
Loess Landslide Detection Using Object Detection Algorithms in Northwest China


 , ,
, ,  ,
, 
Abstract
:
1. Introduction
2. Data and Methods
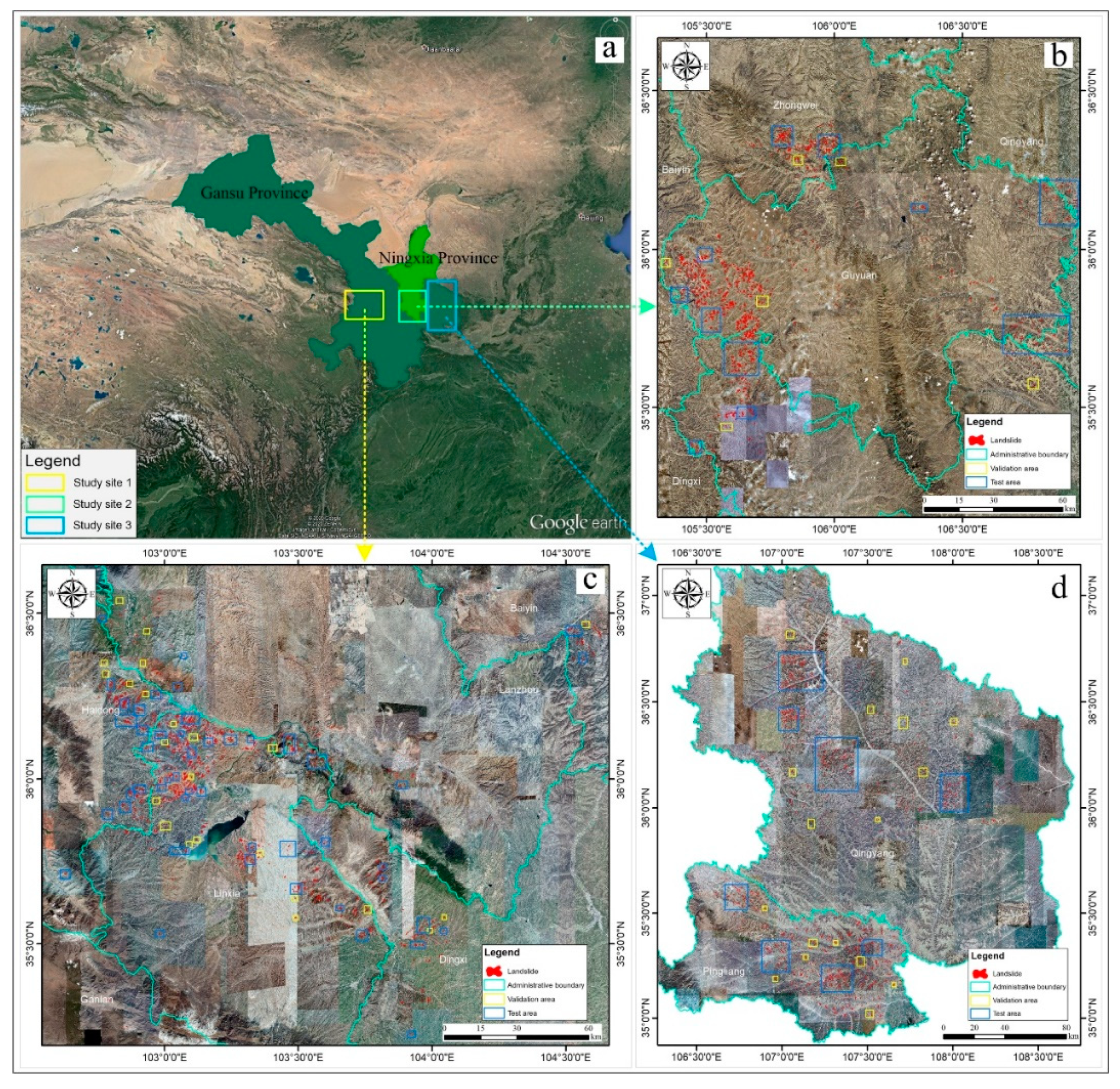
2.1. Study Sites
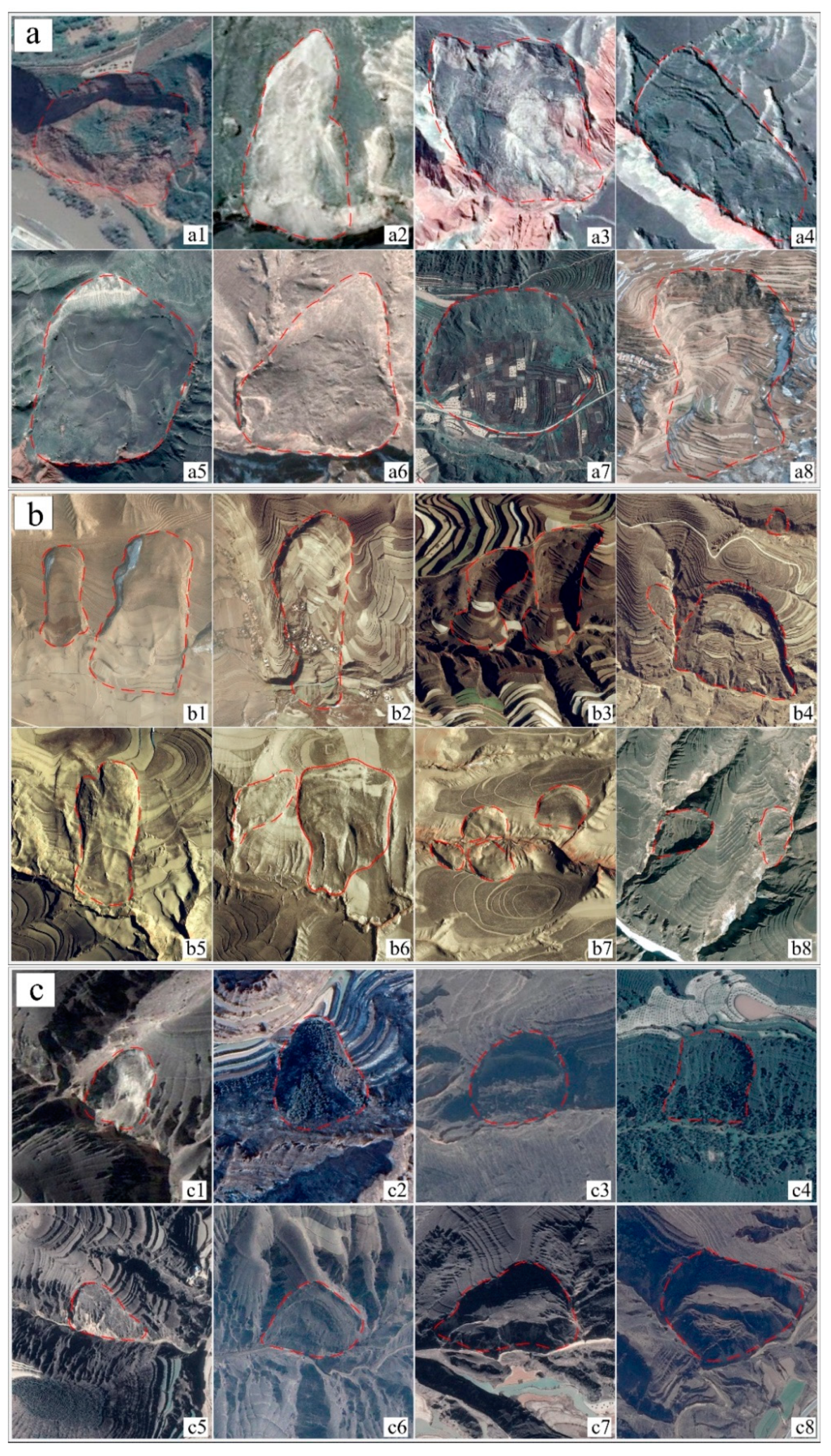
2.2. Data Labeling and Data Set Division
2.3. Deep Learning Methods
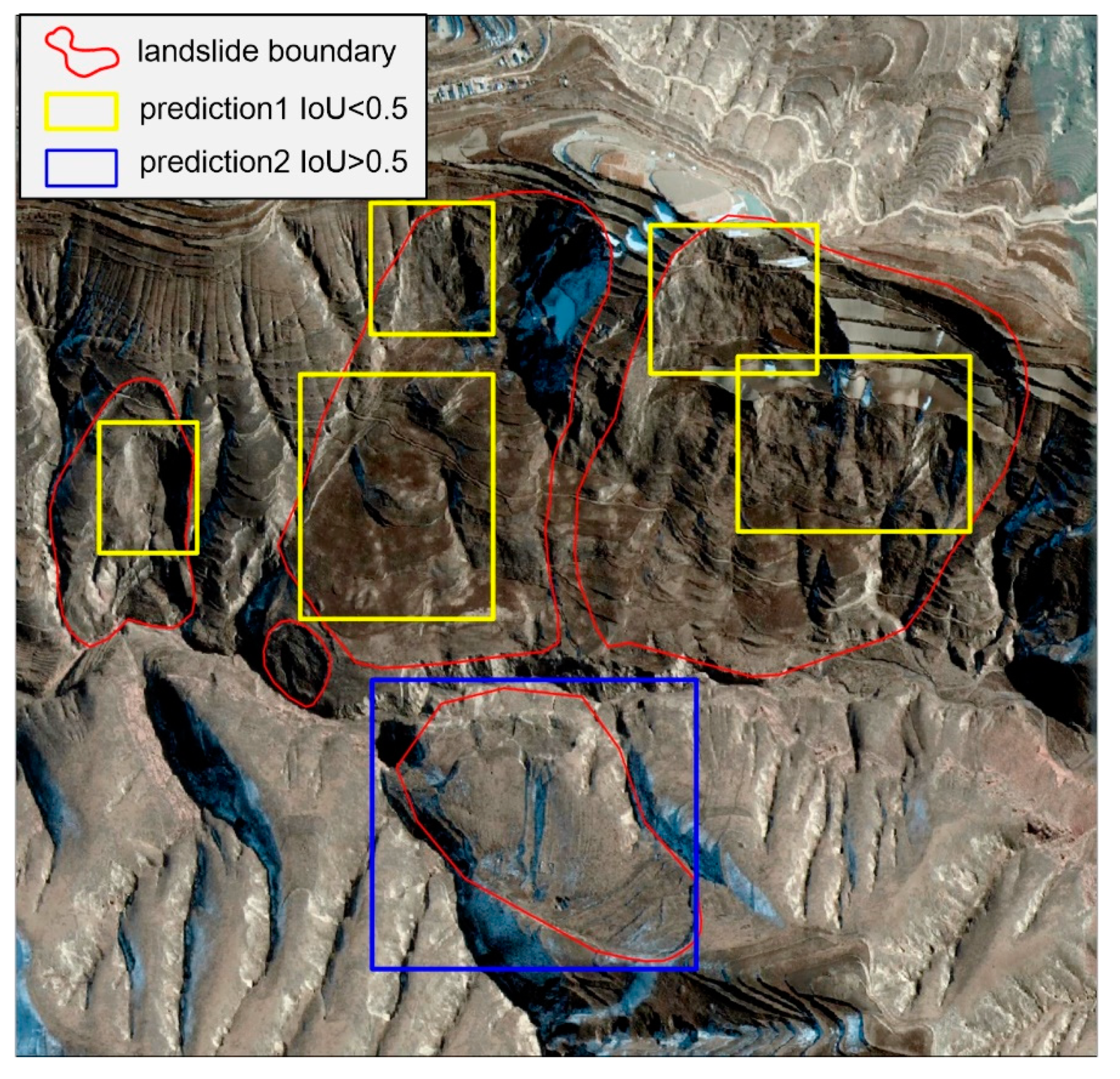
2.4. Accuracy Evaluation
3. Results
4. Discussion
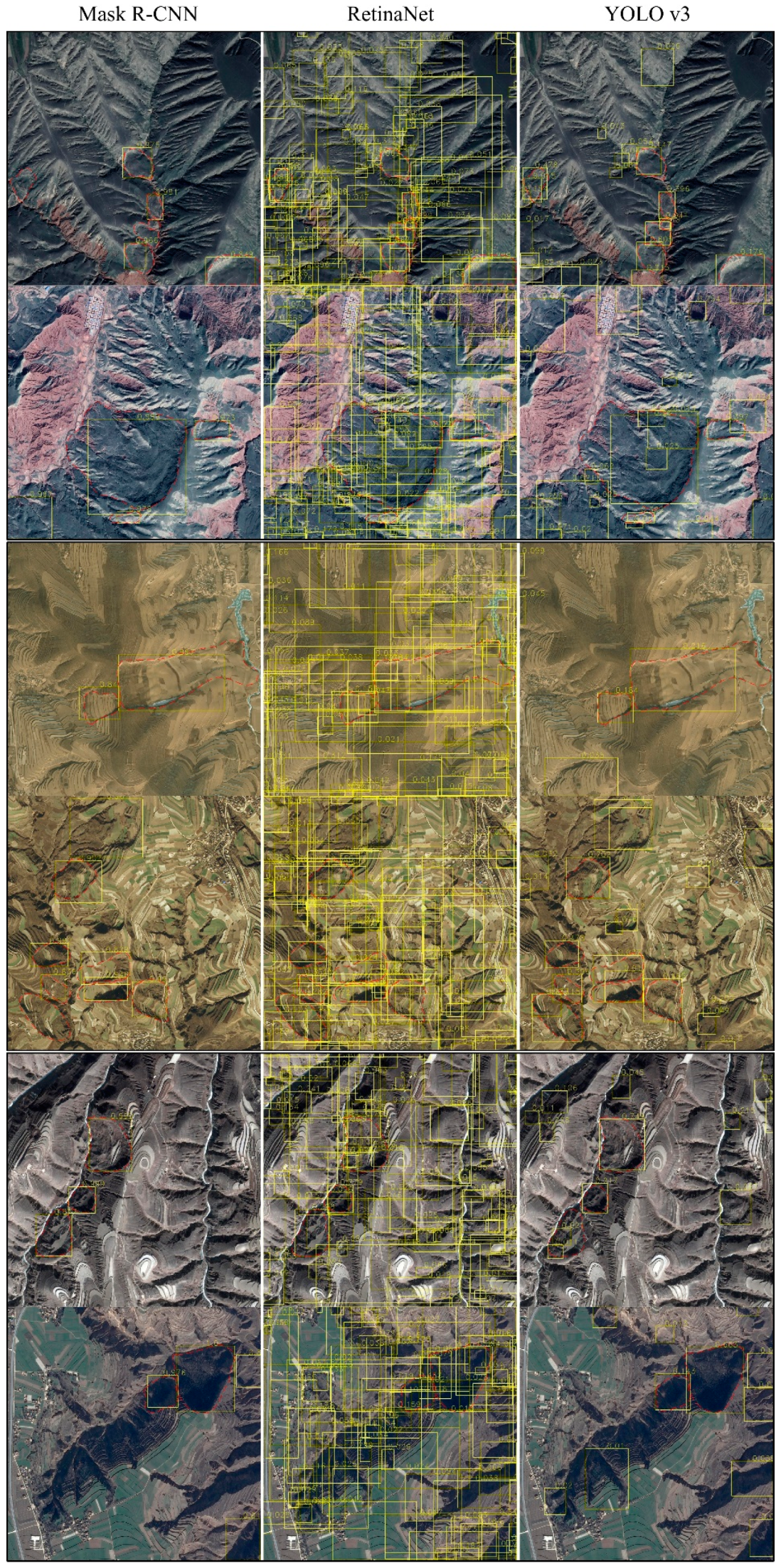
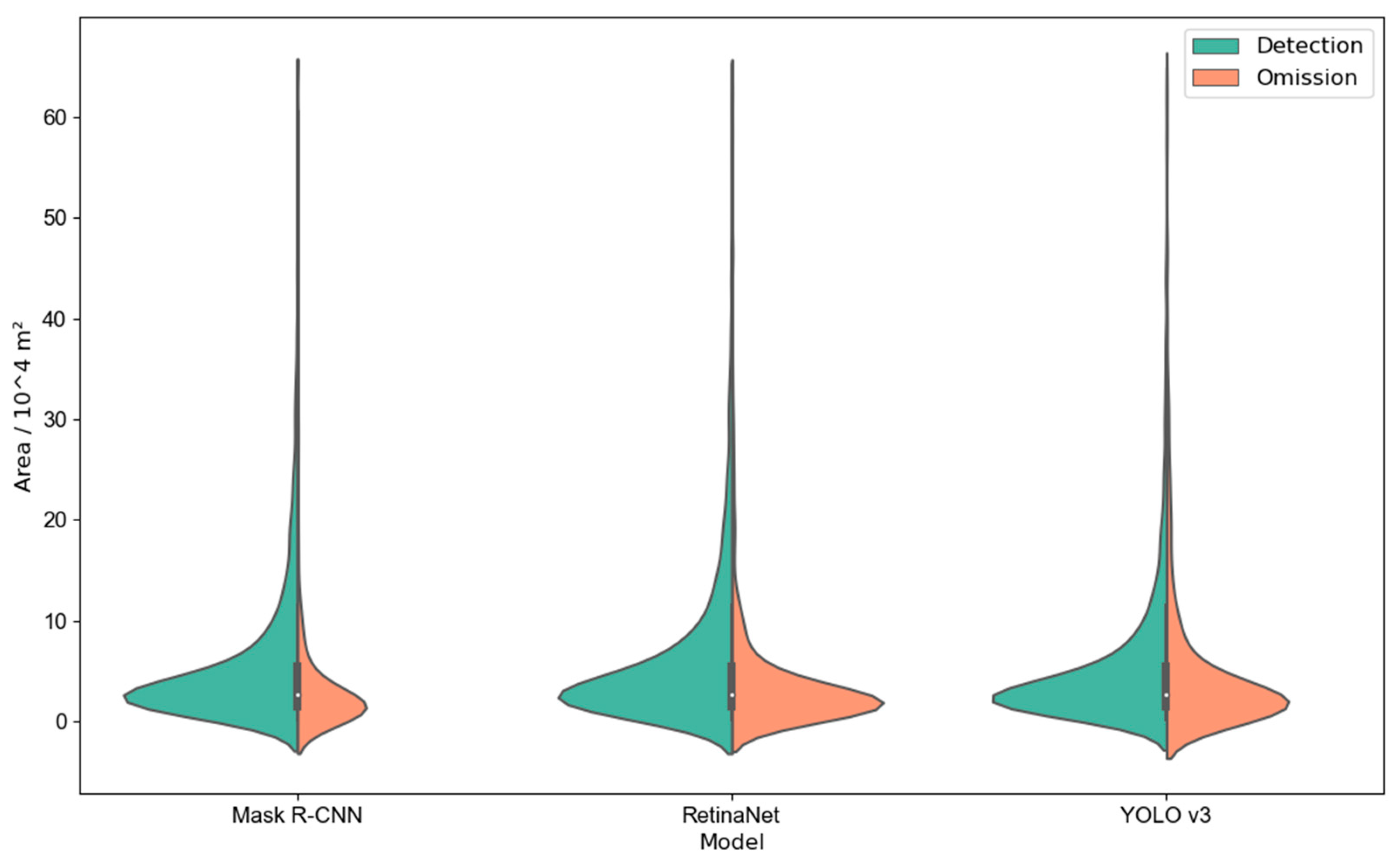
4.1. Landslide Detection Accuracy of Different Models
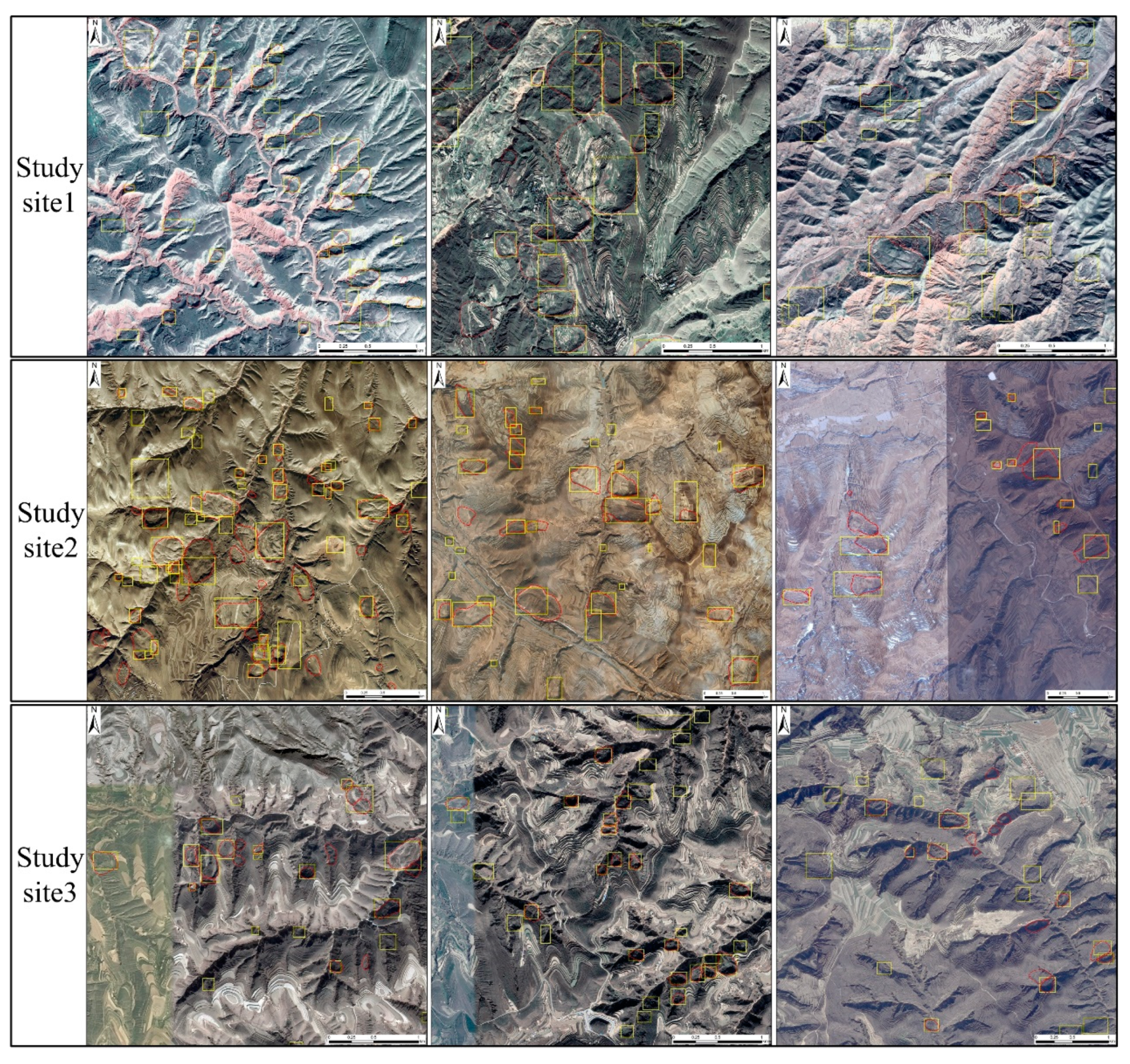
4.2. Identification Accuracy of Different Study Sites
4.3. Multi-Category and Multi-Position Landslide Detection Based on Multi-Sourced Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Q.; Tang, M.G.; Xu, K.X.; Huang, X. Research on Space-time Evolution Laws and Early Warning-prediction of Landslides. Chin. J. Rock Mech. Eng. 2008, 27, 1104–1112. [Google Scholar]
- Shi, X.; Xu, Q.; Zhang, L.; Zhao, K.; Dong, J.; Jiang, H.; Liao, M. Surface displacements of the Heifangtai terrace in Northwest China measured by X and C-band InSAR observations. Eng. Geol. 2019, 259, 105181. [Google Scholar] [CrossRef]
