
Ground Moving Target Detection and Estimation for Airborne Multichannel Radar Based on Coherent Difference Processing

 ,
,  ,
,
Abstract
:
1. Introduction
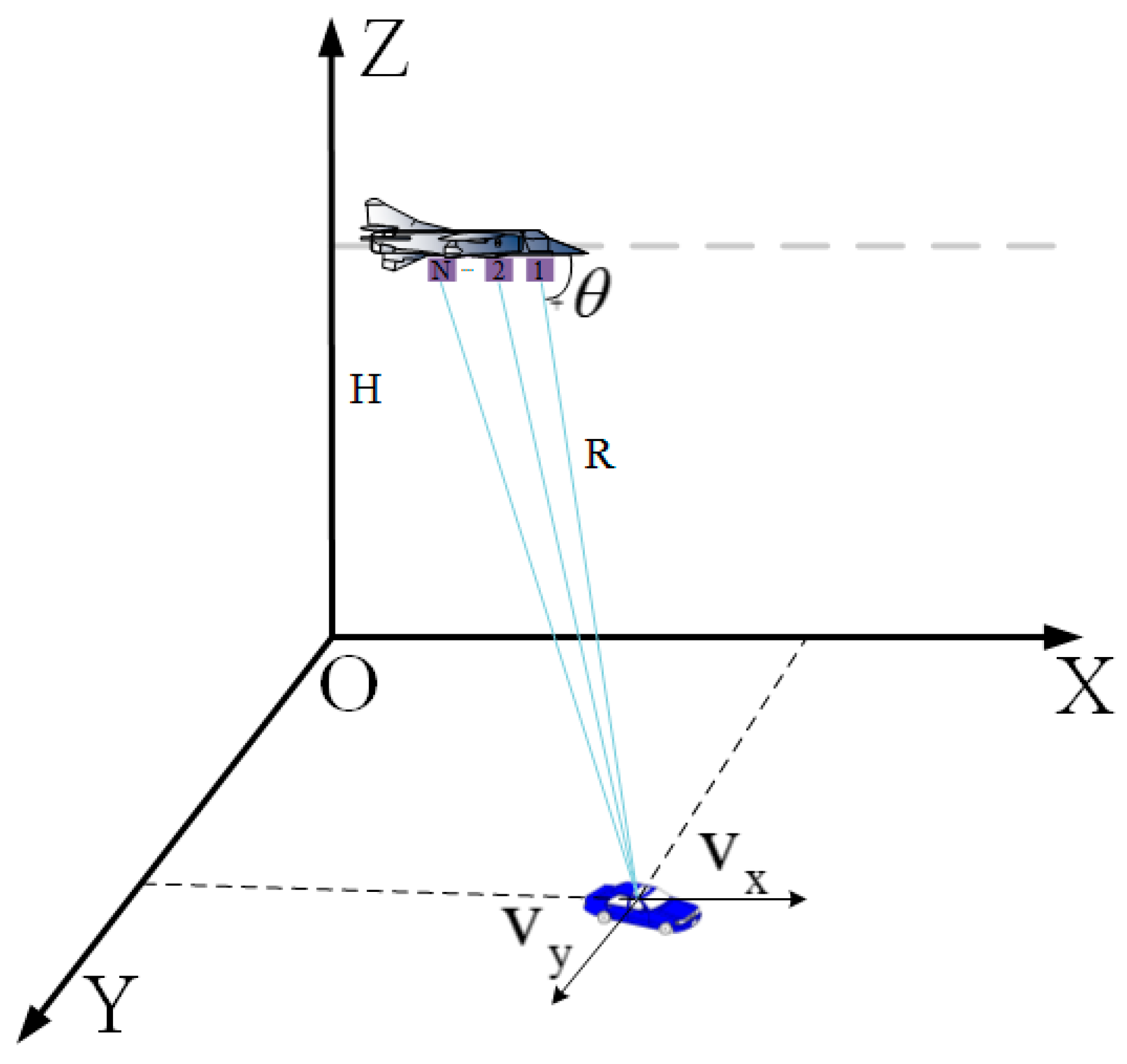
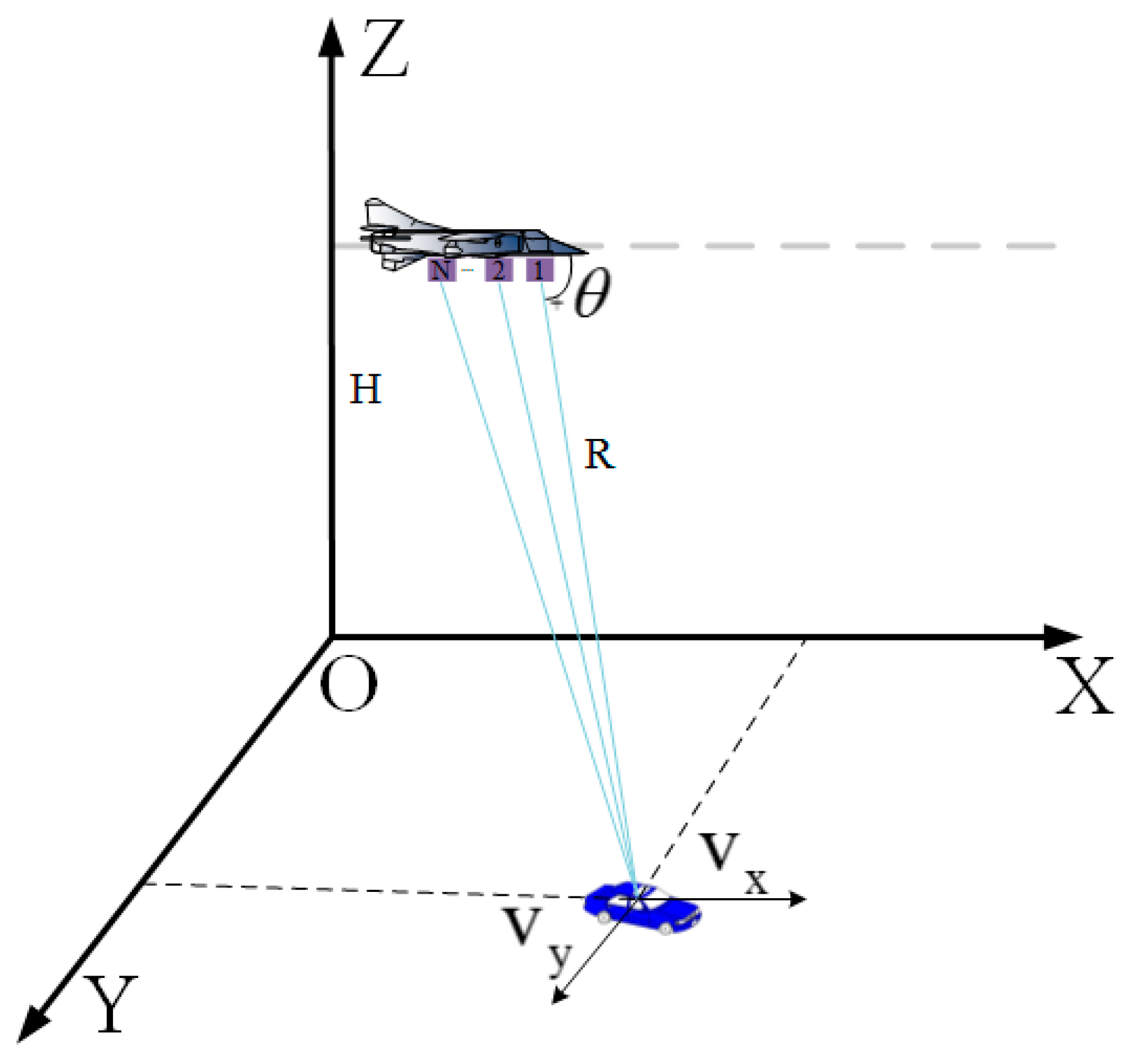
2. Multichannel Signal Model
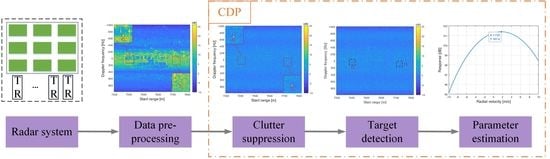
3. Proposed Method for Target Detection and Estimation
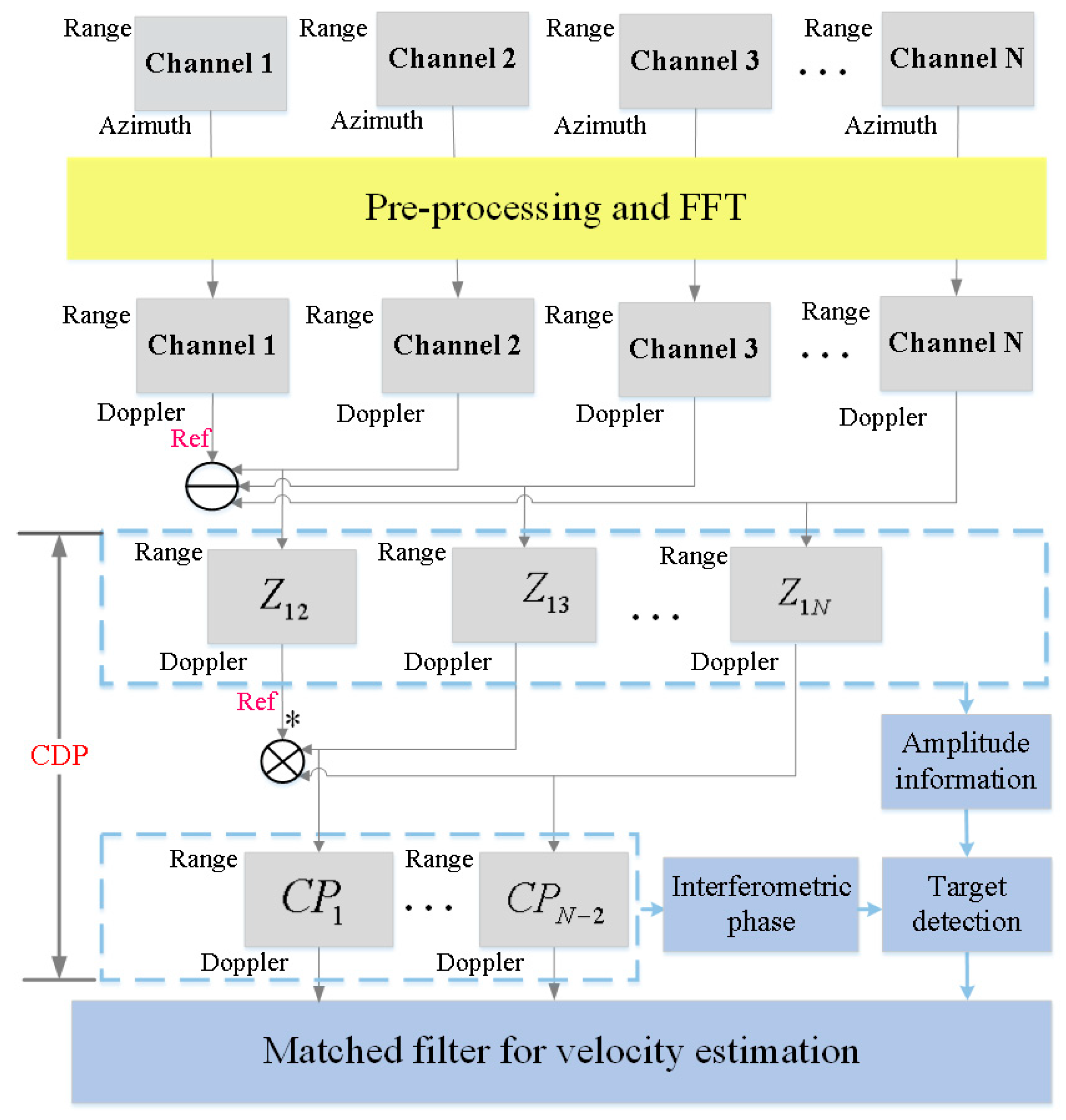
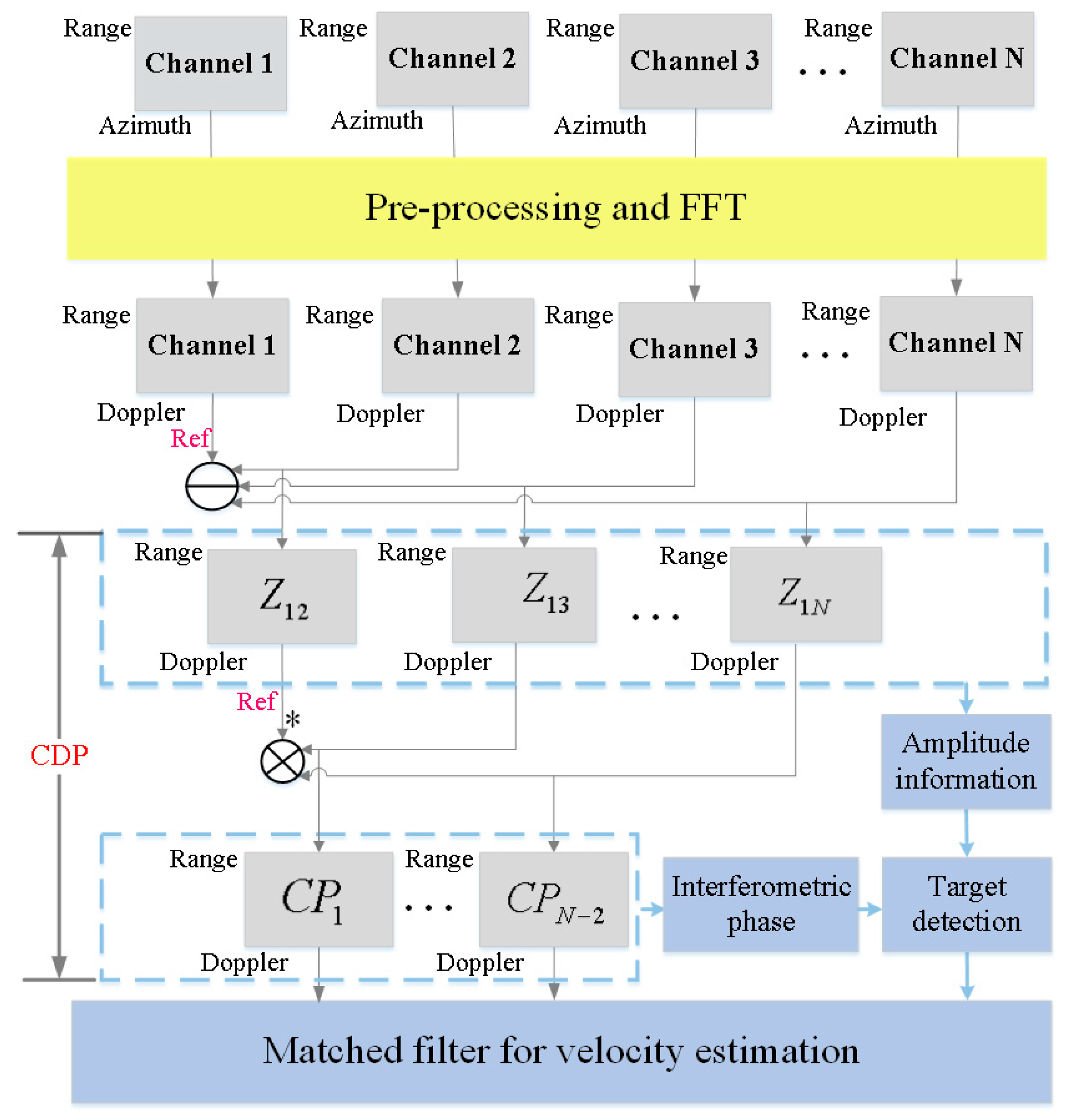
3.1. Proposed Method
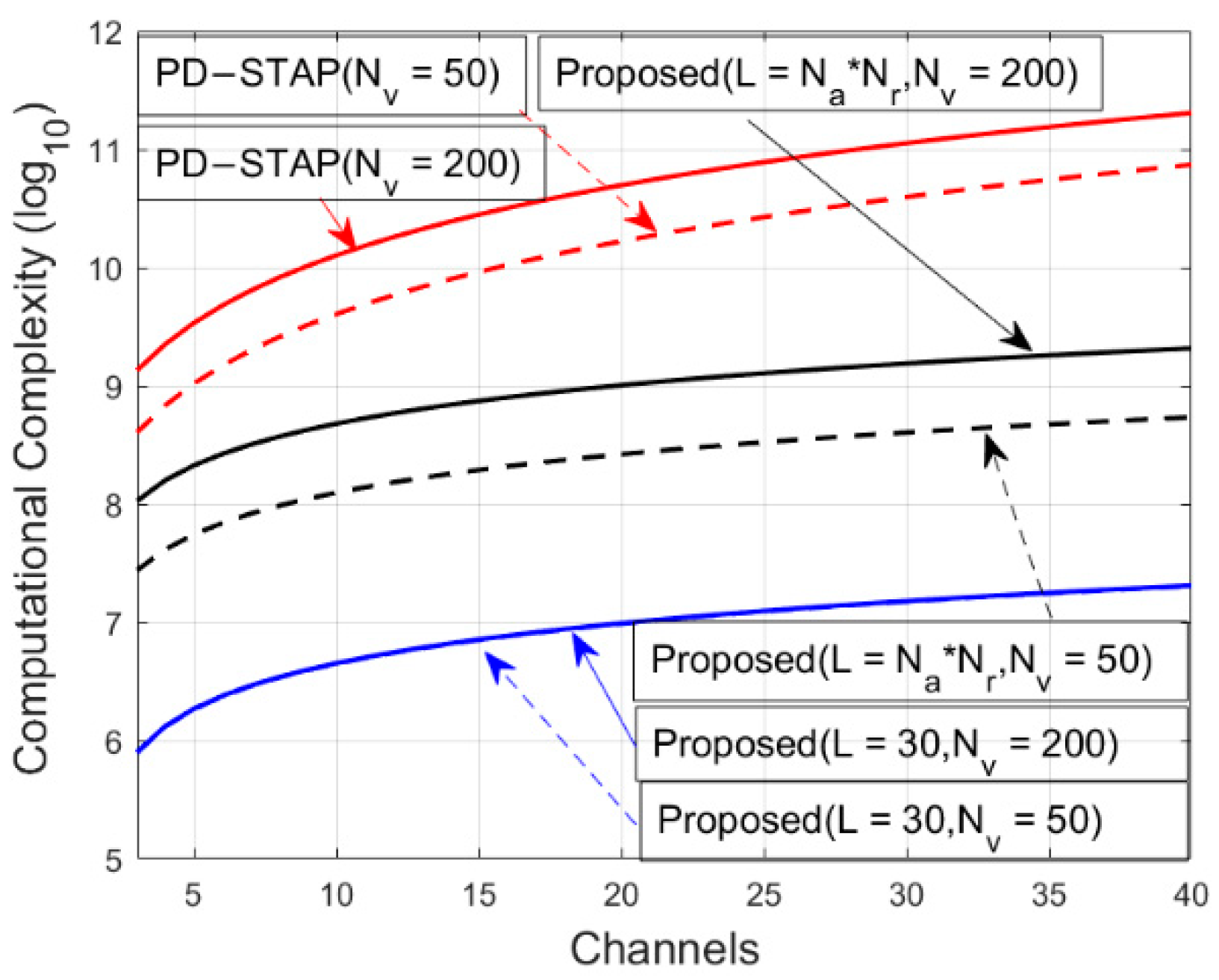
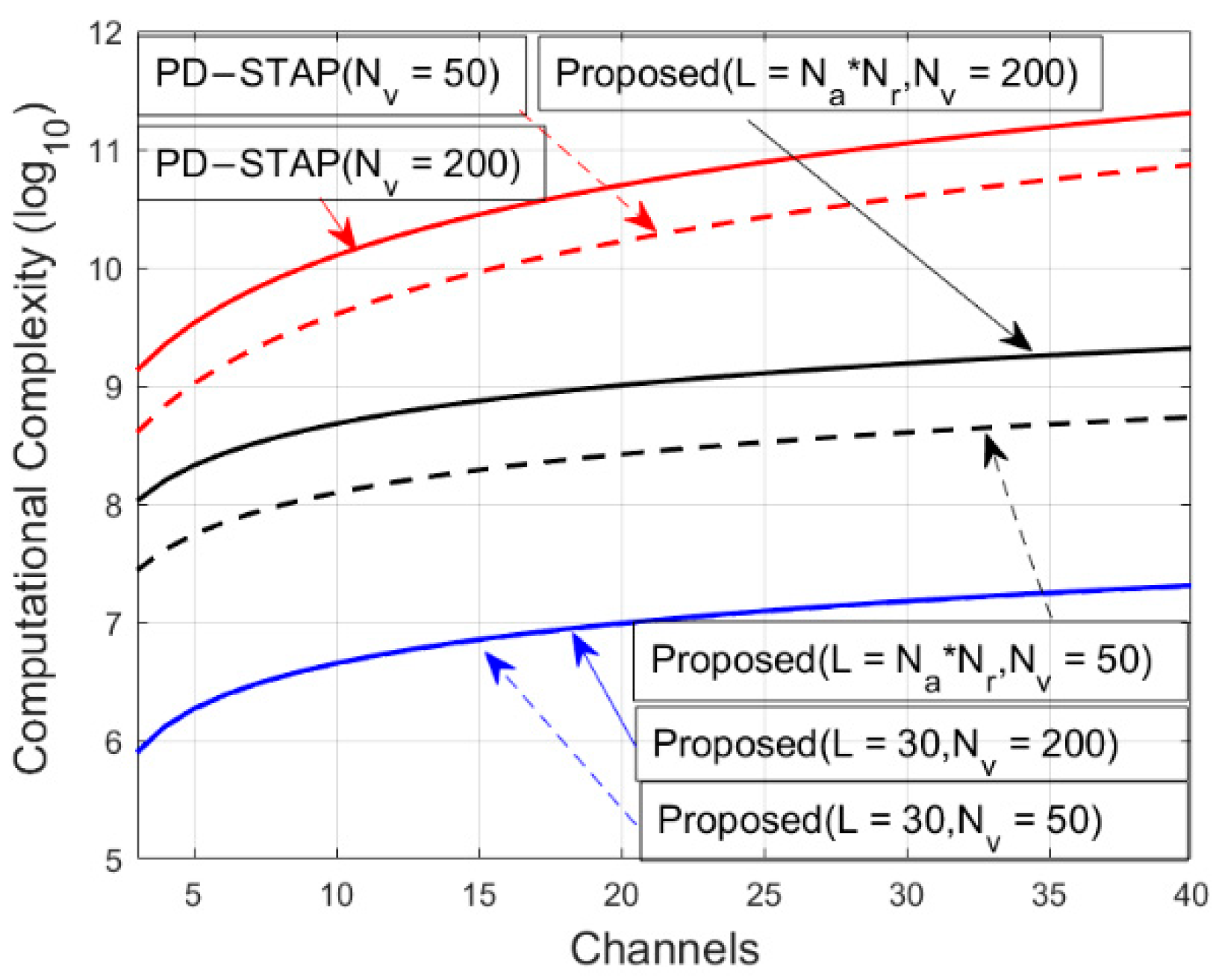
3.2. Computational Complexity
4. Experimental Results
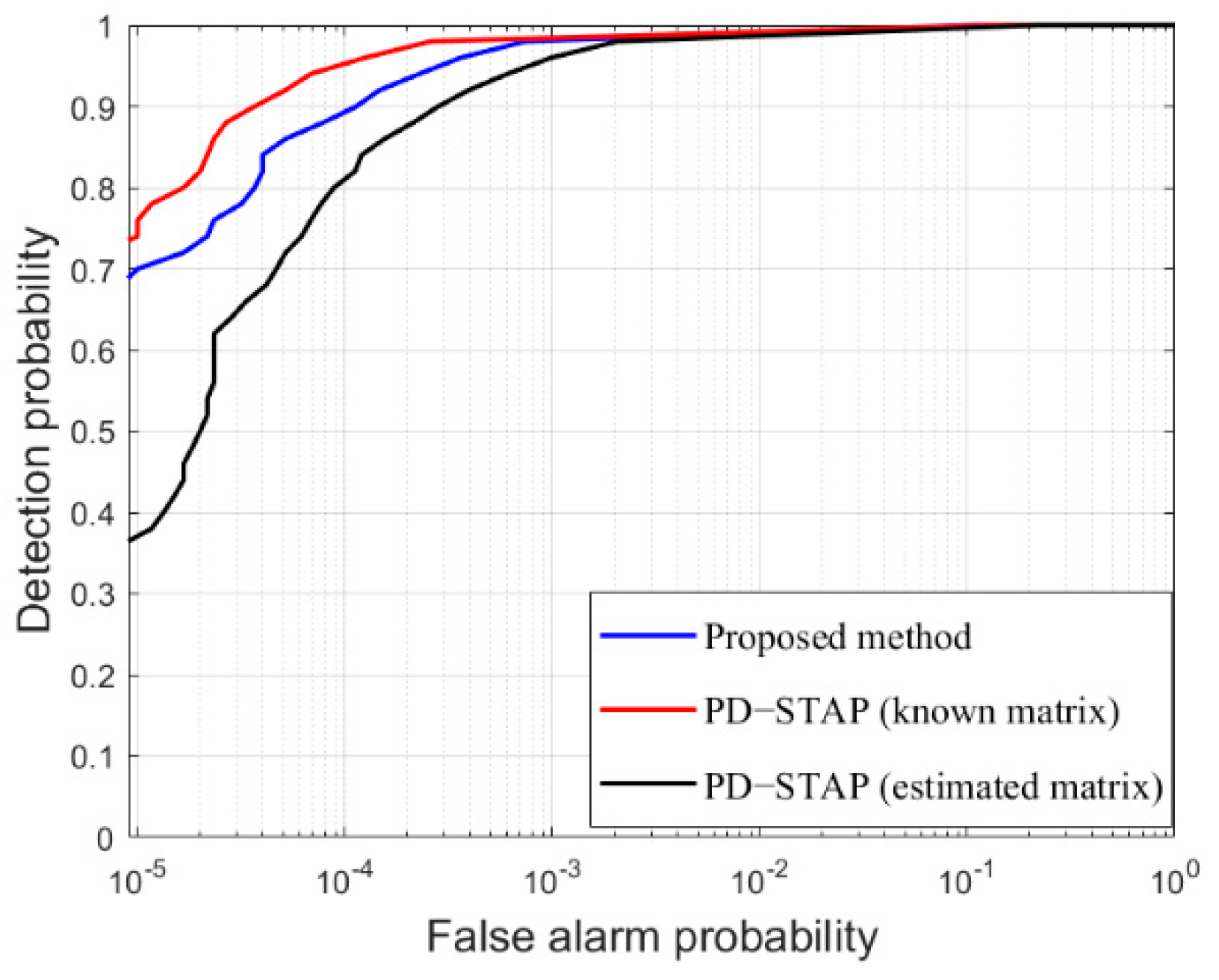
4.1. Performance Analysis
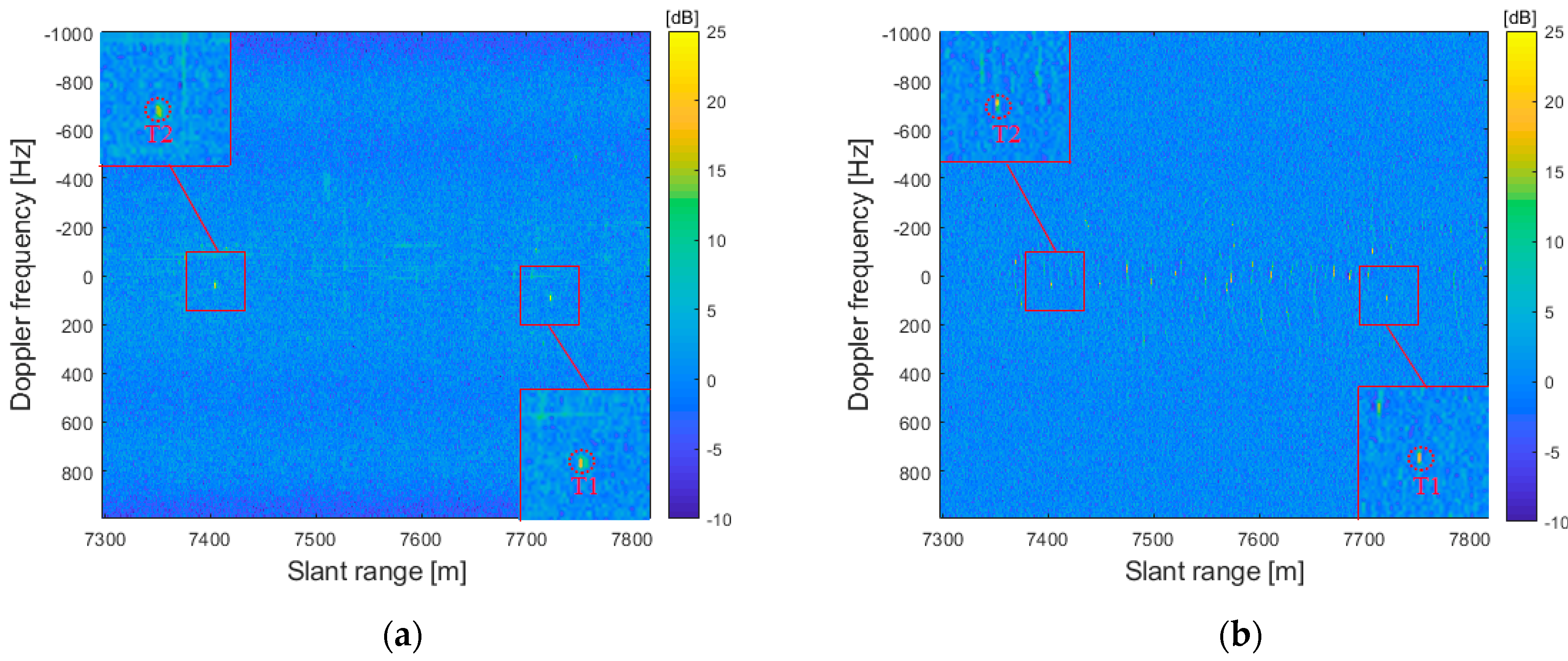
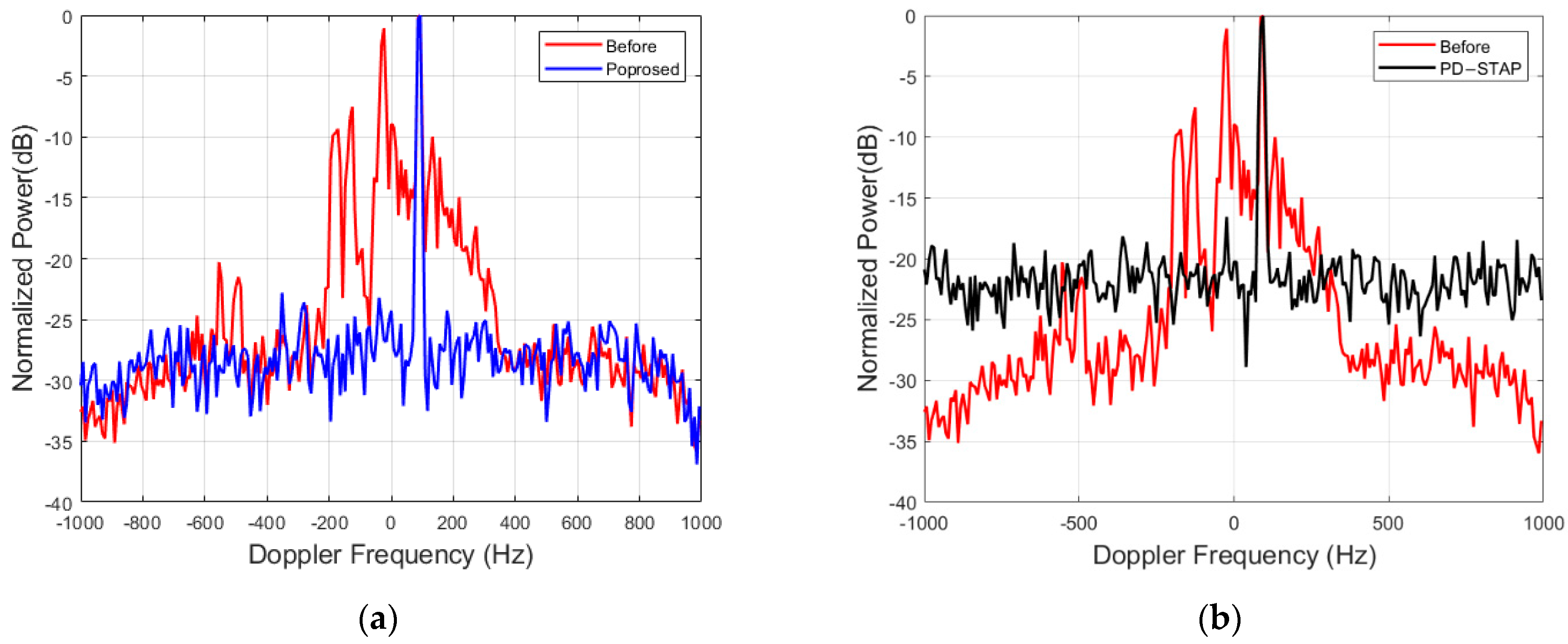
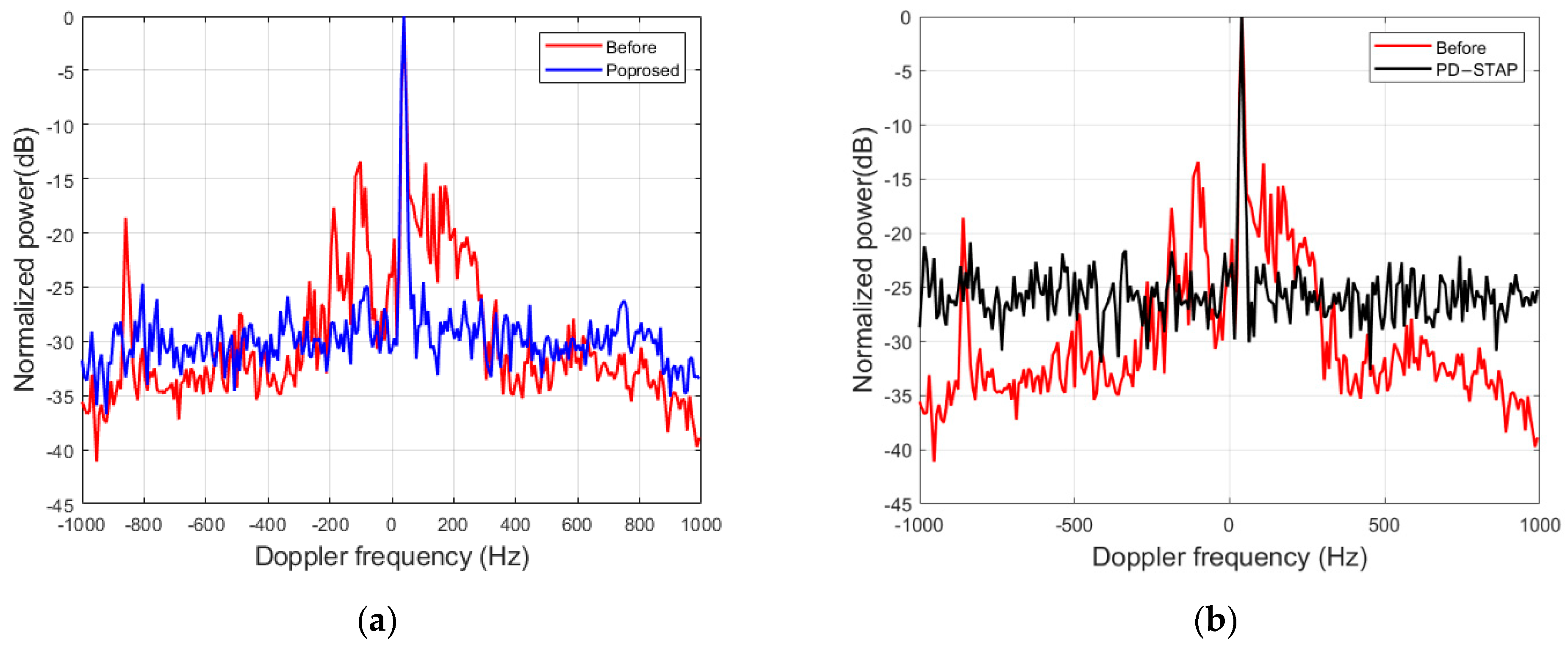
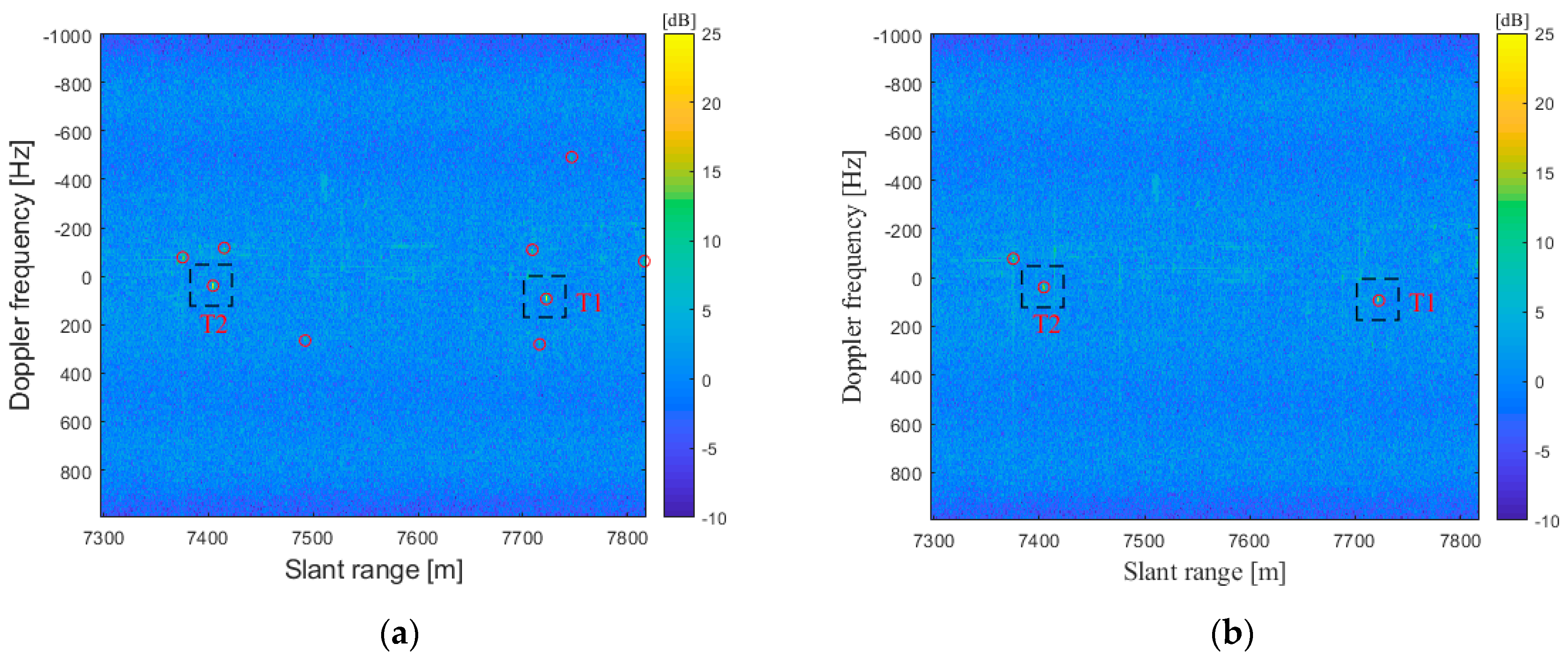
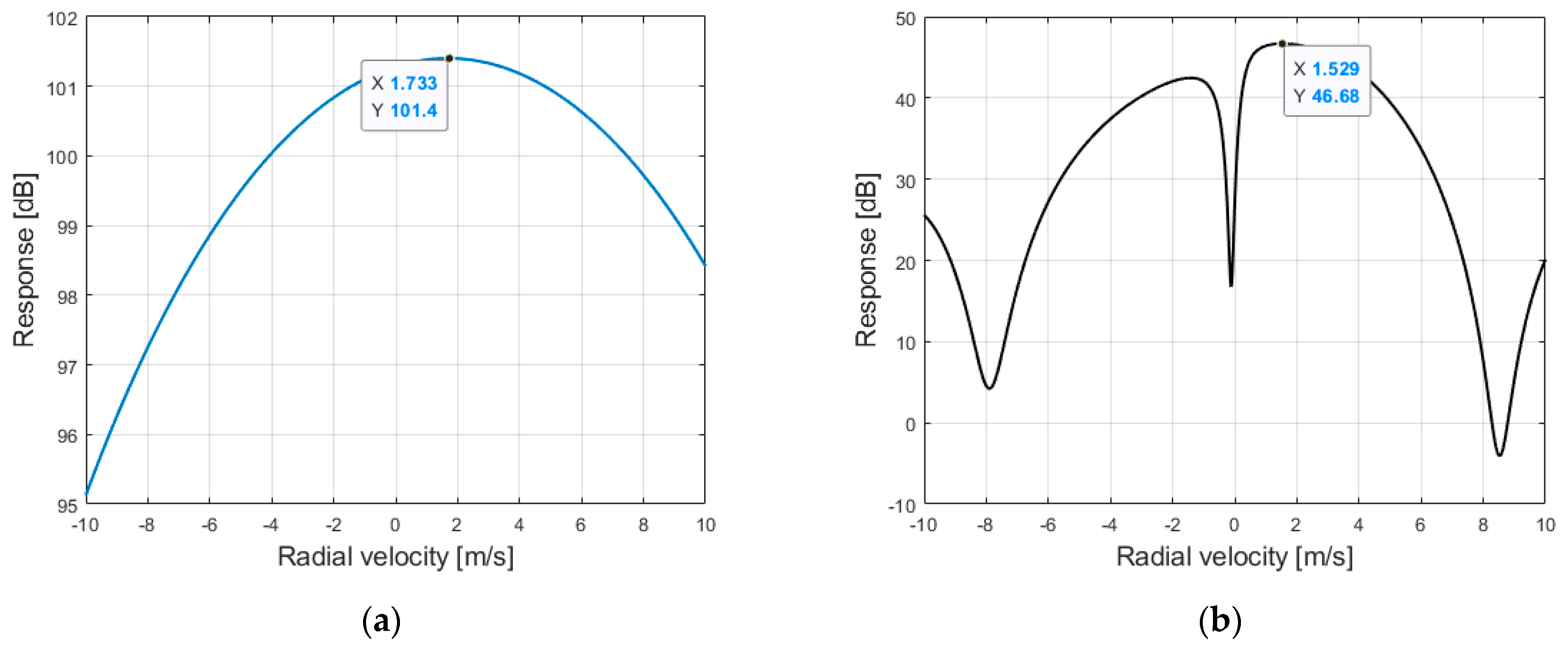
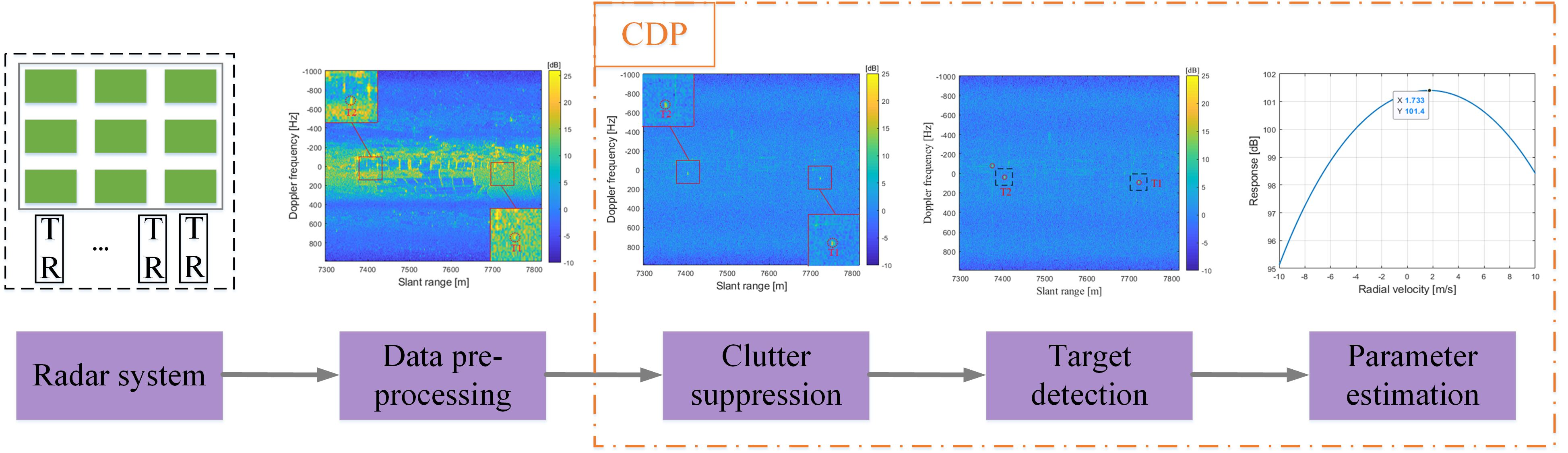
