
A Multi-Rotor Drone Micro-Motion Parameter Estimation Method Based on CVMD and SVD


Abstract
:
1. Introduction
2. Analysis of Flickering Mechanism of Multi-Rotor Drone
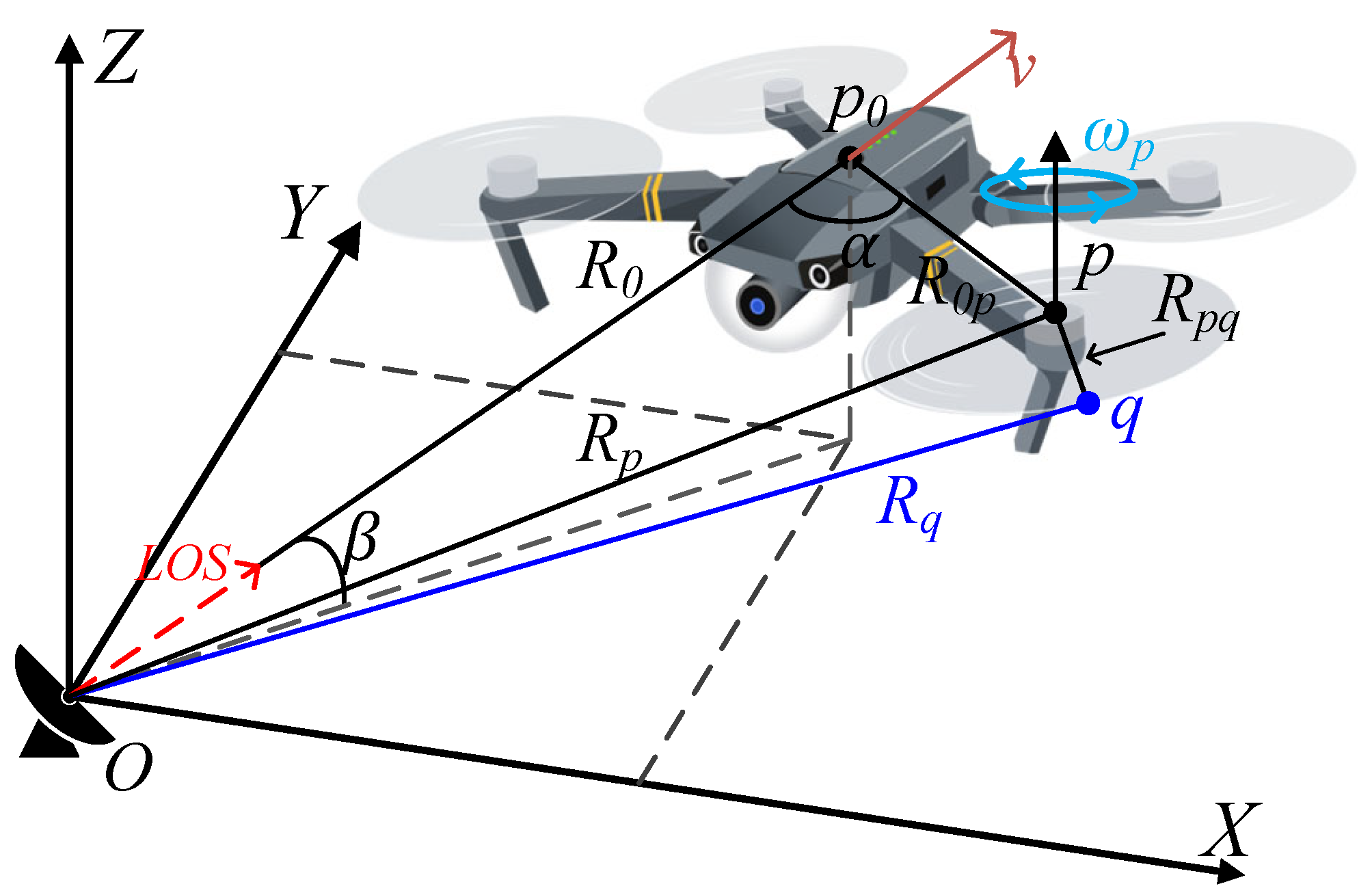
2.1. Echo Mathematical Model of a Flying Drone
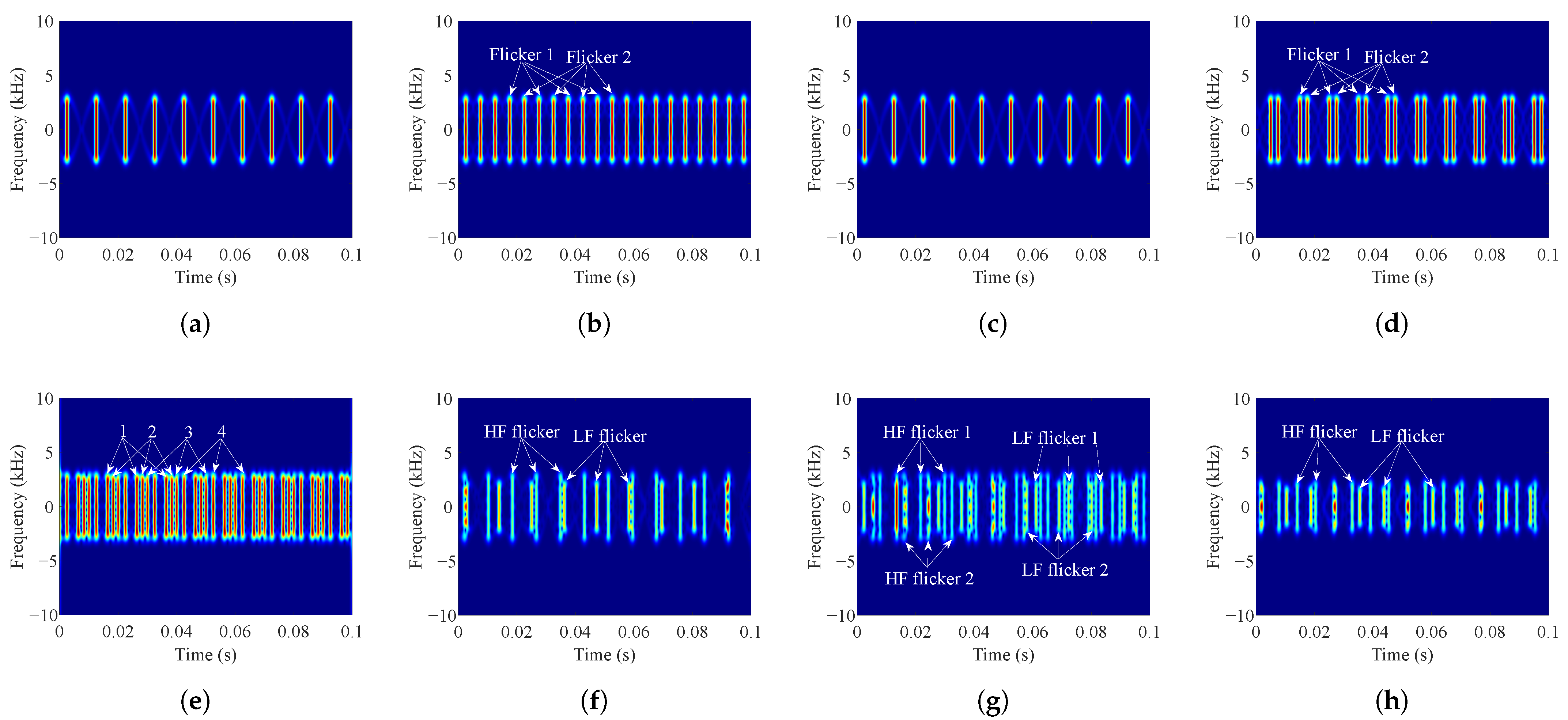
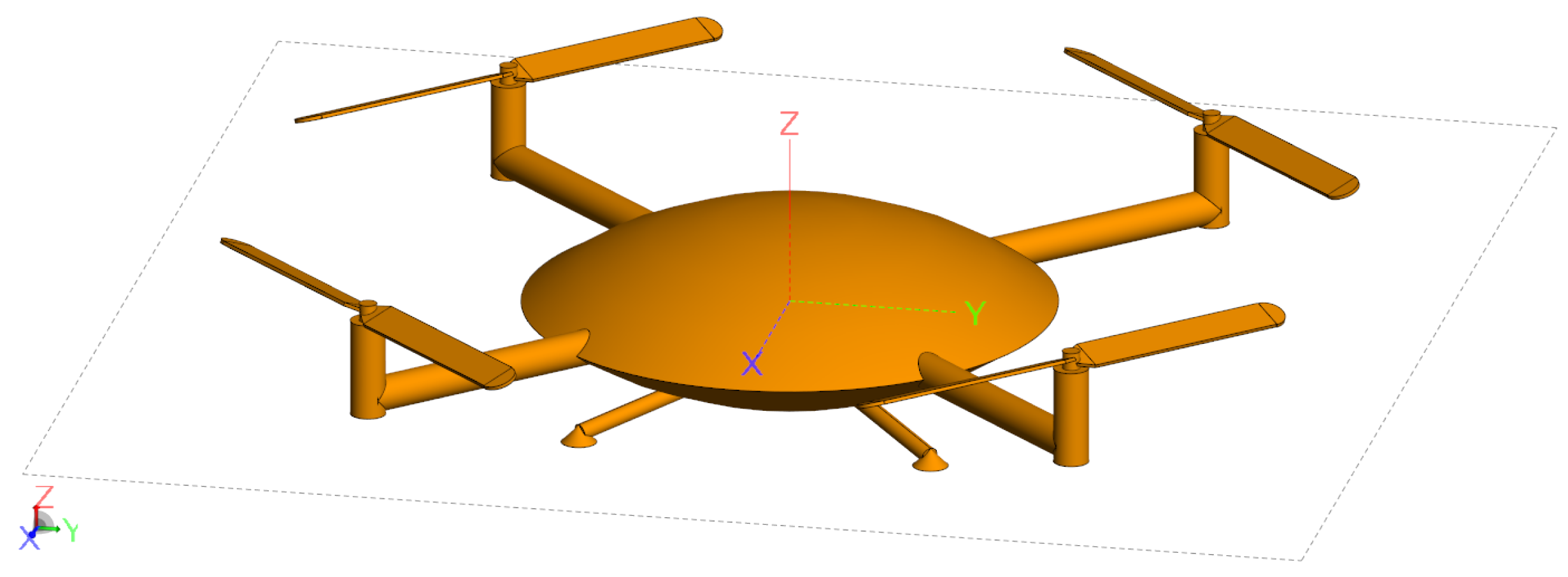
