
SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems


Abstract
:1. Introduction
- simulate data to sufficient fidelity to directly support train/test/validation operations;
- augment existing real data (and/or synthetic data) to synthesise a larger training set;
- find alternative sources of data from which useful features can be inferred (e.g., transfer learning).
2. Existing Simulators
2.1. RaySAR
2.2. POFACETS
2.3. SARCASTIC v1.0
2.4. MOCEM
2.5. Xpatch
3. Methodology
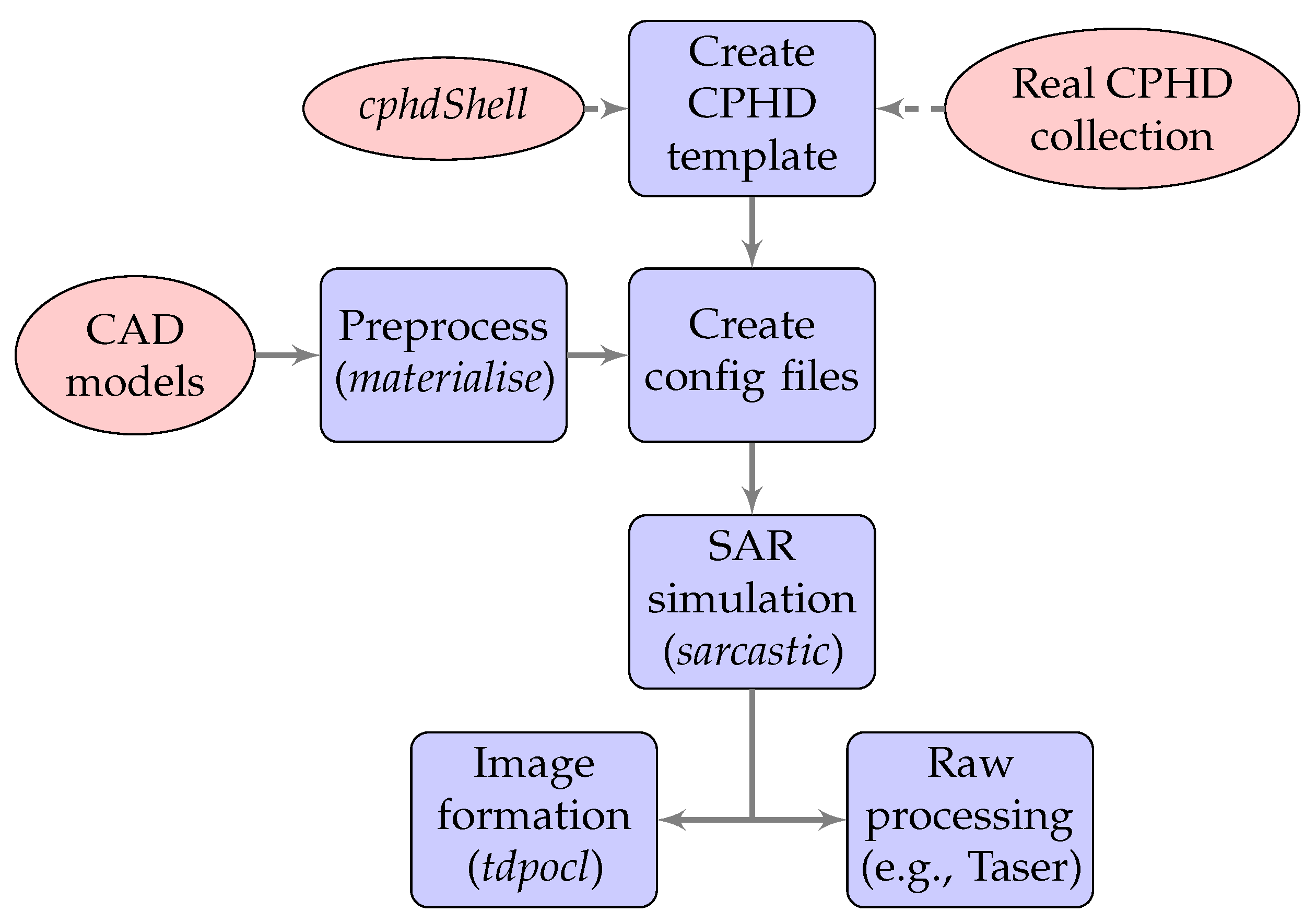
3.1. Framework Overview
- libraytracer—The core raytracing engine;
- sarcastic—The primary SAR simulator;
- bircs—A tool for calculating bistatic RCS values using the raytacing engine, primarily for calibration and regression testing;
- materialise—A tool to introduce surface variations to a CAD model to emulate the surface roughness of the material being modelled;
- SARTrace—A modified version of the SARCASTIC engine which allows the ray history to be enumerated;
- cphdShell—Generates template CPHD data files with zeroed phase history data which are subsequently populated by the SARCASTIC simulator;
- tdpocl—A GPU-accelerated image formation processor used to generate complex SAR images from CPHD data files;
- cphdInfo—Prints summaries of and extracts information from CPHD data files.
