1. Introduction
The accurate positioning, navigation, and timing (PNT) services can be provided by the Global Navigation Satellite System (GNSS), and it has been widely used in many areas such as agriculture [
1], weather monitoring [
2], time and frequency transfer [
3], and disaster monitoring [
4]. As of the end of April 2022, there are about 120 GNSS satellites, including GPS, GLONASS, Galileo, BDS-2, BDS-3, and QZSS systems, which can provide PNT services to users around the world [
5,
6,
7]. The available satellites, frequency, and PRN for each system are listed in
Table 1. For GNSS, the observation data quality on the receiver side directly determines the result of precise data processing at the GNSS server and user end. The positioning performance at the GNSS user side plays a key role in the quality of GNSS service, and the broadcast ephemeris directly affects the performance of real-time navigation and positioning. The stations located in the Asia-Pacific region can receive the signals broadcasted by five navigation satellite systems at the same time. Therefore, it is worthy to investigate and evaluate the performance of GNSS observation data quality, broadcast ephemeris, and positioning performance in the Asia-Pacific region.
For the observation data quality of GNSS: the BDS-3 satellites signals were evaluated by Zhang et al.; the B1I/B2I/B3I signals of the BDS-2 satellites, L1/L2/L5 of the GPS Block IIF satellites, and E1/E5a/E5b of the Galileo satellites are also evaluated for comparison in their study [
8]. The observation data quality of the BDS-3 signal was studied and analyzed by Yang et al. [
9]. The signal quality of BDS-2 and BDS-3 satellites was evaluated by Yan et al. [
10]. The observation data quality and positioning performance of BDS/QZSS satellites were studied by Bu et al. [
11]. The data quality of BDS/GPS/GLONASS satellites was investigated by Zuo et al. [
12]. The signal quality of Galileo/BDS/GPS satellites was evaluated by Tian et al. [
13]. It can be seen that previous studies about signal quality mainly focus on single and dual systems; the investigation and comparison of observation data quality among five GNSS systems in Asia-Pacific regions are limited and still needs further study.
In the context of GNSS broadcast ephemeris accuracy assessment, the GPS/GLONASS/BDS/Galileo/QZSS broadcast ephemeris was evaluated by Montenbruck et al. [
14], but the BDS-3 satellite constellation had not been built at that time. After the BDS-3 satellites were launched, their broadcast ephemeris orbit and clock offset accuracy were evaluated by many scholars [
15,
16], and the comparison of broadcast ephemeris orbit and clock offset accuracy between BDS-2 and BDS-3 was also conducted [
17]. However, with the modernization of GNSS satellites, the performance of broadcast ephemeris orbit and clock offset accuracy of five GNSS systems satellites is still unknown and unrevealed, it is urgent to conduct a comprehensive evaluation and comparison of the broadcast ephemeris performance for five GNSS systems satellites.
In terms of multi-GNSS positioning, the contribution of QZSS to the single-frequency PPP of GPS/BDS/GLONASS/Galileo satellites was studied by Hong et al. [
18]. The positioning performance of BDS/QZSS in the Asia-Pacific region was evaluated by Bu et al. [
11]. The precise positioning performance of QZSS and GPS in the Asia-Pacific region was investigated by Li [
19]. The positioning performance of BDS-2/BDS-3 in the Asia-Pacific region was analyzed by Cao et al. [
20]. It can be seen that the previous studies about PPP in the Asia-Pacific region are mainly focused on single or dual systems, while the PPP performance of multi-GNSS in the Asia-Pacific region is still limited.
In this contribution, multi-GNSS (GPS/GLONASS/Galileo/BDS-2/BDS-3/QZSS) observation data quality, broadcast ephemeris orbit, and clock offset performance and PPP performance in the Asia-Pacific region are investigated in detail. Based on the observation data from 10 Asia-Pacific MGEX stations, multi-GNSS broadcast ephemeris and precise satellite orbit and clock offset products, the observation data quality, broadcast ephemeris orbit, clock offset performance, and PPP performance in the Asia-Pacific region are evaluated and compared from DOY 283 to 289, in 2021. This paper is organized as follows: after this introduction, the observation data quality of five GNSS systems from 10 stations located in the Asia-Pacific region are investigated and analyzed in terms of carrier-to-noise-density ratio(C/N0) and pseudorange multipath in
Section 2. The accuracy of the broadcast ephemeris orbit and clock offset and signal-in-space ranging errors (SISRE) of the five systems is investigated, evaluated, and compared in
Section 3. The static and kinematic PPP performance of five GNSS systems in the Asia-Pacific region is evaluated and compared from convergence time and positioning accuracy in
Section 4. Finally, the conclusions are presented in
Section 5.
2. Data Quality
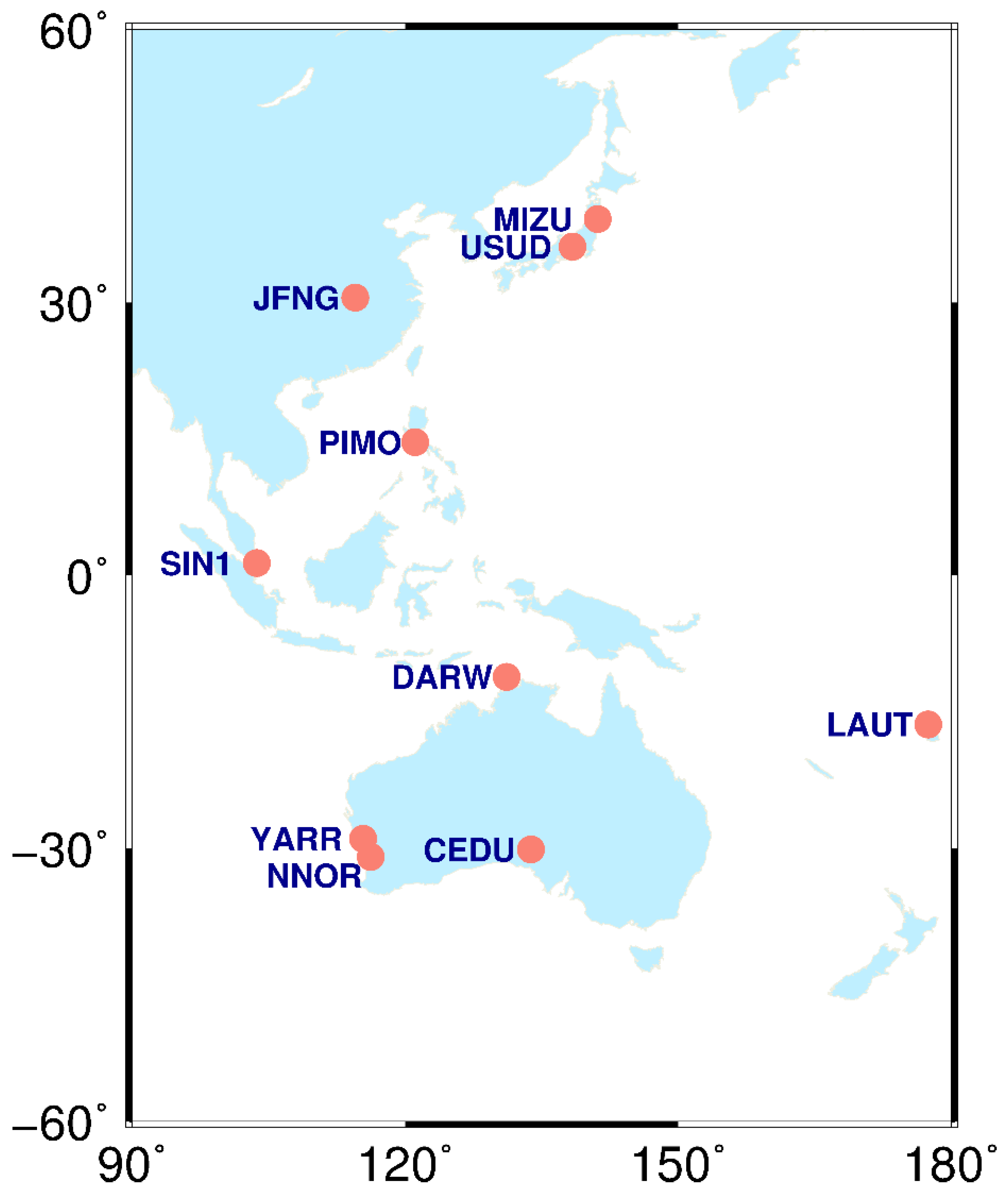
The observation data of 10 stations (CEDU, DARW, JFNG, MIZU, NNOR, PIMO, SIN1, USUD, YARR) from the MGEX network located in the Asia-Pacific region from day of year (DOY) 283 to 289 in 2021 are applied. The distribution of these stations is shown in
Figure 1, and the latitude, longitude, receiver type, and antenna type of each station are listed in
Table 2. These 10 stations are evenly distributed in different latitudes and longitudes around the Asia-Pacific region, and all frequencies of GPS, BDS-2, BDS-3, GLONASS, Galileo, and QZSS satellites can be received by these stations, which can better reflect the observation data quality and positioning performance of multi-GNSS in the Asia-Pacific region. The observation data quality was studied in the Asia-Pacific region in terms of two indicators: C/N0 and pseudorange multipath, in which the C/N0 can reflect the ability of the signal strength from satellite to receiver, whereas the impact of the satellite signal due to ground interference on the receiver can be reflected in pseudorange multipath. The C/N0 and pseudorange multipath are important indicators in the observation data quality assessment, and their performance directly affects the performance of PNT services.
