1. Introduction
Autonomous systems refer to systems that can deal with non-programmed or non-preset situations and has certain self-management and self-guidance ability. Compared with automation equipment and systems, autonomous systems can cope with more environments, can complete a wider range of operations and control and have broader application potential. In the future, there are good reasons to believe that autonomy is the ultimate destination of the control field. With recent developments, autonomous systems have successfully achieved ideal results in various key fields such as autopilot and aircraft anti-collision systems.
An infrared small target is a target with low contrast and a signal-to-noise ratio that occupies only a few dozen pixels on the imaging plane when the infrared imaging distance is far. Compared with target detection under visible light, infrared small-target detection has stronger anti-interference ability, stronger night detection ability and more accuracy. This makes the infrared small-target detection technology play an indispensable role in the fields of infrared remote warning, infrared imaging guidance and infrared search and tracking. Therefore, the research on infrared small-target detection technology is of great significance.
One of the key research fields of autonomous system perception is infrared small- target detection. This is because an infrared image has four advantages: (1) It has excellent working ability in weak light and harsh environments. (2) The target can be detected even in the presence of non-biological obstacles, with strong anti-interference ability. (3) The infrared wavelength is short, and the target image with high resolution can be obtained. (4) It has strong camouflage target recognition ability. Consequently, enhancing the detection effect of infrared small targets in complex backgrounds can improve the perception ability of autonomous systems, so as to promote their safe operation. Consequently, enhancing the detection ability of infrared small targets has become an important research direction of autonomous system.
Hyperspectral images contain rich information, but too much information will also have a great impact on the target [
1]. The imaging conditions of spectral images are rough and contain a large number of mixed pixels [
2]. In contrast, infrared images have the advantages of fast imaging speed, clear imaging and more prominent target heat information. This makes infrared target detection faster and more accurate, so the application scenarios are more extensive.
Infrared targets imaging depends on the temperature difference and emissivity difference between the target itself and its surrounding environment, so the target appears in the form of highlight in the background. In infrared small-target detection, researchers have done a great deal of research, and there are many mature algorithms. However, there are three reasons for detection failure:
- (1)
The imaging distance of small infrared target usually makes the pixel ratio of small target to the whole image very small.
- (2)
The target radiance decreases with the increase of the action distance, which makes the target weak and the distance from the environment is low. The target is easy to be submerged by the complex background, resulting in the failure of detection.
- (3)
Among other factors, the existence of interference objects similar to the target in complex imaging environment and complex background will result in a high rate of false alarms.
Therefore, infrared small-target detection still has high research value.
Nowadays, the idea of deep learning has been to detect small infrared targets and has made important contributions. The general idea of deep learning algorithm is to learn target features in a data-driven way. However, it still has the following disadvantages:
- (1)
Background clutter and noise obscure small targets, resulting in their failure to be detected;
- (2)
The target is very small, resulting in detection failure.
As shown in
Figure 1, in these two difficult situations, the effect of the traditional algorithm is not ideal. Especially in the second difficult case, the target occupies only a few pixels. The existing algorithms have difficulty to solve this kind of problem effectively. Therefore, improving the detection ability of the algorithm in difficult situations is the key problem to be solved.
Therefore, to solve these challenges, an image enhancement algorithm combining sharpening the spatial filter and upsampling is proposed in this paper. First, the image is sharpened by spatial filter to enhance the grey mutation and the details of the image, improve the separation degree between the small target and the background and enhance the characteristics of the small target. Thus, the detection failure caused by background clutter and noise inundation is avoided. Then, the image is upsampled, and double–triple interpolation is used to increase the target pixels, so as to enlarge the image to four times its original size in equal proportion; the purpose of this is to enlarge the target. By enhancing the information on the small targets and increasing the number of pixels of the small targets, our algorithm can provide better detection in complex backgrounds. As a summary, this paper has the following contributions.
- (1)
Sharpening spatial filters is proposed to enhance small targets. By increasing the contrast between the edges of the object and the surrounding image elements, the small target is emphasised at a nuanced level, and the separation of the small target from the background is increased. Compared with existing algorithms, our algorithm makes small targets clearer and easier to detect, thus solving the problem of the inaccurate detection of small targets due to background clutter and noise drowning.
- (2)
Upsampling is designed to expand the target pixels, i.e., the image is scaled equally using bi–triple interpolation, allowing the enhanced small targets to be scaled up as well. Very small targets that are difficult to detect are enlarged to targets that are relatively easy to detect. In practice, the algorithm enhances the recognition of small targets and solves the problem of detection failure due to a small target.
- (3)
By comparing the experiments with other algorithms on the NUAA–SIRST dataset, it is demonstrated that the algorithm proposed in this paper has better performance relative to existing algorithms in the three evaluation metrics of Pd, Fa and IoU, and it has better applications in the field of perception of autonomous systems.
- (4)
Throughout the paper, we review relevant works in
Section 2, introduce our proposed method in
Section 3. In
Section 4, the proposed detection architecture is analysed quantitatively and qualitatively, and the conclusion is given in
Section 5.
3. Proposed Method
3.1. Revisiting DNANet Detector
The DNANet algorithm first pre-processes the input image and feeds it into a densely nested interaction module backbone to extract multilayer features. The fusion of multilayer features is then repeated at the intermediate convolutional nodes of the hopping connection, and the fused features are then output to the decoder subnet. The multilayer features are then adaptively enhanced using the channel space attention module to achieve better feature fusion. The feature pyramid fusion module connects shallow features with different types of information to deeper features, resulting in richer, more informative features and ultimately a robust feature map as shown in Equation (1), where
is the obtained features at all levels and G is the final obtained feature map. Finally, the feature map is fed into the eight-connected neighbourhood-clustering module, and if any two pixel points
have intersecting regions in their eight neighbourhoods (as in Equation (2)) and have the same value (0 or 1) (as in Equation (3)), then the spatial location of the target centre of mass is calculated and the target is predicted. The specific parameters of DNANet are shown in
Table 1.
However, the algorithm has certain drawbacks in some cases. When an extremely small and faint target is recognised, this makes the target pixel value and its neighbouring pixel values . This makes not be empty, but , i.e., the prediction condition is not satisfied, resulting in the inability to compute the spatial location of the target’s centre of mass and thus predict such targets. The robustness of the algorithm in the face of such cases needs to be improved, and the following improvements are made in two aspects of this paper.
3.2. Target Feature Enhancement Based on Sharpening Spatial Filters
In
Section 2, we introduced a sharpening spatial filters. We found that the idea of using sharpening spatial filters based on second-order differential-Laplace operators can solve such problems.
When DNANet predicts the input image, it needs to meet the conditions of Equations (2) and (3) to predict the target, but some targets do not meet the conditions. In order to solve this problem, the sharpening spatial filter is used to convert the values of adjacent pixels into the same values as the target pixels, making them meet Equations (2) and (3). Since in a binary map, the target pixel value , we also need an algorithmic calculation of the neighbouring pixel values such that the processed to satisfy the prediction conditions so that such targets can be predicted.
In DNANet, the algorithm ultimately predicts the binary image. Therefore, to achieve the above purpose, it is necessary to increase the pixel value of the target edge so that there are more pixels with a pixel value of 1 around the target after conversion to a binary image. When the value of a pixel point is greater than ε, it is set to 1, and when it is less than
, it is set to 0. Because the pixel values of the target edges fall in a gradient, there is a grey scale step. This results in some pixels at the edge of the target having a value less than but very close to
. This makes it impossible for the points adjacent to the target pixel to satisfy the constraint. Since property two of second-order differentiation is known, the differentiation is not zero at the start of the grey scale step or slope, i.e.,
using the second-order differential-Laplace operator, which is calculated as Equation (4):
where
and
are the input image and the sharpened image, respectively. For the purpose of making the enhanced image retain the background characteristics as well as the sharpening effect, the central factor c = 1 is taken in this paper.
Taking the point into Equation (4) gives . At this point, is not empty, and after transforming into a binary image, which satisfies the constraint, thus solving the above problem and achieving the recognition of such targets.
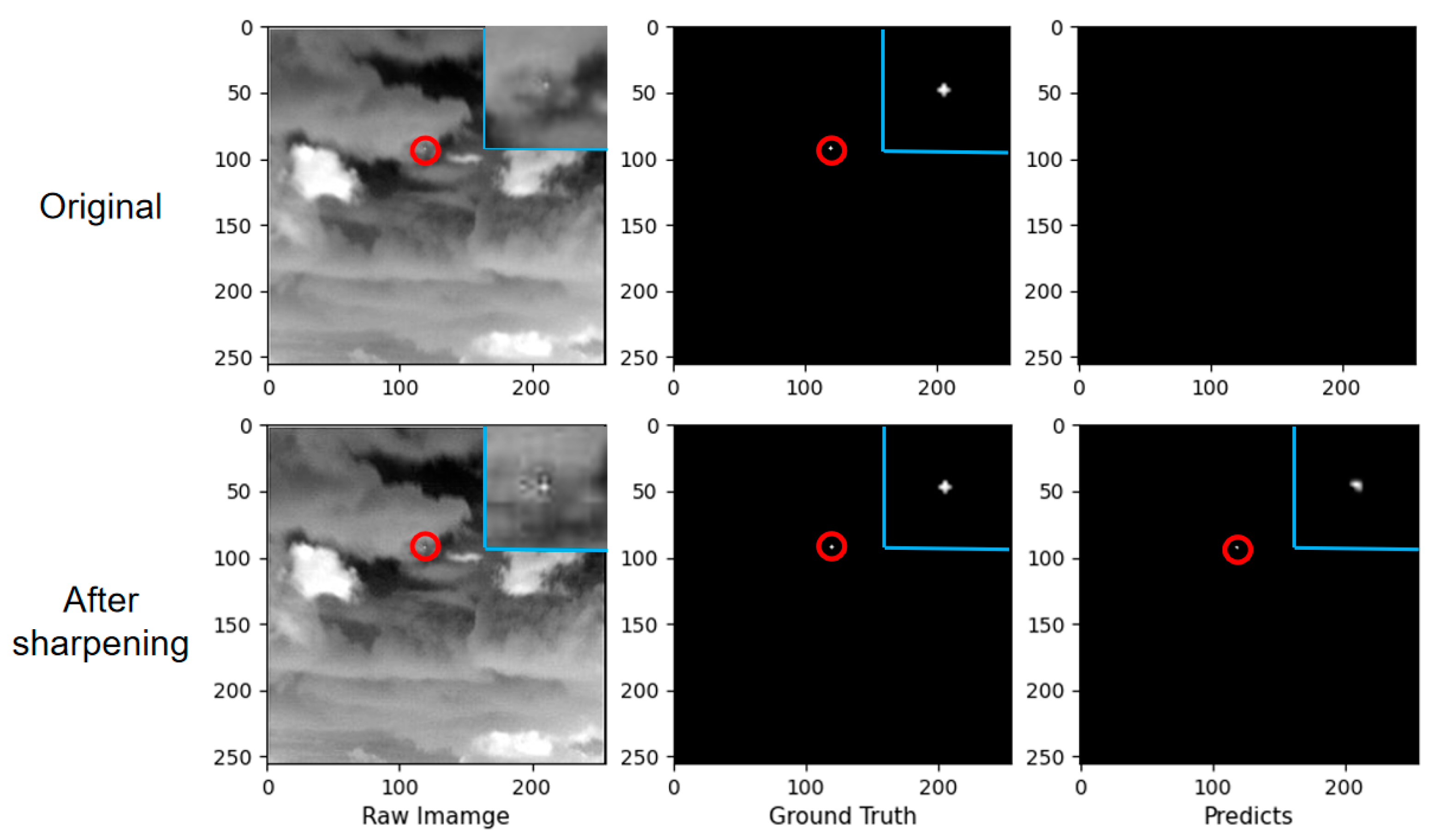
The effect of the edges of the small target after sharpening and filtering enhancement is shown in
Figure 2.
Using
Figure 2 as an example, the signal-to-noise ratio (SCR) of this small target is calculated. A small target whose SCR is high is easier to detect. As can be seen from
Table 2, after the enhancement of our algorithm m, the SCR of the small target is enhanced from 0.074 to 0.134, an improvement of 0.06.
3.3. Target Pixel Point Expansion Based on Upsampling
Only the image has been sharpened and filtered. Although it has brought some improvements in detection, there is still some room for improvement. Therefore, we need to add pixels in the image on the basis of image enhancement. The purpose of this step is to make more pixels meet the constraint condition of on the basis of , so as to further optimize the detection effect. Therefore, we use upsampling to achieve this purpose.
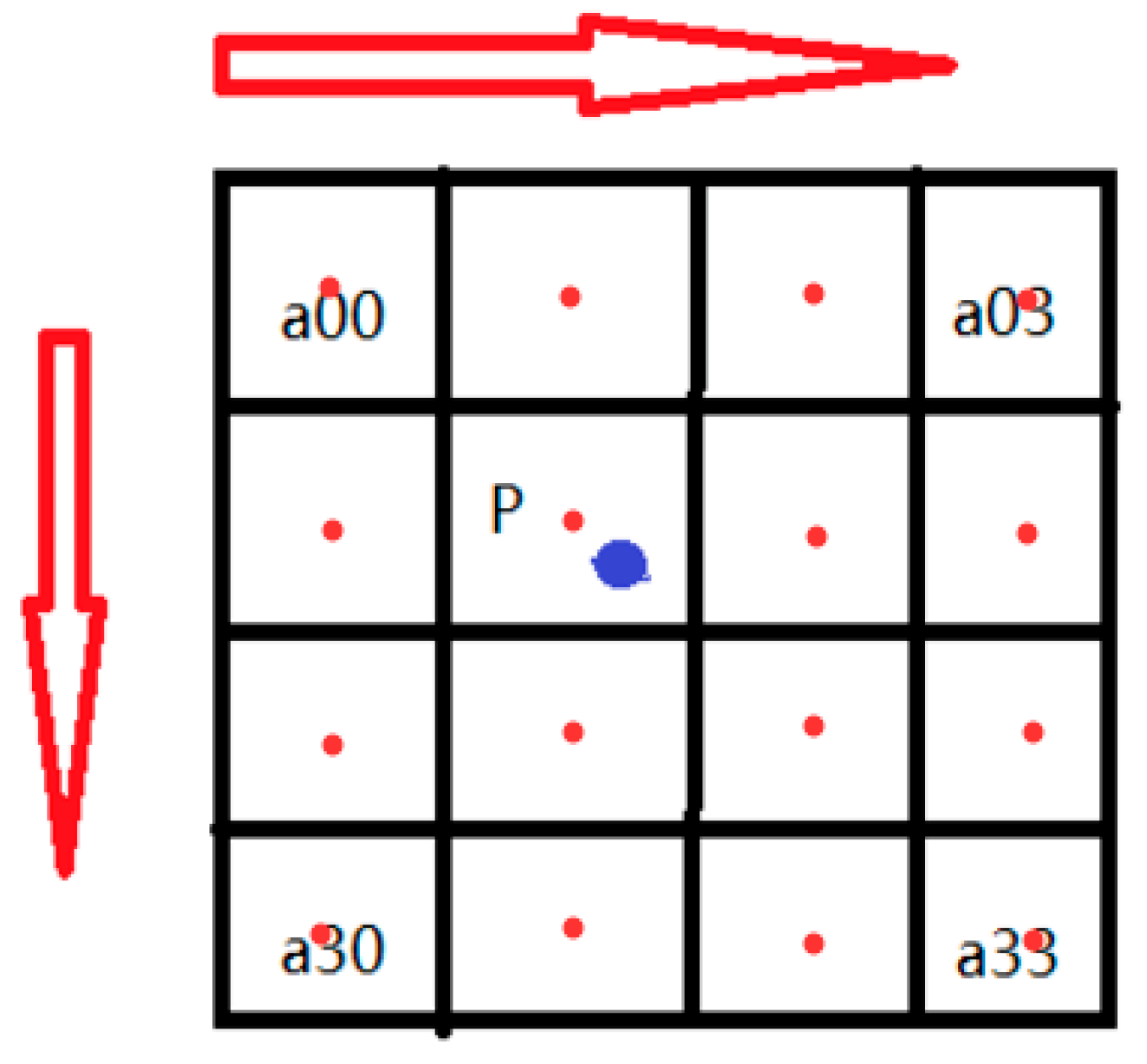
For the purpose of making the expanded pixel points closer to the original image, i.e., to better preserve the small targets after enhancement, the algorithm in this paper uses bicubic interpolation to increase the number of pixels in the image. This approach results in an enlargement closer to the high-resolution image, which is calculated as follows.
