
Online Sequential Extreme Learning Machine-Based Active Interference Activity Prediction for Cognitive Radar


Abstract
:
1. Introduction
- (1)
- The OS-ELM-FP algorithm is proposed to predict the active interference activity in the frequency domain. Frequency state encoding is first performed on the perceived active interference spectrum to reduce the computational complexity of the prediction. Then, the OS-ELM-FP network architecture is constructed based on the interference state code to predict multichannel interference states in parallel, and the corresponding updating method for the OS-ELM-FP is given. With the single OS-ELM-FP network prediction model, the interference state in multiple frequency channels can be simultaneously predicted efficiently and accurately.
- (2)
- By constructing the single-input single-output OS-ELM-AP network model and deducing the corresponding updating formula, the OS-ELM-AP algorithm is proposed to predict active interference activity in the spatial domain. Based on the current interference direction estimates, the future interference angle can be efficiently predicted by the proposed method, and the cognitive anti-interference performance in the spatial domain is, thus, improved.
- (3)
- The prediction performance comparisons of various typical interference frequency schemes (including the two-state Markov process, the triangular sweep mode, the barrage interference and the stochastic interference with a certain probability) are presented in the analysis stage. Both the ballistic simulation data and the measured jamming data are accessed in the analysis stage of the interference state prediction in the spatial domain, which provides a detailed performance analysis of the proposed OS-ELM-AP model.
