
Detection of Flash Flood Inundated Areas Using Relative Difference in NDVI from Sentinel-2 Images: A Case Study of the August 2020 Event in Charikar, Afghanistan



Abstract
:
1. Introduction
2. The Charikar Flash Flood and Dataset
2.1. Study Area
2.2. The Flash Flood in Charikar
2.3. Data Sets
3. Methodology
3.1. NDVI and Spectral Water Indices
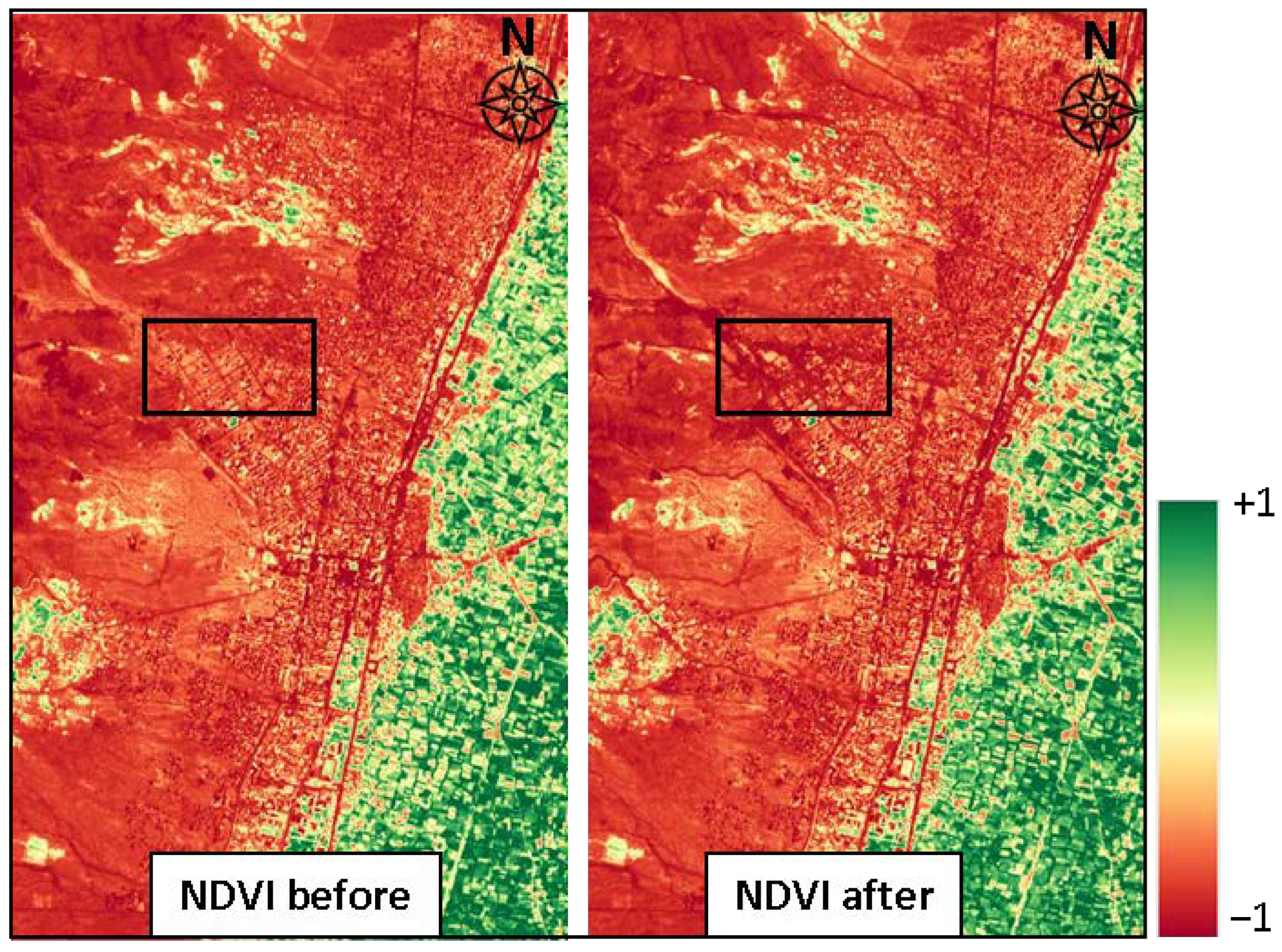
3.1.1. Normalized Difference Vegetation Index (NDVI)
3.1.2. Normalized Difference Water Index (NDWI)
3.1.3. Normalized Difference Moisture Index (NDMI)
3.2. Relative Difference in NDVI (rdNDVI)
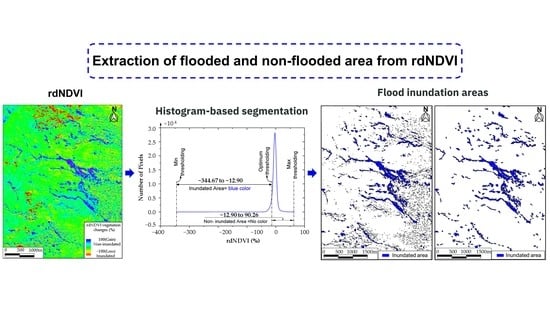
3.3. Histogram-Based Segmentation
3.4. Accuracy Assessment Procedures Using Confusion Matrix