2.1. Carrier-to-Noise-Density Ratio
The C/N0 is the ratio of the carrier signal to noise, which can reflect the signal strength of GNSS observations on the receiver side. The larger the C/N0, the smaller the noise and the better the signal quality, and vice versa. The C/N0 of every satellite at each epoch can be directly obtained from the observation files. In this study, the relationship between the C/N0 and the elevation of the GNSS satellite signal is investigated and analyzed. When obtaining the C/N0, the sampling interval of the observation data is set as 30 s and the elevation mask is set to 0°. All C/N0 values within 5 degrees of elevation angle are grouped into one group, and then the average of C/N0 within each group of elevation angle is calculated [
21].
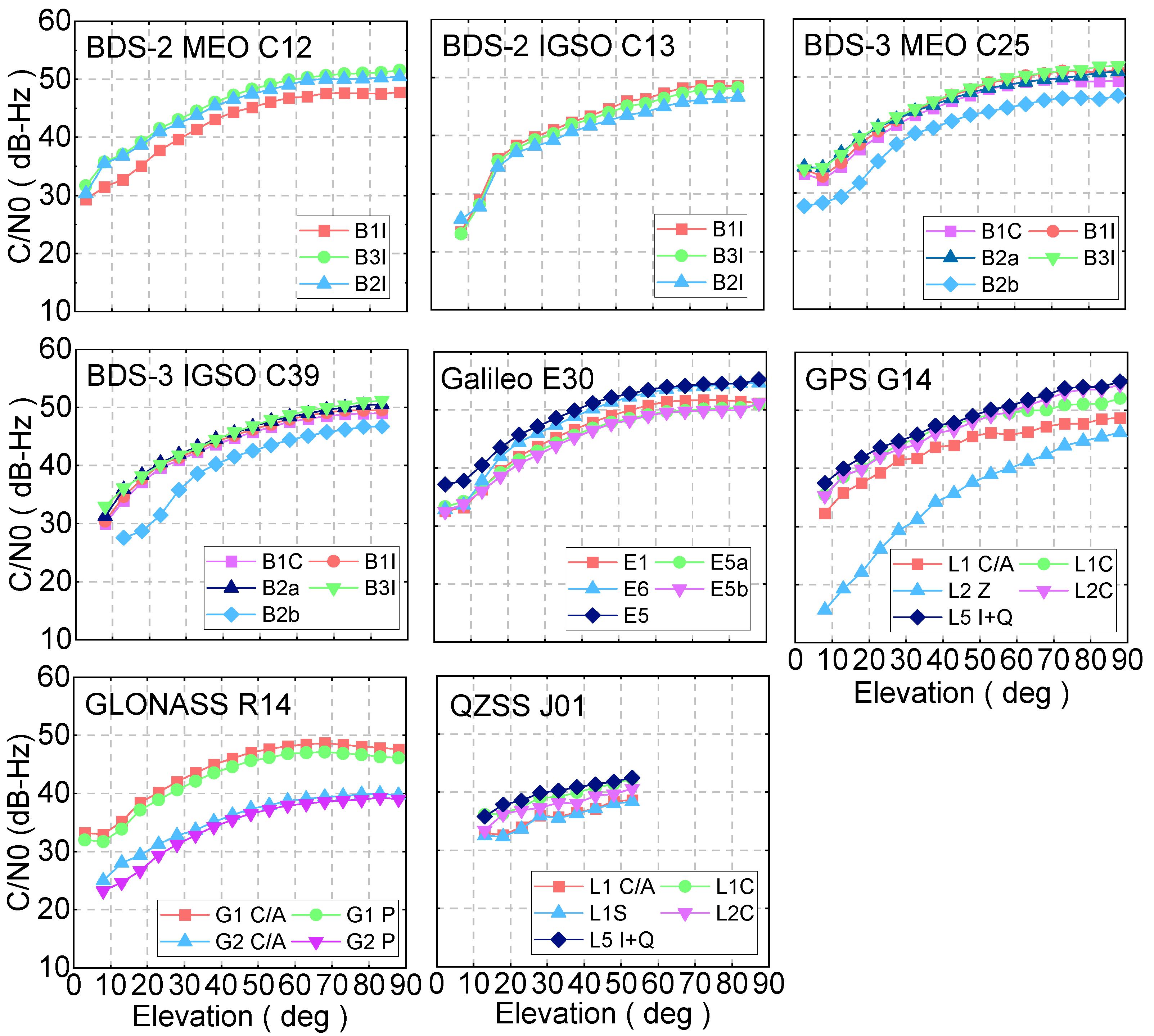
The average C/N0 corresponding to elevation for BDS-2 MEO, BDS-2 IGSO, BDS-3 MEO, BDS-3 IGSO, Galileo, GPS, GLONASS, and QZSS satellite is calculated, and one typical satellite of each system was shown in
Figure 2, respectively. For the BDS-2 MEO satellite, the C/N0 of the B1I signal for the C12 satellite is slightly worse than that of B3I and B2I; although the signal strength is different, the C/N0 variation of these three frequencies shows the same variation trend. The C/N0 of B1I, B3I, and B2I signals have comparable performance for all elevation angles in terms of BDS-2 IGSO satellites. If these three signals can be selected for users, the difference in C/N0 does not need to be considered. In terms of the BDS-3 satellites, the C/N0 of the B2b signal is worse than that of B1C, B1I, B2a, and B3I whether for the IGSO or MEO satellites. It can be clearly seen that the C/N0 of BDS-3 satellites is better than that of BDS-2, which may be that the Binary Offset carrier (BOC) and Quadrature Multiplexed Composite Binary Offset Carrier (QMBOC) signal design is applied to BDS-3 satellites. For MEO satellites, the C/N0 of BDS-3 is higher than that of BDS-2 with 1–2 dB-Hz; while these values are 2–3 dB-Hz for IGSO satellites. The C/N0 of the Galileo E5 signal shows the best performance among the five Galileo frequency bands. The C/N0 of the L2 Z-tracking signal channel for GPS satellites is poorer than that of other frequencies. Moreover, the C/N0 for the L1 C/A signal is slightly poorer than that of L1C, L2C, and L5 I + Q. The C/N0 of GLONASS G1 frequency is better than that of G2, which can be attributed to the lower frequency value of the G2 signal. The C/N0 values for five QZSS frequencies present a similar performance at the different elevation angles. In terms of the five systems: the GPS and Galileo satellites show the best performance, and the C/N0 value can reach 55 dB-Hz when the elevation is nearly 90 degrees, both the BDS and GLONASS are poorer than that of GPS and Galileo, and the QZSS presents the worst performance among five GNSS systems.