First construct the bicubic function:
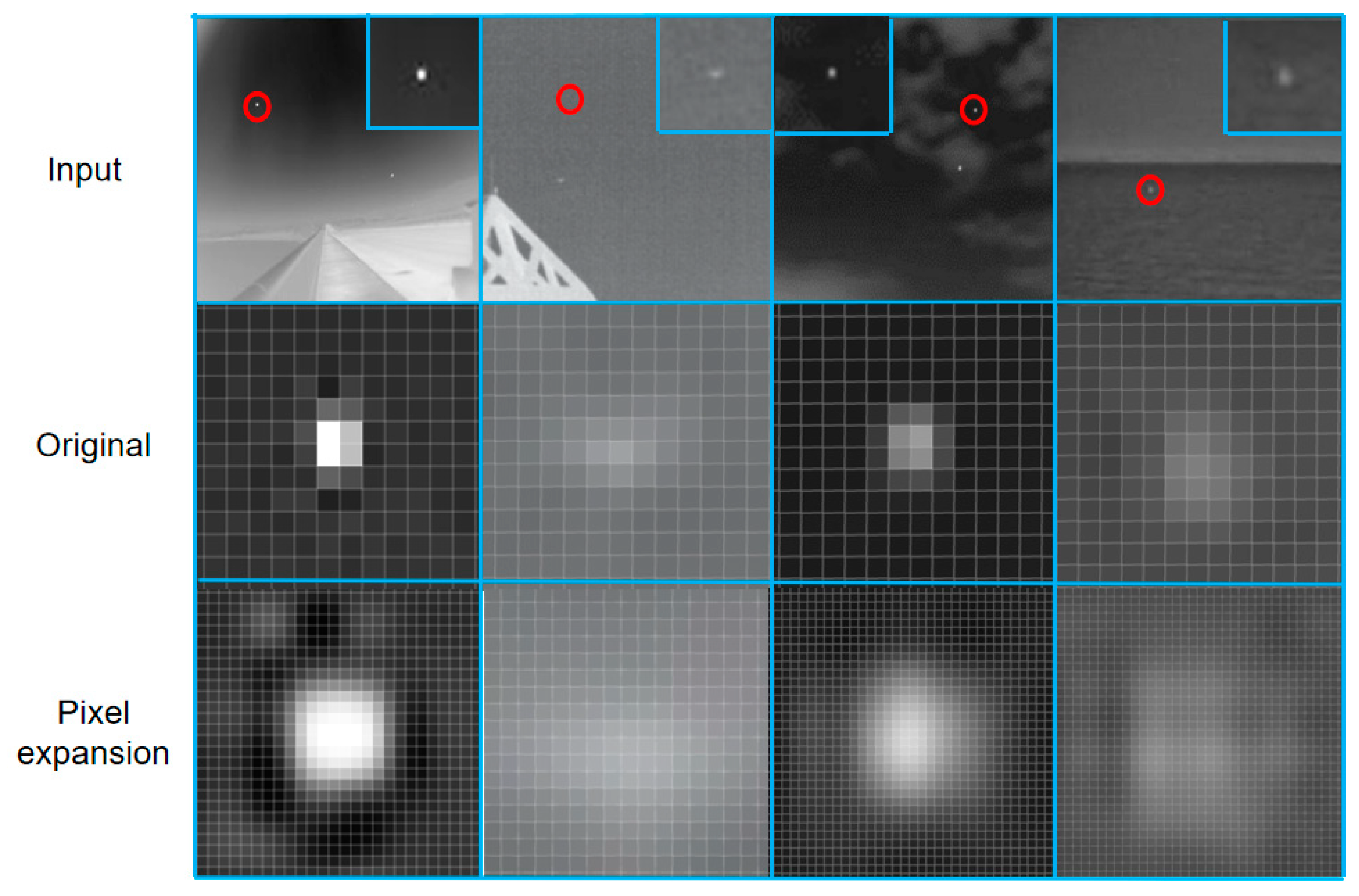
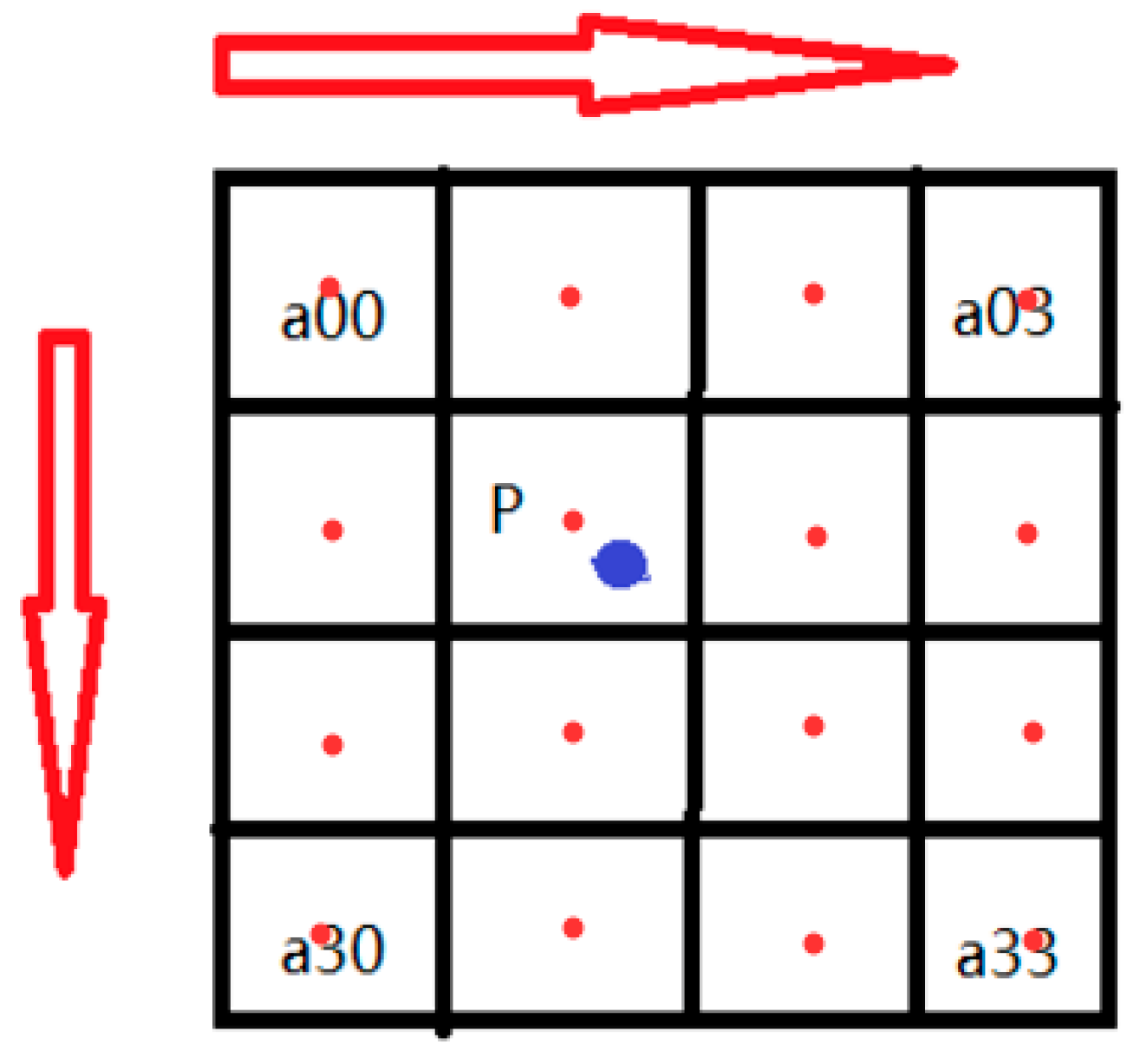
As shown in
Figure 3, x is the distance from each pixel point to point p. The weights
corresponding to the 16 pixels around point p are obtained by finding the parameter x. When the weights of the 16 pixel points around the target pixel point p are obtained, the value of the enlarged image
is equal to the weighted superposition of the 16 pixel points, which is calculated as follows:
where
is the location of 16 pixel points. By expanding the target pixel points, because the pixel values obtained from the bi–triple interpolation calculation are closest to the pixel values of the original image, more pixel points meet the constraints, thus circumventing the problem of not detecting the target due to its being too small and improving the detection effect.
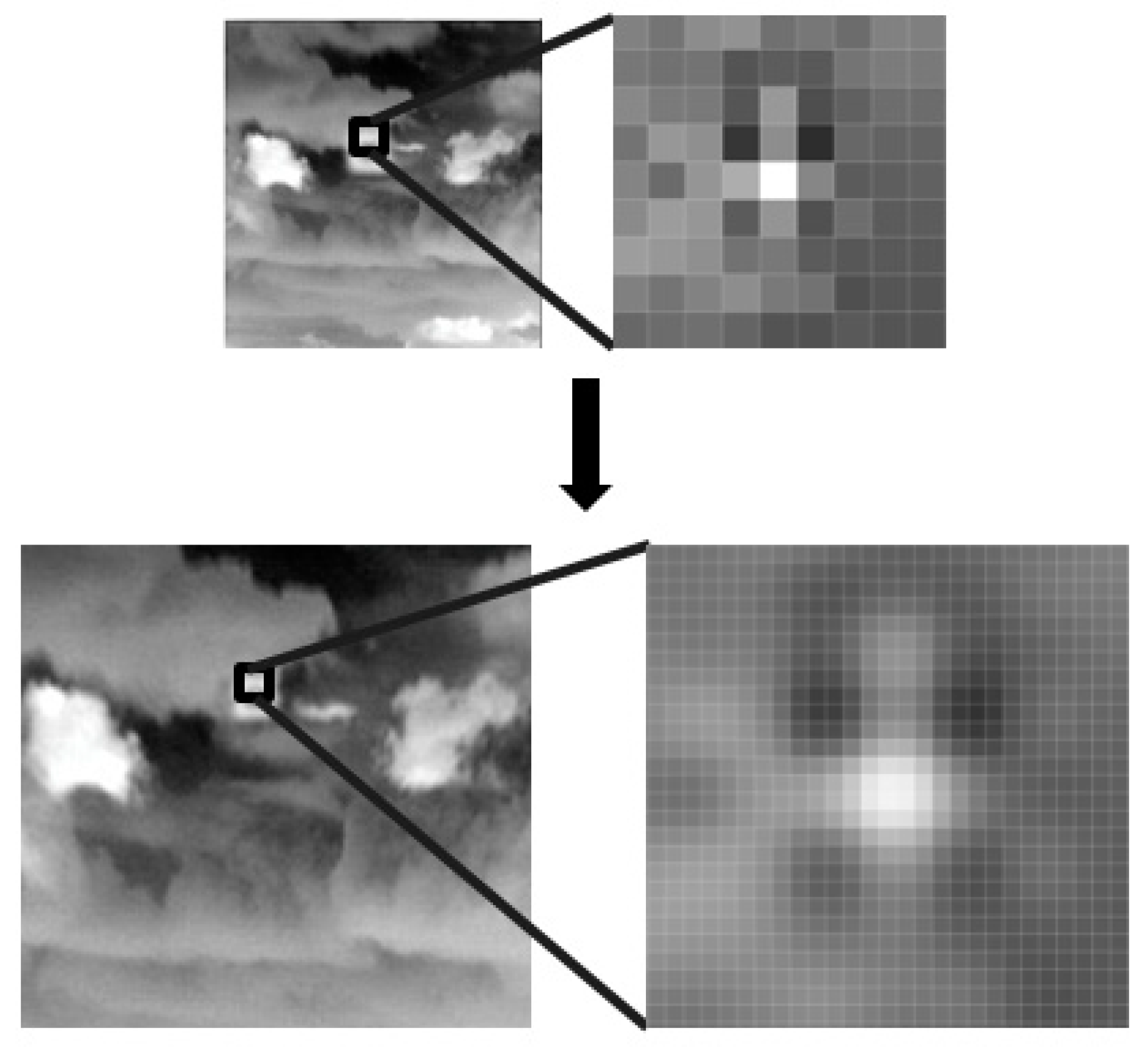
As shown in
Figure 4, after the upsampling process, the number of small target pixels is increased, and more pixel points satisfy the constraints.
