
An Integrated Algorithm for Extracting Terrain Feature-Point Clusters Based on DEM Data


Abstract
1. Introduction
2. Materials and Methods
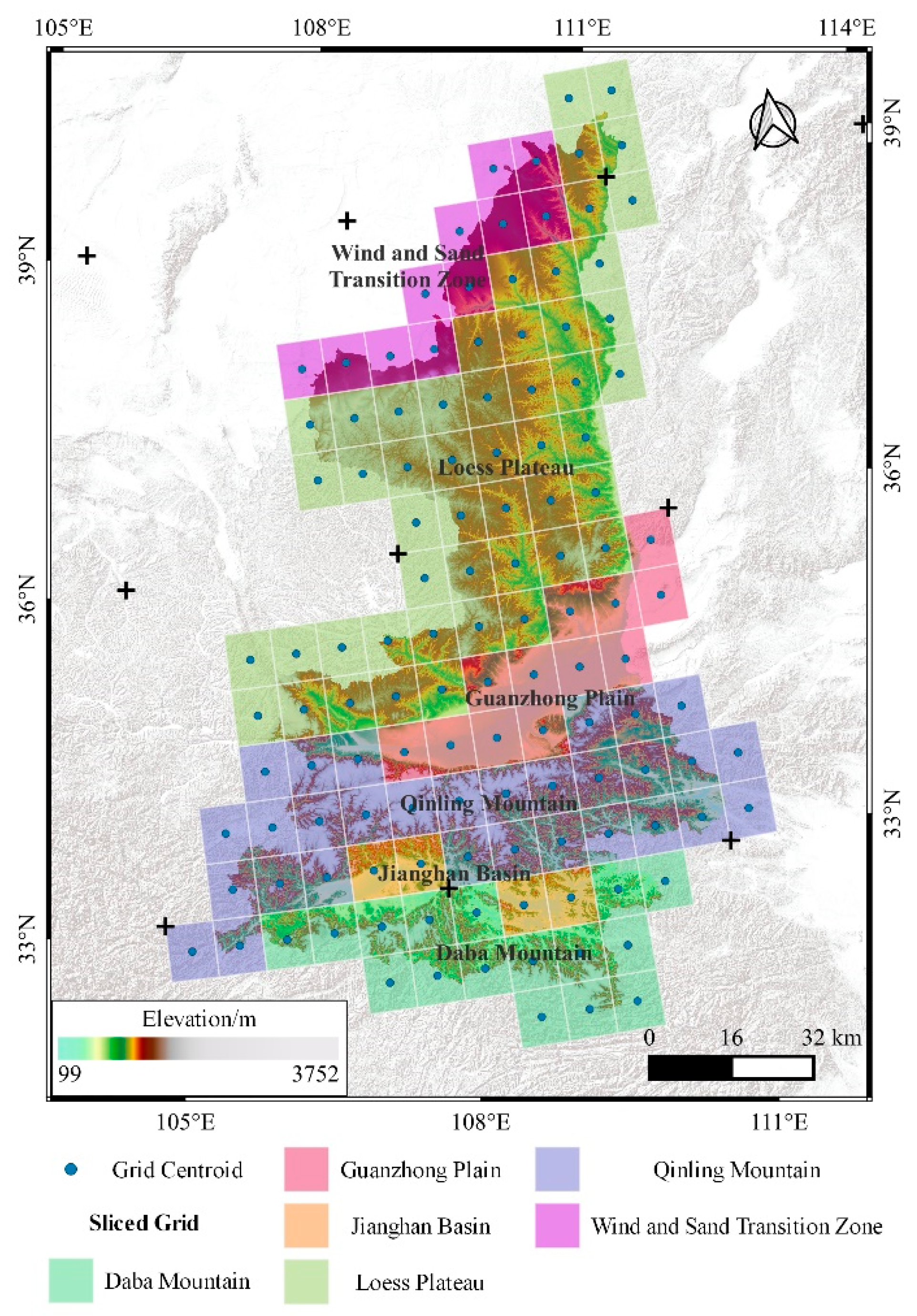
2.1. Study Area and Data
2.2. Methods
2.2.1. Positive Terrain-Constrained Ridgeline Extraction
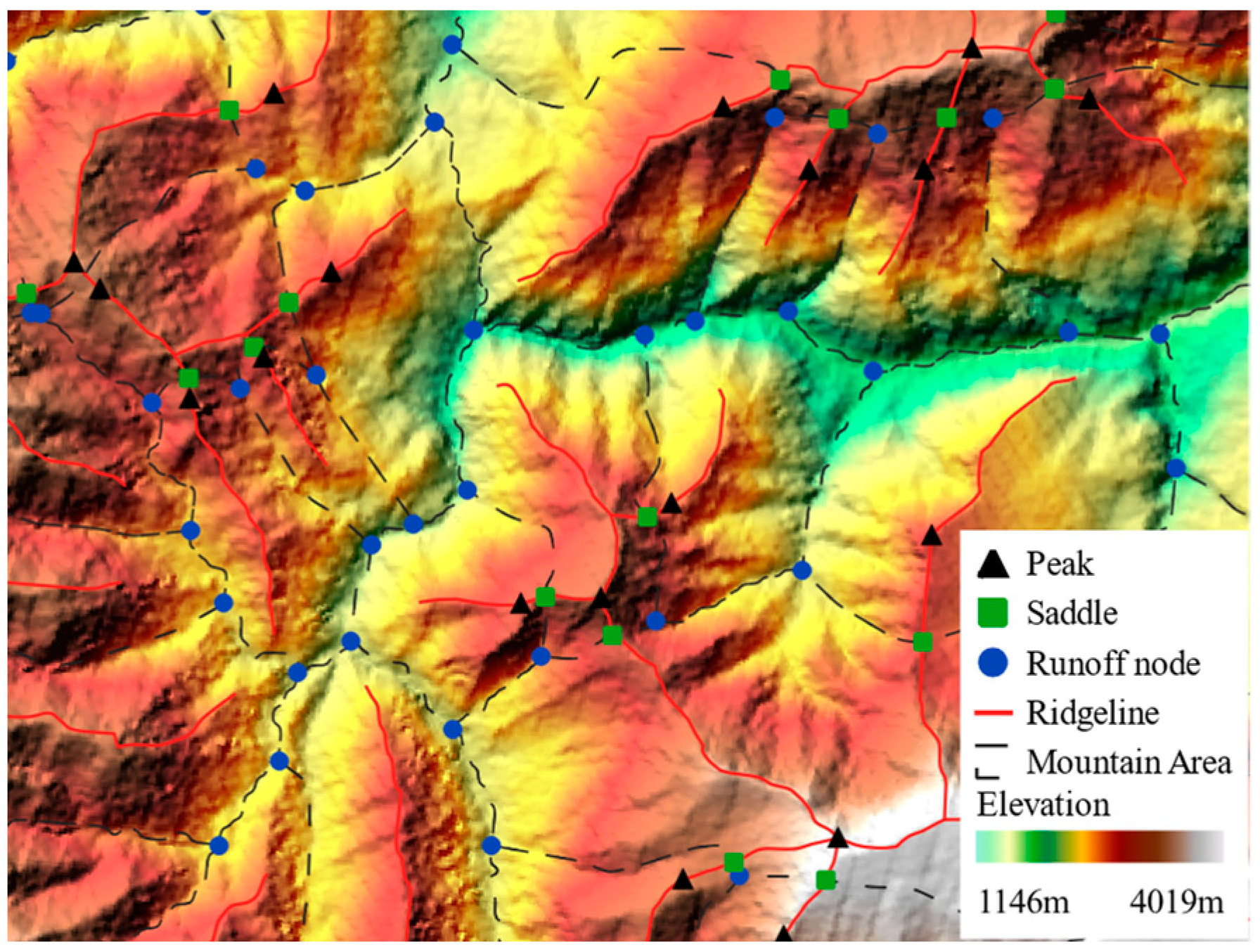
2.2.2. Terrain Feature-Point Cluster Extraction
3. Results and Discussion
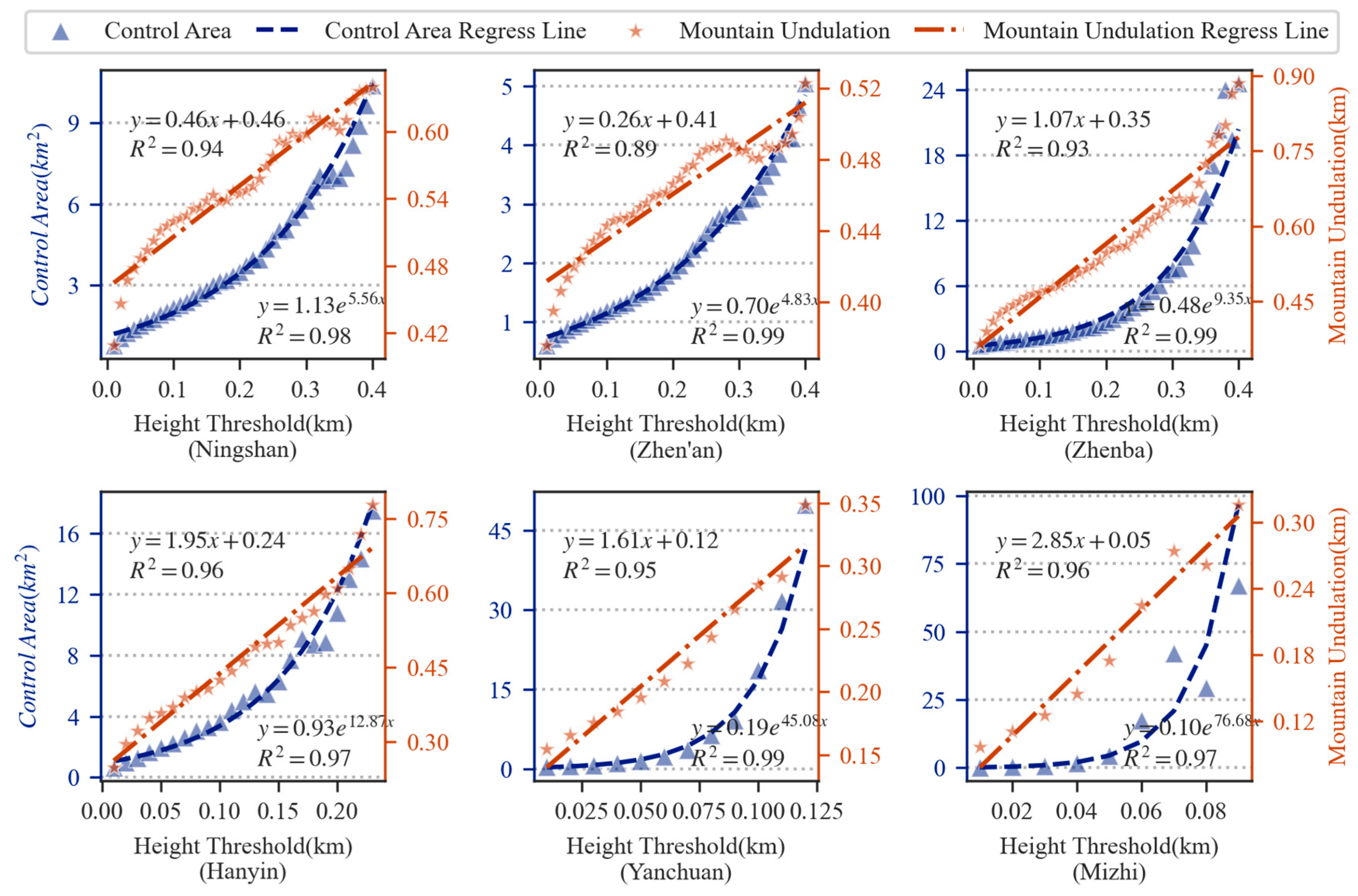
3.1. Results of Optimal Threshold Determination
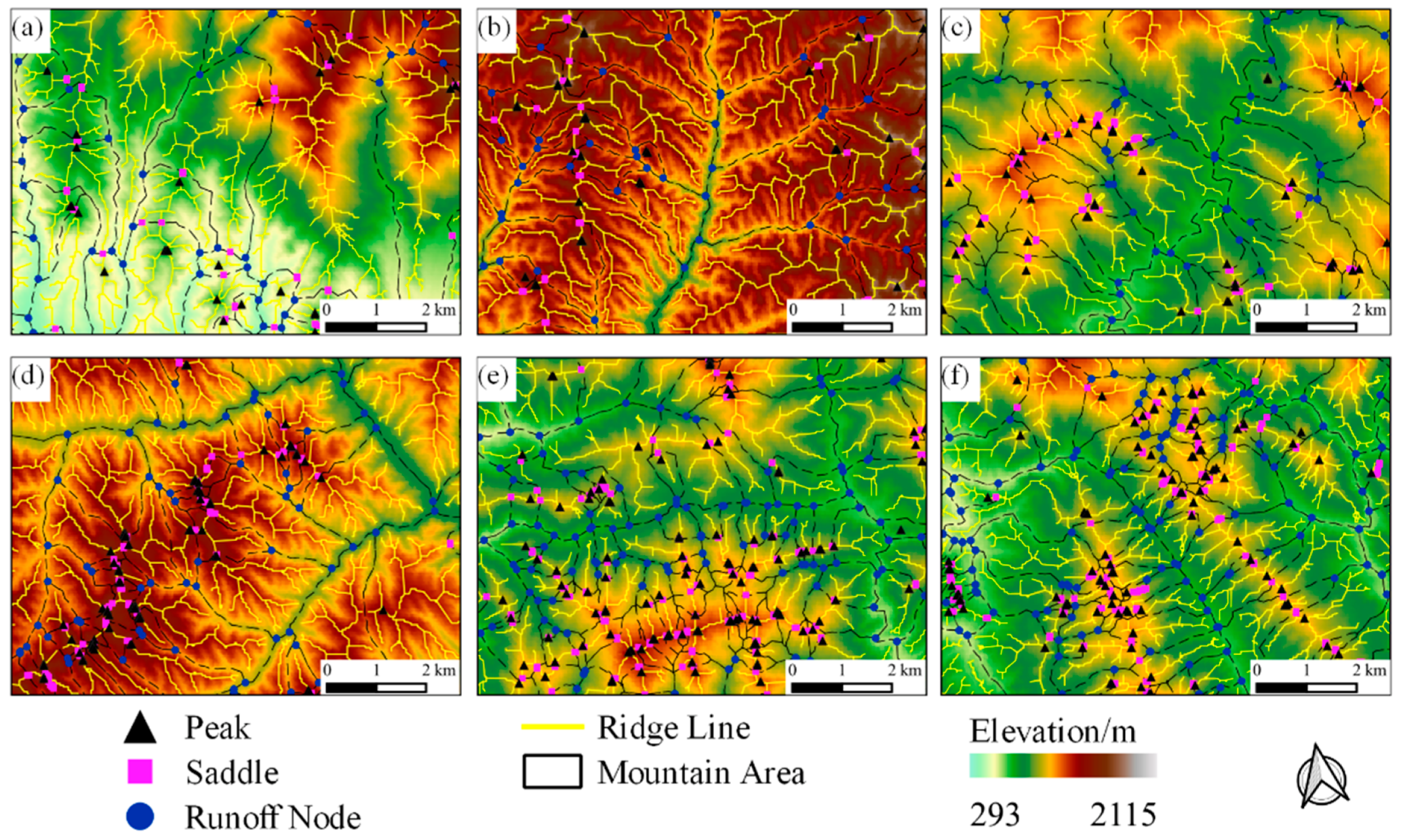
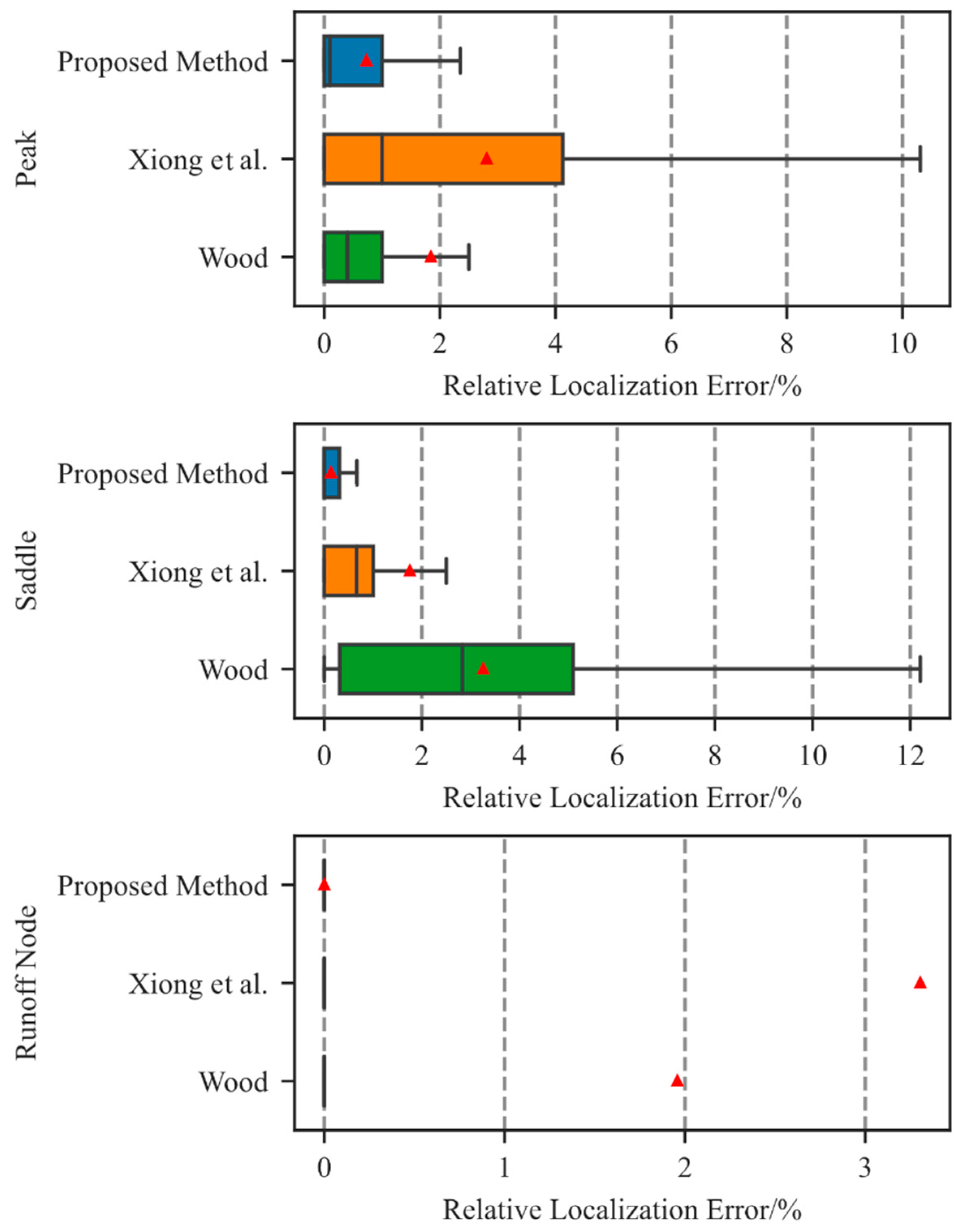
3.2. Extraction Results and Validations of Point Clusters
3.3. Statistics of Point Cluster Properties
3.4. Point Cluster Properties and Geomorphological Regionalization
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Peizhi, H.; Lai, P.-C. The Derivation of Skeleton Lines for Terrain Features. Geo-Spatial Inf. Sci. 2002, 5, 68–73. [Google Scholar] [CrossRef][Green Version]
- Li, M.; Wu, T.; Li, W.; Wang, C.; Dai, W.; Su, X.; Zhao, Y. Terrain Skeleton Construction and Analysis in Loess Plateau of Northern Shaanxi. ISPRS Int. J. Geo-Inf. 2022, 11, 136. [Google Scholar] [CrossRef]
- Li, S.; Hu, G.; Cheng, X.; Xiong, L.; Tang, G.; Strobl, J. Integrating Topographic Knowledge into Deep Learning for the Void-Filling of Digital Elevation Models. Remote Sens. Environ. 2022, 269, 112818. [Google Scholar] [CrossRef]
- Syzdykbayev, M.; Karimi, B.; Karimi, H. A Method for Extracting Some Key Terrain Features from Shaded Relief of Digital Terrain Models. Remote Sens. 2020, 12, 2809. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H. An Efficient Method for Identifying and Filling Surface Depressions in Digital Elevation Models for Hydrologic Analysis and Modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Lv, G.; Xiong, L.; Chen, M.; Tang, G.; Sheng, Y.; Liu, X.; Song, Z.; Lu, Y.; Yu, Z.; Zhang, K.; et al. Chinese Progress in Geomorphometry. J. Geogr. Sci. 2017, 27, 1389–1412. [Google Scholar] [CrossRef]