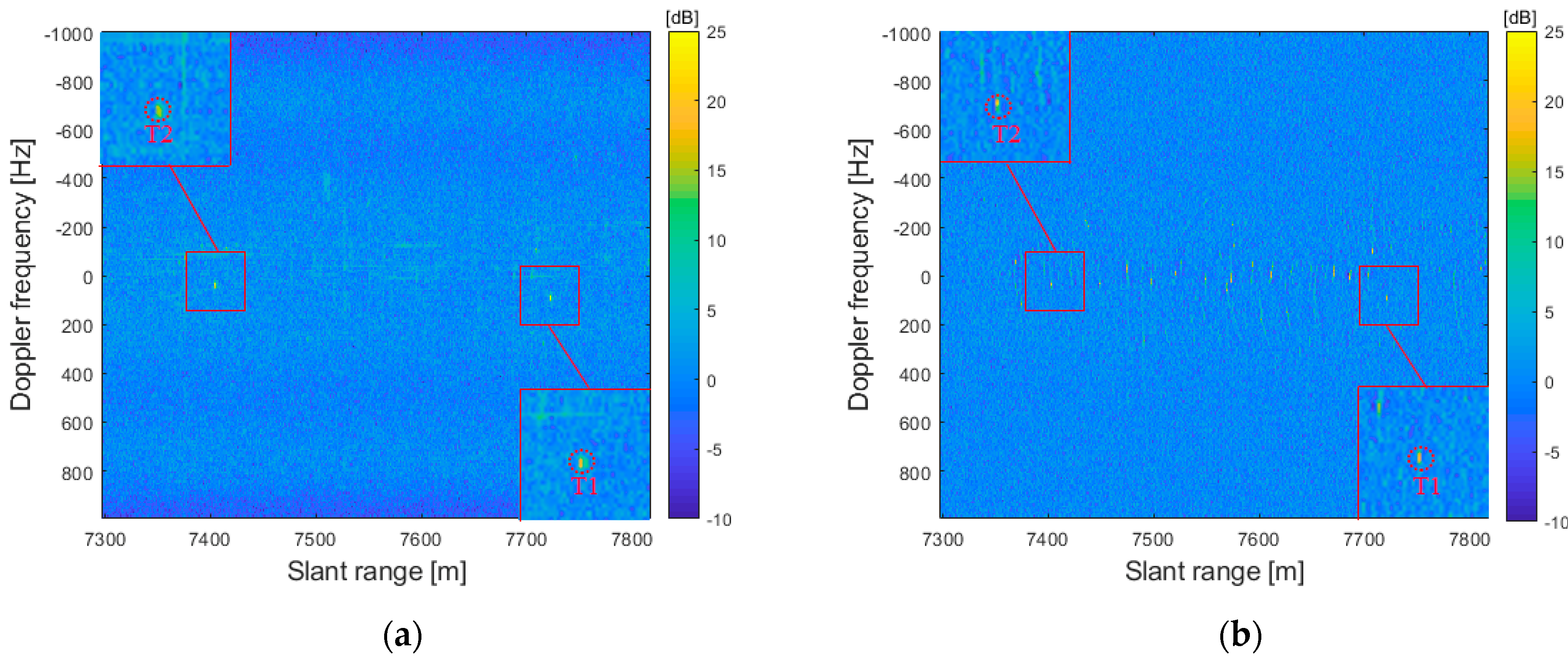
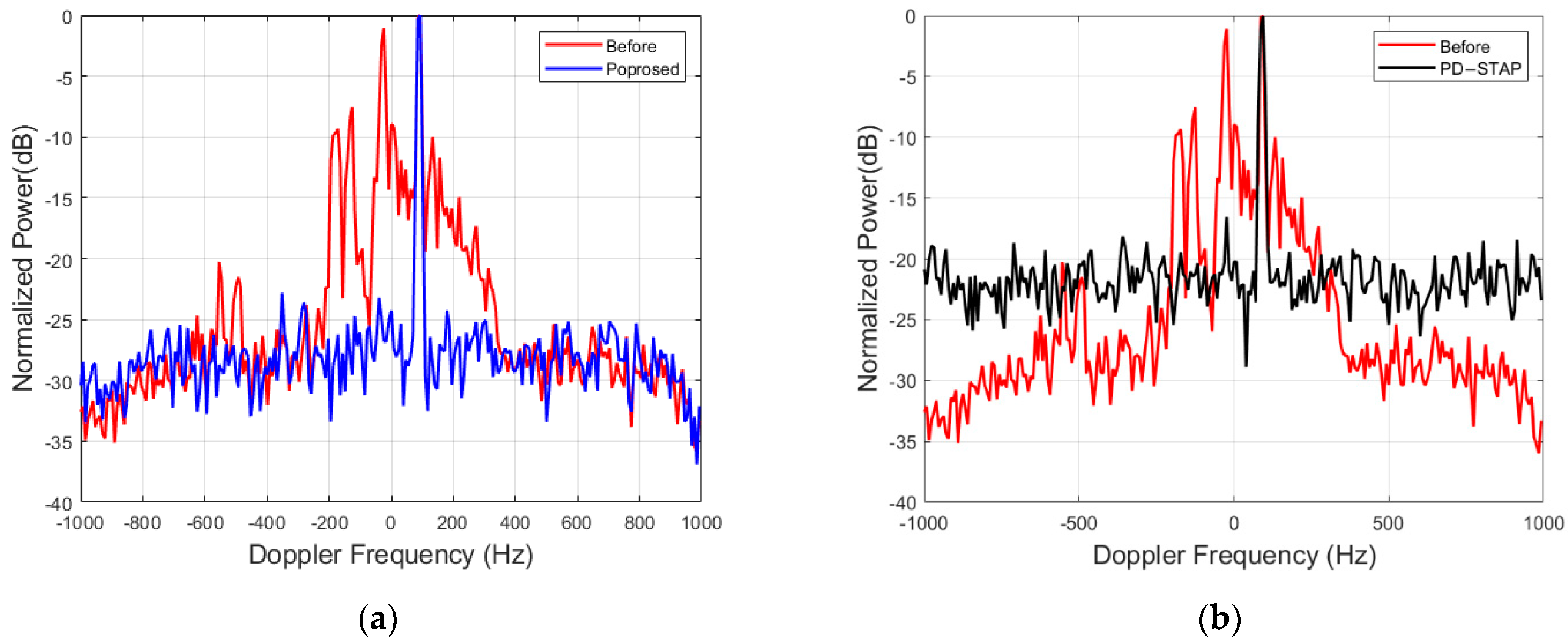
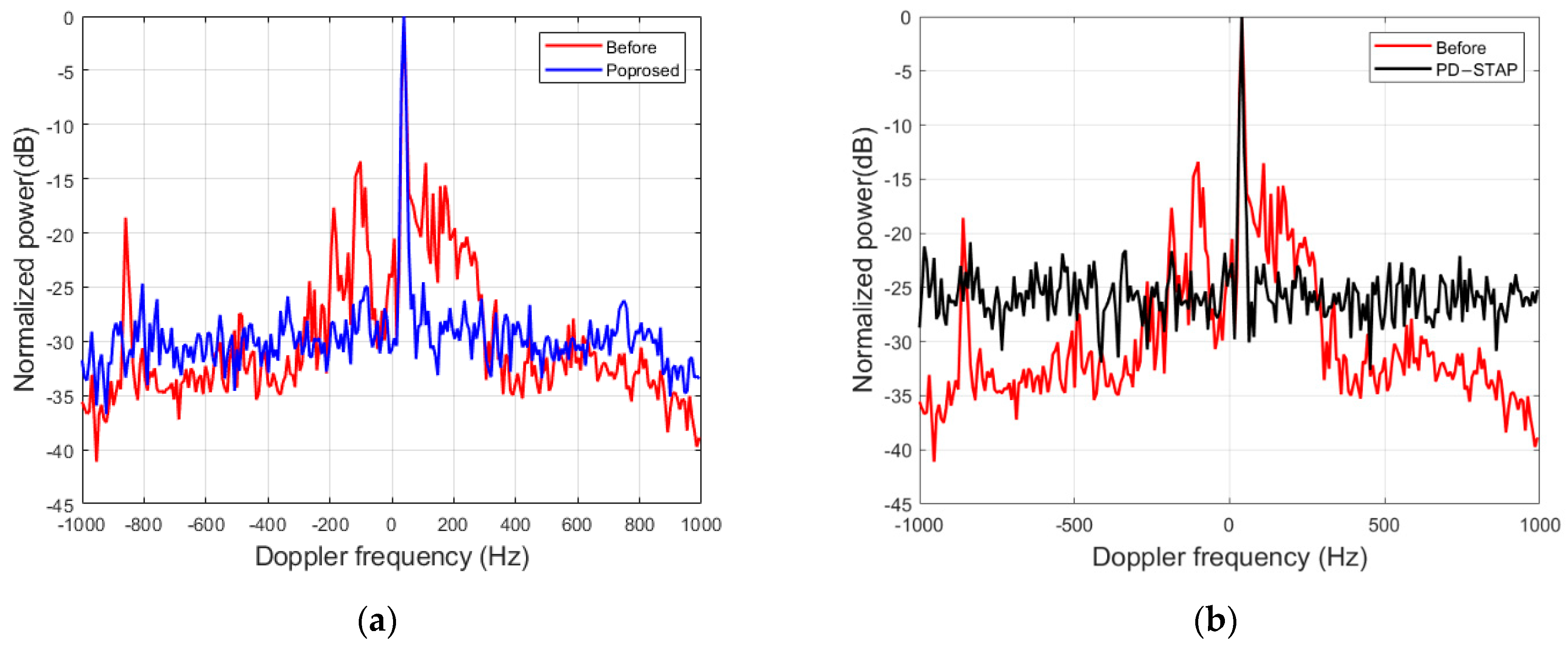
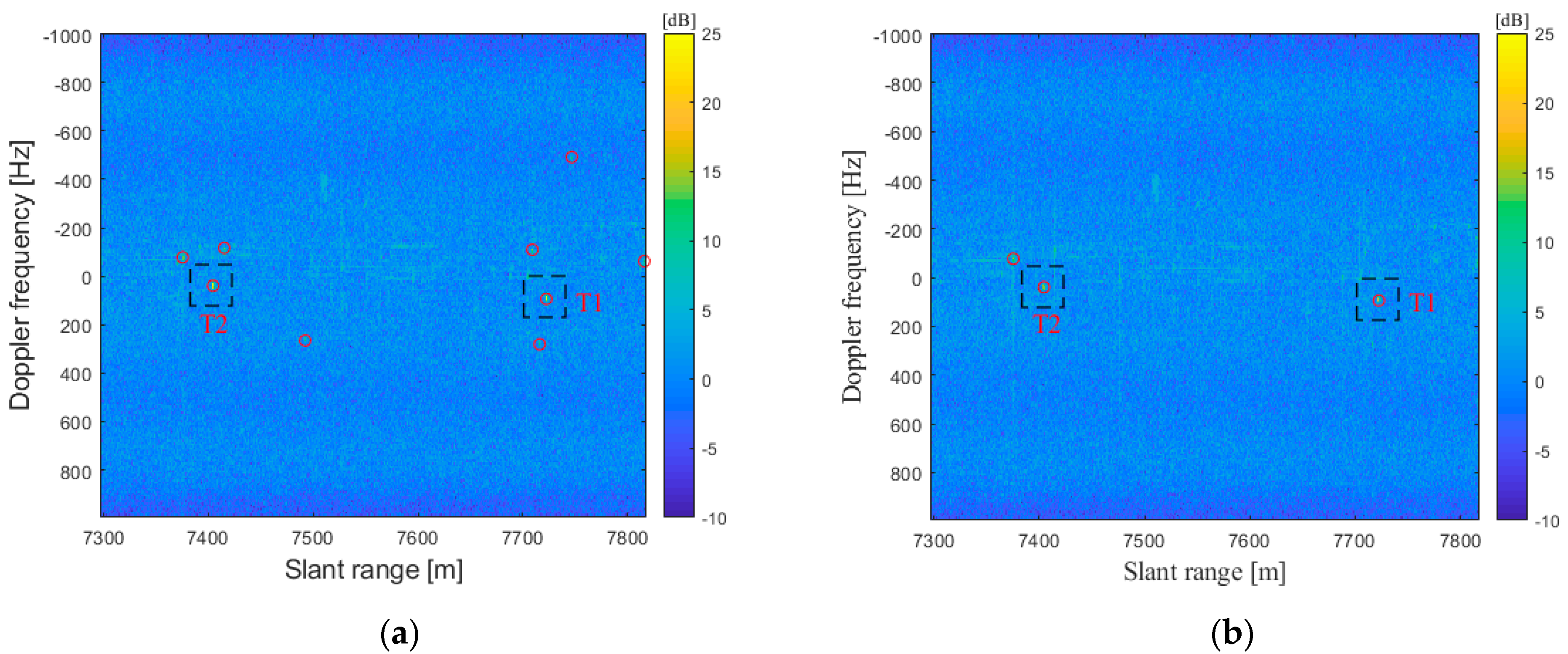
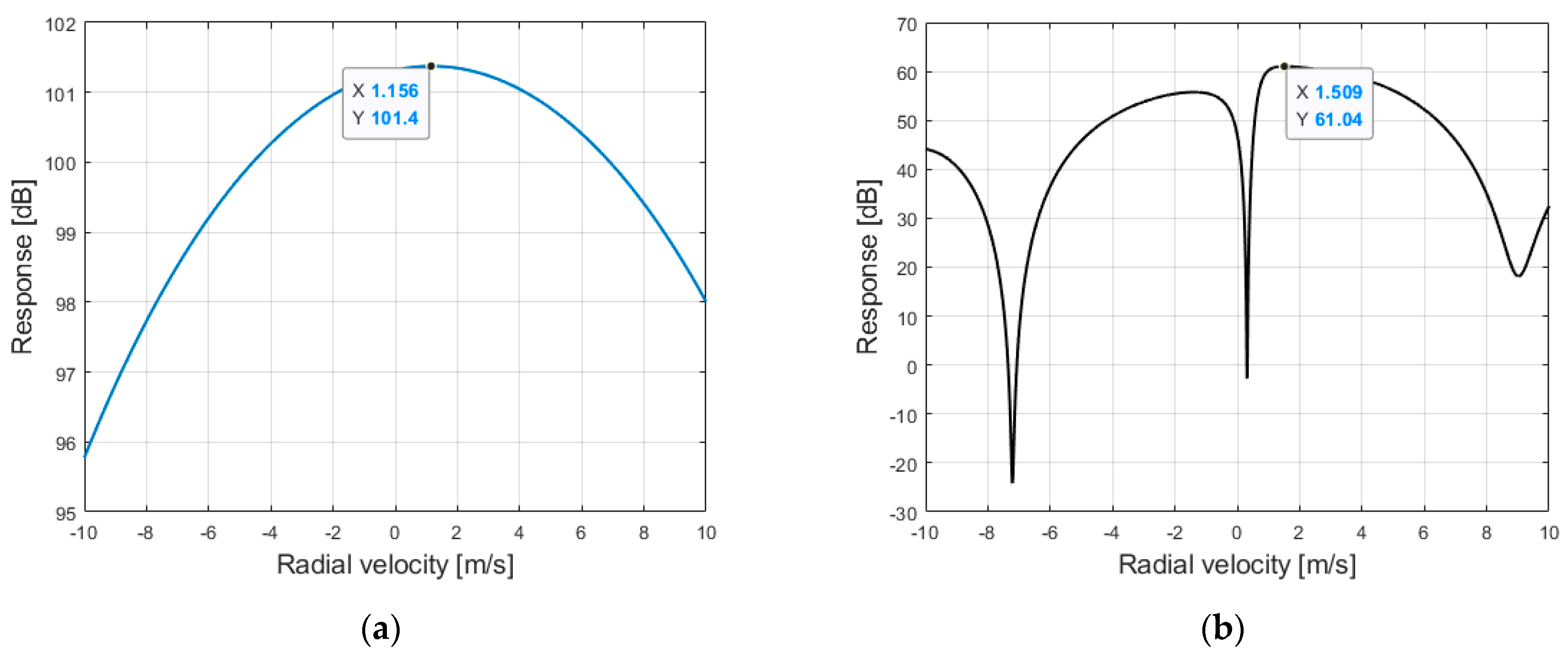
4.2. Real Data of Airborne Multichannel Radar
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Budillon, A.; Gierull, C.H.; Pascazio, V.; Schirinzi, G. Along-Track Interferometric SAR Systems for Ground-Moving Target Indication: Achievements, Potentials, and Outlook. IEEE Geosci. Remote Sens. Mag. 2020, 8, 46–63. [Google Scholar] [CrossRef]
- Suwa, K.; Yamamoto, K.; Tsuchida, M.; Nakamura, S.; Wakayama, T.; Hara, T. Image-Based Target Detection and Radial Velocity Estimation Methods for Multichannel SAR-GMTI. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1325–1338. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Klare, J.; Brenner, A.R.; Ender, J.H.G. Wide-Area Traffic Monitoring With the SAR/GMTI System PAMIR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3019–3030. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, Y.; Wu, H.; Wang, H. Heterogeneous Clutter Suppression for Airborne Radar STAP Based on Matrix Manifolds. Remote Sens. 2021, 13, 3195. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Dong, Q.; Wang, Y.; Wang, Z.; Xu, W.; Wang, R. A General Framework for Slow and Weak Range-Spread Ground Moving Target Indication Using Airborne Multichannel High-Resolution Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5113616. [Google Scholar] [CrossRef]
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- Lightstone, L.; Faubert, D.; Rempel, G. Multiple Phase Centre DPCA for Airborne Radar. In Proceedings of the 1991 IEEE National Radar Conference, Los Angeles, CA, USA, 12–13 March 1991; pp. 36–40. [Google Scholar]
- Liu, B.; Yin, K.; Li, Y.; Shen, F.; Bao, Z. An Improvement in Multichannel SAR-GMTI Detection in Heterogeneous Environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 810–827. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.L.; Xing, M.; Sun, G.-C.; Shuangxi, Z.; Xiang, J. A Novel Two-Step Scheme Based on joint GO-DPCA and Local STAP in Image Domain for Multichannel SAR-GMTI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8259–8272. [Google Scholar] [CrossRef]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing, London, UK, 6 April 1998. [Google Scholar]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR Adaptive Matched-Filter Detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- da Silva, A.B.C.; Baumgartner, S.V.; Krieger, G. Training Data Selection and Update Strategies for Airborne Post-Doppler STAP. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5626–5641. [Google Scholar] [CrossRef] [Green Version]