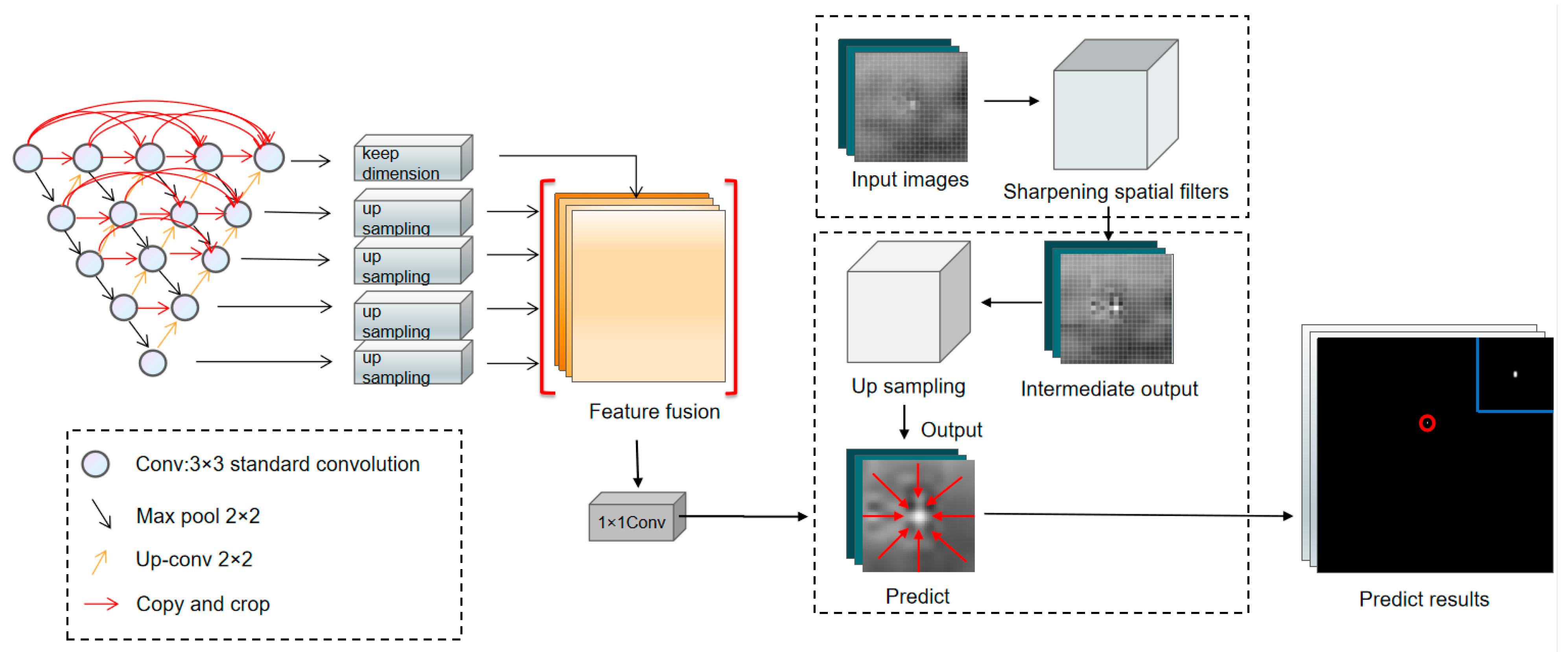
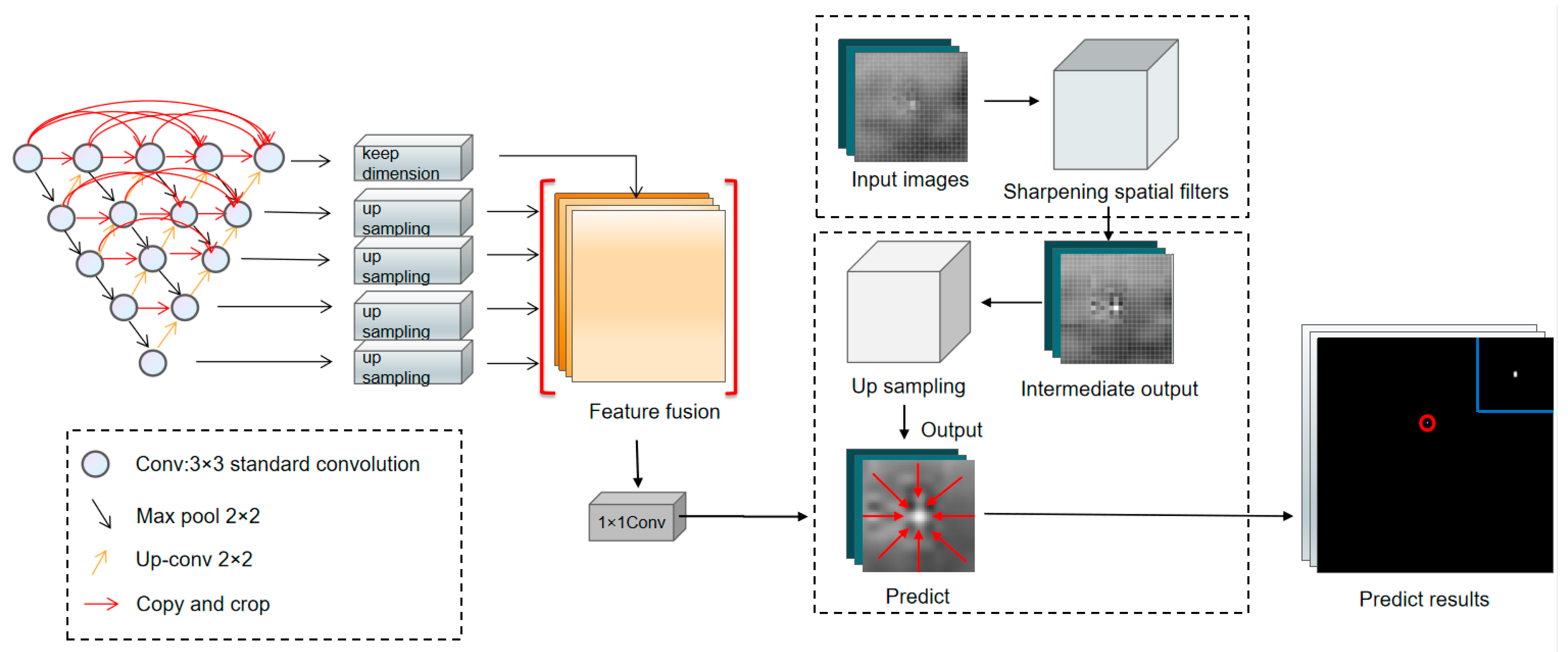
3.4. Overall Process
We propose in this paper an image enhancement-based algorithm to detect infrared small targets. This is because some small targets themselves do not have a prominent grey-scale jump in the area connected to the background, or the number of pixels in the small target is very small compared with the number of pixels in the whole image. In both cases, the number of pixels that satisfy the prediction criteria for the small target itself is insufficient. Existing algorithms are not effective in detecting these two cases. Therefore, this paper starts with improving the detection head of the algorithm by enhancing the small targets to improve the detection effect. The first step is to use the idea of sharpening spatial filtering to improve the pixel value of the target. On this basis, the enhanced image is upsampled to increase the number of target pixels. This avoids the problem of detection failure due to background clutter, noise drowning and small targets. The overall flow chart of the method is shown in
Figure 5.
4. Results of the Numerical Experiments
4.1. Introduction to the Dataset
In this section, we use the NUAA–SIRST dataset [
