1. Introduction and State of the Art
Image-based and laser scanning are the mainly employed techniques for the 3D reconstruction of extensive areas. The first one, in particular, has been growing incredibly in the last few years, thanks to the possibility of being combined with the use of Unmanned Aerial Vehicles (UAVs), or drones. These can be equipped with a professional camera and can survey large and open spaces in a short time, with a low effort and, especially, a minimal cost. Laser scanning, on the other side, requires a higher effort to be used, so it is preferred in situations where a UAV cannot operate, such as in the 3D reconstruction of a large enclosed environment.
One of the current significant limitations in using these technologies is managing the extensive data set resulting from the acquisitions. Nowadays, large-scale 3D scanners can reach a few centimeters and even millimeters of resolution. Millions of points can characterize the resulting 3D point cloud when capturing large area environments. Such a large point cloud is quite hard to process with the current technologies [
1], in particular for three different aspects, which are:
This last point, in particular, is becoming crucial in the last few years because, the characteristics of 3D scanners being complementary, the research community has advocated the integration of point clouds coming from different acquisition modalities [
2]. This integration, being in most cases the point clouds defined in different coordinate systems, requires a well-known registration procedure that allows for aligning multiple geometric models to a unique reference frame. One of the most used methodologies for point cloud alignment is based on the use of markers. At least three markers are appropriately positioned on the area to be scanned. The point clouds are aligned by imposing the overlap of the recognized markers. The main limit of this methodology is the precision of the result, which also depends on the resolution of the digital images used to acquire the markers. Furthermore, the markers have to be positioned in an area to be detected in both acquisitions. This is not possible in the case of acquisitions performed a long time apart. In such cases, the use of natural markers is preferred, which, on the other side, is more difficult to detect accurately.
Most of the other existing procedures for point cloud alignment employ a coarse-to-fine alignment [
3]. The coarse registration is addressed to establish a rough alignment between the point clouds. This step is fundamental for the methodologies in use for the fine registration, which are very sensitive to the initial alignment in terms of computational cost and final result. The coarse registration can adopt several strategies: Aiger et al. [
4], for example, introduced the
Four-points congruent set, a method allowing for extracting a set of four co-planar points whose intersectional diagonal ratios are invariant. This property is used to verify the matching between two point clouds and evaluate the alignment’s rigid transformation (rotation and translation). The weakness of this method is the high computational cost required to verify the matches between point sets.
Other methods treat the coarse alignment by using a
probabilistic approach, searching for one-to-many correspondences between density functions. Jian et al. [
5] modeled the point clouds through the Gaussian mixture models. Golyanik et al. and Zang et al. [
6,
7] proposed an improved and refined probabilistic registration framework. However, the limit of these methodologies is the incapability to work with large point clouds because registration results strictly depend on the sampling point clouds.
Finally, a last class of methodologies is based on
deep learning techniques. Their significant advantage consists in the capability to recognize automatically, with good performance, features in the point cloud, reducing the subjectivity introduced by the operators when they perform these operations manually. The identified features are then used to establish the transformation matrix necessary for the alignment of point clouds. Some of the most interesting and recent works in this area have been presented by Qi et al. [
8], Deng et al. [
9,
10], Yang et al. [
11], and Wang et al. [
12]. Their methods allow the direct alignment of unordered point sets. However, their reliability is limited only to small-scale indoor environments.
The previously presented methodologies do not allow for obtaining, so far, a satisfying alignment in metrological terms. Therefore, they are typically applied only as a first step of a more complex registration procedure that foresees, in the second part, the use of Iterative Closest Point (ICP) or Normal Distribution Transform (NDT), with their respective variants.
The ICP is a diffused method for fine registration of point clouds: it is quite simple to implement and the results are satisfying, especially when a good initial alignment is provided between the point clouds. ICP [
13] performsoptimal registration by conversely resolving the nearest point-to-point correspondence and the optimal rigid transformation until convergence [
14]. ICP searches for one-to-one correspondences between the points; this generates difficulties when the point clouds are characterized by heterogeneous densities, a typical drawback of 3D scanner technologies. ICP is also very sensitive to outliers, noise, and occlusions and misbehaves when the point clouds to be aligned have been acquired in different conditions (presence of cars, fauna, different light or weather conditions). Furthermore, this method is onerously computational since hundreds of thousands of points must be processed in a mathematical optimization process. Consequently, several variants of the classical ICP method have been proposed during these years. Sharp et al. [
15], for example, suggested the use of invariant features combined with the idea of the geometric distance to minimize the effects of noise. Bae et al. [
16] introduced a reviewed ICP, which uses curvature and normal vectors to identify the correspondences. Bouaziz et al. [
17] presented a technique that treats the ICP as a sparse optimization problem whose solution minimizes the effects of outliers. In addition to the quality of the point cloud alignment, the computational efficiency of the method is another critical aspect. Uhlenbrock et al. [
18] proposed a 2D array based k-d tree to speed up the iterative process. Pavlov et al. [
19] introduced the Anderson acceleration technique in ICP, helping to reduce the number of iterations required for the method to converge. Nevertheless, the sensitivity to noise and outliers and the low efficiency of the method remain an open topic for the ICP.
NTD [
20,
21] is another method employed for the fine alignment. Its working principle is similar to the coarse alignment’s previously mentioned probabilistic approach. The point cloud is represented through a Gaussian distribution; each distribution is characterized by a specific Probability Density Function (PDF). Assigned two-point clouds to align, the NTD determines, through a nonlinear optimization problem, the transformation which minimizes the dissimilarities between the two PDFs. As opposed to the ICP, the NTD can also operate with low-density point clouds. On the other side, this method is conceptually more difficult to implement; the definition of PDFs requires a voxelization of the point cloud space, and the results of the nonlinear optimization are strictly dependent on the first alignment tentative.
