
A Machine Learning Approach to Extract Rock Mass Discontinuity Orientation and Spacing, from Laser Scanner Point Clouds

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:
1. Introduction
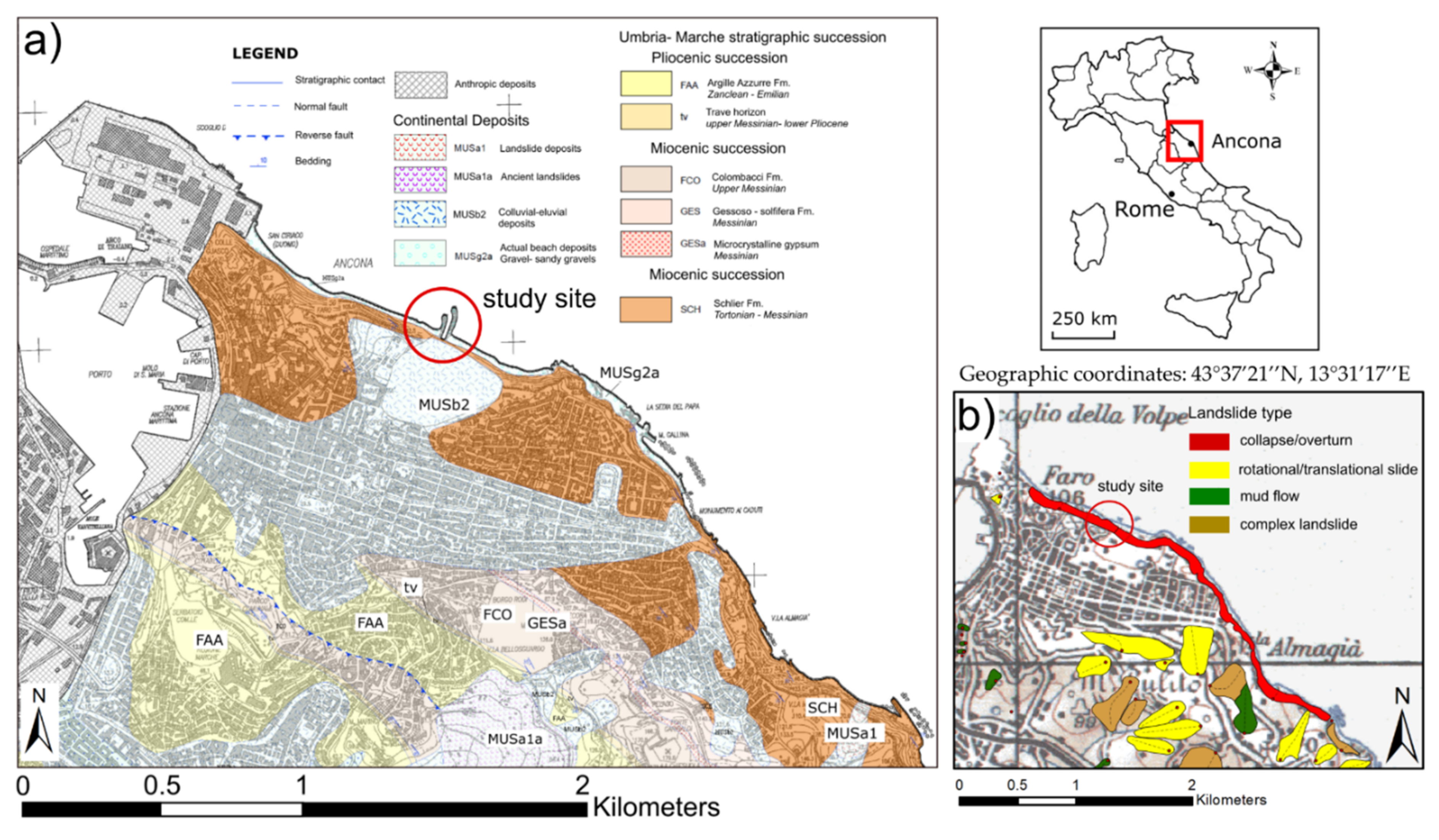
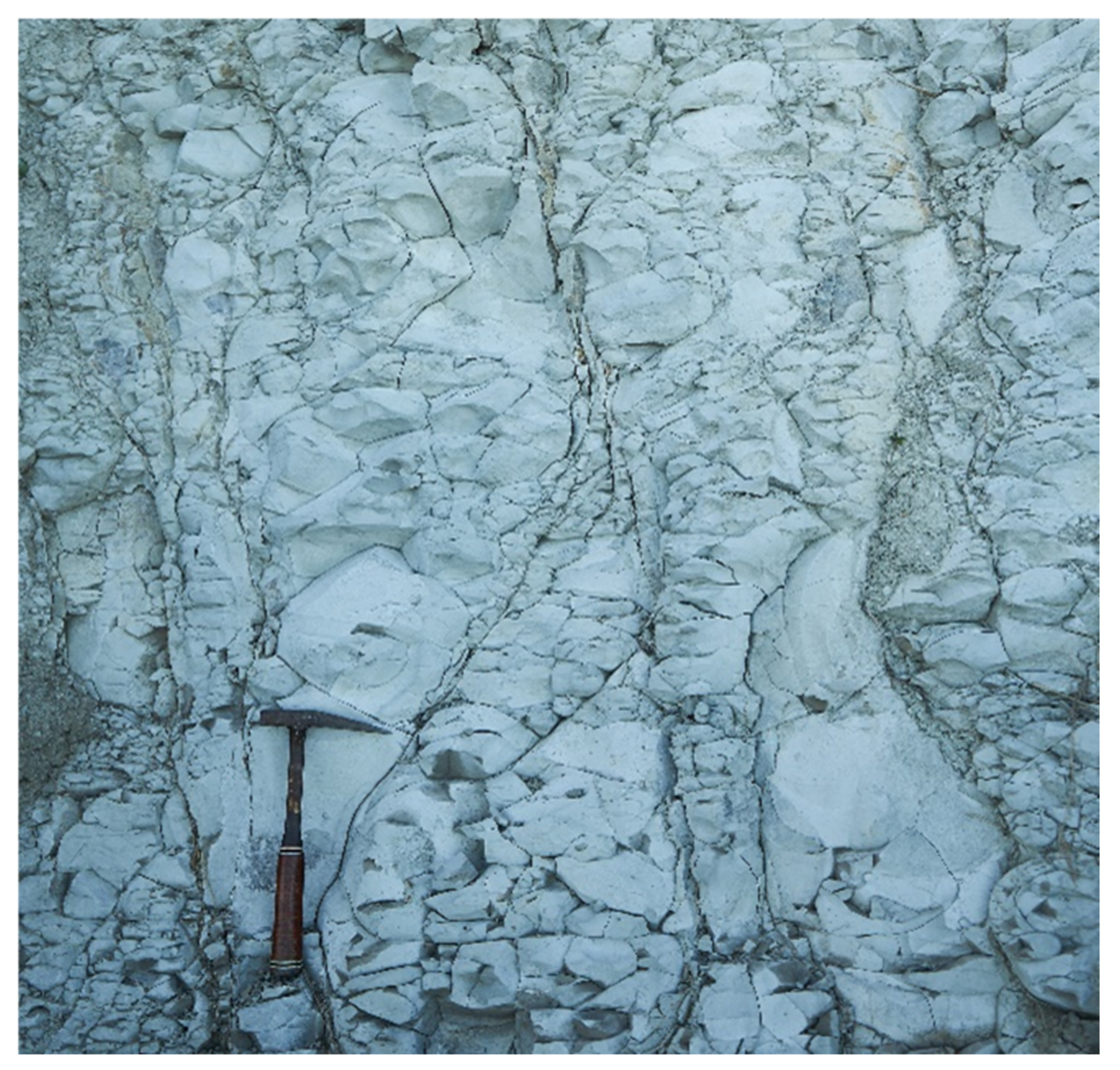
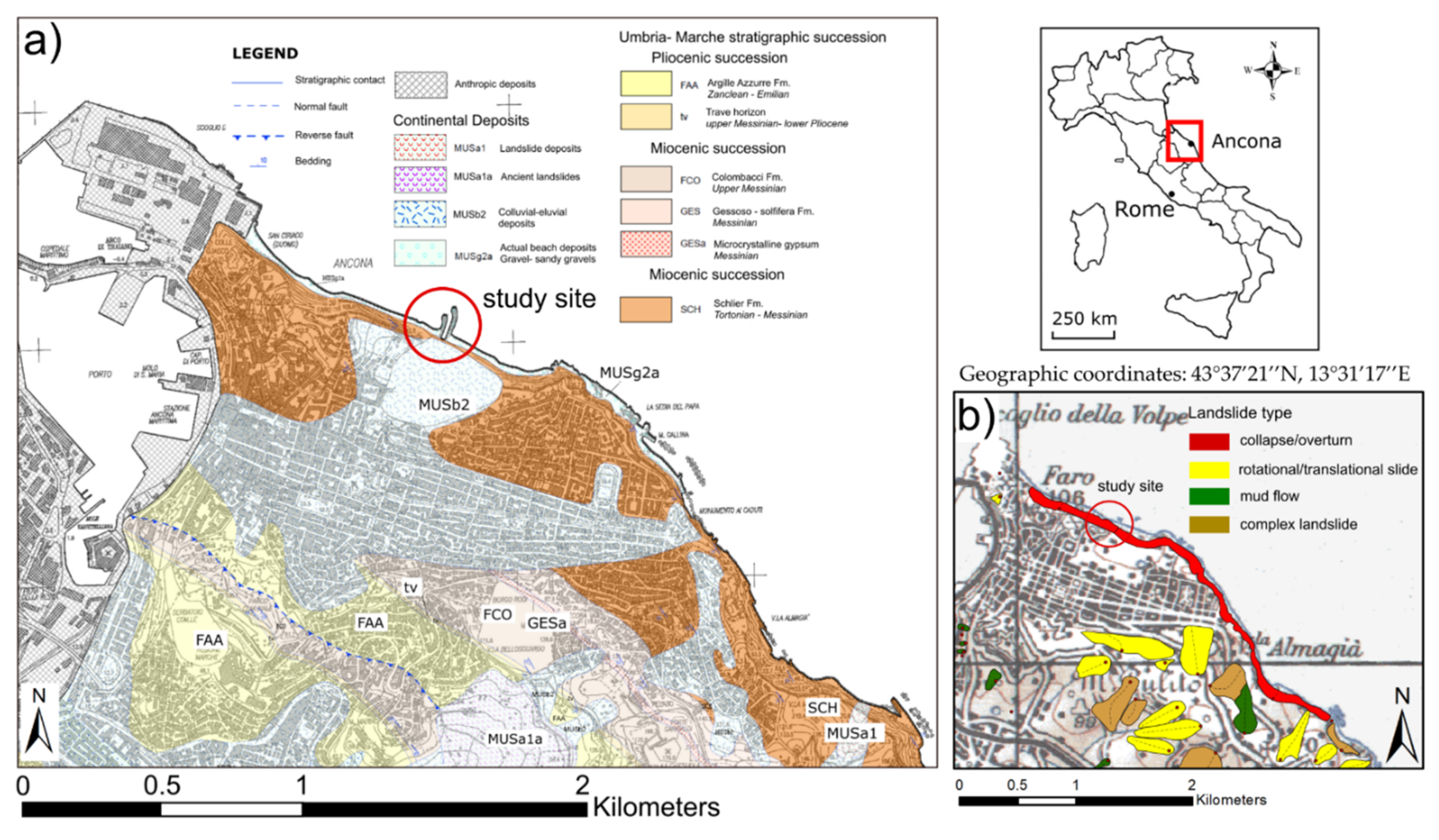
2. Geological Framework of the Area
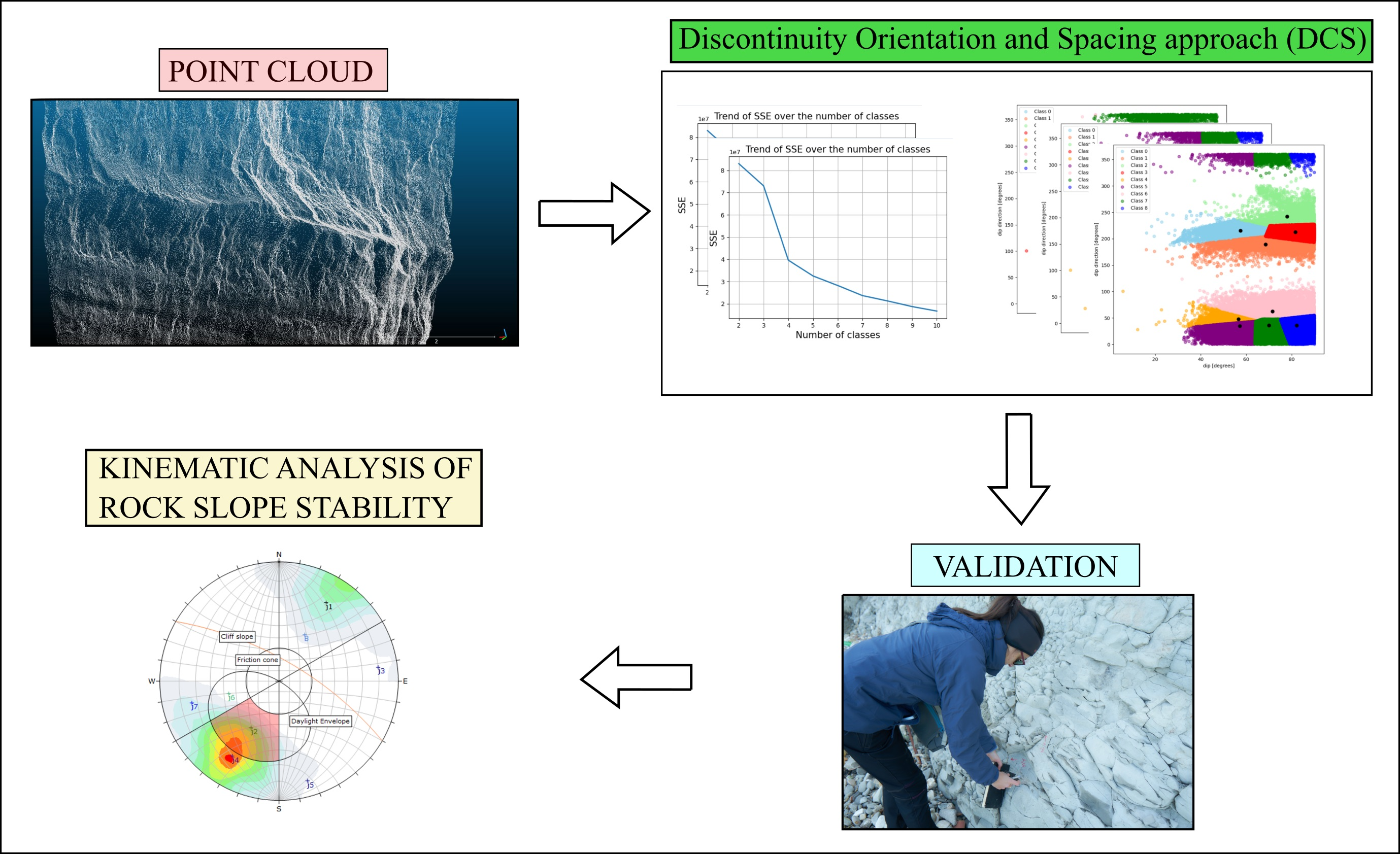
3. Methodology
3.1. Traditional Geomechanical Survey
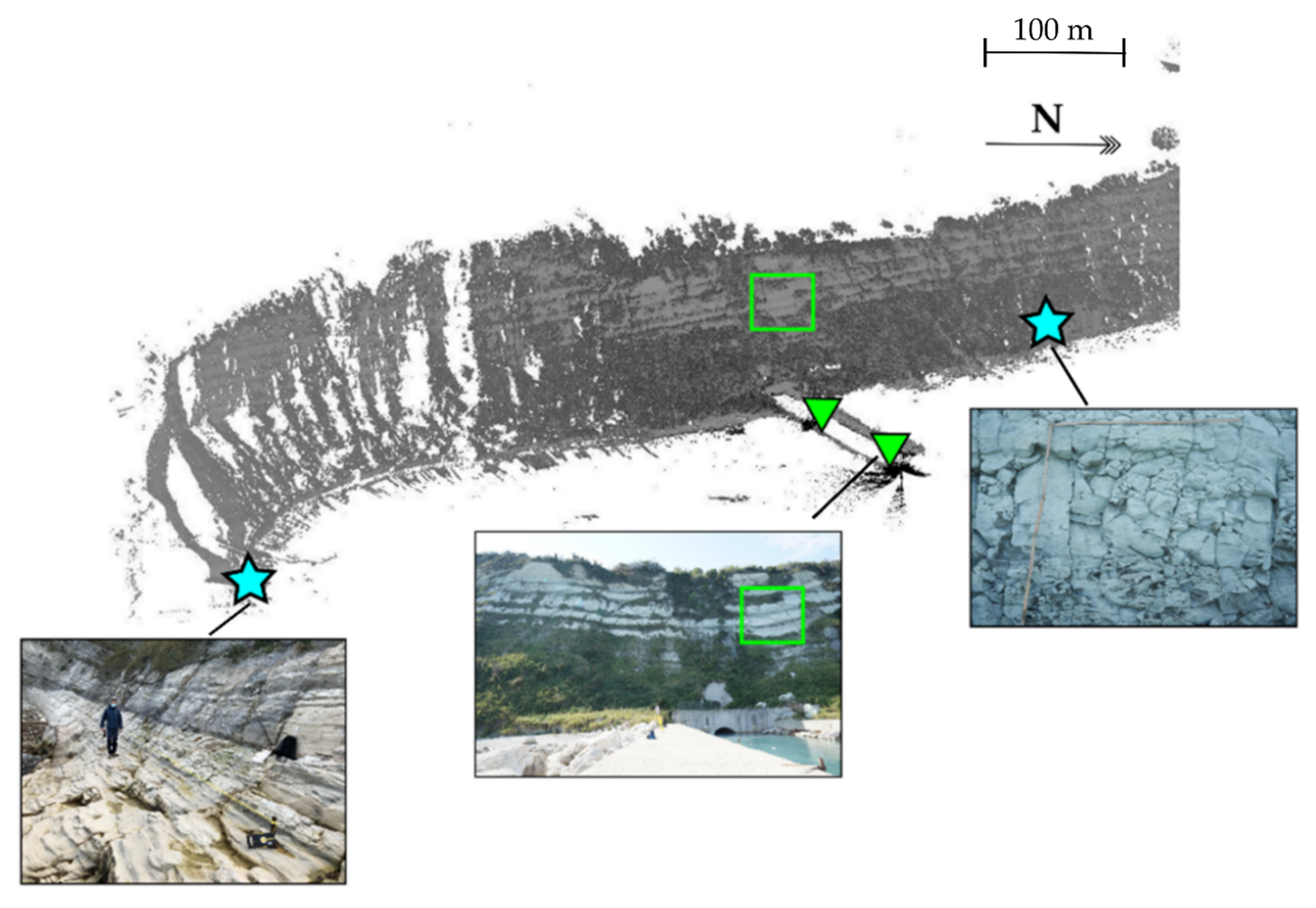
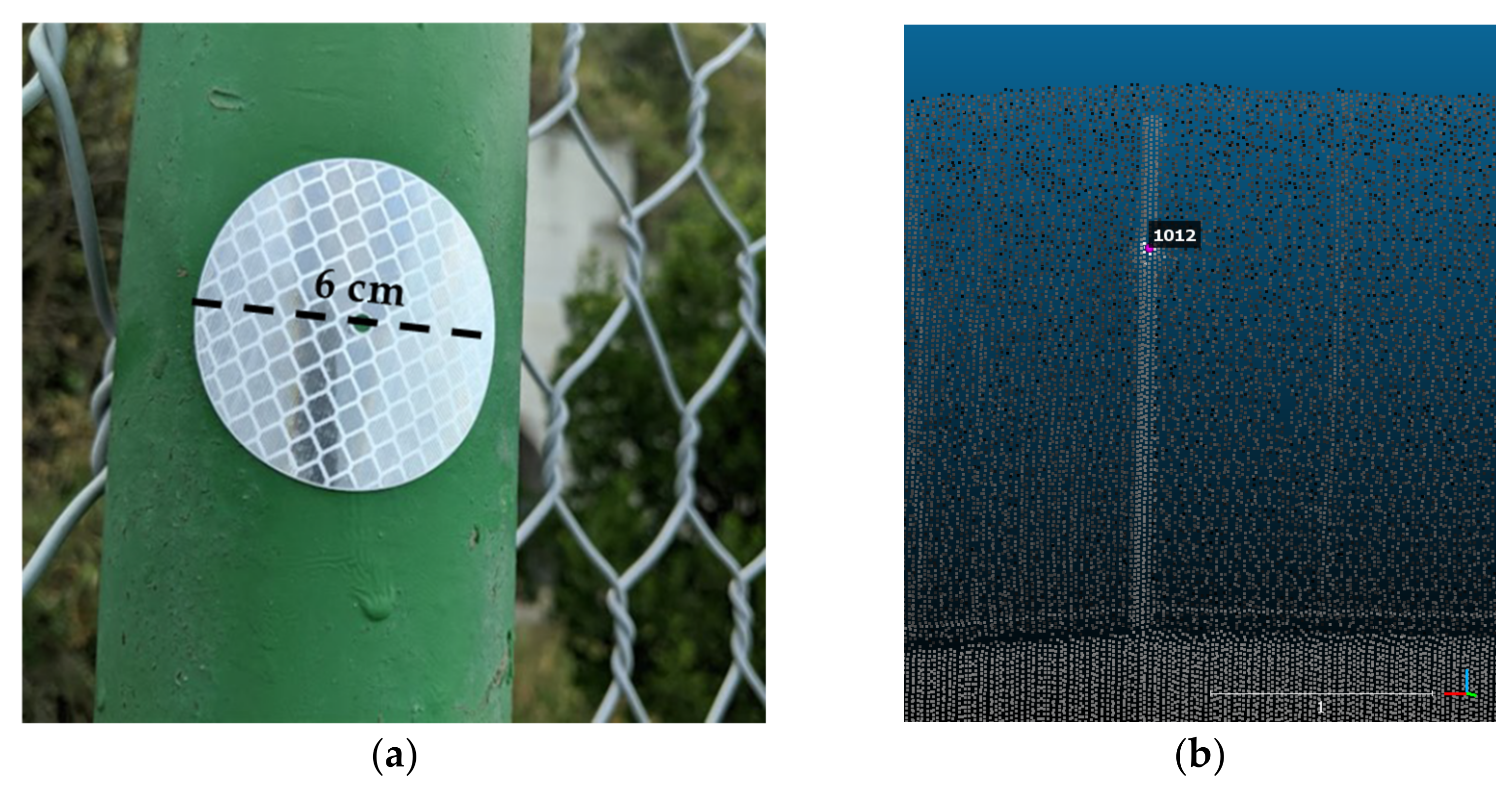
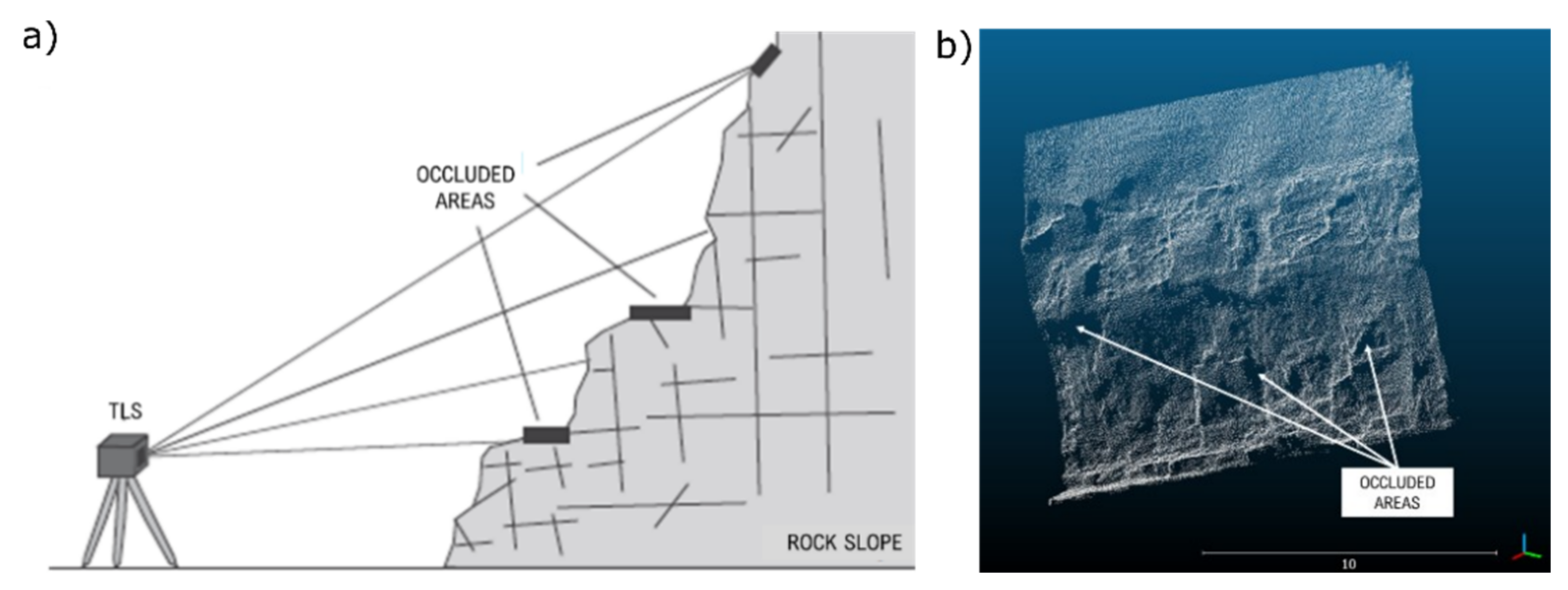
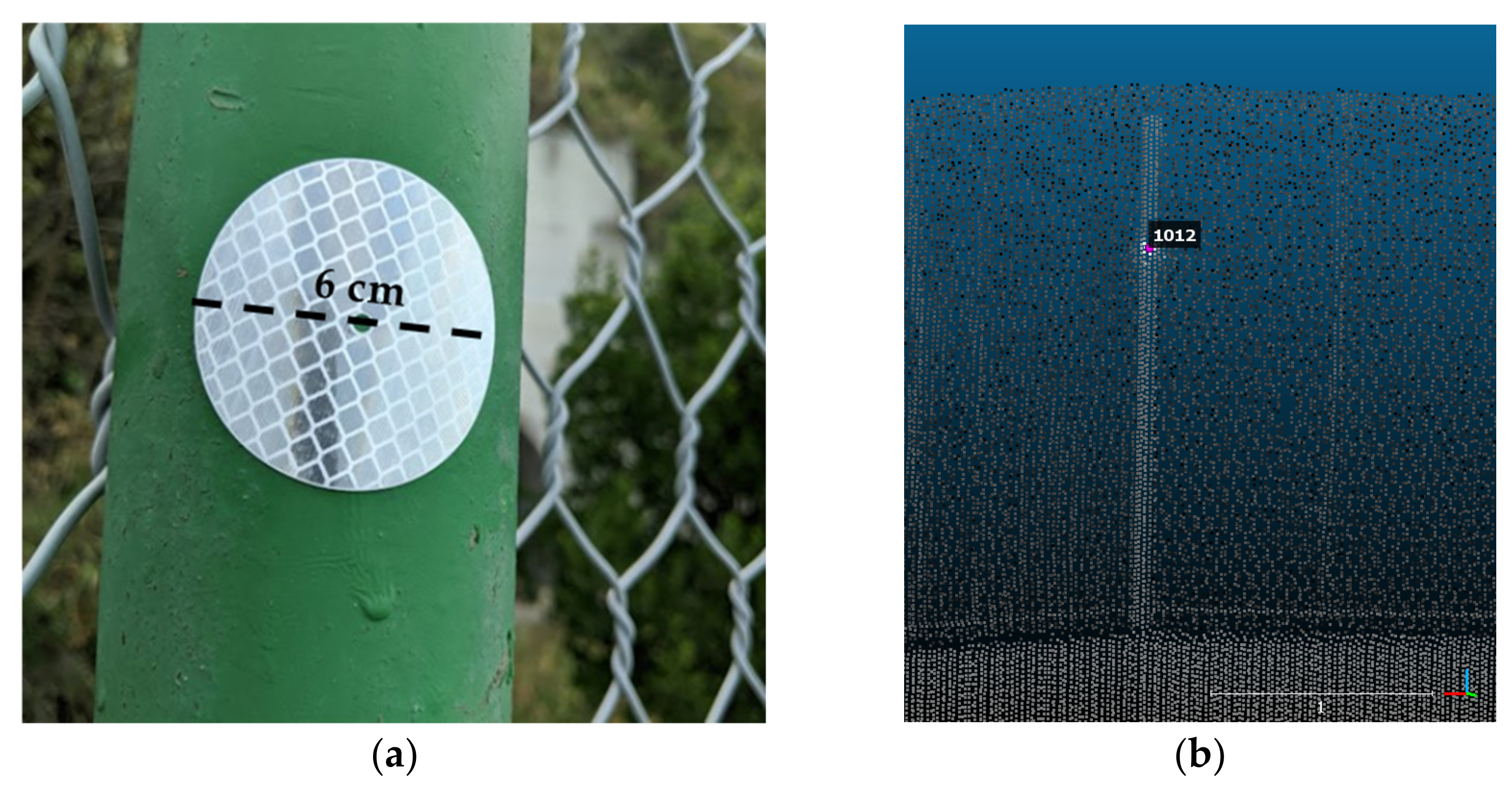
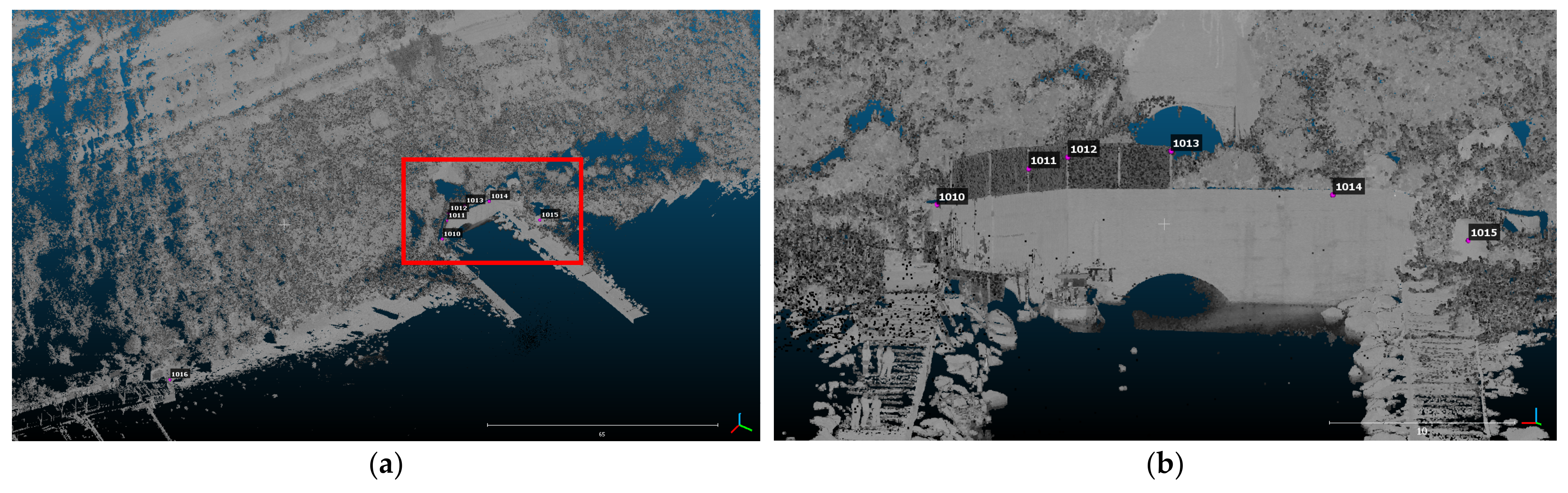
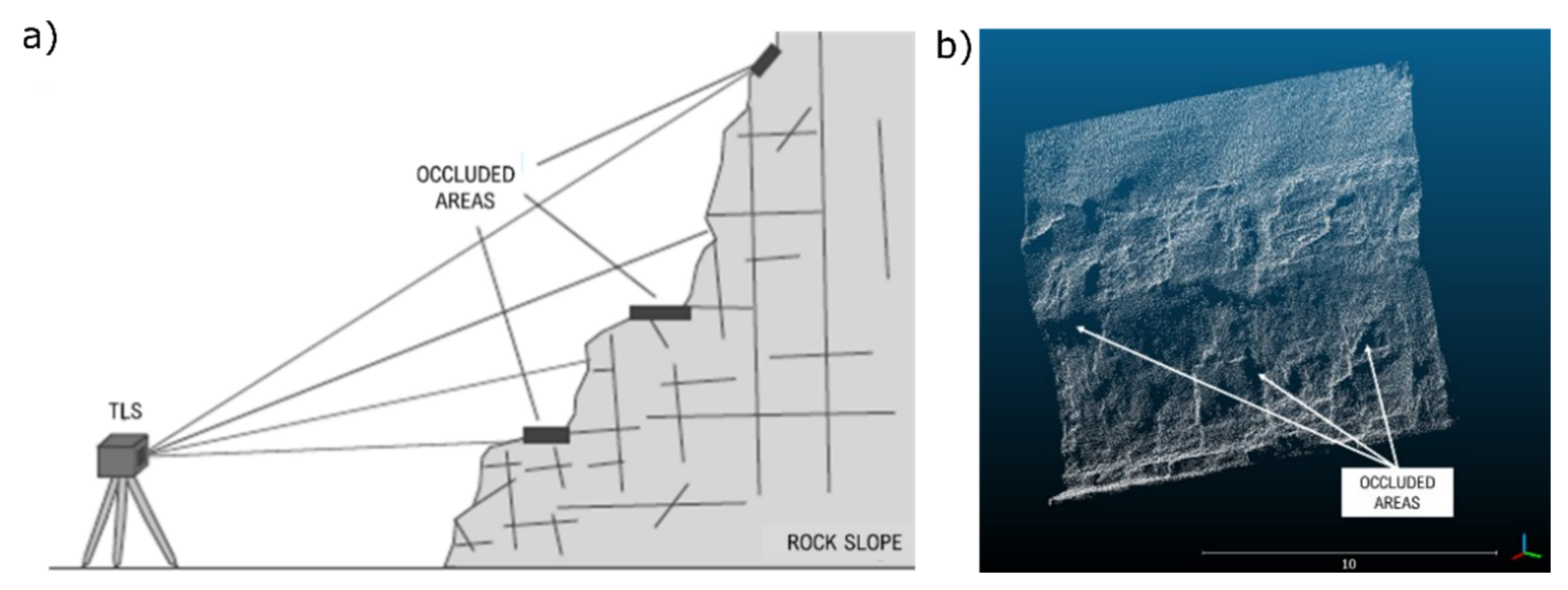
3.2. Terrestrial Laser Scanner Data Acquisition
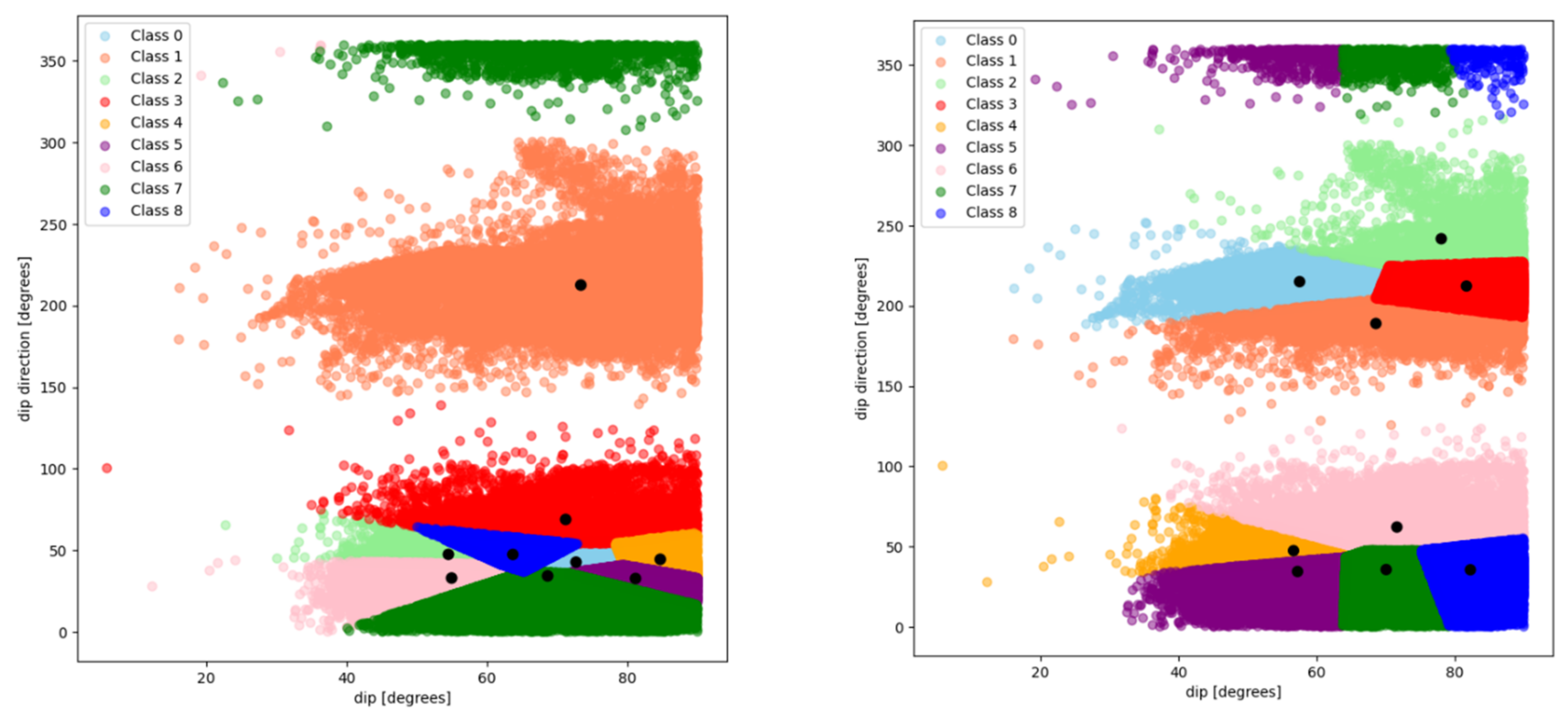
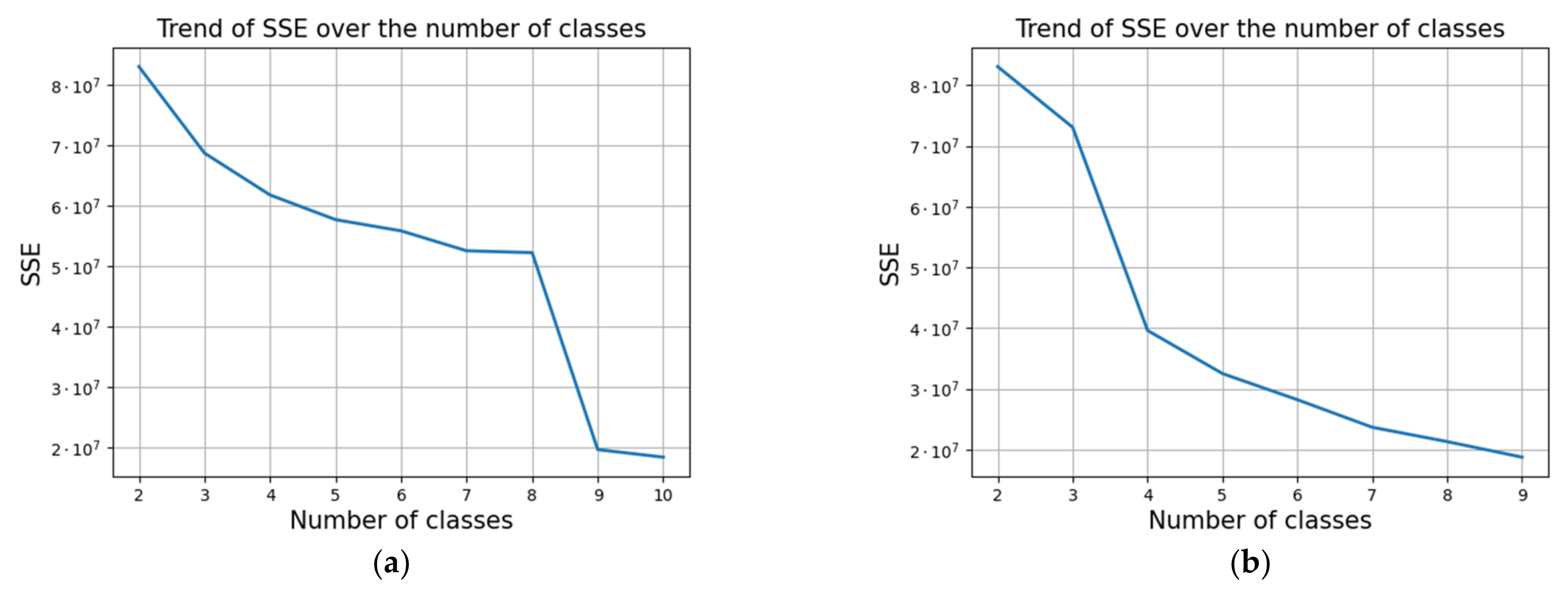
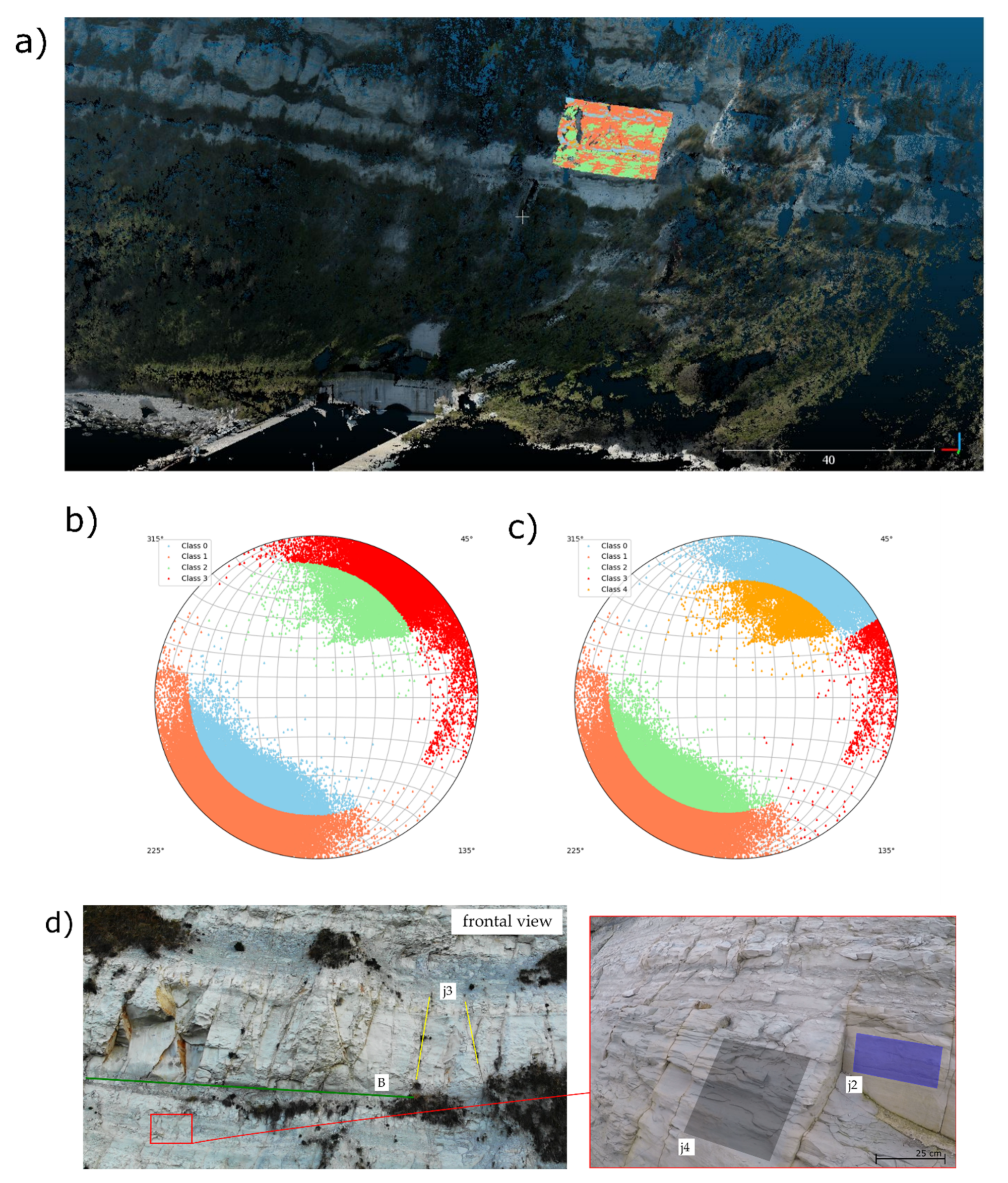
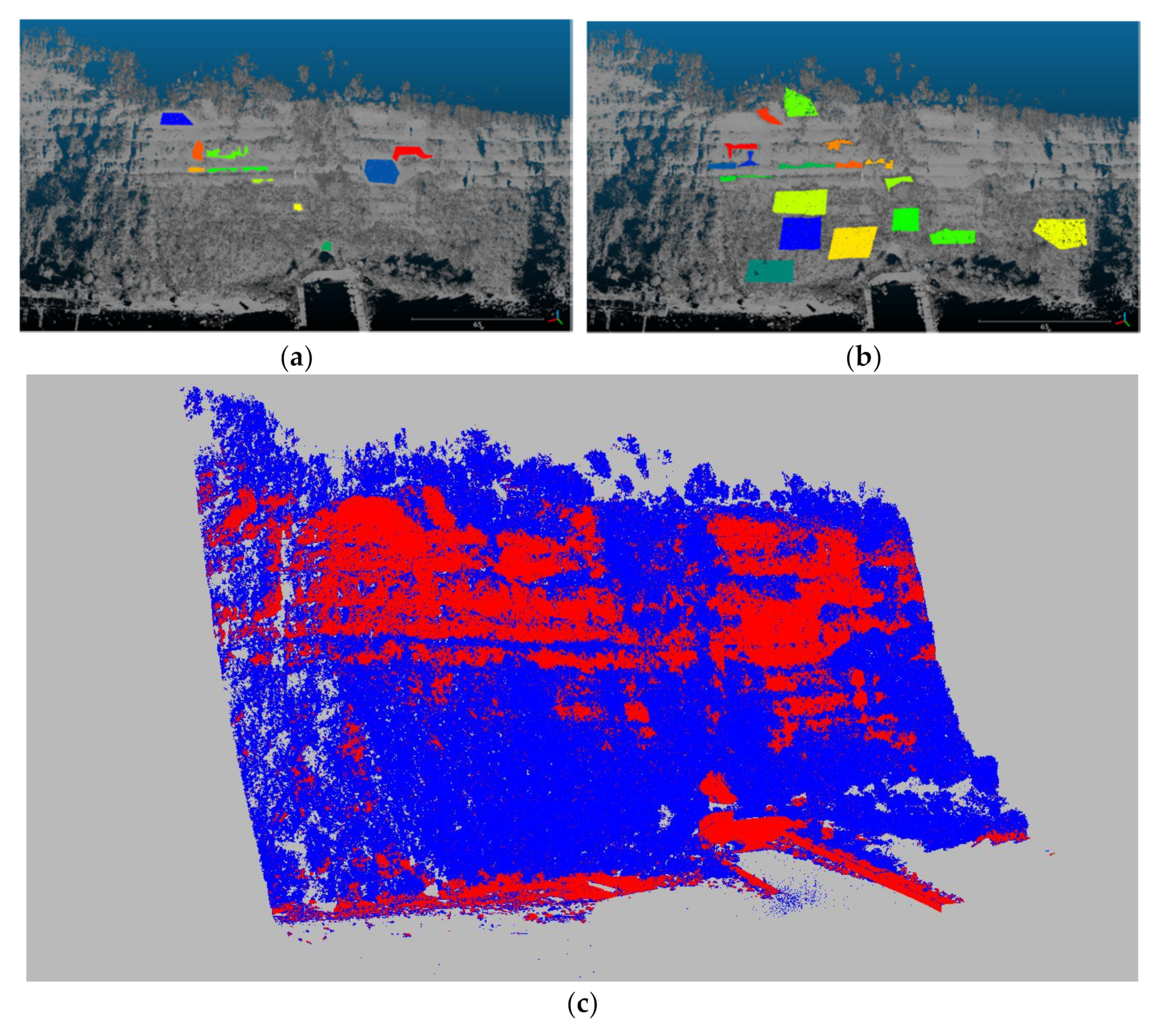
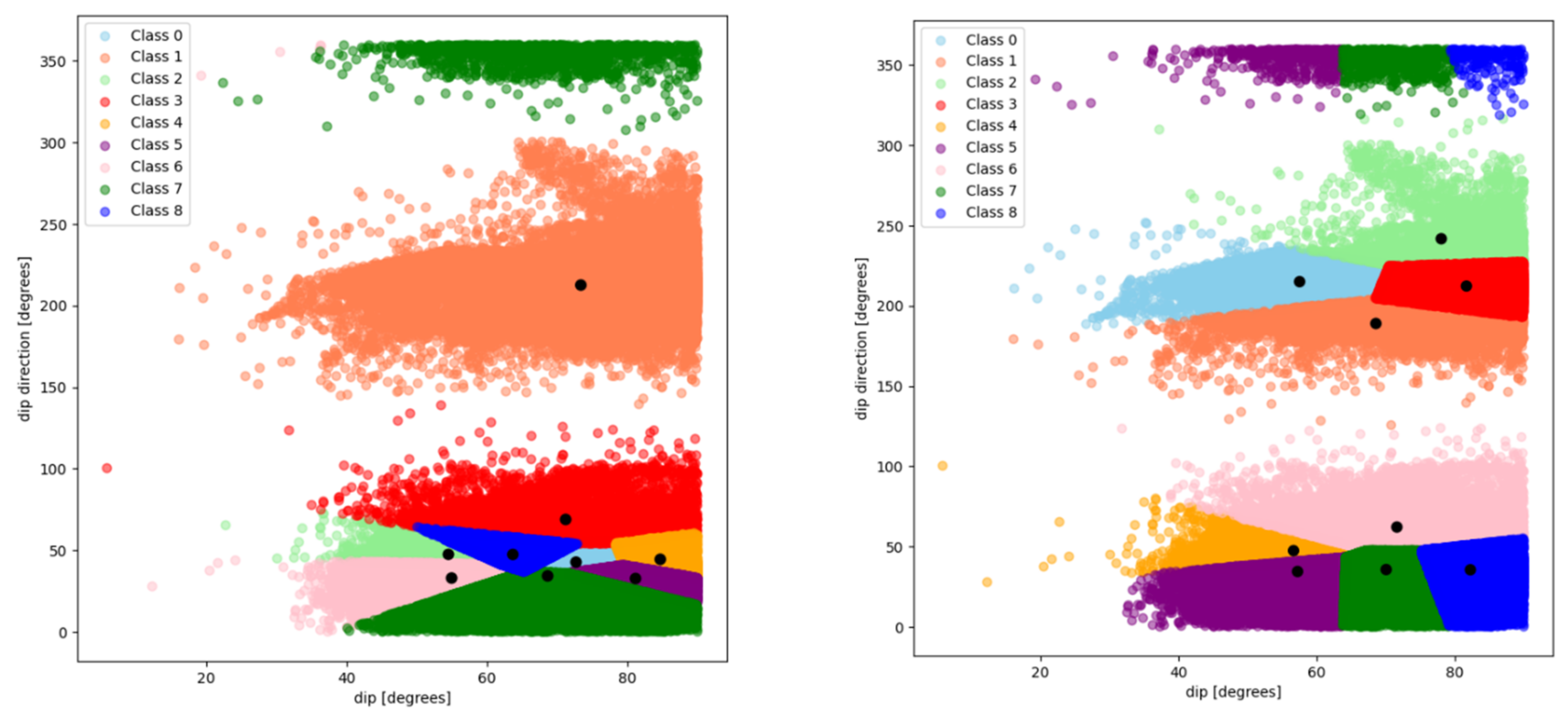
3.3. Extraction of Discontinuity Orientation and Their Classification in Clusters
3.4. Spacing Calculation
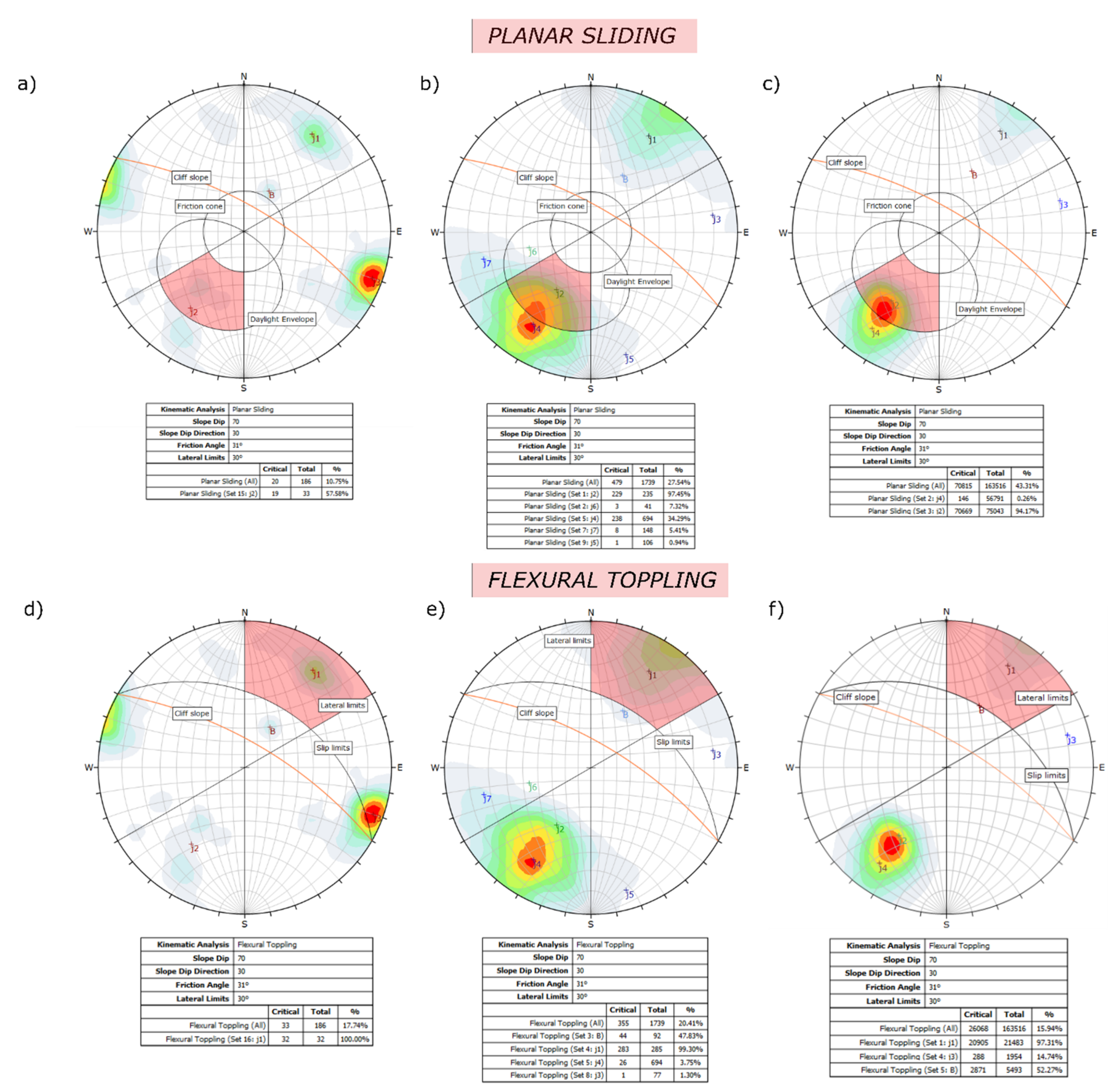
3.5. Kinematic Analysis of Slope Failure
4. Results
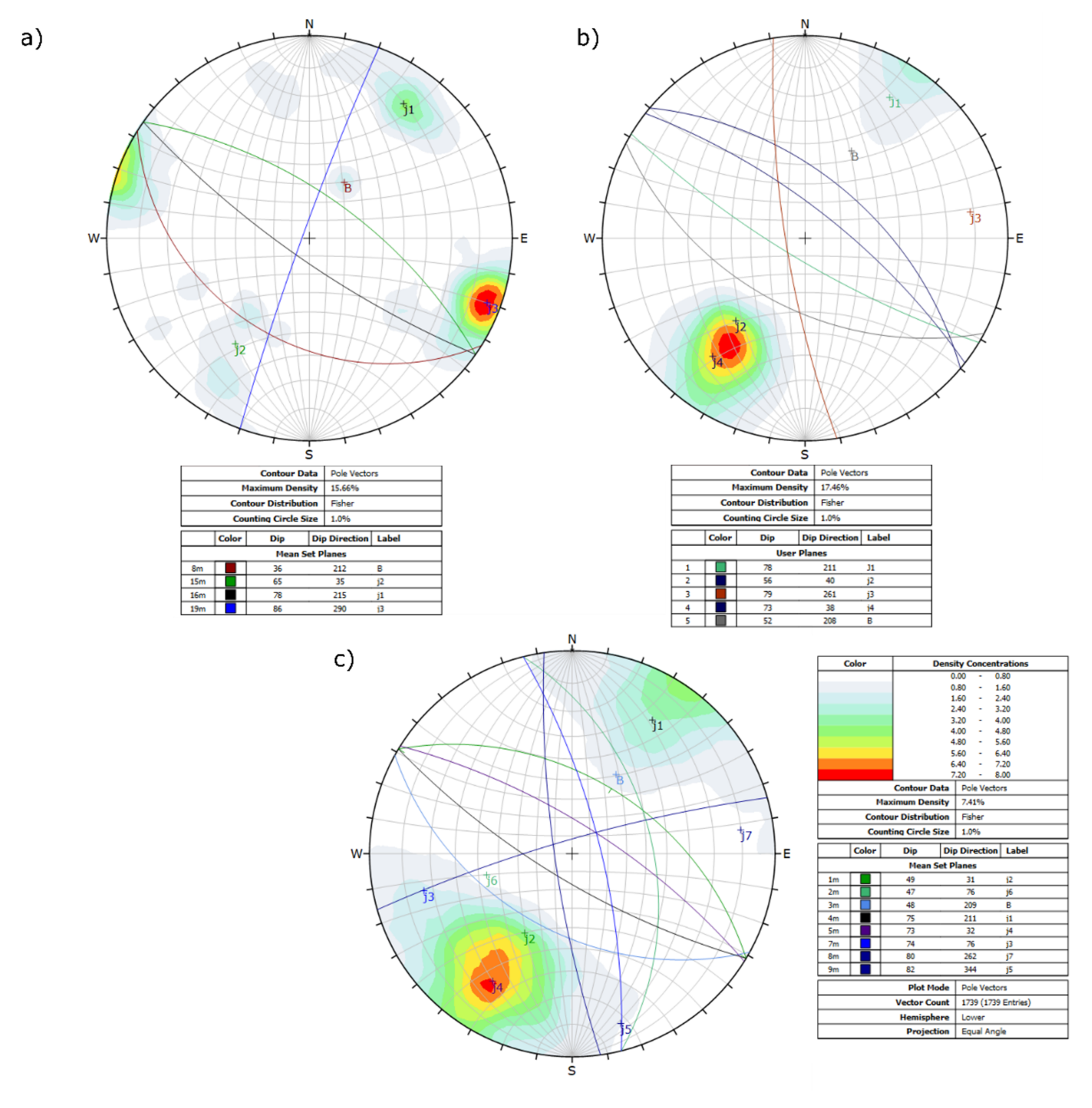
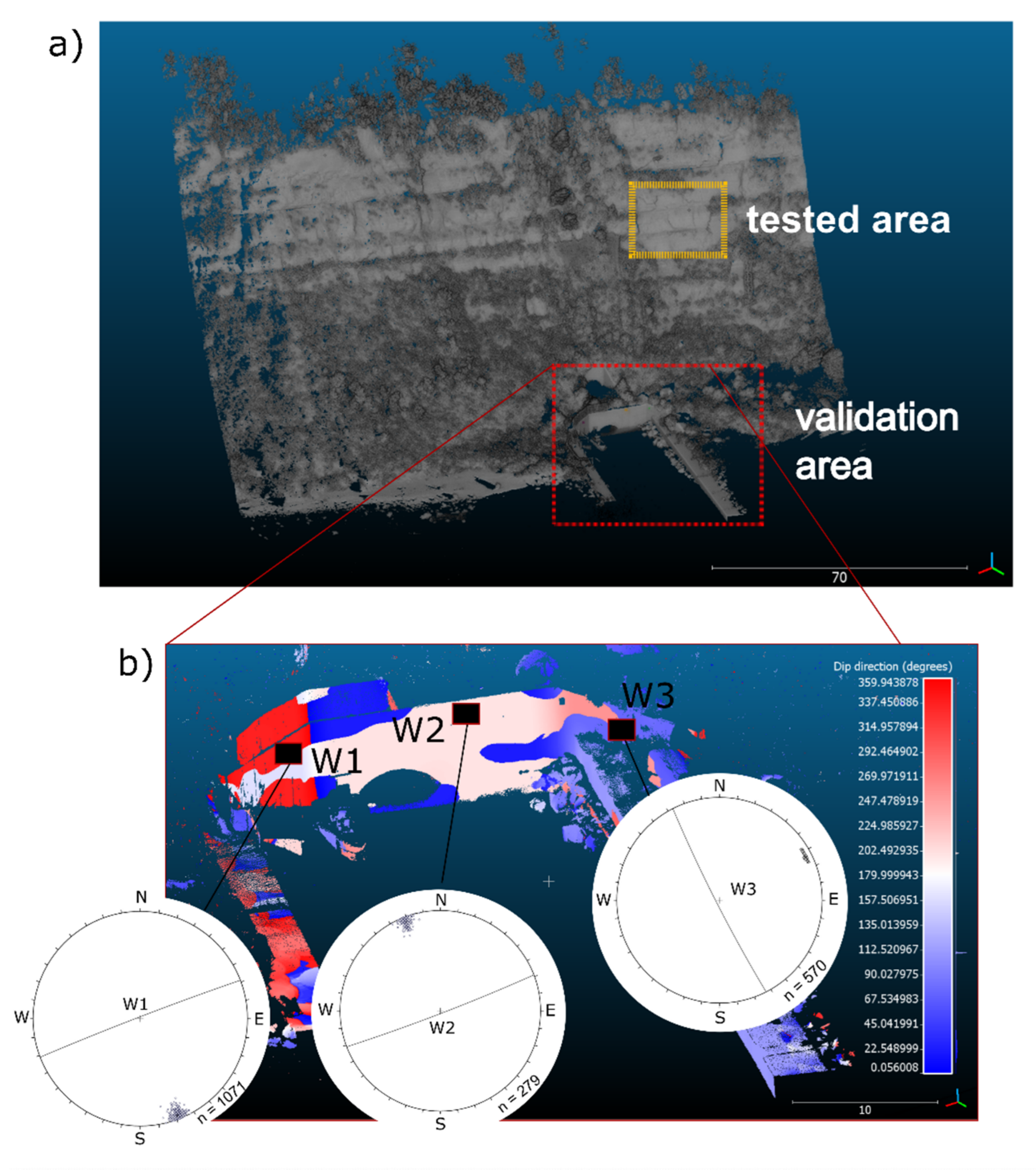
4.1. Identification of Discontinuity Sets in the Tested Area
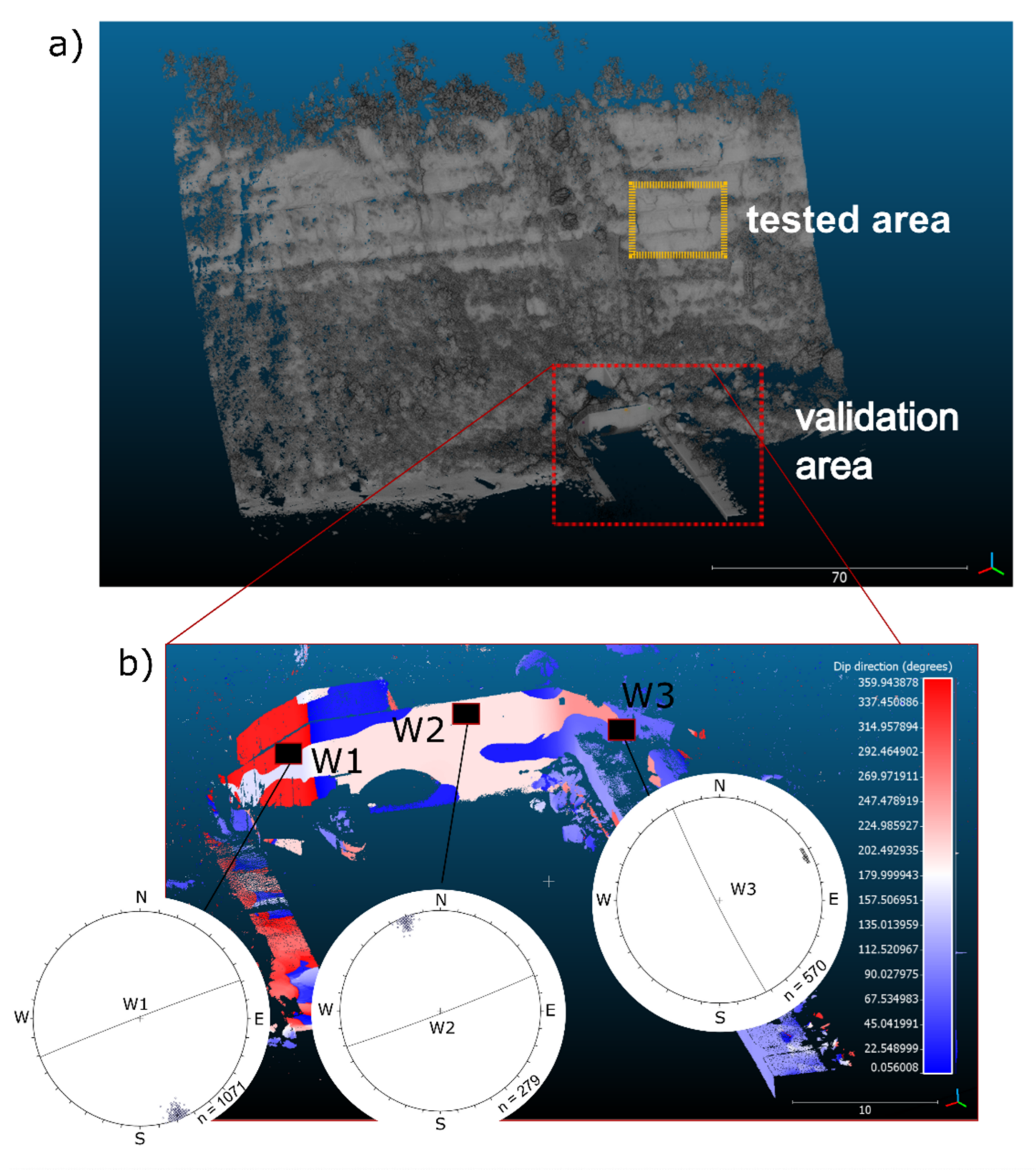