3.2. Scattering Model
- Shoot ray from grid into scene;
- If the ray does not hit a model face, record zero contribution and stop;
- Otherwise, shoot a shadow ray from to the receiver position;
- If the shadow ray intersects a model face, record zero contribution and stop;
- Otherwise, calculate and record the contribution using Equation (7).
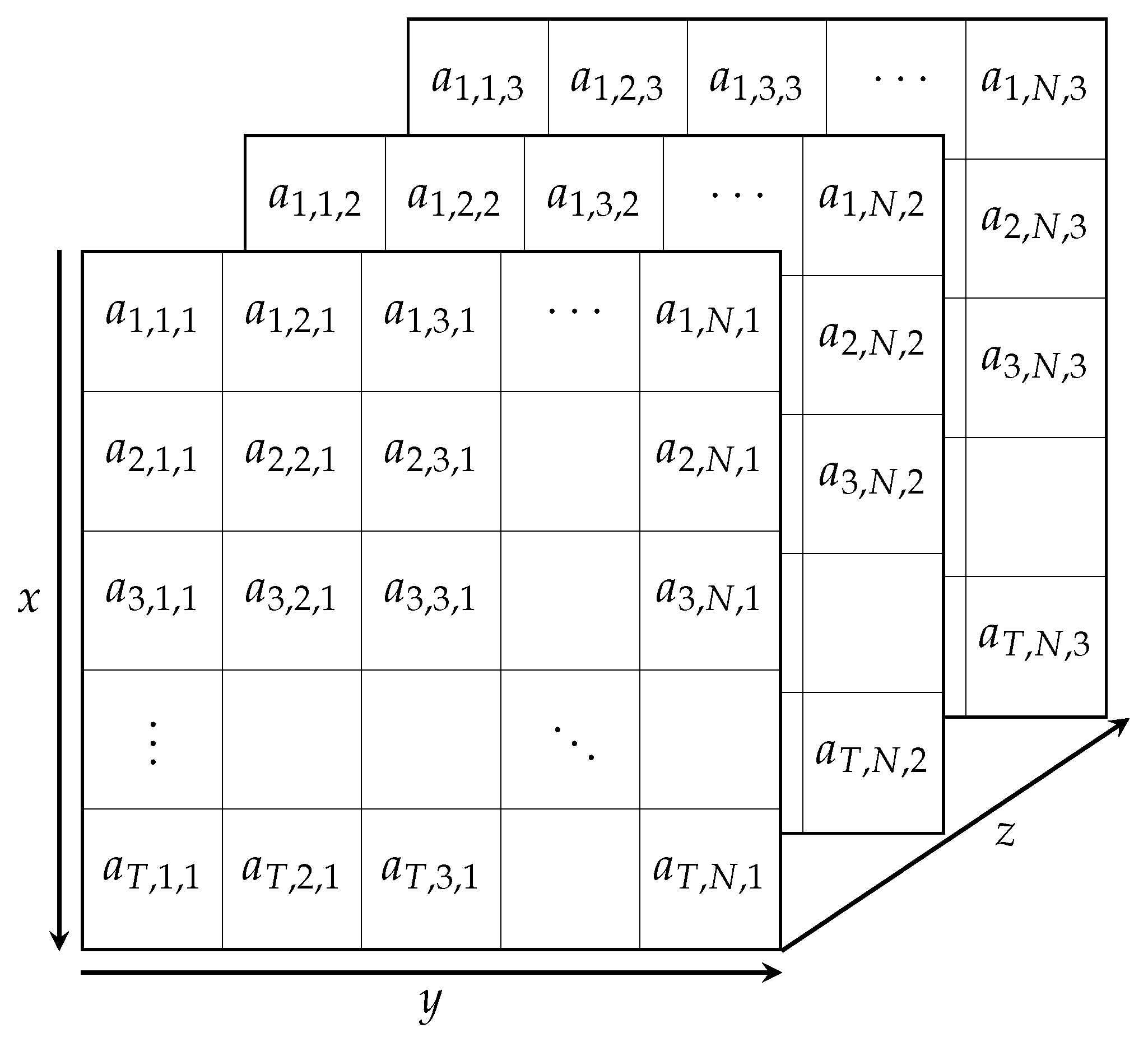
Interpreting the Intermediate Results Matrix
3.3. Data Formats
3.4. Building for High-Throughput Applications
- Any reduction in accuracy or fidelity of the result will be flagged to the user, and an option to disable the optimisation made available;
- Code will be written in such a manner that the acceleration scales with the number of available processors and availability of required resources (e.g., RAM, I/O bandwidth, etc.);
- Nvidia GPUs will be targeted specifically. A compute capability of ≥ will be assumed.