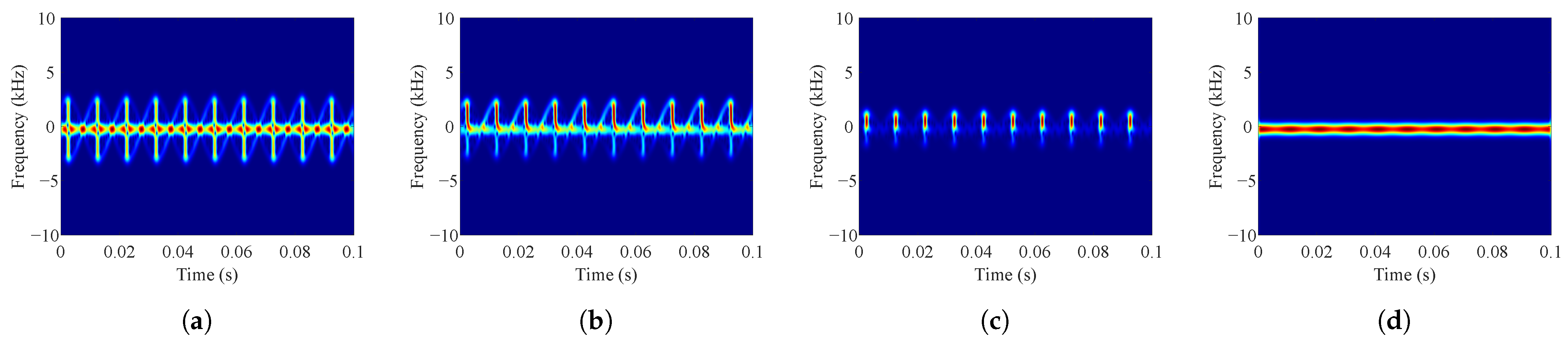
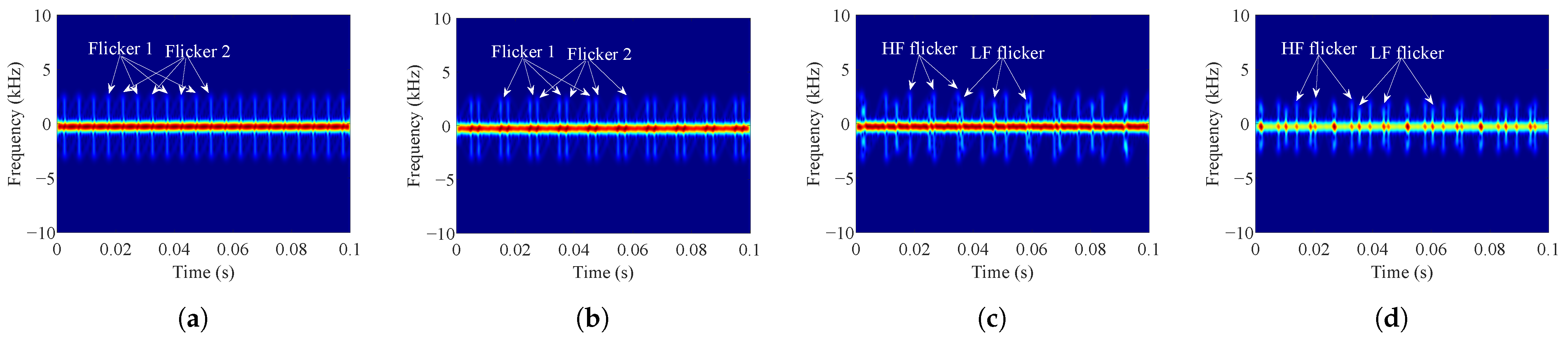
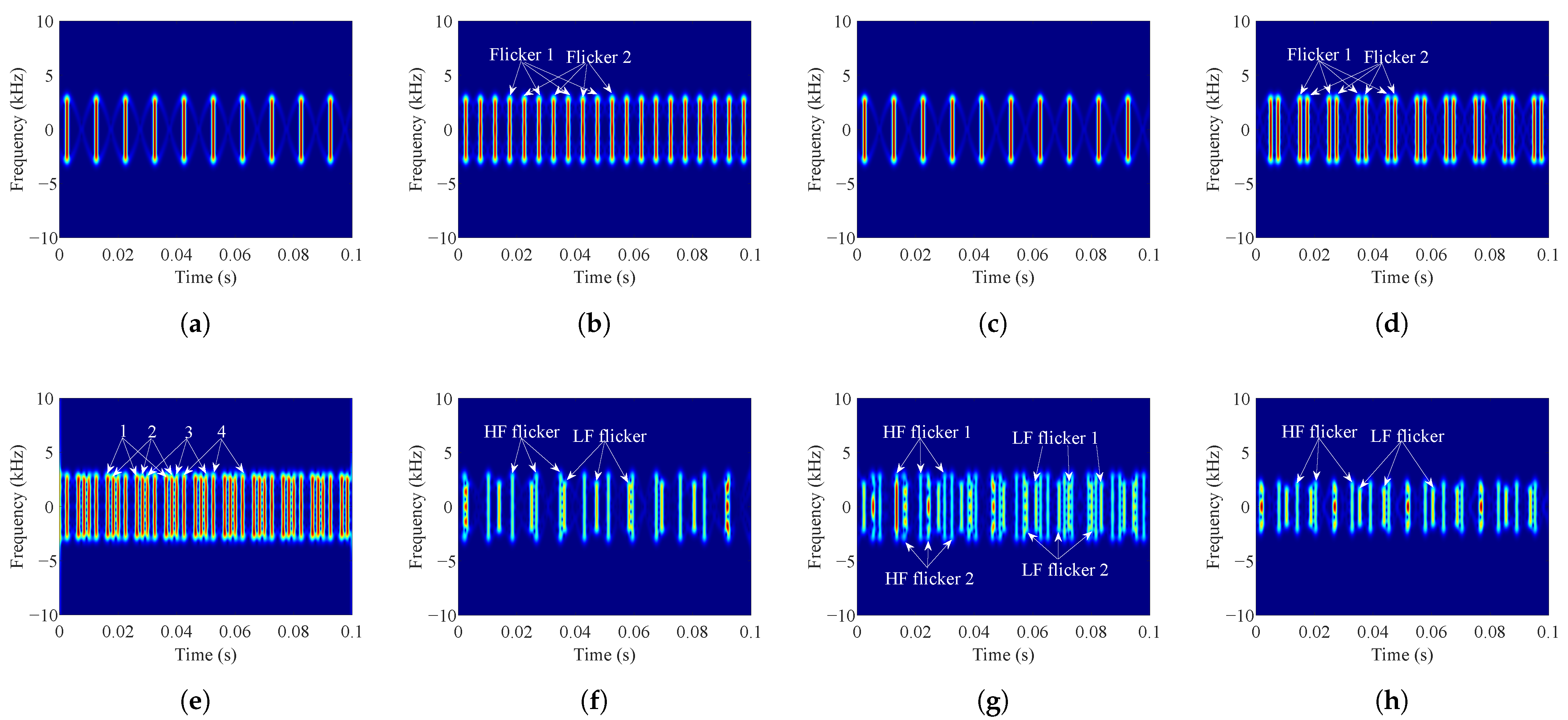
2.2. Theoretical Simulation Analysis of Flicker Mechanism and Electromagnetic Simulation Verification
3. Micro-Motion Parameter Estimation Algorithm Based on CVMD and SVD
3.1. CVMD Frequency Domain Segmentation
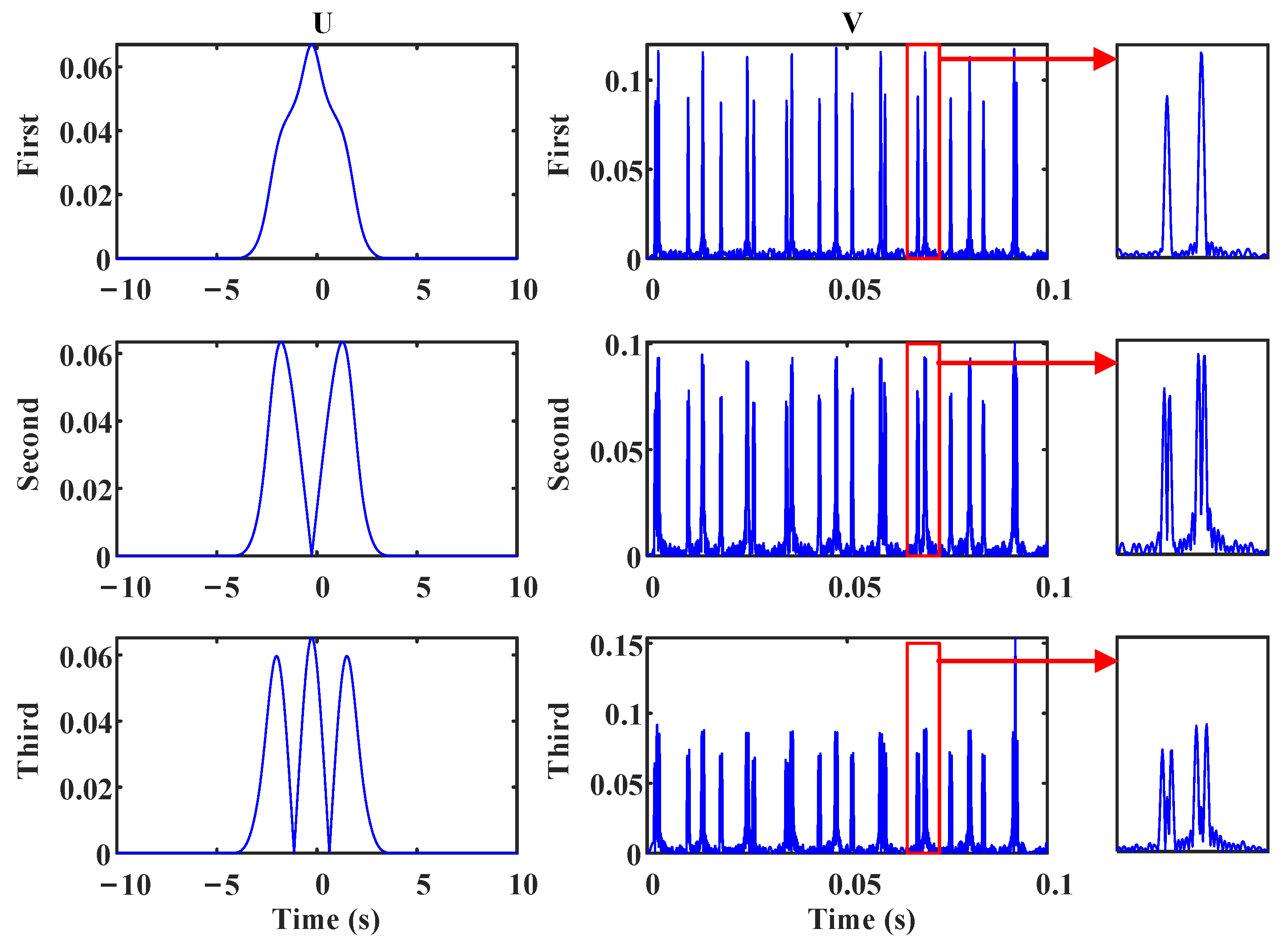
