
A Sparse-Model-Driven Network for Efficient and High-Accuracy InSAR Phase Filtering



 ,
,  ,
,  , ,
, ,
Abstract
:
1. Introduction
- (1)
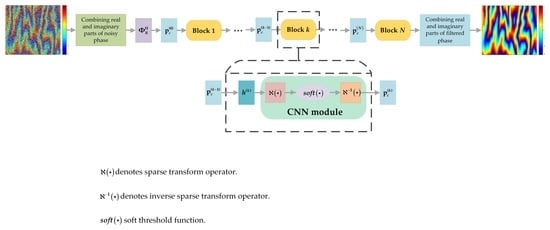
- We first built an InSAR phase filtering model. Then, the SMD-Net was designed based on the idea of unrolling the ISTA algorithm of solving the model into a simple network architecture, which enhanced the interpretability of the network. Subsequently, the SMD-Net transformed the interferometric phase into a real matrix consisting of the real and imaginary parts of the phase to achieve a complex-valued filtering operation.
- (2)
- Unlike the traditional ISTA algorithm setting the sparse transform by handcrafting, the SMD-Net exploits a CNN module to automatically learn the sparse basis operation, which enhances the filtering performance.
- (3)
- Plenty of simulated and measured experiments illustrate that the proposed method achieves efficiency and high-precision filtering.
2. Principle and Model
2.1. InSAR Phase Noise Principle
2.2. InSAR Phase SR Filtering Model
3. Methodology
3.1. Network Architecture
3.1.1. The SMD-Net Architecture
3.1.2. CNN Module Architecture
3.2. Loss Function
4. Experiments
4.1. Experimental Data
4.2. Experimental Details
4.3. Evaluation Metrics
5. Results
5.1. Results on the Simulation Data
5.2. Results on the Real Data
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, T.; Zhang, X. A Full-Level Context Squeeze-and-Excitation ROI Extractor for SAR Ship Instance Segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4506705. [Google Scholar] [CrossRef]
- Fischer, G.; Papathanassiou, K.P.; Hajnsek, I. Modeling and Compensation of the Penetration Bias in InSAR DEMs of Ice Sheets at Different Frequencies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2698–2707. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. HTC+ for SAR Ship Instance Segmentation. Remote Sens. 2022, 14, 2395. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Zhang, T. Lite-YOLOv5: A Lightweight Deep Learning Detector for On-Board Ship Detection in Large-Scene Sentinel-1 SAR Images. Remote Sens. 2022, 14, 1018. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X.; Liu, C.; Xu, X.; Zhan, X.; Wang, C.; Ahmad, I.; Zhou, Y.; Pan, D.; et al. HOG-ShipCLSNet: A Novel Deep Learning Network with HOG Feature Fusion for SAR Ship Classification. IEEE Trans. Geosci. Remote. Sens. 2021, 60, 5210322. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, Y.; Fu, H.; Zhu, J.; Yu, Y.; Li, R.; Zhang, S.; Qu, Z.; Hu, S. Parameterized Modeling and Calibration for Orbital Error in TanDEM-X Bistatic SAR Interferometry over Complex Terrain Areas. Remote Sens. 2021, 13, 5124. [Google Scholar] [CrossRef]
- Zhu, X.X.; Wang, Y.; Montazeri, S.; Ge, N. A Review of Ten-Year Advances of Multi-Baseline SAR Interferometry Using TerraSAR-X Data. Remote Sens. 2018, 10, 1374. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Fu, H.; Zhu, J.; Liu, Z.; Zhang, B.; Wang, C.; Li, Z.; Hu, J.; Yu, Y. Estimation of subcanopy topography based on single-baseline TanDEM-X InSAR data. J. Geod. 2021, 95, 84. [Google Scholar] [CrossRef]
- Hu, J.; Ge, Q.; Liu, J.; Yang, W.; Du, Z.; He, L. Constructing Adaptive Deformation Models for Estimating DEM Error in SBAS-InSAR Based on Hypothesis Testing. Remote Sens. 2021, 13, 2006. [Google Scholar] [CrossRef]