- Yang, X.; Tang, G.; Meng, X.; Xiong, L. Saddle Position-Based Method for Extraction of Depressions in Fengcong Areas by Using Digital Elevation Models. ISPRS Int. J. Geo-Inf. 2018, 7, 136. [Google Scholar] [CrossRef]
- Hu, J.; Tang, M.; Luo, M.; Wei, L.; Yan, Z.; Qin, Z. The extraction of characteristic elements of mountain based on DEM. J. Geo-Inf. Sci. 2020, 22, 422–430. [Google Scholar]
- Xiong, L.; Tang, G.; Yang, X.; Li, F. Geomorphology-Oriented Digital Terrain Analysis: Progress and Perspectives. J. Geogr. Sci. 2021, 31, 456–476. [Google Scholar] [CrossRef]
- Chen, Z.-T.; Guevara, J.A. Systematic Selection of Very Important Points (VIP) from Digital Terrain Model for Constructing Triangular Irregular Networks. Auto Cart. 1987, 8, 50–56. [Google Scholar]
- Gökgöz, T.; Hacar, M. Comparison of Two Methods for Multiresolution Terrain Modelling in GIS. Geocarto Int. 2020, 35, 1360–1372. [Google Scholar] [CrossRef]
- Cayley, A. On Contour and Slope Lines. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1859, 18, 264–268. [Google Scholar] [CrossRef]
- Maxwell, J.C. On Hills and Dales: To the Editors of the Philosophical Magazine and Journal. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1870, 40, 421–427. [Google Scholar] [CrossRef]
- Morse, M.; Cairns, S.S. Critical Point Theory in Global Analysis and Differential Topology; Academic Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Matsumoto, Y. An Introduction to Morse Theory; American Mathematical Society: Washington, DC, USA, 2002; Volume 208. [Google Scholar]
- Robins, V.; Wood, P.J.; Sheppard, A.P. Theory and Algorithms for Constructing Discrete Morse Complexes from Grayscale Digital Images. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1646–1658. [Google Scholar] [CrossRef]