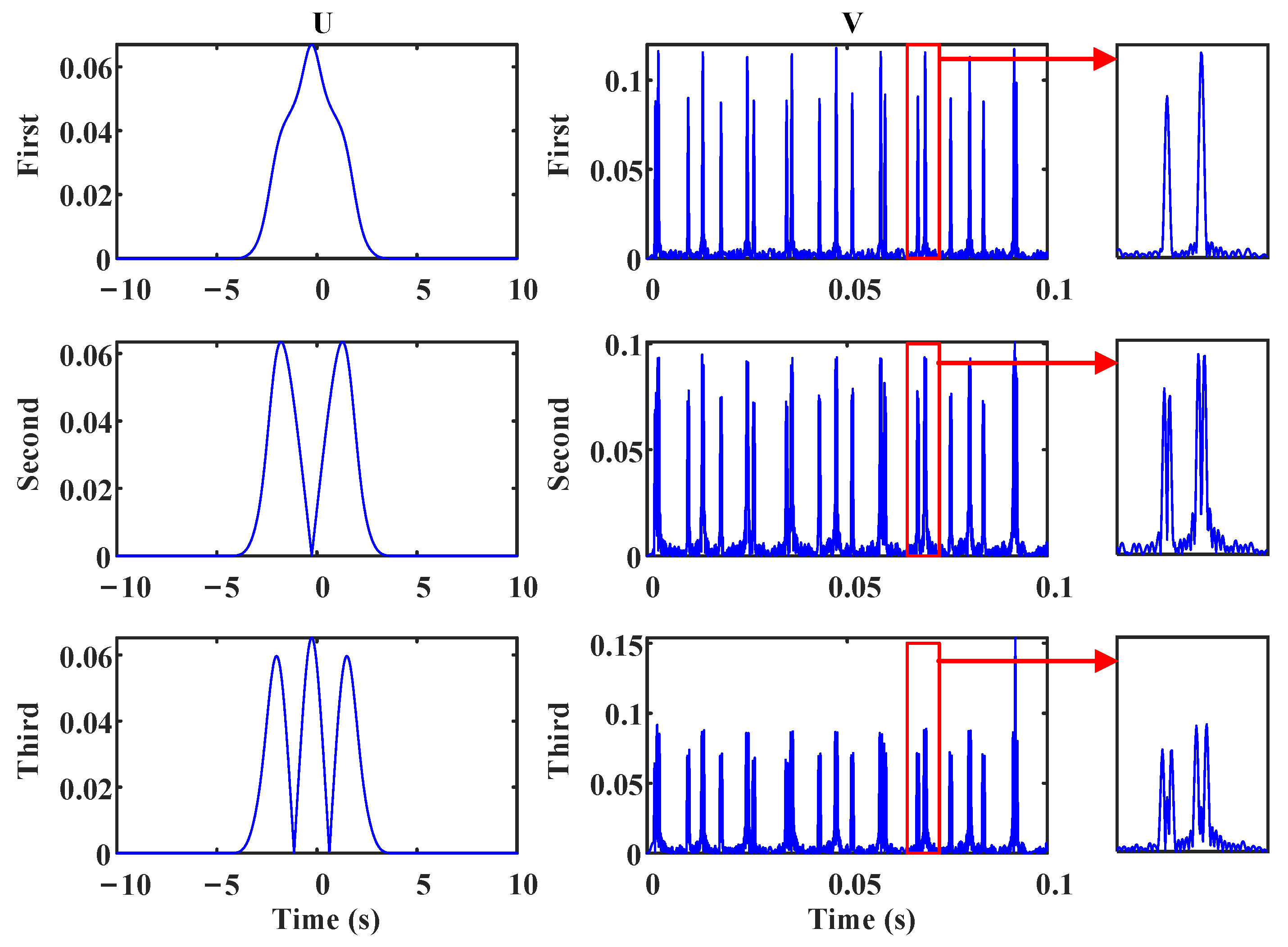
3.2. SVD Time Domain Positioning
3.3. Process of the Algorithm
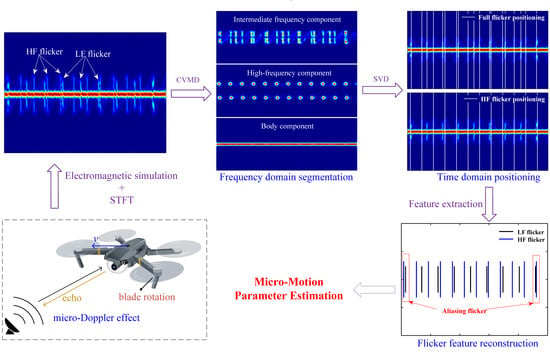
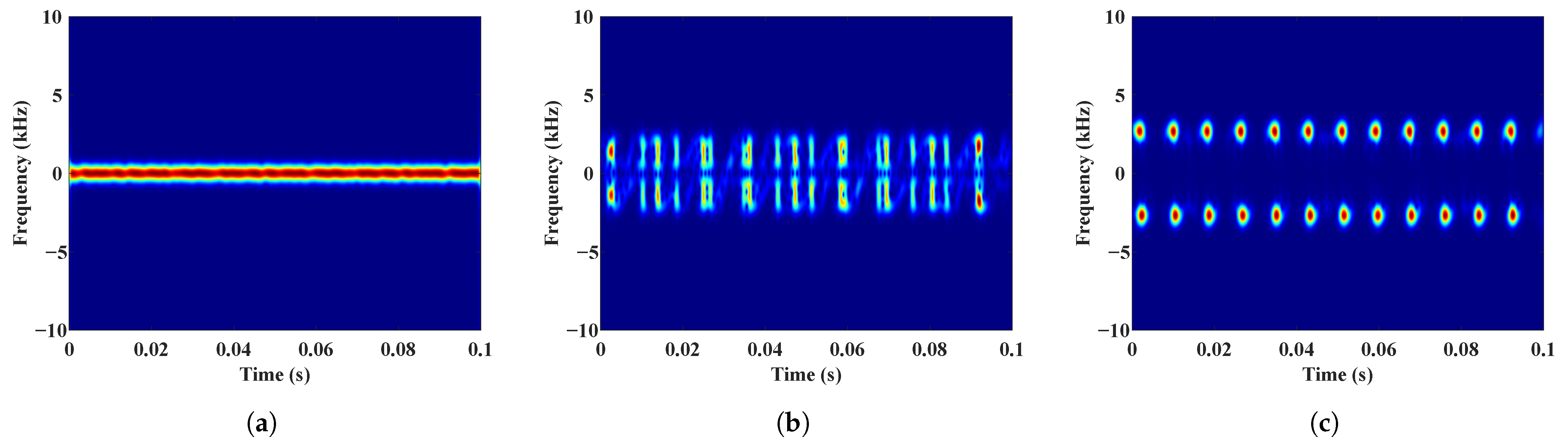
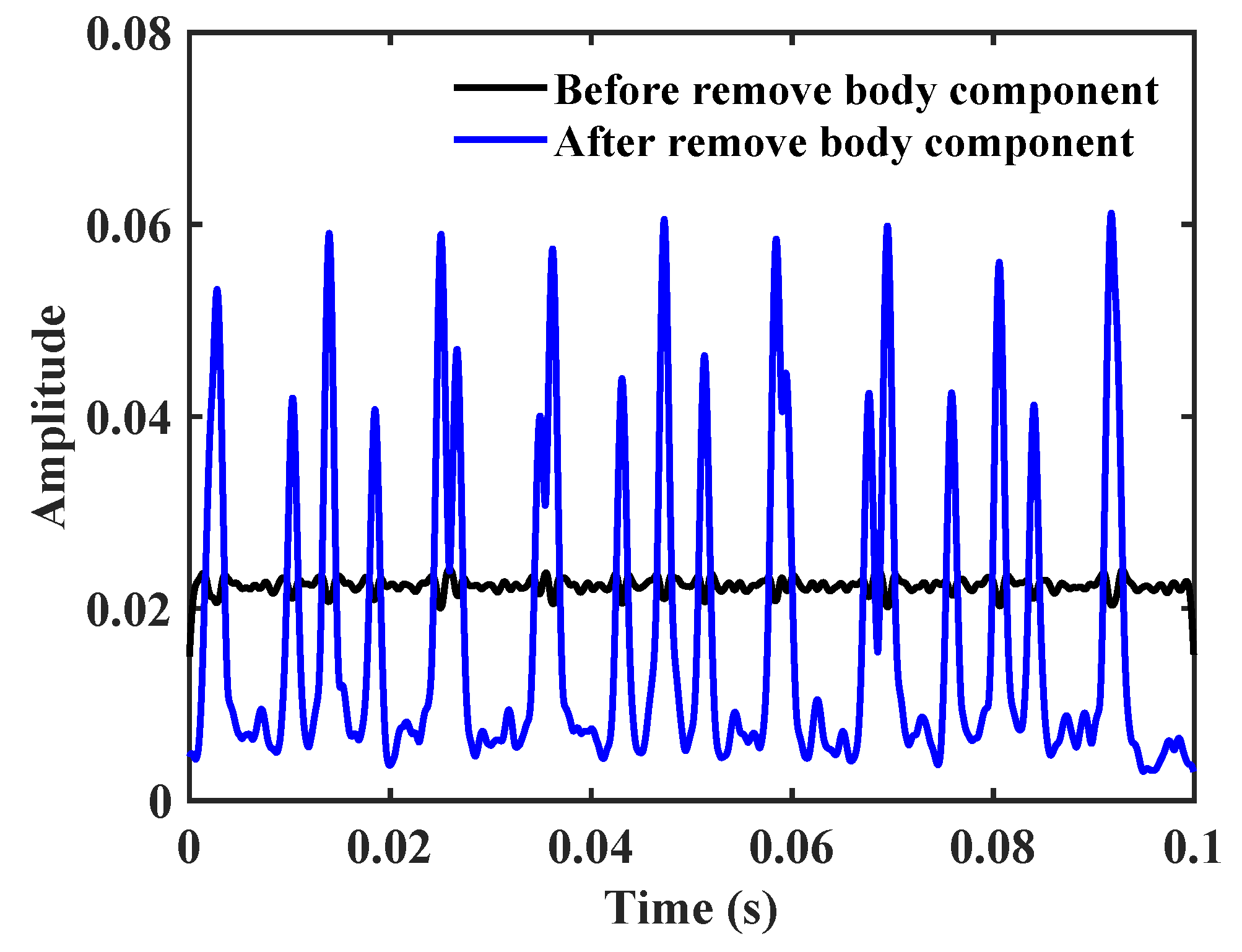
- Signal frequency domain segmentation and reconstruction. Select the appropriate number of decomposition layers K