4.2. Validation of the Algorithm for the Clusters Determination
4.3. Spacing Calculation
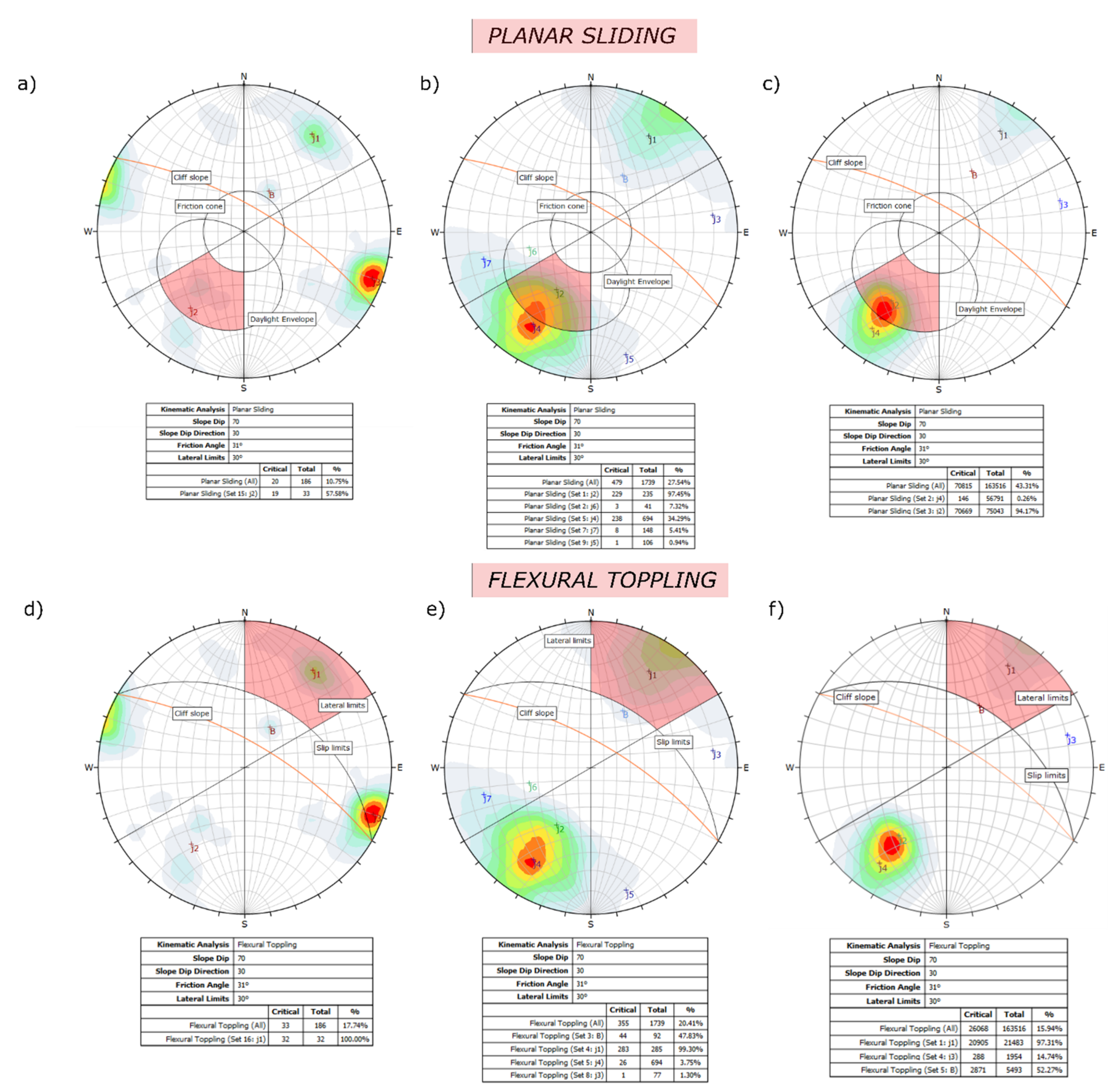
4.4. Kinematic Analysis of Rock Slope Failure
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Bieniawski, Z.T. Engineering Classification of Jointed Rock Masses. Civ. Eng. Siviele Ing. 1973, 1973, 335–343. [Google Scholar]
- Priest, S.D.; Hudson, J.A. Discontinuity Spacings in Rock. Int. J. Rock Mech. Min. Sci. Geomech. 1976, 13, 135–148. [Google Scholar] [CrossRef]
- Priest, S.D.; Hudson, J.A. Estimation of Discontinuity Spacing and Trace Length Using Scanline Surveys. Int. J. Rock Mech. Min. Sci. Geomech. 1981, 18, 183–197. [Google Scholar] [CrossRef]
- Priest, S.D. Discontinuity Analysis for Rock Engineering; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1993; ISBN 0-412-47600-2. [Google Scholar]
- Kemeny, J.; Donovan, J. Rock Mass Characterisation Using LIDAR and Automated Point Cloud Processing. Ground Eng. 2005, 38, 26–29. [Google Scholar]
- Monte, J.M. Rock Mass Characterization Using Laser Scanning and Digital Imaging Data Collection Techniques. Master’s Thesis, The University of Arizona, Arizona, CA, USA, 2004. [Google Scholar]
- Slob, S.; van Knapen, B.; Hack, R.; Turner, K.; Kemeny, J. Method for Automated Discontinuity Analysis of Rock Slopes with Three-Dimensional Laser Scanning. Transp. Res. Rec. J. Transp. Res. Board 2005, 1913, 187–194. [Google Scholar] [CrossRef]