- Xu, Q.; Li, W.; Ju, Y.Z.; Dong, X.J.; Peng, D.L. Multitemporal UAV-based photogrammetry for landslide detection and monitoring in a large area: A case study in the Heifangtai terrace in the Loess Plateau of China. J. Mt. Sci. 2020, 17, 1826–1839. [Google Scholar] [CrossRef]
- Guzzetti, F.; Reichenbach, P.; Ardizzone, F.; Cardinali, M.; Galli, M. Estimating the quality of landslide susceptibility models. Geomorphology 2006, 81, 166–184. [Google Scholar] [CrossRef]
- Huang, R.Q.; Li, W.L. Analysis of the geo-hazards triggered by the 12 May 2008 Wenchuan Earthquake, China. Bull. Eng. Geol. Environ. 2009, 68, 363–371. [Google Scholar] [CrossRef]
- Sato, H.P.; Hasegawa, H.; Fujiwara, S.; Tobita, M.; Koarai, M.; Une, H.; Iwahashi, J. Interpretation of landslide distribution triggered by the 2005 Northern Pakistan earthquake using SPOT 5 imagery. Landslides 2007, 4, 113–122. [Google Scholar] [CrossRef]
- Leshchinsky, B.A.; Olsen, M.J.; Tanyu, B.F. Contour Connection Method for automated identification and classification of landslide deposits. Comput. Geosci. 2015, 74, 27–38. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, C.J.; Kumar, K.V. Characterising spectral, spatial and morphometric properties of landslides for semi-automatic detection using object-oriented methods. Geomorphology 2010, 116, 24–36. [Google Scholar] [CrossRef]
- Sun, W.; Tian, Y.; Mu, X.; Zhai, J.; Gao, P.; Zhao, G. Loess landslide inventory map based on GF-1 satellite imagery. Remote. Sens. 2017, 9, 314. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using LiDAR data and the random forest algorithm: A case study of the Three Gorges, China. Remote. Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Gorsevski, P.V.; Brown, M.K.; Panter, K.; Onasch, C.M.; Simic, A.; Snyder, J. Landslide detection and susceptibility mapping using LiDAR and an artificial neural network approach: A case study in the Cuyahoga Valley National Park, Ohio. Landslides 2016, 13, 467–484. [Google Scholar] [CrossRef]
