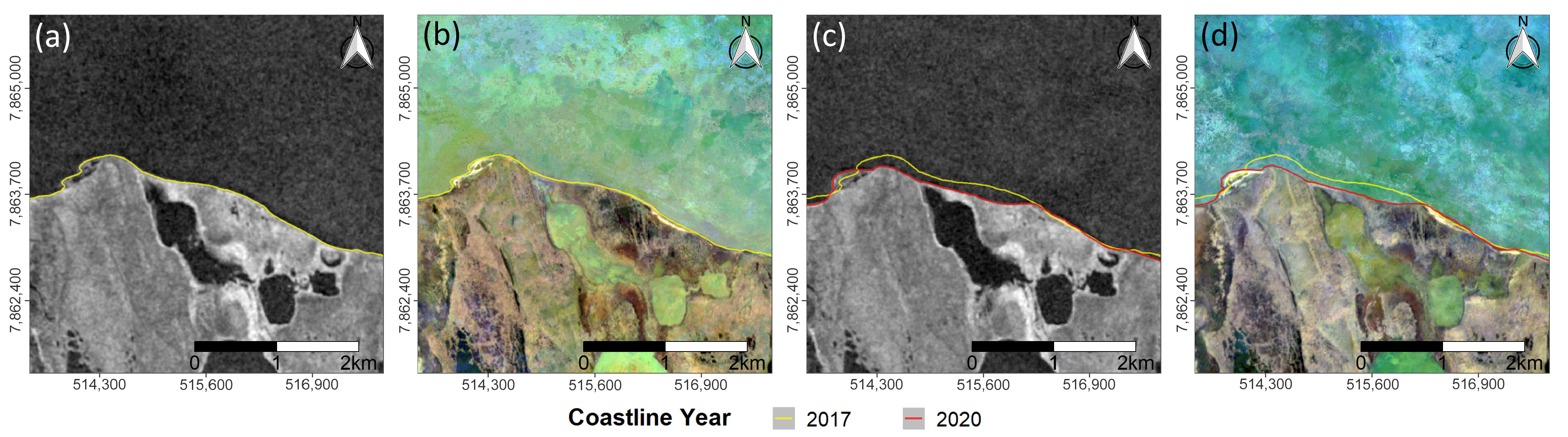
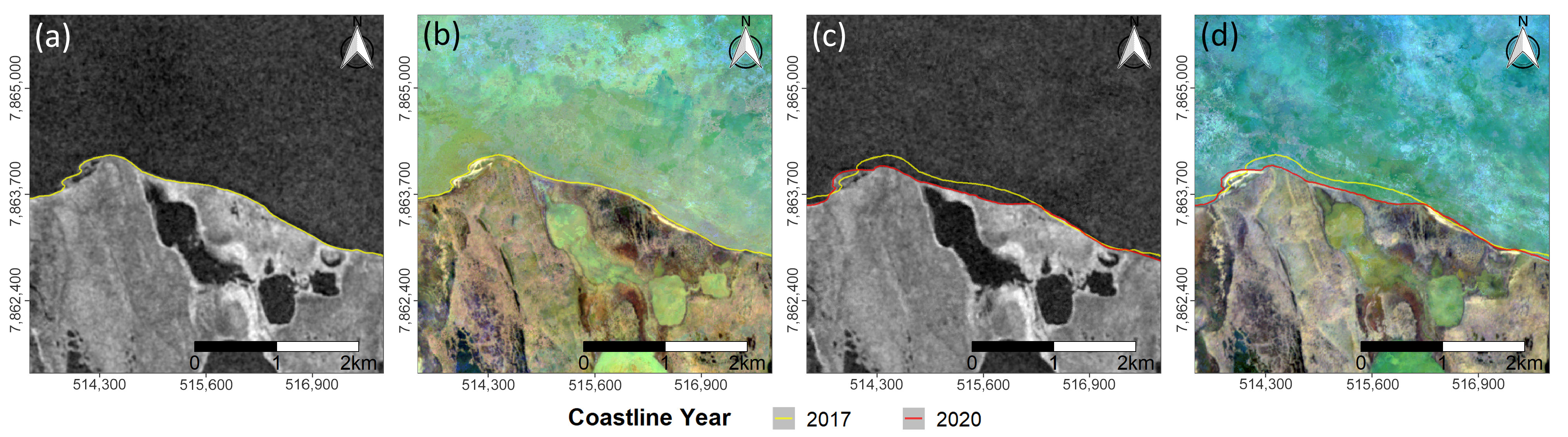
The mostly inverse behavior of annual sd and annual median backscatter was not only useful for the DL framework but could also be exploited for the CVA. Compared to traditional post-classification change detection approaches, an accumulation of errors from the separate input classifications is avoided in the physical-based CVA approach [
56]. Moreover, the CVA method tends to be more flexible and less computationally intensive in comparison to multi-date classification change detection [
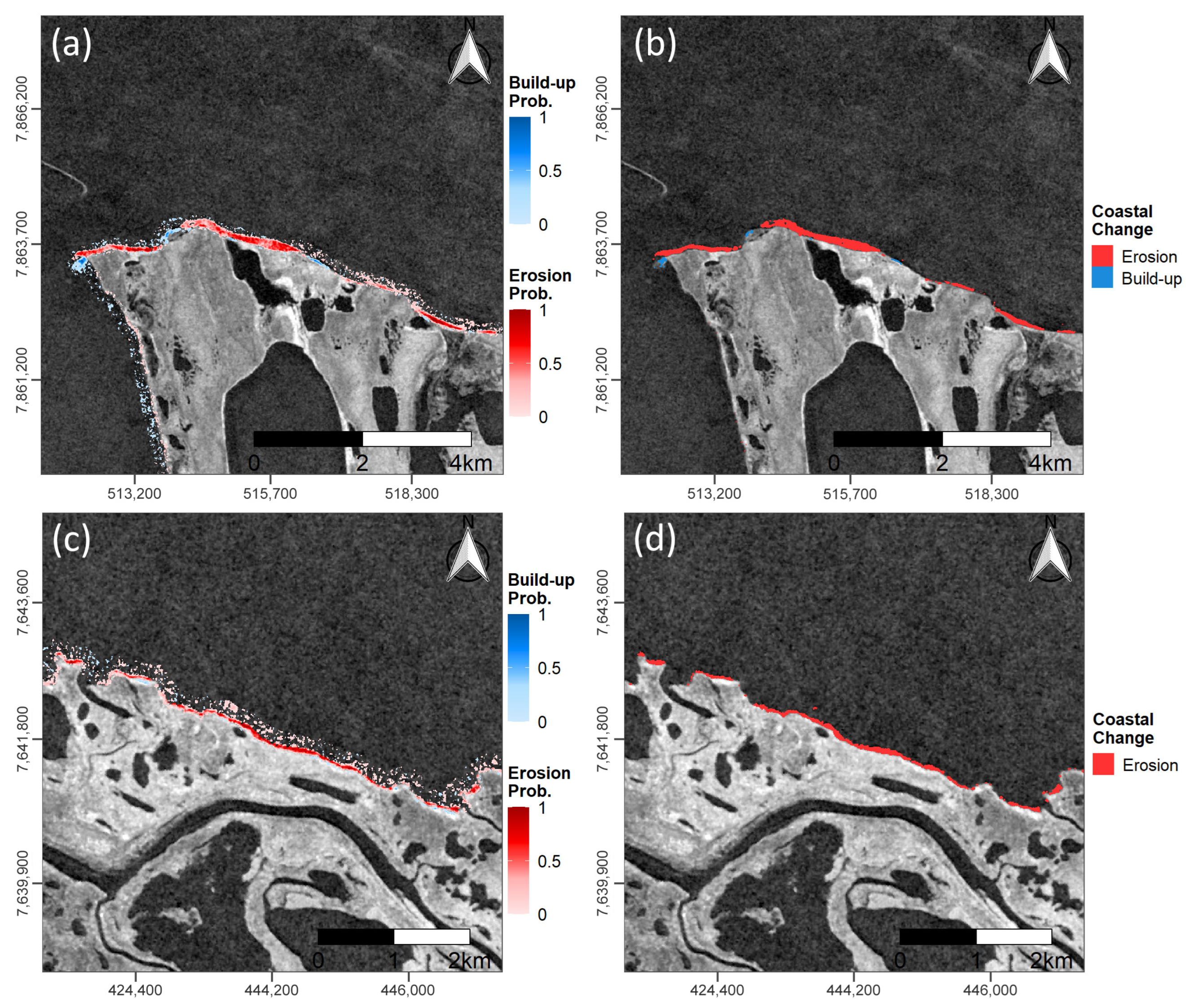
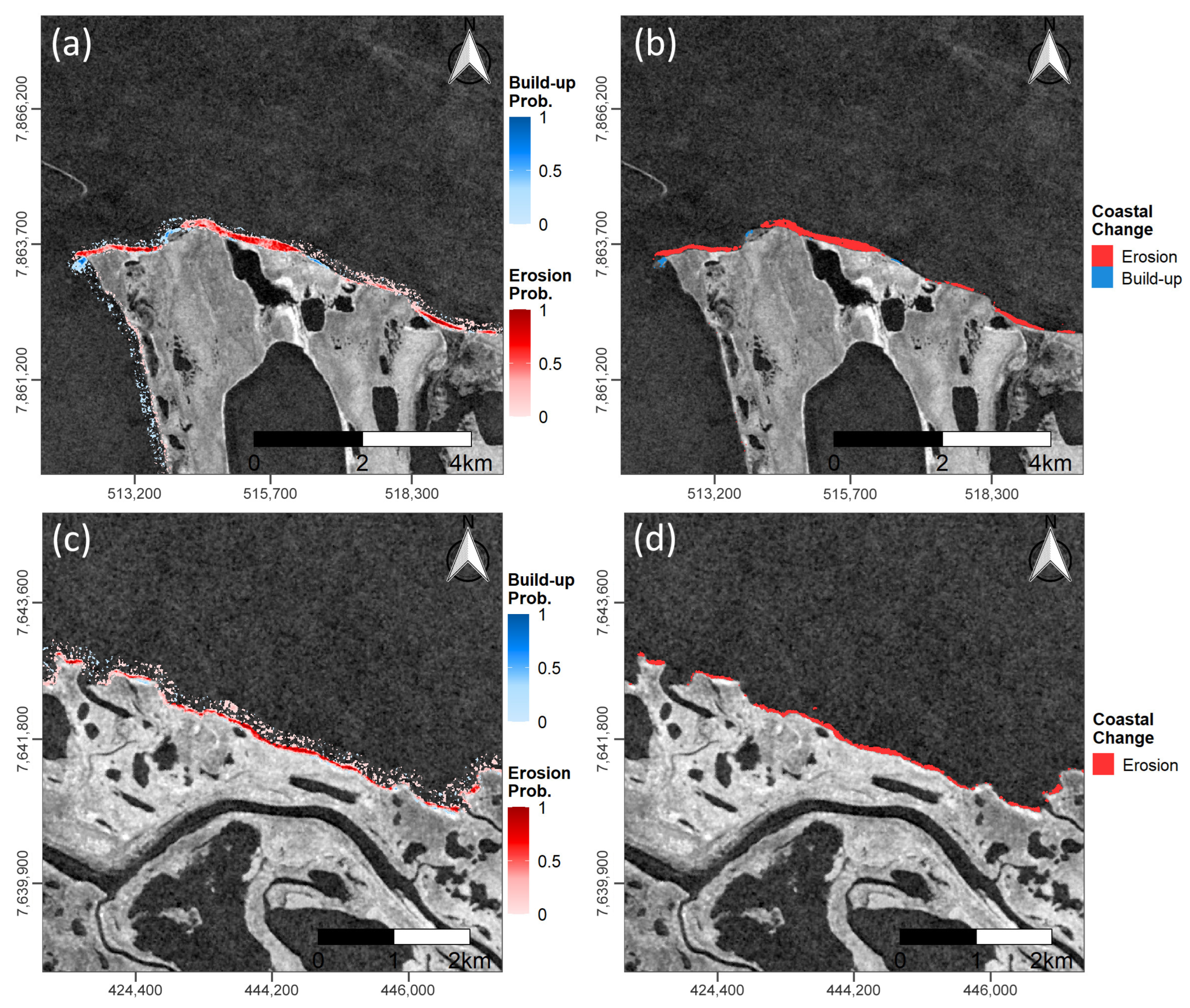
65]. Because the median proved to be higher over land, whereas the sd was higher over water, a change from a high median backscatter to a high sd backscatter could be interpreted as a change from land to water and, thus, as erosion. Logically, a change from a high sd to a high median could be interpreted as build-up. The resulting probability maps visualize areas of coastal erosion and build-up but also noise in the form of low probability of change pixels scattered across the water (
Figure 10). Because the sea surface is not stable but features slightly different backscatter values in each observation due to the previously mentioned capillary and gravity waves [