to perform CVMD frequency domain segmentation on the signal. Decompose the signal into three parts: body component, high-frequency component, and intermediate frequency component, where the intermediate frequency component is the sum of the functions of the residual mode, except the high-frequency component and the body component.
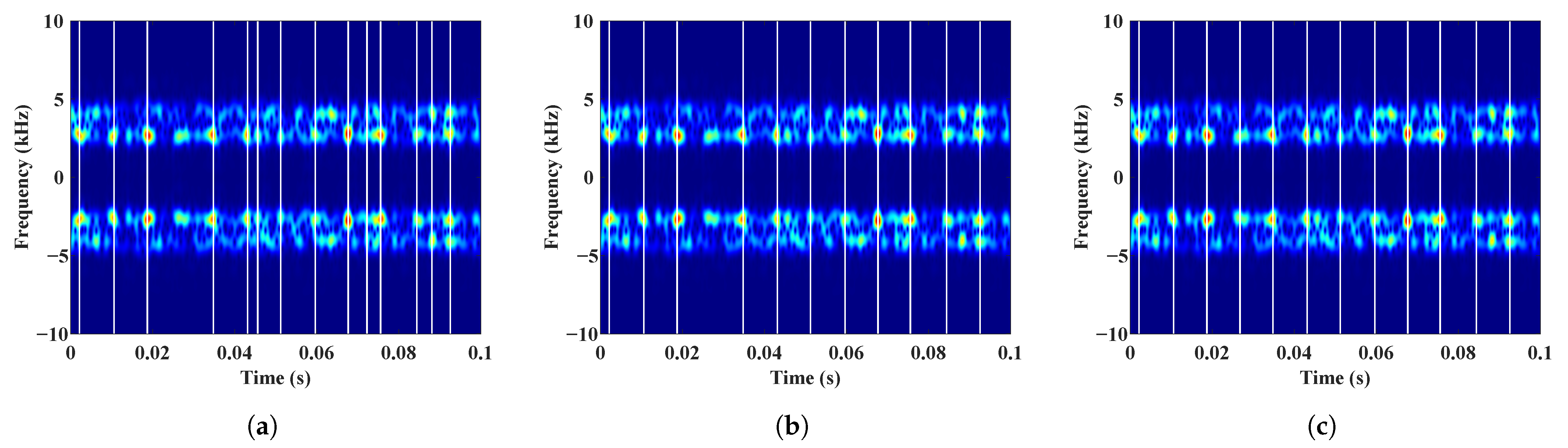
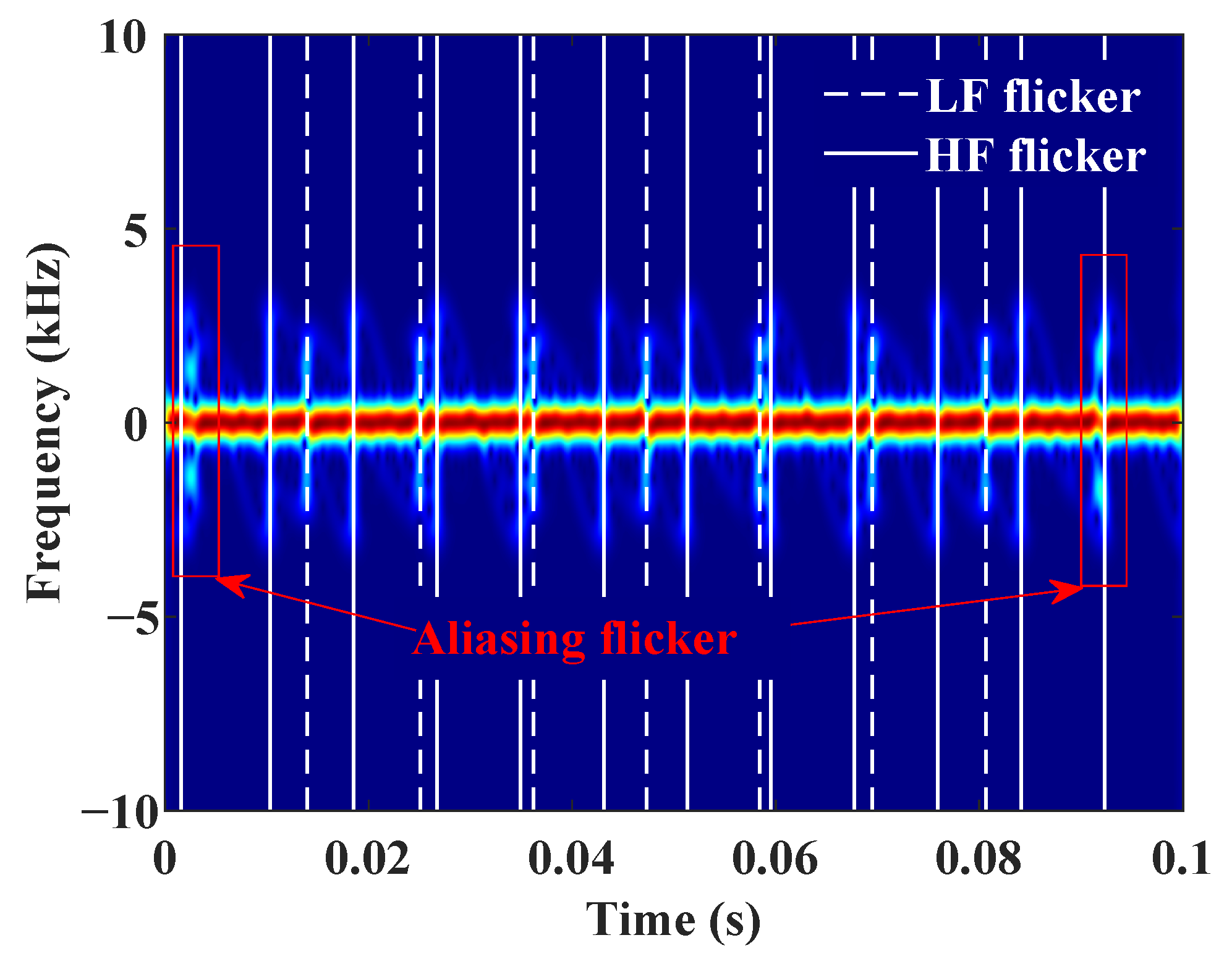
- Flicker time domain positioning. Using the SVD time domain positioning method proposed in Section 3.2, the complete flicker time domain coordinate set A and the high-frequency flicker time domain coordinate set B are obtained from the intermediate frequency and high-frequency components.