The point clouds registration performed by using geometric features is a promising strategy to reduce the computational complexity of the ICP method, which can achieve high-quality results. This approach for the point cloud alignment is based on the overlap of properly selected geometric features recognized in the common area of each point cloud. This approach is, in general, much more efficient than the ICP since the alignment process is performed by using a limited amount of data, those associated with few geometric entities, generally planes. Furthermore, it performs high-quality results not so far from those obtained using ICP. Stamos et al. [
22] presented a method where the alignment of point clouds is based on the intersection lines of the geometric planes associated with the vertical facets of buildings. A similar methodology was proposed by Yang et al. [
23]. Some methods look interesting since they improve the efficiency of the feature alignment process. Dold et al. [
24] introduced a technology that identifies the 3D planar patches of the mesh and combines them by using a constrained search technique so that the matching combinations are reduced. Xu et al. [
25] proposed an automatic strategy for aligning planar patches based on the voxelization of the point cloud. In each voxel, an implicit plane representation is adopted to fit the surface of points. An eigenvalue decomposition evaluates the quality of the approximating plane with the surface.
Wu and Fan in [
26] present an approach for registering airborne LiDAR point clouds based on matching corresponding linear plane features. First, the point clouds of the building roofs are extracted from the two LiDAR datasets using the method proposed in [
27]. By an iterative process, the points used to approximate the roofs are those for which the residual error compared to the approximating plane is less than a threshold value. Then, the normal vectors are calculated for every simple roof facet of the corresponding buildings. The vectors of the roof facets are used to establish an observation equation system to estimate the transformation between the two datasets; the correspondence between roofs is manually detected. The least-squares method is used to solve the observation system with redundant feature-pairs. The registration is performed in two steps: first, the rotation matrix calculation and then the 3D translation vector computation. The results show that the method does not consider the size of the roofs in the optimization but only their number. This leads to incorrect registration in the case of a non-uniform distribution of roofs.
Rabbani et al. [
28] illustrated a methodology that uses other kinds of features, such as cylinders, spheres, and planes that are extracted directly from the point cloud.
Registration performed using geometric features is fascinating because these, especially those extended concerning the point cloud’s dimensions, have low sensitivity to noise and outliers. Moreover, when enough geometric primitives are recognized in the point cloud, this one can be set aside for the successive alignment operations because the geometric features are defined by all the geometric attributes necessary for the alignment.
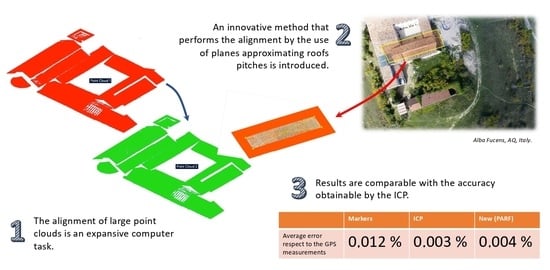
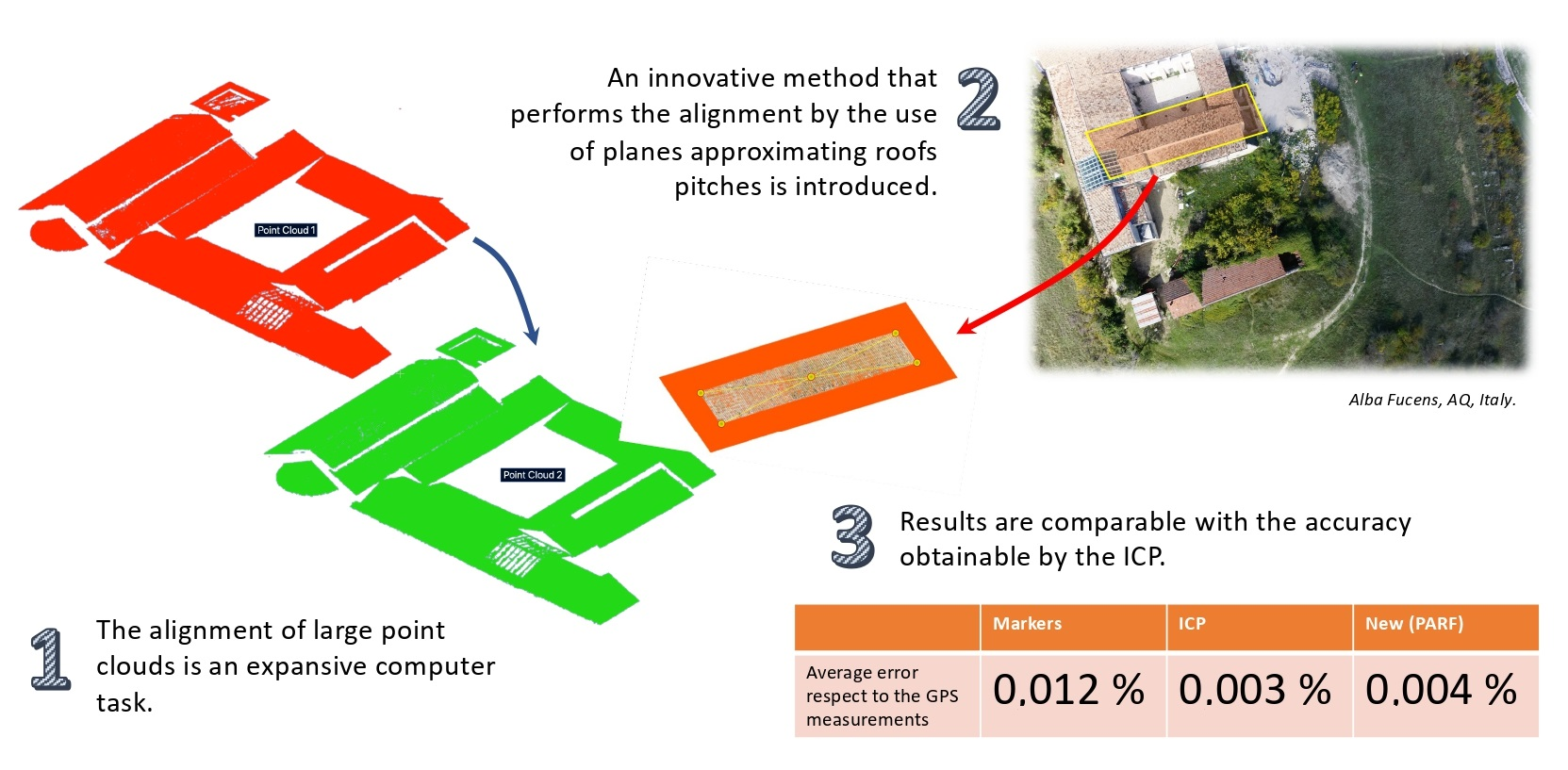
All the described methodologies using geometric features for the alignment have been tested in urban and interior environments since, in these cases, all the acquired objects are defined by planar features. In this paper, the geometric feature-based approach is used to align point clouds acquired in a vast natural environment with few diffused artificial elements such as groups of houses or historical environments. In particular, the possibility of associating planar features with roofs, which represent isolated elements in the environment and are characterized by very irregular surfaces, will be investigated. In addition, a new representation of the ideal flat feature associated with the roofs is proposed considering the roofs’ size in the observation equation system. This allows for an optimization that better considers the spatial distribution of roofs and not simply their spatial position and orientation.