- Kemeny, J.; Post, R. Estimating Three-Dimensional Rock Discontinuity Orientation from Digital Images of Fracture Traces. Comput. Geosci. 2003, 29, 65–77. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Yan, M.; Stead, D.; Elmo, D. Application and Limitations of Ground-Based Laser Scanning in Rock Slope Characterization. In Rock Mechanics: Meeting Society’s Challenges and Demands; Eberhardt, E., Stead, D., Morrison, T., Eds.; CRC Press: London, UK, 2007; pp. 29–36. ISBN 978-0-415-44401-9. [Google Scholar]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial Laser Scanning of Rock Slope Instabilities. Earth Surf. Process. Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Menegoni, N.; Giordan, D.; Perotti, C.; Tannant, D.D. Detection and Geometric Characterization of Rock Mass Discontinuities Using a 3D High-Resolution Digital Outcrop Model Generated from RPAS Imagery–Ormea Rock Slope, Italy. Eng. Geol. 2019, 252, 145–163. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Metzger, R.; Oppikofer, T.; Couture, R.; Derron, M.-H.; Locat, J.; Turmel, D. New Insight Techniques to Analyze Rock-Slope Relief Using DEM and 3Dimaging Cloud Points: COLTOP-3D Software. In Proceedings of the 1st Canada-US Rock Mechanics Symposium, OnePetro, Vancouver, BC, Canada, 27–31 May 2007. [Google Scholar]