3.5. Flood Susceptibility Mapping Model Based on Flow-R
4. Results
4.1. Extraction of Flood-Inundated Areas
4.2. Inundation Map by Visual Interpretation
4.3. Accuracy Assessment
5. Discussion
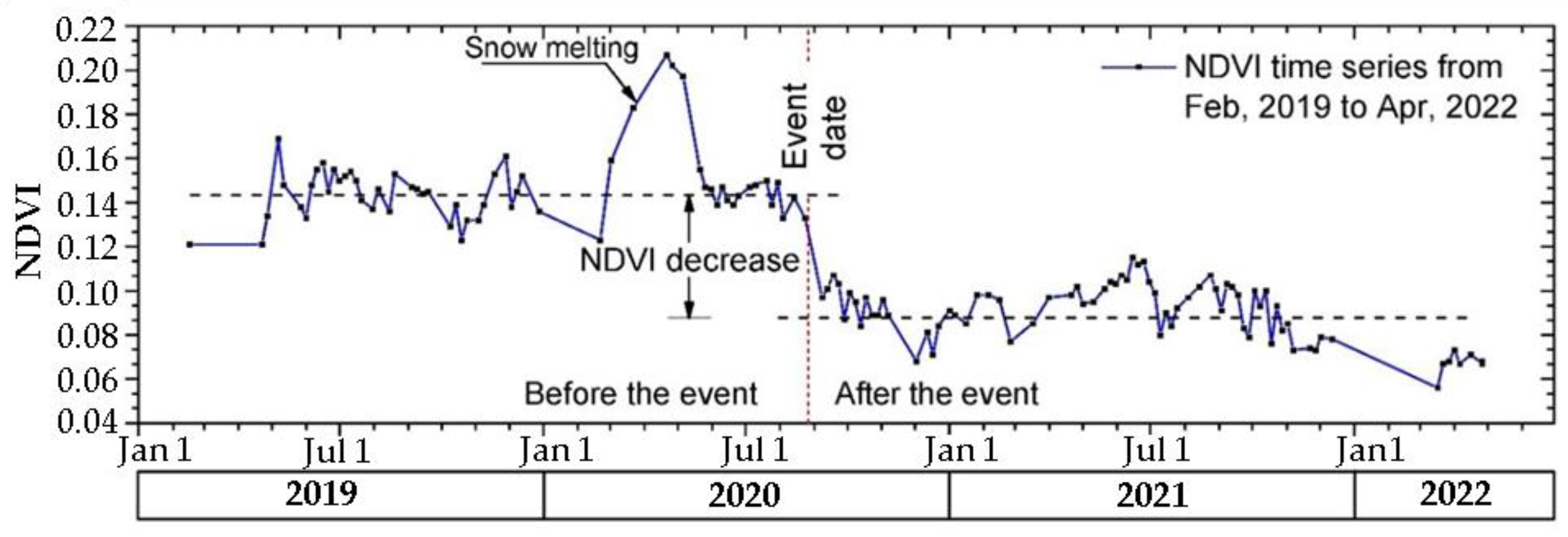
5.1. Monitoring the Changes in the Affected Area in Two Years
5.2. Flow Propagation Analysis by Flow-R
5.3. Practical Use of the Method and Future Aspects
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- United Nations International Strategy for Disaster Reduction (UNISDR). The Human Cost of Weather-Related Disaster 1995–2015. Available online: https://www.preventionweb.net/publication/human-cost-weather-related-disasters-1995-2015 (accessed on 12 March 2022).