- Čomić, L.; De Floriani, L.; Iuricich, F.; Magillo, P. Computing a Discrete Morse Gradient from a Watershed Decomposition. Comput. Graph. 2016, 58, 43–52. [Google Scholar] [CrossRef]
- Takahashi, S.; Ikeda, T.; Shinagawa, Y.; Kunii, T.L.; Ueda, M. Algorithms for Extracting Correct Critical Points and Constructing Topological Graphs from Discrete Geographical Elevation Data. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 1995; Volume 14, pp. 181–192. [Google Scholar]
- Pfaltz, J.L. Surface Networks. Geogr. Anal. 1976, 8, 77–93. [Google Scholar] [CrossRef]
- Wood, E.F.; Sivapalan, M.; Beven, K.; Band, L. Effects of Spatial Variability and Scale with Implications to Hydrologic Modeling. J. Hydrol. 1988, 102, 29–47. [Google Scholar] [CrossRef]
- Deng, Y.; Wilson, J.P.; Bauer, B.O. DEM Resolution Dependencies of Terrain Attributes Across a Landscape. Int. J. Geogr. Inf. Sci. 2007, 21, 187–213. [Google Scholar] [CrossRef]
- Magillo, P.; Danovaro, E.; De Floriani, L.; Papaleo, L.; Vitali, M. A Discrete Approach to Compute Terrain Morphology. In Proceedings of the Computer Vision and Computer Graphics. Theory and Applications; Braz, J., Ranchordas, A., Araújo, H.J., Pereira, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 13–26. [Google Scholar]
- Aumann, G.; Ebner, H.; Tang, L. Automatic Derivation of Skeleton Lines from Digitized Contours. ISPRS J. Photogramm. Remote Sens. 1991, 46, 259–268. [Google Scholar] [CrossRef]
- Liu, H.; Jin, H.; Miao, B. An Algorithm for Extracting Terrain Structure Lines Based on Contour Data. In Proceedings of the Sixth International Symposium on Digital Earth: Models, Algorithms, and Virtual Reality, Beijing, China, 9–12 September 2009; Volume 7840, pp. 286–291. [Google Scholar]
