
A Novel Weakly Supervised Remote Sensing Landslide Semantic Segmentation Method: Combining CAM and cycleGAN Algorithms


 ,
,  ,
,
Abstract
:
1. Introduction
- (1)
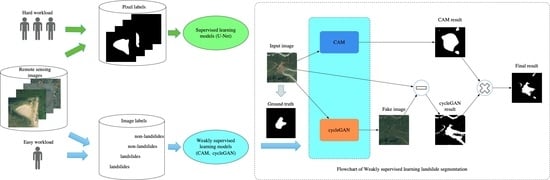
- Proposing a cycleGAN-based method for the weakly supervised training of image-level labeled remote sensing landslide images, and achieving the fine segmentation of landslide regions;
- (2)
- Combining the CAM and cycleGAN methods to improve the segmentation accuracy of weakly supervised learning algorithms on remote sensing landslide images.
2. Dataset
2.1. Data Sources
2.2. Pixel-Level Annotation and Image-Level Annotation
3. Method
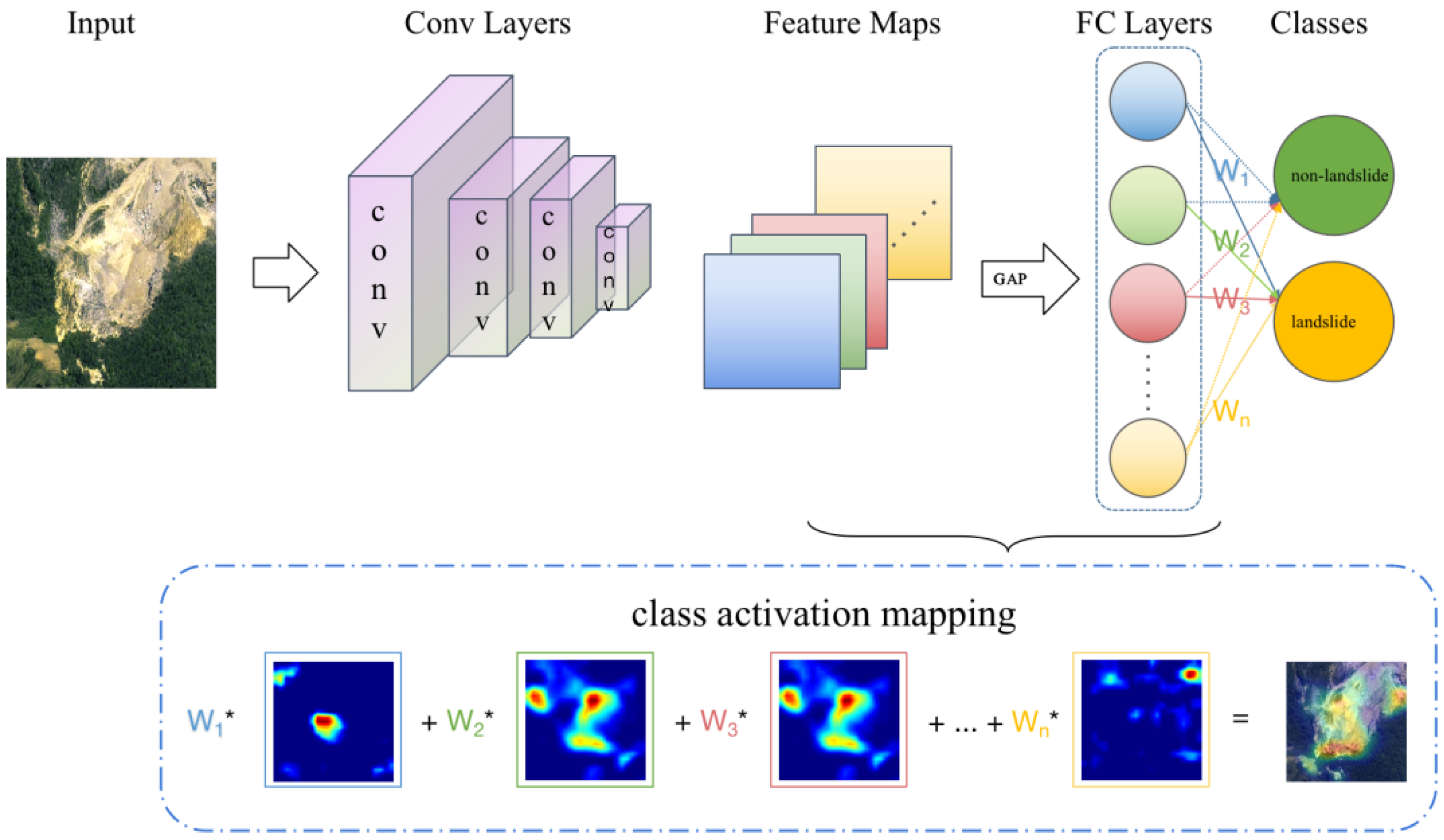
3.1. CAM-Based Weakly Supervised Algorithm
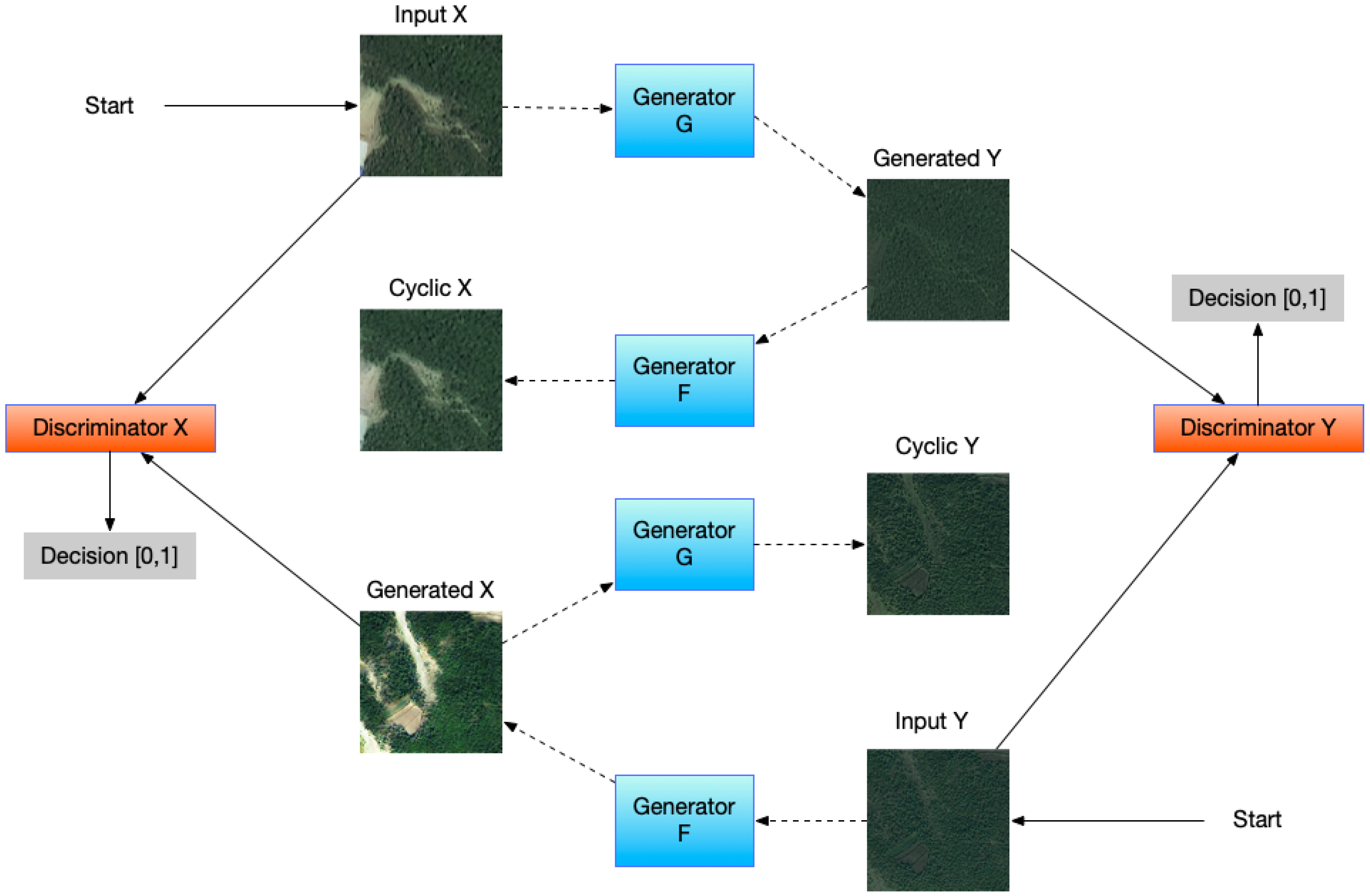
3.2. cycleGAN-Based Weakly Supervised Algorithm
3.2.1. Generate Images before Landslides with cycleGAN
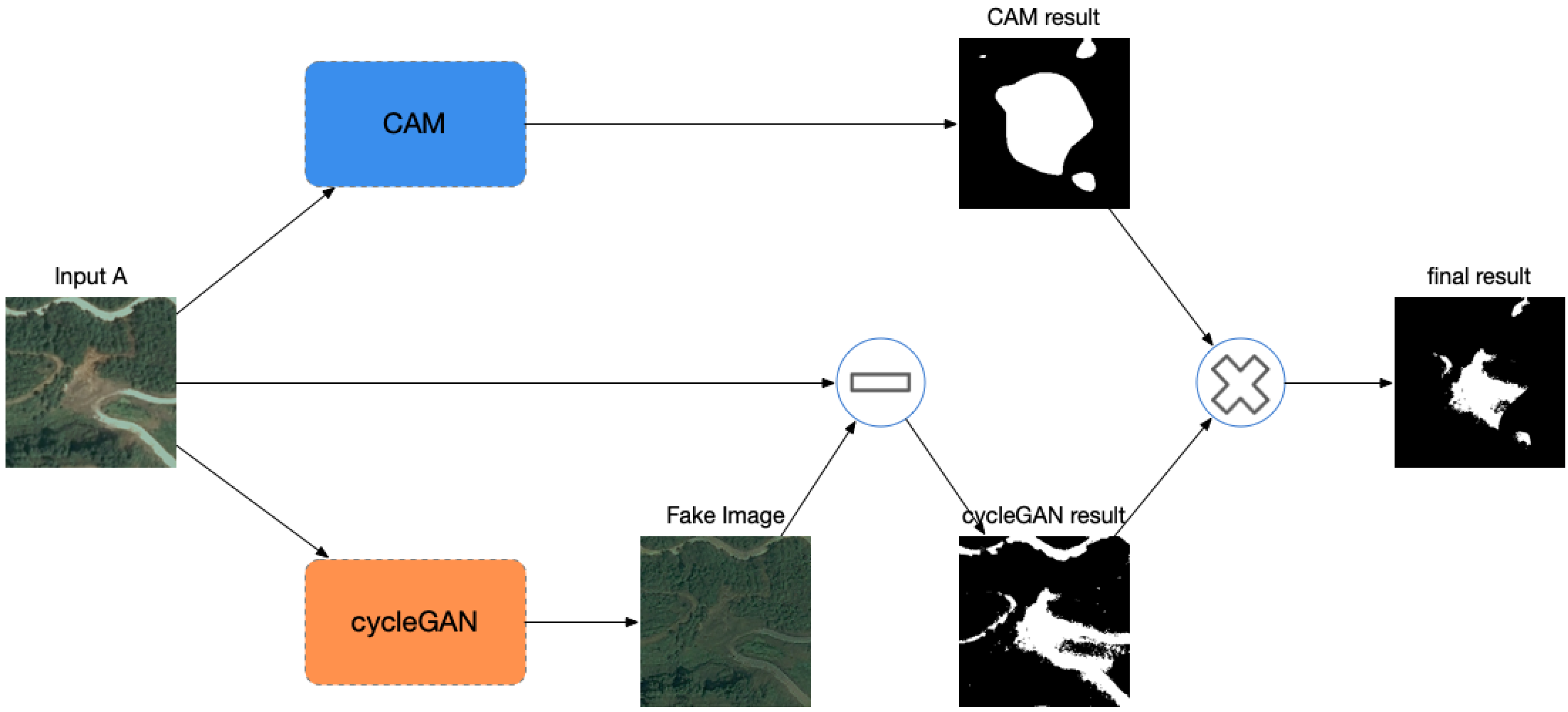
3.2.2. Difference Method to Obtain Landslide Area
3.3. Method of Combining cycleGAN and CAM
4. Results and Discussion
4.1. Model Evaluation Method
4.2. Evaluation Results
4.2.1. CAM Results Analysis
4.2.2. cycleGAN Results Analysis
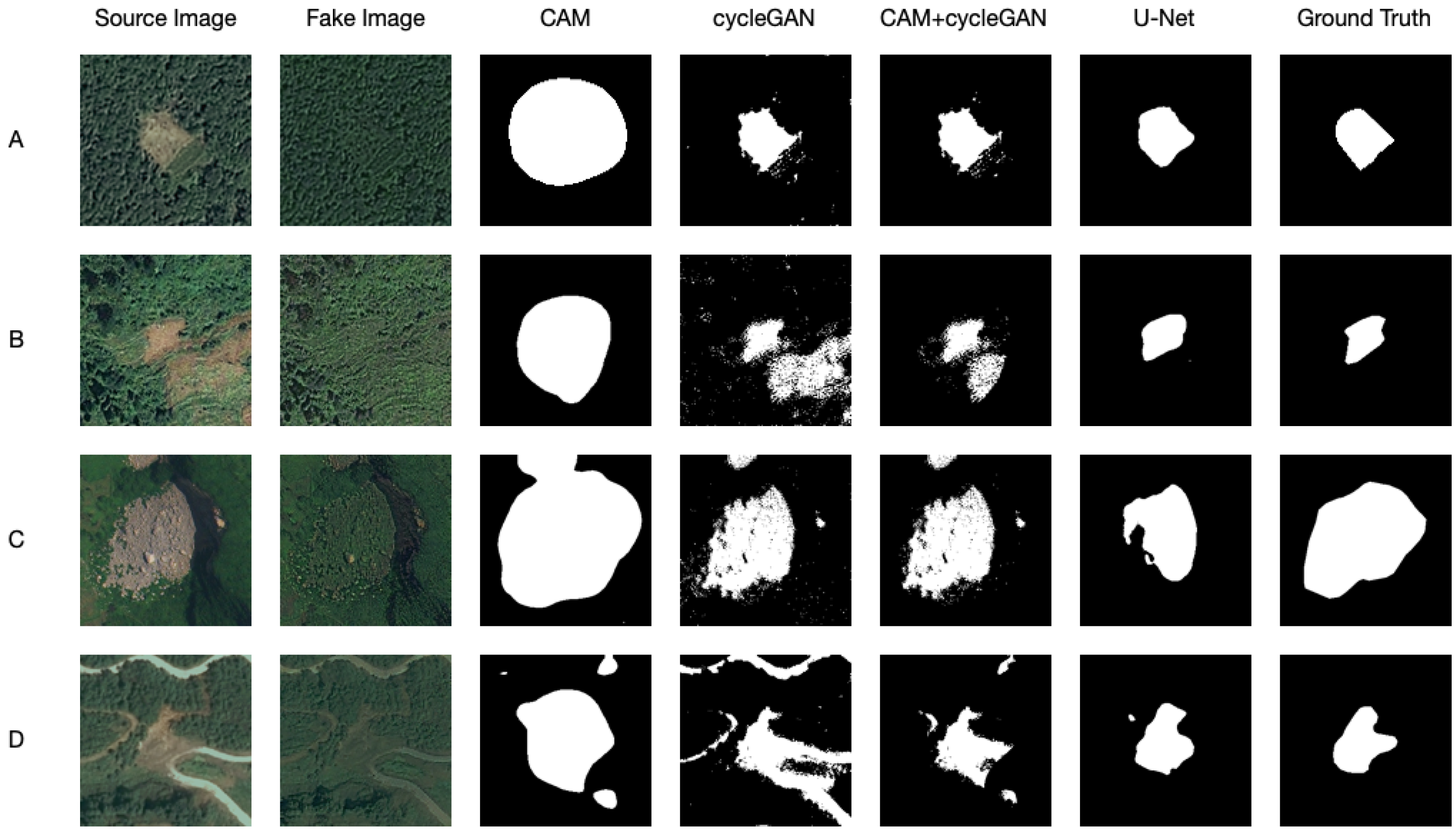
4.2.3. Analysis of Combined Method Results