- Lato, M.J.; Vöge, M. Automated Mapping of Rock Discontinuities in 3D Lidar and Photogrammetry Models. Int. J. Rock Mech. Min. Sci. 2012, 54, 150–158. [Google Scholar] [CrossRef]
- Dewez, T.J.B.; Girardeau-Montaut, D.; Allanic, C.; Rohmer, J. Facets: A Cloudcompare Plugin to Extract Geological Planes from Unstructured 3d Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 799–804. [Google Scholar] [CrossRef] [Green Version]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-cloud Shape Detection. In The Computer Graphics Forum; Blackwell Publishing Ltd: Oxford, UK, 2007; Volume 26, pp. 214–226. [Google Scholar]
- Riquelme, A.; Tomás, R.; Cano, M.; Abellán, A. Using Open-Source Software for Extracting Geomechanical Parameters of a Rock Mass from 3D Point Clouds: Discontinuity Set Extractor and SMRtool. In Proceedings of the ISRM International Symposium—EUROCK, Cappadocia, Turkey, 29–31 August 2016; Volume 2, pp. 1091–1096. [Google Scholar]
- Loiotine, L.; Liso, I.S.; Parise, M.; Andriani, G.F. Optimization of geostructural surveys in rock mass stability analyses using remote sensing techniques. Ital. J. Eng. Geol. Environ. 2019, 1, 73–78. [Google Scholar] [CrossRef]
- Riquelme, A.; Cano, M.; Tomás, R.; Abellán, A. Identification of Rock Slope Discontinuity Sets from Laser Scanner and Photogrammetric Point Clouds: A Comparative Analysis. Procedia Eng. 2017, 191, 838–845. [Google Scholar] [CrossRef]
