
Integrated Mapping of Spatial Urban Dynamics—A European-Chinese Exploration. Part 1—Methodology for Automatic Land Cover Classification Tailored towards Spatial Allocation of Ecosystem Services Features


Abstract
1. Introduction
1.1. Impact of Urbanisation Processes on Ecosystem Services
1.2. Transferable Land Cover Mapping Approach Based on Remote Sensing
1.2.1. Ready-Made Remote Sensing (RS) Products
1.2.2. Further RS Requirements for Capturing Key Elements of Urban LC Categories across Continents
2. Approach
2.1. Satellite Images and Ancillary Data
2.2. Reference Data for Sample Points
2.2.1. Datasets for Sample Point Extraction Based on Ground Truth
CORINE Land Cover
Urban Atlas
The Land Use and Land Cover Area Frame Survey (LUCAS) Sample Points
2.2.2. Datasets for Sample Point Extraction Based on RS Products
GlobeLand30
Forest Maps
The Chinese Academy of Sciences (CAS) LC Dataset
The Peking University UrbanScape Essential Dataset (PKU-USED) for Beijing
The Thematic Mapping Product GAIA
2.2.3. Input Data for Samples Generation
3. Discerning Methodology
3.1. Study Area
3.2. Defining Essential LC Mapping Categories to Achieve Research Objectives
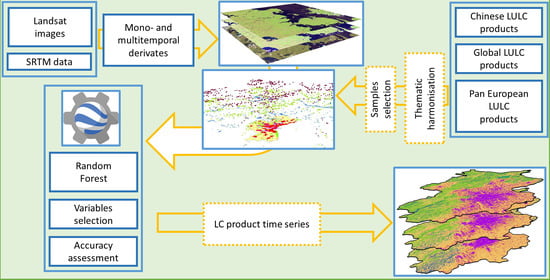
3.3. GEE Mapping Procedure
3.3.1. Preprocessing of Satellite Images
- Seven spectral reflectance (SR) bands, including blue, green, red, near infrared (NIR), short-wave infrared (SWIR1, SWIR2), and bright temperature
- Three texture variables from the Grey-Level Co-occurrence Matrix (GLCM) measurement
- Annual median composited surface reflectance images: we calculated fifteen spectral indices, including the Normalised Difference Vegetation Index (NDVI), Enhanced Vegetation Index (EVI), Land Surface Water Index (LSWI), Modified Normalised Difference Water Index (mNDWI), Normalised Difference Built Index (NDBI), Caly Minerals Ratio (CMR), Normalised Difference Snow Index (NDSI), Modified Soil Adjusted Vegetation Index (MSAVI), Spectral Variability Vegetation Index (SVVI), Transformed Difference Vegetation Index (TDVI), Normalised Built-up Index (NBAI), Chlorophyll vegetation Index (CIgreen), and Tasseled Cap Transformation (TCP) based Wetness, Greenness, and Brightness
- Four seasonal indices derived from multi-temporal spectral indices
- Four topographic variables as auxiliary parameters for the classification
3.3.2. Reference Samples Selection
Assessment of Variable Importance
3.3.3. Mapping of Grey, Green and Blue Infrastructures
Random Forest Classifier
Validation
Post-Classification of Dense and Dispersed Built-Up Areas
4. Results
4.1. Feature Selection and Ranking
4.2. Accuracy Assessment
4.3. Quantitative Analysis of LC and Its Changes
- (1)
- Built-up area ratio
- (2)
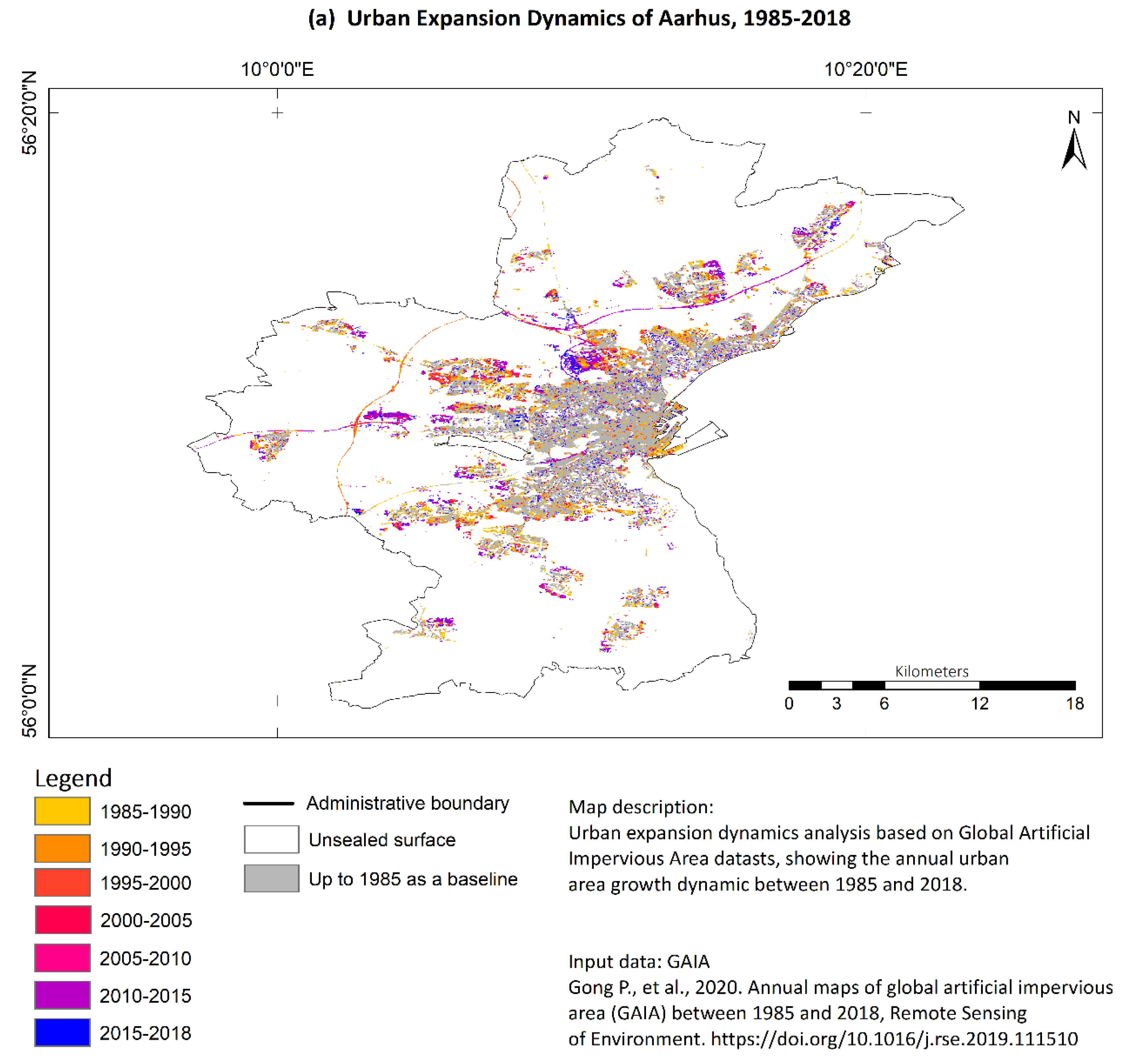
- Spatial urbanisation processes
- (3)
- Reduction of green and blue spaces in connection with urban expansion
- (4)
- Changes in agriculture
- (5)
- The ecological restoration effect in the selected European and Chinese cities
5. Discussion
5.1. Information on Urban LC in Global Thematic Products
5.2. Integrated Mapping Model for Relevant Urban LC Categories Tailored towards ES Feature Allocation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1






Appendix A.2

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2000 in China | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 488 | 150 | 0 | 0 | 1 | 0 | 0 |
| 2 | Cropland | 59 | 1940 | 0 | 23 | 34 | 0 | 7 |
| 3 | Deciduous | 0 | 0 | 63 | 19 | 5 | 0 | 0 |
| 4 | Coniferous | 0 | 14 | 11 | 201 | 10 | 0 | 0 |
| 5 | Grassland | 7 | 88 | 7 | 14 | 182 | 0 | 1 |