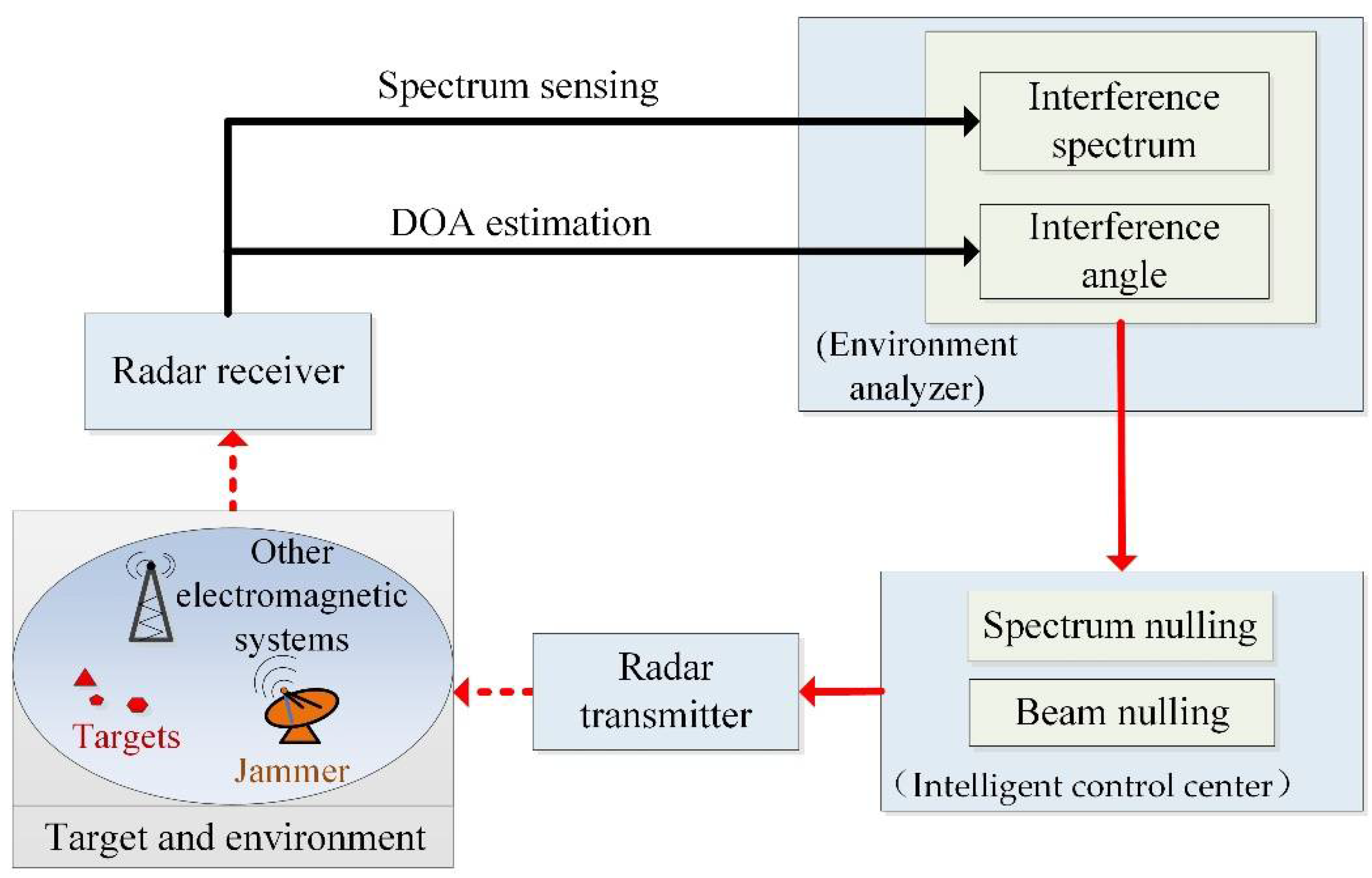
2. Anti-Active Interference Model for Cognitive Radar
3. Active Interference Activity Prediction Method
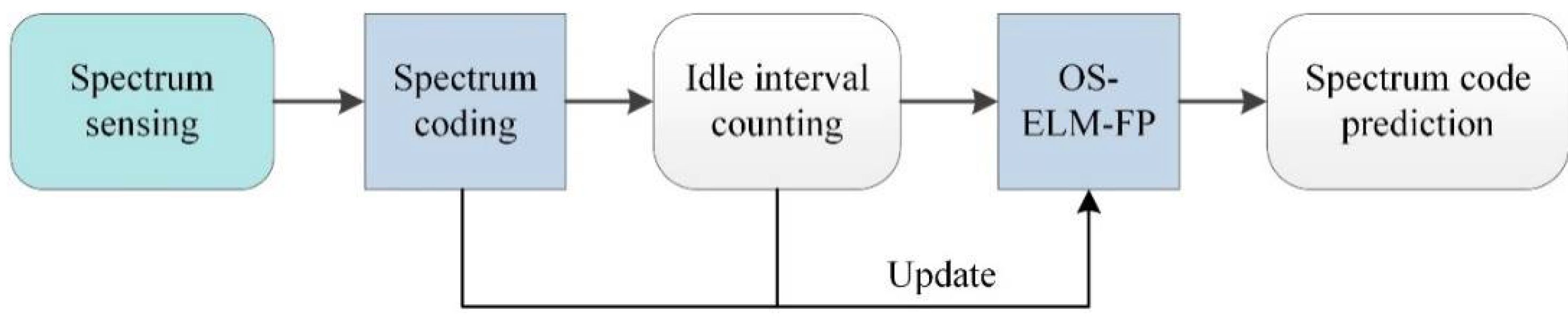
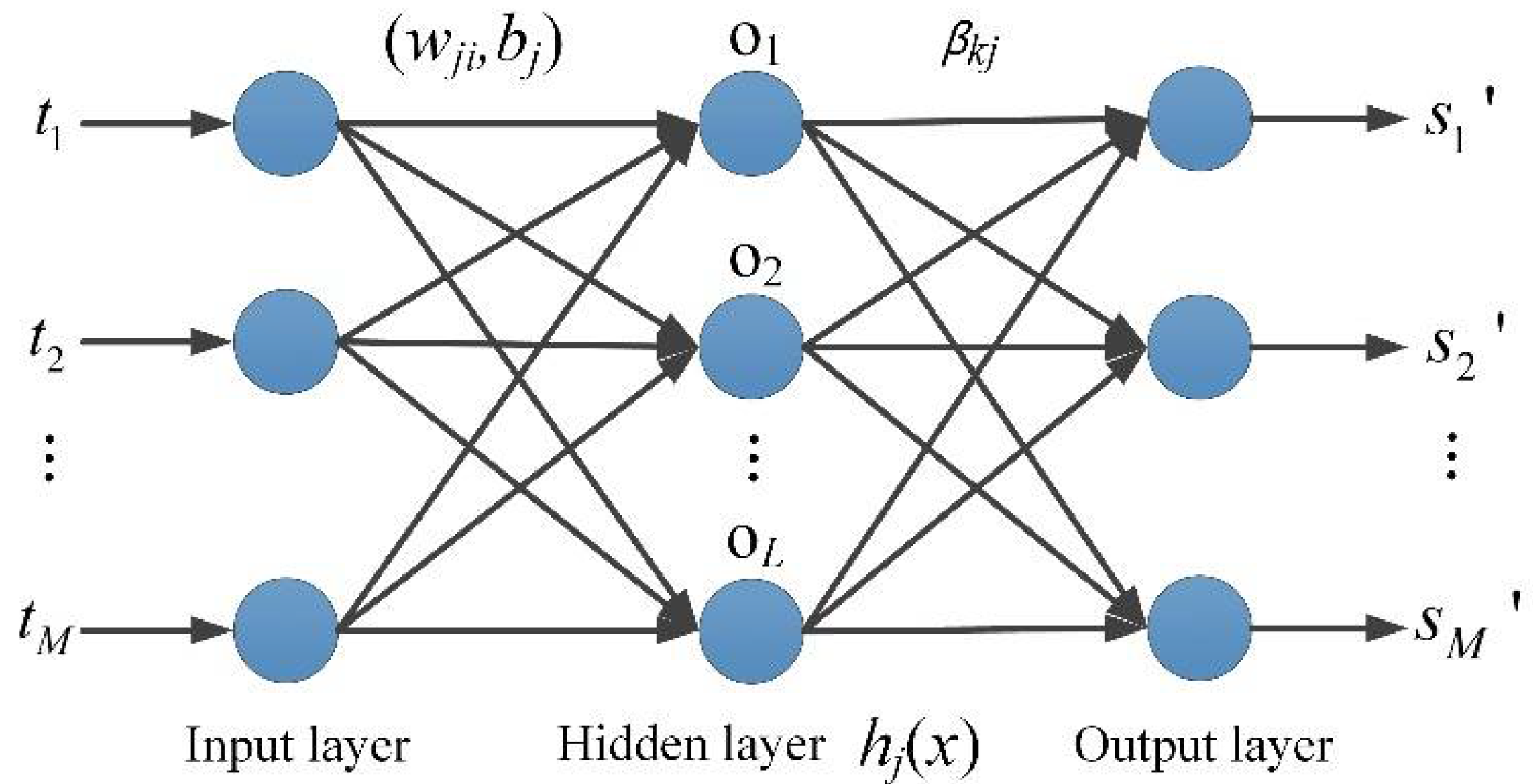
3.1. OS-ELM-FP-Based Active Interference State Prediction in the Frequency Domain
| Algorithm 1 OS-ELM-FP-based interference frequency prediction |
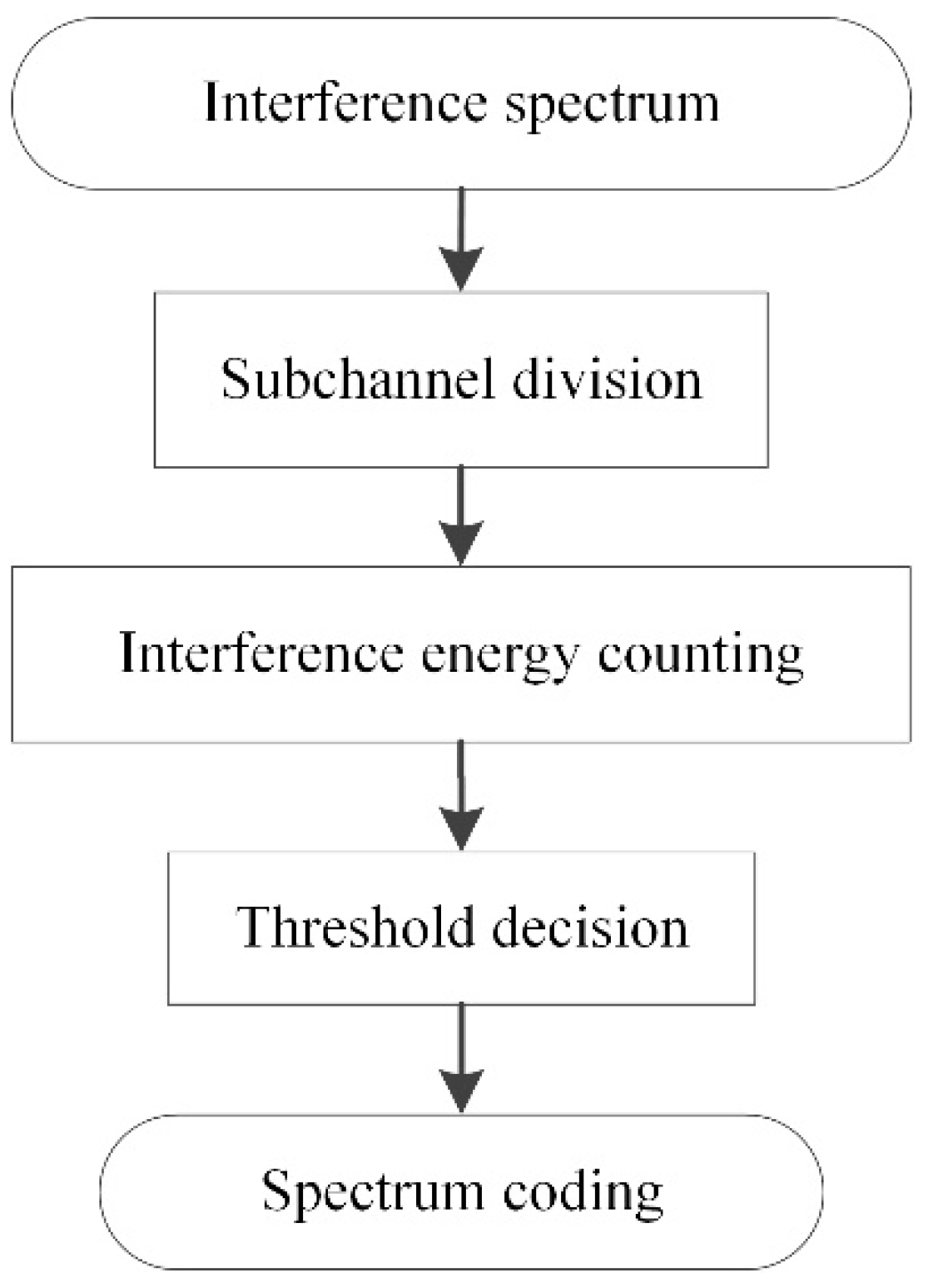
| Perform the following in the offline training phase. (1) Encode the active interference frequency state based on the radar system settings (spectrum sensing bandwidth and minimum working bandwidth), and count the idle interval vector t based on the state codes. (2) Determine the OS-ELM-FP network structure according to the dimension of the interference spectrum code, and randomly set the weight and bias connecting the input and hidden layers of the OS-ELM-FP network. (3) Compute the weight of the output layer by (12). Perform the following in the online training phase. (4) Update the idle interval vector t based on the updated interference spectrum code, and update the output weight of the OS-ELM-FP network by (14). |
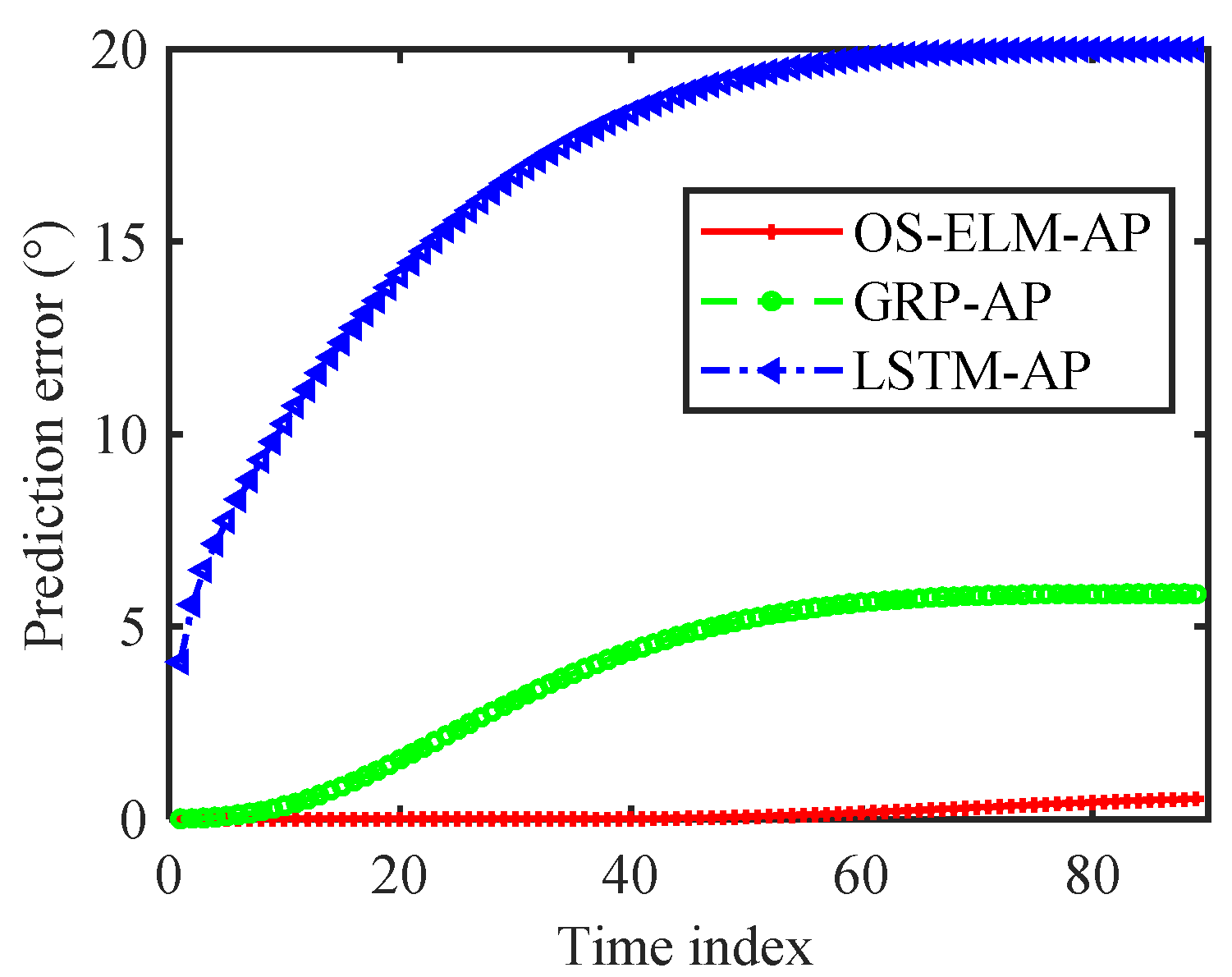
3.2. OS-ELM-AP-Based Active Interference State Prediction in the Spatial Domain
| Algorithm 2 OS-ELM-AP-based interference angle prediction |
| Perform the following in the offline training phase. (1) Set the dimension of the input and output layers of the OS-ELM-AP network to 1, and randomly set the weight and bias connecting the input and hidden layers of the OS-ELM-AP network. (2) Determine the weight connecting the hidden layer and the output layer by (18). Perform the following in the online training phase: (3) Update the output weight of the OS-ELM-AP network by (20) based on the updated interference DOA estimation. |