In the first part of the paper, ad-hoc experimentation that has been led to show the validity and the repeatability of approximating roofs by planes will be presented. The second part will discuss an application of the proposed methodology to the test case of Alba Fucens, Italy, where the roofs of some ancient buildings have been used to merge two separate surveys. The alignment results have been compared with the “ground truth” thanks to some Ground Control Points (GCPs), uniformly distributed into the aligned point clouds. The presented methodology results have also been compared with those obtained from an ICP and a marker-based alignment.
3. Experiments and Analysis
The methodology presented here has been tested in Alba Fucens, L’Aquila, Italy. Alba Fucens was an old Roman City founded in 303 B.C., and its ruins represent the broadest archaeological site in the Apennines. The extension of archaeological excavations and elements of interest in this city covers an area of approximately 20 hectares. Therefore, the digital 3D reconstruction of this archaeological site looks suitable for testing the proposed technique.
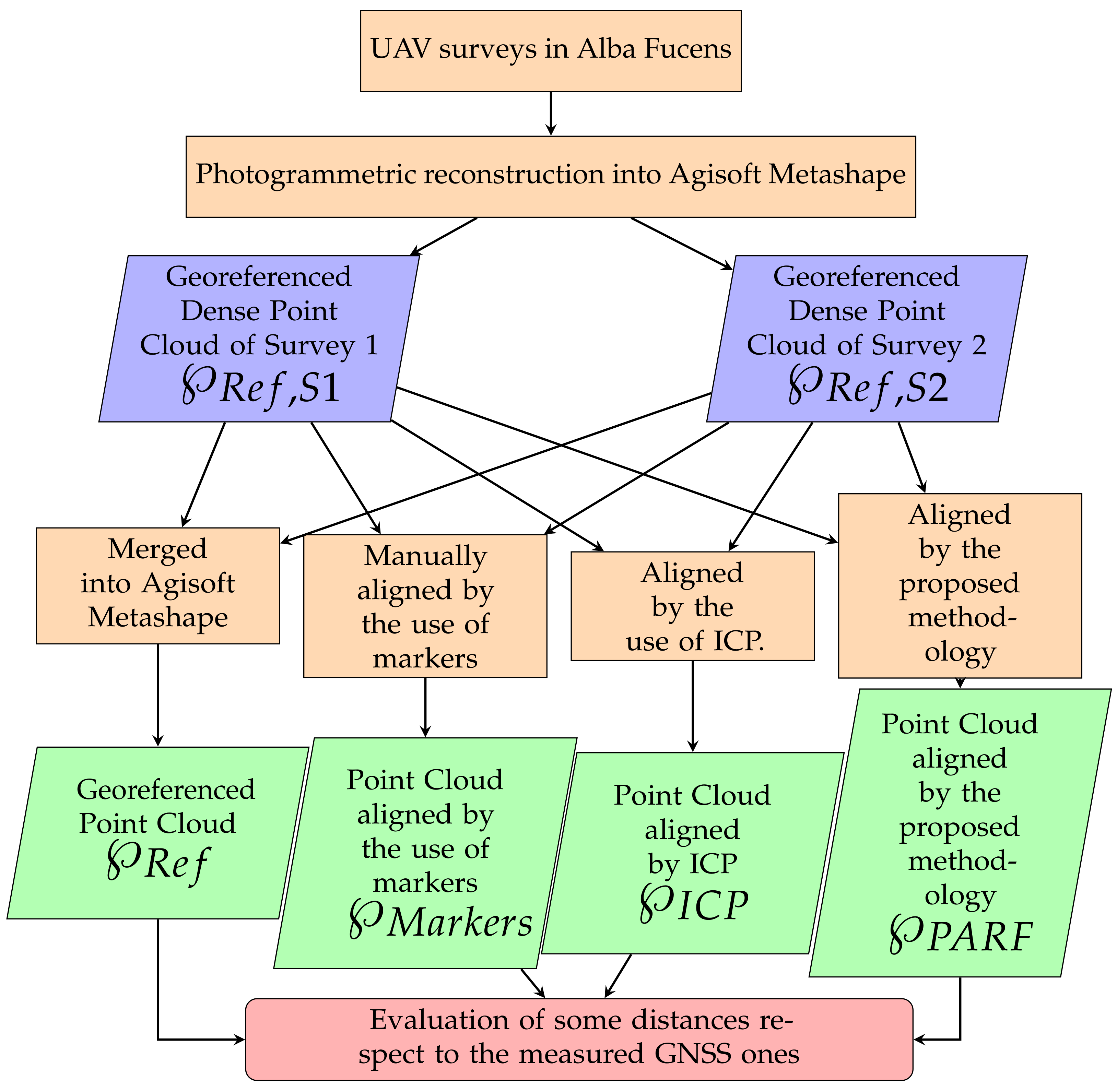
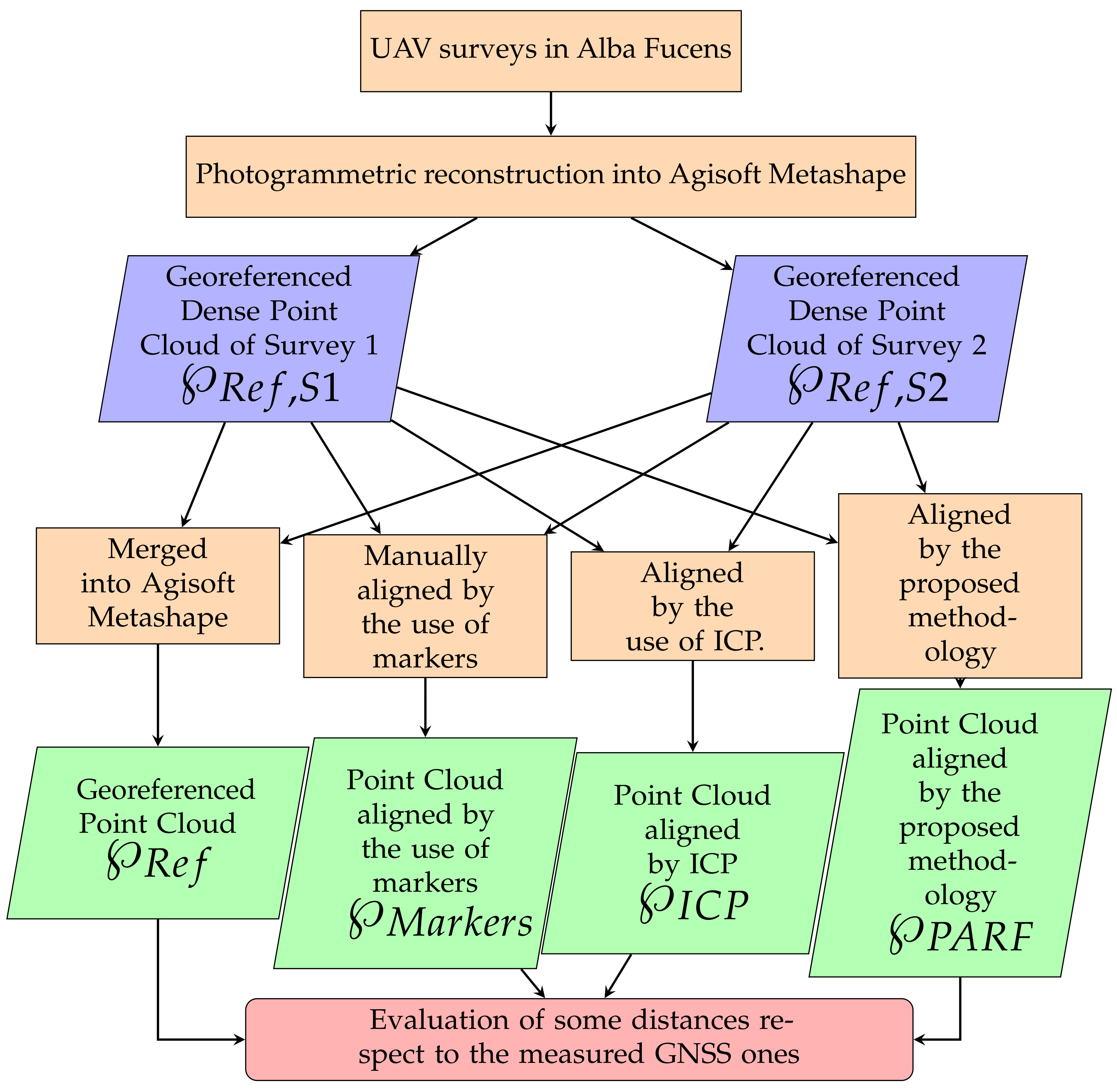
Figure 5 shows the main phases of the experiment. The area reported by
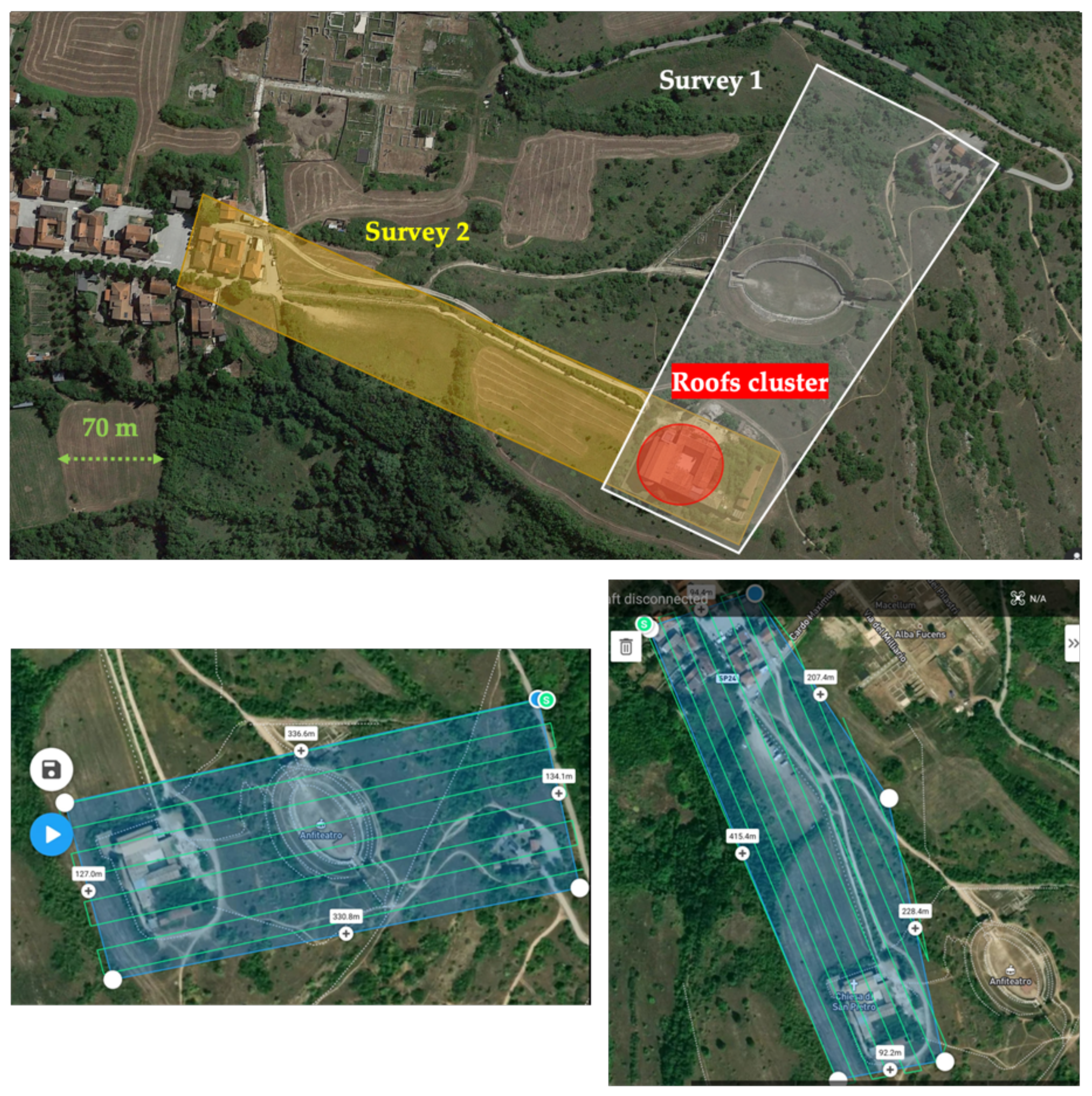
Figure 6 has been acquired, and 3D reconstructed through two different UAV surveys. These were performed on the date of 20 December 2021, using a DJI Matrice 200 V2, equipped with a DJI Zenmuse X5S, whose technical specifications are listed in
Table 5.
The flight plans have been set to guarantee a good overlap between images and establish the final GSD (Ground Sample Distance) as a function of the sensor focal length and the height flight. A side lap of 60% and an overlap of 70% have been established for these surveys. The flights have been set at 30 m of altitude from the starting area (red circle in