- Freebairn, A.; Turmine, V.; Singh, R. Climate as a risk multiplier-trends in vulnerability and exposure. In World Disasters Report 2020 Come Heat or High Water; Hagon, K., Ed.; IFRC: Geneva, Switzerland, 2020; pp. 119–126. [Google Scholar]
- Embabi, N.S. The Geomorphology of Egypt: Landforms and Evolution: The Nile Valley and the Western Desert; Egyptian Geographical Society: Cairo, Egypt, 2004; Volume 1. [Google Scholar]
- Chin, A.; Gregory, K.J. Urbanization and adjustment of ephemeral stream channels. Ann. Assoc. Am. Geogr. 2001, 91, 595–608. [Google Scholar] [CrossRef]
- Khosravi, K.; Shahabi, H.; Pham, B.T.; Adamowski, J.; Shirzadi, A.; Pradhan, B.; Dou, J.; Ly, H.-B.; Gróf, G.; Ho, H.L.; et al. A comparative assessment of flood susceptibility modeling using Multi-Criteria Decision-Making Analysis and Machine Learning Methods. J. Hydrol. 2019, 573, 311–323. [Google Scholar] [CrossRef]
- Muis, S.; Güneralp, B.; Jongman, B.; Aerts, J.C.J.H.; Ward, P.J. Flood risk and adaptation strategies under climate change and urban expansion: A probabilistic analysis using global data. Sci. Total Environ. 2015, 538, 445–457. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.; Westra, S.; Leonard, M. A basis function approach for exploring the seasonal and spatial features of storm surge events. Geophys. Res. Lett. 2017, 44, 7356–7365. [Google Scholar] [CrossRef]
- Zaji, A.H.; Bonakdari, H.; Gharabaghi, B. Remote sensing satellite data preparation for simulating and forecasting river discharge. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3432–3441. [Google Scholar] [CrossRef]
- El Hames, A.; Richards, K.S. An integrated physically based model for arid region flash flood prediction capable of simulating dynamic transmission loss. J. Hydrol. Process. 1998, 12, 1219–1232. [Google Scholar] [CrossRef]
- Walling, D.E.; Gregory, K.J. The measurement of the effects of building construction on drainage basin dynamics. J. Hydrol. 1970, 11, 129–144. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Rogers, A.S.; Kearney, M.S. Reducing signature variability in unmixing coastal marsh Thematic Mapper scenes using spectral indices. Int. J. Remote Sens. 2004, 25, 2317–2335. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalized difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Wang, S.; Baig, M.H.A.; Zhang, L.; Jiang, H.; Ji, Y.; Zhao, H.; Tian, J. A simple enhanced water index (EWI) for percent surface water estimation using Landsat data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 90–97. [Google Scholar] [CrossRef]
- Rokni, K.; Ahmad, A.; Selamat, A.; Hazini, S. Water feature extraction and change detection using multitemporal Landsat imagery. Remote Sens. 2014, 6, 4173–4189. [Google Scholar] [CrossRef] [Green Version]
- Duan, Z.; Bastiaanssen, W.G.M. Estimating water volume variations in lakes and reservoirs from four operational satellite altimetry databases and satellite imagery data. Remote Sens. Environ. 2013, 134, 403–416. [Google Scholar] [CrossRef]
- Davranche, A.; Lefebvre, G.; Poulin, B. Wetland monitoring using classification trees and SPOT-5 seasonal time series. Remote Sens. Environ. 2010, 114, 552–562. [Google Scholar] [CrossRef] [Green Version]
- Poulin, B.; Davranche, A.; Lefebvre, G. Ecological assessment of Phragmites australis wetlands using multi-season SPOT-5 scenes. Remote Sens. Environ. 2010, 114, 1602–1609. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.R.; Liu, H.Q.; Batchily, K.; van Leeuwen, W. A comparison of vegetation indices over a global set of TM images for EOS-MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Escuin, S.; Navarro, R.; Fernández, P. Fire severity assessment by using NBR (normalized burn ratio) and NDVI (normalized difference vegetation index) derived from LANDSAT TM/ETM images. Int. J. Remote Sens. 2008, 29, 1053–1073. [Google Scholar] [CrossRef]