- Richter, N.; Froger, J.L. The role of Interferometric Synthetic Aperture Radar in detecting, mapping, monitoring, and modelling the volcanic activity of Piton de la Fournaise, La Réunion: A review. Remote Sens. 2020, 12, 1019. [Google Scholar] [CrossRef] [Green Version]
- Moreira, J.; Schwabisch, M.; Fornaro, G.; Lanari, R.; Bamler, R.; Just, D.; Steinbrecher, U.; Breit, H.; Eineder, M.; Franceschetti, G.; et al. X-SAR Interferometry: First Results. IEEE Trans. Geosci. Remote Sens. 1995, 33, 950–956. [Google Scholar] [CrossRef]
- Xu, G.; Gao, Y.; Li, J.; Xing, M. InSAR phase denoising: A review of current technologies and future directions. IEEE Geosci. Remote Sens. Mag. 2020, 8, 64–82. [Google Scholar] [CrossRef] [Green Version]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Xia, X.G.; Wang, G.Y. Phase Unwrapping and A Robust Chinese Remainder Theorem. IEEE Signal Process. Lett. 2007, 14, 247–250. [Google Scholar] [CrossRef]
- Suksmono, A.B.; Hirose, A. Interferometric SAR image restoration using Monte Carlo metropolis method. IEEE Trans. Signal Process. 2002, 50, 290–298. [Google Scholar] [CrossRef]
- Wang, Q.S.; Huang, H.F.; Yu, A.X.; Dong, Z. An Efficient and Adaptive Approach for Noise Filtering of SAR Interferometric Phase Images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1140–1144. [Google Scholar] [CrossRef]
- Abdallah, W.B.; Abdelfattah, R. A modification to the ASM filter for improving SAR interferograms. In Proceedings of the 21st European Signal Processing Conference (EUSIPCO 2013), Marrakech, Morocco, 9–13 September 2013; pp. 1–5. [Google Scholar]
- Lee, J.S.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Chao, C.F.; Chen, K.S.; Lee, J.S. Refined filtering of interferometric phase from InSAR data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5315–5323. [Google Scholar] [CrossRef]
- Fu, S.H.; Long, X.J.; Yang, X.; Yu, Q.F. Directionally adaptive filter for synthetic aperture radar interferometric phase images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 552–559. [Google Scholar] [CrossRef]
- Deledalle, C.A.; Denis, L.; Tupin, F. NL-InSAR: Nonlocal interferogram estimation. IEEE Trans. Geosci. Remote Sens. 2011, 4, 1441–1452. [Google Scholar] [CrossRef]
- Quereda, A.M.; Lopez-Sanchez, J.M.; Selva, J.; Gonzalez, P.J. An improved phase filter for differential SAR interferometry based on an iterative method. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4477–4491. [Google Scholar] [CrossRef] [Green Version]
- Zha, X.J.; Fu, R.S.; Dai, Z.Y.; Liu, B. Noise reduction in interferograms using the wavelet packet transform and wiener filtering. IEEE Geosci. Remote Sens. Lett. 2008, 5, 404–408. [Google Scholar]
- Bian, Y.; Mercer, B. Interferometric SAR phase filtering in the wavelet domain using simultaneous detection and estimation. IEEE Geosci. Remote Sens. 2011, 4, 1396–1416. [Google Scholar] [CrossRef]
- Baran, I.; Stewart, M.; Kampes, B.; Lilly, P. A modification to the Goldstein radar interferogram filter. IEEE Geosci. Remote Sens. 2011, 4, 1396–1416. [Google Scholar] [CrossRef] [Green Version]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Li, Z.; Li, S.; Liu, W.; Li, J.; Liu, A.; Li, W. A Nonlocal Noise Reduction Method Based on Fringe Frequency Compensation for SAR Interferogram. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9756–9767. [Google Scholar] [CrossRef]