18] as a benchmark to compare the results of our proposed algorithm with those of existing algorithms. In total, there are 427 infrared images in the dataset, of which there are 480 instances, and the dataset is divided into three parts: a training set, a validation set and a test set in the ratio 5:2:3.
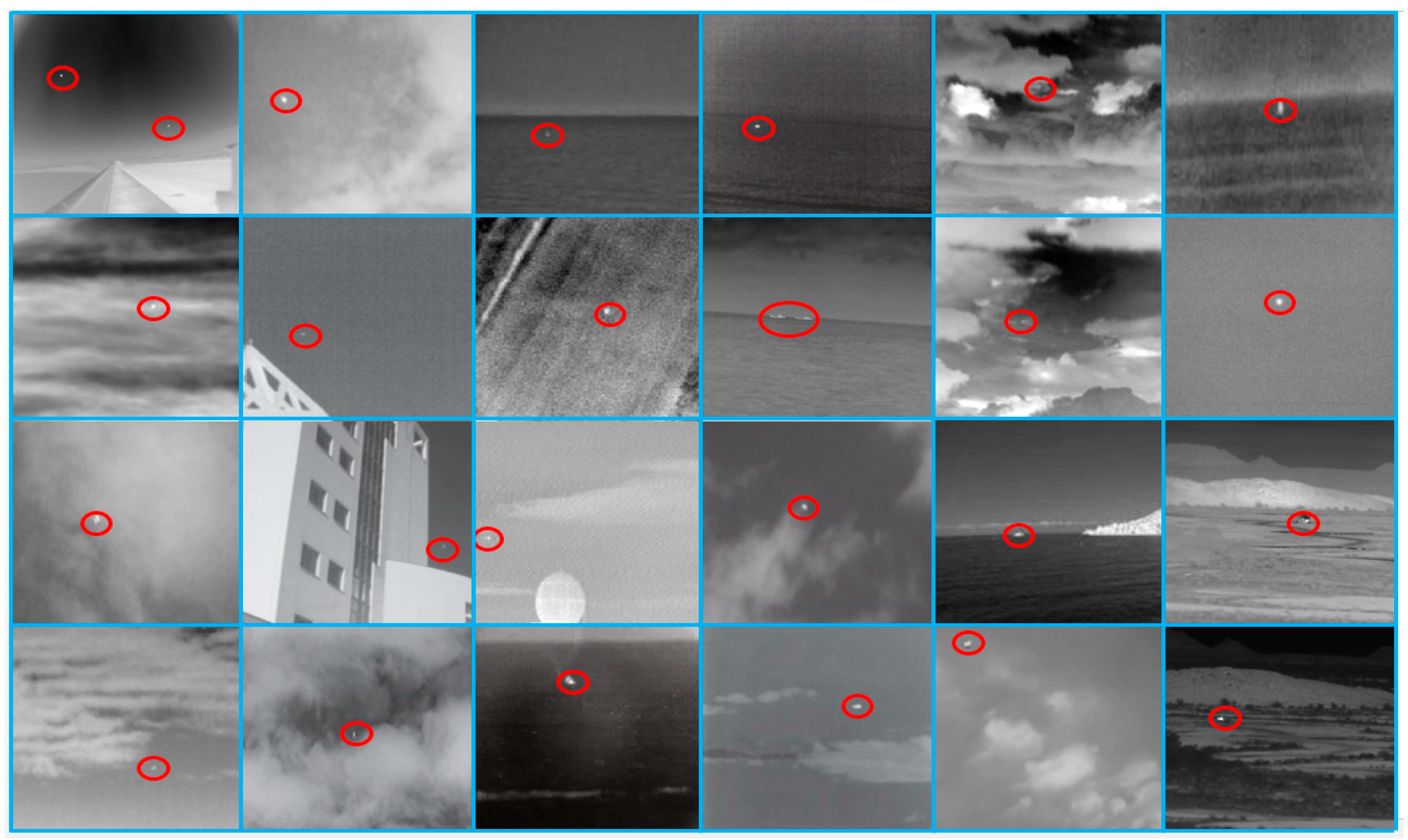
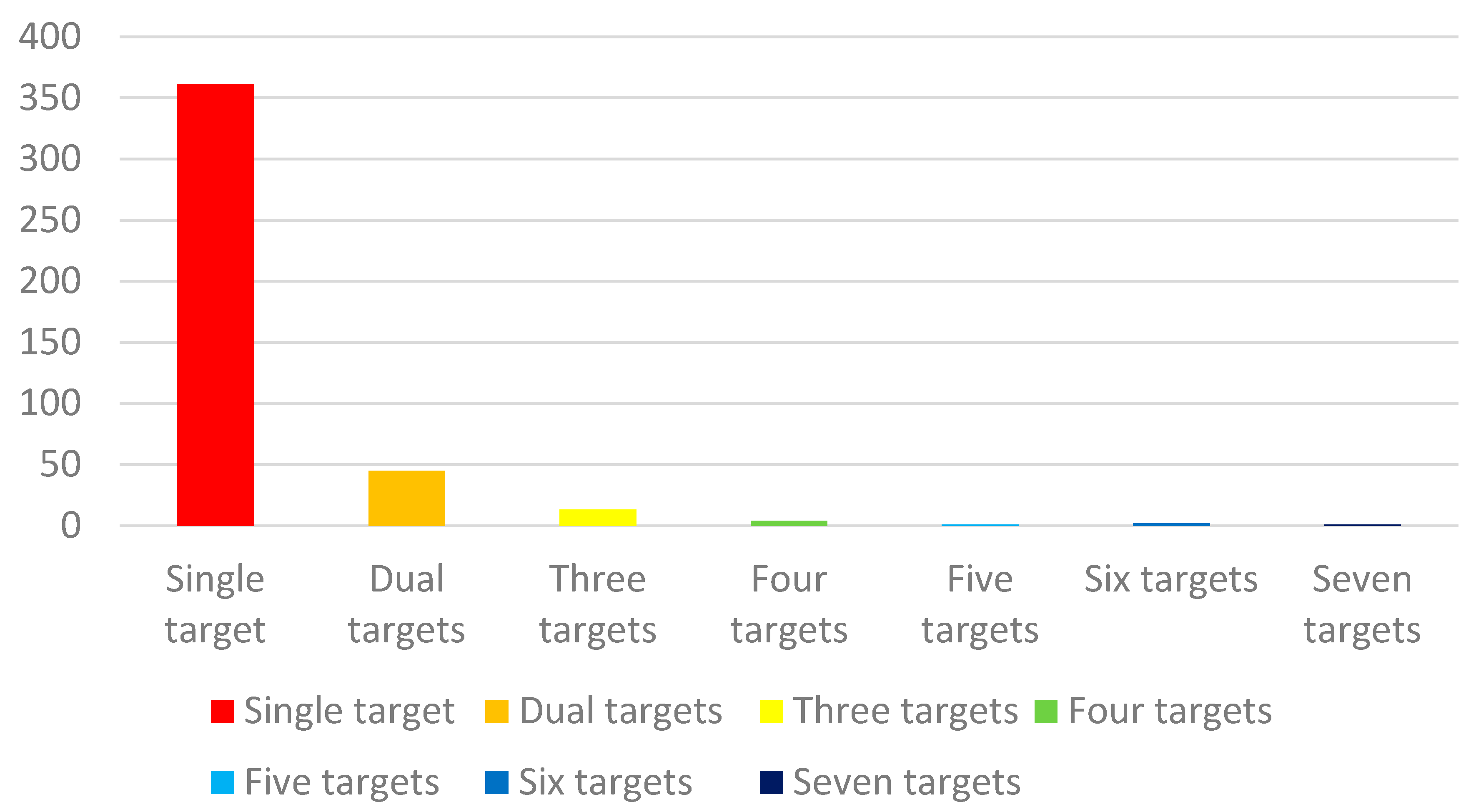
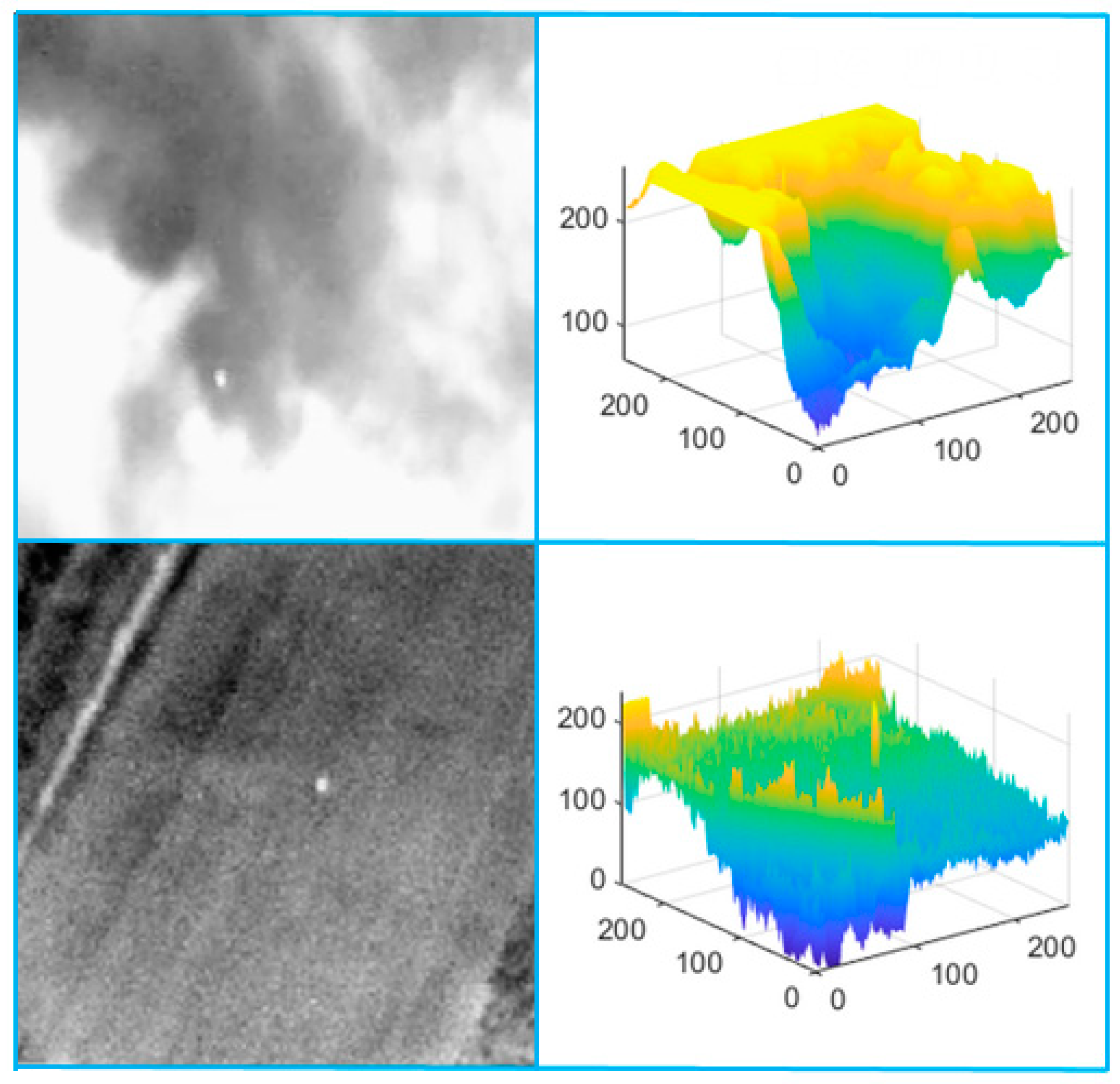
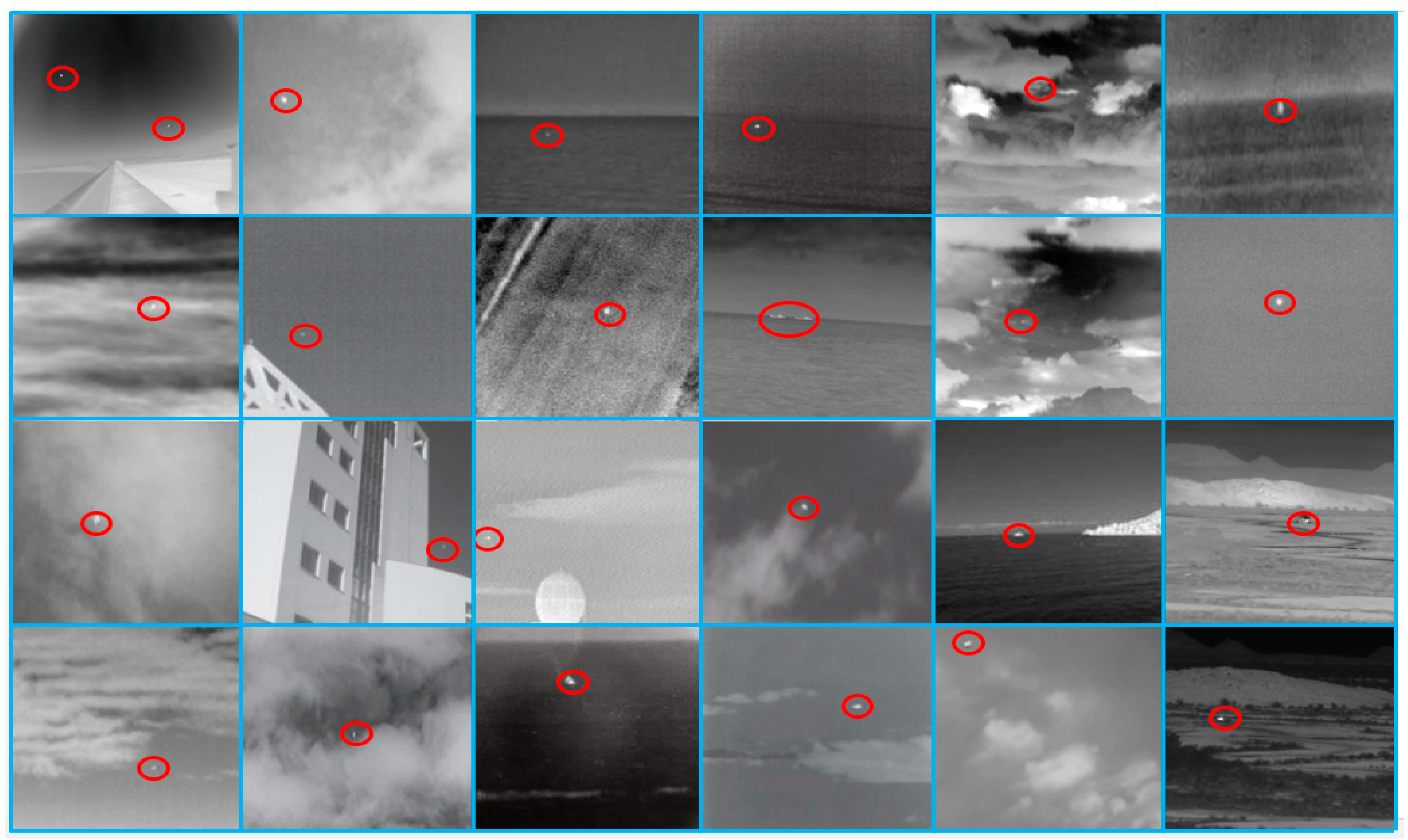
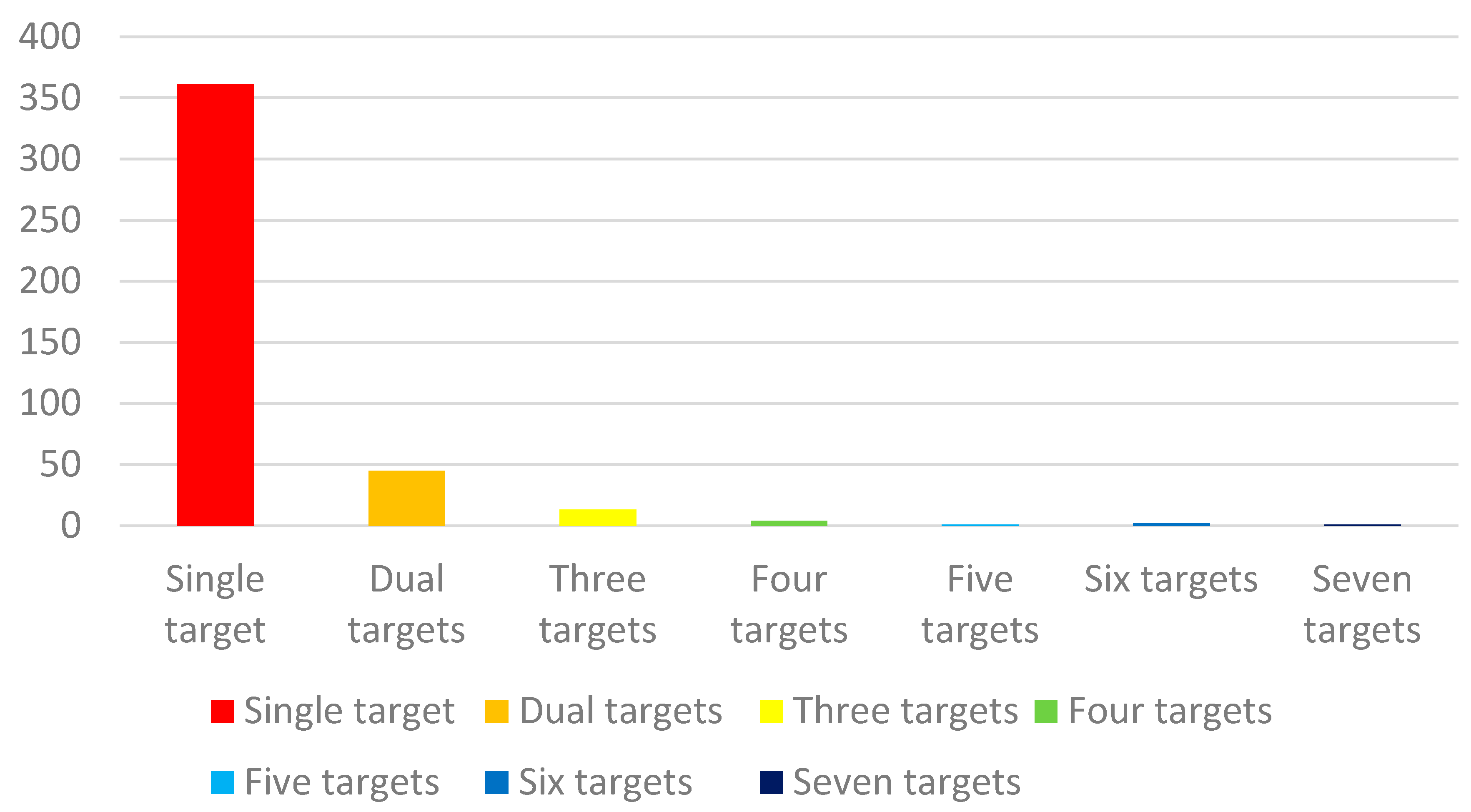
Figure 6 shows a preview of the dataset in which the target has low contrast with the background and is easily swamped by a complex background with heavy clutter. Here, even with the naked eye, such targets are hard to discern from the background. Most images in the dataset contain only one target, and only a few images contain multiple targets. The dataset is classified according to the target number, and
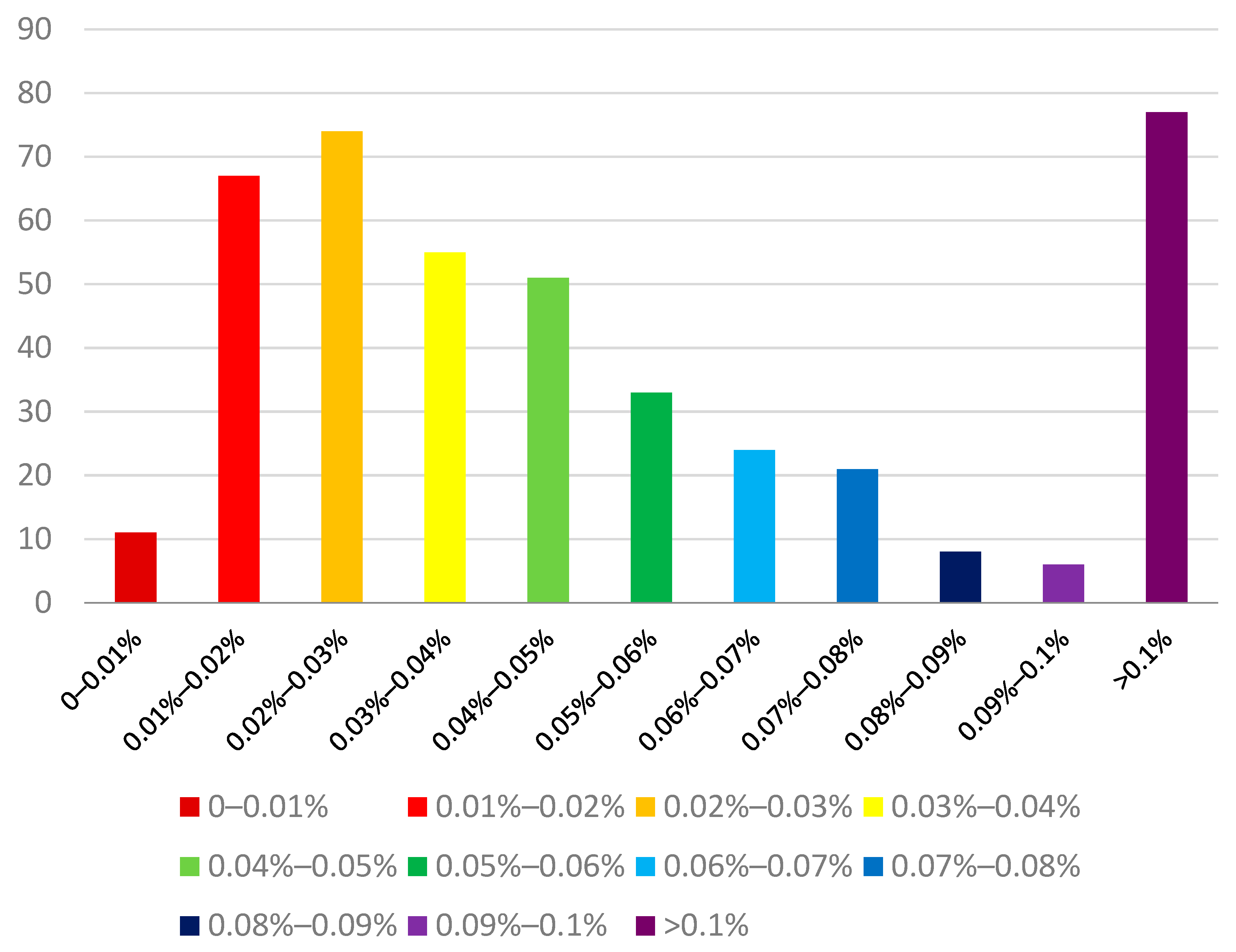
Figure 7 is obtained. Approximately 64% of these targets are only 0.05% around of the whole image. The vast majority of the targets are less than 0.1% and are classified by the percentage of targets to obtain
Figure 8. Only 35% of the targets are the brightest in the image, so most of the targets in this dataset are very small and faint.