- Kong, Y.; Su, J.; Zhang, Y. A New Method of Extracting Terrain Feature Lines by Morphology. Information 2012, 15, 2585–2591. [Google Scholar]
- O’Callaghan, J.F.; Mark, D.M. The Extraction of Drainage Networks from Digital Elevation Data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Bakula, K.; Kurczynski, Z. The Role of Structural Lines Extraction from High-Resolution Digital Terrain Models in the Process of Height Data Reduction. In Proceedings of the Geoconference on Informatics, Geoinformatics and Remote Sensing-Conference Proceedings; Stef92 Technology Ltd.: Sofia, Bulgaria, 2013; Volume I, pp. 579–586. [Google Scholar]
- Zhang, S.; Zhao, B.; Erdun, E. Watershed Characteristics Extraction and Subsequent Terrain Analysis Based on Digital Elevation Model in Flat Region. J. Hydrol. Eng. 2014, 19, 04014023. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting Topographic Structure from Digital Elevation Data for Geographic Information System Analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Ariza-Villaverde, A.B.; Jiménez-Hornero, F.J.; Gutiérrez de Ravé, E. Influence of DEM Resolution on Drainage Network Extraction: A Multifractal Analysis. Geomorphology 2015, 241, 243–254. [Google Scholar] [CrossRef]
- Ma, Y.; Song, Y.; Zhang, W.; Kang, X.; Zhao, P. Method of Peak Extraction Based on Spatial Subdivision. J. Geomat. Sci. Technol. 2015, 32, 433–436, 440. [Google Scholar]
- Li, S.; Xiong, L.; Tang, G.; Strobl, J. Deep Learning-Based Approach for Landform Classification from Integrated Data Sources of Digital Elevation Model and Imagery. Geomorphology 2020, 354, 107045. [Google Scholar] [CrossRef]
- Luo, M.; Tang, G. Mountain peaks extraction based on geomorphology cognitive and space segmentation. Sci. Surv. Mapp. 2010, 35, 126–127, 253. [Google Scholar] [CrossRef]