| 6 | Bare land | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 7 | Water | 2 | 31 | 0 | 0 | 0 | 0 | 137 |
| PA | 0.76 | 0.94 | 0.72 | 0.85 | 0.61 | 1 | 0.81 | |
| OA | 0.86 | |||||||
| Kappa | 0.76 | |||||||
| 2010 in China | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 625 | 234 | 0 | 0 | 1 | 0 | 1 |
| 2 | Cropland | 198 | 1185 | 3 | 9 | 65 | 0 | 8 |
| 3 | Deciduous | 0 | 10 | 144 | 6 | 6 | 0 | 0 |
| 4 | Coniferous | 0 | 25 | 19 | 82 | 18 | 0 | 0 |
| 5 | Grassland | 14 | 145 | 10 | 7 | 135 | 0 | 0 |
| 6 | Bare land | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 7 | Water | 5 | 31 | 0 | 2 | 0 | 0 | 130 |
| PA | 0.74 | 0.73 | 0.82 | 0.77 | 0.60 | 0 | 0.94 | |
| OA | 0.73 | |||||||
| Kappa | 0.61 | |||||||
| 2020 in China | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 234 | 39 | 0 | 0 | 0 | 0 | 0 |
| 2 | Cropland | 33 | 480 | 0 | 3 | 3 | 0 | 2 |
| 3 | Deciduous | 0 | 3 | 188 | 18 | 17 | 0 | 0 |
| 4 | Coniferous | 0 | 6 | 14 | 182 | 0 | 0 | 0 |
| 5 | Grassland | 1 | 23 | 28 | 2 | 145 | 0 | 0 |
| 6 | Bare land | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 7 | Water | 0 | 2 | 0 | 0 | 0 | 0 | 40 |
| PA | 0.86 | 0.92 | 0.83 | 0.90 | 0.72 | 0 | 0.95 | |
| OA | 0.87 | |||||||
| Kappa | 0.83 | |||||||
| 2000 in Europe | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 242 | 77 | 18 | 0 | 5 | 0 | 1 |
| 2 | Cropland | 34 | 3196 | 62 | 1 | 31 | 0 | 2 |
| 3 | Deciduous | 3 | 92 | 1184 | 4 | 8 | 0 | 0 |
| 4 | Coniferous | 1 | 9 | 23 | 64 | 1 | 0 | 0 |
| 5 | Grassland | 5 | 96 | 40 | 2 | 218 | 0 | 0 |
| 6 | Bare land | 2 | 2 | 1 | 0 | 0 | 4 | 0 |
| 7 | Water | 3 | 2 | 4 | 0 | 1 | 0 | 30 |
| PA | 0.71 | 0.96 | 0.92 | 0.65 | 0.60 | 0.44 | 0.75 | |
| OA | 0.9 | |||||||
| Kappa | 0.82 | |||||||
| 2010 in Europe | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 160 | 12 | 16 | 1 | 1 | 114 | 11 |
| 2 | Cropland | 13 | 1539 | 53 | 1 | 11 | 186 | 14 |
| 3 | Deciduous | 0 | 0 | 522 | 4 | 6 | 33 | 24 |
| 4 | Coniferous | 0 | 0 | 19 | 60 | 0 | 0 | 2 |
| 5 | Grassland | 0 | 0 | 16 | 0 | 71 | 27 | 2 |
| 6 | Bare land | 0 | 0 | 29 | 2 | 18 | 1265 | 27 |
| 7 | Water | 0 | 0 | 36 | 2 | 2 | 45 | 698 |
| PA | 0.92 | 0.99 | 0.76 | 0.86 | 0.65 | 0.76 | 0.90 | |
| OA | 0.86 | |||||||
| Kappa | 0.97 | |||||||
| 2020 in Europe | ||||||||
| Code | Urban | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water | |
| 1 | Urban | 459 | 83 | 0 | 2 | 0 | 0 | 0 |
| 2 | Cropland | 35 | 5443 | 62 | 5 | 21 | 0 | 0 |
| 3 | Deciduous | 0 | 73 | 2715 | 6 | 8 | 0 | 0 |
| 4 | Coniferous | 3 | 25 | 31 | 231 | 0 | 0 | 1 |
| 5 | Grassland | 1 | 41 | 25 | 2 | 171 | 0 | 1 |
| 6 | Bare land | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 7 | Water | 0 | 1 | 0 | 2 | 3 | 0 | 44 |
| PA | 0.84 | 0.98 | 0.97 | 0.79 | 0.71 | 0.00 | 0.88 | |
| OA | 0.95 | |||||||
| Kappa | 0.91 | |||||||
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 1699.42 | 38.64 | 115.06 | 6.06 | 10.41 | 2.80 | 0.00 | 3.66 |
| Dispersed built-up | 113.21 | 294.92 | 229.40 | 19.06 | 13.19 | 2.00 | 0.00 | 2.05 |
| Cropland | 314.96 | 331.17 | 9571.19 | 327.92 | 39.25 | 13.12 | 0.00 | 17.35 |
| Deciduous forest | 25.69 | 24.79 | 479.72 | 3719.36 | 187.29 | 9.08 | 0.00 | 6.51 |
| Coniferous forest | 0.15 | 0.30 | 2.63 | 19.08 | 80.39 | 0.73 | 0.00 | 0.10 |
| Grassland | 5.60 | 5.26 | 345.11 | 53.28 | 3.86 | 3.30 | 0.00 | 2.14 |
| Bare land | 1.78 | 2.01 | 4.52 | 0.19 | 0.09 | 0.21 | 0.00 | 0.43 |
| Water bodies | 1.03 | 0.58 | 1.72 | 0.31 | 1.65 | 9.32 | 0.00 | 112.62 |
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grass-Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 5.71 | 1.44 | 1.82 | 0.06 | 0.00 | 0.00 | 0.00 | 0.00 |