4.2. Assessment Indicators
CNN-based algorithms [
18,
19,
36] mainly use pixel-level evaluation metrics such as IoU and accuracy. These metrics are mainly focused on target shape evaluation. Algorithms based on local contrast metrics mainly use Pd and Fa as the evaluation metrics to assess the detection results. In the DNANet [
22] algorithm, the three metrics IoU, Pd and Fa are combined as evaluation metrics. This is because Pd and Fa can evaluate the detection results more intuitively, and IoU is more indicative of the difference between the size and coordinates of the detected target and the ground truth. Therefore, IoU, Pd, and Fa are used as evaluation indicators in this paper.
- (1)
IoU (Intersection of Union) is a standard to measure the detection accuracy, which can evaluate the shape detection ability of the algorithm. The result can be obtained by calculating the overlap between the predicted target and the ground truth value divided by the union of the two regions, where Area of Overlap represents the overlap and Area of Union represents the union part:
- (2)
Detection rate Pd:Pd measures the accuracy of target detection by comparing the detected results with ground truth to Pd, where the number of targets detected is Np and the number of ground truths is Nr:
- (3)
False alarm rate Fa:FA is used to evaluate the degree of misjudgement. The result is obtained by calculating the ratio of mispredicted pixels to all pixels of the image, where PF is the misjudged pixels and PA is all pixels in the image:
- (4)
Mean Intersection over Union:mIoU is an index used to measure the accuracy of image segmentation. The higher the mIoU, the better the performance. Intersection is the number of pixels in the intersection area, and combine is the number of pixels in the union area.
4.3. Quantitative Analysis
We compared the algorithms presented in this paper with the current state-of-the-art algorithms, including TLLCM, tri-layer local contrast measure [
5]; WSLCM, weighted strengthened local contrast measure [
6]; RIPT, teweighted infrared patch-tensor model [
7]; NRAM, non-convex rank approximation minimization joint [
8]; PSTNN, partial sum of the tensor nuclear norm [
9]; ALCNet, attentional local contrast networks [
19]; DNANet, dense nested attention network [
22]; MDvsFAcGAN, missed detection vs. false alarm; conditional generative adversarial network [
36]; MSLSTIPT, multiple subspace learning and spatial-temporal patch-tensor model [
37]; and MPANet, multi-patch attention network [
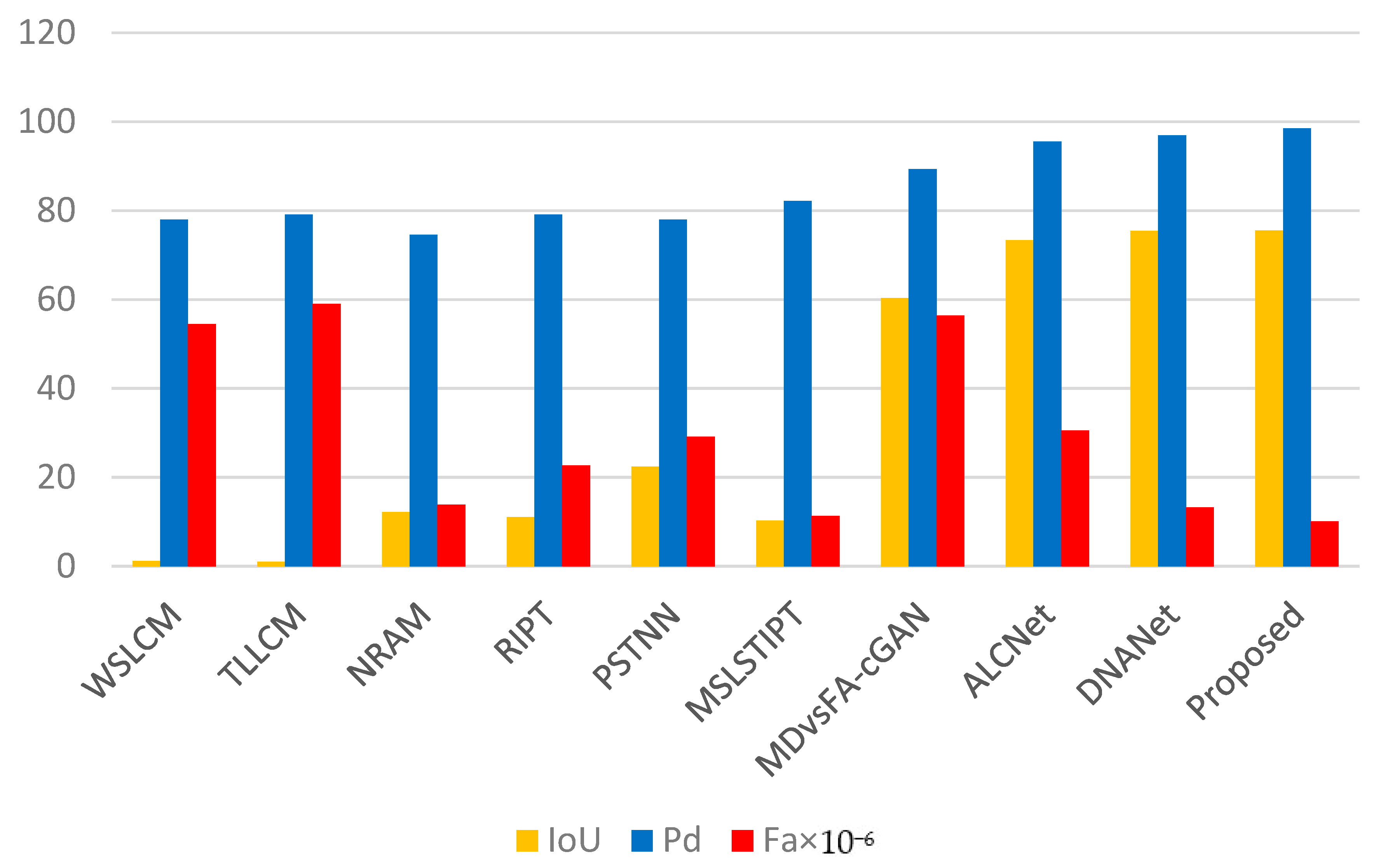
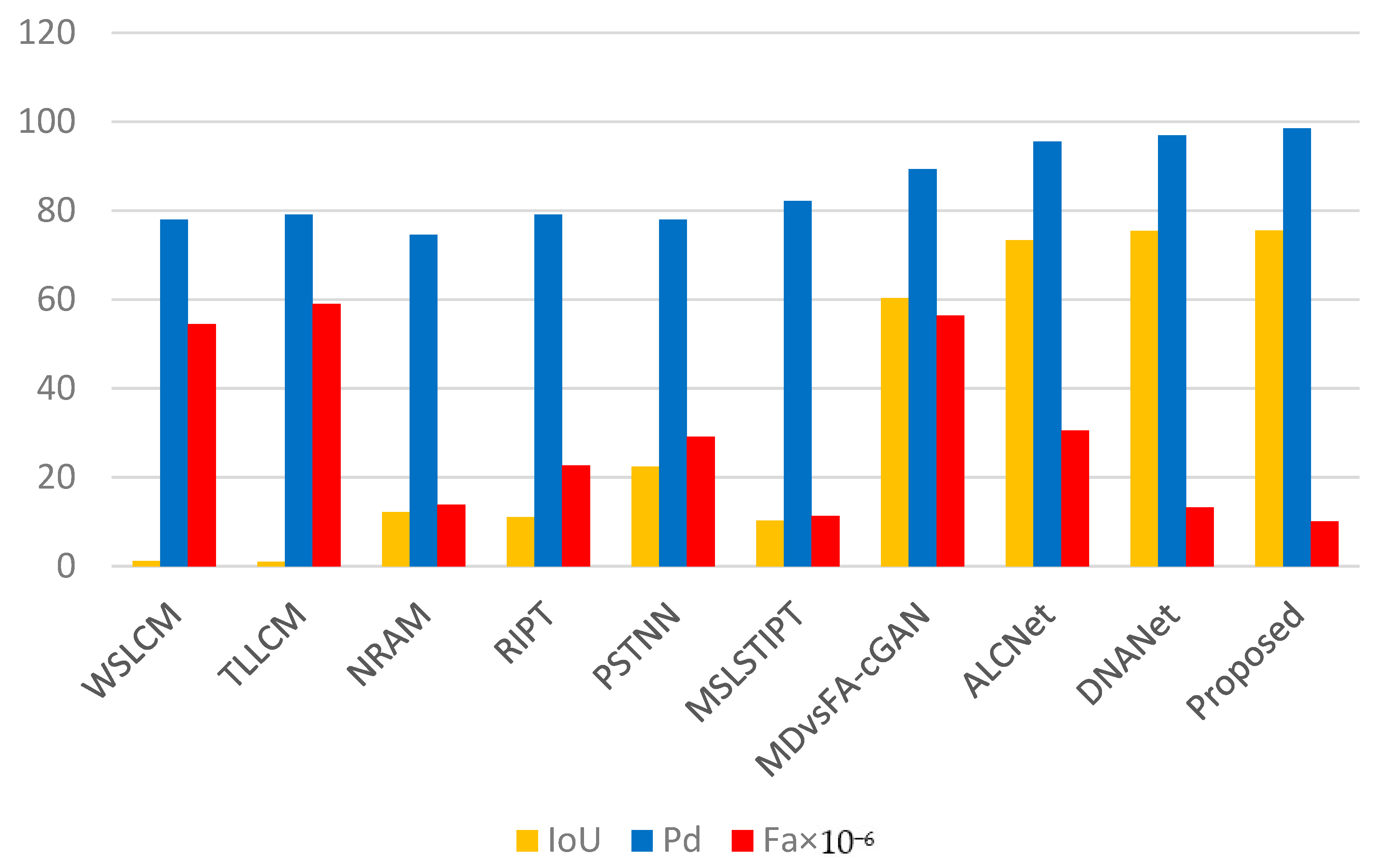
38]. These algorithms and our algorithm were tested on the NUAA–SIRST dataset, and the obtained quantitative and qualitative results are compared and analysed. The quantitative analysis focuses on the changes in the three metrics of IoU, Pd and Fa between the algorithms proposed in this paper and those mentioned above, so as to see more intuitively how much the detection effectiveness of the algorithms has improved, as shown in
Table 3 and
Figure 9.
Table 3 shows an improvement in the overall rate. Compared with current advanced methods, the algorithm proposed in this paper makes a certain improvement in IoU over the algorithm DNANet, indicating that our algorithm has a strong ability to describe the target contour on the basis of the detected target. The stronger the ability to describe the target contour, the easier it is to determine the type of small targets. Thus, it improves the perception ability of the autonomous system and provides more judgment basis for the decision-making of the autonomous system.
The 1.14% improvement in detection rate for Pd over DNANet proves that the improvements made by our algorithm over the original algorithm are effective. The improvement in the most important metric, Pd, demonstrates that we improved the detection capability of the algorithm by augmenting it with tiny and faint targets while not misclassifying small target analogues and leading to higher false alarm rates. The improvement in the detection rate Pd greatly ensures the safe operation of the autonomous system.
The false alarm rate Fa is reduced by 2.4 × 10−6 compared with DNANet, and the input image is processed by our algorithm, and for some small target analogues that are easily misjudged, the characteristics similar to those of the small target are weakened, thereby reducing the misjudgement of the small target.
Combining these three indicators, it is verified that our algorithm can not only improve detection while ensuring a low false alarm rate after enhancing the input image, it also has a strong ability to describe the target contour. The application of our algorithm to an autonomous system can effectively improve the perception capability of the self-help system.
4.4. Quantitative Analysis
Qualitative analysis mainly analyses whether the image enhancement module proposed in this paper solves the problems of DNANet and verifies our theory in
Section 3. We more intuitively show whether our algorithm will detect small targets that are difficult to detect and whether the recognition effect in difficult situations will be better than DNANet.