3.4.1. Preprocessing Steps
3.4.2. GPU Acceleration
4. Results
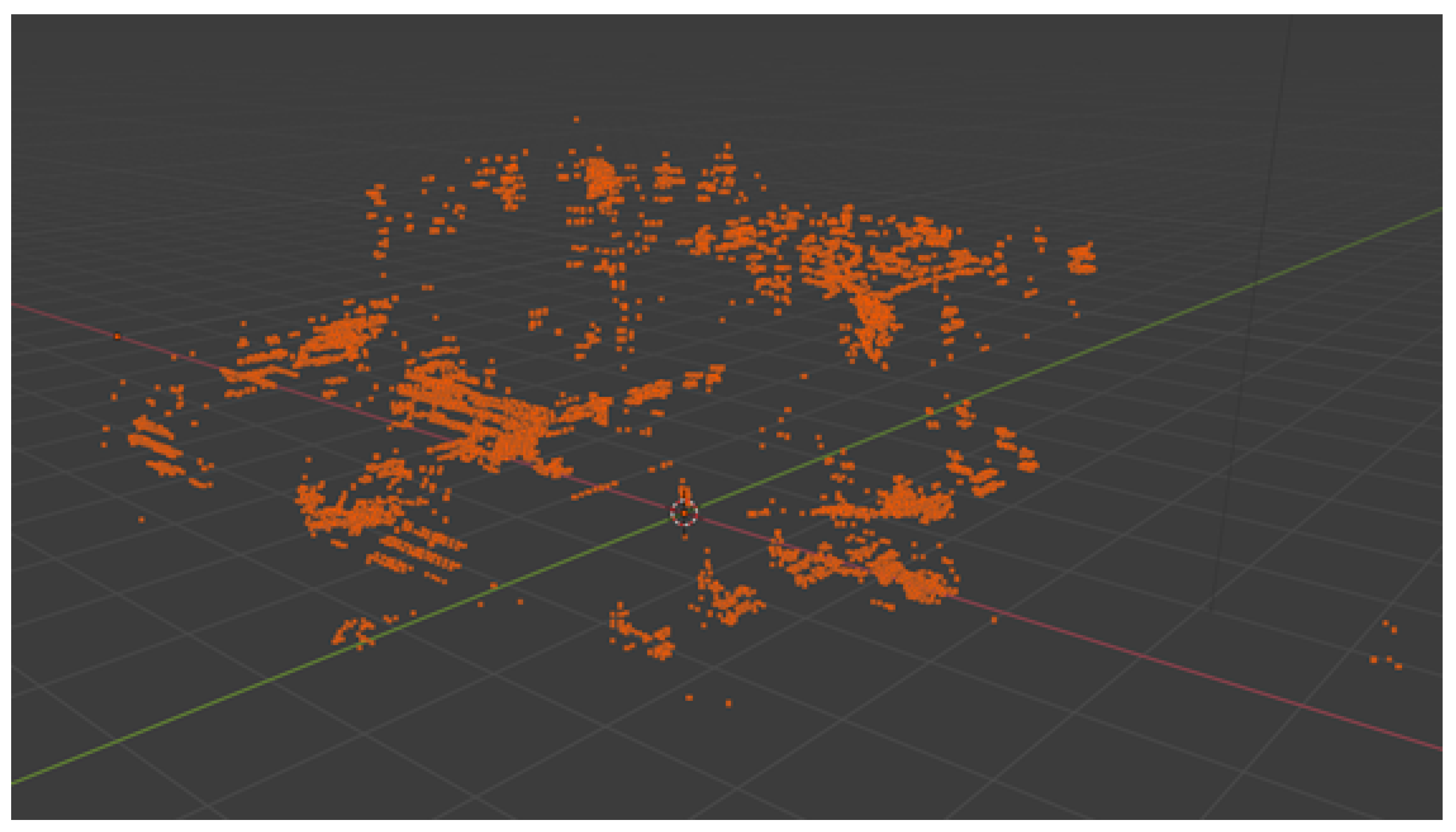
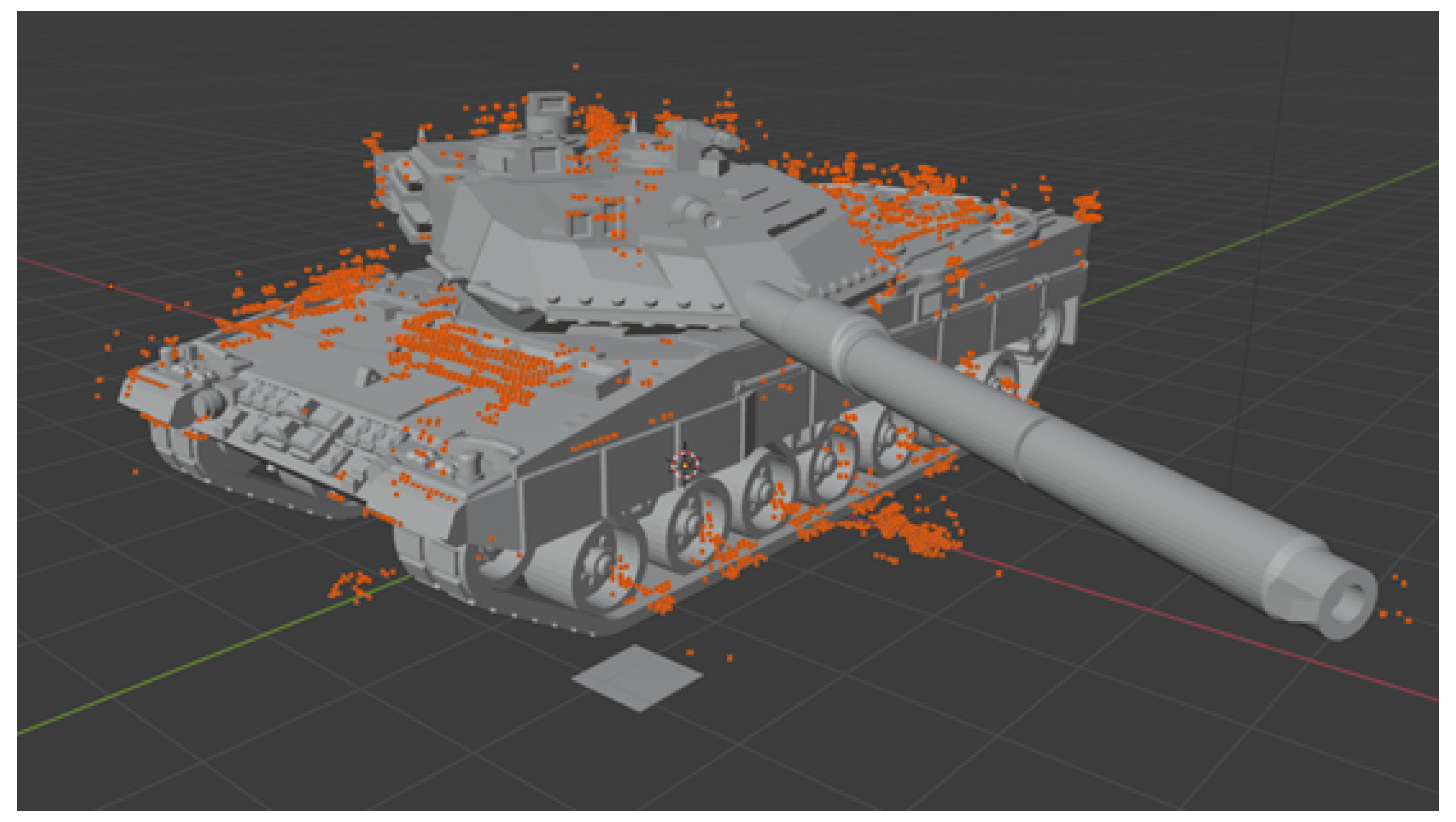
4.1. 3D Point Cloud Extraction
4.2. Scattering Investigations with SARTrace
4.3. Generating a Data Dome for Vehicular Targets
4.4. Runtime Performance Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ATR | Automatic target recognition |
| CPHD | Compensated phase history data |
| GPU | Graphics processing unit |
| HPC | High performance compute |
| HPCMO | High Performance Computing Modernization Office |
| HPCMP | High Performance Computing Modernization Program |
| MSTAR | Moving and Stationary Target Acquisition and Recognition |
| RCS | Radar cross section |
| SBR | Shooting and bouncing rays |
| SAR | Synthetic aperture radar |
References
- Sherwin, C.W.; Ruina, J.; Rawcliffe, R. Some early developments in synthetic aperture radar systems. IRE Trans. Mil. Electron. 1962, 1051, 111–115. [Google Scholar] [CrossRef]
- El-Arnauti, G.; Saalmann, O.; Brenner, A.R. Advanced System Concept and Experimental Results of the Ultra-High Resolution Airborne SAR Demonstrator PAMIR-Ka. In Proceedings of the EUSAR 2018, 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–5. [Google Scholar]
- Ignatenko, V.; Laurila, P.; Radius, A.; Lamentowski, L.; Antropov, O.; Muff, D. ICEYE Microsatellite SAR Constellation Status Update: Evaluation of first commercial imaging modes. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Virtual, 26 September–2 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 3581–3584. [Google Scholar]
- Ignatenko, V.; Nottingham, M.; Radius, A.; Lamentowski, L.; Muff, D. ICEYE Microsatellite SAR Constellation Status Update: Long Dwell Spotlight and Wide Swath Imaging Modes. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium, Virtual, 12–16 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1493–1496. [Google Scholar]
- The Air Force Moving and Stationary Target Recognition Database. Available online: https://www.sdms.afrl.af.mil/index.php?collection=mstar (accessed on 20 November 2021).
- Malmgren-Hansen, D.; Nobel-J⊘rgensen, M. Convolutional neural networks for SAR image segmentation. In Proceedings of the 2015 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Abu Dhabi, United Arab Emirates, 7–10 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 231–236. [Google Scholar]