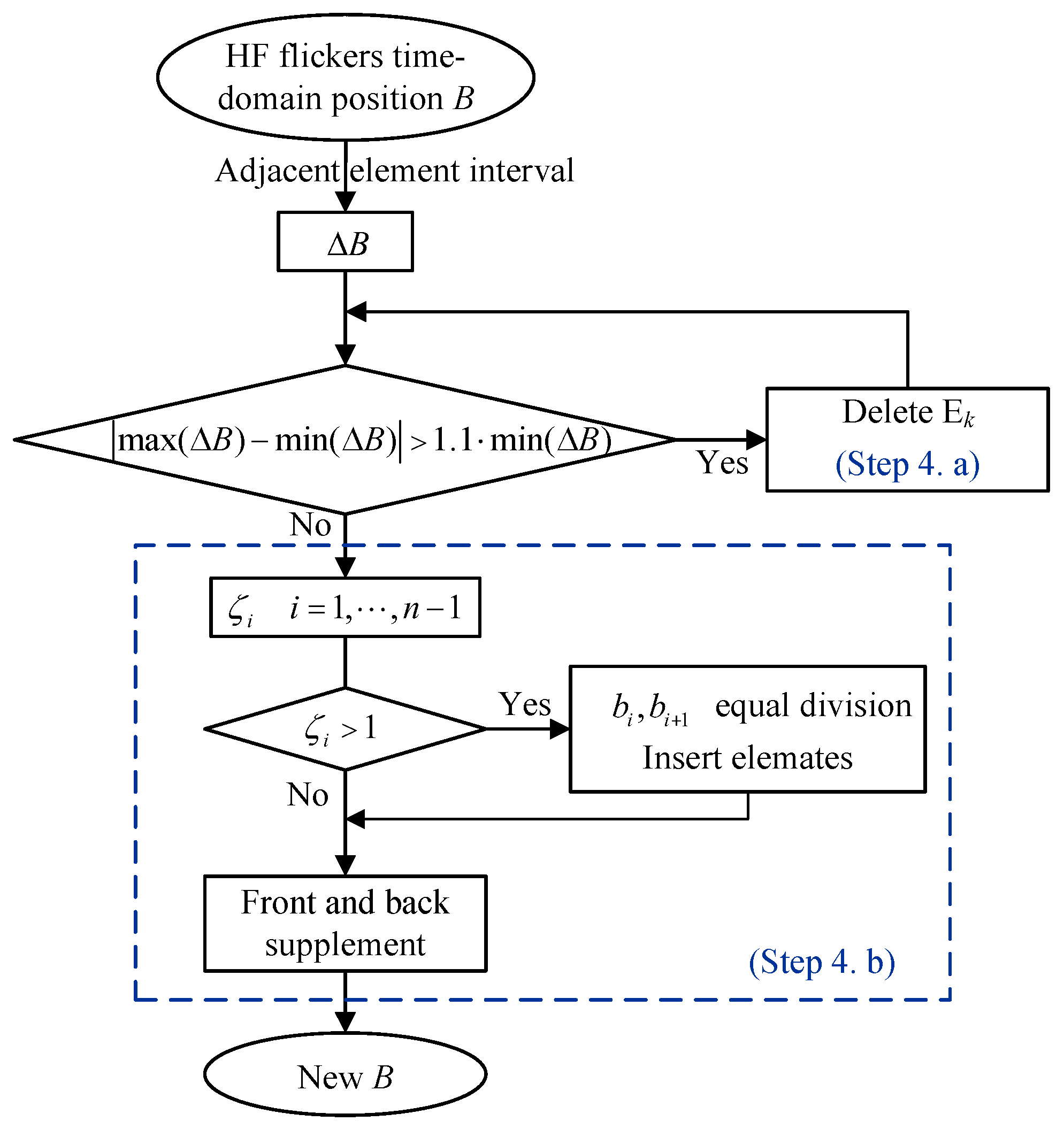
- High-frequency flicker time domain coordinate correction. Calculate the distance between the adjacent coordinate elements .
- (a)
- Solve for the label of the wrong coordinate in B, and delete the coordinate element in set B.
- (b)
- Calculate the coordinate interval evaluation factorwhere means approximate rounding. If , add elements between and to make the interval do equal division, and update set B. After completing all missing supplementary points, use the mean value of to determine whether there are elements missing at the left and right ends of the set, and if so, use as an interval to complete the missing elements.
- 4.
- High-frequency flicker micro-Doppler parameter estimation. The solved after the correction in step 2 is the estimated value of the flicker interval. In addition, in order to solve the Doppler bandwidth of the flicker, calculate the sum of of the frequency domain vectors with a radius of 2 and all time domain coordinates in Bwhere represents the frequency domain vector whose time domain coordinate is k in the time–frequency spectrum. Then do the same threshold segmentation as formula Equation (16) with the vector . At this time, the threshold generally takes . After segmentation, the frequency domain width of a high-frequency flicker is the estimated value of its Doppler bandwidth .
- 5.
- The nearest neighbors difference set. Delete the point in set A that is closest to the element position in set B to obtain a low-frequency flickering time domain coordinate set C.
- 6.
- Low-frequency flicker micro-Doppler parameter estimation.
- (a)
- Use the same method as step 3b to process set B to complete the missing points of set C.