- Mezaal, M.R.; Pradhan, B. An improved algorithm for identifying shallow and deep-seated landslides in dense tropical forest from airborne laser scanning data. Catena 2018, 167, 147–159. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote. Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Van Den Eeckhaut, M.; Kerle, N.; Poesen, J.; Hervás, J. Object-oriented identification of forested landslides with derivatives of single pulse LiDAR data. Geomorphology 2012, 11, 30–42. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection. Remote. Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Ghorbanzadeh, O.; Meena, S.R.; Blaschke, T.; Aryal, J. UAV-based slope failure detection using deep-learning convolutional neural networks. Remote. Sens. 2019, 11, 2046. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide detection from an open satellite imagery and digital elevation model dataset using attention boosted convolutional neural networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. Mapping Landslides on EO Data: Performance of Deep Learning Models vs. Traditional Machine Learning Models. Remote. Sens. 2020, 12, 346. [Google Scholar] [CrossRef] [Green Version]
- Sameen, M.I.; Pradhan, B. Landslide Detection Using Residual Networks and the Fusion of Spectral and Topographic Information. IEEE Access 2019, 7, 114363–114373. [Google Scholar] [CrossRef]
- Yu, B.; Chen, F.; Xu, C. Landslide detection based on contour-based deep learning framework in case of national scale of Nepal in 2015. Comput. Geosci. 2020, 135, 104388–104395. [Google Scholar] [CrossRef]
- Guo, Q.; Jin, S.; Li, M.; Yang, Q.; Xu, K.; Ju, Y.; Zhang, J.; Xuan, J.; Liu, J.; Su, Y.; et al. Application of deep learning in ecological resource research: Theories, methods, and challenges. Sci. China Earth Sci. 2020, 63, 1457–1474. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, L.; Yin, K.; Luo, H.; Li, J. Landslide identification using machine learning. Geosci. Front. 2021, 12, 351–364. [Google Scholar] [CrossRef]
- Yi, Y.; Zhang, W. A New Deep-Learning-Based Approach for Earthquake-Triggered Landslide Detection from Singleoral RapidEye Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6166–6176. [Google Scholar] [CrossRef]