- Stevens, M.; Jones, O.; Moyse, P.; Tu, S.; Wilshire, A. Bright Spark: Ka-band SAR technology demonstrator. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23–26 October 2017; IET: London, UK, 2017; pp. 1–4. [Google Scholar]
- Potin, P.; Rosich, B.; Grimont, P.; Miranda, N.; Shurmer, I.; O’Connell, A.; Torres, R.; Krassenburg, M. Sentinel-1 mission status. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; VDE: Frankfurt, Germany, 2016; pp. 59–64. [Google Scholar]
- Lewis, B.; DeGuchy, O.; Sebastian, J.; Kaminski, J. Realistic SAR data augmentation using machine learning techniques. In Algorithms for Synthetic Aperture Radar Imagery XXVI; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2019; Volume 10987, pp. 12–28. [Google Scholar]
- Inkawhich, N.; Inkawhich, M.J.; Davis, E.K.; Majumder, U.K.; Tripp, E.; Capraro, C.; Chen, Y. Bridging a Gap in SAR-ATR: Training on Fully Synthetic and Testing on Measured Data. IEEE J. Sel. Top. Appl. Earth Obs. Remot. Sens. 2021, 14, 2942–2955. [Google Scholar] [CrossRef]
- Lewis, B.; Scarnati, T.; Sudkamp, E.; Nehrbass, J.; Rosencrantz, S.; Zelnio, E. A SAR dataset for ATR development: The Synthetic and Measured Paired Labeled Experiment (SAMPLE). In Algorithms for Synthetic Aperture Radar Imagery XXVI; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 10987. [Google Scholar]
- degaard, N.; Knapskog, A.; Cochin, C.; Delahaye, B. Comparison of real and simulated SAR imagery of ships for use in ATR. In Algorithms for Synthetic Aperture Radar Imagery XVII; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7699. [Google Scholar]
- Auer, S.; Hinz, S.; Bamler, R. Ray-tracing simulation techniques for understanding high-resolution SAR images. IEEE Trans. Geosci. Remot. Sens. 2010, 48, 1445–1456. [Google Scholar] [CrossRef] [Green Version]
- Auer, S.; Bamler, R.; Reinartz, P. RaySAR-3D SAR simulator: Now open source. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 6730–6733. [Google Scholar]
- Woollard, M.; Bannon, A.; Ritchie, M.; Griffiths, H. Synthetic aperture radar automatic target classification processing concept. Electron. Lett. 2019, 55, 1301–1303. [Google Scholar] [CrossRef]