- Sidi Almouctar, M.A.; Wu, Y.; Kumar, A.; Zhao, F.; Mambu, K.J.; Sadek, M. Spatiotemporal analysis of vegetation cover changes around surface water based on NDVI: A case study in Korama basin, Southern Zinder, Niger. Appl. Water Sci. 2021, 11, 4. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, extracting, and monitoring surface water from space using optical sensors: A review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar] [CrossRef]
- DeVries, B.; Huang, C.; Armston, J.; Huang, W.; Jones, J.W.; Lang, M.W. Rapid and robust monitoring of flood events using Sentinel-1 and Landsat data on the Google Earth Engine. Remote Sens. Environ. 2020, 240, 111664. [Google Scholar] [CrossRef]
- Scheip, C.M.; Wegmann, K.W. HazMapper: A global open-source natural hazard mapping application in Google Earth Engine. Nat. Hazards Earth Syst. Sci. 2021, 21, 1495–1511. [Google Scholar] [CrossRef]
- Saah, D.; Tenneson, K.; Matin, M.; Uddin, K.; Cutter, P.; Poortinga, A.; Nguyen, Q.H.; Patterson, M.; Johnson, G.; Markert, K.; et al. Land cover mapping in data scarce environments: Challenges and opportunities. Front. Environ. Sci. 2019, 7, 150. [Google Scholar] [CrossRef] [Green Version]
- Phongsapan, K.; Chishtie, F.; Poortinga, A.; Bhandari, B.; Meechaiya, C.; Kunlamai, T.; Aung, K.S.; Saah, D.; Anderson, E.; Markert, K.; et al. Operational flood risk index mapping for disaster risk reduction using earth observations and cloud computing technologies: A case study on Myanmar. Front. Environ. Sci. 2019, 7, 191. [Google Scholar] [CrossRef] [Green Version]
- Poortinga, A.; Nguyen, Q.; Tenneson, K.; Troy, A.; Saah, D.; Bhandari, B.; Ellenburg, W.L.; Aekakkararungroj, A.; Ha, L.; Pham, H.; et al. Linking earth observations for assessing the food security situation in Vietnam: A landscape approach. Front. Environ. Sci. 2019, 7, 186. [Google Scholar] [CrossRef] [Green Version]
- Patel, N.N.; Angiuli, E.; Gamba, P.; Gaughan, A.; Lisini, G.; Stevens, F.R.; Tatem, A.J.; Trianni, G. Multitemporal settlement and population mapping from Landsat using Google Earth Engine. Int. J. Appl. Earth Obs. Geoinf. 2015, 35, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Mutanga, O.; Kumar, L. Google Earth Engine applications. Remote Sens. 2019, 11, 591. [Google Scholar] [CrossRef] [Green Version]
- Horton, P.; Jaboyedoff, M.; Rudaz, B.; Zimmermann, M. Flow-R, a model for susceptibility mapping of debris flows and other gravitational hazards at a regional scale. Nat. Hazards Earth Syst. Sci. 2013, 13, 869–885. [Google Scholar] [CrossRef] [Green Version]
- Atefi, M.R.; Miura, H. Detection and Volume Estimation of Large-Scale Landslide in Abe Barek, Afghanistan Using Nonlinear Mapping of DEMs. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 3757–3760. [Google Scholar] [CrossRef]
- Atefi, M.R.; Miura, H. Volumetric analysis of the landslide in Abe Barek, Afghanistan based on nonlinear mapping of stereo satellite imagery-derived DEMs. Remote Sens. 2021, 13, 446. [Google Scholar] [CrossRef]
- Tolo News Reporters’ Team. Over 110 killed in flash floods in Afghanistan. Tolo News. 27 August 2020. Available online: https://tolonews.com/afghanistan/over-110%C2%A0killed-flash-floods-afghanistan (accessed on 2 March 2022).
- Gibbons, T.; Fahim Abed, N. Nearly 80 killed as flash floods ravage city in Afghanistan. The New York Times. 26 August 2020. Available online: https://www.nytimes.com/2020/08/26/world/asia/afghanistan-floods-charikar.html (accessed on 2 March 2022).
