
Satellite–Derived Topography and Morphometry for VHR Coastal Habitat Mapping: The Pleiades–1 Tri–Stereo Enhancement


Abstract
:1. Introduction
1.1. Global Change
1.2. Landuse/Landcover Observation Techniques
1.3. Spaceborne Acquisition and Stereoscopy
2. Materials and Methods
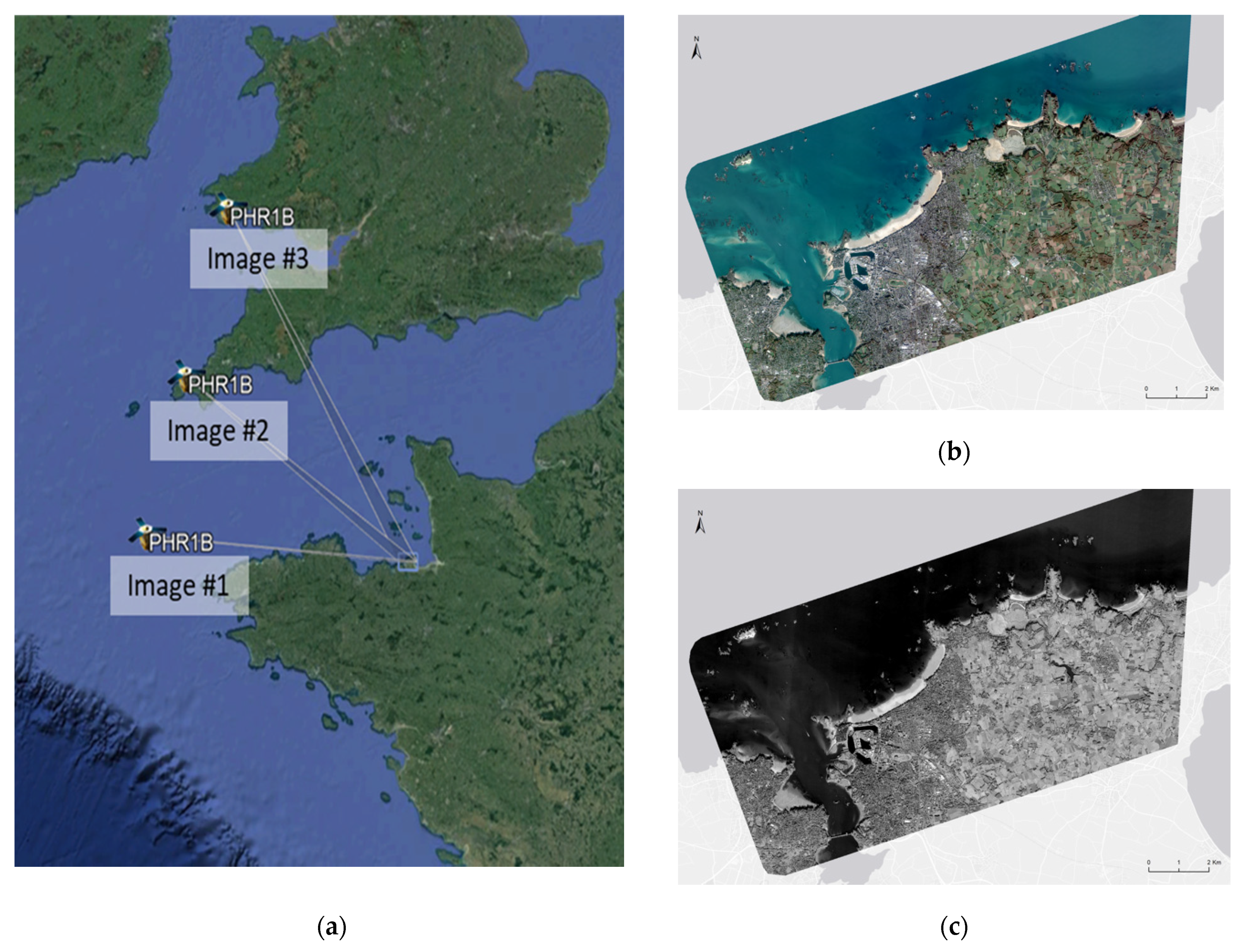
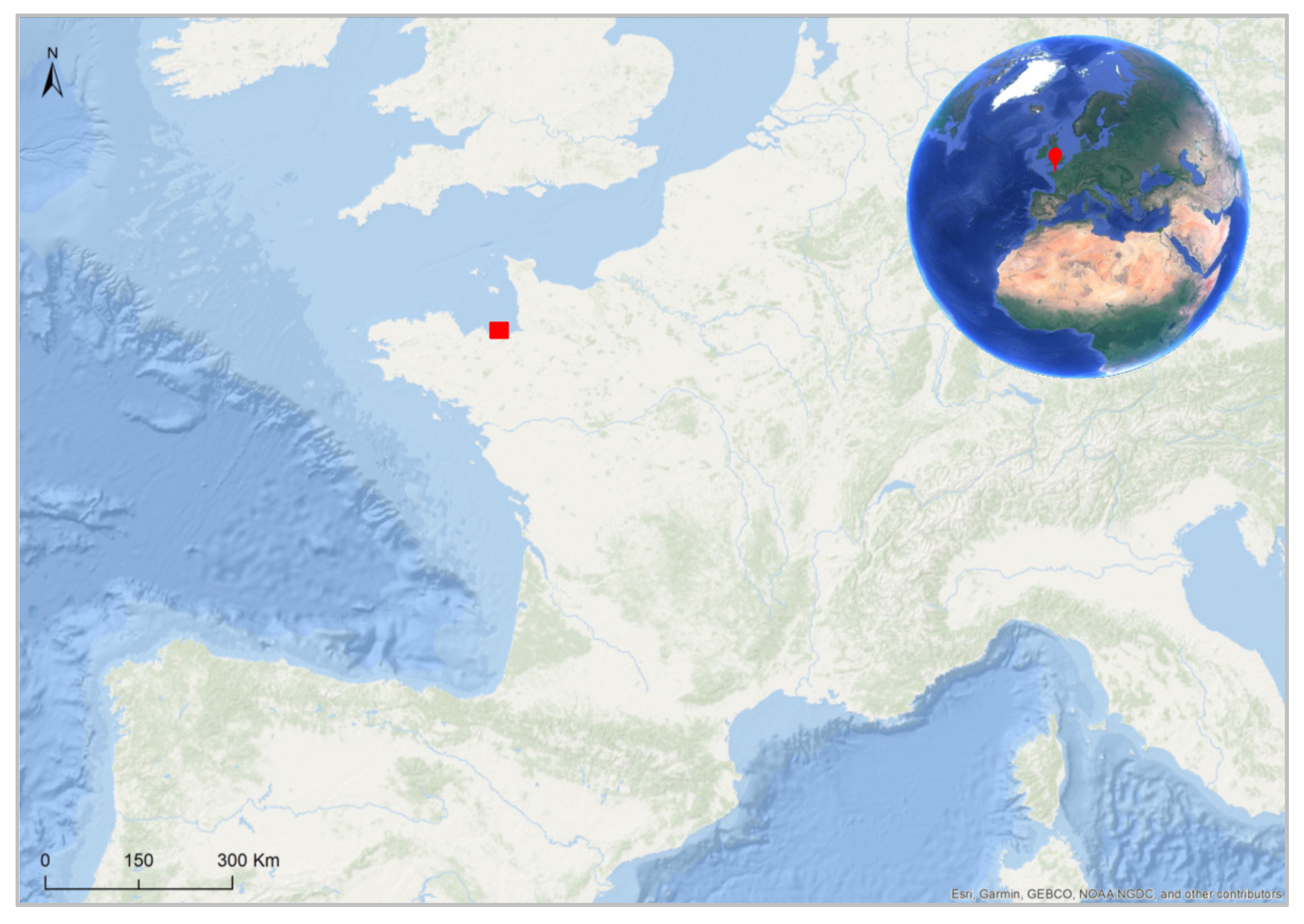