Figure 6) with a GSD of 0.66 cm/pixel. As the area is quite steep, the roof cluster, which is the starting point, is located in the highest part of the two surveys. The lowest area achieved about 55 m of flight altitude and 1.21 cm/pixel GSD. 417 and 475 images for the first and second flights have been taken. The flight plans for the two surveys are reported in
Figure 6. In addition, during the survey, 25 points were acquired by a GNSS (Global Navigation Satellite System) receiver in NRTK (Network Real-Time Kinematic) mode (
: 2–3 cm) that will be used for geo-referencing the point clouds and assessing their quality.
The acquired images have been processed into Agisoft Metashape Pro, obtaining two different point clouds:
the first point cloud referred to the area of Survey 1;
the second point cloud referred to the area of Survey 2;
The elaborations have been performed using the same settings for all the point clouds and, in particular, the most advanced preset (highest) for the Image Alignment and (“ultra-high”) for the Dense Point Cloud generation.
Table 6 presents the estimated errors on GCPs and CPs for every survey. An average error of 5.35 cm has been measured on the GCPs and 5.01 cm on the CPs for Survey 1, while the same error is 4.99 cm and 4.57 cm on the CPs for Survey 2. The obtained values demonstrate good quality of the final reconstructions, whose errors are comparable with those detected in similar works described by the literature. In
Table 7, the data associated with the photogrammetric reconstructions have been listed.
Figure 7 shows the results of Dense Point Cloud generation and the position of GCPs and CPs.
These two point clouds have been registered by four different methods, which are described in the following:
the registration of and has been performed into Agisoft Metashape. The two surveys, which have been processed in two different chunks, have been aligned with the “Align chunk” tool in the Program, using the marker-based method and the high preset. Then, the point clouds have been merged into a single one by the “Merge chunk” method. The resulting points cloud, characterized by over one and a half