2.2. Pseudorange Multipath
The combination of the pseudorange and carrier phase observation is used to calculate pseudorange multipath, which can eliminate the effect of tropospheric and ionospheric delays [
22], and it can be expressed as follows:
where
,
,
are frequency,
denotes the pseudorange multipath;
represents the pseudorange observation;
and
are the carrier phase observation on frequency
and
, respectively.
and
are frequencies;
is the noise.
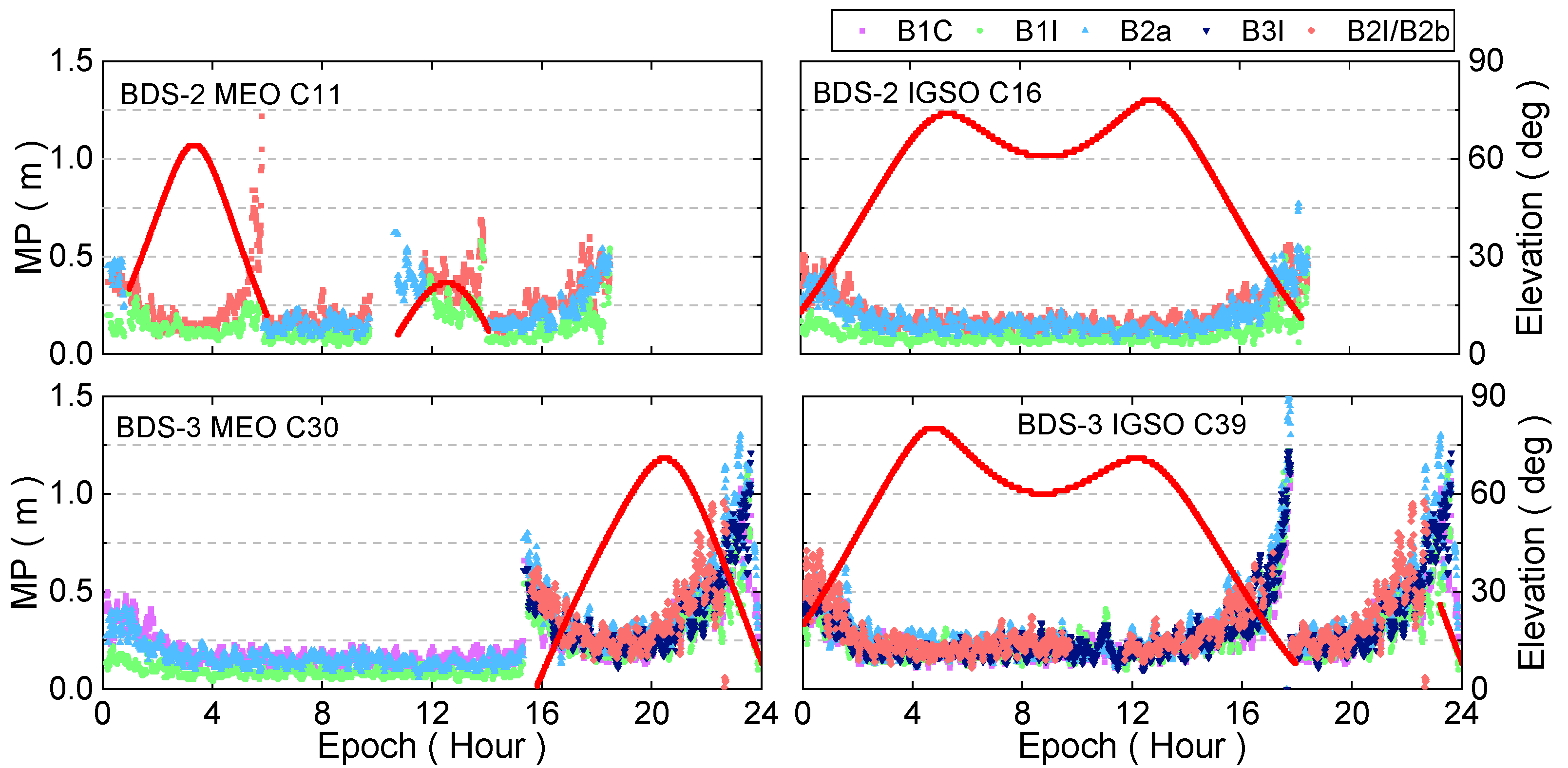
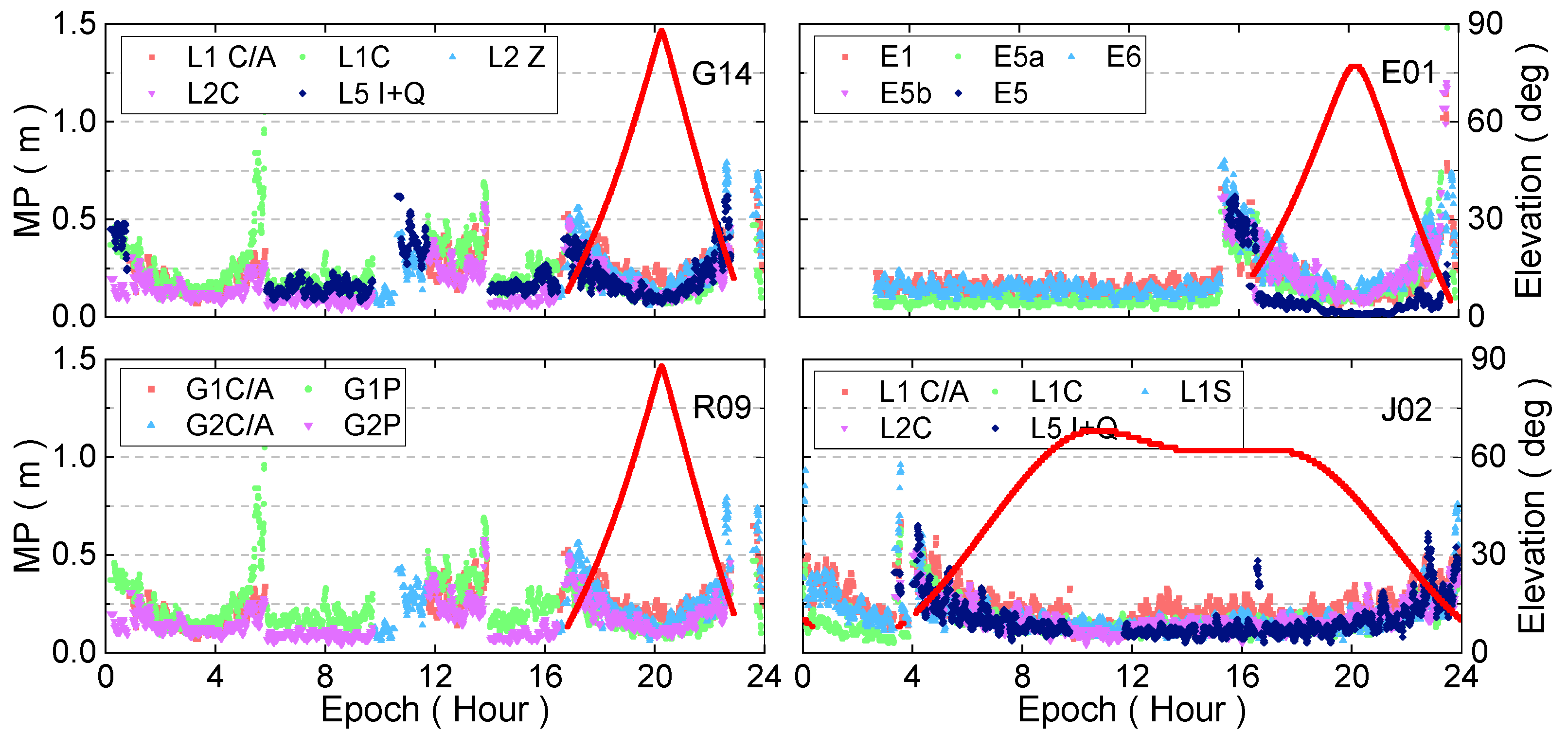
The characteristics of pesudorange multipath for GPS, GLONASS, BDS-2, BDS-3, Galileo, and QZSS satellites are investigated in this study using 10 stations from the Asia-Pacific region. The pesudorange multipath values versus elevation angle for the BDS-2 C11, C16, BDS-3 C30, and C39 on DOY 283 for the JFNG station was shown in
Figure 3. It can be seen that there is an opposite relationship between pseudorange multipath and elevation angle, the larger the pseudorange multipath, the smaller the elevation angle, and vice versa. The pseudorange multipath is significantly large when the elevation is extremely small in some cases, which may be caused by the observation noise. For the BDS-2 satellites, the pseudorange multipath of the B3I signal is better than those of B1I and B2I. In terms of the BDS-3 satellites, the B1I frequency band of the MEO satellite presents the best performance, its pseudorange multipath is the smallest. Overall, the BDS-3 pseudorange multipath is around 0.28 m, while it is about 0.3 m for the BDS-2 satellites. The time series of pseudorange multipath with respect to elevation on the JFNG station for GPS, GLONASS, Galileo, and QZSS is shown in
Figure 4. Similar to BDS-2 and BDS-3 satellites, the pseudorange multipath shows an opposite relationship with the elevation angle. Among them, the pseudorange multipath value of Galileo is the smallest, and it is around 0.2 m, the GPS and QZSS systems show comparable performance, and its value is around 0.3 m, while the value is about 0.4 m for GLONASS satellites. Since the pseudorange multipath effect is an important error source at the receiver side, it has a negative impact on GNSS precise data processing. In GNSS precise data processing, the following measures can be adopted to eliminate or weaken the effect of it: Firstly, reducing or eliminating the weight of observation with low elevation; secondly, modeling the pseudorange multipath errors.
4. PPP Accuracy Evaluation