- Sica, F.; Cozzolino, D.; Zhu, X.X.; Verdoliva, L.; Poggi, G. INSAR-BM3D: A nonlocal filter for SAR interferometric phase restoration. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3456–3467. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Zimmer, A.; Mukherjee, S.; Kottayil, N.K.; Ghuman, P.; Cheng, I. DeepInSAR—A Deep Learning Framework for SAR Interferometric Phase Restoration and Coherence Estimation. Remote Sens. 2020, 12, 2340. [Google Scholar] [CrossRef]
- Pu, L.; Zhang, X.; Zhou, Z.; Shi, J.; Wei, S.; Zhou, Y. A Phase Filtering Method with Scale Recurrent Networks for InSAR. Remote Sens. 2020, 12, 3453. [Google Scholar] [CrossRef]
- Sica, F.; Gobbi, G.; Rizzoli, P.; Bruzzone, L. Φ-Net: Deep Residual Learning for InSAR Parameters Estimation. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3917–3941. [Google Scholar] [CrossRef]
- Kang, J.; Hong, D.; Liu, J.; Baier, G.; Yokoya, N.; Demir, B. Learning Convolutional Sparse Coding on Complex Domain for Interferometric Phase Restoration. IEEE Tran. Neural Netw. Learn. Syst. 2021, 32, 826–840. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ojha, C.; Fusco, A.; Pintp, I.M. Interferometric SAR phase denoising using proximity-based K-SVD technique. Sensors 2019, 19, 2684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, X.; Wang, X.; Wang, Y.; Zhu, S. Efficient InSAR Phase Noise Reduction via Compressive Sensing in the Complex Domain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1615–1632. [Google Scholar] [CrossRef]
- Monga, V.; Li, Y.L.; Eldar, Y.C. Algorithm Unrolling: Interpretable, Efficient Deep Learning for Signal and Image Processing. IEEE Signal Process. Mag. 2021, 38, 18–44. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Ibtehaz, N.; Rahman, M.S. MultiResUNet: Rethinking the U-Net Architecture for Multimodal Biomedical Image Segmentation. Neural Netw. 2019, 121, 74–87. [Google Scholar] [CrossRef] [PubMed]
- Gregor, K.; LeCun, Y. Learning Fast Approximations of Sparse Coding. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Madison, WI, USA, 21–24 June 2010. [Google Scholar]
- Zhang, J.; Ghanem, B. ISTA-Net: Interpretable Optimization-Inspired Deep Network for Image Compressive Sensing. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 1828–1837. [Google Scholar]
- Jin, K.H.; McCann, M.T.; Froustey, E.; Unser, M. Deep Convolutional Neural Network for Inverse Problems in Imaging. IEEE Trans. Image Process. 2017, 26, 4509–4522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.; Pock, T. Trainable Nonlinear Reaction Diffusion: A Flexible Framework for Fast and Effective Image Restoration. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1256–1272. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Sun, J.; Li, H.B.; Xu, Z.B. ADMM-CSNet: A Deep Learning Approach for Image Compressive Sensing. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 521–538. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Vis. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Xu, J.R.; Lin, S.; Wei, F.Y.; Hu, H. GCNet: Non-local Networks Meet Squeeze-Excitation Networks and Beyond. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 1971–1980. [Google Scholar]
- Lopez-Martinez, C.; Fabregas, X. Modeling and reduction of SAR interferometric phase noise in the wavelet domain. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2553–2566. [Google Scholar] [CrossRef] [Green Version]