- Woollard, M.; Ritchie, M.; Griffiths, H. Investigating the effects of bistatic SAR phenomenology on feature extraction. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 906–911. [Google Scholar]
- Chatzigeorgiadis, F.; Jenn, D.C. A MATLAB physical-optics RCS prediction code. IEEE Antennas Propag. Mag. 2004, 46, 137–139. [Google Scholar]
- Chatzigeorgiadis, F. Development of Code for a Physical Optics Radar Cross Section Prediction and Analysis Application; Naval Postgraduate School: Monterey, CA, USA, 2004. [Google Scholar]
- Ludwig, A. Computation of radiation patterns involving numerical double integration. IEEE Trans. Antennas Propag. 1968, 16, 767–769. [Google Scholar] [CrossRef]
- Ludwig, A.C. Calculation of Scattered Patterns From Asymmetrical Reflectors; University of Southern California: Los Angeles, CA, USA, 1969. [Google Scholar]
- Moreira, F.J.; Prata, A. A self-checking predictor-corrector algorithm for efficient evaluation of reflector antenna radiation integrals. IEEE Trans. Antennas Propag. 1994, 42, 246–254. [Google Scholar] [CrossRef]
- Muff, D.G. Electromagnetic Ray-Tracing for the Investigation of Multipath and Vibration Signatures in Radar Imagery. Ph.D. Thesis, UCL (University College London), London, UK, 2018. [Google Scholar]
- Muff, D.G.; Andre, D.; Corbett, B.; Finnis, M.; Blacknell, D.; Nottingham, M.R.; Stevenson, C.; Griffiths, H. Comparison of vibration and multipath signatures from simulated and real SAR images. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23–26 October 2017. [Google Scholar]
- Cochin, C.; Pouliguen, P.; Delahaye, B.; le Hellard, D.; Gosselin, P.; Aubineau, F. MOCEM—An “all in one” tool to simulate SAR image. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; VDE: Frankfurt, Germany, 2008. [Google Scholar]
- Cochin, C.; Louvigne, J.C.; Fabbri, R.; Le Barbu, C.; Ferro-Famil, L.; Knapskog, A.O.; Odegaard, N. MOCEM V4 - Radar simulation of ship at sea for SAR and ISAR applications. In Proceedings of the EUSAR 2014: 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; VDE: Frankfurt, Germany, 2014; pp. 608–611. [Google Scholar]
- Knapskog, A.O.; Vignaud, L.; Cochin, C.; Odegaard, N. Target Recognition of Ships in Harbour Based on Simulated SAR Images Produced with MOCEM Software. In Proceedings of the EUSAR 2014: 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; VDE: Frankfurt, Germany, 2014; pp. 1188–1191. [Google Scholar]