4. Results and Analyses
4.1. Analysis of the Single-Time Prediction Performance
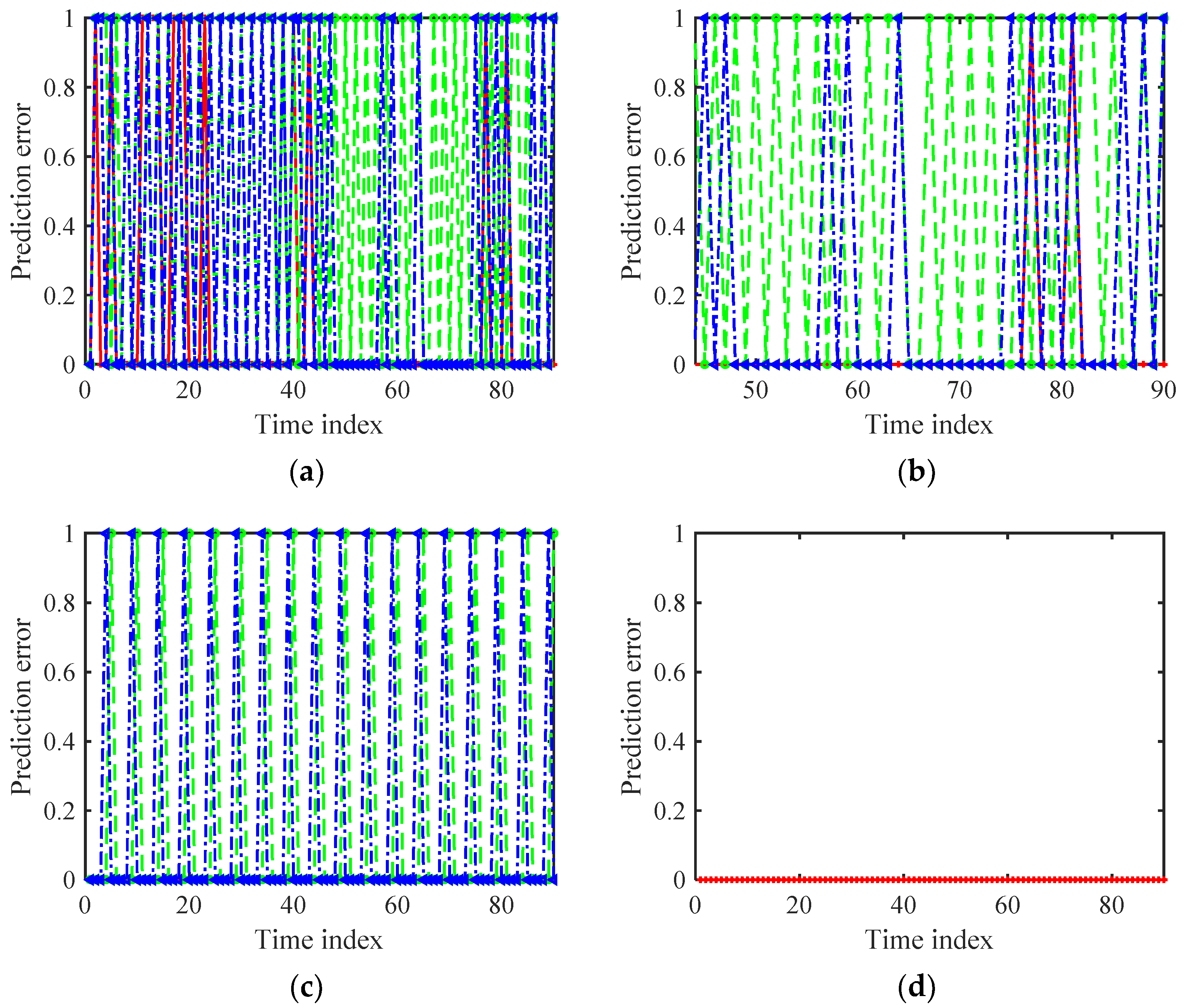
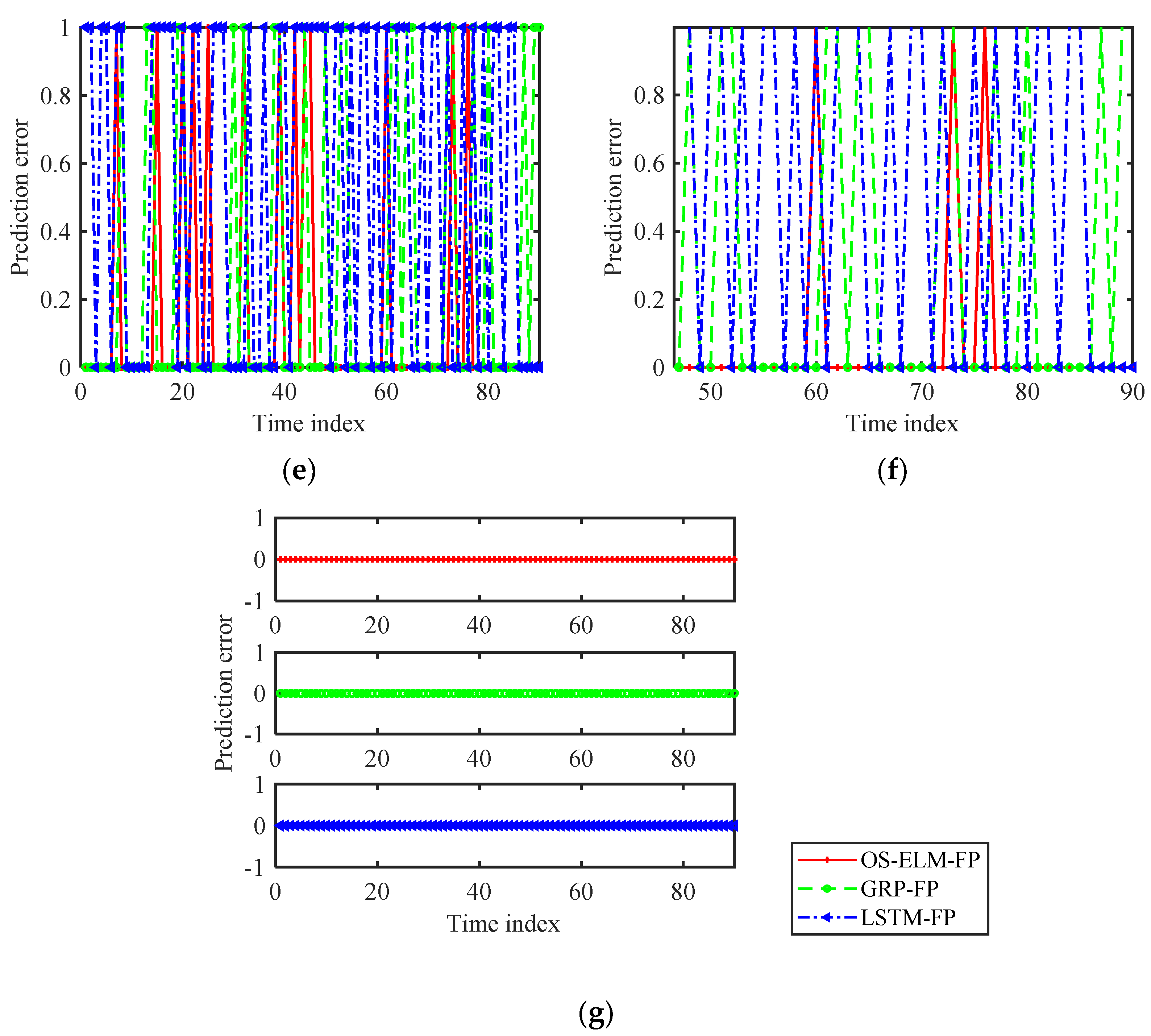
4.2. Analysis of the Continuous Multitime Prediction Performance
4.3. Analysis of Interference Activity Prediction Performance Based on Measured Data
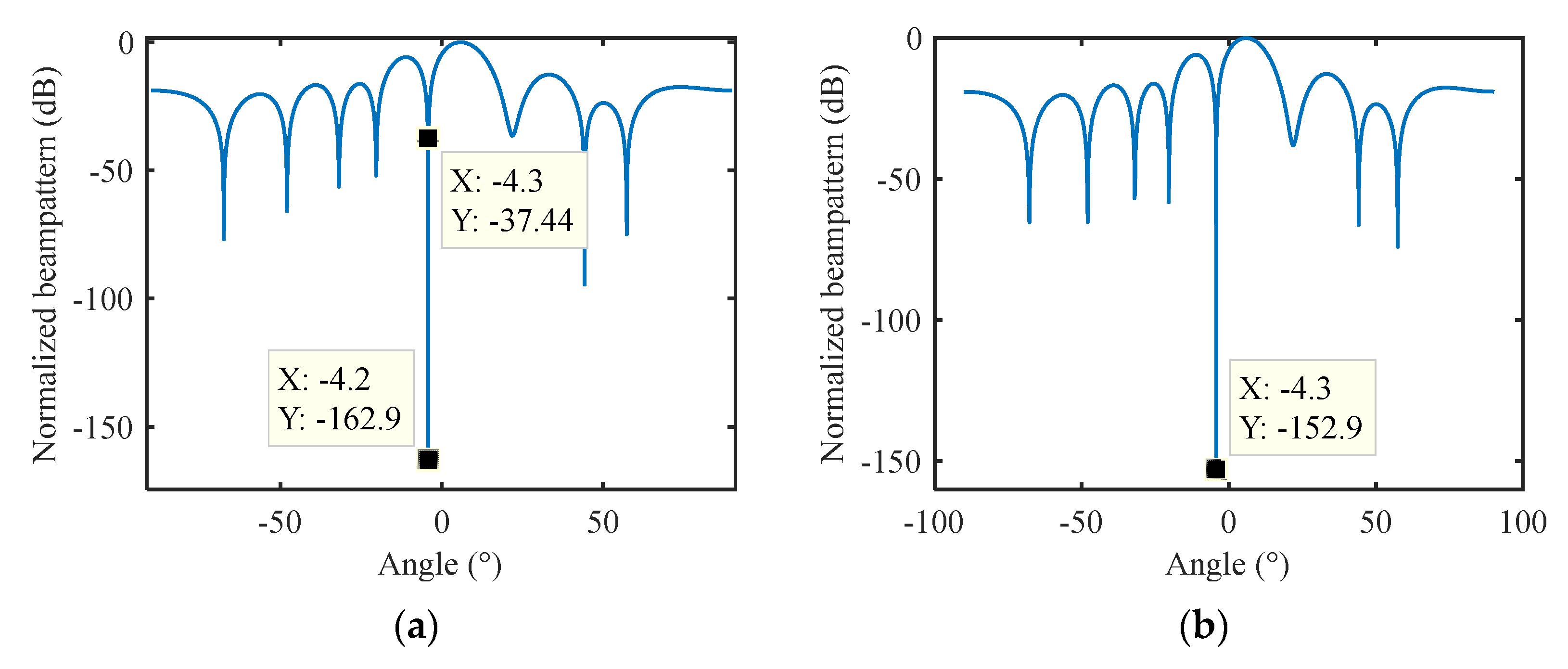
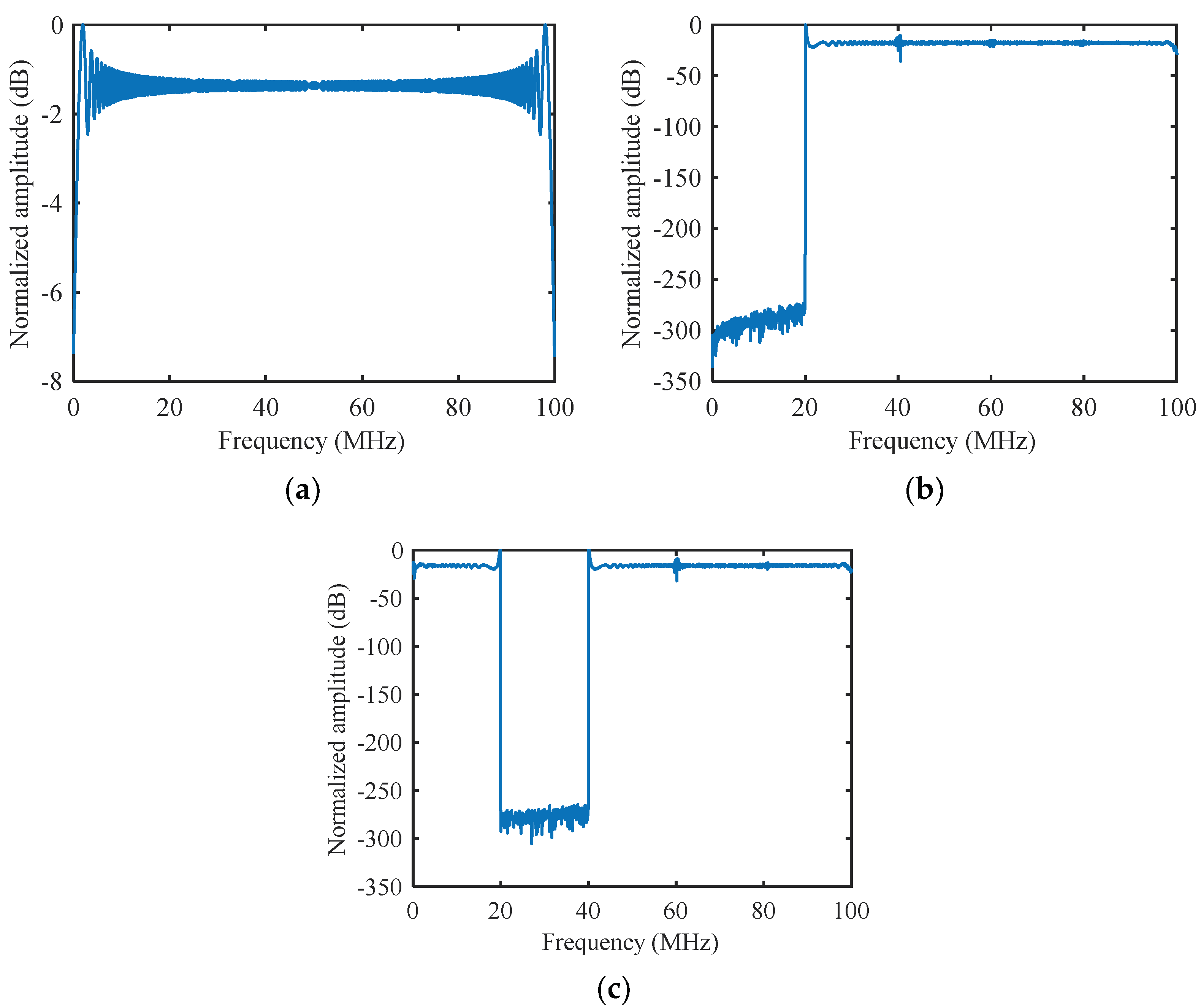
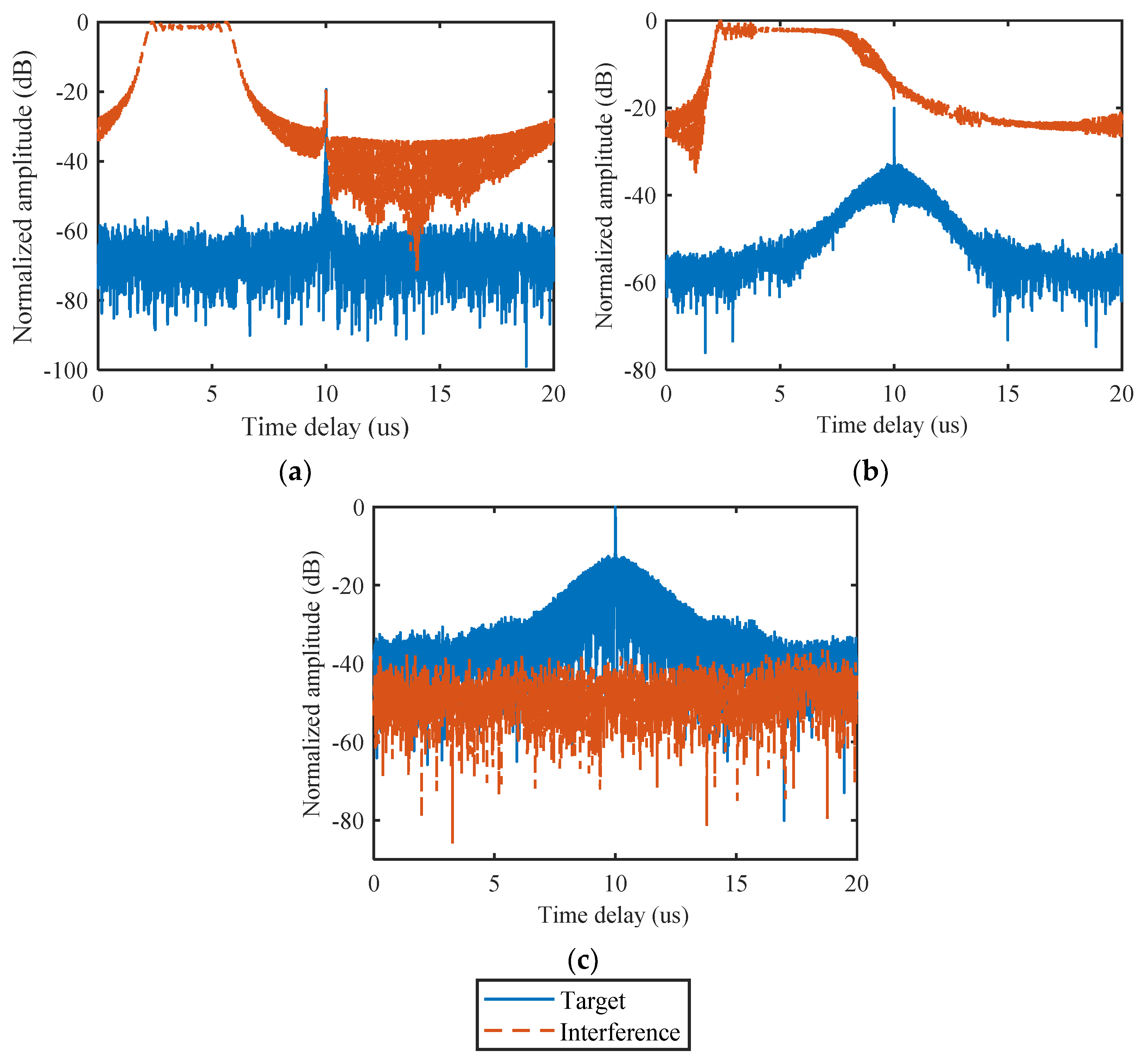
4.4. Analysis of the Anti-Active Interference Performance Based on Interference Activity Predictions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ding, L.; Li, R.; Wang, Y.; Dai, L.; Chen, F. Discrimination and identification between mainlobe repeater jamming and target echo by basis pursuit. IET Radar Sonar Navig. 2017, 11, 11–20. [Google Scholar] [CrossRef]
- Chen, X.; Shu, T.; Yu, K.-B.; Zhang, Y.; Lei, Z.; He, J.; Yu, W. Implementation of an adaptive wideband digital array radar processor using subbanding for enhanced jamming cancellation. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 762–775. [Google Scholar] [CrossRef]
- Yu, H.; Liu, N.; Zhang, L.; Li, Q.; Zhang, J.; Tang, S.; Zhao, S. An Interference suppression method for multistatic radar based on noise subspace projection. IEEE Sens. J. 2020, 20, 8797–8805. [Google Scholar] [CrossRef]
- Govoni, M.A.; Li, H.; Kosinski, J.A. Low probability of interception of an advanced noise radar waveform with Linear-FM. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1351–1356. [Google Scholar]