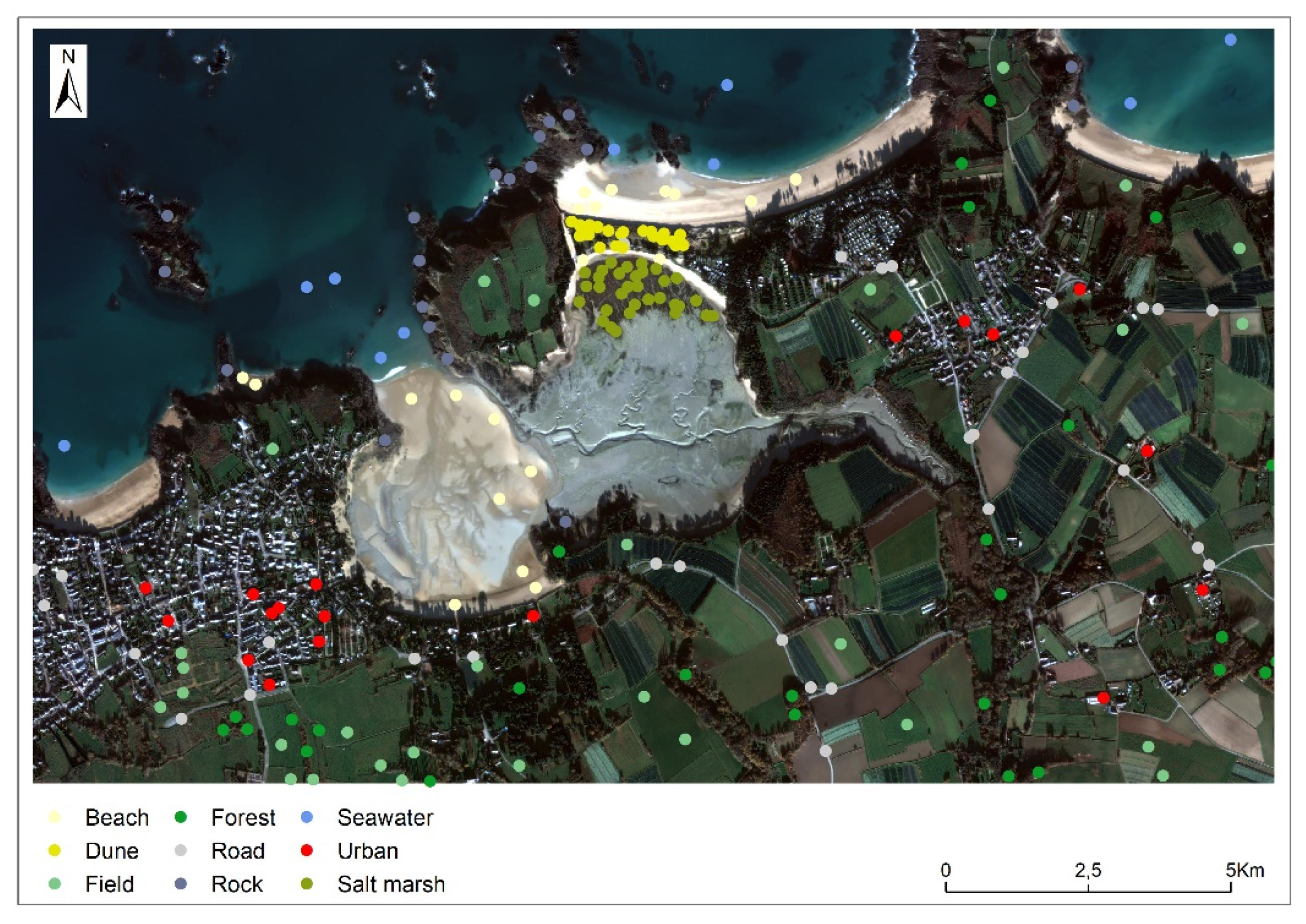
2.1. The Study Site
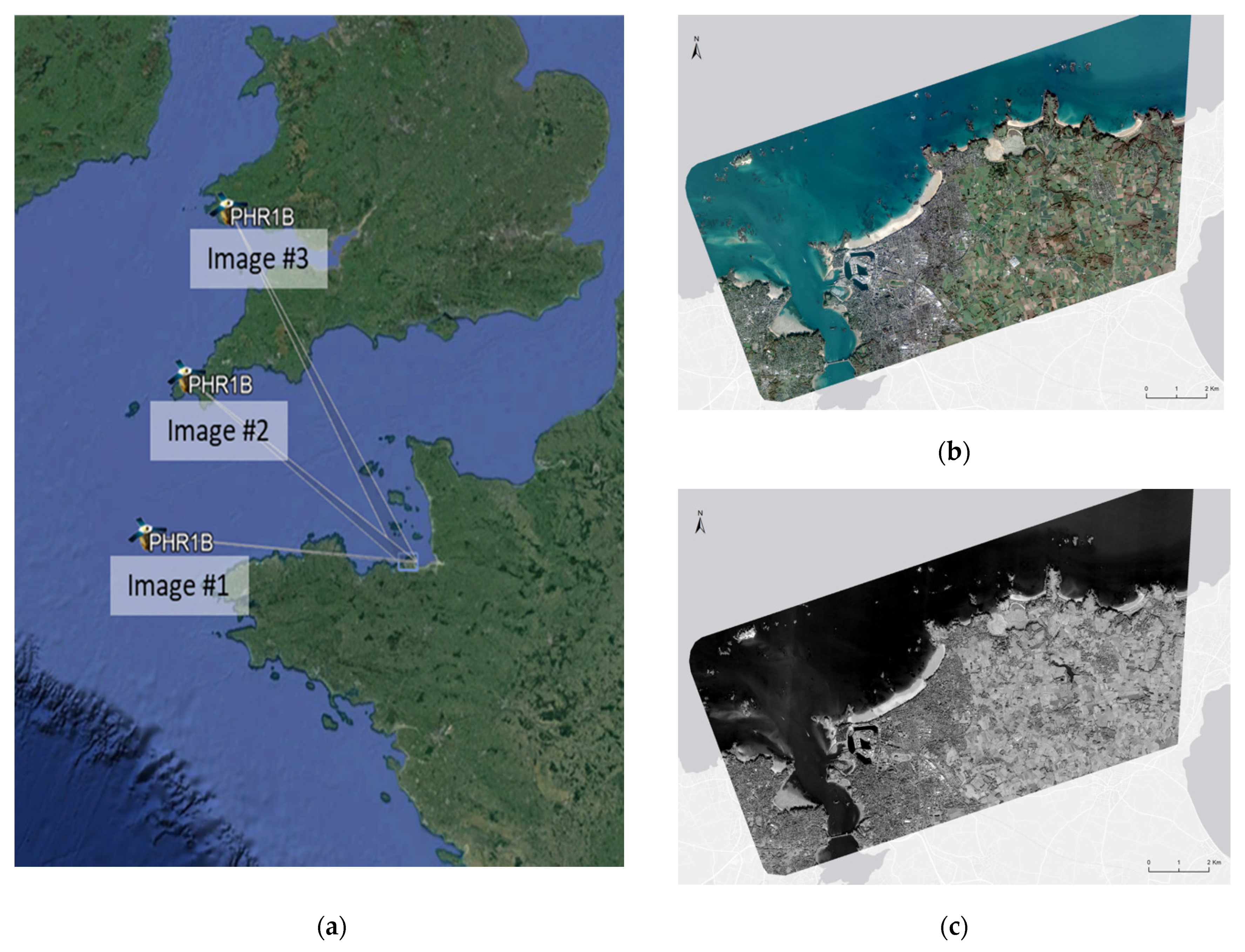
2.2. Pleiades–1 Satellite Imageries
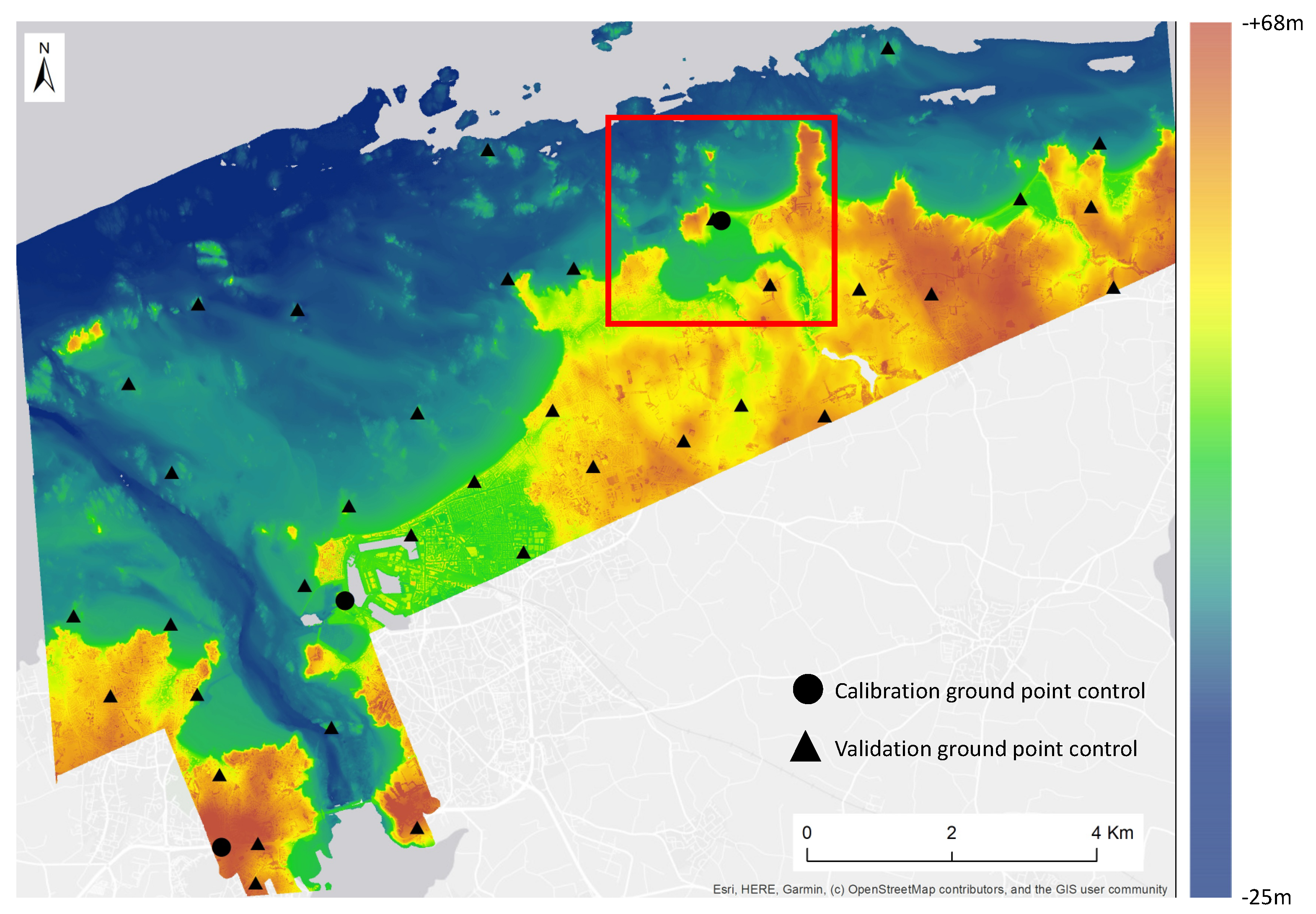
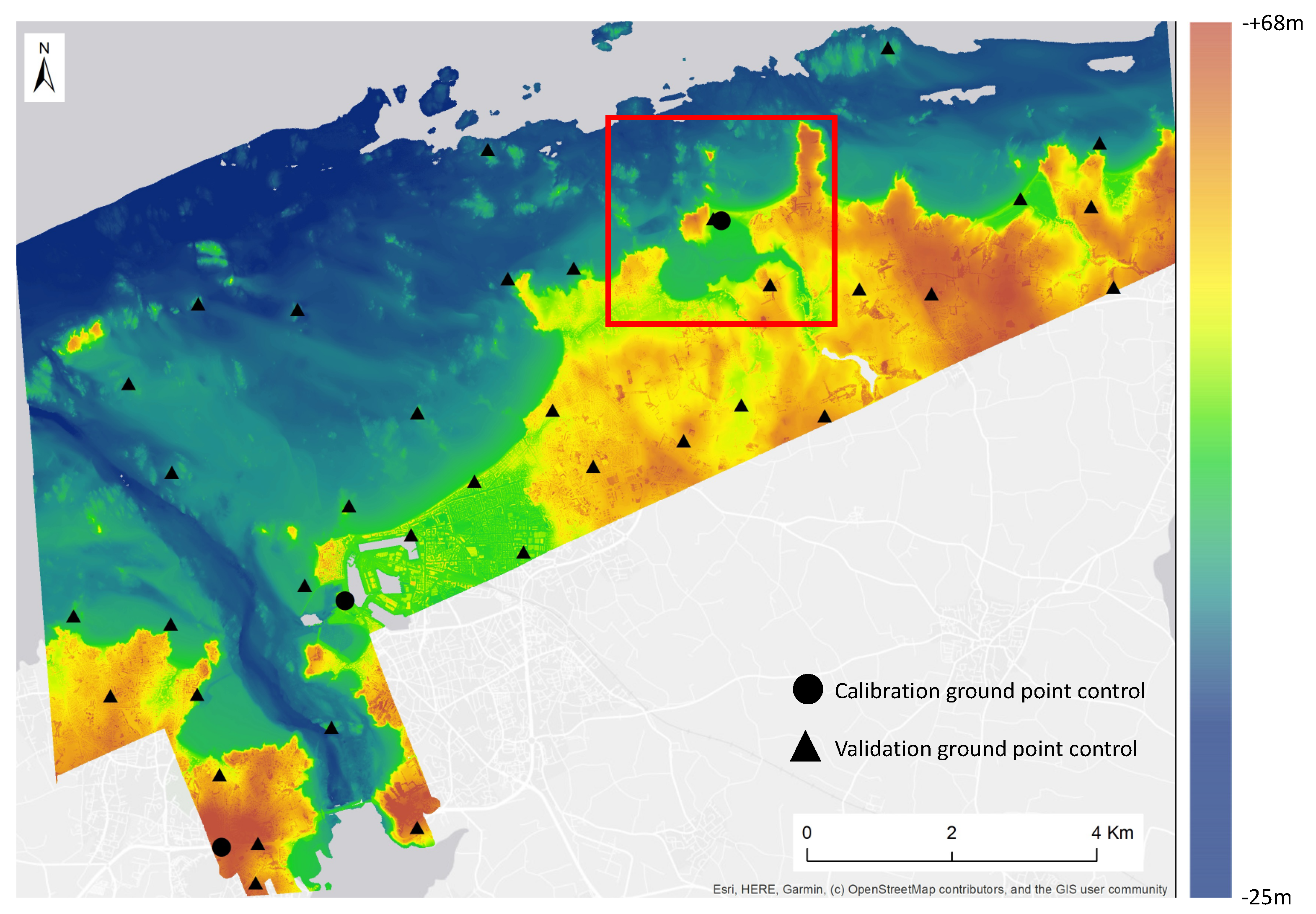
2.3. LiDAR Airborne Dataset
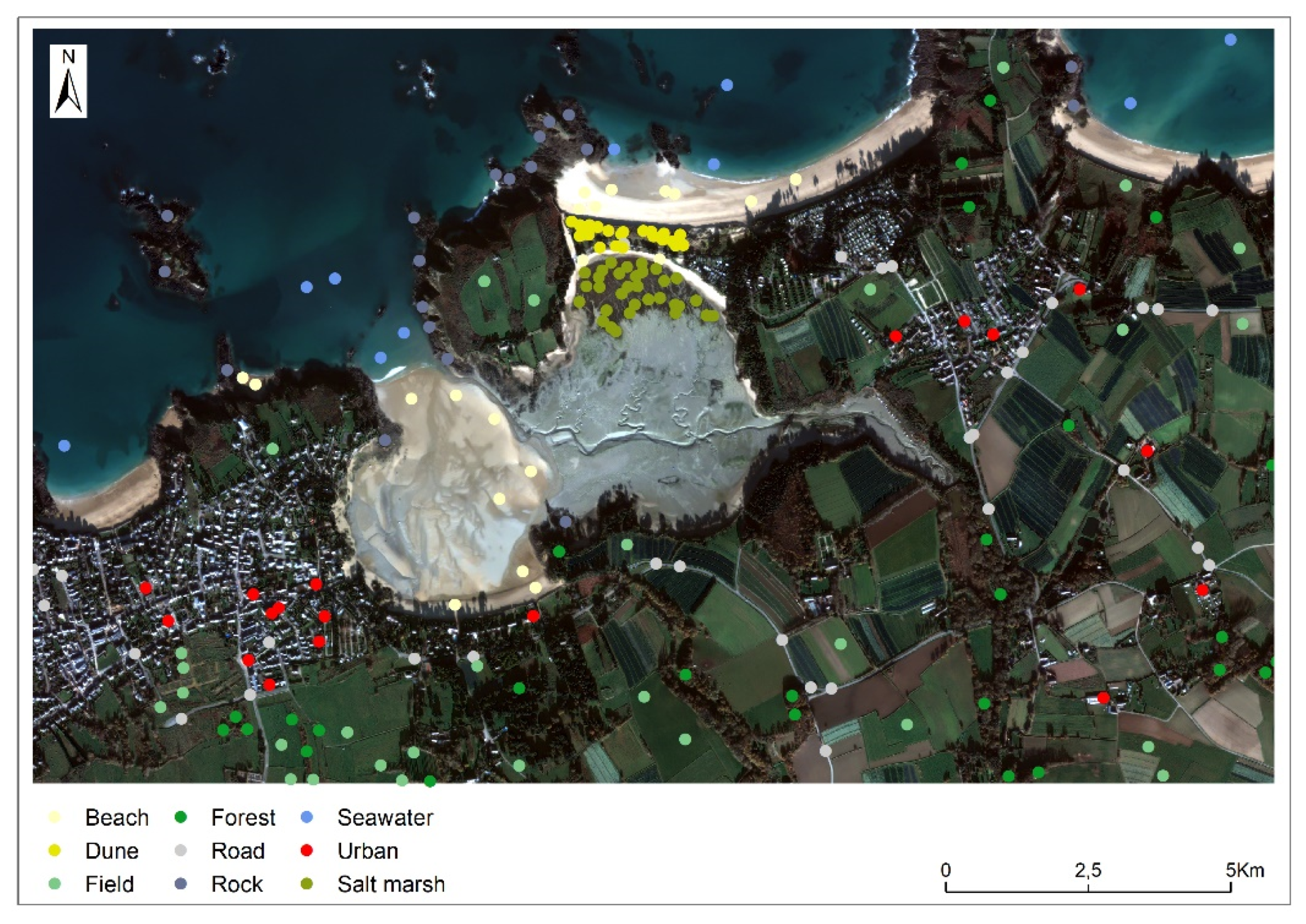
2.4. Coastal Landscape Classes