- Glinski, S. Many people are still missing’: Afghanistan families devastated by flash floods. The Guardian. September 2020. Available online: https://www.theguardian.com/world/2020/sep/01/many-people-are-still-missing-afghanistan-flash-floods (accessed on 10 March 2022).
- Paikan, W. Flood in Afghanistan killed hundreds in Parwan Province. Independent Farsi. 26 August 2020. Available online: https://tinyurl.com/independentpersian (accessed on 3 March 2022).
- Gul, R. People walk near damaged houses after the 2020 heavy flooding in the Charikar, Parwan province. Fox News. 26 August 2020. Available online: https://www.foxnews.com/world/floods-in-north-east-afghanistan-leave-at-least-100-dead (accessed on 10 March 2022).
- Kohsar, W. Scores Killed, Many Still Missing after Flash Floods Ravage Afghanistan, Crumbling Homes. Cbsnews. 26 August 2020. Available online: https://www.cbsnews.com/news/flood-in-afghanistan-flash-flooding-over-100-deaths-many-missing-charikar-parwan-today-2020-08-27/ (accessed on 10 March 2022).
- Gul, R. Dozens Killed, Homes Swept Away, By Flash Floods in Afghanistan. RFE/RL Radio Azadi AP. 26 August 2020. Available online: https://www.rferl.org/a/afghanistan-weather-floods/30803355.html (accessed on 10 March 2022).
- Azadmansh, O. A general view of a building in Charikar covered with flooded debris of flooding in Parwan. Reuters. 26 August 2020. Available online: https://www.thestar.com.my/news/world/2020/08/26/flash-floods-kill-more-than-70-in-afghanistan (accessed on 10 March 2022).
- ESA Standard Document; Sentinel-2 User Handbook. European Space Agency (ESA): Paris, France, 24 July 2015. Issue 1, Revision 1. Available online: https://sentinel.esa.int/documents/247904/685211/sentinel-2_user_handbook (accessed on 10 March 2022).
- Szostak, M.; Hawryło, P.; Piela, D. Using of Sentinel-2 images for automation of the forest succession detection. Eur. J. Remote Sens. 2018, 51, 142–149. [Google Scholar] [CrossRef]
- Miranda, E.; Mutiara, A.B.; Wibowo, W.C. Classification of land cover from Sentinel-2 imagery using supervised classification technique (preliminary study). In Proceedings of the 2018 International Conference, Information Management and Technology (ICIMTech), Jakarta, Indonesia, 3–5 September 2018; pp. 69–74. [Google Scholar]
- Wang, D.; Wan, B.; Qiu, P.; Su, Y.; Guo, Q.; Wang, R.; Sun, F.; Wu, X. Evaluating the performance of Sentinel-2, Landsat-8 and Pléiades-1 in mapping mangrove extent and species. Remote Sens. 2018, 10, 1468. [Google Scholar] [CrossRef] [Green Version]
- Campos-Taberner, M.; García-Haro, F.J.; Martínez, B.; Izquierdo-Verdiguier, E.; Atzberger, C.; Camps-Valls, G.; Gilabert, M.A. Understanding deep learning in land use classification based on Sentinel-2 time series. Sci. Rep. 2020, 10, 17188. [Google Scholar] [CrossRef] [PubMed]
- Caballero, I.; Ruiz, J.; Navarro, G. Sentinel-2 satellites provide near-real time evaluation of catastrophic floods in the west Mediterranean. Water 2019, 11, 2499. [Google Scholar] [CrossRef] [Green Version]
- Dinh, D.A.; Elmahrad, B.; Leinenkugel, P.; Newton, A. Time series of flood mapping in the Mekong delta using high resolution satellite images. IOP Conf. Ser. Earth Environ. Sci. 2019, 266, 12011. [Google Scholar] [CrossRef]
- Rättich, M.; Martinis, S.; Wieland, M. Automatic flood duration estimation based on multi-sensor satellite data. Remote Sens. 2020, 12, 643. [Google Scholar] [CrossRef] [Green Version]