- Yadin, E. Evaluation of noise and clutter induced relocation errors in SAR MTI. In Proceedings of the Proceedings International Radar Conference, Alexandria, VA, USA, 8–11 May 1995; pp. 650–655. [Google Scholar]
- Kirk, J.C. Motion Compensation for Synthetic Aperture Radar. IEEE Trans. Aerosp. Electron. Syst. 1975, AES-11, 338–348. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. Coherent Integration With Range Migration Using Keystone Formatting. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 863–868. [Google Scholar]
- da Silva, A.B.C.; Baumgartner, S.V.; de Almeida, F.Q.; Krieger, G. In-Flight Multichannel Calibration for Along-Track Interferometric Airborne Radar. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3104–3121. [Google Scholar] [CrossRef]
- Gierull, C.H.; Sikaneta, I.; Cerutti-Maori, D. Two-Step Detector for RADARSAT-2′s Experimental GMTI Mode. IEEE Trans. Geosci. Remote Sens. 2013, 51, 436–454. [Google Scholar] [CrossRef]
- da Silva, A.B.C.; Baumgartner, S.V. Novel post-Doppler STAP with a priori knowledge information for traffic monitoring applications: Basic idea and first results. Adv. Radio Sci. 2017, 15, 77–82. [Google Scholar] [CrossRef] [Green Version]
- Barbarossa, S.; Farina, A. Detection and imaging of moving objects with synthetic aperture radar. Part 2: Joint time-frequency analysis by Wigner-Ville distribution. IEE Proc. F Radar Signal Process. 1992, 139, 89–97. [Google Scholar] [CrossRef]
- Cristallini, D.; Pastina, D.; Colone, F.; Lombardo, P. Efficient Detection and Imaging of Moving Targets in SAR Images Based on Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2403–2416. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Himed, B. A Parametric Moving Target Detector for Distributed MIMO Radar in Non-Homogeneous Environment. IEEE Trans. Signal Process. 2013, 61, 2282–2294. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Symbol | Value |