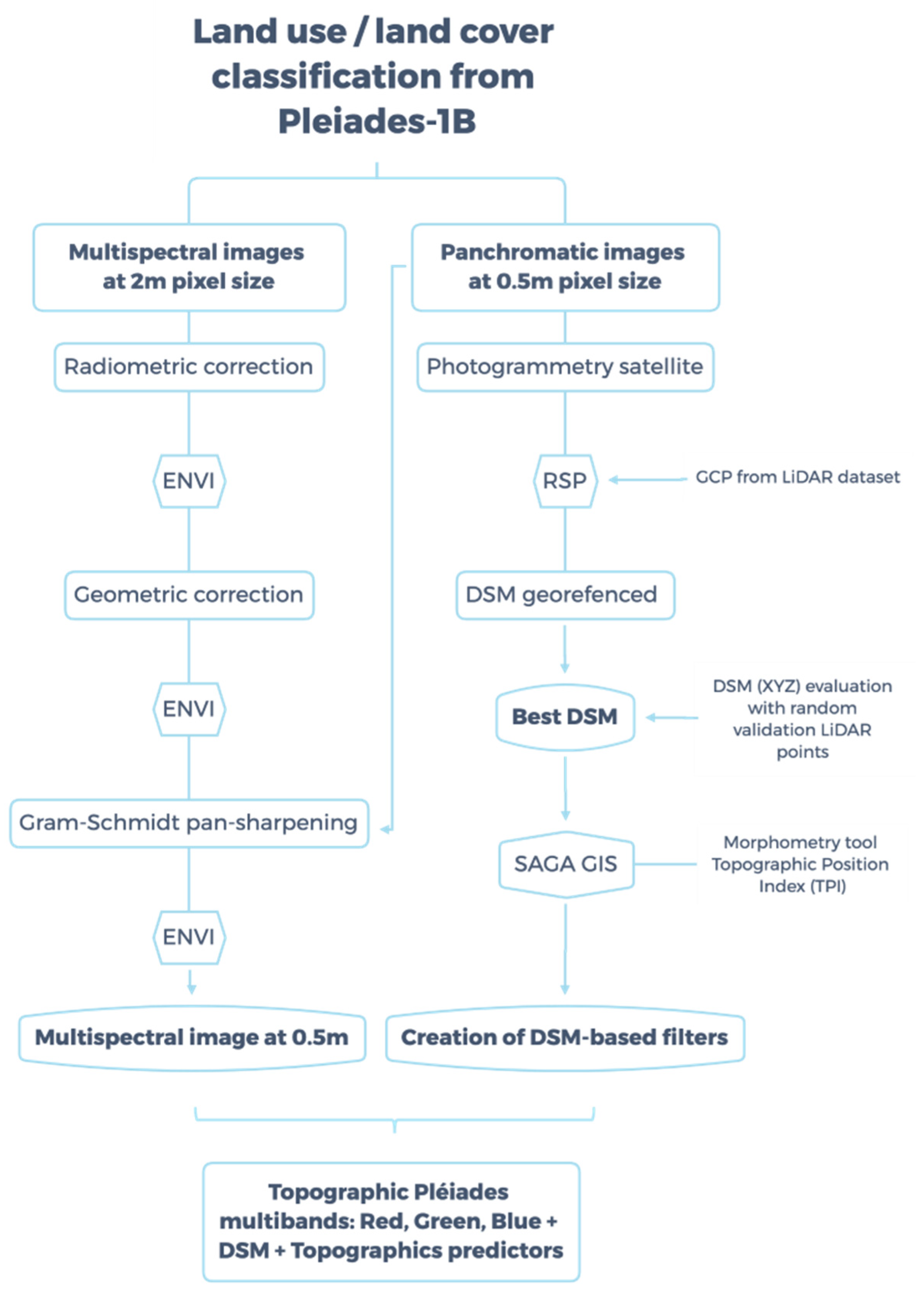
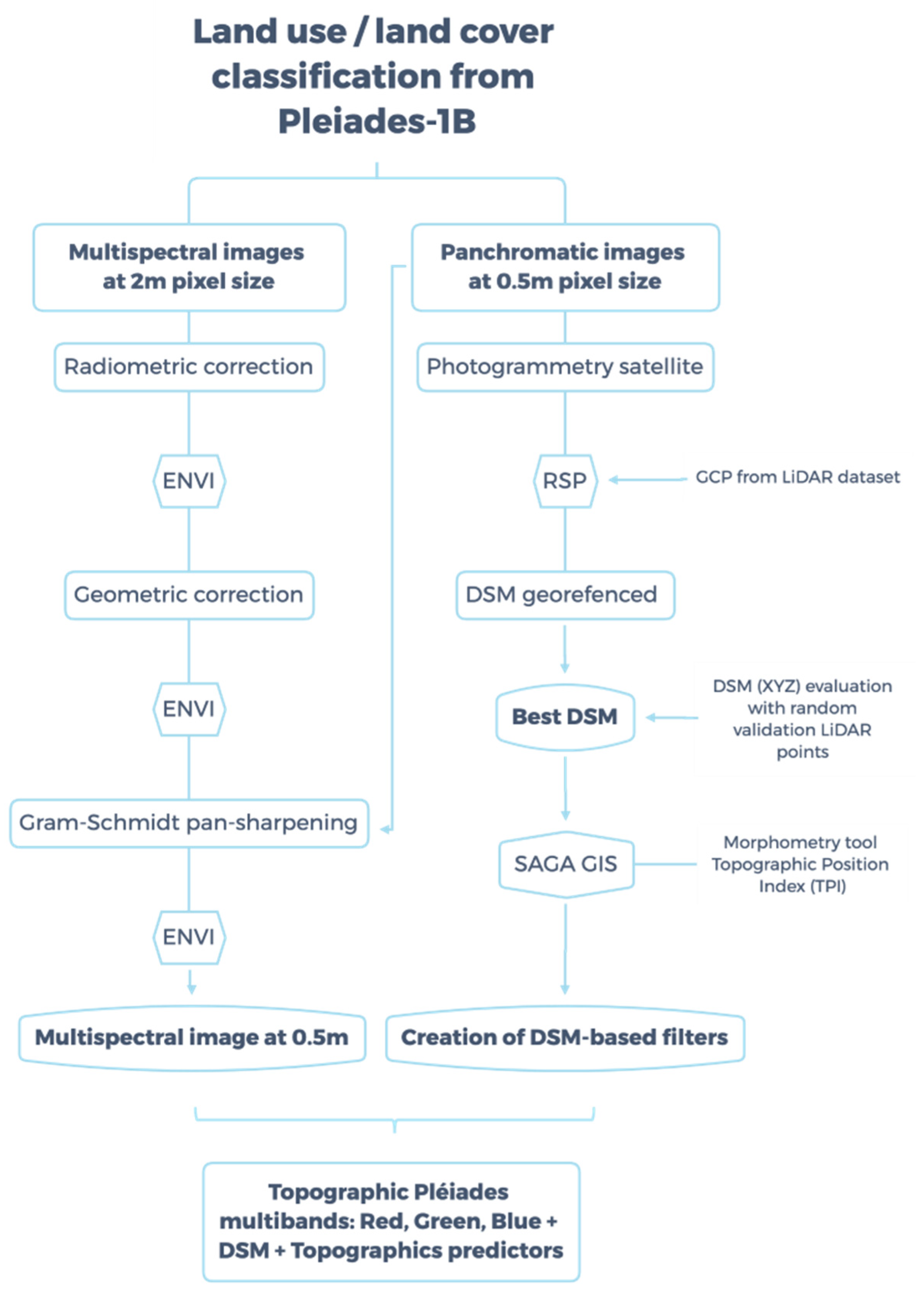
2.5. Satellite–Derived Topography: Photogrammetry Reconstruction
2.6. Satellite–Derived Morphometry
2.7. Classification Algorithm
3. Results
3.1. Pleiades–1 Digital Surface Model
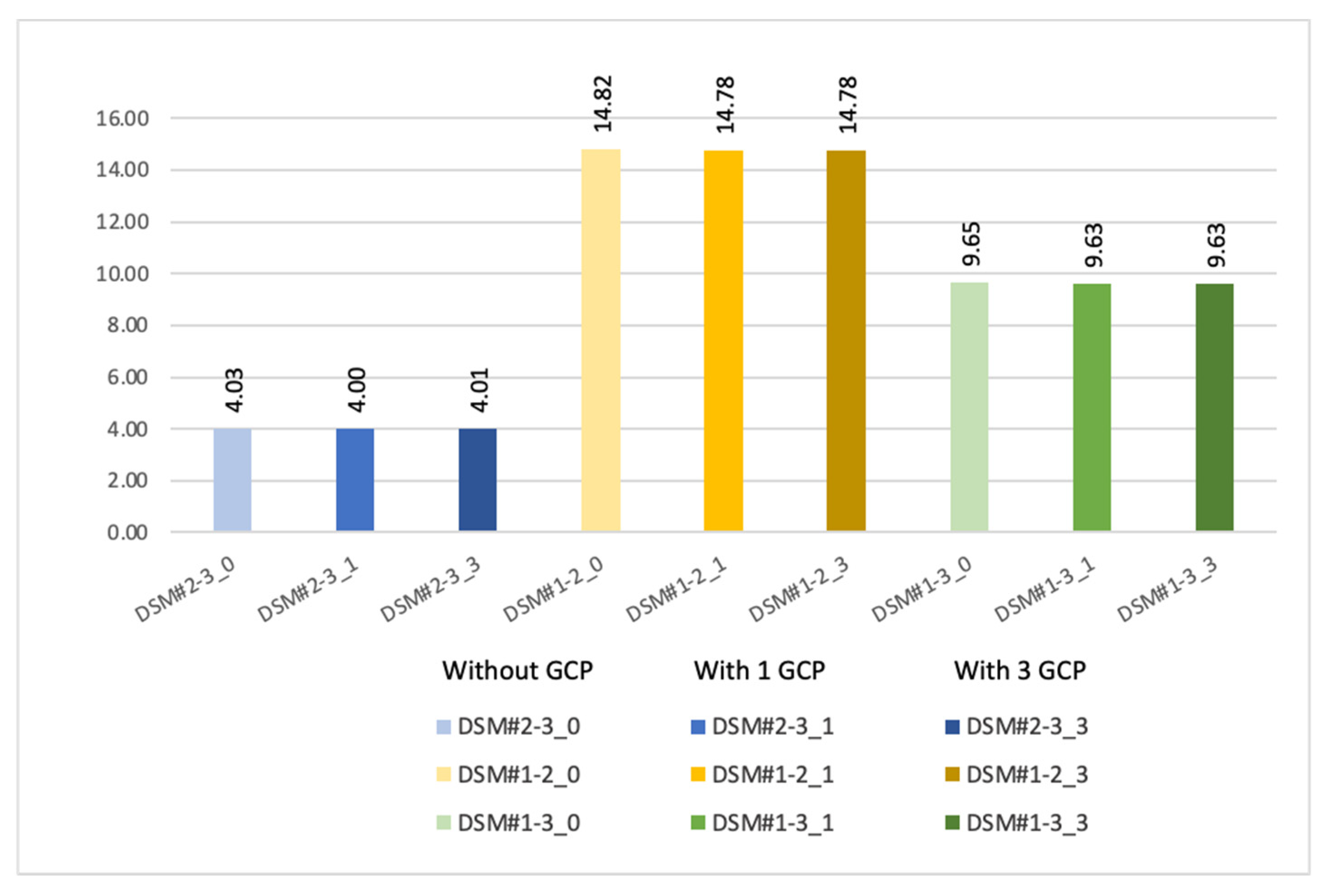
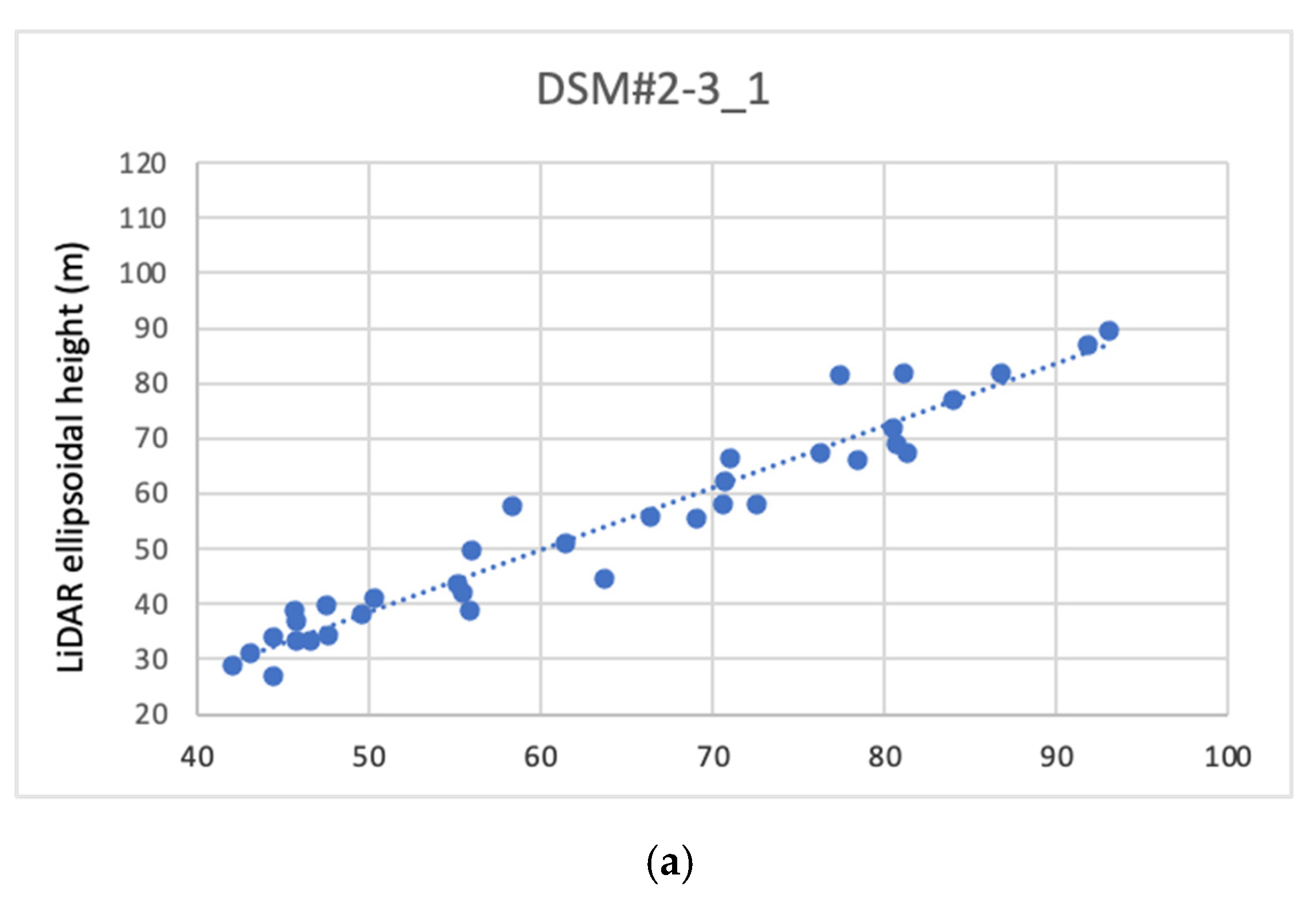
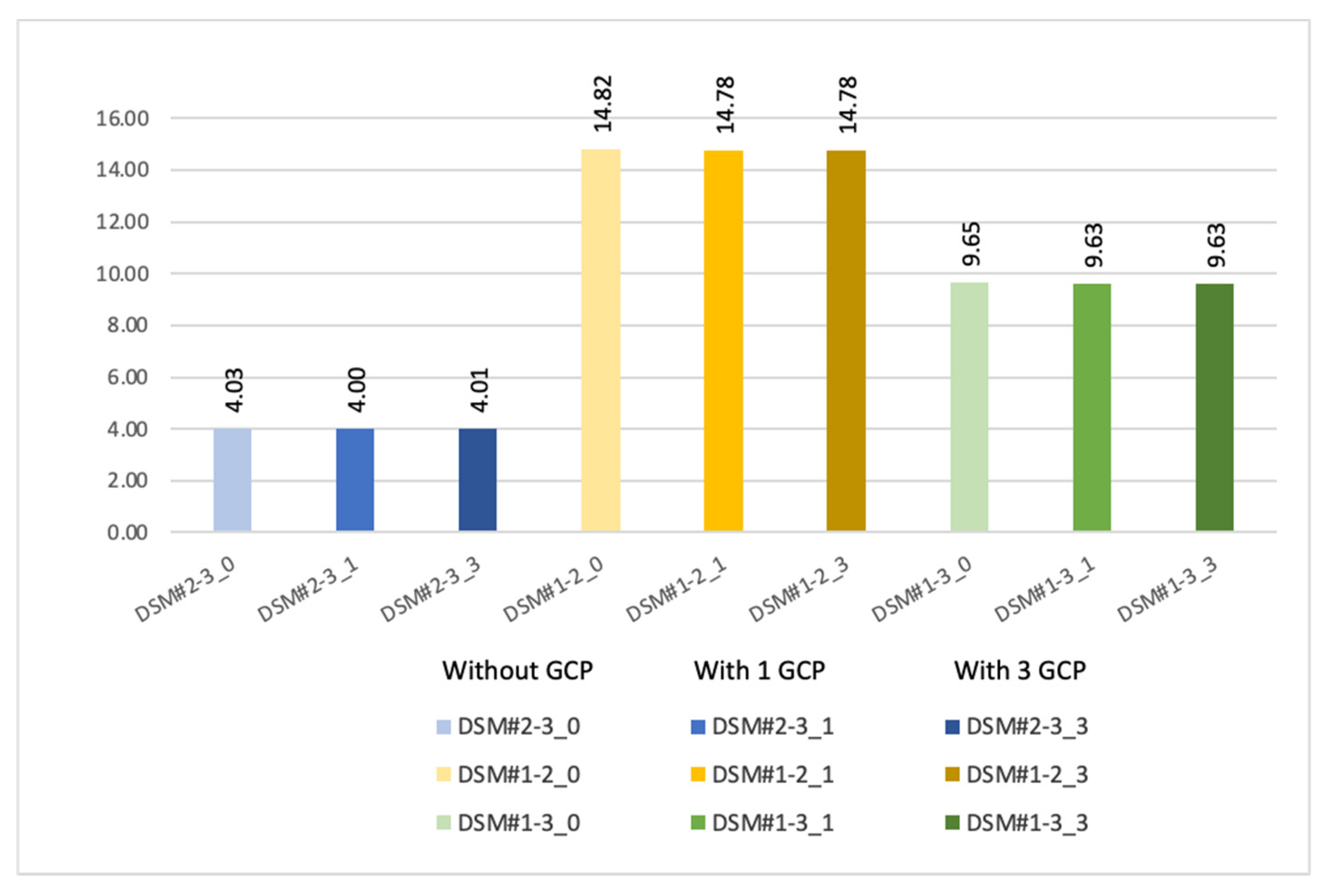