- Tang, B.; Naghsh, M.M.; Tang, J. Relative entropy-based waveform design for MIMO radar detection in the presence of clutter and interference. IEEE Trans. Signal Process. 2015, 63, 3783–3796. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Z.; Xie, R.; Ran, L.; Wang, J. MIMO radar waveform design for target detection in the presence of interference. Digit. Signal Process. 2021, 114, 103060. [Google Scholar] [CrossRef]
- Aubry, A.; Carotenuto, V.; De Maio, A.; Farina, A.; Pallotta, L. Optimization theory-based radar waveform design for spectrally dense environments. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 14–25. [Google Scholar] [CrossRef]
- Li, K.; Jiu, B.; Liu, H.; Pu, W. Robust antijamming strategy design for frequency-agile radar against main lobe jamming. Remote Sens. 2021, 13, 3043. [Google Scholar] [CrossRef]
- Thornton, C.E.; Kozy, M.A.; Buehrer, R.M.; Martone, A.F.; Sherbondy, K.D. Deep reinforcement learning control for radar detection and tracking in congested spectral environments. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1335–1349. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Z.; Xie, R.; Ran, L. Reinforcement learning for compressed-sensing based frequency agile radar in the presence of active interference. Remote Sens. 2022, 14, 968. [Google Scholar] [CrossRef]
- Chung, H.; Kang, J.; Kim, H.; Park, Y.M.; Kim, S. Adaptive beamwidth control for mmwave beam tracking. IEEE Commun. Lett. 2021, 25, 137–141. [Google Scholar] [CrossRef]
- Blandino, S.; Bertrand, T.; Desset, C.; Bourdoux, A.; Pollin, S.; Louveaux, J. A blind beam tracking scheme for millimeter wave systems. In Proceedings of the IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Agarwal, A.; Gangopadhyay, R.; Dubey, S.; Debnath, S.; Khan, M.A. Learning-based predictive dynamic spectrum access framework: A practical perspective for enhanced QoE of secondary users. IET Commun. 2018, 12, 2243–2252. [Google Scholar] [CrossRef]