To investigate the positioning performance of multi-GNSS in the Asia-Pacific region, 10 MGEX stations were selected to conduct static and kinematic PPP experiments. For the data processing strategies, the sampling interval of observation data is 30 s, and the period is from DOY 283 to 289 in 2021. At present, several MGEX analysis centers can provide precise satellite orbit and clock offset products for the five systems, and the consistency between WUM orbit and clock offset products and other MGEX analysis centers is about 3–10 cm and 0.1–0.3 ns, respectively, showing better consistency with the products from other analysis centers. The positioning performance in the Asia-Pacific region can be reflected using the WUM orbit and clock offset products [
28,
29]. Therefore, the multi-GNSS final satellite orbit, clock offset, and earth rotation parameter (ERP) products generated from Wuhan University are applied in this study [
30]. The satellite antenna phase center variation (PCV) and phase center deviation (PCO) values are used from igs14.atx [
31]. The dual-frequency ionosphere-free is employed to eliminate the effect of the first-order ionosphere and the higher-order ionosphere is ignored [
32]. The zenith hydrostatic delay of the troposphere is corrected using the Saastamoinen model [
33], while the zenith wet delay is estimated as the parameter. The carrier phase ambiguities are estimated as float solutions [
34]. The station coordinates of the static PPP are estimated as a constant, while it is estimated as white noise in the kinematic model. The receiver clock offset is estimated as white noise. In addition, the relativistic effects, satellite antenna phase wind-up, and station tides are weakened or eliminated using existing models [
35,
36,
37]. To compare the positioning performance differences between single-system and multi-GNSS combinations in the Asia-Pacific region, six mode combinations in the static and kinematic PPP experiments were conducted, which is: GPS(G), GPS/QZSS combination (GJ), BDS (C), BDS/QZSS combination (CJ), GLONASS (R), and Galileo (E), respectively. The convergence time and positioning accuracy are used to evaluate the positioning performance. The convergence time is that the current epoch with 20 consecutive epochs is better than 10 cm, and the positioning accuracy is the RMS of the positioning error after convergence [
38]. It is noted that the positioning error is the positioning difference between the PPP solutions and IGS weekly solution [
39].