| Dispersed built-up | 0.41 | 9.72 | 12.89 | 0.28 | 0.10 | 0.05 | 0.00 | 0.22 |
| Cropland | 0.99 | 5.13 | 147.37 | 29.06 | 0.99 | 1.55 | 0.00 | 0.09 |
| Deciduous forest | 0.08 | 0.19 | 6.22 | 180.39 | 1.49 | 1.41 | 0.00 | 0.03 |
| Coniferous forest | 0.00 | 0.00 | 0.07 | 0.73 | 0.40 | 0.00 | 0.00 | 0.02 |
| Grassland | 0.13 | 0.48 | 30.08 | 21.71 | 0.08 | 2.90 | 0.00 | 0.02 |
| Bare land | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Water bodies | 0.00 | 0.07 | 0.18 | 0.05 | 0.53 | 0.00 | 0.00 | 2.41 |
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous forest | Grass- Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 75.07 | 5.64 | 13.59 | 0.19 | 1.29 | 0.00 | 0.00 | 0.12 |
| Dispersed built-up | 6.18 | 19.53 | 15.75 | 0.32 | 0.78 | 0.00 | 0.00 | 0.06 |
| Cropland | 17.31 | 26.22 | 532.20 | 19.97 | 16.94 | 0.71 | 0.00 | 2.80 |
| Deciduous forest | 0.40 | 0.82 | 35.23 | 26.79 | 9.06 | 0.19 | 0.00 | 0.69 |
| Coniferous forest | 0.00 | 0.01 | 1.43 | 1.11 | 3.24 | 0.00 | 0.00 | 0.12 |
| Grassland | 0.08 | 0.19 | 3.45 | 0.21 | 0.25 | 0.02 | 0.00 | 0.01 |
| Bare land | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Water bodies | 0.09 | 0.12 | 0.04 | 0.00 | 0.18 | 0.00 | 0.00 | 0.25 |
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 1171.92 | 37.72 | 208.38 | 0.28 | 0.38 | 2.22 | 0.00 | 11.71 |
| Dispersed built-up | 343.15 | 172.85 | 172.04 | 1.42 | 0.38 | 9.42 | 0.00 | 11.34 |
| Cropland | 1170.53 | 779.66 | 5617.81 | 329.94 | 72.88 | 343.97 | 0.00 | 100.77 |
| Deciduous forest | 0.04 | 0.90 | 3.45 | 1926.02 | 620.08 | 88.64 | 0.00 | 0.02 |
| Coniferous forest | 0.26 | 2.65 | 5.61 | 994.49 | 591.53 | 106.58 | 0.00 | 5.23 |
| Grassland | 5.78 | 41.58 | 349.35 | 3798.65 | 200.38 | 1957.70 | 0.00 | 4.49 |
| Bare land | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Water bodies | 3.97 | 3.85 | 15.54 | 2.08 | 0.38 | 4.43 | 0.00 | 206.39 |
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 930.52 | 14.99 | 129.63 | 0.09 | 0.66 | 0.22 | 0.00 | 4.20 |
| Dispersed built-up | 253.45 | 129.26 | 190.34 | 0.01 | 0.15 | 0.04 | 0.00 | 4.01 |
| Cropland | 1198.69 | 721.62 | 4096.34 | 0.37 | 8.09 | 0.56 | 0.00 | 116.01 |
| Deciduous forest | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Coniferous forest | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Grassland | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Bare land | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Water bodies | 14.75 | 11.08 | 90.26 | 0.06 | 0.26 | 0.04 | 0.00 | 157.02 |
| 2000 2020 | Dense Built-Up | Dispersed Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grass- Land | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|
| Dense built-up | 544.37 | 16.66 | 52.20 | 0.01 | 0.64 | 0.19 | 0.00 | 7.88 |
| Dispersed built-up | 201.04 | 204.86 | 139.36 | 0.4 | 2.92 | 3.91 | 0.00 | 8.62 |
| Cropland | 672.18 | 372.79 | 2473.82 | 29.8 | 352.87 | 6.38 | 0.00 | 52.24 |
| Deciduous forest | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Coniferous forest | 5.35 | 16.84 | 167.62 | 32.7 | 3202.4 | 5.63 | 0.00 | 2.19 |
| Grassland | 2.49 | 11.00 | 235.83 | 45.39 | 1019 | 3.50 | 0.00 | 1.46 |
| Bare land | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Water bodies | 59.20 | 41.49 | 111.98 | 1.42 | 10.20 | 0.46 | 0.00 | 185.3 |
References
- United Nations. World Urbanization Prospects: The 2018 Revision. Key Facts. Available online: https://population.un.org/wup/Publications/Files/WUP2018-KeyFacts.pdf (accessed on 26 January 2020).