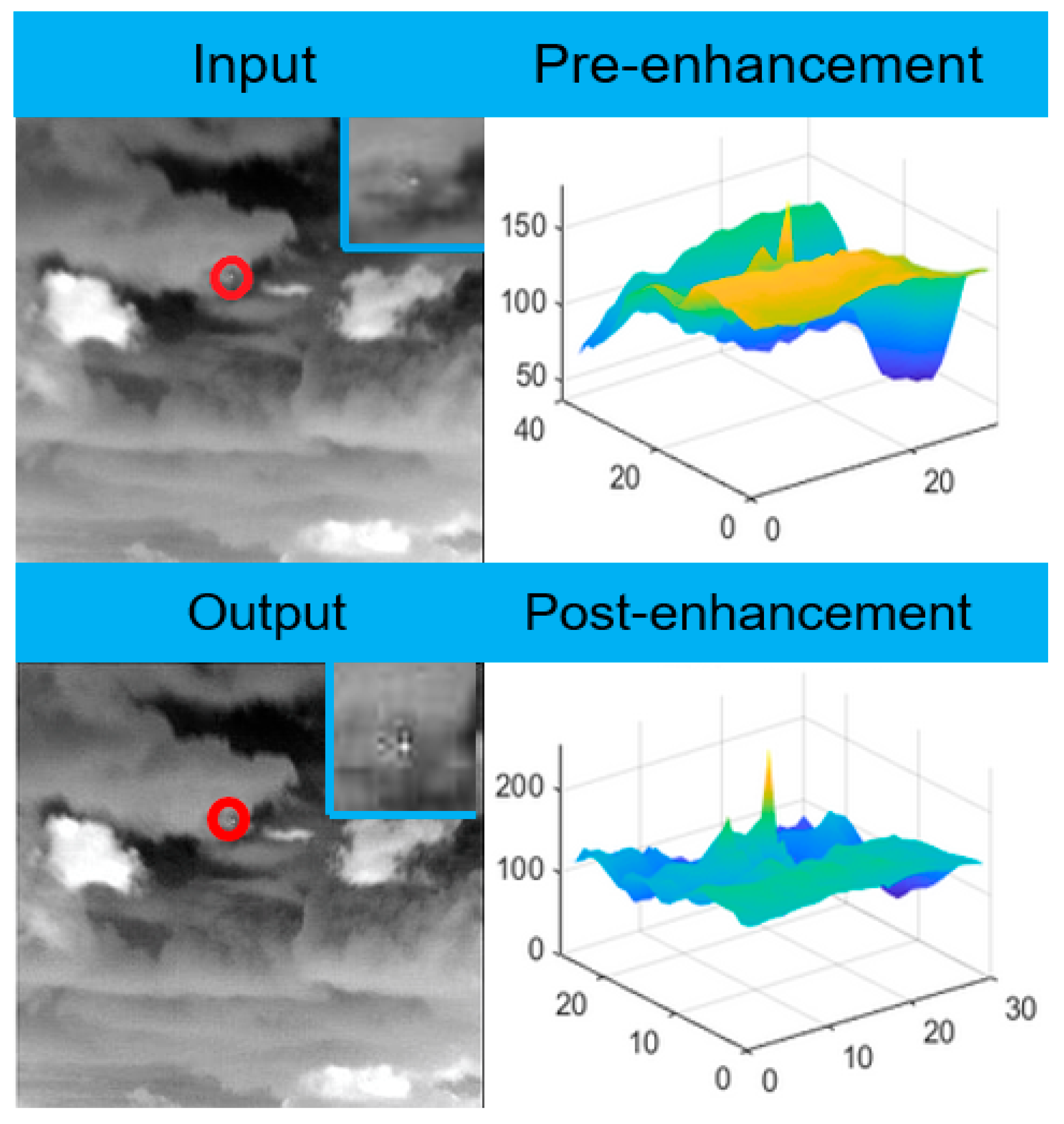
4.4.1. Enhanced Target Characteristics
A solution to the problem of resolving detection failure caused by small targets submerged by background noise or noise is proposed in
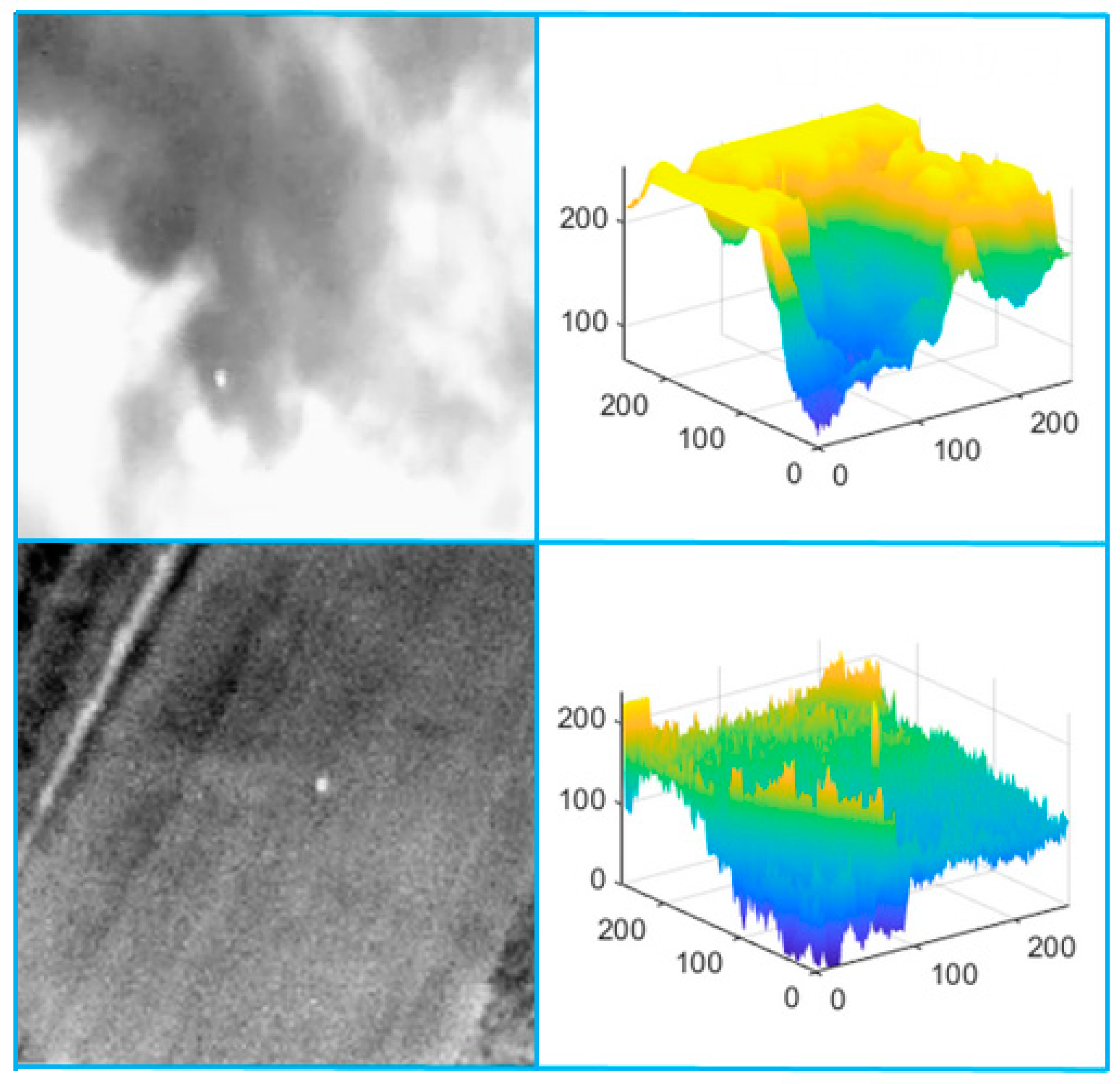
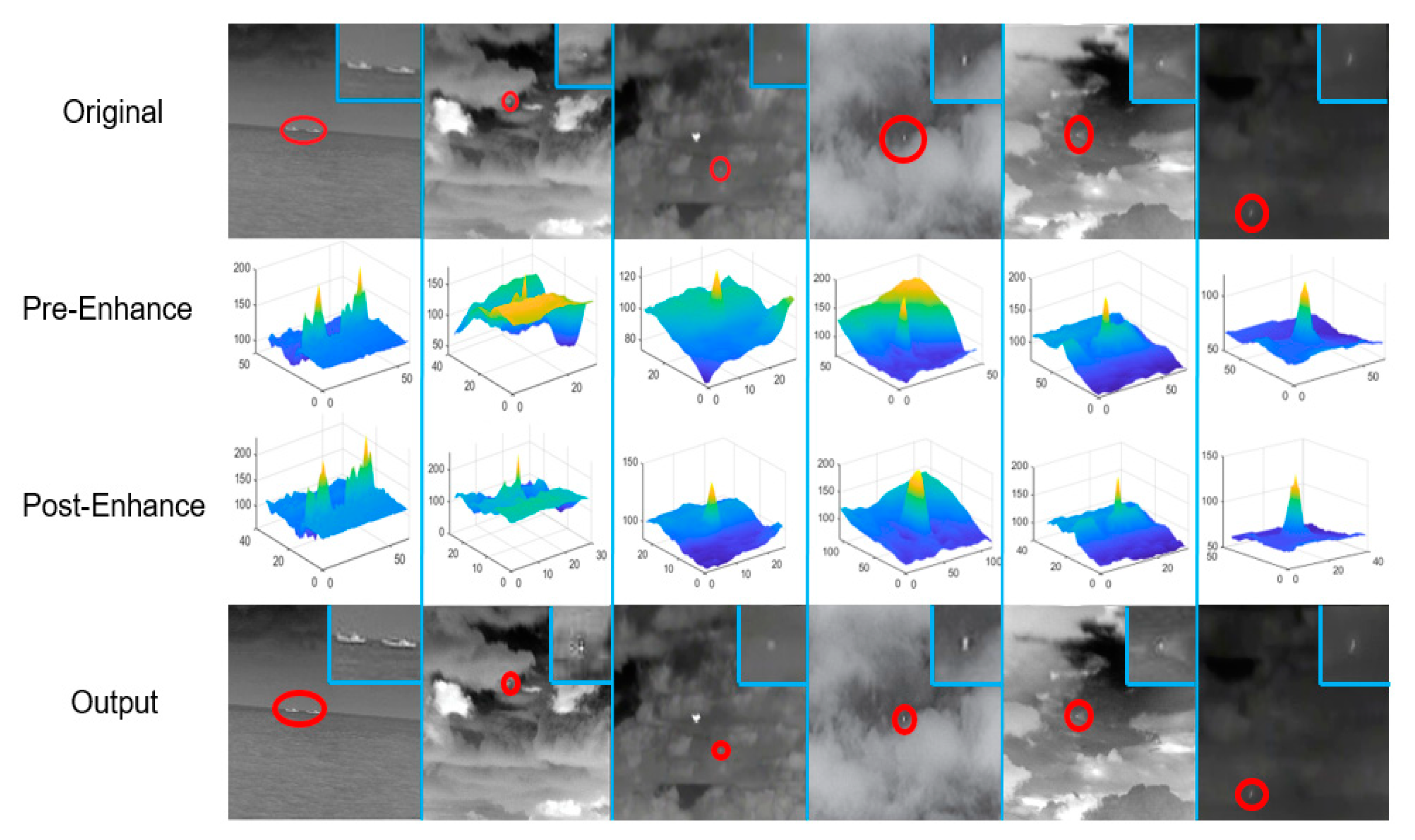
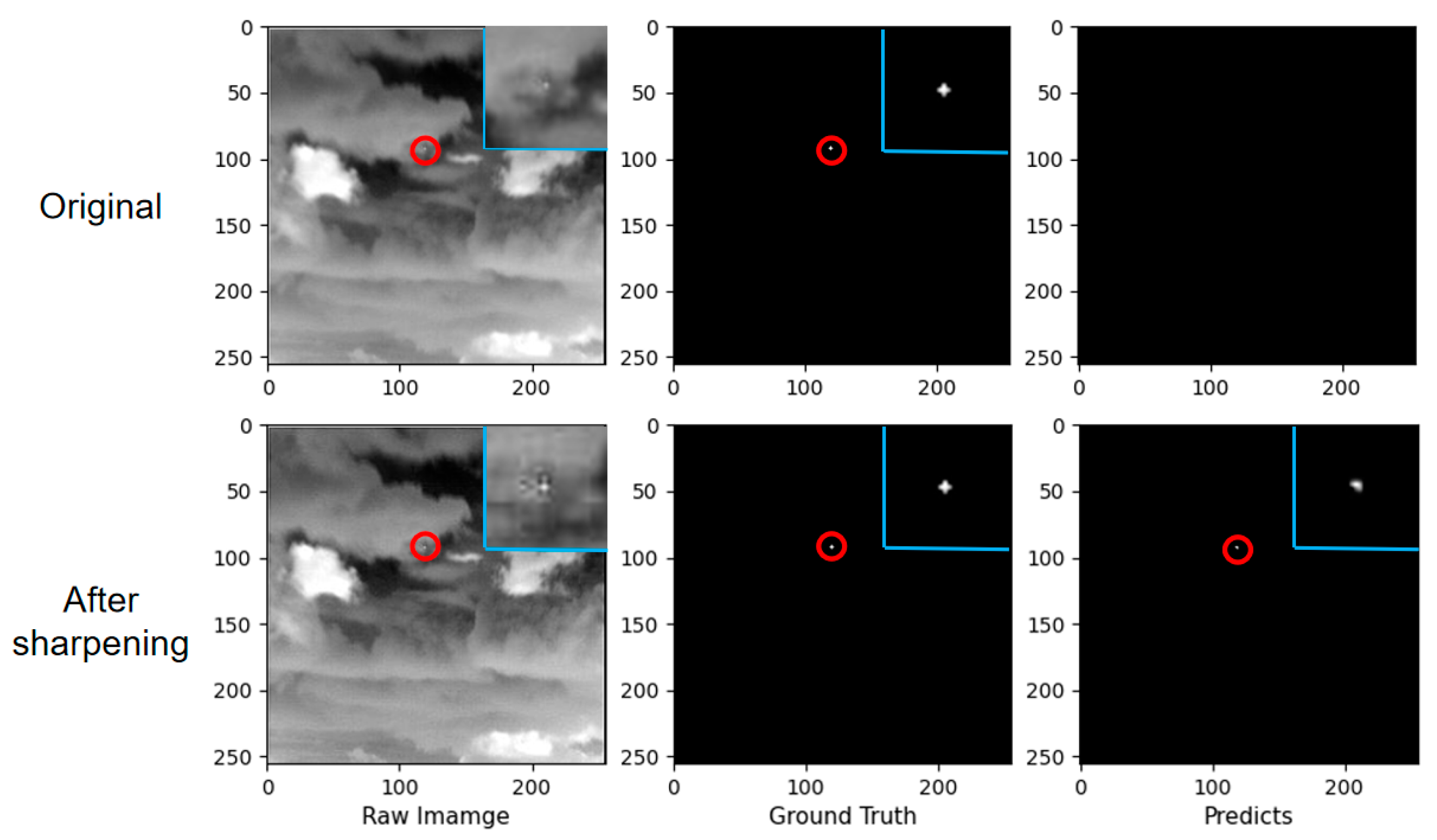
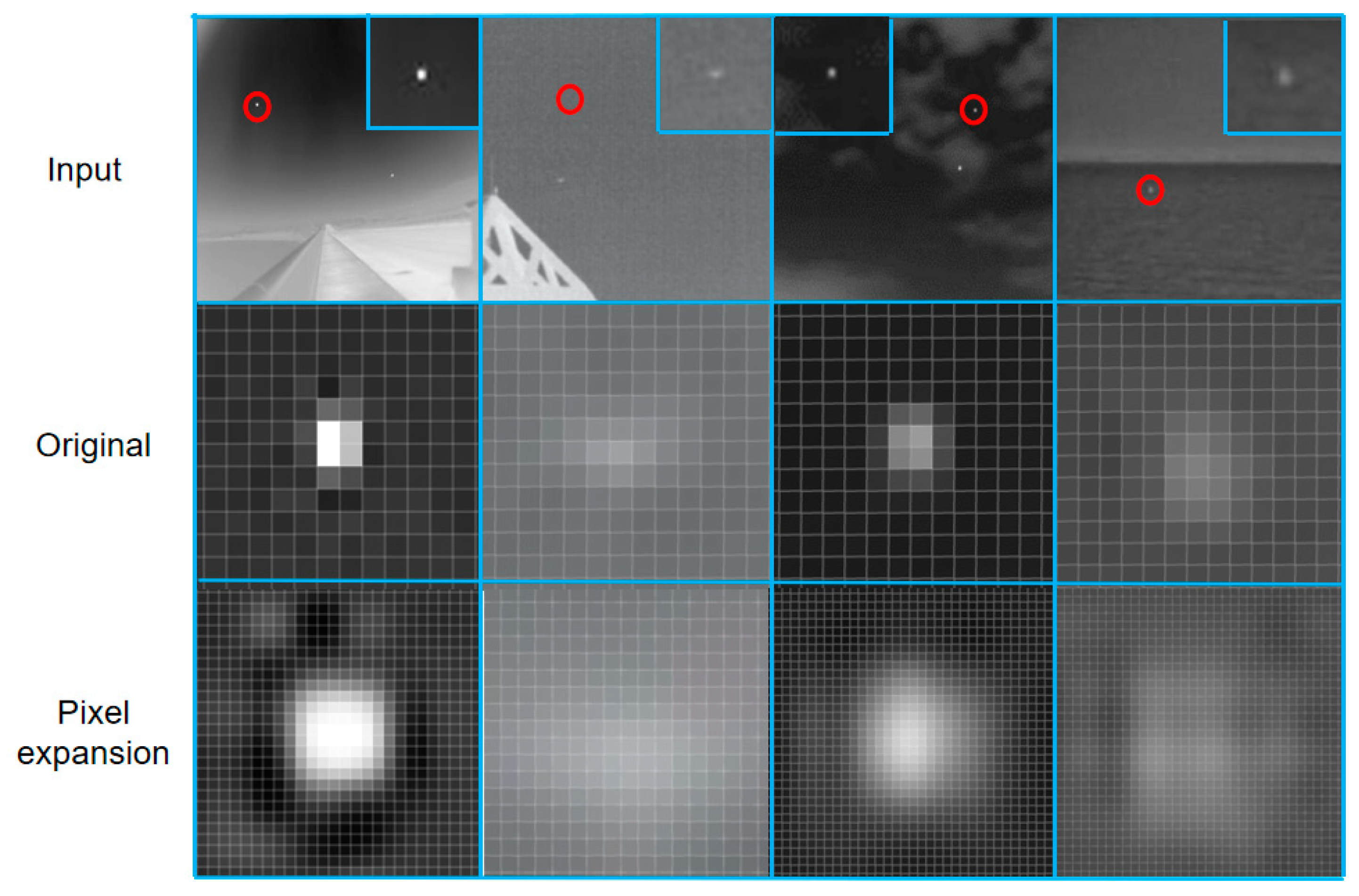
Section 1. We first perform sharpening filtering on the input image to enhance the edge information of the image. As shown in
Figure 10, the feature maps before and after enhancement show that the peaks are improved after enhancement and the surrounding background information is suppressed, proving that the features of the small target itself are enhanced and thus easier to detect. The output also shows that the brightness of the target has improved and the edges are clearer than in the original image.