89], the annual median and sd backscatter values deviate to some degree for each year. Hence, as the CVA computes the magnitude of change in each direction [
56,
57], this deviation in backscatter intensity is being picked up by the probability maps. However, the magnitude of change from land to water and vice versa is, for the most part, significantly stronger compared to the variations within the sea or terrestrial area alone. Therefore, actual coastal change can be derived by applying a threshold to the probability maps. A threshold of 0.35 for erosion and 0.6 for build-up is recommended for the investigated areas. However, optimal threshold values might change, depending on the area, coast type, and data availability. The accuracy assessment revealed that a CVA slightly underestimates the actual change with an average deviation of −10.3 m while at the same time favoring less amount of noise. By adjusting the thresholds, the underestimation could potentially be reduced, and small coastal change rates could be detected more securely at the risk of introducing a higher amount of noise. For this scenario, the probability maps provide a valuable reference in defining the most suitable threshold values across the abundance of different Arctic coastal environments.
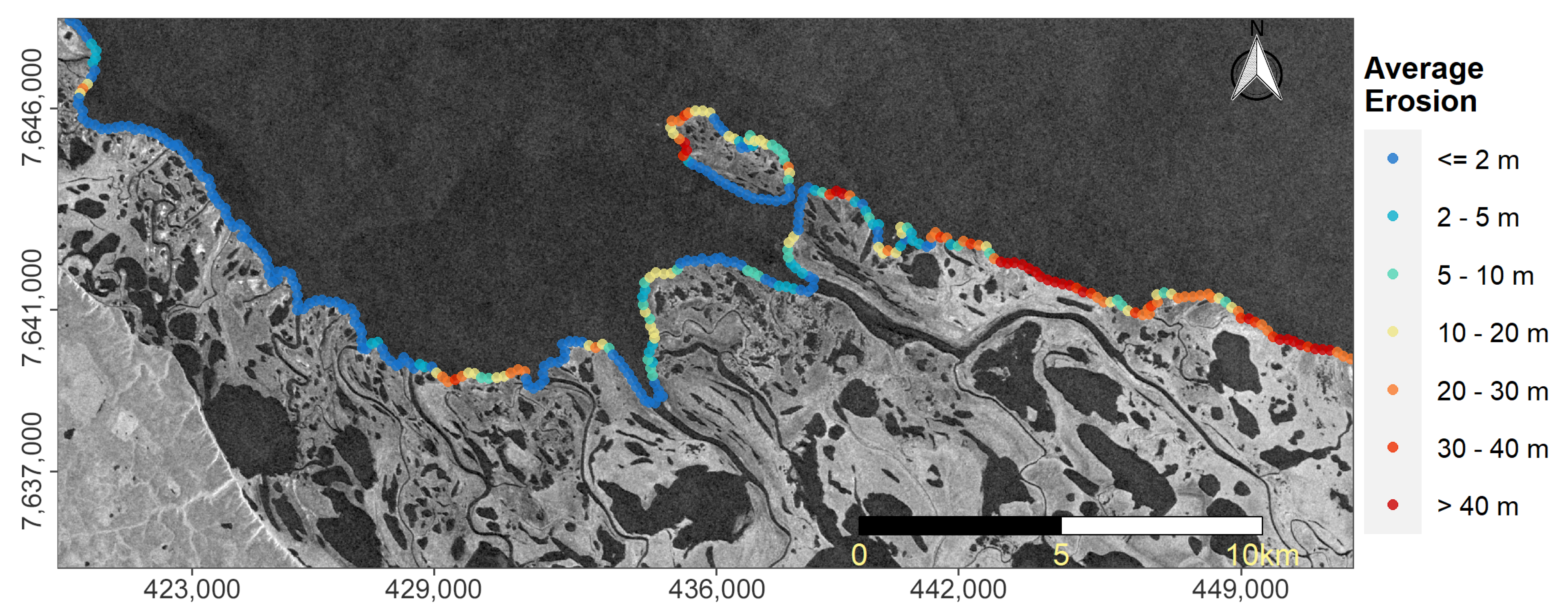
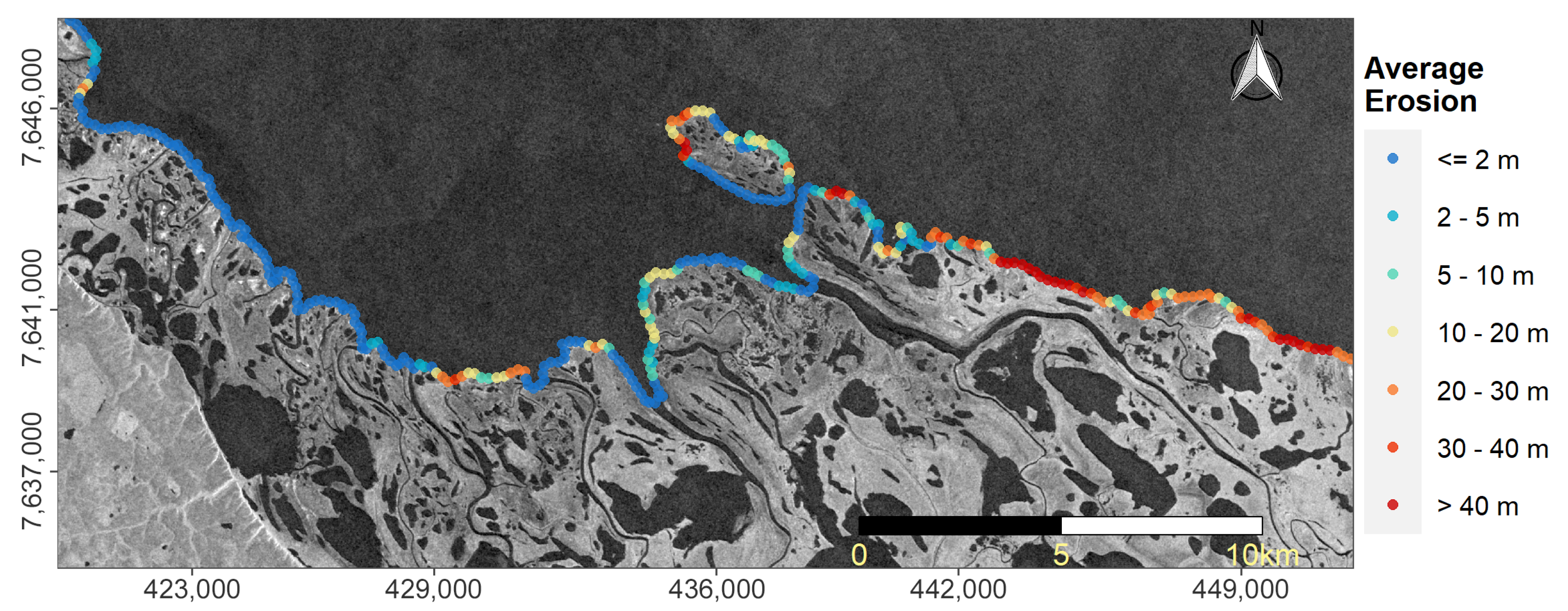
The extracted erosion rates agree with numbers published in the previous literature. Especially Drew Point–Cape Halkett in Alaska featured the overall strongest average (22 m in three years; 7.3 m/year) and maximum (160.3 m in three years; 53.4 m/year) erosion rates across all the investigated areas. This matches with observations by Jones et al. [
12] who investigated the annual erosion of the Drew Point coast from 2007 to 2016 via very high resolution optical satellite imagery. Annual average erosion rates ranged hereby between 6.7 and 22.6 m, with maximum annual erosion rates between 19.6 and 48.8 m [
12]. Similarly, in a recent study by Wang et al. [
106], erosion rates of 30.8–51.4 m/year were identified for six study locations distributed across the Drew Point coast during the time period 2009–2017 via Landsat data. In contrast, the extracted average erosion rates for other investigated regions such as Mus-Khaya Cape–Mouth of Peshanaya, Russia (aoi 06), and Bezimyanniy Cape–Eastern Oyagoss Cape, Russia (aoi 09), are comparatively small. Similar findings for these regions were reported in a study by Günther et al. [