- Li, X.; Chen, Z.; Chen, J.; Zhu, H. Automatic Characterization of Rock Mass Discontinuities Using 3D Point Clouds. Eng. Geol. 2019, 259, 105131. [Google Scholar] [CrossRef]
- Riquelme, A.; Araújo, N.; Cano, M.; Pastor, J.L.; Tomás, R.; Miranda, T. Identification of Persistent Discontinuities on a Granitic Rock Mass Through 3D Datasets and Traditional Fieldwork: A Comparative Analysis. Inf. Technol. Geo Eng. 2020, 25, 868–878. [Google Scholar]
- Chen, N.; Cai, X.; Li, S.; Zhang, X.; Jiang, Q. Automatic Extraction of Rock Mass Discontinuity Based on 3d Laser Scanning. Q. J. Eng. Geol. Hydrogeol. 2020, 54, qjegh2020-054. [Google Scholar] [CrossRef]
- Gigli, G.; Casagli, N. Semi-Automatic Extraction of Rock Mass Structural Data from High Resolution LIDAR Point Clouds. Int. J. Rock Mech. Min. Sci. 2011, 48, 187–198. [Google Scholar] [CrossRef]
- Kong, D.; Wu, F.; Saroglou, C. Automatic Identification and Characterization of Discontinuities in Rock Masses from 3D Point Clouds. Eng. Geol. 2020, 265, 105442. [Google Scholar] [CrossRef]
- Pontoglio, E.; Colucci, E.; Lingua, A.; Maschio, P.; Migliazza, M.R.; Scavia, C. Uav and close-range photogrammetry to support geo-mechanical analysis in safety road management: The “vallone d’elva” road. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 1159–1166. [Google Scholar] [CrossRef]