- Eltom, H.; Kandeepan, S.; Moran, B.; Evans, R.J. Spectrum occupancy prediction using a hidden Markov model. In Proceedings of the International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, QLD, Australia, 14–16 December 2015. [Google Scholar]
- Sharma, M.; Sahoo, A. Stochastic model based opportunistic channel access in dynamic spectrum access networks. IEEE Trans. Mob. Comput. 2014, 13, 1625–1639. [Google Scholar] [CrossRef]
- Kovarskiy, J.A. Comparing stochastic and Markov decision process approaches for predicting radio frequency interference. In Proceedings of the Radar Sensor Technol. XXIII, Baltimore, MD, USA, 15–17 April 2019. [Google Scholar]
- Martone, A.F. Metacognition for radar coexistence. In Proceedings of the IEEE International Radar Conference, Washington, DC, USA, 28–30 April 2020; pp. 55–66. [Google Scholar] [CrossRef]
- Stinco, P.; Greco, M.; Gini, F.; Himed, B. Cognitive radars in spectrally dense environments. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 20–27. [Google Scholar] [CrossRef]
- Kovarskiy, J.A.; Kirk, B.H.; Martone, A.F.; Narayanan, R.M.; Sherbondy, K.D. Evaluation of real-time predictive spectrum sharing for cognitive radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 690–705. [Google Scholar] [CrossRef]
- Song, H.-L.; Ko, Y.-C. Beam alignment for high-speed UAV via angle prediction and adaptive beam coverage. IEEE Trans. Veh. Technol. 2021, 70, 10185–10192. [Google Scholar] [CrossRef]