- Baker, J.L. Climate Change, Disaster Risk, and the Urban Poor: Cities Building Resilience for a Changing World; World Bank: Washington, DC, USA, 2012; ISBN 978-0-8213-8845-7. [Google Scholar]
- Jha, A.K.; Miner, T.W.; Stanton-Geddes, Z. Building Urban Resilience: Principles, Tools, and Practice; World Bank: Washington, DC, USA, 2013; ISBN 978-0821388655. [Google Scholar]
- Heinrichs, D.; Krellenberg, K.; Hansjürgens, B.; Martínez, F. Risk Habitat Megacity; Springer Science & Business Media: Berlin, Germany, 2012; ISBN 978-3-642-11543-1. [Google Scholar]
- UN SDGs. Transforming Our World: The 2030 Agenda for Sustainable Development. Resolution Adopted by the UN General Assembly. 25 September 2015. Available online: https://sustainabledevelopment.un.org/post2015/transformingourworld (accessed on 2 February 2021).
- Esch, T.; Heldens, W.; Hirner, A. The Global Urban Footprint. In Urban Remote Sensing, 2nd ed.; Weng, Q., Quattrochi, D.A., Gamba, P., Eds.; Taylor & Francis: Oxfordshire, UK, 2018; pp. 1–12. ISBN 9781138054608. [Google Scholar]
- Angel, S.; Parent, J.; Civco, D.L.; Blei, A.; Poter, D. The dimensions of global urban expansion: Estimates and projections for all countries, 2000–2050. Progr. Plan. 2011, 75, 53–107. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Liu, X.; Huang, Y.; Xu, X.; Li, X.; Li, X.; Ciais, P.; Lin, P.; Gong, K.; Ziegler, A.D.; Chen, A.; et al. High-spatiotemporal-resolution mapping of global urban change from 1985 to 2015. Nat. Sustain. 2020, 3, 564–570. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C. Satellites: Make Earth observations open access. Nature 2014, 513, 30–31. [Google Scholar] [CrossRef]
- Caetano, M.; Mata, F.; Freire, S. Accuracy assessment of the Portuguese CORINE Land Cover map. In Global Developments in Environmental Earth Observation from Space; Marçal, A., Ed.; Millpress: Rotterdam, The Netherlands, 2006; pp. 459–467. ISBN 978-90-5966-042-7. [Google Scholar]
- Büttner, G.; Maucha, G. The Thematic Accuracy of Corine Land Cover 2000 Assessment Using LUCAS (Land Use/Cover Area Frame Statistical Survey); EEA Technical report No 7/2006; European Environment Agency: Copenhagen, Denmark, 2016; Available online: https://land.copernicus.eu/user-corner/technical-library/technical_report_7_2006.pdf (accessed on 26 January 2020).
- Aune-Lundberg, L.; Strand, G.-H. The content and accuracy of the CORINE Land Cover dataset for Norway. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 1–10. [Google Scholar] [CrossRef]
- European Commission. Mapping Human Presence on Earth. The Global Human Settlements Layer (GHSL). 2006. Available online: https://ec.europa.eu/jrc/sites/jrcsh/files/jrc-ghsl-infographics-key_messages.pdf (accessed on 26 January 2020).
- European Commission. Urban Atlas 2018 Mapping Guide. v6.7. 2020. Available online: https://land.copernicus.eu/user-corner/technical-library/urban-atlas-mapping-guide (accessed on 26 January 2020).
- Copernicus. Urban Atlas 2012 validation report. GMES Initial Operations/Copernicus Land Monitoring Services—Validation of Products, Report Issue 1.2. 2017. Available online: https://land.copernicus.eu/user-corner/technical-library/ua-2012-validation-report (accessed on 26 January 2020).