- Vincent, L.; Soille, P. Watersheds in Digital Spaces: An Efficient Algorithm Based on Immersion Simulations. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 583–598. [Google Scholar] [CrossRef]
- Meyer, F. Topographic Distance and Watershed Lines. Signal Process. 1994, 38, 113–125. [Google Scholar] [CrossRef]
- Roerdink, J.B.T.M.; Meijster, A. The Watershed Transform: Definitions, Algorithms and Parallelization Strategies. Fundam. Inform. 2000, 41, 187–228. [Google Scholar] [CrossRef]
- Stoev, S.L.; Strasser, W. Extracting Regions of Interest Applying a Local Watershed Transformation. In Proceedings of the Proceedings Visualization 2000, Salt Lake City, UT, USA, 8–13 October 2000; pp. 21–28. [Google Scholar]
- Liu, Y.; Xiong, L.; Fang, X. Pattern Analysis of Terrain Feature Points of Loess Topography. Geogr. Geo-Inf. Sci. 2017, 33, 35–41. [Google Scholar]
- Liu, D. Preparation of small-scale stratified color topographic maps. Acta Geogr. Sin. 1957, 23, 447–458. [Google Scholar] [CrossRef]
- Zhou, Y. Investigation of Loess Positive and Negative Terrain Based on DEMs; Nanjing Normal University: Nanjing, China, 2008. [Google Scholar]
- Tang, G.; Liu, X.; Lv, G. Tutorials of Digital Elevation Models; Science Press: Beijing, China, 2016. [Google Scholar]
- Martha, T.R.; Vamsee, A.M.; Tripathi, V.; Kumar, K.V. Detection of Coastal Landforms in a Deltaic Area Using a Multi-Scale Object-Based Classification Method. Curr. Sci. 2018, 114, 1338–1345. [Google Scholar] [CrossRef]
- Lin, X.; Wen, J.; Liu, Q.; Xiao, Q.; You, D.; Wu, S.; Hao, D.; Wu, X. A Multi-Scale Validation Strategy for Albedo Products over Rugged Terrain and Preliminary Application in Heihe River Basin, China. Remote Sens. 2018, 10, 156. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H. The Factor of Scale in Remote Sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Drăguţ, L.; Eisank, C.; Strasser, T. Local Variance for Multi-Scale Analysis in Geomorphometry. Geomorphology 2011, 130, 162–172. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Xu, E. A Two-Level Nested Model for Extracting Positive and Negative Terrains Combining Morphology and Visualization Indicators. Ecol. Indic. 2020, 109, 105842. [Google Scholar] [CrossRef]
- Fisher, P.; Wood, J.; Cheng, T. Where Is Helvellyn? Fuzziness of Multi-scale Landscape Morphometry. Trans. Inst. Br. Geogr. 2004, 29, 106–128. [Google Scholar] [CrossRef]
- Schmidt, J.; Hewitt, A. Fuzzy Land Element Classification from DTMs Based on Geometry and Terrain Position. Geoderma 2004, 121, 243–256. [Google Scholar] [CrossRef]
- López-Vicente, M.; Álvarez, S. Influence of DEM Resolution on Modelling Hydrological Connectivity in a Complex Agricultural Catchment with Woody Crops. Earth Surf. Process. Landf. 2018, 43, 1403–1415. [Google Scholar] [CrossRef]
- Zhan, C. A Hybrid Line Thinning Approach. In Proceedings of the Auto-Carto; American Society for Photogrammetry and Remote Sensing: Minneapolis, MN, USA, 1993; p. 396. [Google Scholar]
- Band, L.; Robinson, V. Intelligent Land Information System Final Report; Toronto University: Toronto, ON, Canada, 1992. [Google Scholar]
- Smith, B.; Mark, D.M. Do Mountains Exist? Towards an Ontology of Landforms. Environ. Plan. B Plan. Des. 2003, 30, 411–427. [Google Scholar] [CrossRef]
- Zhu, L.-J.; Zhu, A.-X.; Qin, C.-Z.; Liu, J.-Z. Automatic Approach to Deriving Fuzzy Slope Positions. Geomorphology 2018, 304, 173–183. [Google Scholar] [CrossRef]
- Wood, J. The Geomorphological Characterisation of Digital Elevation Models. Ph.D. Thesis, University of Leicester, Leicester, UK, 1996. [Google Scholar]