|---|---|---|
| Speed of light | c | 2.979 × 108 m/s |
| Center frequency | 10 GHz | |
| Bandwidth | 600 MHz | |
| Number of receive channels | n | 4 |
| Pulse repetition frequency | PRF | 2000 Hz |
| Antenna length | 0.38 m | |
| Altitude of the platform | H | 3600 m |
| Central incidence elevation angle | 63° | |
| Mean slant range | 6.8 km | |
| Platform velocity | 64 m/s |
| Target ID | True Velocity | Algorithm | Estimated Velocity | Velocity Error |
|---|---|---|---|---|
| T1 | 1.84 m/s | Proposed method | 1.73 m/s | 0.11 m/s |
| PD−STAP | 1.53 m/s | 0.31 m/s | ||
| T2 | 1.30 m/s | Proposed method | 1.16 m/s | 0.14 m/s |
| PD−STAP | 1.51 m/s | 0.21 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Wang, B.; Xiang, M.; Xu, W.; Wang, Z.; Wang, Y.; Sun, X. Ground Moving Target Detection and Estimation for Airborne Multichannel Radar Based on Coherent Difference Processing. Remote Sens. 2022, 14, 3325. https://doi.org/10.3390/rs14143325
Song C, Wang B, Xiang M, Xu W, Wang Z, Wang Y, Sun X. Ground Moving Target Detection and Estimation for Airborne Multichannel Radar Based on Coherent Difference Processing. Remote Sensing. 2022; 14(14):3325. https://doi.org/10.3390/rs14143325
Chicago/Turabian StyleSong, Chong, Bingnan Wang, Maosheng Xiang, Weidi Xu, Zhongbin Wang, Yachao Wang, and Xiaofan Sun. 2022. "Ground Moving Target Detection and Estimation for Airborne Multichannel Radar Based on Coherent Difference Processing" Remote Sensing 14, no. 14: 3325. https://doi.org/10.3390/rs14143325
APA StyleSong, C., Wang, B., Xiang, M., Xu, W., Wang, Z., Wang, Y., & Sun, X. (2022). Ground Moving Target Detection and Estimation for Airborne Multichannel Radar Based on Coherent Difference Processing. Remote Sensing, 14(14), 3325. https://doi.org/10.3390/rs14143325