4.2.4. Comparison of Weakly Supervised Method and Supervised Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lukić, T.; Bjelajac, D.; Fitzsimmons, K.E.; Marković, S.B.; Basarin, B.; Mlađan, D.; Micić, T.; Schaetzl, R.J.; Gavrilov, M.B.; Milanović, M.; et al. Factors Triggering Landslide Occurrence on the Zemun Loess Plateau, Belgrade Area, Serbia. Environ. Earth Sci. 2018, 77, 519. [Google Scholar] [CrossRef]
- Mohan, A.; Singh, A.K.; Kumar, B.; Dwivedi, R. Review on Remote Sensing Methods for Landslide Detection Using Machine and Deep Learning. Trans. Emerg. Telecommun. Technol. 2021, 32, e3998. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. Imagenet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 248–255. [Google Scholar]
- Zhong, C.; Liu, Y.; Gao, P.; Chen, W.; Li, H.; Hou, Y.; Nuremanguli, T.; Ma, H. Landslide Mapping with Remote Sensing: Challenges and Opportunities. Int. J. Remote Sens. 2020, 41, 1555–1581. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B. Landslide Detection Using Residual Networks and the Fusion of Spectral and Topographic Information. IEEE Access 2019, 7, 114363–114373. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Ouyang, C.; Zhang, F.; Ma, J. Automated Landslides Detection for Mountain Cities Using Multi-Temporal Remote Sensing Imagery. Sensors 2018, 18, 821. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, L.; Li, J.; Duan, P.; Wang, M. A Small Attentional YOLO Model for Landslide Detection from Satellite Remote Sensing Images. Landslides 2021, 18, 2751–2765. [Google Scholar] [CrossRef]
- Soares, L.P.; Dias, H.C.; Grohmann, C.H. Landslide Segmentation with U-Net: Evaluating Different Sampling Methods and Patch Sizes. arXiv 2020, arXiv:2007.06672. [Google Scholar]
- Du, B.; Zhao, Z.; Hu, X.; Wu, G.; Han, L.; Sun, L.; Gao, Q. Landslide Susceptibility Prediction Based on Image Semantic Segmentation. Comput. Geosci. 2021, 155, 104860. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. Mapping Landslides on EO Data: Performance of Deep Learning Models vs. Traditional Machine Learning Models. Remote Sens. 2020, 12, 346. [Google Scholar] [CrossRef] [Green Version]
- Bo, Y.A.; Fang, C.; Chong, X.D. Landslide Detection Based on Contour-Based Deep Learning Framework in Case of National Scale of Nepal in 2015. Comput. Geosci. 2020, 135, 104388. [Google Scholar]
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide Detection from an Open Satellite Imagery and Digital Elevation Model Dataset Using Attention Boosted Convolutional Neural Networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Su, Q.; Zhang, X.; Xiao, P.; Li, Z.; Wang, W. Which