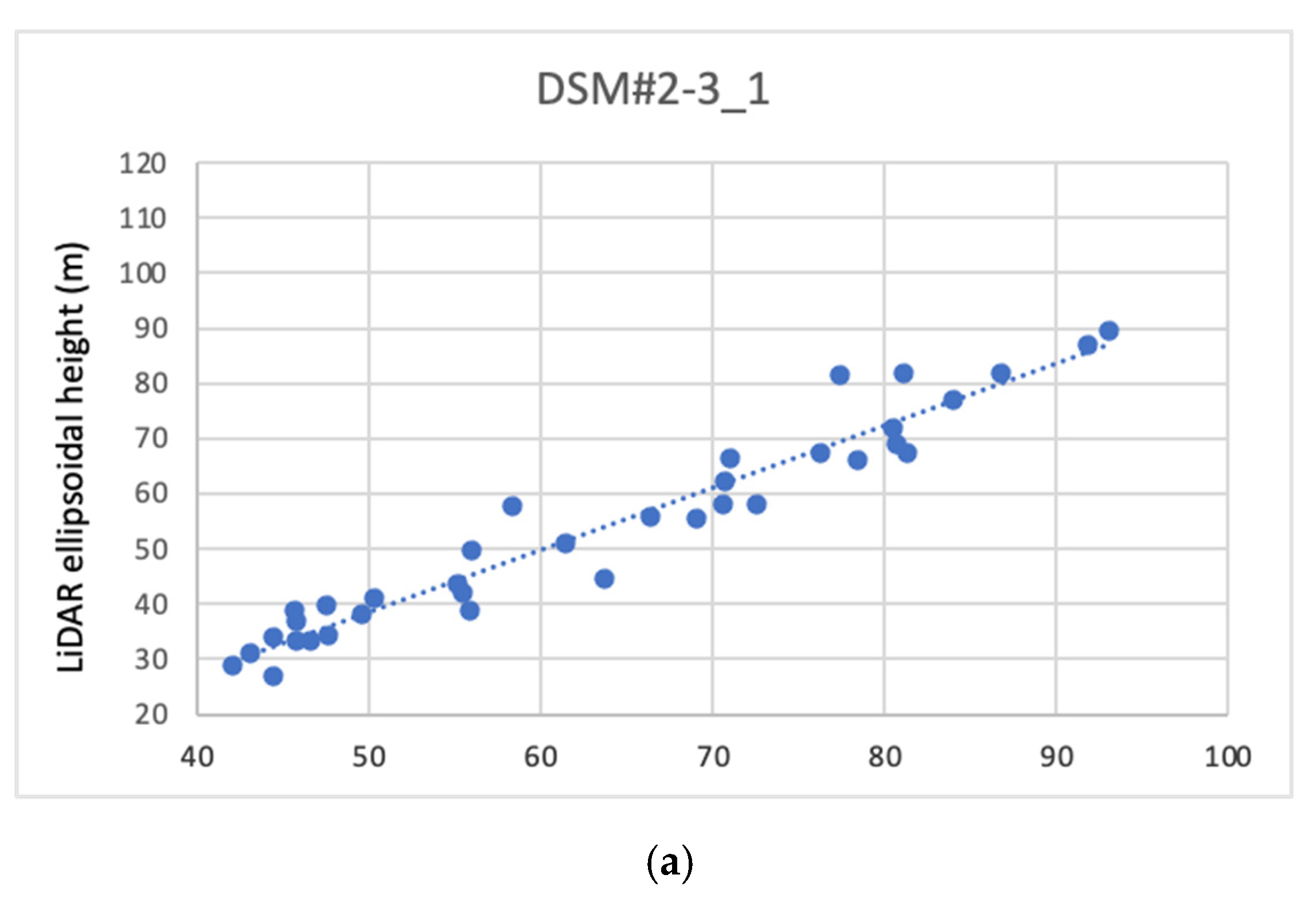
3.1.1. Global Evaluation
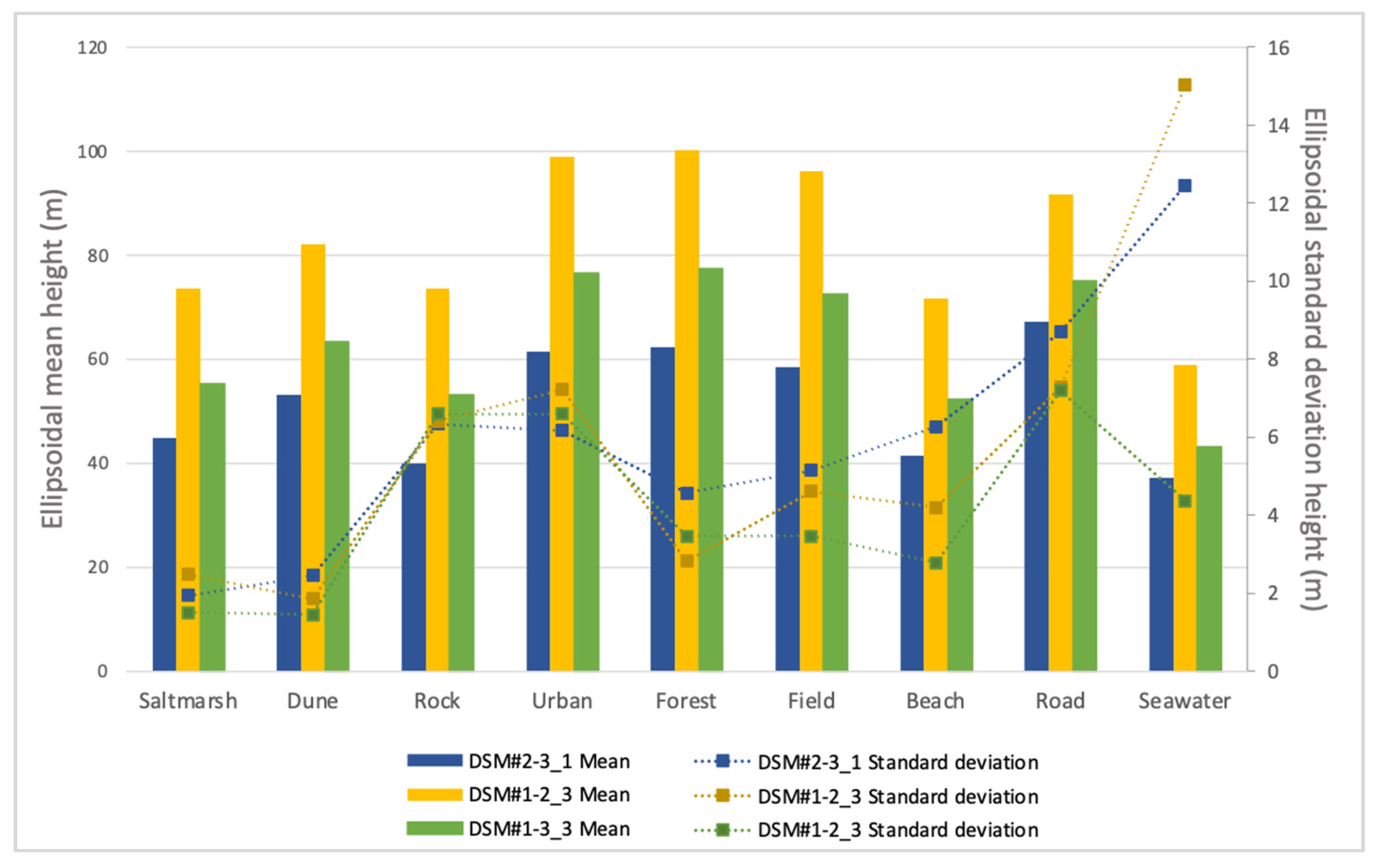
3.1.2. Class Level DSM Evaluation
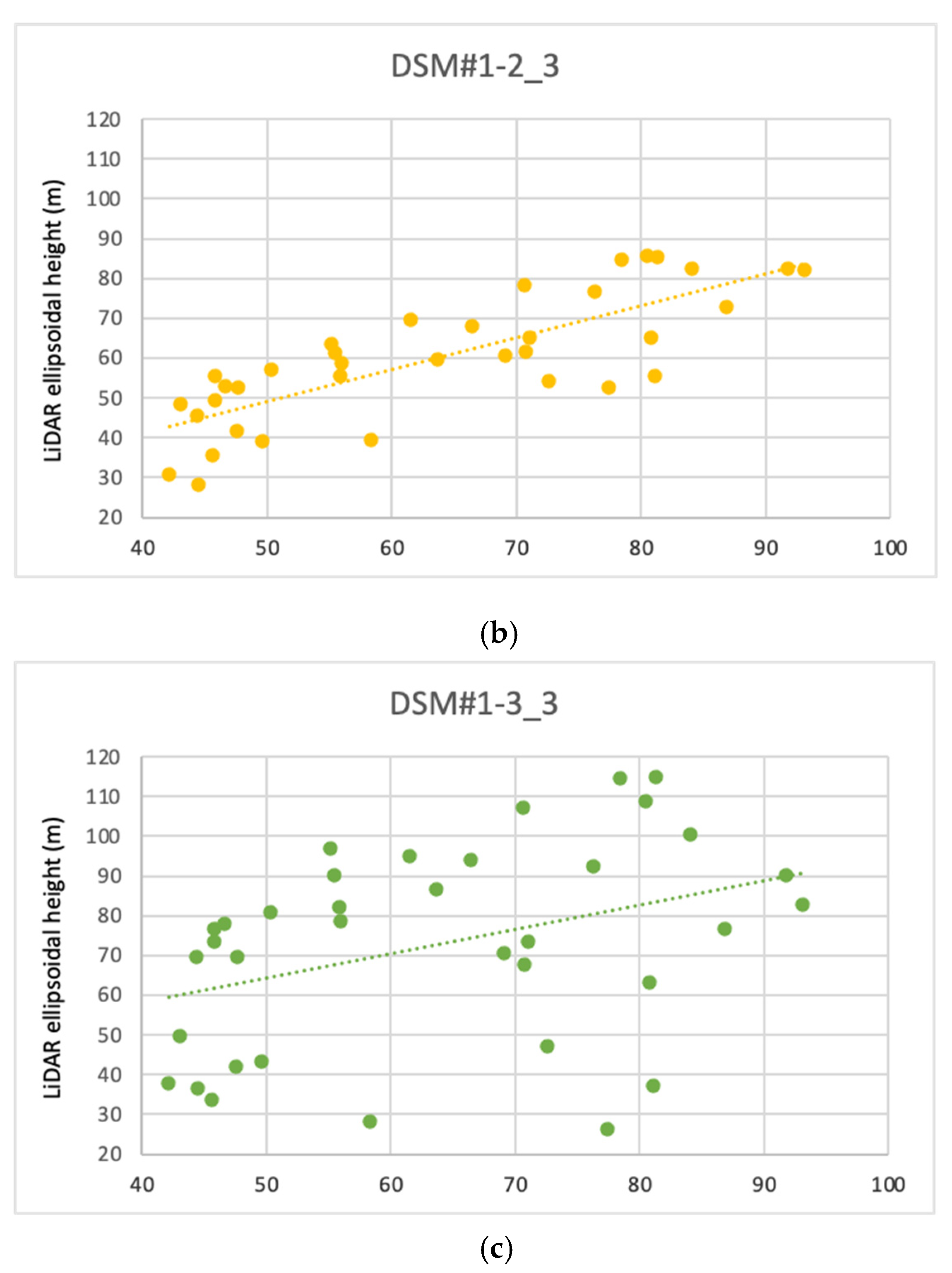
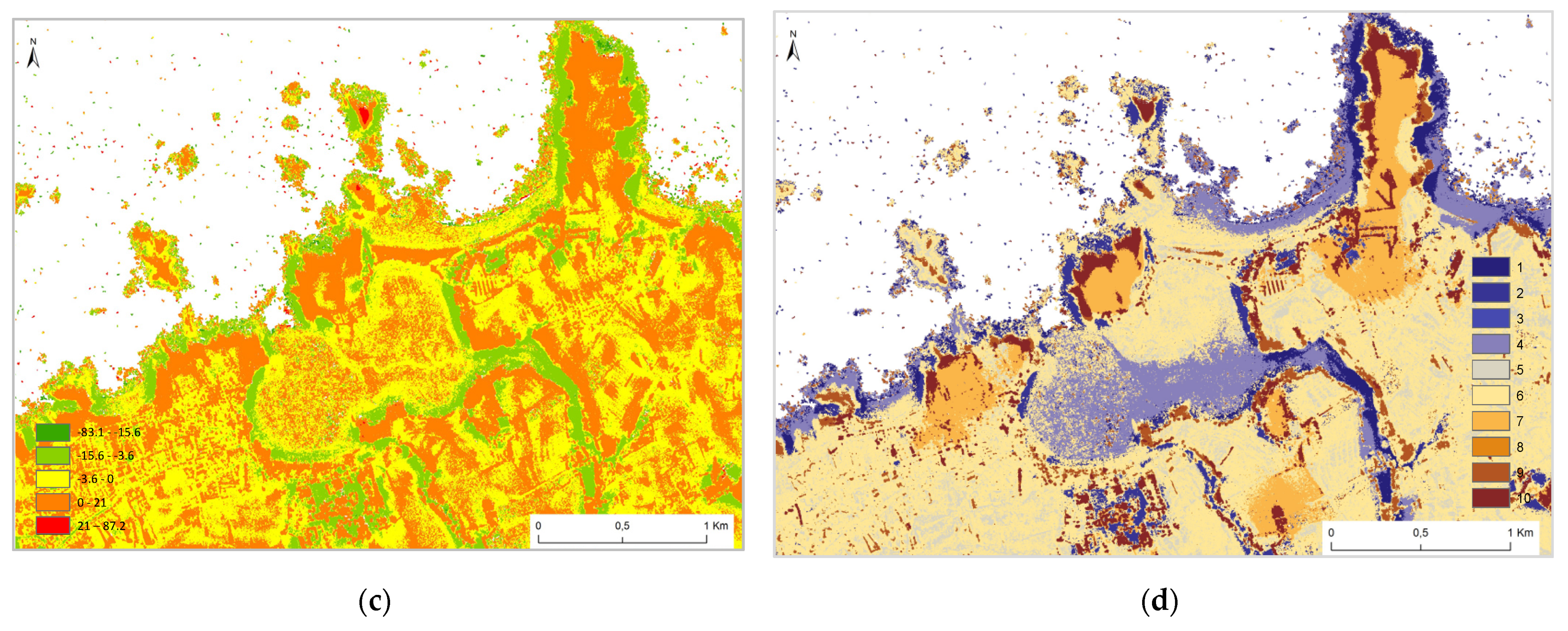
3.2. Morphometric Derivatives
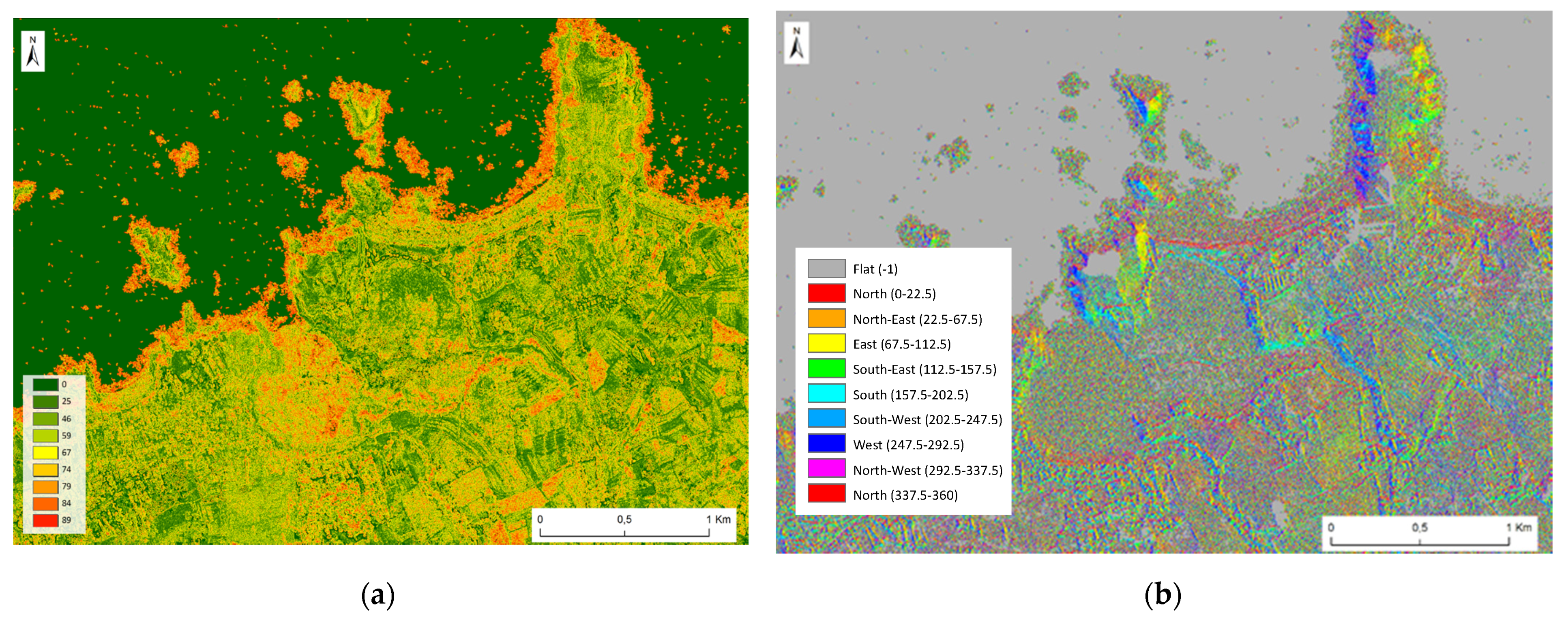
- The slope values ranged from 0 to 89°, with 0° corresponding to a flat surface such as the seawater or flatland (in green) and 89° corresponding to a steep cliff (in red in Figure 9a).
- The aspect is categorized in 10 classes from 0 to 360°, according to the main cardinal points (north, south, east, west; Figure 9b). A value of −1 corresponds to flat areas such as those for seawater.