billion points, has been exported in .ply format according to the “WGS 84/UTM zone 33N” coordinate system. The GCP RMSE and CP RMSE are, respectively, 6.11 cm and 5.58 cm;
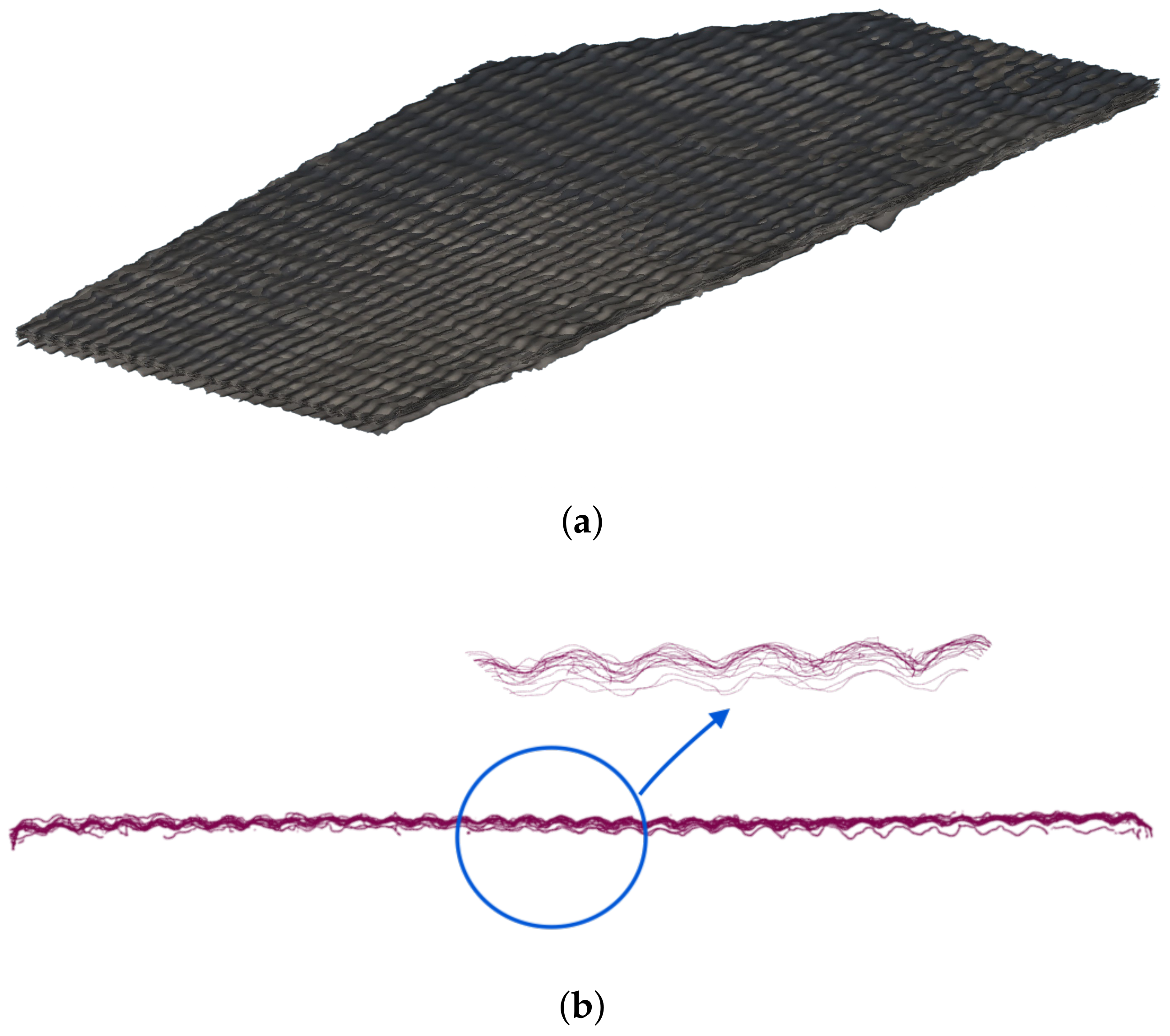
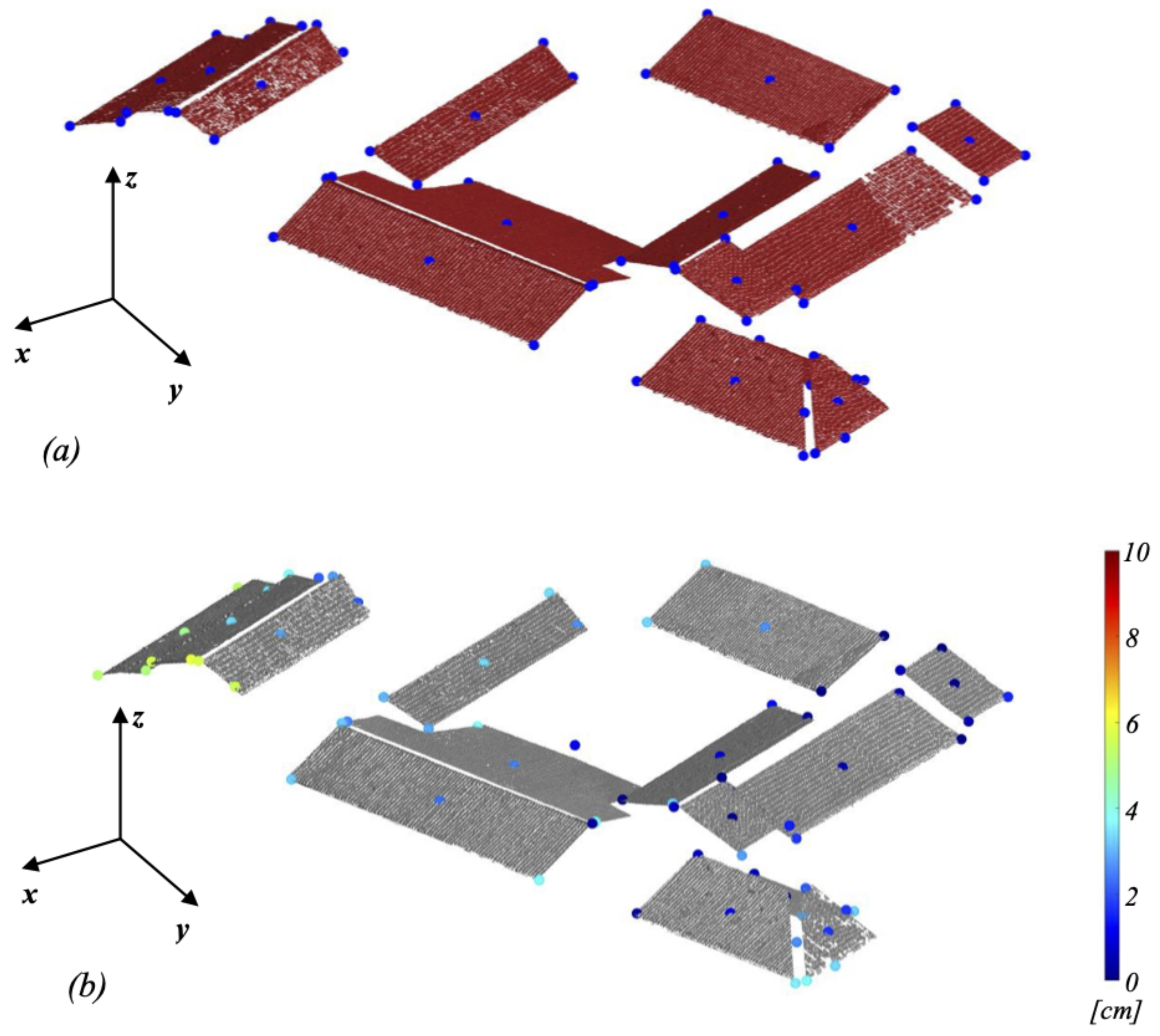
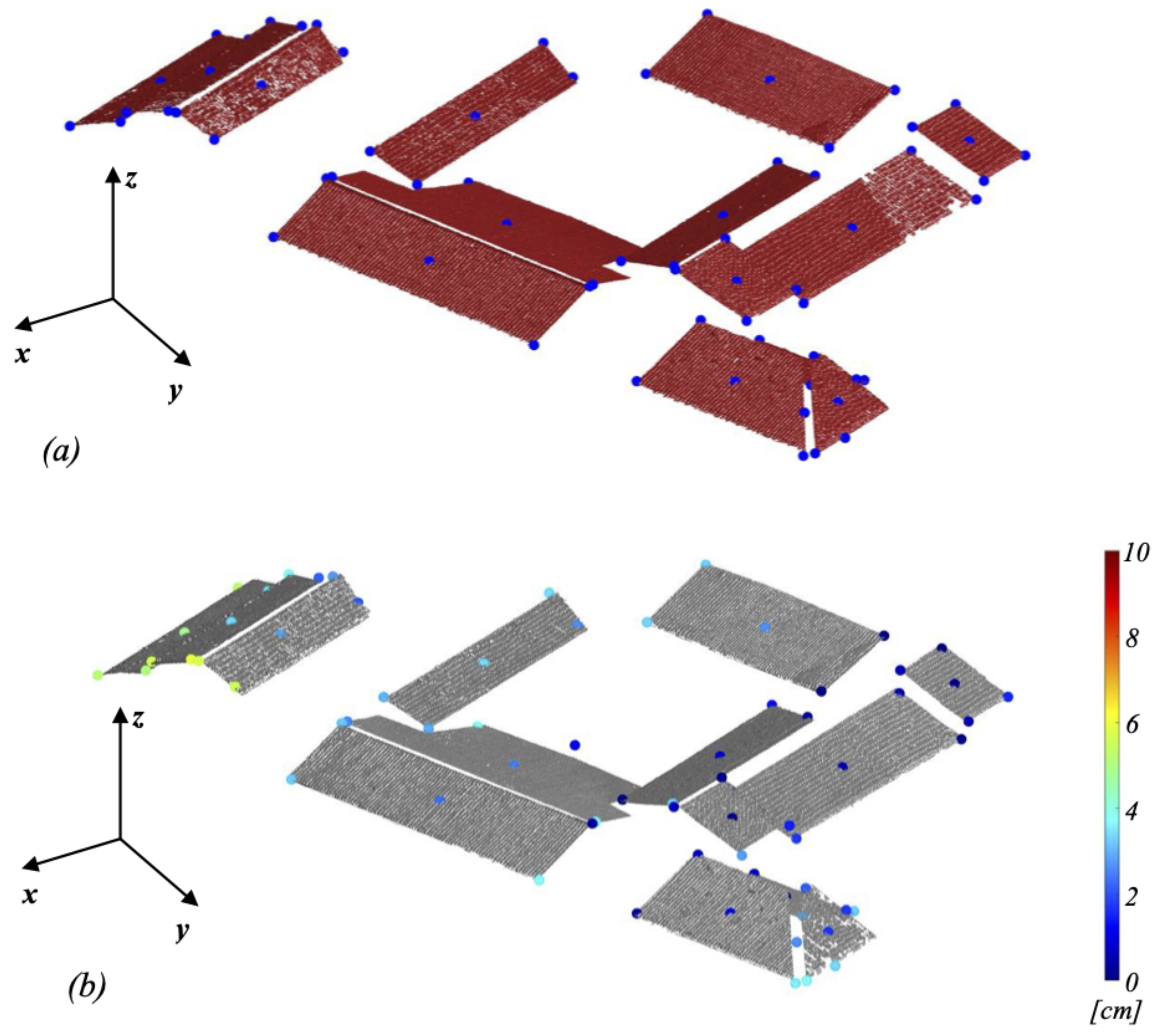
the PARF registration, described in
Section 2, has been coded in Matlab. In
Figure 8a, the features used to perform the alignment of the two-point clouds are shown; these are represented by the roof patches of San Pietro church (cf.
Figure 6 and
Figure 9). At the end of the optimization process, the objective function
assumed a value of 2.635. The evaluated transformation matrix
has been applied to the point cloud
for the alignment with the reference point cloud
, obtaining the
. In
Figure 8b, the point clouds of the features of Survey 1 have been superimposed on the features of Survey 2. In the same figure, the distances’ color map between the point cloud of Survey 2 to the reference feature of the Survey 1 is depicted.