- Arsanjani, J.J.; See, L.; Tayyebi, A. Assessing the suitability of GlobeLand30 for mapping land cover in Germany. Int. J. Digit. Earth. 2016, 9, 873–891. [Google Scholar] [CrossRef]
- Ballin, M.; Barcaroli, G.; Masselli, M.; Scarnó, M. Redesign Sample for Land Use/Cover Area Frame Survey (LUCAS) 2018; Publications Office of the European Union: Luxembourg, 2018; ISBN 978-92-79-93921-1. [Google Scholar]
- Chen, J.; Chen, J. GlobeLand30: Operational global land cover mapping and big-data analysis. Sci. China Earth Sci. 2018, 61, 1533–1534. [Google Scholar] [CrossRef]
- Li, C.; Wang, J.; Hu, L.; Yu, L.; Clinton, N.; Huang, H.; Yang, J.; Gong, P. A Circa 2010 Thirty Meter Resolution Forest Map for China. Remote Sens. 2014, 6, 5325–5343. [Google Scholar] [CrossRef]
- Xu, X.; Pang, Z.; Yu, X. Spatial-Temporal Pattern Analysis of Land Use/Cover Change: Methods and Application; Scientific and Technical Documentation Press: Beijing, China, 2014; ISBN 978-7-5023-8955-0. [Google Scholar]
- Zhang, X.; Du, S. A Linear Dirichlet Mixture Model for decomposing scenes: Application to analyzing urban functional zonings. Remote Sens. Environ. 2015, 169, 37–49. [Google Scholar] [CrossRef]
- Zhang, X.; Du, S.; Wang, Q. Hierarchical semantic cognition for urban functional zones with VHR satellite images and POI data. ISPRS J. Photogramm. Remote Sens. 2017, 132, 170–184. [Google Scholar] [CrossRef]
- Du, S.; Du, S.; Liu, B.; Zhang, X.; Zheng, Z. Large-scale urban functional zone mapping by integrating remote sensing images and open social data. GIsci Remote Sens. 2020, 57, 411–430. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, J.M.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Claverie, M.; Vermote, E.F.; Franch, B.; Masek, J.G. Evaluation of the Landsat-5 TM and Landsat-7 ETM+ surface reflectance products. Remote Sens. Environ. 2015, 169, 390–403. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Conners, R.W.; Trivedi, M.M.; Harlow, C.A. Segmentation of a high-resolution urban scene using texture operators. Comput. Gr. Image Process. 1984, 25, 273–310. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. Syst. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Tucker, C.J. 1979. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Xiao, X.M.; Hollinger, D.; Aber, J.; Goltz, M.; Davidson, E.A.; Zhang, Q.Y.; Moore, B. Satellite-Based Modeling of Gross Primary Production in an Evergreen Needleleaf Forest. Remote Sens. Environ. 2004, 89, 519–534. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index NDWI to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2007, 27, 3025–3033. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2010, 24, 583–594. [Google Scholar] [CrossRef]
- Alasta, A.F. Using Remote Sensing data to identify iron deposits in central western Libya. In Proceedings of the International Conference on Emerging Trends in Computer and Image Processing ICETCIP’2011, Bangkok, Thailand, 23–24 December 2011; pp. 56–61. [Google Scholar]
- Hall, D.K.; Riggs, G.A. Normalized-Difference Snow Index (NDSI). In Encyclopedia of Snow, Ice, and Glaciers; Singh, V.P., Singh, P., Haritashya, U.K., Eds.; Encyclopedia of Earth Sciences; Springer: Dordrecht, The Netherlands, 2011; ISBN 978-90-481-2642-2. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Coulter, L.L.; Stow, D.A.; Tsai, Y.-H.; Ibanez, N.; Shih, H.C.; Kerr, A.; Benza, M.; Weeks, J.R.; Mensah, F. Classification and assessment of land cover and land use change in southern Ghana using dense stacks of Landsat 7 ETM+ imagery. Remote Sens. Environ. 2016, 184, 396–409. [Google Scholar] [CrossRef]
- Bannari, A.; Asalhi, H.; Teillet, P.M. Transformed difference vegetation index (TDVI) for vegetation cover mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium in Toronto, Toronto, ON, Canada, 24–28 June 2002; pp. 3053–3055. [Google Scholar]
- Waqar, M.M.; Mirza, J.F.; Mumtaz, R.; Hussain, E. Development of new indices for extraction of built-up area & bare soil from Landsat data. Sci. Rep. 2012, 1, 1. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Karlson, M.; Ostwald, M.; Reese, H.; Sanou, J.; Tankoano, B.; Mattsson, E. Mapping Tree Canopy Cover and Aboveground Biomass in Sudano-Sahelian Woodlands Using Landsat 8 and Random Forest. Remote Sens. 2015, 7, 10017–10041. [Google Scholar] [CrossRef]
- Price, K.P.; Guo, X.; Stiles, J.M. Optimal Landsat TM band combinations and vegetation indices for discrimination of six grassland types in eastern Kansas. Int. J. Remote Sens. 2010, 23, 5031–5042. [Google Scholar] [CrossRef]