- Battulwar, R.; Zare-Naghadehi, M.; Emami, E.; Sattarvand, J. A State-of-the-Art Review of Automated Extraction of Rock Mass Discontinuity Characteristics Using Three-Dimensional Surface Models. J. Rock Mech. Geotech. Eng. 2021, 13, 920–936. [Google Scholar] [CrossRef]
- Monsalve, J.J.; Pfreundschuh, A.; Soni, A.; Ripepi, N. Automated Discontinuity Extraction Software Versus Manual Virtual Discontinuity Mapping: Performance Evaluation in Rock Mass Characterization and Rockfall Hazard Identification. Min. Metall. Explor. 2021, 38, 1383–1394. [Google Scholar] [CrossRef]
- Riquelme, A.; Tomás, R.; Cano, M.; Pastor, J.L.; Jordá-Bordehore, L. Extraction of Discontinuity Sets of Rocky Slopes Using IPhone-12 Derived 3DPC and Comparison to TLS and SfM Datasets. IOP Conf. Ser. Earth Environ. Sci. 2021, 833, 12056. [Google Scholar] [CrossRef]
- Migliazza, M.; Carriero, M.T.; Lingua, A.; Pontoglio, E.; Scavia, C. Rock Mass Characterization by UAV and Close-Range Photogrammetry: A Multiscale Approach Applied along the Vallone Dell’Elva Road (Italy). Geosciences 2021, 11, 436. [Google Scholar] [CrossRef]