- Vignaud, L.; Odegaard, N.; Ruggiero, H.; Cochin, C.; Louvigne, J.C.; Knapskog, A.O. Comparison of simulated and measured ISAR images flow of a ship at sea. In Proceedings of the EUSAR 2021: 13th European Conference on Synthetic Aperture Radar, Online, 29 March–1 April 2021; VDE: Frankfurt, Germany, 2021; pp. 52–55. [Google Scholar]
- Hazlett, M.; Andersh, D.J.; Lee, S.W.; Ling, H.; Yu, C. XPATCH: A high-frequency electromagnetic scattering prediction code using shooting and bouncing rays. In Targets and Backgrounds: Characterization and Representation; International Society for Optics and Photonics: Bellingham, WA, USA, 1995; Volume 2469, pp. 266–275. [Google Scholar]
- Andersh, D.; Moore, J.; Kosanovich, S.; Kapp, D.; Bhalla, R.; Kipp, R.; Courtney, T.; Nolan, A.; German, F.; Cook, J.; et al. Xpatch 4: The next generation in high frequency electromagnetic modeling and simulation software. In Proceedings of the Record of the IEEE 2000 International Radar Conference [Cat. No. 00CH37037], Alexandria, VA, USA, 12 May 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 844–849. [Google Scholar]
- Dungan, K.E.; Austin, C.; Nehrbass, J.; Potter, L.C. Civilian vehicle radar data domes. In Algorithms for Synthetic Aperture Radar Imagery XVII; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7699. [Google Scholar]
- Franceschetti, G.; Migliaccio, M.; Riccio, D. The SAR simulation: An overview. In Proceedings of the 1995 International Geoscience and Remote Sensing Symposium, Quantitative Remote Sensing for Science and Applications, Firenze, Italy, 10–14 July 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 3, pp. 2283–2285. [Google Scholar]
- Johnston, R.H.; Schwartzkopf, W.C. Compensated PhD—A Sensor-Independent Product for Sar PhD. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 4519–4522. [Google Scholar]
- Knott, E.F.; Schaeffer, J.F.; Tulley, M.T. Radar Cross Section; SciTech Publishing: Raleigh, NC, USA, 2004. [Google Scholar]
- Schwartzkopf, W.; Cox, T.; Koehler, F.; Fiedler, R. Generic Processing of SAR Complex Data Using the SICD Standard in Matlab. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 4438–4440. [Google Scholar]