- Reschke, J.; Hüttich, C. Continuous field mapping of Mediterranean wetlands using sub-pixel spectral signatures and multi-temporal Landsat data. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 220–229. [Google Scholar] [CrossRef]
- Jarvis, A.; Rubiano, J.; Nelson, A.; Farrow, A.; Mulligan, M. Practical Use of SRTM Data in the Tropics: Comparisons with Digital Elevation Models Generated from Cartographic Data; International Centre for Tropical, Agriculture (CIAT): Cali, Columbia, 2004; p. 32. [Google Scholar]
- Sesnie, S.E.; Gessler, P.E.; Finegan, B.; Thessler, S. Integrating Landsat TM and SRTM-DEM derived variables with decision trees for habitat classification and change detection in complex neotropical environments. Remote Sens. Environ. 2008, 112, 2145–2159. [Google Scholar] [CrossRef]
- Simonetti, E.; Simonetti, D.; Preatoni, D. Phenology-Based Land Cover Classification Using Landsat 8 Time Series; Publications Office of the European Union: Luxembourg, 2014; ISBN 978-92-79-40844-1. [Google Scholar]
- Zhang, F.; Yang, X. Improving land cover classification in an urbanized coastal area by random forests: The role of variable selection. Remote Sens. Environ. 2020, 251, 112105. [Google Scholar] [CrossRef]
- Menze, B.H.; Kelm, B.M.; Masuch, R.; Himmelreich, U.; Bachert, P.; Petrich, W.; Hamprecht, F.A. A comparison of random forest and its Gini importance with standard chemometric methods for the feature selection and classification of spectral data. BMC Bioinform. 2009, 10, 213. [Google Scholar] [CrossRef] [PubMed]
- Strobl, C.; Boulesteix, A.-L.; Zeileis, A.; Hothorn, T. Bias in random forest variable importance measures: Illustrations, sources and a solution. BMC Bioinform. 2007, 8, 25:1–25:21. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gumma, M.K.; Thenkabail, P.S.; Teluguntla, P.G.; Oliphant, A.; Xiong, J.; Giri, C.; Pyla, V.; Dixit, S.; Whitbread, A.M. Agricultural cropland extent and areas of South Asia derived using Landsat satellite 30-m time-series big-data using random forest machine learning algorithms on the Google Earth Engine cloud. GISci. Remote Sens. 2020, 57, 302–322. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. On the Importance of Training Data Sample Selection in Random Forest Image Classification: A Case Study in Peatland Ecosystem Mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Ismail, R.; Mutanga, O.; Kumar, L. Modeling the potential distribution of pine forests susceptible to sirex noctilio infestations in Mpumalanga, South Africa. Trans. GIS 2010, 14, 709–726. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by random forest. R. News 2002, 2, 18–22. [Google Scholar]
- Cánovas-García, F.; Alonso-Sarría, F.; Gomariz-Castillo, F. Modification of the random forest algorithm to avoid statistical dependence problems when classifying remote sensing imagery. Comput. Geosci. 2017, 103, 1–11. [Google Scholar] [CrossRef]
- Ghimire, B.; Rogan, J.; Galiano, V.R. An evaluation of bagging, boosting, and random forests for land-cover classification in Cape Cod, Massachusetts, USA. GISci. Remote Sens. 2012, 49, 623–643. [Google Scholar] [CrossRef]
- Phan, T.N.; Kuch, V.; Lehnert, L.W. Land Cover Classification using Google Earth Engine and Random Forest Classifier—The Role of Image Composition. Remote Sens. 2020, 12, 2411. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Mugiraneza, T.; Ban, Y.; Haas, J. Urban land cover dynamics and their impact on ecosystem services in Kigali, Rwanda using multi-temporal Landsat data. Remote Sens. Appl. Soc. Environ. 2019, 13, 234–246. [Google Scholar] [CrossRef]
- The State Council of the People′s Republic of China, 2017. Create a New Situation for Ecological Civilization Construction. Available online: http://www.gov.cn/xinwen/2017-08/02/content_5215591.html (accessed on 2 February 2021).
- Kadhim, N.; Mourshed, M.; Bray, M. Advances in remote sensing applications for urban sustainability. Euro-Mediterr. J. Environ. Integr. 2016, 1. [Google Scholar] [CrossRef]
- Ishola, K.A.; Okogbue, E.C.; Adeyeri, O.E. Dynamics of surface urban biophysical compositions and its impact on land surface thermal field. Model. Earth Syst. Environ. 2016, 2, 1–20. [Google Scholar] [CrossRef]
- Demuzere, M.; Bechtel, B.; Middel, A.; Mills, G. Mapping Europe into local climate zones. PLoS ONE 2019, 14. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P. Using the 500m MODIS land cover product to derive a consistent continental scale 30m Landsat land cover classification. Remote Sens. Environ. 2017, 197, 15–34. [Google Scholar] [CrossRef]