4.1. Static PPP Performance
The mean convergence time for static PPP of six combinations for each station in the east, north, and up directions is presented in
Figure 9, and the mean convergence time of each combination is listed in
Table 6. It can be seen from
Figure 9 and
Table 6 that the convergence time of GPS is the shortest among six combinations, which are 6.01 min, 5.53 min, and 16.52 min for the east, north, and up directions, respectively. For the east and north directions, the convergence time of Galileo is faster than that of BDS, and the GLONASS show the longest convergence time, which may be that all selected stations are located in the region with low latitudes, and better positioning performance can be achieved at high latitudes than low latitudes for GLONASS [
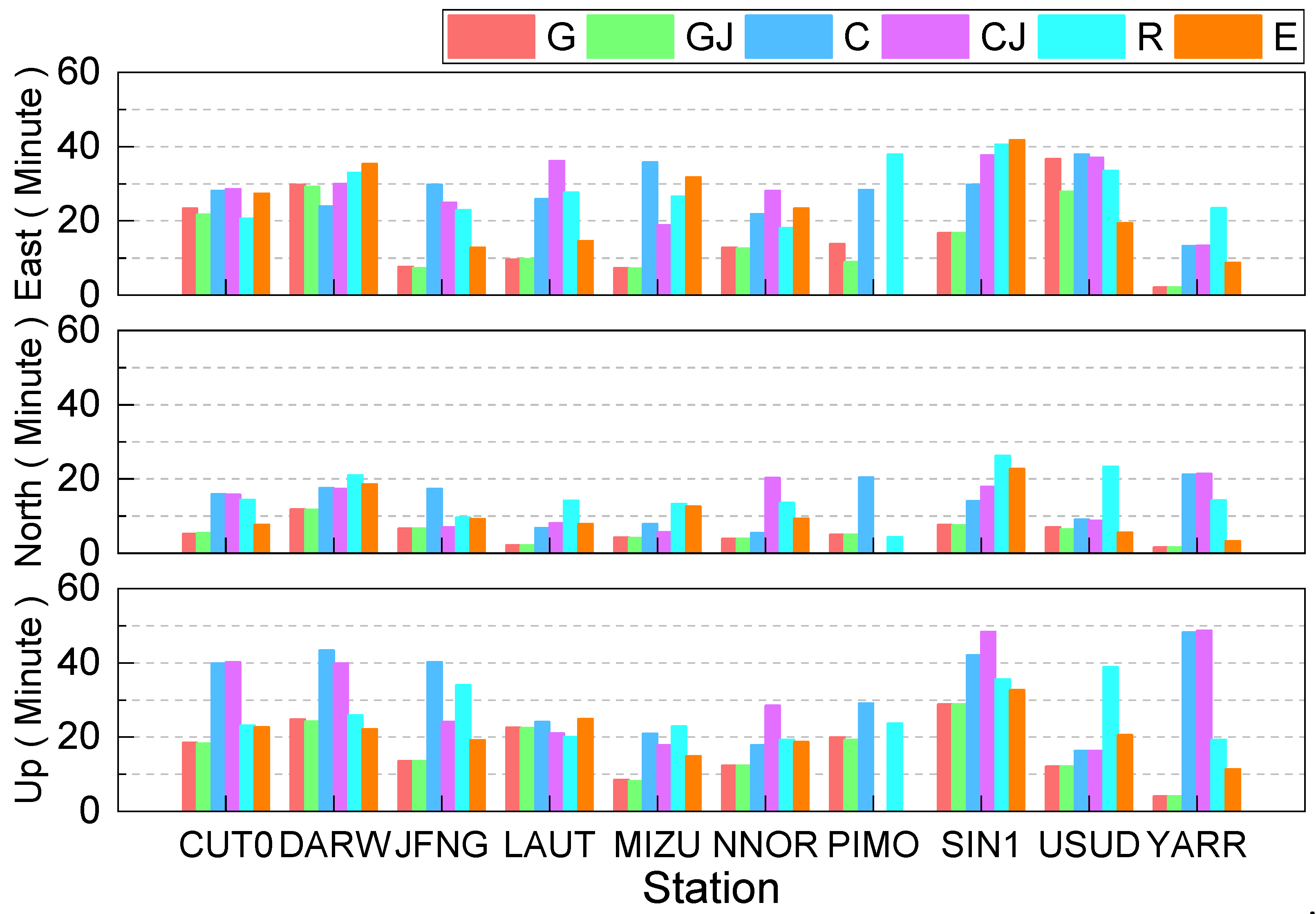
38]. In terms of up component, the convergence time of Galileo is shorter than that of GLONASS, while the BDS presents the poorest convergence performance in the up component among the six combinations, and its convergence time is 32.17 min. Furthermore, compared to the GPS-only solution, the convergence time of the GPS/QZSS combination can be shorted, and the improvements are 10.37%, 0.90%, and 1.15% in the east, north, and up directions, respectively. While compared to the BDS-only solution, the BDS/QZSS solutions only short the convergence time in the up direction, the improvement is 1.65%. The reason may be that the number of BDS satellites in Asia-Pacific is larger than 20, when conducting PPP, by adding QZSS satellites, the improvements in convergence time for static PPP are limited.
The mean positioning accuracy for static PPP of six combinations for each station in the east, north, and up directions are presented in
Figure 10, and the mean positioning accuracy of each combination is listed in
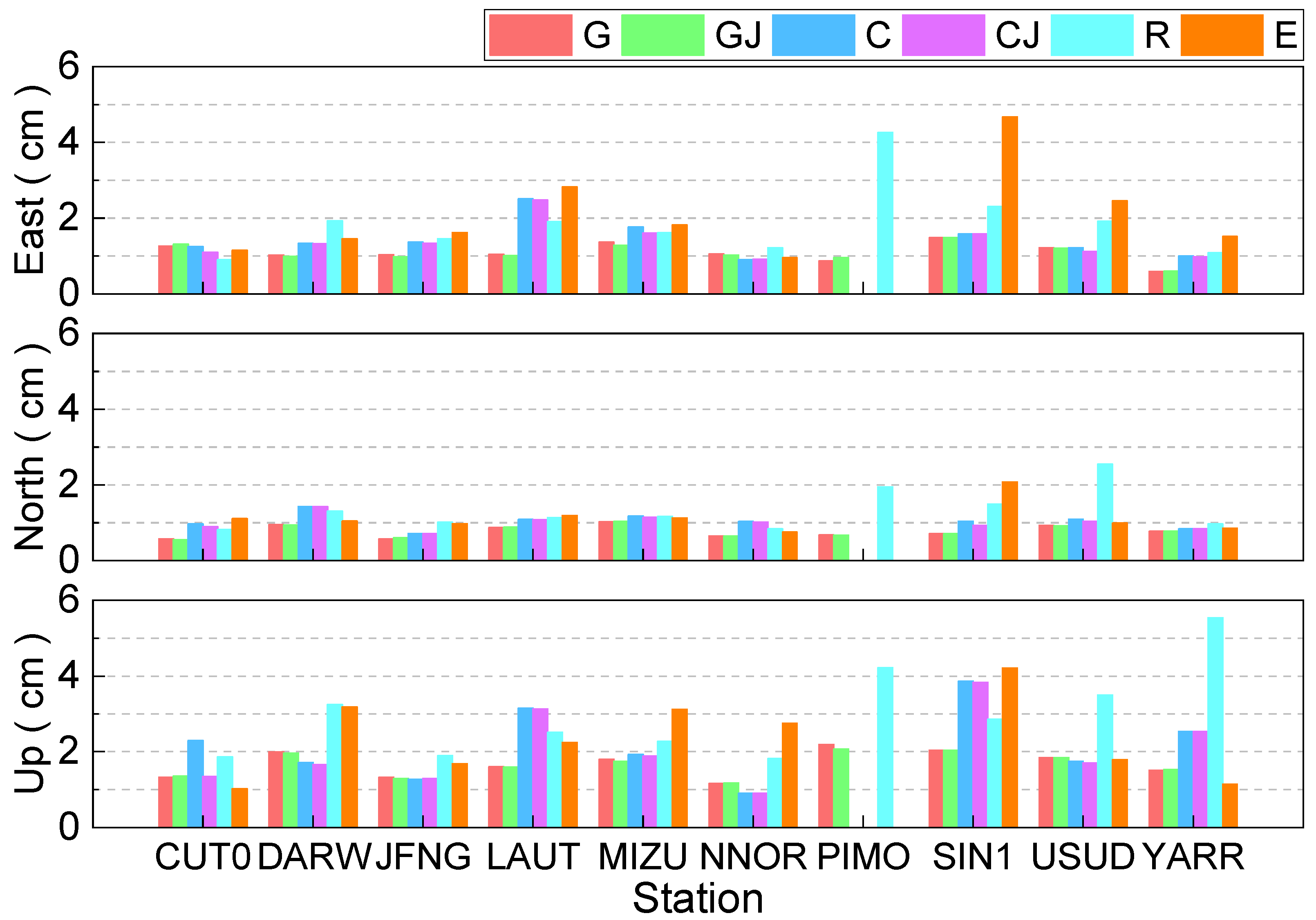
Table 6. It can be clearly seen that the positioning accuracy is better than 3 cm in the east direction except for PIMO and SIN1 stations. Apart from the USUD station, the positioning accuracy of other stations is better than 2 cm in the north component. The positioning accuracy is outperformed 5 cm in the up direction except for YARR station. The positioning accuracy of GPS is the best, and it is 1.09 cm, 0.78 cm, and 1.68 cm in east, north, and up directions, respectively. For three components, the positioning accuracy using BDS is better than that of GLONASS, while Galileo shows the worst performance. Compared to the GPS-only solution, the positioning accuracy of GPS/QZSS solutions can be improved, and the improvement is 0.92%, 1.28%, and 1.19% in the east, north, and up directions, respectively. The few improvements may be caused by the limited number of QZSS satellites. The improvement of the BDS/QZSS solution in terms of positioning accuracy is 1.43%, 1.94%, and 1.92% in east, north, and up directions compared to the single BDS-only solution. Totally, the positioning accuracy of six combinations is better than 3 cm, 2 cm, and 4 cm in the east, north, and up directions, respectively.