Figure 11 also shows that after sharpening, the brightness of the small target is increased and the edge information is enhanced, making it easier to detect than the original image. This confirms the validity of the method mentioned in
Section 3 and thus solves the above problem.
4.4.2. Expanded Target Pixels
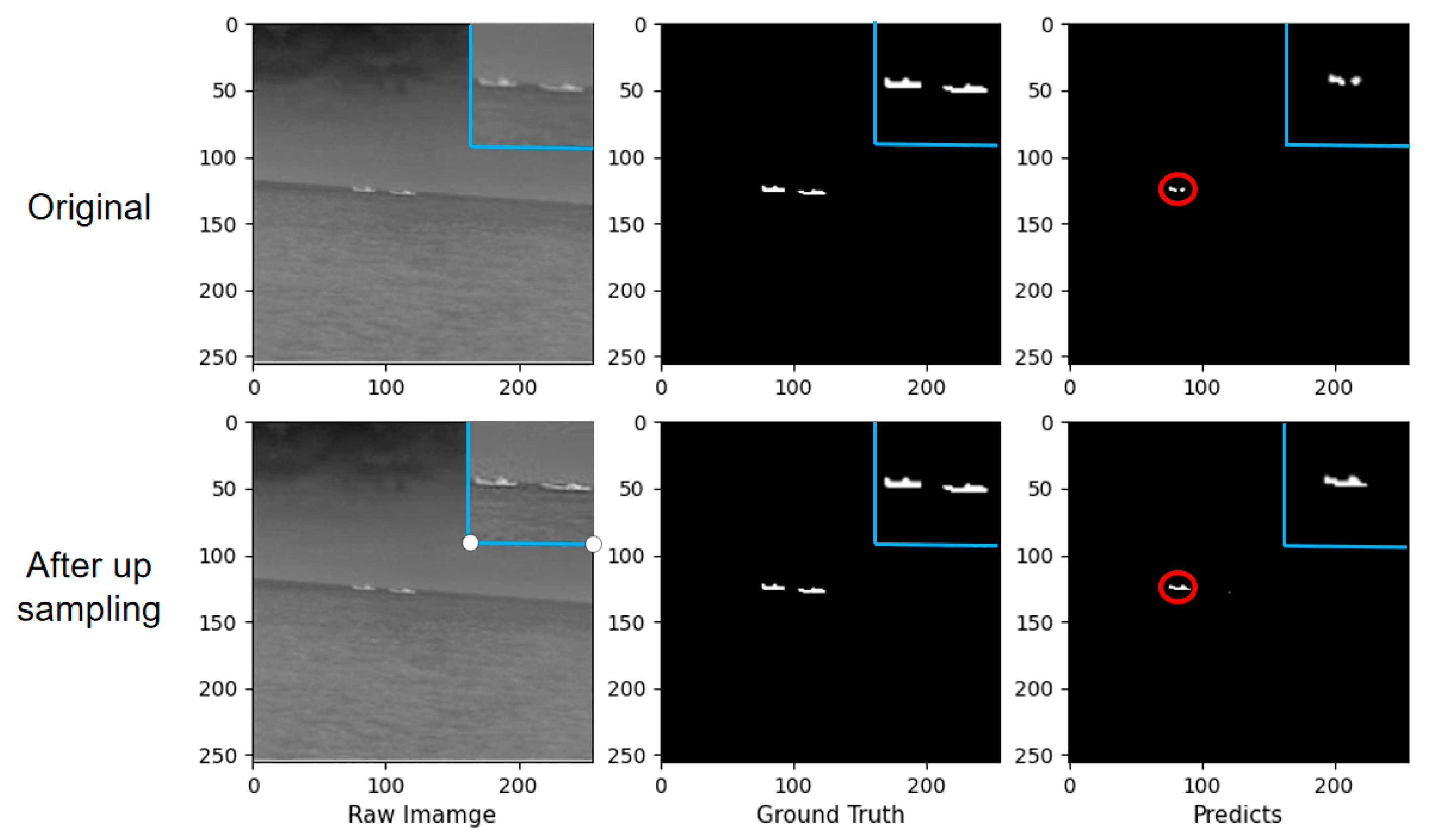
The problem with the target proposed in the first section is that it has a very small proportion compared with the background, which leads to the failure of detection. As shown in
Figure 12, we perform pixel expansion on the small target by upsampling based on the enhancement of the small target, and the target becomes rich in content. As can be seen in
Figure 13, the recognition of the expanded target pixels gives a result that is closer to the true value of the silhouette and improves the accuracy of the recognition compared with the original image. This shows that our proposed method can solve this kind of problem ideally.
4.4.3. Comparison of Test Results
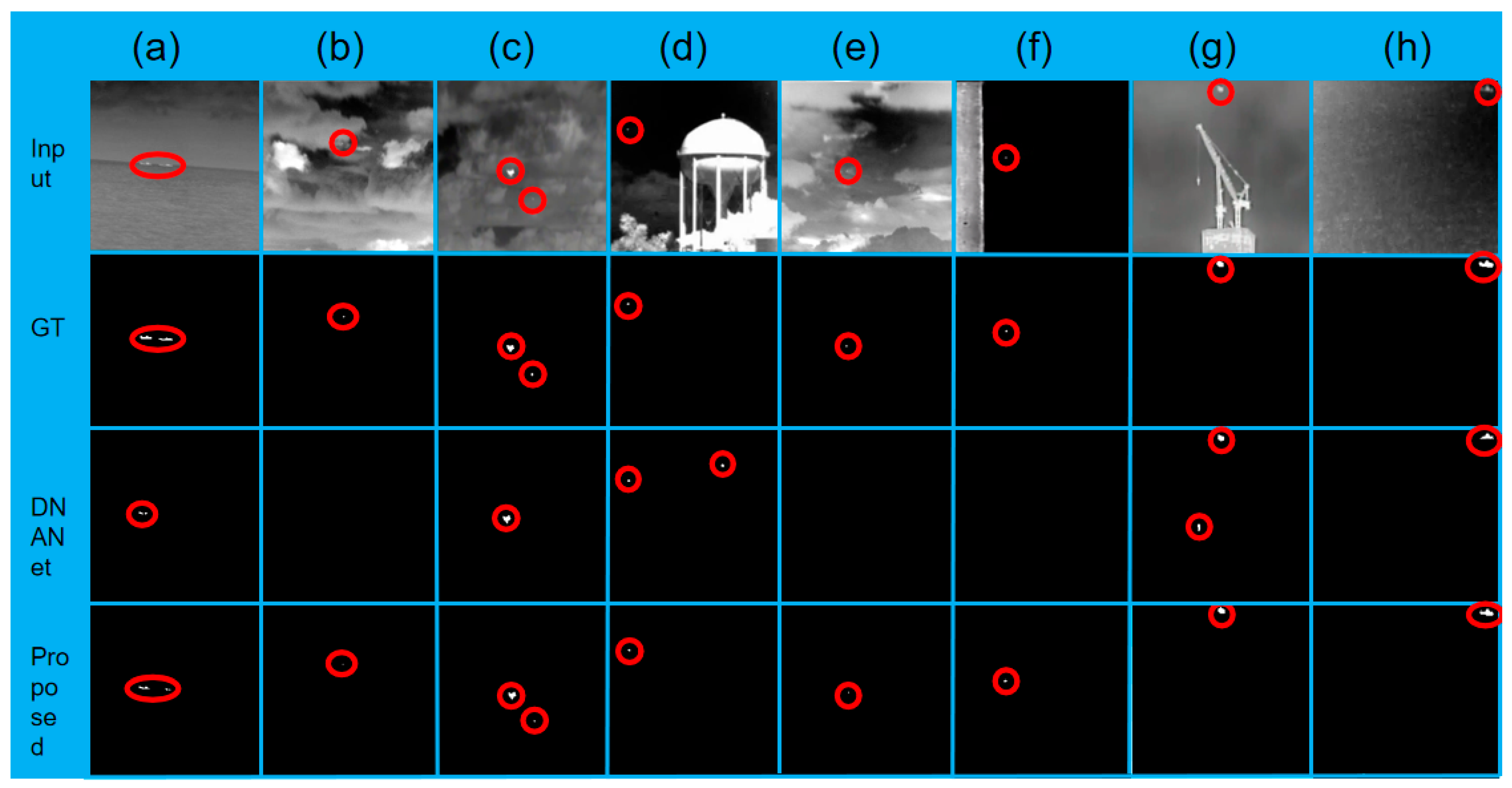
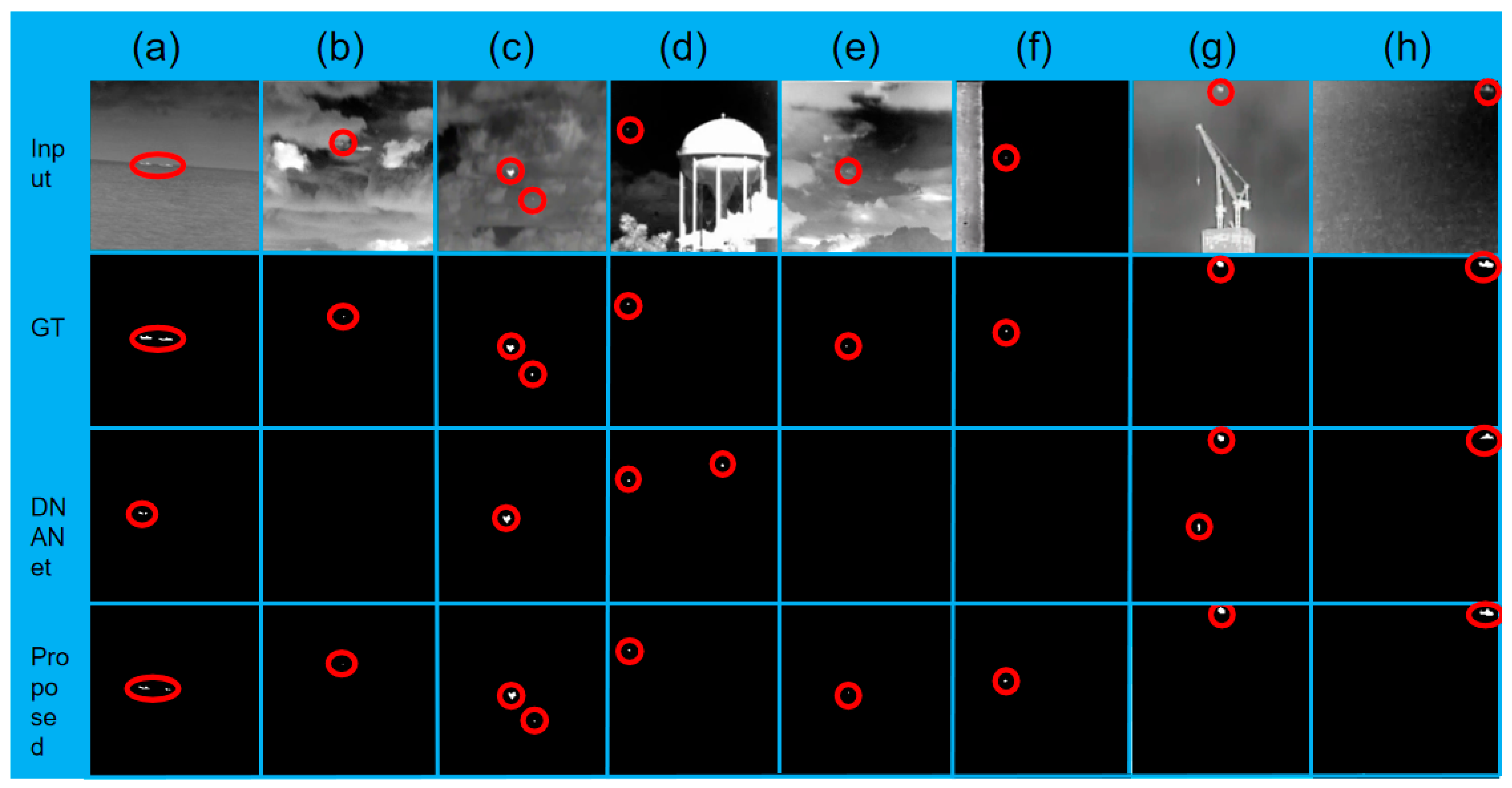
As shown in
Figure 14, we compare the detection results after target feature enhancement and pixel expansion with those for the DNANet algorithm. It can be seen that there is an overall improvement in detection after the processing of our algorithm.