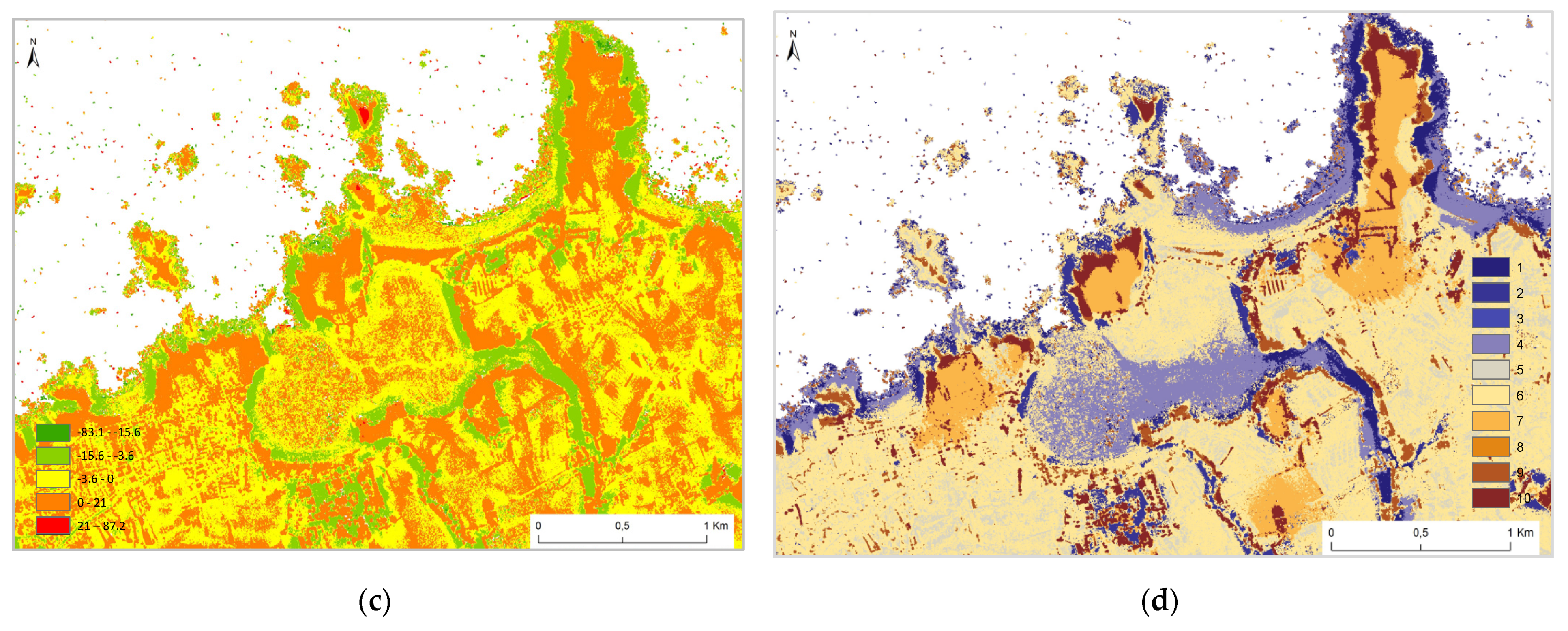
- TPI is the third morphometric contributor (Figure 9c).
- Finally, TPILC (Figure 9d) groups the landscapes into 10 classes (1 to 10).
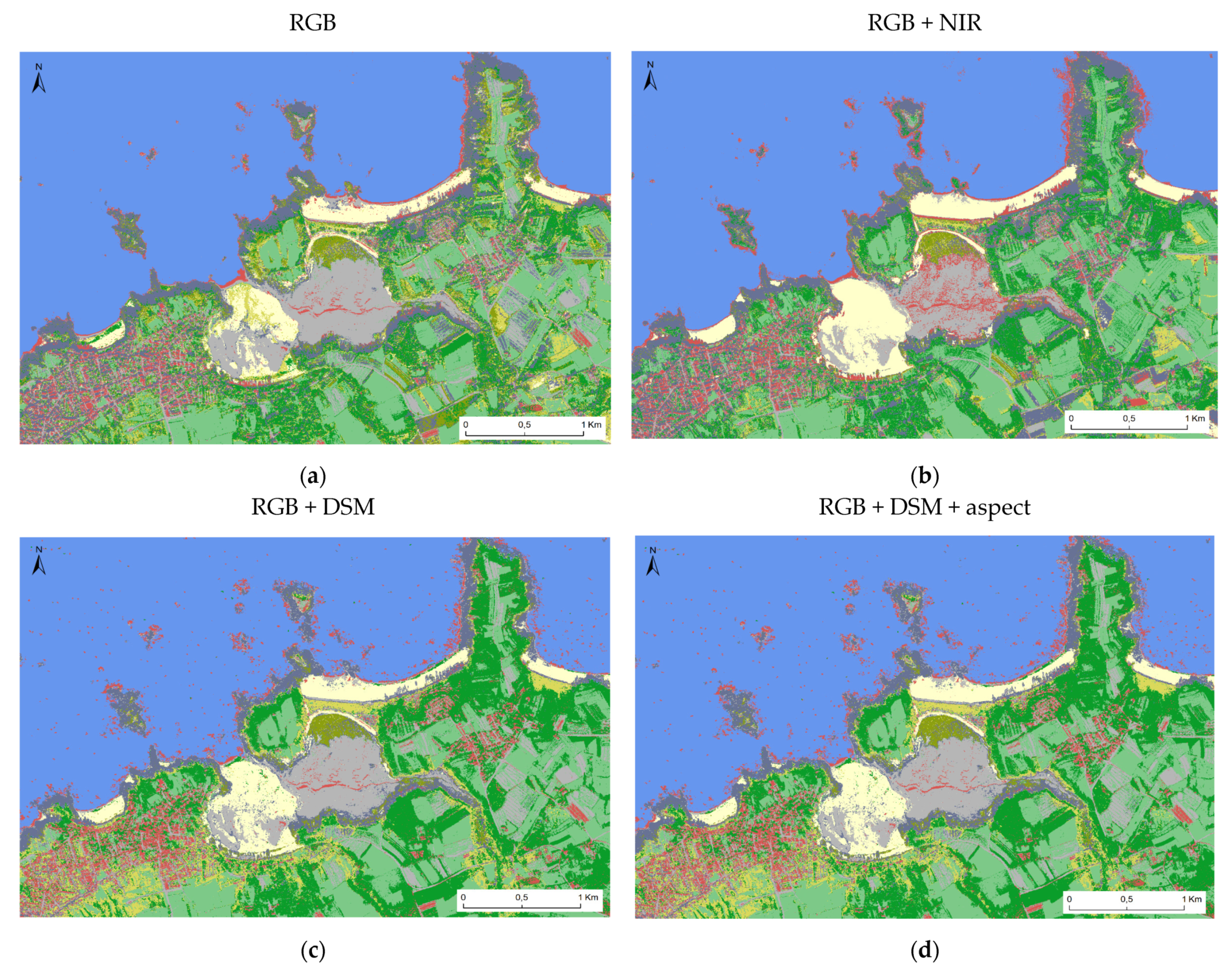
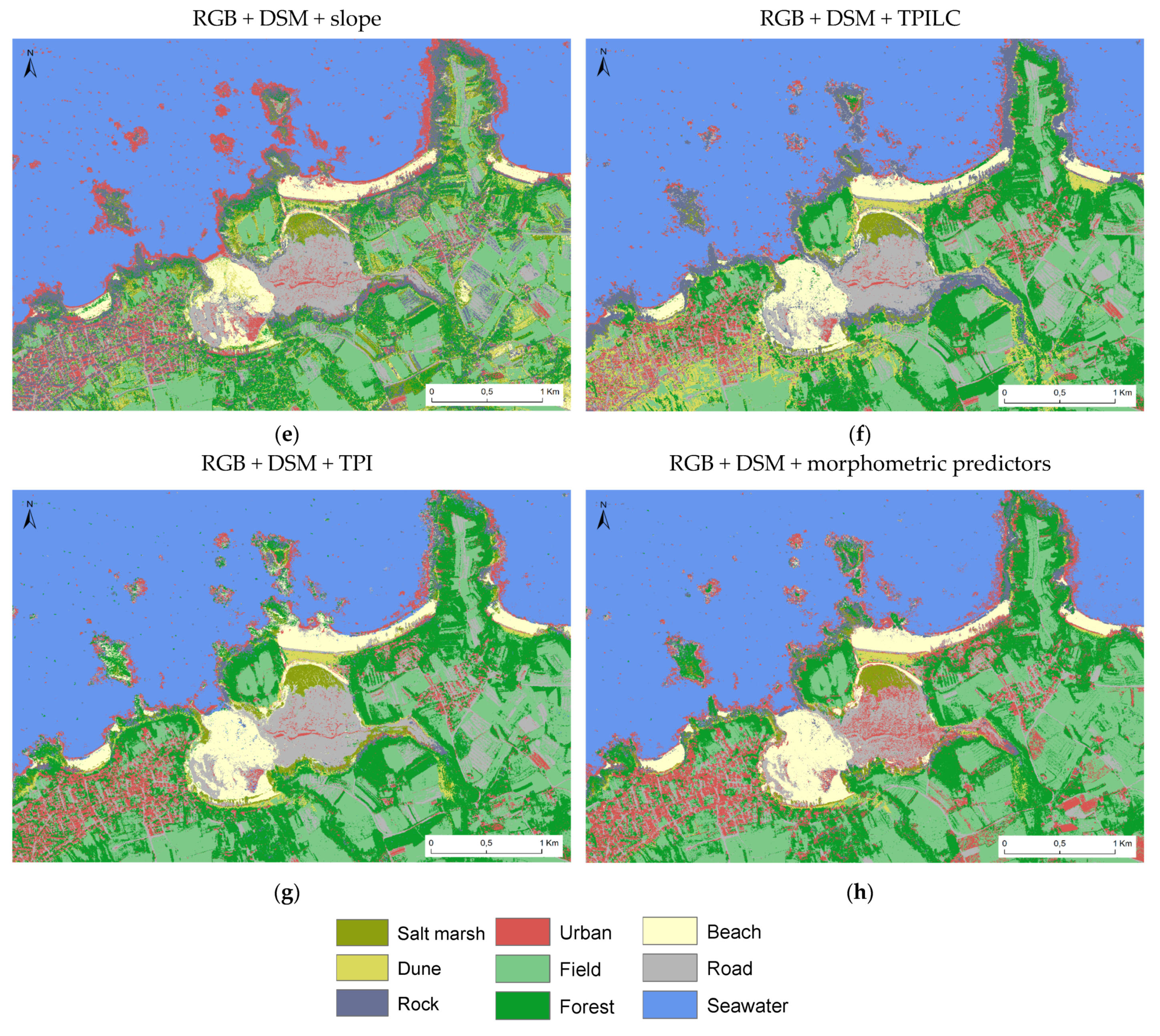
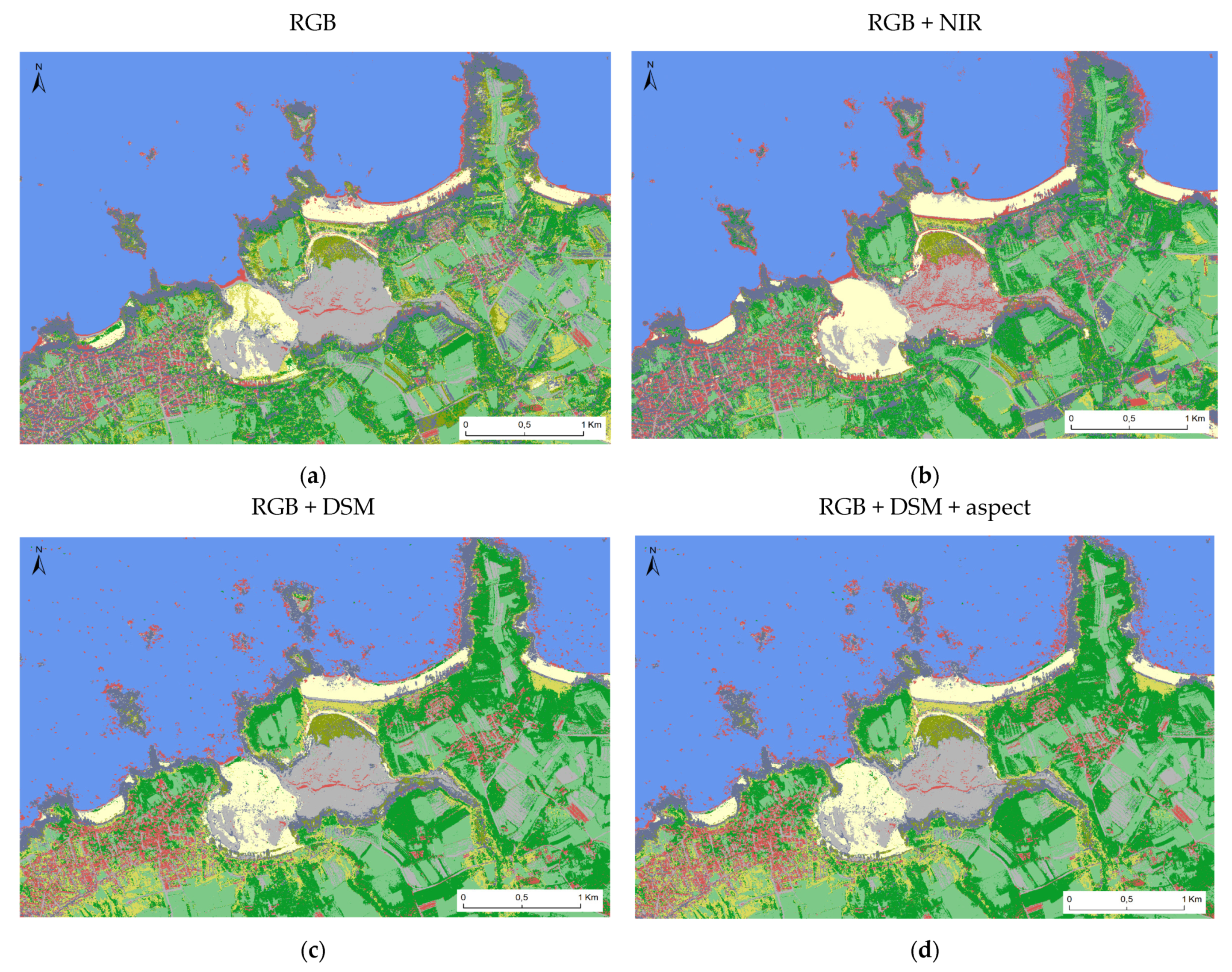
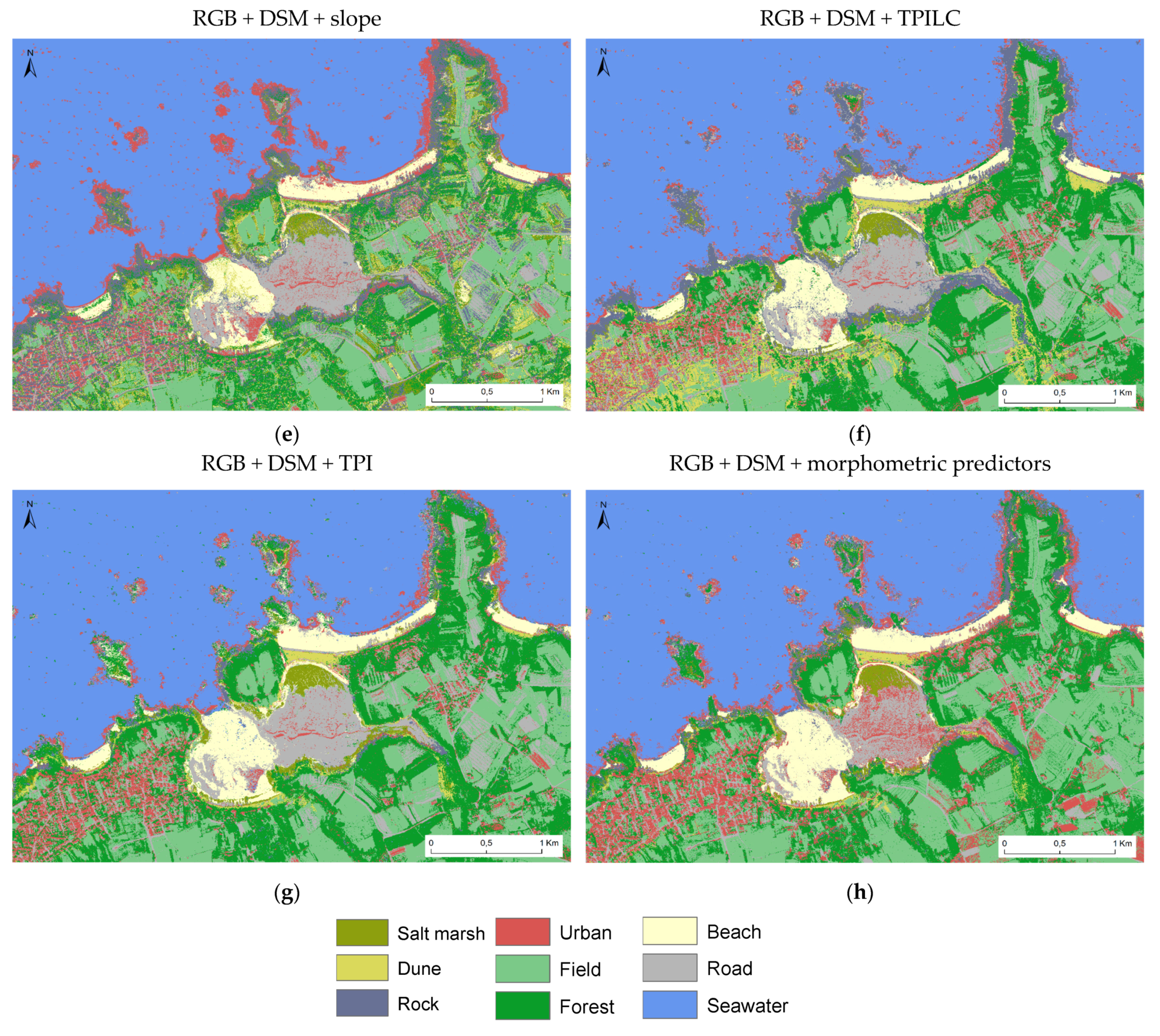
3.3. Pixel–Based Classification
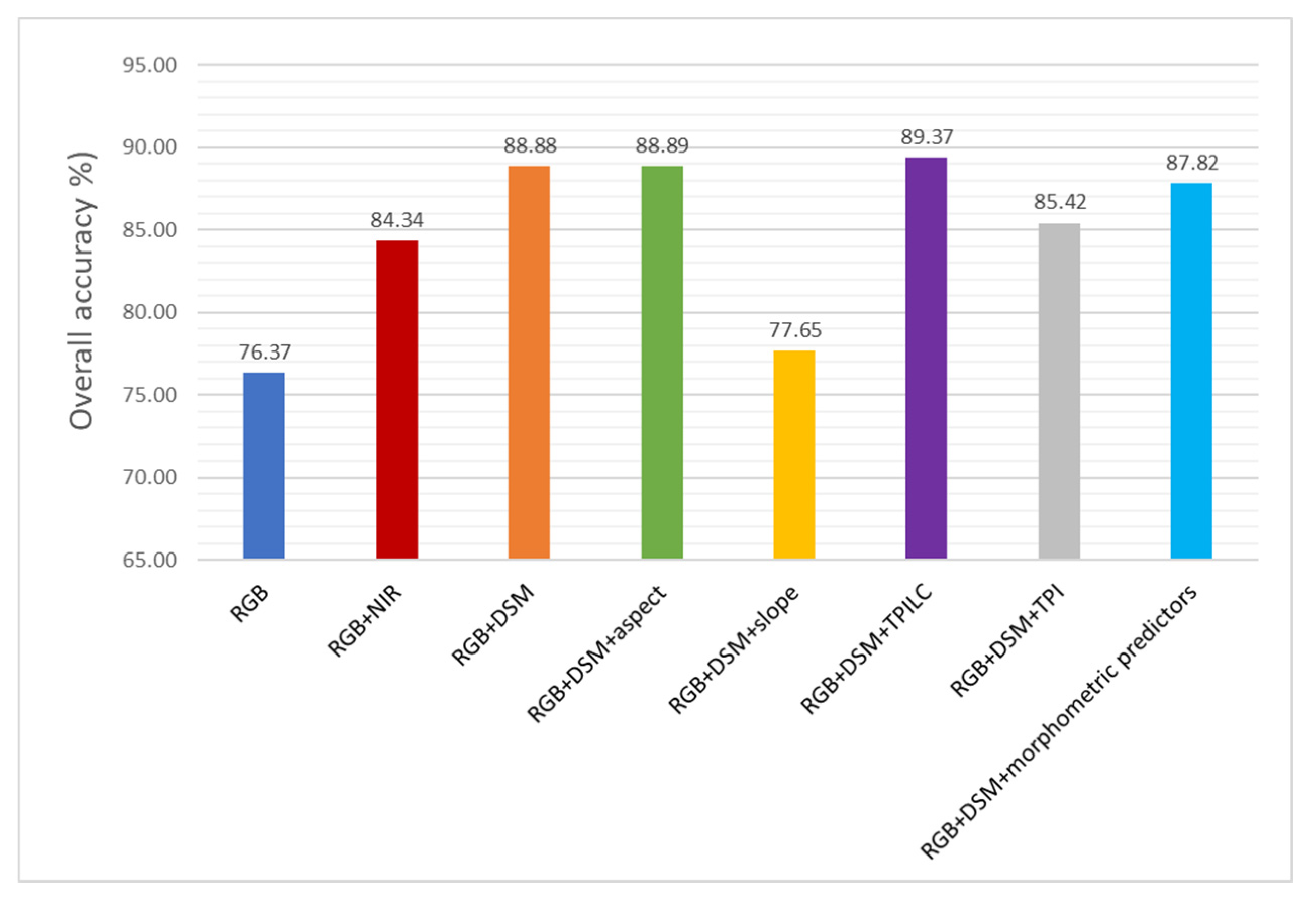
3.3.1. Overall Accuracy at the Landscape Scale
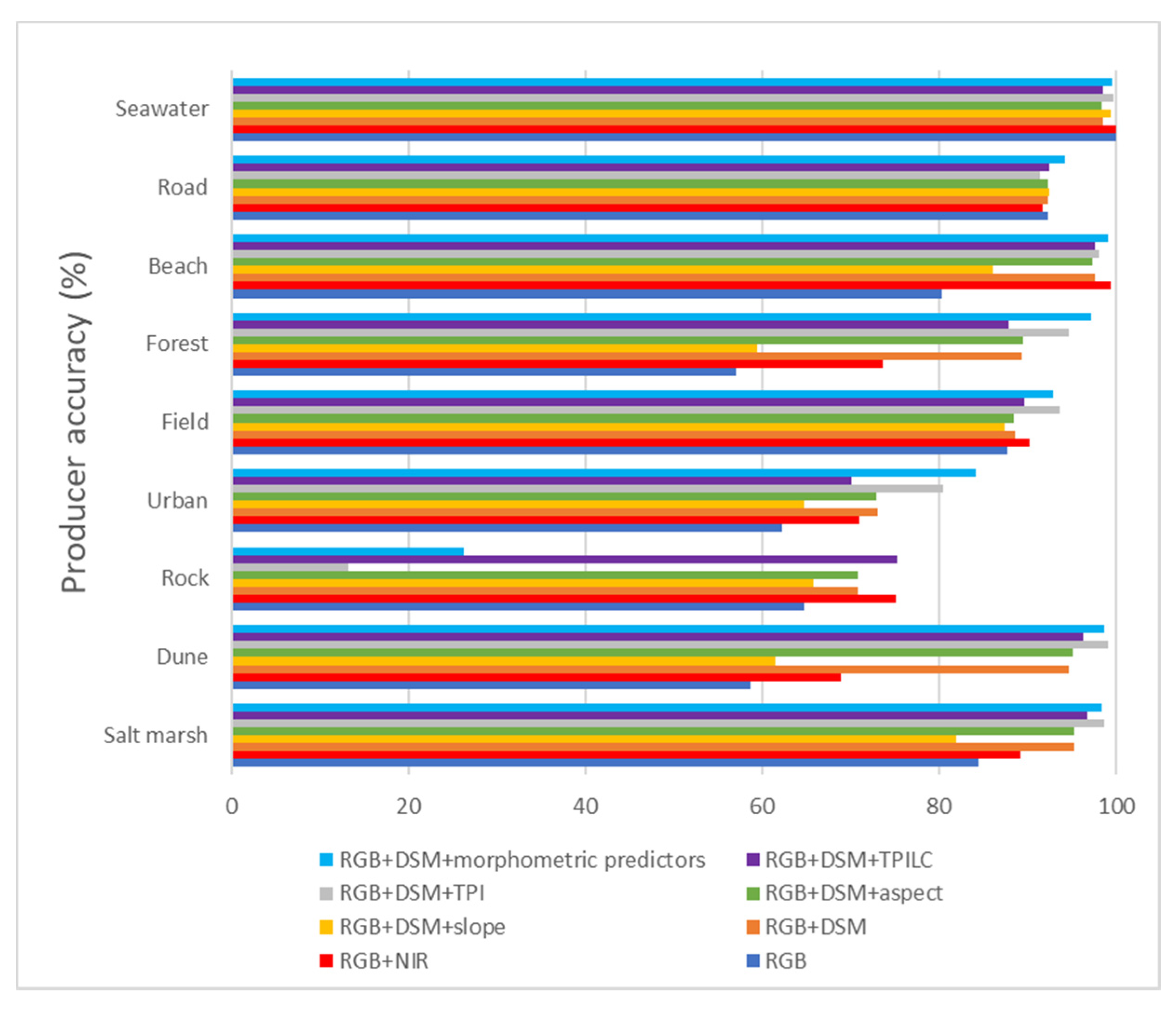
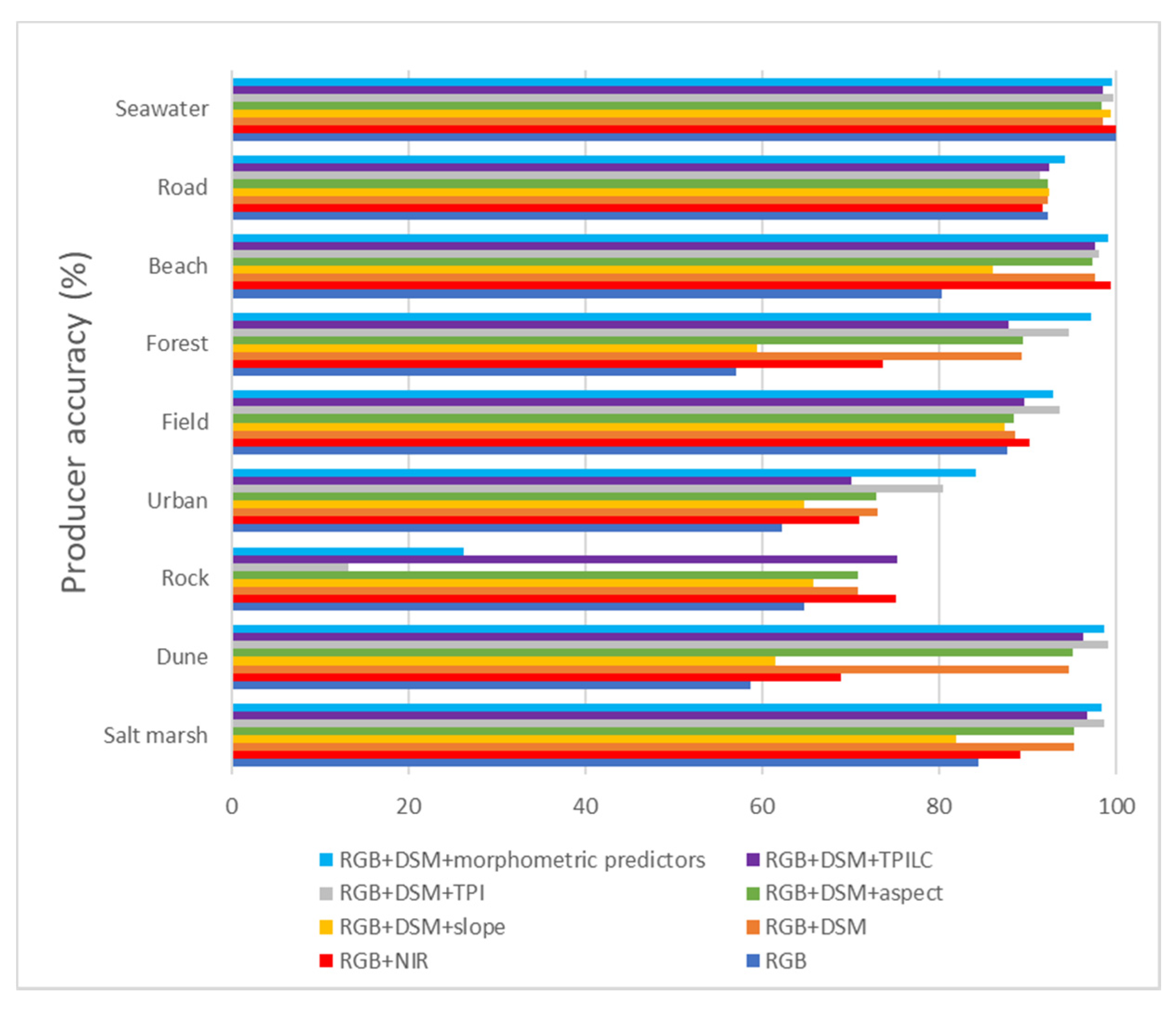
3.3.2. Evaluation at the Class Level
4. Discussion
4.1. Pleiades–1 Digital Surface Model
4.1.1. The Intersection Angle as a Key Determinant
4.1.2. Ground Control Point Effect
4.1.3. Information Reflected by the LiDAR Wavelengths
4.2. Topographic Contribution to Habitat Classification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, Z.; Lu, L.; Zhang, W.; Liu, W. AR6 Climate Change 2021: The Physical Science Basis; IPCC: Geneva, Switzerland, 2021. [Google Scholar]
- Mousavi, M.E.; Irish, J.L.; Frey, A.E.; Olivera, F.; Edge, B.L. Global warming and hurricanes: The potential impact of hurricane intensification and sea level rise on coastal flooding. Clim. Chang. 2010, 104, 575–597. [Google Scholar] [CrossRef]
- Collin, A.; James, D.; Jeanson, M. Mapping Tropical Coastal Social–Ecological Systems Using Unmanned Airborne Vehicle (UAV). In Marine Geological and Biological Habitat Mapping Geohab; 2019; Available online: https://hal.archives–ouvertes.fr/hal–02134739/document (accessed on 23 October 2021).