4.2. Kinematic PPP Performance
The mean convergence time for kinematic PPP of six combinations for each station in the east, north, and up directions is presented in
Figure 11, and the mean convergence time of each combination is listed in
Table 7. It can be seen that the convergence time of the Galileo solution is the shortest in the east direction, it is 23.82 min, while the shortest convergence time is the GPS-only solution in the north and up directions, with convergence times being 8.49 min and 24.4 min, respectively. For the east direction, the convergence time of the GPS-only solution is faster than that of the GLONASS-only solution, and the BDS-only solution is the longest, nearly one hour is still needed to obtain the centimeter-level position accuracy in kinematic PPP mode, whereas it is about 20 min for the GPS/QZSS solutions. Compared to the GPS-only and BDS-only solutions, the improvement of convergence time for the GPS/QZSS and BDS/QZSS solutions is 24.82%, 7.66%, 10.90%, and 11.06%, 19.94%, and 6.66% in the east, north, and up components, respectively. Compared to the static PPP, the improvement rate of convergence time for the GPS/QZSS and BDS/QZSS solutions is larger, which may be that the increased number of satellites and better geometry distribution of satellites are beneficial to the convergence of kinematic PPP.
The kinematic PPP mean positioning accuracy of six combinations for each station in the east, north, and up directions are presented in
Figure 12, and the mean positioning accuracy of each combination is listed in
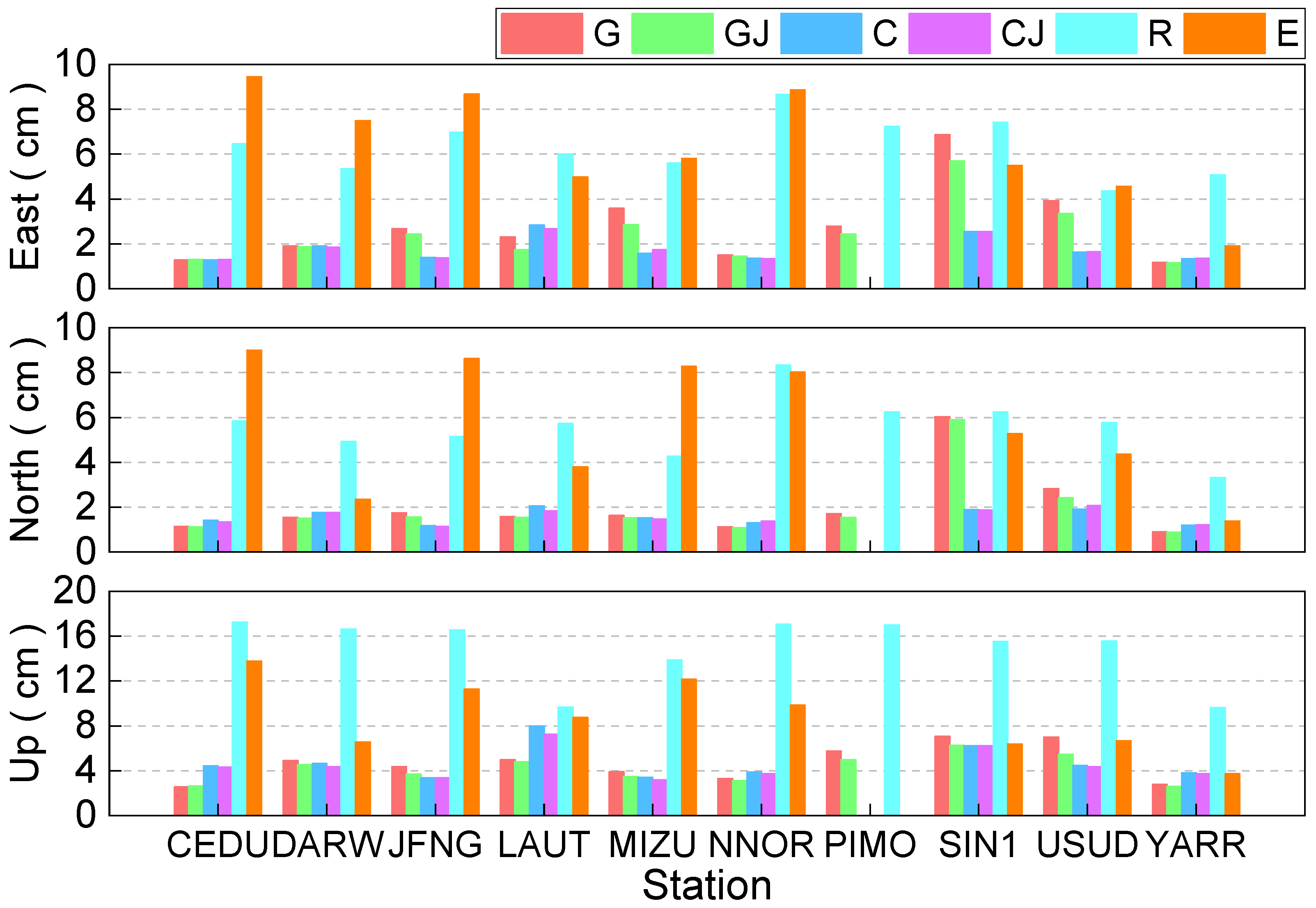
Table 7. One can see that the GPS-only, GPS/QZSS, BDS-only, and BDS/QZSS solutions show similar positioning accuracy in three directions except for the LAUT and MIZU station, which is better than 3 cm in the three directions. The positioning performance of GLONASS and Galileo in the Asia-Pacific region is relatively poorer. The positioning accuracy of BDS presents the best performance in the east and north component, and the positioning accuracy is 1.77 cm and 1.59 cm, respectively. This is due to the launch of BDS-3 satellites, the number of BDS satellites is more than other satellite systems in the Asia-Pacific region. The positioning accuracy in the up direction of GPS shows the best performance, and it is 4.65 cm. For the east and north directions, the positioning accuracy of GPS is better than that of Galileo, whereas the GLONASS is the worst. In terms of the up direction, the positioning accuracy of BDS is better than that of Galileo, while the GLONASS is still the worst. Moreover, compared to the GPS-only solution and BDS-only solutions, the positioning accuracy of the GPS/QZSS and BDS/QZSS solutions can be improved from 2.80 cm, 2.03 cm and 4.65 cm to 2.43 cm, 1.91 cm and 4.15 cm, with the improvement being 13.21%, 5.91%, and 10.75%, from 1.77 cm, 1.59 cm, and 4.69 cm to 1.76 cm, 1.57 cm, and 4.50 cm for the east, north, and up directions, with the improvement being 0.56%, 1.26%, and 4.05%, respectively. Except for the GLONASS-only and Galileo-only solutions, the positioning accuracy of 3 cm, 3 cm, and 5 cm in the east, north, and up components for kinematic PPP can be achieved.