- Qi, W.; Wei, M.; Yang, W.; Xu, C. Automatic Mapping of Landslides by the ResU-Net. Remote Sens. 2020, 12, 2487. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Peng, J.; Wang, S.; Wang, Q.; Zhuang, J.; Huang, W.; Zhu, X.; Leng, Y.; Ma, P. Distribution and genetic types of loess landslides in China. J. Asian Earth Sci. 2019, 170, 329–350. [Google Scholar] [CrossRef]
- Sun, P.; Li, R.; Jiang, H.; Igwe, O.; Shi, J. Earthquake-triggered landslides by the 1718 Tongwei earthquake in Gansu Province, northwest China. Bull. Eng. Geol. Environ. 2017, 76, 1281–1295. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, G. Study of the 1920 Haiyuan earthquake-induced landslides in loess (China). Eng. Geol. 2007, 94, 76–88. [Google Scholar] [CrossRef]
- DongJie, Z.L.; Qiang, X.; Jianya, L.G. Early Detection of Landslide Hazards in Mountainous Areas of West China Using Time Series SAR Interferometry—A Case Study of Danba, Sichuan. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 2039–2049. [Google Scholar]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 9759–9768. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Ullo, S.L.; Mohan, A.; Sebastianelli, A.; Ahamed, S.E.; Kumar, B.; Dwivedi, R.; Sinha, G.R. A new mask R-CNN-based method for improved landslide detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3799–3810. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Dataset | Landslide Area | Bounding Box Length | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Training | Validation | Testing | Max Area (103 m2) | Min Area (103 m2) | Average Area (103 m2) | Max Length (m) | Min Length (m) | Average Length (m) | |
| Site 1 | 1875 | 61 | 747 | 829.38 | 1.29 | 51.97 | 1388 | 88 | 340 |
| Site 2 | 870 | 39 | 543 | 607.37 | 1.53 | 63.18 | 1484 | 76 | 400 |
| Site 3 | 1118 | 59 | 799 | 749.41 | 4.11 | 71.55 | 1130 | 47 | 266 |
| Total | 3863 | 159 | 2089 | 829.38 | 1.29 | 51.97 | 1484 | 47 | 400 |
| Model | COCO Evaluation | Score Threshold | F1-Score Evaluation | |||
|---|---|---|---|---|---|---|
| AP | AP50 | Precision | Recall | F1-Score | ||
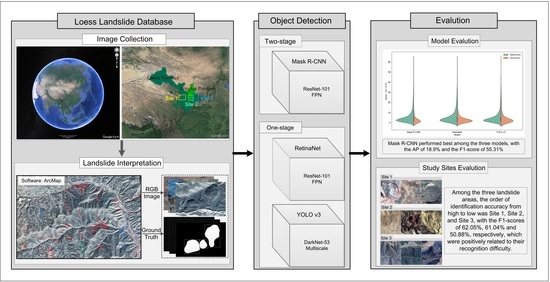
| Mask R-CNN | 18.9% | 35.7% | 0.3 | 47.41% | 66.37% | 55.31% |
| RetinaNet | 17.0% | 32.3% | 0.15 | 45.80% | 48.40% | 47.07% |
| YOLO v3 | 15.5% | 31.5% | 0.05 | 43.63% | 55.34% | 48.79% |