- Xiong, L.-Y.; Tang, G.-A.; Zhu, A.-X.; Qian, Y.-Q. A Peak-Cluster Assessment Method for the Identification of Upland Planation Surfaces. Int. J. Geogr. Inf. Sci. 2017, 31, 387–404. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, J.; Xiong, L.; Tang, G. Clustering Gully Profiles for Investigating the Spatial Variation in Landform Formation on the Chinese Loess Plateau. J. Mt. Sci. 2021, 18, 2742–2760. [Google Scholar] [CrossRef]
- Nir, D. The Ratio of Relative and Absolute Altitudes of Mt. Carmel: A Contribution to the Problem of Relief Analysis and Relief Classification. Geogr. Rev. 1957, 47, 564–569. [Google Scholar] [CrossRef]
- Cheng, W.; Zhou, C.; Li, B.; Sheng, Y. Geomorphological regionalization theory system and division methodology of China. Acta Geogr. Sin. 2019, 74, 839–856. [Google Scholar]
- Wang, N.; Cheng, W.; Wang, B.; Liu, Q.; Zhou, C. Geomorphological Regionalization Theory System and Division Methodology of China. J. Geogr. Sci. 2020, 30, 212–232. [Google Scholar] [CrossRef]
- Lam, N.S.-N. Fractals and Scale in Environmental Assessment and Monitoring. Scale Geogr. Inq. Nat. Soc. Method 2004, 23–40. [Google Scholar] [CrossRef]
- Lam, N.S.-N.; Quattrochi, D.A. On the Issues of Scale, Resolution, and Fractal Analysis in the Mapping Sciences. Prof. Geogr. 1992, 44, 88–98. [Google Scholar] [CrossRef]
- Cao, C.; Lam, N.S.-N. Understanding the Scale and Resolution Effects in Remote Sensing and GIS. Scale Remote Sens. GIS 1997, 57, 72. [Google Scholar]
- Enzmann, R.D. Geomorphylogy-Expanded Theory; Fairbridge, R.W., Ed.; The Encyclopedia of Geomorphology, Reinhold Book Corporation: New York, NY, USA, 1968. [Google Scholar]
- Baker, V.R. Introduction: Regional Landform Analysis; Short, N.M., Blair, R.R., Eds.; Geomorphology from Space, A Global Overview of Regional Landforms; NASA: Washington, DC, USA, 1986. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Area Name | Landform Type | Geomorphological Region |
|---|---|---|