The consistency of performance improvement among systems based on multi-GNSS data quality, broadcast ephemeris accuracy, and precision positioning performance is analyzed. It can be found that the observation data quality of GPS is improved by 28.11%, and the improvement for SISRE, static PPP, and kinematic PPP is 75%, 44.31%, and 69.24% compared to GLONASS, respectively. Compared to GLONASS, the improvement of data quality, SISRE, static PPP, and kinematic PPP of Galileo is improved by 32.71%, 75%, 5.52%, and 28.37%, respectively. The improvement of BDS-3 is 33% and 32.78% compared to BDS-2 in terms of observation data quality and SISRE, respectively. These results show that there is a consistency between data quality, SISRE, and PPP.
5. Conclusions
This paper focused on the performance of multi-GNSS in the Asia-Pacific region. One-week period observation data from 10 MGEX stations, precise satellite orbit and clock offset products, and broadcast ephemeris were used to investigate the performance of C/N0, pseudorange multipath, broadcast ephemeris clock offset accuracy, broadcast ephemeris orbit accuracy, SISRE, static PPP, and kinematic PPP in the Asia-Pacific region, and the conclusions are as follows:
(1) The C/N0 and pseudorange multipath among GPS, BDS-2, BDS-3, QZSS, GLONASS, and Galileo were investigated and compared; the C/N0 of GPS and Galileo shows the best performance, and the C/N0 for BDS and GLONASS are worse, and the C/N0 of QZSS is the poorest. The pseudorange multipath error of Galileo has the smallest, about 0.2 m, GPS and QZSS are comparable at about 0.3 m, and GLONASS is around 0.4 m.
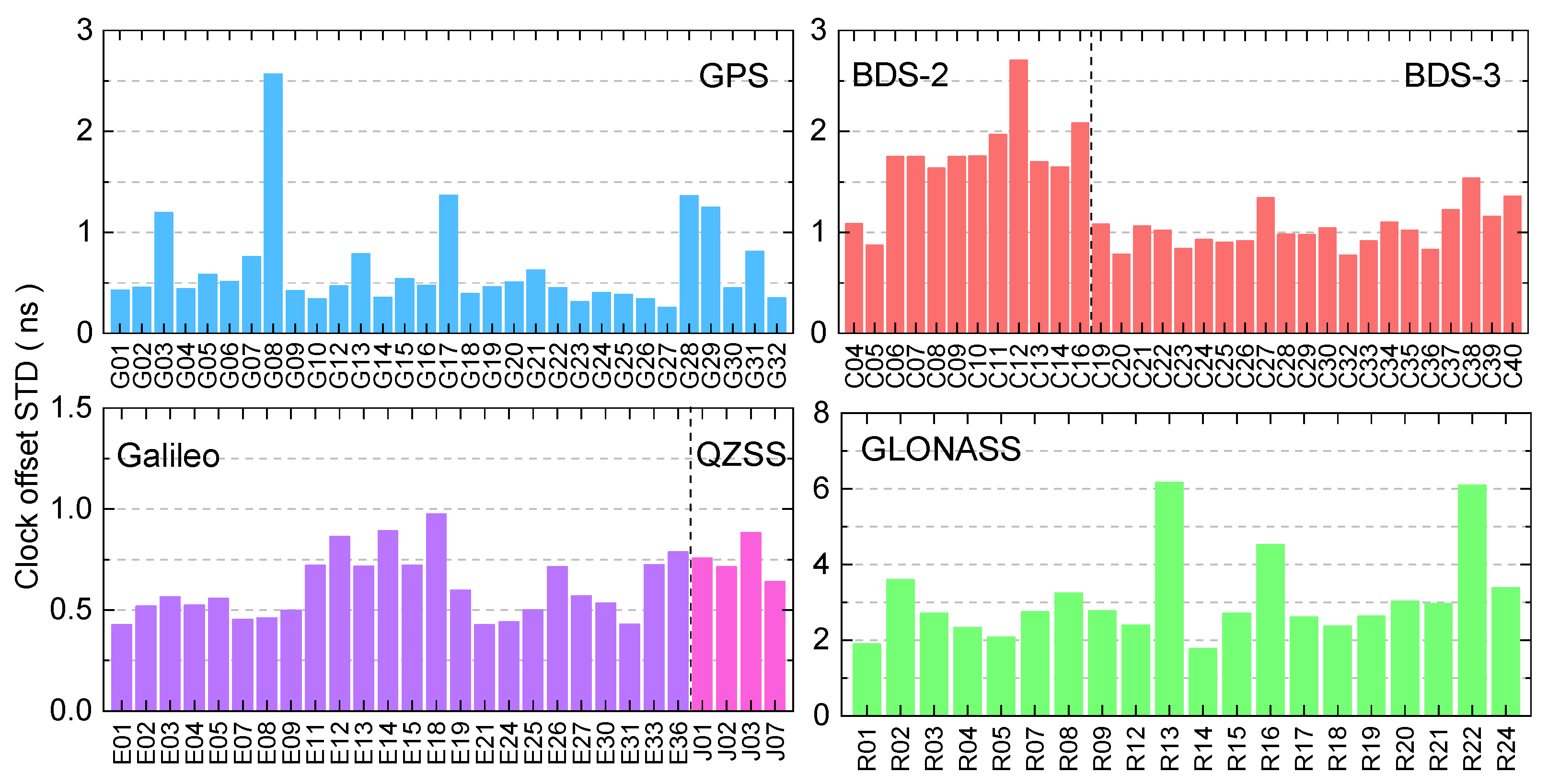