The results show that in row (a), DNANet has a problem of inadequate recognition of this target, recognizing only part of the target due to the fact that some pixel values at the edges of the target are slightly below the banalization threshold ε. The number of pixels that meet the constraints is small. After processing by our algorithm, the pixel values of the target edges were increased and the pixel points were expanded, resulting in some improvement in the detection results.
In row (b), (e), (f), which is a typical example of a very small and dim target, the human eye also has difficulty finding this target from the background, and DNANet does not recognize such targets well enough to miss them, resulting in a decrease in the detection rate Pd. However, after processing by our algorithm, it is possible to enhance such very small targets, i.e., point targets, which are difficult to detect. The pixel values of the target edges are first increased so that the small targets stand out more compared with the background, and then the pixels of the small targets are expanded so that they are easier to detect, enabling the recognition of such targets and resulting in an increased detection rate.
From line (c), it can be seen that there are two small targets in the original image, one of which is larger and brighter, and the other is very small and faint. It is clear that DNANet can achieve accurate recognition for the larger and brighter target, but it has difficulty detecting the other target. In (c), a comparison shows that DNANet does have this problem and that our algorithm can solve it effectively.
In row (d), (g), it is the other small target analogues in the graph that DNANet misidentifies, resulting in a higher false alarm rate. This is because the analogue has similar features to the small target in the original image, but after our algorithm has increased its edge pixel value and expanded the pixels, it weakens its similar features to the small target, allowing the algorithm to detect it without false positives, thus reducing the false alarm rate.
To sum up, our proposed algorithm can effectively solve the two problems of (1) background clutter and noise swamping small targets, leading to detection failure and (2) targets accounting for too little compared with the background, leading to detection failure, thus improving the reliability and robustness of the algorithm in complex environments and making an important contribution to the improvement of the sensing capability of autonomous systems.
Table 4 corresponds to the columns in
Figure 13. We can see that compared with DNANet, the proposed algorithm achieves more satisfactory results for mIoU, which proves that the proposed algorithm has better segmentation performance.
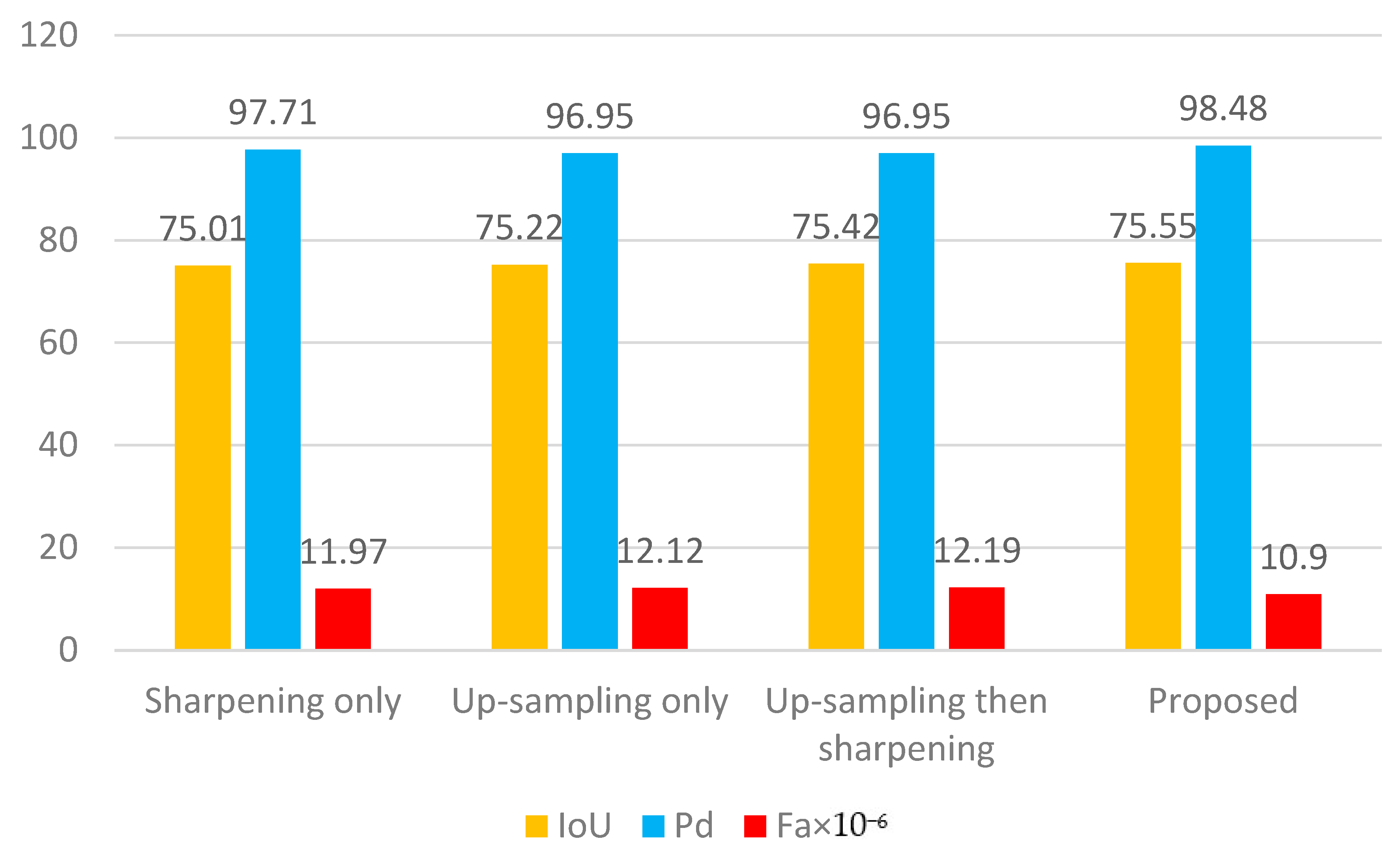
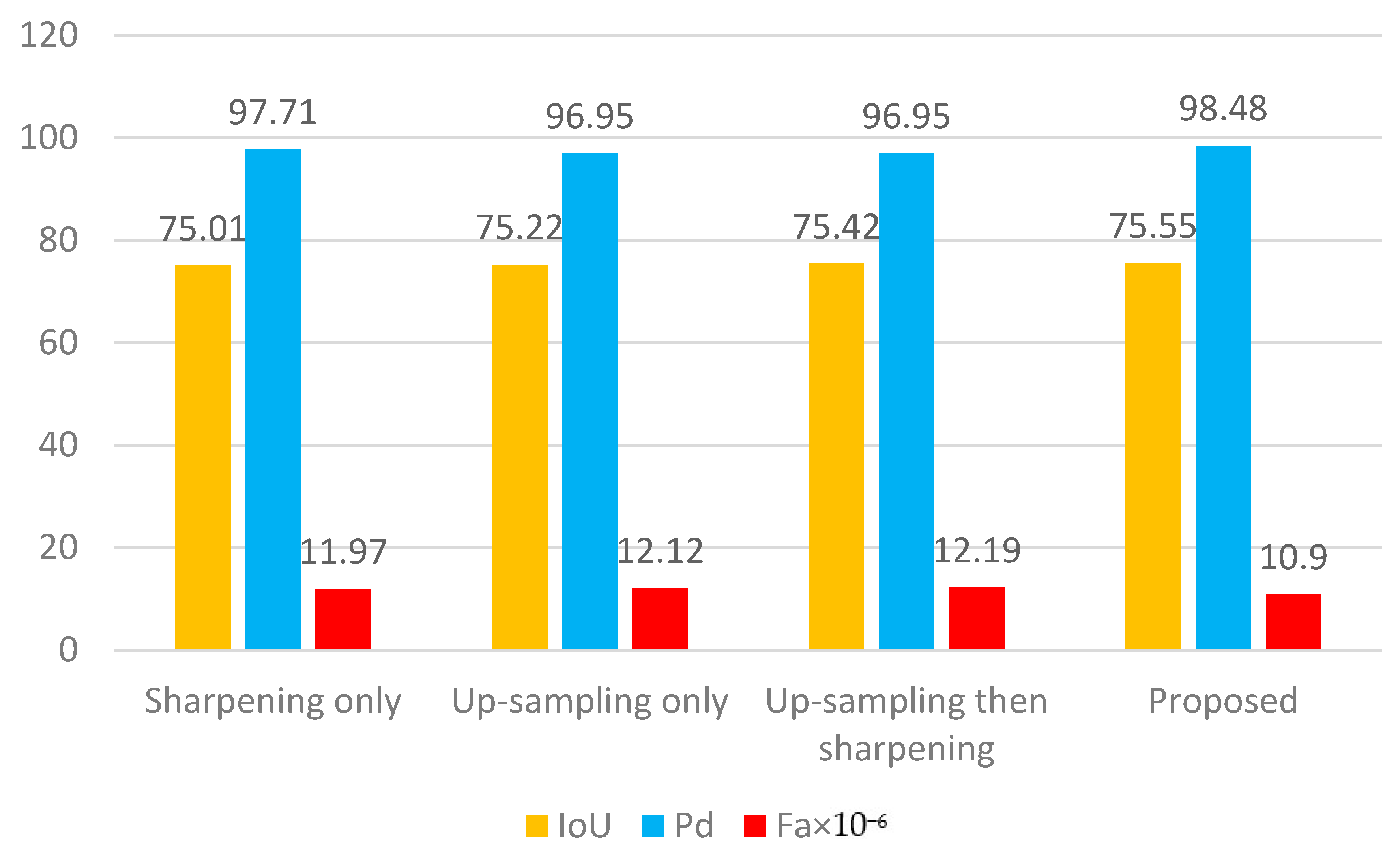
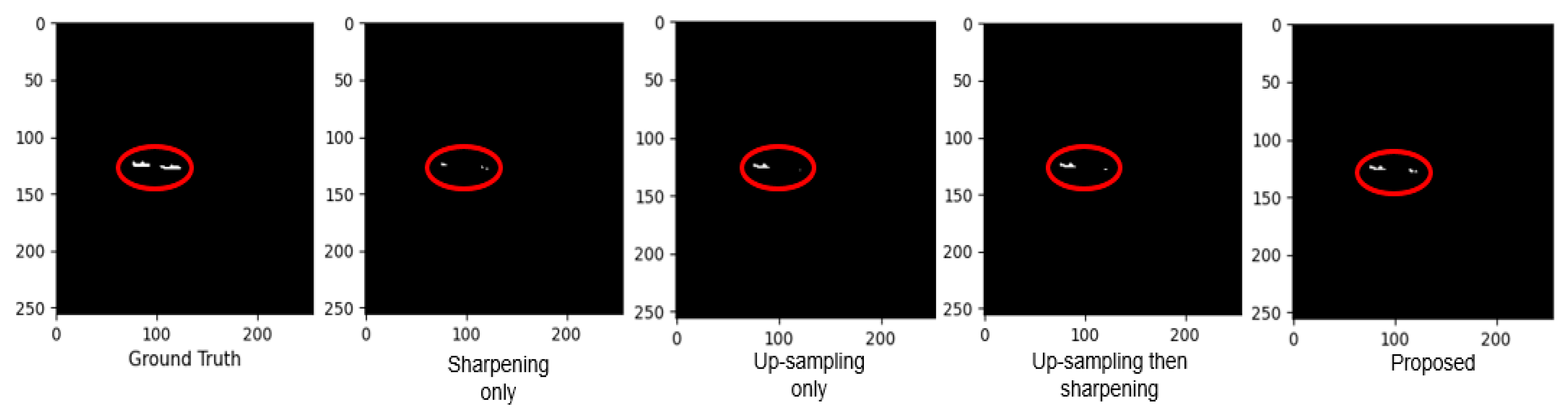
4.5. Ablation Experiments
In this paper, the method of sharpening first and then upsampling is adopted. The purpose is to first use sharpening spatial filtering to improve the pixel value of the target edge and to then expand the pixel points of the enhanced image, so as to increase the number of pixels that meet the constraint conditions of g(m_0, n_0) = g(m_1, n_1) = 1 and achieve the recognition of small and dim targets and improve the detection effect. To test our idea, we performed the following ablation studies in this section.
We compared the algorithm in this paper with the three methods using only the sharpening spatial filter, upsampling only and upsampling first and then using the sharpening spatial filter; we further explain why the sharpening first and then upsampling approach is used:
- (1)
Use of sharpening spatial filters only: Only the mutation information, details and edge information of the image are enhanced, without upsampling.
- (2)
Upsampling only: cubic interpolation on the matrix of the input image using bicubic filtering only to increase the target pixel.
- (3)
Upsampling and then using the sharpening spatial filter: first upsampling the image to increase the target pixels and then using the sharpening spatial filter.
According to the ablation study in
Table 5, the detection rate Pd is reduced by 0.77%, the IoU by 0.54% and the false alarm rate Fa by 1.07 × 10
−6 if only the sharpening is performed using the sharpening space filter. This is because if the image is only sharpened, although the pixel value of the edge of the small target will be increased, when the target proportion is extremely small, the number of pixels that meet the constraints is still not enough; therefore, this method has certain limitations.
If the image is only upsampled, the detection rate Pd decreases by 1.53%, the IoU decreases by 0.33%, and the false alarm rate Fa increases by 1.22 × 10−6. This is because upsampling the image only expands the target pixels compared with the unenhanced target, but there is no increase in the number of pixels for which the small target satisfies the constraints, i.e., the small target itself is not enhanced. The detection rate Pd is not improved in this way, and instead, targets are detected that were not easily misidentified before.
Therefore, we combined the two approaches, upsampling the image first and then sharpening it. From the results, it can be seen that there is no certain improvement in the detection rate Pd or false alarm rate Fa compared with upsampling only, except for a small improvement of 0.20% in IoU. However, it can be seen from sharpening only that the use of the sharpening spatial filter enhances the features of small targets to improve detection, and the reason there is no improvement here is that when the input image is upsampled and then sharpened, the original pixel values that do not satisfy the constraints are expanded. By sharpening the image afterwards, only the pixel values at the edges of the target are enhanced, so the pixels that satisfy the constraint are not expanded, which makes the result unsatisfactory.
To sum up, we adopt the method of upsampling with sharpening spatial filter first. As can be seen in
Figure 15 and
Figure 16, this approach we took achieved optimal results. By sharpening the input image first, the pixel values of the target edges are increased, thus enhancing the features of small targets. After that, the upsampling operation will further expand the pixels on the basis of the enhanced small target, that is, increase the number of pixels meeting the constraints, so as to fully improve the number of pixels meeting the constraints and improve the detection ability. These two methods, when combined with the right thinking, achieve the desired results.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}