CAM Is Better for Extracting Geographic Objects? A Perspective from Principles and Experiments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 5623–5635. [Google Scholar] [CrossRef]
- Feng, Z.; Zhu, M.; Stanković, L.; Ji, H. Self-Matching CAM: A Novel Accurate Visual Explanation of CNNs for SAR Image Interpretation. Remote Sens. 2021, 13, 1772. [Google Scholar] [CrossRef]
- Park, M.; Tran, D.Q.; Jung, D.; Park, S. Wildfire-Detection Method Using Densenet and Cyclegan Data Augmentation-Based Remote Camera Imagery. Remote Sens. 2020, 12, 3715. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft Coco: Common Objects in Context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning Deep Features for Discriminative Localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2921–2929. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. Adv. Neural Inf. Process Syst. 2014, 27, 2672–2680. [Google Scholar]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Isola, P.; Zhu, J.-Y.; Zhou, T.; Efros, A.A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.; Villena-Martinez, V.; Garcia-Rodriguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Precision | Recall | mIOU | FPR | |
|---|---|---|---|---|---|
| weakly supervised learning | CAM | 0.692 | 0.593 | 0.159 | 0.054 |
| cycleGAN | 0.845 | 0.404 | 0.184 | 0.042 | |
| CAM + cycleGAN | 0.924 | 0.383 | 0.237 | 0.004 | |
| supervised learning | U-Net | 0.955 | 0.555 | 0.408 | 0.011 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Wang, H.; Yang, R.; Yao, G.; Xu, Q.; Zhang, X. A Novel Weakly Supervised Remote Sensing Landslide Semantic Segmentation Method: Combining CAM and cycleGAN Algorithms. Remote Sens. 2022, 14, 3650. https://doi.org/10.3390/rs14153650
Zhou Y, Wang H, Yang R, Yao G, Xu Q, Zhang X. A Novel Weakly Supervised Remote Sensing Landslide Semantic Segmentation Method: Combining CAM and cycleGAN Algorithms. Remote Sensing. 2022; 14(15):3650. https://doi.org/10.3390/rs14153650
Chicago/Turabian StyleZhou, Yongxiu, Honghui Wang, Ronghao Yang, Guangle Yao, Qiang Xu, and Xiaojuan Zhang. 2022. "A Novel Weakly Supervised Remote Sensing Landslide Semantic Segmentation Method: Combining CAM and cycleGAN Algorithms" Remote Sensing 14, no. 15: 3650. https://doi.org/10.3390/rs14153650
APA StyleZhou, Y., Wang, H., Yang, R., Yao, G., Xu, Q., & Zhang, X. (2022). A Novel Weakly Supervised Remote Sensing Landslide Semantic Segmentation Method: Combining CAM and cycleGAN Algorithms. Remote Sensing, 14(15), 3650. https://doi.org/10.3390/rs14153650