- Shawel, B.S.; Woldegebreal, D.H.; Pollin, S. Convolutional LSTM-based long-term spectrum prediction for dynamic spectrum access. In Proceedings of the 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Radhakrishnan, N.; Kandeepan, S. An improved initialization method for fast learning in long short-term memory-based markovian spectrum prediction. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 729–738. [Google Scholar] [CrossRef]
- Huang, G.; Huang, G.B.; Song, S.; You, K. Trends in extreme learning machines: A review. Neural Netw. 2015, 61, 32–48. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Huang, G.; Song, S.; Gupta, J.N.D.; Wu, C. Semi-supervised and unsupervised extreme learning machines. IEEE Trans. Cybern. 2014, 44, 2405–2417. [Google Scholar] [CrossRef]
- Benoît, F.; van Heeswijk, M.; Miche, Y.; Verleysen, M.; Lendasse, A. Feature selection for nonlinear models with extreme learning machines. Neurocomputing 2013, 102, 111–124. [Google Scholar] [CrossRef]
- Li, Y.; Gu, X.P. Application of online SVR in very short-term load forecasting. Int. Rev. Electr. Eng. 2013, 8, 277–282. [Google Scholar]
- Liang, N.-Y.; Huang, G.-B.; Saratchandran, P.; Sundararajan, N. A fast and accurate online sequential learning algorithm for feedforward networks. IEEE Trans. Neural Netw. 2006, 17, 1411–1423. [Google Scholar] [CrossRef]
- Zheng, J.; Yang, T.; Liu, H.; Su, T. Efficient data transmission strategy for IIoTs with arbitrary geometrical array. IEEE Trans. Ind. Informatics 2021, 17, 3460–3468. [Google Scholar] [CrossRef]
- Martone, A.F.; Ranney, K.I.; Sherbondy, K.; Gallagher, K.A.; Blunt, S.D. Spectrum allocation for noncooperative radar coexistence. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 90–105. [Google Scholar] [CrossRef]