- Gomes, R.K.; de Oliveira, L.P.; Gonzaga, L., Jr.; Tognoli, F.M.; Veronez, M.R.; de Souza, M.K. An Algorithm for Automatic Detection and Orientation Estimation of Planar Structures in LiDAR-Scanned Outcrops. Comput. Geosci. 2016, 90, 170–178. [Google Scholar] [CrossRef]
- Ferrero, A.M.; Forlani, G.; Roncella, R.; Voyat, H.I. Advanced Geostructural Survey Methods Applied to Rock Mass Characterization. Rock Mech. Rock Eng. 2009, 42, 631–665. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Blikra, L.; Derron, M.-H.; Metzger, R. Characterization and Monitoring of the Åknes Rockslide Using Terrestrial Laser Scanning. Nat. Hazards Earth Syst. Sci. 2009, 9, 1003–1019. [Google Scholar] [CrossRef] [Green Version]
- Slob, S. Automated Rock Mass Characterisation Using 3-D Terrestrial Laser Scanning; Wöhrmann Print Service: Zutphen, The Netherlands, 2010. [Google Scholar]
- Riquelme, A.J.; Abellán, A.; Tomás, R. Discontinuity Spacing Analysis in Rock Masses Using 3D Point Clouds. Eng. Geol. 2015, 195, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Palmstrom, A. In Situ Characterization of Rocks; Measurement And Characterization Of Rock Mass Jointing; A. A. Balkema Publishers: Rotterdam, Netherlands, 2001; pp. 49–97. [Google Scholar]
- Admassu, Yonathan User’s Guide DipAnalyst 2.0 for Windows 2012. Available online: https://d32ogoqmya1dw8.cloudfront.net/files/getsi/teaching_materials/high-rez-topo/kinematic_analysis_manual_using.pdf (accessed on 1 May 2022).