- (b)
- Use the method of step 4 to estimate the micro-Doppler parameters and of low-frequency flicker. In order to avoid the influence of the high-frequency flicker on the estimation result of the low-frequency flicker Doppler bandwidth, the flicker point set , which is relatively far away from the high-frequency flicker in set C is selected to estimate the Doppler bandwidth. Calculate the point and the corresponding shortest distance , delete all points in set C that satisfy Equation (22) to obtain set .in which means the window length used in STFT.
- (c)
- In order to prevent periodic missing in low-frequency flicker coordinate positioning results—use to replace as the interval evaluation factor to perform the step 3b operation to make a second correction to set C.
- 7.
4. Results
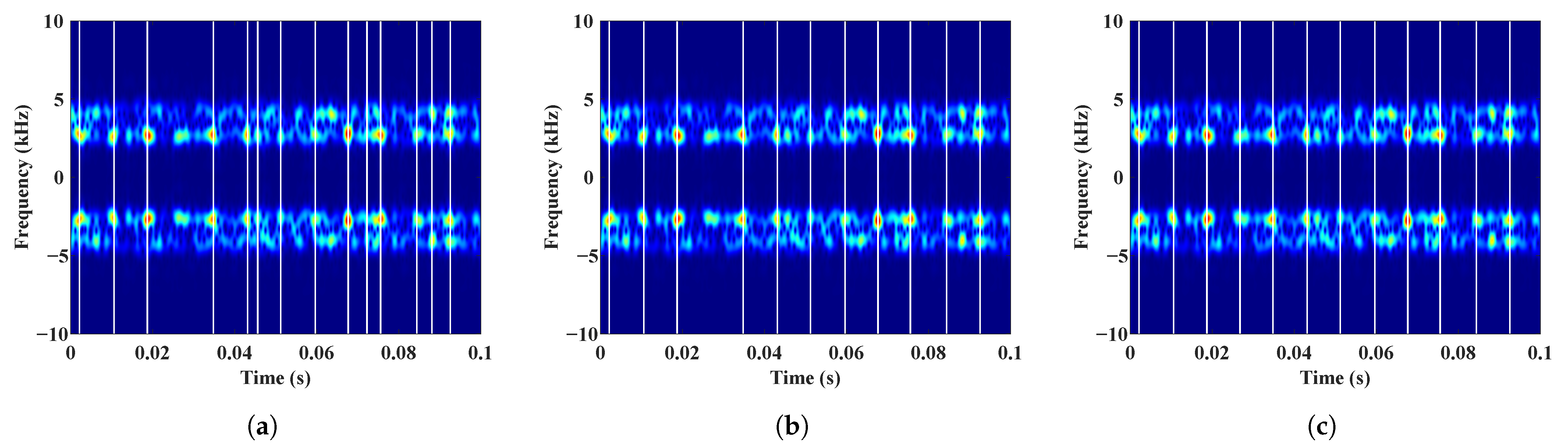
4.1. Analysis of Algorithm Simulation
4.2. Results of Parameter Estimation
5. Discussions
5.1. The Influence of Noise on Parameter Estimation
5.2. Strengths and Weaknesses
- (1)
- This paper analyzes the relationship between the multi-rotor micro-Doppler characteristics and the initial position of the rotor in detail. This work will provide a specific theoretical basis for researching the multi-rotor target micro-Doppler characteristics.
- (2)
- The proposed CVMD frequency domain segmentation method broadens the application of VMD in radar signal processing. According to the basic idea of the proposed method, the signal with obvious frequency domain distinction can be divided into frequency domains according to different purposes.
- (3)
- The proposed SVD time domain localization method can quickly obtain the time domain position of the flicker in the time–frequency spectrum. This method can be extended to the feature extraction of time domain images with obvious time domain distinction.
- (4)
- The proposed method can directly and automatically obtain the micro-Doppler parameter information of the multi-rotor target without other redundant operations, which makes up for the problem that the existing non-parametric parameter estimation methods are difficult to obtain the complete parameters of the multi-rotor.
- (1)
- The frequency domain segmentation idea of CVMD relies on the stable frequency domain distinction of the signal. When the position of the target signal in the frequency domain changes according to time, the frequency domain segmentation effect of this method will decrease rapidly.
- (2)
- Generally, the rotor speed difference of the multi-rotor drone is not particularly large, and the extracted high-frequency components will contain very few signal components. Therefore, the signal-to-noise ratio that the proposed method can adapt to is limited.
- (3)
- Although the proposed method solves the flicker reconstruction in the case of weak aliasing, the aliasing situation will be dire when there are many flicker components. Therefore, it was necessary for us to introduce a time–frequency analysis method with higher resolution (especially temporal resolution) in the following research.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the technological development and application of UAV systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Gong, J.; Yan, J.; Li, D.; Kong, D.; Hu, H. Interference of Radar Detection of Drones by Bird. Prog. Electromagn. Res. M 2019, 81, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Chen, V.C.; Qian, S. Joint time-frequency transform for radar range-Doppler imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 486–499. [Google Scholar] [CrossRef]
- Zhao, C.; Luo, G.; Wang, Y.; Chen, C.; Wu, Z. UAV Recognition Based on Micro-Doppler Dynamic Attribute-Guided Augmentation Algorithm. Remote Sens. 2021, 13, 1205. [Google Scholar] [CrossRef]
- Hanif, A.; Muaz, M.; Hasan, A.; Adeel, M. Micro-Doppler based Target Recognition with Radars: A Review. IEEE Sens. J. 2022, 22, 2948–2961. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, H.; Song, J.; Guan, J.; Li, J.; He, Z. Micro-Motion Classification of Flying Bird and Rotor Drones via Data Augmentation and Modified Multi-Scale CNN. Remote Sens. 2022, 14, 1107. [Google Scholar] [CrossRef]
- Ritchie, M.; Fioranelli, F.; Griffiths, H. Monostatic and bistatic radar measurements of birds and micro-drone. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar] [CrossRef] [Green Version]
- Rahman, S.; Robertson, D.A. Radar micro-Doppler signatures of drones and birds at K-band and W-band. Sci. Rep. 2018, 8, 17396. [Google Scholar] [CrossRef] [PubMed]
- Tahmoush, D. Detection of Small UAV Helicopters Using Micro-Doppler. In Proceedings of the SPIE Defense + Security, Baltimore, MD, USA, 29 May 2014. [Google Scholar] [CrossRef]
- Fang, X.; Lu, C.; Zhang, M.; Min, R. Detection of Small UAV Helicopters Using Micro-Doppler. In International Conference in Communications, Signal Processing, and Systems; Springer: Singapore, 2017. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, J.; Jin, Y.; Yu, H.; Liang, B.; Yang, D.G. Real-Time Processing of Spaceborne SAR Data with Nonlinear Trajectory Based on Variable PRF. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsle, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Torvik, B.; Olsen, K.E.; Griffiths, H. Classification of Birds and UAVs Based on Radar Polarimetry. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1305–1309. [Google Scholar] [CrossRef]
- Li, T.; Wen, B.; Tian, Y.; Wang, S.; Yin, Y. Optimized Radar Waveform Parameter Design for Small Drone Detection Based on Echo Modeling and Experimental Analysis. IEEE Access 2019, 7, 101527–101538. [Google Scholar] [CrossRef]
- Schröder, A.; Aulenbacher, U.; Renker, M.; Böniger, U.; Oechslin, R.; Murk, A.; Wellig, P. Numerical RCS and micro-Doppler investigations of a consumer UAV. In Proceedings of the SPIE Security + Defence, Edinburgh, UK, 24 October 2016. [Google Scholar] [CrossRef]