- Zheng, J.; Yang, T.; Liu, H.; Su, T.; Wan, L. Accurate detection and localization of unmanned aerial vehicle swarms-enabled mobile edge computing system. IEEE Trans. Ind. Inform. 2021, 17, 5059–5067. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, R.; Yang, T.; Liu, X.; Liu, H.; Su, T.; Wan, L. An efficient strategy for accurate detection and localization of UAV swarms. IEEE Internet Things J. 2021, 8, 15372–15381. [Google Scholar] [CrossRef]
- Zhang, M.; Qu, H.; Xie, X.; Kurths, J. Supervised learning in spiking neural networks with noise-threshold. Neurocomputing 2017, 219, 333–349. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Xiang, W. Robust optimization framework for training shallow neural networks using reachability method. In Proceedings of the 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 14–17 December 2021; pp. 3857–3862. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interference | Scheme |
|---|---|
| Markov | Occupies each frequency subchannel according to the two-state Markov process defined as:  . . |
| Triangular sweep | Sweeps over the available frequency bands with triangular behavior. |
| Barrage | Occupies all the frequency channels. |
| Stochastic | Occupies the 5 frequency subchannels with probabilities [0.5 0.3 0.1 0.1 0]. |
| Signal Domain | Offline Training Set Size | Input/Output Size | Kernel Function | Initial Noise Standard Deviation | Signal Standard Deviation | Feature Length Scale |
|---|---|---|---|---|---|---|
| Space | 10 | 1 | square exponential | 0.2 | 3.5 | 6.2 |
| Frequency | 10 | 1 | square exponential | 0.2 | 3.5 | 6.2 |
| Signal Domain | Offline Training Set Size | Input/Output Size | Hidden Layer Size | Solution Machine | Iterations | Initial Learning Rate | Reduction Factor of Learning Rate |
|---|---|---|---|---|---|---|---|
| Space | 10 | 1 | 10 | ‘adam’ | 250 | 0.005 | 0.2 |