| Study Area | Precision | Recall | F1-Score |
|---|---|---|---|
| Site 1 | 57.42% | 67.50% | 62.05% |
| Site 2 | 52.13% | 73.62% | 61.04% |
| Site 3 | 41.35% | 66.11% | 50.88% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, Y.; Xu, Q.; Jin, S.; Li, W.; Su, Y.; Dong, X.; Guo, Q. Loess Landslide Detection Using Object Detection Algorithms in Northwest China. Remote Sens. 2022, 14, 1182. https://doi.org/10.3390/rs14051182
Ju Y, Xu Q, Jin S, Li W, Su Y, Dong X, Guo Q. Loess Landslide Detection Using Object Detection Algorithms in Northwest China. Remote Sensing. 2022; 14(5):1182. https://doi.org/10.3390/rs14051182
Chicago/Turabian StyleJu, Yuanzhen, Qiang Xu, Shichao Jin, Weile Li, Yanjun Su, Xiujun Dong, and Qinghua Guo. 2022. "Loess Landslide Detection Using Object Detection Algorithms in Northwest China" Remote Sensing 14, no. 5: 1182. https://doi.org/10.3390/rs14051182
APA StyleJu, Y., Xu, Q., Jin, S., Li, W., Su, Y., Dong, X., & Guo, Q. (2022). Loess Landslide Detection Using Object Detection Algorithms in Northwest China. Remote Sensing, 14(5), 1182. https://doi.org/10.3390/rs14051182