- Pu, L.; Zhang, X.; Zhou, L.; Li, L.; Shi, J.; Wei, S. Nonlocal Feature Selection Encoder–Decoder Network for Accurate InSAR Phase Filtering. Remote Sens. 2022, 14, 1174. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y. Deep Convolutional Neural Network-Based Robust Phase Gradient Estimation for Two-Dimensional Phase Unwrapping Using SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4653–4665. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Pu, L.; Zhang, X.; Zhou, Z.; Li, L.; Zhou, L.; Shi, J.; Wei, S. A Robust InSAR Phase Unwrapping Method via Phase Gradient Estimation Network. Remote Sens. 2021, 13, 4564. [Google Scholar] [CrossRef]
- Yu, Q.; Yang, X.; Fu, S.; Liu, X.; Sun, X. An adaptive contoured window filter for interferometric synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2007, 4, 23–26. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Milanfar, P. Automatic Parameter Selection for Denoising Algorithms Using a No-Reference Measure of Image Content. IEEE Trans. Image Process. 2010, 19, 3116–3132. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | MSE (Rad2) | NOR | MSSIM | T (s) |
|---|---|---|---|---|
| Lee [18] | 1.62 | 293.48 | 0.36 | 4.39 |
| Goldstein [26] | 1.24 | 91.12 | 0.50 | 5.41 |
| InSAR-BM3D [28] | 0.63 | 0 | 0.74 | 6.97 |
| ISTA [43] | 1.13 | 185.34 | 0.51 | 9.73 |
| Phi-Net [31] | 0.66 | 0 | 0.74 | 0.86 |
| PFNet [30] | 0.54 | 0 | 0.79 | 0.76 |
| SMD-Net (Ours) | 0.50 | 0 | 0.81 | 0.11 |
| Methods | NOR | Metric Q | T (s) |
|---|---|---|---|
| Lee [18] | 2506 | 30.86 | 16.70 |
| Goldstein [26] | 1404 | 48.73 | 22.00 |
| InSAR-BM3D [28] | 66 | 71.38 | 31.26 |
| ISTA [43] | 12 | 54.21 | 81.67 |
| Phi-Net [31] | 2 | 82.30 | 11.90 |
| PFNet [30] | 0 | 83.87 | 2.97 |
| SMD-Net (Ours) | 6 | 90.43 | 1.43 |
| Methods | NOR | Metric Q | T (s) |
|---|---|---|---|
| Lee [18] | 5980 | 25.67 | 18.36 |
| Goldstein [26] | 4430 | 44.55 | 22.97 |
| InSAR-BM3D [28] | 444 | 65.82 | 29.45 |
| ISTA [43] | 203 | 41.08 | 82.85 |
| Phi-Net [31] | 70 | 63.96 | 6.79 |
| PFNet [30] | 10 | 74.10 | 2.87 |
| SMD-Net (Ours) | 81 | 88.76 | 1.77 |
| Method | Samples | MSE (Rad2) | NOR | MSSIM | T (s) |
|---|---|---|---|---|---|
| PFNet [30] | 2250 | 0.54 | 0 | 0.79 | 0.76 |
| SMD-Net (Ours) | 200 | 0.59 | 0 | 0.79 | 0.11 |
| Methods | Samples | NOR | Metric Q | T (s) |
|---|---|---|---|---|
| PFNet [30] | 2250 | 0 | 83.87 | 2.97 |
| SMD-Net (Ours) | 200 | 14 | 88.60 | 1.52 |
| Methods | Samples | NOR | Metric Q | T (s) |
|---|---|---|---|---|
| PFNet [30] | 2250 | 10 | 74.10 | 2.87 |
| SMD-Net (Ours) | 200 | 126 | 86.78 | 1.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, N.; Zhang, X.; Zhang, T.; Pu, L.; Zhan, X.; Xu, X.; Hu, Y.; Shi, J.; Wei, S. A Sparse-Model-Driven Network for Efficient and High-Accuracy InSAR Phase Filtering. Remote Sens. 2022, 14, 2614. https://doi.org/10.3390/rs14112614
Wang N, Zhang X, Zhang T, Pu L, Zhan X, Xu X, Hu Y, Shi J, Wei S. A Sparse-Model-Driven Network for Efficient and High-Accuracy InSAR Phase Filtering. Remote Sensing. 2022; 14(11):2614. https://doi.org/10.3390/rs14112614
Chicago/Turabian StyleWang, Nan, Xiaoling Zhang, Tianwen Zhang, Liming Pu, Xu Zhan, Xiaowo Xu, Yunqiao Hu, Jun Shi, and Shunjun Wei. 2022. "A Sparse-Model-Driven Network for Efficient and High-Accuracy InSAR Phase Filtering" Remote Sensing 14, no. 11: 2614. https://doi.org/10.3390/rs14112614
APA StyleWang, N., Zhang, X., Zhang, T., Pu, L., Zhan, X., Xu, X., Hu, Y., Shi, J., & Wei, S. (2022). A Sparse-Model-Driven Network for Efficient and High-Accuracy InSAR Phase Filtering. Remote Sensing, 14(11), 2614. https://doi.org/10.3390/rs14112614