| Frequency | 10 | 5 | 10 | ‘adam’ | 250 | 0.005 | 0.2 |
| Signal Domain | Offline Training Set Size | Input/Output Size | Transfer Function | Hidden Layer Size |
|---|---|---|---|---|
| Space | 10 | 1 | Sigmoid | 10 |
| Frequency | 10 | 5 | Sigmoid | 10 |
| Algorithm | Online Update Time of Angle Prediction (s) | Online Update Time of Frequency Prediction (s) |
|---|---|---|
| OS-ELM-AP/FP | 0.0016 | 0.0017 |
| GRP-AP/FP | 0.1038 | 0.9510 |
| LSTM-AP/FP | 3.7835 | 3.8407 |
| Algorithm | Angle Prediction Error | Frequency Prediction Error | |||
|---|---|---|---|---|---|
| Markov | Triangular Sweep | Stochastic | Barrage Interference | ||
| OS-ELM-AP/FP | 0.1340° | 0.5111 | 0.2000 | 0.1444 | 0 |
| GRP-AP/FP | 3.8678° | 0.5111 | 0.2000 | 0.2444 | 0 |
| LSTM-AP/FP | 16.8456° | 0.5111 | 0.2000 | 0.5000 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Liu, Z.; Xie, R.; Ran, L. Online Sequential Extreme Learning Machine-Based Active Interference Activity Prediction for Cognitive Radar. Remote Sens. 2022, 14, 2737. https://doi.org/10.3390/rs14122737
Wang S, Liu Z, Xie R, Ran L. Online Sequential Extreme Learning Machine-Based Active Interference Activity Prediction for Cognitive Radar. Remote Sensing. 2022; 14(12):2737. https://doi.org/10.3390/rs14122737
Chicago/Turabian StyleWang, Shanshan, Zheng Liu, Rong Xie, and Lei Ran. 2022. "Online Sequential Extreme Learning Machine-Based Active Interference Activity Prediction for Cognitive Radar" Remote Sensing 14, no. 12: 2737. https://doi.org/10.3390/rs14122737
APA StyleWang, S., Liu, Z., Xie, R., & Ran, L. (2022). Online Sequential Extreme Learning Machine-Based Active Interference Activity Prediction for Cognitive Radar. Remote Sensing, 14(12), 2737. https://doi.org/10.3390/rs14122737