| Ningshan County | Qinling middle and high mountains | Qinling Mountains |
| Zhen’an County | Qinling middle mountains | Qinling Mountains |
| Zhenba County | Daba middle mountains | Daba Mountains |
| Hanyin County | Low hills and mountains | Hanzhong low hill and basin area |
| Yanchuan County | Loess ridge | Loess Plateau |
| Mizhi County | Loess hill | Loess Plateau |
| Point Cluster Type | Method Name | Avg./m | Std./m | PFM/% | PMM/% |
|---|---|---|---|---|---|
| Peak | Proposed Method | 21.87 | 58.21 | 48.15 | 87.99 |
| Wood | 55.32 | 112.68 | 37.63 | 73.38 | |
| Xiong et al. | 84.28 | 129.80 | 26.58 | 54.23 | |
| Saddle | Proposed Method | 4.11 | 5.81 | 60.23 | 100.00 |
| Wood | 97.68 | 103.81 | 20.20 | 37.66 | |
| Xiong et al. | 52.59 | 116.97 | 26.78 | 74.45 | |
| Runoff Node | Proposed Method | 0.00 | 0.02 | 99.92 | 100.00 |
| Wood | 58.74 | 291.74 | 88.31 | 92.81 | |
| Xiong et al. | 99.16 | 415.83 | 84.94 | 89.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Luo, M.; Bai, L.; Duan, J.; Yu, B. An Integrated Algorithm for Extracting Terrain Feature-Point Clusters Based on DEM Data. Remote Sens. 2022, 14, 2776. https://doi.org/10.3390/rs14122776
Hu J, Luo M, Bai L, Duan J, Yu B. An Integrated Algorithm for Extracting Terrain Feature-Point Clusters Based on DEM Data. Remote Sensing. 2022; 14(12):2776. https://doi.org/10.3390/rs14122776
Chicago/Turabian StyleHu, Jinlong, Mingliang Luo, Leichao Bai, Jinliang Duan, and Bing Yu. 2022. "An Integrated Algorithm for Extracting Terrain Feature-Point Clusters Based on DEM Data" Remote Sensing 14, no. 12: 2776. https://doi.org/10.3390/rs14122776
APA StyleHu, J., Luo, M., Bai, L., Duan, J., & Yu, B. (2022). An Integrated Algorithm for Extracting Terrain Feature-Point Clusters Based on DEM Data. Remote Sensing, 14(12), 2776. https://doi.org/10.3390/rs14122776