- Dypvik, H.; Burchell, M.; Claeys, P. Cratering in Marine Environments and on Ice; Springer Science&Business Media: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Montanari, A.; Coccioni, R.; Odin, G.S. Miocene Stratigraphy: An Integrated Approach; Elsevier: Amsterdam, The Netherlands, 1997; ISBN 0-08-053657-3. [Google Scholar]
- Montanari, A.; Koeberl, C. Impact Stratigraphy: The Italian Record; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; p. 93. ISBN 3-540-66368-1. [Google Scholar]
- Deiana, G.; Cello, G.; Chiocchini, M.; Galdenzi, S.; Mazzoli, S.; Pistolesi, E.; Potetti, M.; Romano, A.; Turco, E.; Principi, M. Tectonic Evolution of the External Zones of the Umbria-Marche Apennines in the Monte San Vicino-Cingoli Area. Boll. Della Soc. Geol. Ital. 2002, 121, 229–238. [Google Scholar]
- Mazzoli, S.; Deiana, G.; Galdenzi, S.; Cello, G. Miocene Fault-Controlled Sedimentation and Thrust Propagation in the Previously Faulted External Zones of the Umbria-Marche Apennines, Italy. Stephan Mueller Spec. Publ. Ser. 2002, 1, 195–209. [Google Scholar] [CrossRef]
- Vannoli, P.; Basili, R.; Valensise, G. New Geomorphic Evidence for Anticlinal Growth Driven by Blind-Thrust Faulting along the Northern Marche Coastal Belt (Central Italy). J. Seismol. 2004, 8, 297–312. [Google Scholar] [CrossRef]
- Aringoli, D.; Gentili, B.; Materazzi, M.; Pambianchi, G.; Farabollini, P. Il ruolo della gravità nell’evoluzione geomorfologica di un’area di falesia: Il caso del Monte Conero (Mare Adriatico, Italia centrale). Studi Costieri. 2014, 22, 19–32. [Google Scholar]
- APAT. Rapporto Sulle Frane in Italia: Il Progetto IFFI: Metodologia, Risultati e Rapporti Regionali; Agenzia Per La Protezione Dell’ambiente E Per I Servizi Tecnici (APAT): Roma, Italy, 2007; ISBN 88-448-0310-0. [Google Scholar]
- Cancelli, A.; Marabini, F.; Pellegrini, M.; Tonnetti, G. Incidenza Delle Frane Sull’evoluzione Della Costa Adriatica Da Pesaro a Vasto. Mem. Della Soc. Geol. Ital. 1984, 27, 555–568. [Google Scholar]
- Casagli, N.; Garzonio, C.A.; Nanni, T. Geomechanical Characterization and Slope Instability of the Marly Sea Cliffs of Ancona, Italy. In Proceedings of the International Symposium, Athens, Greece, 20–23 September 1993; pp. 1093–1100. [Google Scholar]
- Iadanza, C.; Trigila, A.; Vittori, E.; Serva, L. Landslides in Coastal Areas of Italy. Geol. Soc. Lond. Spec. Publ. 2009, 322, 121–141. [Google Scholar] [CrossRef]
- Fruzzetti, V.M.E.; Segato, D.; Ruggeri, P.; Vita, A.; Sakellariadi, E.; Scarpelli, G. Fenomeni di instabilità della falesia del monte conero: Ruolo dell’assetto strutturale. In Proceedings of the Incontro Annuale dei Ricercatori di Geotecnica-IARG, Torino, Italy, 4–6 July 2011. [Google Scholar]
- Troiani, F.; Martino, S.; Marmoni, G.M.; Menichetti, M.; Torre, D.; Iacobucci, G.; Piacentini, D. Integrated Field Surveying and Land Surface Quantitative Analysis to Assess Landslide Proneness in the Conero Promontory Rocky Coast (Italy). Appl. Sci. 2020, 10, 4793. [Google Scholar] [CrossRef]
- Montanari, A.; Mainiero, M.; Coccioni, R.; Pignocchi, G. Catastrophic Landslide of Medieval Portonovo (Ancona, Italy). Bulletin 2016, 128, 1660–1678. [Google Scholar] [CrossRef]
- Almagià, R. Studi Geografici Sulle Frane in Italia, Vol. II, L’Appennino Centrale e Meridionale. Conclus. Gen. Mem Soc. Geogr. Roma 1910, 14, 431. [Google Scholar]
- Cumin, G. Il Promontorio Del Conero. Boll. Soc. Geogr. 1936, 14, 360–391. [Google Scholar]
- Carta Geologica Regionale, Edizione CTR, Sezione 291140 Montelago, Scala 1:10,000 Regione Marche, [Regional Geological Map at the Scale 1: 10,000, Sheet 282150 ‘Ancona’.] CTR Edition. 2003. Available online: https://www.regione.marche.it/Regione-Utile/Paesaggio-Territorio-Urbanistica/Cartografia/Repertorio/Cartageologicaregionale10000 (accessed on 1 May 2022).
- De Vallejo, L.G.; Ferrer, M. Geological Engineering; CRC Press: London, UK, 2011; ISBN 1-4398-8199-5. [Google Scholar]
- Terzaghi, R.D. Sources of Error in Joint Surveys. Geotechnique 1965, 15, 287–304. [Google Scholar] [CrossRef]
- Markland, J.T. A useful technique for estimating the stability of rock slopes when the rigid wedge sliding type of failure is expected. Imp. Coll. Rock Mech. Res. Rep. 1972, 19, 10. [Google Scholar]
- Available online: https://www.Microgeo.It/It/Laser-Scanner-Full3d-Multipletargets/Laser-Scanner-Riegl-Vz400i.Aspx (accessed on 1 July 2020).
- Sturzenegger, M.; Stead, D. Close-Range Terrestrial Digital Photogrammetry and Terrestrial Laser Scanning for Discontinuity Characterization on Rock Cuts. Eng. Geol. 2009, 106, 163–182. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D Terrestrial Lidar Data Classification of Complex Natural Scenes Using a Multi-Scale Dimensionality Criterion: Applications in Geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Babiker, A.F.A.; Smith, C.C.; Gilbert, M.; Ashby, J.P. Non-Associative Limit Analysis of the Toppling-Sliding Failure of Rock Slopes. Int. J. Rock Mech. Min. Sci. 2014, 71, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Budetta, P. Some Remarks on the Use of Deterministic and Probabilistic Approaches in the Evaluation of Rock Slope Stability. Geosciences 2020, 10, 163. [Google Scholar] [CrossRef]
- Goodman, R.E. Introduction to Rock Mechanics; Wiley: New York, NY, USA, 1989; Volume 2. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Final RMS [m] | 0.0164765 | |||
|---|---|---|---|---|
| Transformation matrix | 0.999 | 0.043 | 0.000 | −61.794 |
| −0.043 | 0.999 | 0.000 | 113.865 | |
| −0.000 | −0.000 | 1.000 | 47.718 | |
| 0.000 | 0.000 | 0.000 | 1.000 | |
| Scale [m] | 0.999695 | |||
| Cluster ID | Field Survey Orientation (F) | DCS Algorithm | FACETS Orientation | |||
|---|---|---|---|---|---|---|
| DA/DD [°] | DA/DD [°] | Δmc | (DA/DD) [°] | Δmc | ΔDSC-F | |
| j1 | 76/203 | 78/211 | 2/−8 | 75/211 | 1/−8 | −3/0 |
| j2 | 66/36 | 73/38 | −7/2 | 73/32 | −7/4 | 0/6 |
| j3 | 80/290 | 79/261 | 1/29 | 79/262 | 1/28 | 0/−1 |
| j4 | n.d./n.d. | 56/40 | n.d./n.d. | 49/31 | n.d./n.d. | 7/9 |
| Bedding (B) | 36/212 | 52/208 | n.d./n.d. | 48/209 | −12/3 | 4/−1 |
| j5 | n.d./n.d. | n.d./n.d. | n.d./n.d. | 73/344 | n.d./n.d. | n.d./n.d. |
| j6 | n.d./n.d. | n.d./n.d. | n.d./n.d. | 47/76 | n.d./n.d. | n.d./n.d. |
| j7 | n.d./n.d. | n.d./n.d. | n.d./n.d. | 74/76 | n.d./n.d. | n.d./n.d. |
| RMSE | n.a | 9.01/15.2 | 7.0/14.8 | 19.8/14.7 | ||
| Set ID | j1 | j2 | j3 | j4 | B |
|---|---|---|---|---|---|
| Max | 0.23 | 0.67 | 1.94 | 0.14 | 1.04 |
| Mean | 0.07 | 0.34 | 0.18 | 0.04 | 0.13 |
| st. dev. | 0.06 | 0.27 | 0.32 | 0.03 | 0.21 |
| n points | |||||
| Field value | 0.06 | 0.30 | 0.10 | - | 0.17 |
| Δmc | 0.01 | 0.04 | 0.08 | - | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mammoliti, E.; Di Stefano, F.; Fronzi, D.; Mancini, A.; Malinverni, E.S.; Tazioli, A. A Machine Learning Approach to Extract Rock Mass Discontinuity Orientation and Spacing, from Laser Scanner Point Clouds. Remote Sens. 2022, 14, 2365. https://doi.org/10.3390/rs14102365
Mammoliti E, Di Stefano F, Fronzi D, Mancini A, Malinverni ES, Tazioli A. A Machine Learning Approach to Extract Rock Mass Discontinuity Orientation and Spacing, from Laser Scanner Point Clouds. Remote Sensing. 2022; 14(10):2365. https://doi.org/10.3390/rs14102365
Chicago/Turabian StyleMammoliti, Elisa, Francesco Di Stefano, Davide Fronzi, Adriano Mancini, Eva Savina Malinverni, and Alberto Tazioli. 2022. "A Machine Learning Approach to Extract Rock Mass Discontinuity Orientation and Spacing, from Laser Scanner Point Clouds" Remote Sensing 14, no. 10: 2365. https://doi.org/10.3390/rs14102365
APA StyleMammoliti, E., Di Stefano, F., Fronzi, D., Mancini, A., Malinverni, E. S., & Tazioli, A. (2022). A Machine Learning Approach to Extract Rock Mass Discontinuity Orientation and Spacing, from Laser Scanner Point Clouds. Remote Sensing, 14(10), 2365. https://doi.org/10.3390/rs14102365