- Burke, M.; Driscoll, A.; Lobell, D.B.; Ermon, S. Using satellite imagery to understand and promote sustainable development. Science 2021, 371, 6335. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Jones, S.; Soto-Berelov, M.; Haywood, A.; Hislop, S. Landsat time-series for estimating forest aboveground biomass and Its dynamics across space and time: A review. Remote Sens. 2020, 12, 98. [Google Scholar] [CrossRef]






| Mapping Categories | Own Source | Reviewed Source of Categorical Definitions | |||
|---|---|---|---|---|---|
| Class name (30 m res.) | Random forest (RF) classifier for distinct LC mapping in GEE | Urban Atlas (2006/2012/2018) 30 m to 10 m res. | GAIA (1985–2018; annual) GLC 30 m res. | GlobeLand30 (2000/2010) GLC 30 m res. | CORINE Land Cover (1990/2000/2006/2012/2018) 30 m res. |
| Water bodies | Areas with standing and flowing waters | Water bodies | Water. No definition | n.a. | Areas with standing and flowing waters |
| Dense urban fabric | ≥50% of the area covered by built-up and other sealed surfaces 17 × 17 moving window | Continuous urban fabric (>80%) Discontinuous dense urban fabric (50–80%) | Global artificial impervious areas—man-made structures. Urban > 50%; proxy for built-up areas. No subdivision | Artificial surfaces: urban areas, roads, asphalt. Specific textual patterns >50% | Artificial surface with land use classification |
| Dispersed urban fabric | <50% of the area covered by built-up and other sealed surfaces 17 × 17 moving window | Discontinuous medium density urban fabric (30–50%) Discontinuous low density urban fabric (10–30%) | |||
| Open spaces/ barren lands (bare soils) | Bare land (i.e., areas with uncovered soils) | Land without current use | Bare land | Bare land | Bare land |
| Perennial grassland and shrubland/cultivated land and cropland | Cropland Deciduous forest Coniferous forest Grassland | Arable land Pastures Mixed cultivation Deciduous forest Coniferous forest Green urban areas | Vegetation. No definition No further distinctions | Wetlands: bogs, fens, meadows, peat land, floodplains Cultivated land Grassland | Vegetated areas with land use Deciduous forest Coniferous forest |
| Code | Type | Variables | Formula | Reference |
|---|---|---|---|---|
| 1–7 | Spectral Reflectance | Blue | Surface reflectance bands of Landsat-5/7 TM data and Landsat-8 OLI/TIRS, where Blue, Green, Red, NIR, SWIR1, SWIR2, BT1, BT2 are band1(2), band2(3), band3(4), band4(5), band5(6), band7(7) and band6(10) of Landsat-5/7(8), respectively. | [27,28] |
| Green | ||||
| Red | ||||
| NIR | ||||
| SWIR1 | ||||
| SWIR2 | ||||
| Bright temperature (BT) | ||||
| 8–10 | Texture | glcm_var | Measures how spread out the distribution of grey levels is | [29,30] |
| glcm_contrast | Measures the local contrast of an image | |||
| glcm_savg | Sum Average | |||
| 11–25 | Spectral Indices | NDVI | (NIR − R)/(NIR + R) | [31] |
| EVI | 2.5 (NIR − RED)/(NIR + 6R − 7.5B + 1) | [32] | ||
| LSWI | (NIR − SWIR1)/(NIR + SWIR1) | [33] | ||
| mNDWI | (GREEN − SWIR1)/(GREEN + SWIR2) | [34] | ||
| NDBI | (SWIR1 − NIR)/(SWIR1 + NIR) | [35] | ||
| CMR | SWIR1/SWIR2 | [36] | ||
| NDSI | [37] | |||
| MSAVI | )/2 | [38] | ||
| SVVI | SD(B,G,R,NIR,SWIR1,SWIR2)-SD(NIR,SWIR1,SWIR2) | [39] | ||
| TDVI | 1.5((NIR-R)/((2NIR + R+0.5)2)) | [40] | ||
| NBAI | (SWIR2 − (SWIR1/G))/(SWIR2 + (SWIR1/G)) | [41] | ||
| CIgreen | NIR/G-1 | [42] | ||
| Wetness | Tasseled Cap Transformation (TCP) | [43,44] | ||
| Greenness | ||||
| Brightness | ||||
| 26–28 | Seasonal Indices | VIseasonal-Dual-Season Vegetation Indices: VI-NDVI, mNDWI, SVVI | (VIwet − VIdry)/(VIwet + VIdry) | [45] |
| 29–32 | Topographic Variables | Elevation Slope Aspect Hillshade | SRTM (Shuttle Radar Topography Mission) SRTM90_V4 data derived | [46,47] |
| City | Year | Type | Built-Up | Cropland | Deciduous Forest | Coniferous Forest | Grassland | Bare Land | Water |
|---|---|---|---|---|---|---|---|---|---|
| Paris Region | 2000 | T | 317 | 3190 | 1051 | 60 | 389 | 40 | 69 |
| V | 136 | 1367 | 450 | 26 | 167 | 17 | 30 | ||
| Sum | 453 | 4557 | 1501 | 86 | 556 | 57 | 99 | ||
| 2010 | T | 454 | 1488 | 616 | 46 | 58 | 12 | 21 | |
| V | 195 | 638 | 264 | 20 | 25 | 5 | 9 | ||
| Sum | 649 | 2126 | 880 | 66 | 83 | 17 | 30 | ||
| 2020 | T | 438 | 4713 | 1642 | 168 | 70 | 32 | 68 | |
| V | 188 | 2020 | 704 | 72 | 30 | 14 | 29 | ||
| Total | 626 | 6733 | 2346 | 240 | 100 | 46 | 97 | ||
| Velika Gorica | 2000 | T | 107 | 1110 | 2027 | 66 | 250 | 28 | 60 |