- Carande, R.E.; Cohen, D. SAR Point Cloud Generation System. U.S. Patent 9,417,323B2, 16 August 2016. [Google Scholar]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remot. Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Gorham, L.; Naidu, K.D.; Majumder, U.; Minardi, M.A. Backhoe 3D “gold standard” image. In Algorithms for Synthetic Aperture Radar Imagery XII; International Society for Optics and Photonics: Bellingham, WA, USA, 2005; Volume 5808, pp. 64–71. [Google Scholar]
- Mitzner, K. Incremental Length Diffraction Coefficients; Technical Report; Northrop Corp. Aircraft Div.: Hawthorne, CA, USA, 1974. [Google Scholar]
- Smit, J.C. SigmaHat: A toolkit for RCS signature studies of electrically large complex objects. In Proceedings of the 2015 IEEE Radar Conference, Arlington, VA, USA, 10–15 May 2015; pp. 446–451. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation | Units |
|---|---|---|
| Radar cross section | ||
| Incident unit vector | - | |
| Scattered unit vector | - | |
| Plate normal unit vector | - | |
| Receiver E-plane unit vector | - | |
| Transmitter H-plane unit vector | - | |
| k | Wavenumber | |
| Reference range | ||
| L | Plate length | |
| W | Plate width | |
| x | Ray-grid length index | - |
| y | Ray-grid width index | - |
| z | Ray-grid bounce index | - |
| Symbol | Explanation | Units |
|---|---|---|
| Ray origin | ||
| Ray propagation vector | - | |
| Ray H-plane vector | - | |
| Complex amplitude of ray | - | |
| RCS contribution seen at receiver | ||
| Distance travelled by ray |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woollard, M.; Blacknell, D.; Griffiths, H.; Ritchie, M.A. SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems. Remote Sens. 2022, 14, 2561. https://doi.org/10.3390/rs14112561
Woollard M, Blacknell D, Griffiths H, Ritchie MA. SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems. Remote Sensing. 2022; 14(11):2561. https://doi.org/10.3390/rs14112561
Chicago/Turabian StyleWoollard, Michael, David Blacknell, Hugh Griffiths, and Matthew A. Ritchie. 2022. "SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems" Remote Sensing 14, no. 11: 2561. https://doi.org/10.3390/rs14112561
APA StyleWoollard, M., Blacknell, D., Griffiths, H., & Ritchie, M. A. (2022). SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems. Remote Sensing, 14(11), 2561. https://doi.org/10.3390/rs14112561