- Solovey, T. Flooded wetlands mapping from Sentinel-2 imagery with spectral water index: A case study of Kampinos national park in central Poland. Geol. Q. 2020, 64, 492–505. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Su, J.; Liu, C.; Chen, W. Potential bands of Sentinel-2A satellite for classification problems in precision agriculture. Int. J. Autom. Comput. 2019, 16, 16–26. [Google Scholar] [CrossRef] [Green Version]
- Kobayashi, N.; Tani, H.; Wang, X.; Sonobe, R. Crop classification using spectral indices derived from Sentinel-2A imagery. J. Inf. Syst. Telecommun. 2020, 4, 67–90. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS (Earth Resources Technology Satellite). In Proceedings of the 3rd Earth Resources Technology Satellite Symposium, Greenbelt, MD, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Hardisky, M.A.; Dauber, F.C.; Roman, C.T.; Klemas, V. Remote sensing of biomass and annual net aerial primary productivity of a salt marsh. Remote Sens. Environ. 1984, 16, 91–106. [Google Scholar] [CrossRef]
- Gao, B.C. Ndwi-a normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (dNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Norman, S.P.; Koch, F.; Hargrove, W.W. Review of broad-scale drought monitoring of forests: Toward an integrated data mining approach. For. Ecol. Manag. 2016, 380, 346–358. [Google Scholar] [CrossRef] [Green Version]
- Norman, S.P.; Christie, W.M. Satellite-Based Evidence of Forest Stress and Decline across the Conterminous United States for 2016, 2017, and 2018; Gen. Tech. Rep. SRS-250; US Department of Agriculture, Forest Service, Southern Research Station: Asheville, NC, USA, 2020; Volume 2020, pp. 151–166.
- NASA/METI/AIST/Japan Space systems; U.S./Japan ASTER Science Team. ASTER Global Digital Elevation Model V003; NASA EOSDIS Land Processes DAAC: Pasadena, CA, USA, 2018. [Google Scholar] [CrossRef]
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes classification of landslide types, an update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Reports of flood from National Statistics and Information Authority. HashtiSubh. 31 August 2020. Available online: https://8am.af/satellite-images-of-the-parwan-flood-nearly-one-thousand-houses-have-been-damaged/ (accessed on 9 March 2022).
- International Water Management Institute (IWMI). Flash Flood Hit Charikar, Parwan Province in Afghanistan, FL-2020-0006-AF version 1; International Water Management Institute (IWMI): Colombo, Sri Lanka, 26 August 2020. [Google Scholar]
- Miura, H. Fusion analysis of optical satellite images and digital elevation model for quantifying volume in debris flow disaster. Remote Sens. 2019, 11, 1096. [Google Scholar] [CrossRef] [Green Version]
- Green, D.R.; King, S.D. Applying the geospatial technologies to estuary environments. In GIS for Coastal Zone Management; Bartlett, D., Smith, J., Eds.; CRS Press: New York, NY, USA, 2005; pp. 239–255. [Google Scholar]
- Buchori, I.; Sugiri, A.; Mussadun, M.; Wadley, D.; Liu, Y.; Pramitasari, A.; Pamungkas, I.T. A Predictive Model to Assess Spatial Planning in Addressing Hydro-meteorological Hazards: A Case Study of Semarang City, Indonesia. Int. J. Disaster Risk Reduct. 2018, 27, 415–426. [Google Scholar] [CrossRef]
- Luyuan, L.; Uyttenhove, P.; Van Eetvelde, V. Planning Green Infrastructure to Mitigate Urban Surface Water Flooding Risk-A Methodology to Identify Priority Areas Applied in the City of Ghent. Landsc. Urban Plan. 2020, 194, 103703. [Google Scholar]
- Tellman, B.; Sullivan, J.A.; Kuhn, C.; Kettner, A.J.; Doyle, C.S.; Brakenridge, G.R.; Slayback, D.A. Satellite imaging reveals increased proportion of population exposed to floods. Nature 2021, 596, 80–86. [Google Scholar] [CrossRef]
- Baig, M.A.; Xiong, D.; Rahman, M. How do multiple kernel functions in machine learning algorithms improve precision in flood probability mapping? Nat. Hazards 2022, 1–20. [Google Scholar] [CrossRef]