- Speirs, P.J.; Schröder, A.; Renker, M.; Wellig, P.; Murk, A. Comparisons between simulated and measured X-band signatures of quad-, hexa-and octocopters. In Proceedings of the 15th European Radar Conference (EuRAD), Madrid, Spain, 29 November 2018. [Google Scholar] [CrossRef]
- Li, Y.; Yi, J.; Wan, X.; Liu, Y.; Zhan, W. Helicopter rotor parameter estimation method for passive radar. J. Radars 2018, 7, 313–319. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, C.; Xia, S.; Xu, D.; Gao, Y.; Zeng, X. Feature Extraction of Rotor Blade Targets Based on Phase Compensation in a Passive Bistatic Radar. J. Radars 2021, 10, 929–943. [Google Scholar] [CrossRef]
- Ji, G.; Song, C.; Huo, H. Detection and identification of low-slow-small rotor unmanned aerial vehicle using micro-Doppler information. IEEE Access 2021, 9, 99995–100008. [Google Scholar] [CrossRef]
- Liu, J.; Ai, X.; Feng, Z.; Wu, Q. Motion estimation of micro-motion targets with translational motion. In Proceedings of the IET International Radar Conference 2015, Hangzhou, China, 14–16 October 2015. [Google Scholar] [CrossRef]
- Gannon, Z.; Tahmoush, D. Measuring UAV propeller length using micro-Doppler signatures. In Proceedings of the IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020. [Google Scholar] [CrossRef]
- Zhang, W.; Li, G. Detection of Multiple Micro-Drones via Cadence Velocity Diagram Analysis. Electron. Lett. 2018, 54, 441–443. [Google Scholar] [CrossRef]
- Kang, K.; Choi, J.; Cho, B.; Lee, J.; Kim, K. Analysis of micro-Doppler signatures of small UAVs based on Doppler spectrum. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3252–3267. [Google Scholar] [CrossRef]
- Wu, Q.; Zhao, J.; Zhang, Y.; Huang, Y. Radar Micro-Doppler Signatures Model Simulation and Feature Extraction of Three Typical LSS Targets. In Proceedings of the International Conference on Information Science and Control Engineering (ICISCE), Shanghai, China, 20–22 December 2019. [Google Scholar] [CrossRef]
- Harmanny, R.I.A.; de Wit, J.J.M.; Prémel Cabic, G. Radar micro-Doppler feature extraction using the spectrogram and the cepstrogram. In Proceedings of the 11th European Radar Conference, Rome, Italy, 18 December 2014. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Zhou, L.; Wu, Y.; Ding, C. An Estimation Method of Rotation Frequency of Unmanned Aerial Vehicle Based on Auto-correlation and Cepstrum. J. Electron. Inf. Technol. 2019, 41, 255–261. [Google Scholar] [CrossRef]
- Huizing, A.; Heiligers, M.; Dekker, B.; de Wit, J.J.M.; Cifola, L.; Harmanny, R. Deep Learning for Classification of Mini-UAVs Using Micro-Doppler Spectrograms in Cognitive Radar. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 46–56. [Google Scholar] [CrossRef]
- Gu, F.F.; Fu, M.H.; Liang, B.S.; Li, K.M.; Zhang, Q. Translational motion compensation and micro-Doppler feature extraction of space spinning targets. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1550–1554. [Google Scholar] [CrossRef]
- Chen, J.; Yu, H.; Liang, B.; Peng, J.; Sun, G.C. Motion compensation/autofocus in airborne synthetic aperture radar: A review. IEEE Geosci. Remote Sens. Mag. 2021, 10, 1109. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, F.; Jiang, Z.; He, S.; Mo, Q. Complex variational mode decomposition for signal processing applications. Mech. Syst. Signal Process. 2017, 86, 75–85. [Google Scholar] [CrossRef]
- Tanaka, T.; Mandic, D.P. Complex empirical mode decomposition. IEEE Signal Process. Lett. 2007, 14, 101–104. [Google Scholar] [CrossRef]
- De Wit, J.J.M.; Harmanny, R.I.A.; Molchanov, P. Radar micro-Doppler feature extraction using the Singular Value Decomposition. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014. [Google Scholar] [CrossRef]
- Ritchie, M.; Fioranelli, F.; Borrion, H.; Griffiths, H. Multistatic micro-Doppler radar feature extraction for classification of unloaded/loaded micro-drones. IET Radar Sonar Navig. 2017, 11, 116–124. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Attitude Angle | Rotors Rotating Velocity (rad/s) | Blade Phase |
|---|---|---|---|
| 1 | 0 | 50 | 45 |
| 2 | 0 | [50, −50, −50, 50] | [45, 45, 45, 45] |
| 3 | 0 | [50, −50, −50, 50] | [45, 135, 135, 45] |
| 4 | 0 | [50, −50, −50, 50] | [0, 45, 45, 0] |
| 5 | 0 | [50, −50, −50, 50] | [45, 60, 90, −25] |
| 6 | 30 | [45, −61, −45, 61] | [45, 135, 135, 45] |
| 7 | 0 | [45, −61, −45, 61] | [0, 25, 127, 100] |
| 8 | 60 | [60, −80, −60, 80] | [45, 135, 135, 45] |
| Type 6 | Type 8 | ||||
|---|---|---|---|---|---|
| Estimated Value | Actual Value | Estimated Value | Actual Value | ||
| Flickering cycle (ms) | High-frequency flicker | 8.2500 | 8.1967 | 6.2467 | 6.2500 |
| Low-frequency flicker | 11.1000 | 11.1111 | 8.3500 | 8.3333 | |
| Rotor rotation frequency (Hz) | High-frequency flicker | 60.6061 | 61.0000 | 80.0427 | 80.0000 |
| low-frequency flicker | 45.0450 | 45.0000 | 59.8892 | 60.0000 | |
| Doppler bandwidth (kHz) | High-frequency flicker | 6.3332 | 6.2632 | 4.7824 | 4.7424 |
| low-frequency flicker | 4.5723 | 4.6204 | 3.6618 | 3.5568 | |
| Blade length (m) | High-frequency flicker | 0.1439 | 0.1414 | 0.1425 | 0.1414 |
| Low-frequency flicker | 0.1398 | 0.1414 | 0.1459 | 0.1414 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Li, J.; Liang, B.; Wang, X.; Peng, Z. A Multi-Rotor Drone Micro-Motion Parameter Estimation Method Based on CVMD and SVD. Remote Sens. 2022, 14, 3326. https://doi.org/10.3390/rs14143326
Yang D, Li J, Liang B, Wang X, Peng Z. A Multi-Rotor Drone Micro-Motion Parameter Estimation Method Based on CVMD and SVD. Remote Sensing. 2022; 14(14):3326. https://doi.org/10.3390/rs14143326
Chicago/Turabian StyleYang, Degui, Jin Li, Buge Liang, Xing Wang, and Zhenghong Peng. 2022. "A Multi-Rotor Drone Micro-Motion Parameter Estimation Method Based on CVMD and SVD" Remote Sensing 14, no. 14: 3326. https://doi.org/10.3390/rs14143326
APA StyleYang, D., Li, J., Liang, B., Wang, X., & Peng, Z. (2022). A Multi-Rotor Drone Micro-Motion Parameter Estimation Method Based on CVMD and SVD. Remote Sensing, 14(14), 3326. https://doi.org/10.3390/rs14143326