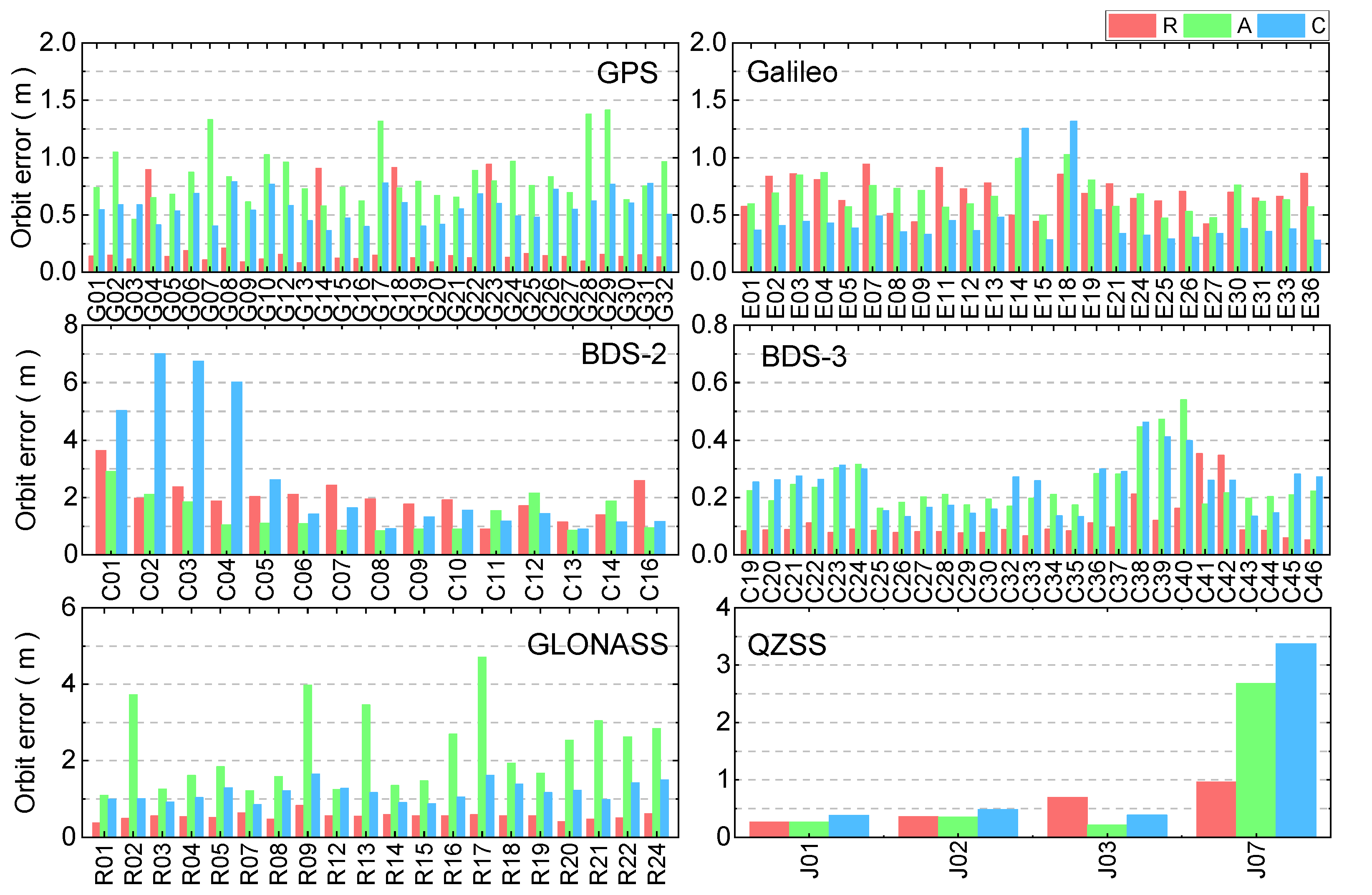
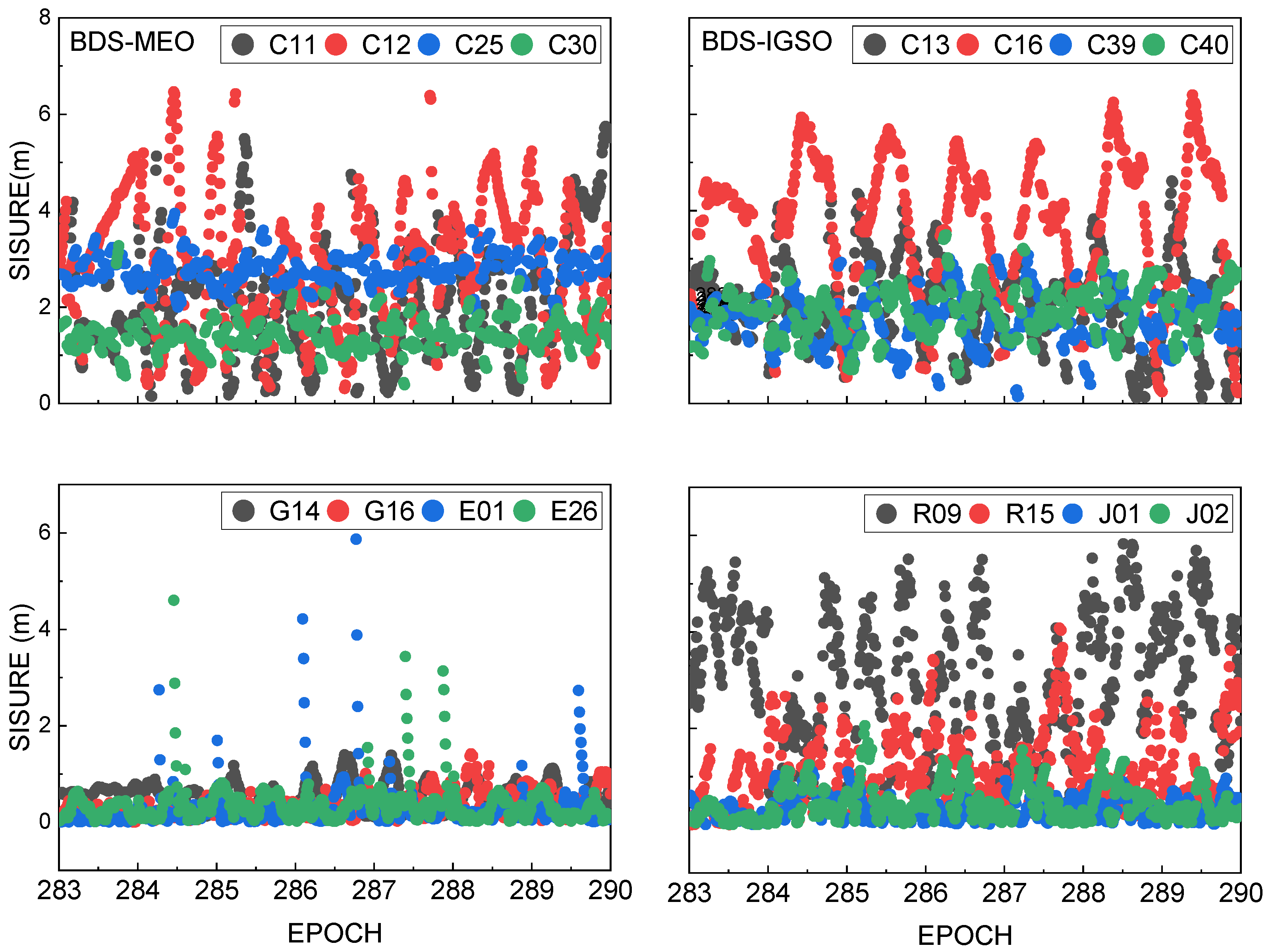
(2) The broadcast ephemeris orbit and broadcast ephemeris clock offset of GPS, BDS-2, BDS-3, QZSS, GLONASS, and Galileo were analyzed, and the results show that the broadcast ephemeris clock offset accuracy of Galileo is the best, followed by GPS, QZSS, BDS-3, BDS-2, and GLONASS, respectively. For the broadcast ephemeris orbit, the accuracy of BDS-3 is the best, followed by GPS, Galileo, QZSS, GLONASS, and BDS-2, respectively. The SISRE of BDS-3 is better than BDS-2 for both MEO and IGSO satellites, and by comparing the observation data quality and SISRE, it can be found that when the observation data quality is better, the broadcast ephemeris SISRE is also better, and vice versa, indicating that the magnitude of SISRE has a certain correlation with the observation data quality results.
(3) The static PPP and kinematic PPP performance were analyzed in terms of GPS, GPS/QZSS combination, BDS, BDS/QZSS combination, GLONASS, and Galileo. For static PPP, the positioning accuracy of GPS and GLONASS present the best and worst performance, respectively. In terms of kinematic PPP, the positioning accuracy in the east and north direction of GPS is better than that of Galileo. For up direction, the positioning accuracy of BDS is better than that of Galileo, the GLONASS shows the worst positioning performance in the east, north, and up component. Compared to the GPS-only and BDS-only solutions, the positioning accuracy of GPS/QZSS and BDS/QZSS solutions is improved, and the improvement rate of kinematic is larger than static PPP.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}