- Kawamura, Y.; Dewan, A.M.; Veenendaal, B.; Hayashi, M.; Shibuya, T.; Kitahara, I.; Ishii, K. Using GIS to Develop a Mobile Communications Network for Disaster-damaged Areas. Int. J. Digit. Earth 2014, 7, 279–293. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/ (accessed on 26 July 2022).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Image ID | Date Acquired | Cloud Cover Percentage | Relative Orbit | Pass Direction | Processing Level | |
|---|---|---|---|---|---|---|---|
| 1 | S2A_MSIL2A_20200605T060641 | 5 June 2020 | 1.10 | 134 | Descending | Level-1C | Before event |
| 2 | S2A_MSIL2A_20200615T060641 | 15 June 2020 | 0.63 | 134 | Descending | Level-1C | |
| 3 | S2A_MSIL2A_20200625T060641 | 25 June 2020 | 4.23 | 134 | Descending | Level-1C | |
| 4 | S2A_MSIL1C_20200705T060641 | 5 July 2020 | 23.75 | 134 | Descending | Level-1C | |
| 5 | S2A_MSIL2A_20200715T060641 | 15 July 2020 | 35.2 | 134 | Descending | Level-1C | |
| 6 | S2A_MSIL2A_20200725T060641 | 25 July 2020 | 8.63 | 134 | Descending | Level-1C | |
| 7 | S2A_MSIL2A_20200804T060641 | 4 August 2020 | 3.06 | 134 | Descending | Level-1C | |
| 8 | S2A_MSIL2A_20200814T060641 | 14 August 2020 | 1.20 | 134 | Descending | Level-1C | |
| 9 | S2A_MSIL2A_20200824T060641 | 24 August 2020 | 9.87 | 134 | Descending | Level-1C | |
| 10 | S2A_MSIL2A_20200913T060641 | 13 September 2020 | 8.7 | 134 | Descending | Level-1C | After event |
| 11 | S2A_MSIL2A_20200923T060641 | 23 September 2020 | 0.23 | 134 | Descending | Level-1C | |
| 12 | S2A_MSIL2A_20201003T060711 | 3 October 2020 | 0.82 | 134 | Descending | Level-1C | |
| 13 | S2A_MSIL2A_20201013T060821 | 13 October 2020 | 11.82 | 134 | Descending | Level-1C | |
| 14 | S2A_MSIL2A_20201023T060921 | 23 October 2020 | 0.68 | 134 | Descending | Level-1C |
| Actual Change Status | User’s Accuracy (%) | Producer’s Accuracy (%) | ||||
|---|---|---|---|---|---|---|
| Classes | Inundated (Pixels) | Non-Inundated (Pixels) | Row Total (Pixels) | |||
| Modeled change status | Inundated | 2323 | 524 | 2847 | 81.59 | 88.23 |
| Non-inundated | 310 | 4057 | 4367 | 92.90 | 88.56 | |
| Column total | 2633 | 4581 | 7214 | Overall accuracy | 88.44 | |
| Kappa Coefficient | 0.75 | |||||
| Types of Input | Flow-R Parameters | Value |
|---|---|---|
| Directions algorithm | Holmgren (1994) modified | Dh = 2, exponent = 4 |
| Inertial algorithm | Weights | Default |
| Friction loss function | Travel angle | 4, 5, 6 Degrees |
| Energy limitation | Velocity | 15 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atefi, M.R.; Miura, H. Detection of Flash Flood Inundated Areas Using Relative Difference in NDVI from Sentinel-2 Images: A Case Study of the August 2020 Event in Charikar, Afghanistan. Remote Sens. 2022, 14, 3647. https://doi.org/10.3390/rs14153647
Atefi MR, Miura H. Detection of Flash Flood Inundated Areas Using Relative Difference in NDVI from Sentinel-2 Images: A Case Study of the August 2020 Event in Charikar, Afghanistan. Remote Sensing. 2022; 14(15):3647. https://doi.org/10.3390/rs14153647
Chicago/Turabian StyleAtefi, Mujeeb Rahman, and Hiroyuki Miura. 2022. "Detection of Flash Flood Inundated Areas Using Relative Difference in NDVI from Sentinel-2 Images: A Case Study of the August 2020 Event in Charikar, Afghanistan" Remote Sensing 14, no. 15: 3647. https://doi.org/10.3390/rs14153647
APA StyleAtefi, M. R., & Miura, H. (2022). Detection of Flash Flood Inundated Areas Using Relative Difference in NDVI from Sentinel-2 Images: A Case Study of the August 2020 Event in Charikar, Afghanistan. Remote Sensing, 14(15), 3647. https://doi.org/10.3390/rs14153647