, the registration between
and
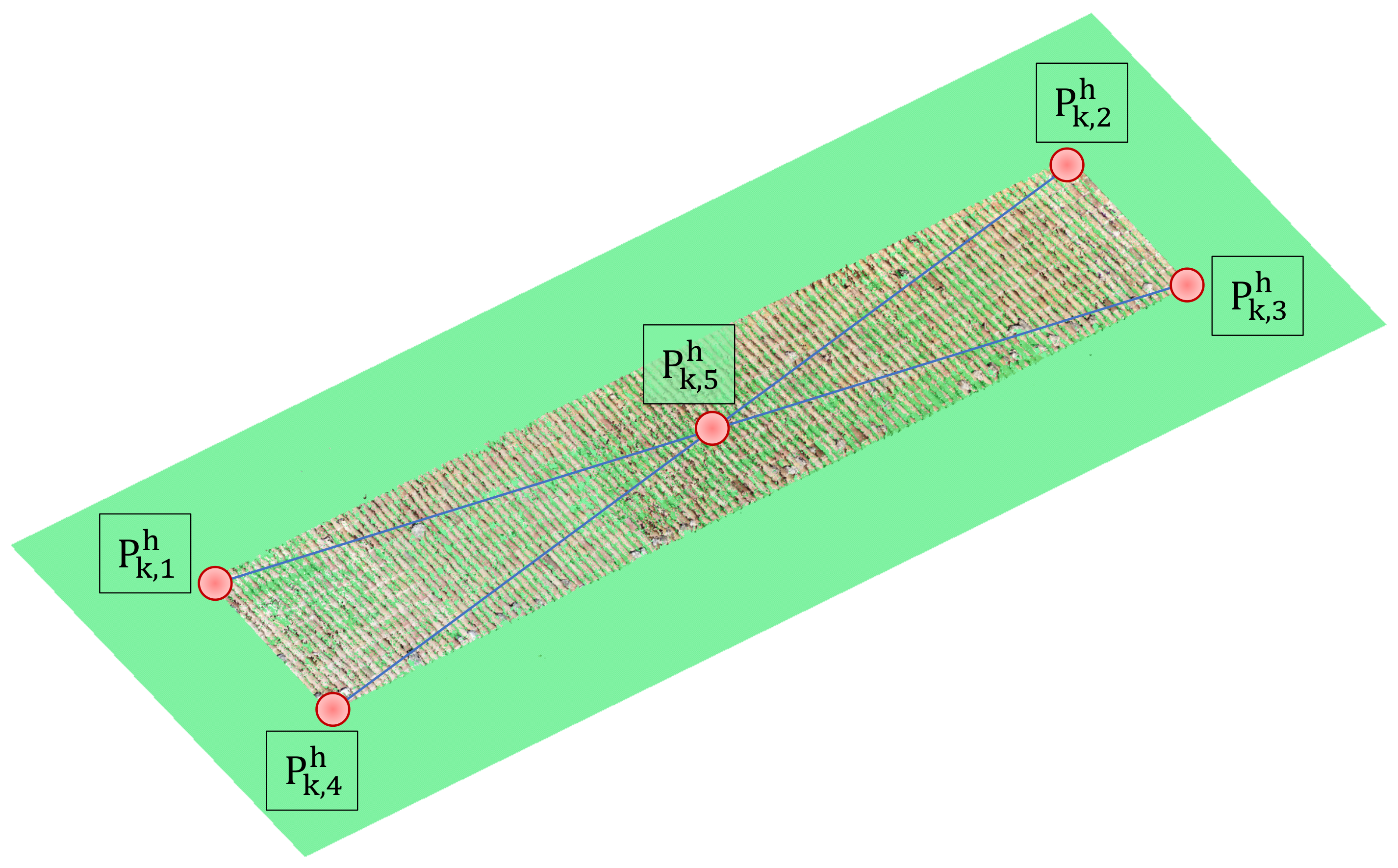
, has been performed by the use of natural markers; this is a standard practice in Reverse Engineering applications. Two-point clouds can be aligned by recognizing at least three common markers and applying a rigid transformation that permits them to overlap. This possibility is sub-ordered to the perfect correspondence between the considered point sets. This hypothesis is nearly impossible to verify in real-world situations, especially for photogrammetry. The overlapping between the point sets is generally handled as an optimization problem. The distance between the identified corresponding points is minimized; more correspondences are identified, and the quality of the realignment process should be better. Here, the “point pair realignment” procedure, implemented by CloudCompare, has been used for the marker-based alignment. The markers have been chosen manually by extracting a set of five markers identifiable in the common area of the two point clouds (
) (
Figure 9). The markers have been selected on the same roofs used as a reference to apply the
PARF alignment method. In this way, the results obtained by the two methodologies are comparable. The alignment has been performed with a Root Mean Square Error of the distance between the markers of 22 cm;
; another alignment has been executed by applying an ICP methodology. In this case, the points in the intersection area of Survey 1 and Survey 2 () have been used to apply the ICP. Due to a large number of points in and , a decimation has been done, resulting in a mean distance between points of 0.03 m. This value is comparable to the point cloud location estimated error. The ICP algorithm implemented in CloudCompare has been applied, assuming a RSE of 1 × and excluding the outliers from the optimization. The registration resulting from the ICP performs an RMSE of the distances between the points in the two clouds of 2 cm.
Six GCPs have been selected to compare the accuracy of the registration of
,
,
, and
: three belonging to Survey 1 (GPS0015, GPS0018 and GPS0020), three to the Survey 2 (GPS0008, GPS0009 and GPS0011). The Euclidean distance between these pairs of the selected markers has been calculated (cf.
Figure 10) and compared with the reference one, resulting from the GNSS measurements.
Table 8 reports the measured distances.
As expected, the marker method looks the worst; an average error of 0.33 m results from the three observed distances with respect to the GNSS measurement. The flaws introduced during the picking process explain such a significant inaccuracy, which is even more impacting when natural markers are used. Furthermore, due to the low dimensions of the data set utilized for alignment, local distortion significantly impacts the marker-based technique. On the other hand, the ICP method looks like the better one. An average error of 0.09 m results from the reference distances. The good ICP results can be explained by the sampling data set’s size, which in this case is extended to the entire area shared by the two studies. The presence of an inaccuracy, on the other side, indicates that local distortions have a significant influence that can only be addressed by using GCPs.
The results of the presented methodology (PARF) are not so dissimilar from those obtained from the ICP alignment. An average error of 0.12 m results from the three measurements in
Table 8. In this case, the sampling data set dimension is significantly smaller than the ICP. Moreover, it should be considered an additional source of error, generated by the approximation of the roof patches by planes and quantitatively experimented in
Section 2.2.
The decimation has provided an additional source of uncertainty during the post-processing (point-point space set to 0.03 cm). This operation has been necessary to process the point clouds into CloudCompare by the workstation used for experimentation, equipped with an Intel Xeon E5 with 64 Gb of RAM. Considering all the sources of errors introduced by the photogrammetric reconstruction and the post-processing operations, the results of the realignment by the proposed methodology look very interesting: the PARF-based method makes a maximum relative error of 0.11%, whereas that based on markers registration 0.40%. The results obtained using the proposed methodology did not require any artificial marker; the realignment process depends on the presence of roof features in common areas of the surveys.
Table 9 shows the different realignment times required for the adopted and compared point clouds.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}