- Zanutta, A.; Lambertini, A.; Vittuari, L. UAV Photogrammetry and Ground Surveys as a Mapping Tool for Quickly Monitoring Shoreline and Beach Changes. J. Mar. Sci. Eng. 2020, 8, 52. [Google Scholar] [CrossRef] [Green Version]
- James, D.; Collin, A.; Mury, A.; Letard, M.; Guillot, B. UAV Multispectral Optical Contribution to Coastal 3D Modelling. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7951–7954. [Google Scholar]
- Collin, A.; Dubois, S.; Ramambason, C.; Etienne, S. Very high–resolution mapping of emerging biogenic reefs using airborne optical imagery and neural network: The honeycomb worm (Sabellaria alveolata) case study. Int. J. Remote Sens. 2018, 39, 5660–5675. [Google Scholar] [CrossRef] [Green Version]
- Ishiguro, S.; Yamada, K.; Yamakita, T.; Yamano, H.; Oguma, H.; Matsunaga, T. Classification of Seagrass Beds by Coupling Airborne LiDAR Bathymetry Data and Digital Aerial Photographs. Landsc. Ecol. Asian Cult. 2016, 59–70. [Google Scholar] [CrossRef]
- Collin, A.M.; Andel, M.; James, D.; Claudet, J. The superspectral/hyperspatial worldview–3 as the link between spaceborne hyperspectral and airborne hyperspatial sensors: The case study of the complex tropical coast. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII–2/W13, 1849–1854. [Google Scholar] [CrossRef] [Green Version]
- Collin, A.; Archambault, P.; Planes, S. Bridging Ridge–to–Reef Patches: Seamless Classification of the Coast Using Very High Resolution Satellite. Remote Sens. 2013, 5, 3583–3610. [Google Scholar] [CrossRef] [Green Version]
- Satellite Imaging Corporation. Available online: https://www.satimagingcorp.com/satellite–sensors/ (accessed on 30 October 2021).
- James, D.; Collin, A.; Mury, A.; Costa, S. Very high resolution land use and land cover mapping using pleiades–1 stereo im–agery and machine learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 675–682. [Google Scholar] [CrossRef]
- James, D.; Collin, A.; Mury, A.; Letard, M. Enhancing uav coastal mapping using infrared pansharpening. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII–B3–2, 257–264. [Google Scholar] [CrossRef]
- Archer, A.W. World’s highest tides: Hypertidal coastal systems in North America, South America and Europe. Sediment. Geol. 2013, 284, 1–25. [Google Scholar] [CrossRef]
- Airbus. Available online: https://www.intelligence–airbusds.com/imagery/constellation/pleiades/ (accessed on 30 October 2021).
- Qin, R. Rpc stereo processor (rsp)—A software package for digital surface model and orthophoto generation from satellite stereo imagery. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 77. [Google Scholar] [CrossRef] [Green Version]
- Saga Gis. Available online: http://www.saga–gis.org/ (accessed on 17 October 2021).
- Weiss, A.D. Topographic position and landforms analysis. In Proceedings of the Poster Presentation, ESRI Users Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- Guisan, A.; Weiss, S.B.; Weiss, A.D. GLM versus CCA spatial modeling of plant species distribution. Plant Ecol. 1999, 143, 107–122. [Google Scholar] [CrossRef]
- Harris Geospatial. Available online: https://www.l3harrisgeospatial.com/Software–Technology/ENVI (accessed on 21 July 2021).
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Qui, R. A Critical Analysis of Satellite Stereo Pairs for Digital Surface Model Generation and A Matching Quality Prediction Model. ISPRS J. Photogramm. Remote Sens. 2019, 154, 139–150. [Google Scholar]
- Poli, D.; Remondino, F.; Angiuli, E.; Agugiaro, G. Evaluation of pleiades–1a triplet on trento testfield. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL–1/W1, 287–292. [Google Scholar] [CrossRef] [Green Version]
- Collin, A.; Hench, J.L.; Pastol, Y.; Planes, S.; Thiault, L.; Schmitt, R.J.; Holbrook, S.J.; Davies, N.; Troyer, M. High resolution topobathymetry using a Pleiades–1 triplet: Moorea Island in 3D. Remote Sens. Environ. 2018, 208, 109–119. [Google Scholar] [CrossRef]
- Bernard, M.; Decluseau, D.; Gabet, L.; Nonin, P. 3D capabilities of pleiades satellite. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX–B3, 553–557. [Google Scholar] [CrossRef] [Green Version]
- Panagiotakis, E.; Chrysoulakis, N.; Charalampopoulou, V.; Poursanidis, D. Validation of Pleiades Tri–Stereo DSM in Urban Areas. ISPRS Int. J. Geo Inf. 2018, 7, 118. [Google Scholar] [CrossRef] [Green Version]
- Pichon, L.; Ducanchez, A.; Fonta, H.; Tisseyre, B. Quality of digital elevation models obtained from unmanned aerial vehicles for precision viticulture. OENO One 2016, 50, 3. [Google Scholar] [CrossRef] [Green Version]
- Rupnik, E.; Deseilligny, M.P.; Delorme, A.; Klinger, Y. Refined satellite image orientation in the free open–source photogram–metric tools Apero/Micmac. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 83. [Google Scholar] [CrossRef] [Green Version]
- Letard, M.; Collin, A.; Lague, D.; Corpetti, T.; Pastol, Y.; Ekelund, A.; Pergent, G.; Costa, S. Towards 3D Mapping of Seagrass Meadows with Topo–Bathymetric Lidar Full Waveform Processing. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 8069–8072. [Google Scholar] [CrossRef]
- Farid, A.; Rautenkranz, D.; Goodrich, D.C.; Marsh, S.E.; Sorooshian, S. Riparian vegetation classification from airborne laser scanning data with an emphasis on cottonwood trees. Can. J. Remote Sens. 2006, 32, 15–18. [Google Scholar] [CrossRef]
- Lee, D.G.; Shin, Y.H.; Lee, D.C. Land Cover Classification Using SegNet with Slope, Aspect, and Multidirectional Shaded Relief Images Derived from Digital Surface Model. J. Sens. 2020, 2020, 8825509. [Google Scholar] [CrossRef]
- James, D.; Collin, A.; Houet, T.; Mury, A.; Gloria, H.; Le Poulain, N. Towards Better Mapping of Seagrass Meadows using UAV Multispectral and Topographic Data. J. Coast. Res. 2020, 95, 1117–1121. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Image #1 | Image #2 | Image #3 |
|---|---|---|---|
| Acquisition date | 28 November 2020 | 28 November 2020 | 28 November 2020 |
| Time | 11 h 26 min 14 s | 11 h 26 min 24 s | 11 h 26 min 32 s |
| Image orientation angle (in degree) | 180.01 | 180.03 | 180.01 |
| Incidence angle (in degrees) | 16.41 | 15.35 | 16.05 |
| Sun azimuth (in degree) | 172.60 | 172.60 | 172.60 |
| Sun elevation (in degree) | 19.77 | 19.77 | 19.77 |
| Class Name | Thumbnail |
|---|---|
| Dune |  |
| Salt marsh |  |
| Rock |  |
| Urban |  |
| Forest |  |
| Field |  |
| Beach |  |
| Road |  |
| Seawater |  |
| Salt Marsh | Dune | Rock | Urban | Field | Forest | Beach | Road | Seawater | |
|---|---|---|---|---|---|---|---|---|---|
| RGB | 84.47 | 58.67 | 64.8 | 62.27 | 87.67 | 57 | 80.27 | 92.27 | 100 |
| RGB + NIR | 89.13 | 68.93 | 75.07 | 71 | 90.27 | 73.67 | 99.4 | 91.67 | 100 |
| RGB + DSM | 95.2 | 94.67 | 70.8 | 73 | 88.6 | 89.27 | 97.67 | 92.33 | 98.47 |
| RGB + DSM + slope | 82 | 61.47 | 65.8 | 64.73 | 87.47 | 59.47 | 86.13 | 92.47 | 99.4 |
| RGB + DSM + aspect | 95.2 | 95.13 | 70.8 | 72.93 | 88.4 | 89.53 | 97.33 | 92.33 | 98.4 |
| RGB + DSM + TPI | 98.6 | 99.07 | 13.27 | 80.4 | 93.6 | 94.6 | 98.07 | 91.47 | 99.73 |
| RGB + DSM + TPILC | 96.67 | 96.27 | 75.27 | 70.13 | 89.67 | 87.93 | 97.6 | 92.4 | 98.47 |
| RGB + DSM + morphometric predictors | 98.33 | 98.67 | 26.33 | 84.13 | 92.93 | 97.2 | 99.13 | 94.2 | 99.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
James, D.; Collin, A.; Mury, A.; Qin, R. Satellite–Derived Topography and Morphometry for VHR Coastal Habitat Mapping: The Pleiades–1 Tri–Stereo Enhancement. Remote Sens. 2022, 14, 219. https://doi.org/10.3390/rs14010219
James D, Collin A, Mury A, Qin R. Satellite–Derived Topography and Morphometry for VHR Coastal Habitat Mapping: The Pleiades–1 Tri–Stereo Enhancement. Remote Sensing. 2022; 14(1):219. https://doi.org/10.3390/rs14010219
Chicago/Turabian StyleJames, Dorothée, Antoine Collin, Antoine Mury, and Rongjun Qin. 2022. "Satellite–Derived Topography and Morphometry for VHR Coastal Habitat Mapping: The Pleiades–1 Tri–Stereo Enhancement" Remote Sensing 14, no. 1: 219. https://doi.org/10.3390/rs14010219
APA StyleJames, D., Collin, A., Mury, A., & Qin, R. (2022). Satellite–Derived Topography and Morphometry for VHR Coastal Habitat Mapping: The Pleiades–1 Tri–Stereo Enhancement. Remote Sensing, 14(1), 219. https://doi.org/10.3390/rs14010219