107], who employed high-resolution historical and up-to-date satellite imagery covering a time span between 1965 and 2011 to identify the average erosion rates of 2.1 m/year for Cape Mamontov Klyk (partially covered by aoi 06) and 3.4 m/year for Oyogos Yar (partially covered by aoi 09). Deviations between predicted erosion values and numbers published in the previous literature can be attributed to different spatial resolutions of applied data, non-identical observed temporal windows, as well as the size and exact locations of the investigated regions.
On the one hand, the proposed methods and data provide a valuable tool for quantifying erosion and build-up rates of Arctic permafrost coasts. On the other hand, the quality of the output product strongly depends on the amount of available S1 backscatter data, which varies over space and time [
108,
109]. At the time of writing this article, no data have been generated by S1B since December 23rd 2021 due to an on-board anomaly and, thus, currently having only one of the two S1 satellites active [
110]. Depending on the number of available scenes, the optimal threshold might deviate from the proposed threshold values in this study. In this case, the associated probability map is a useful tool for identifying the most suitable threshold for a given area and time span. Furthermore, as mentioned by Bartsch et al. [
26], SAR-specific challenges, including RADAR shadows, foreshortening, and ambiguities in the backscatter behavior, might restrict the applicability in some areas. That said, the majority of noise originating from backscatter ambiguities, geolocation uncertainties, and tidal changes was mostly averaged out by working on annual composites. Moreover, while the applied Deep Learning method generated a coastline product with high accuracy values for both the training and validation sites, more training data might be needed for a circum-Arctic application in order to account for the diversity of Arctic coastal environments. Lastly, despite working on satellite data with a relatively high spatial resolution, quantifying the rates of erosion and build-up is only meaningful if the observed change is greater than or equal to the size of one pixel, which in the case of the S1 GRD data is 10 m. However, by increasing the observation time span, the applicability of the continuously generated S1 GRD scenes also increases, even for areas with little erosion processes. Therefore, S1 is a very attractive data source for the current and future SAR-based monitoring of changes in Arctic permafrost coasts. Next to S1, the proposed methods could also be applied to SAR data from other satellite programs, such as the RADARSAT Constellation Mission (RCM) [
111]. This mission has a high potential for extracting detailed shoreline information, especially when combining the backscatter information with optical imagery from, e.g., the Landsat legacy [
112].
Stronger erosion rates of Arctic permafrost coasts are reported for recent years and are expected to further increase in the future [
11,
12,
107,
113]. As mentioned in a recent review article by Irrgang et al. [
11], rapid changes in Arctic coastal environments call for a coordinated and interdisciplinary effort of not only scientists but also policymakers, stakeholders, and the local population in order to develop suitable adaptation and mitigation strategies. This highlights the need for a continuous and large- to circum-Arctic-scale monitoring framework of Arctic coastlines. As demonstrated in this study, S1 imagery in combination with DL and CVA provides a powerful tool to address this challenge. The proposed methods and data can be applied on a pan-Arctic scale and the observed coastal change rates may subsequently be used as a reference for quantifying the volume loss of frozen ground, and for estimating the release of stored organic carbon content in future analyses.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}