| V | 46 | 476 | 869 | 28 | 107 | 12 | 26 | ||
| Sum | 153 | 1586 | 2896 | 94 | 357 | 40 | 86 | ||
| 2010 | T | 132 | 468 | 1080 | 88 | 124 | 22 | 60 | |
| V | 57 | 201 | 463 | 38 | 53 | 9 | 26 | ||
| Sum | 189 | 669 | 1543 | 126 | 177 | 31 | 86 | ||
| 2020 | T | 106 | 645 | 36 | 42 | 22 | 20 | 60 | |
| V | 45 | 276 | 15 | 18 | 9 | 9 | 26 | ||
| Sum | 151 | 921 | 51 | 60 | 31 | 29 | 86 | ||
| Aarhus | 2000 | T | 118 | 102 | 732 | 30 | 145 | 21 | 78 |
| V | 51 | 44 | 314 | 13 | 62 | 9 | 33 | ||
| Sum | 169 | 146 | 1046 | 43 | 207 | 30 | 111 | ||
| 2010 | T | 230 | 780 | 500 | 320 | 20 | 38 | 90 | |
| V | 99 | 334 | 214 | 137 | 9 | 16 | 39 | ||
| Sum | 329 | 1114 | 714 | 457 | 29 | 54 | 129 | ||
| 2020 | T | 108 | 1074 | 79 | 89 | 38 | 20 | 180 | |
| V | 46 | 460 | 34 | 38 | 16 | 9 | 77 | ||
| Sum | 154 | 1534 | 113 | 127 | 54 | 29 | 257 | ||
| Beijing | 2000 | T | 222 | 731 | 124 | 149 | 231 | 52 | 31 |
| V | 95 | 313 | 53 | 64 | 99 | 22 | 13 | ||
| Sum | 317 | 1044 | 177 | 213 | 330 | 74 | 44 | ||
| 2010 | T | 446 | 989 | 306 | 70 | 289 | 18 | 31 | |
| V | 191 | 424 | 131 | 30 | 124 | 8 | 13 | ||
| Sum | 637 | 1413 | 437 | 100 | 413 | 26 | 44 | ||
| 2020 | T | 253 | 743 | 445 | 152 | 491 | 45 | 28 | |
| V | 108 | 318 | 191 | 65 | 210 | 19 | 12 | ||
| Total | 361 | 1061 | 636 | 217 | 701 | 64 | 40 | ||
| Shanghai | 2000 | T | 633 | 2120 | 40 | 185 | 173 | 48 | 359 |
| V | 271 | 909 | 17 | 79 | 74 | 21 | 154 | ||
| Sum | 904 | 3029 | 57 | 264 | 247 | 69 | 513 | ||
| 2010 | T | 636 | 906 | 92 | 35 | 66 | 16 | 242 | |
| V | 273 | 388 | 39 | 15 | 28 | 7 | 104 | ||
| Sum | 909 | 1294 | 131 | 50 | 94 | 23 | 346 | ||
| 2020 | T | 319 | 406 | 48 | 68 | 56 | 25 | 429 | |
| V | 137 | 174 | 21 | 29 | 24 | 11 | 184 | ||
| Sum | 456 | 580 | 69 | 97 | 80 | 36 | 613 | ||
| Ningbo | 2000 | T | 182 | 1008 | 130 | 199 | 164 | 35 | 80 |
| V | 78 | 432 | 56 | 85 | 70 | 15 | 34 | ||
| Sum | 260 | 1440 | 186 | 284 | 234 | 50 | 114 | ||
| 2010 | T | 194 | 508 | 10 | 137 | 227 | 40 | 132 | |
| V | 83 | 218 | 4 | 59 | 97 | 17 | 57 | ||
| Sum | 277 | 726 | 14 | 196 | 324 | 57 | 189 | ||
| 2020 | T | 127 | 256 | 15 | 378 | 66 | 58 | 453 | |
| V | 54 | 110 | 6 | 162 | 28 | 25 | 194 | ||
| Sum | 181 | 366 | 21 | 540 | 94 | 83 | 647 |
| Type | Built-Up | Crop- Land | Deciduous Forest | Coniferous Forest | Grass-Land | Bare Land | Water |
| PA | 80% | 92% | 84% | 80% | 64% | 73% | 87% |
| City | Year | Dense Built-Up | Dispersed Built-Up | Crop- Land | Deciduous Forest | Coniferous Forest | Grass- Land | Water Bodies | Bare Land |
|---|---|---|---|---|---|---|---|---|---|
| Paris Region | 2000 | 1235.9 | 444.5 | 7013.2 | 2941.9 | 68.5 | 275.9 | 84.0 | 6.1 |
| 2010 | 1300.0 | 323.0 | 7060.1 | 3048.5 | 95.6 | 133.4 | 103.2 | 6.1 | |
| 2020 | 1424.3 | 460.4 | 7101.4 | 2739.0 | 222.5 | 26.8 | 95.6 | 0.0 | |
| Velika Gorica | 2000 | 6.3 | 16.5 | 129.4 | 132.7 | 0.9 | 38.7 | 2.3 | 0.0 |
| 2010 | 7.3 | 21.7 | 142.7 | 146.2 | 0.0 | 7.6 | 1.2 | 0.0 | |
| 2020 | 5.1 | 11.9 | 138.7 | 162.4 | 2.5 | 4.1 | 1.9 | 0.0 | |
| Aarhus | 2000 | 53.5 | 23.8 | 344.0 | 40.9 | 3.3 | 2.3 | 0.4 | 0.0 |
| 2010 | 54.3 | 21.7 | 355.4 | 29.2 | 4.9 | 0.1 | 2.6 | 0.0 | |
| 2020 | 55.3 | 29.3 | 335.9 | 27.1 | 17.7 | 0.5 | 2.3 | 0.0 | |
| Beijing | 2000 | 1097.2 | 543.7 | 6435.7 | 2007.0 | 1301.5 | 4840.2 | 180.1 | 0.0 |
| 2010 | 1664.8 | 650.3 | 6397.4 | 3755.7 | 475.2 | 3303.7 | 158.3 | 0.0 | |
| 2020 | 2064.0 | 794.8 | 4872.4 | 5369.0 | 1131.0 | 1915.4 | 258.8 | 0.0 | |
| Shanghai | 2000 | 921.3 | 492.3 | 5236.9 | 0.0 | 0.0 | 0.0 | 233.2 | 0.0 |
| 2010 | 1751.0 | 654.5 | 4083.1 | 71.5 | 1.7 | 34.2 | 287.7 | 0.0 | |
| 2020 | 2045.1 | 747.9 | 3841.9 | 0.5 | 7.8 | 0.7 | 239.8 | 0.0 | |
| Ningbo | 2000 | 537.8 | 485.3 | 3424.6 | 0.0 | 2974.0 | 1142.7 | 354.7 | 0.0 |
| 2010 | 828.7 | 427.9 | 3795.9 | 32.1 | 2730.2 | 788.5 | 315.8 | 0.0 | |
| 2020 | 1282.9 | 574.0 | 2751.7 | 94.9 | 3975.4 | 17.4 | 222.9 | 0.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banzhaf, E.; Wu, W.; Luo, X.; Knopp, J. Integrated Mapping of Spatial Urban Dynamics—A European-Chinese Exploration. Part 1—Methodology for Automatic Land Cover Classification Tailored towards Spatial Allocation of Ecosystem Services Features. Remote Sens. 2021, 13, 1744. https://doi.org/10.3390/rs13091744
Banzhaf E, Wu W, Luo X, Knopp J. Integrated Mapping of Spatial Urban Dynamics—A European-Chinese Exploration. Part 1—Methodology for Automatic Land Cover Classification Tailored towards Spatial Allocation of Ecosystem Services Features. Remote Sensing. 2021; 13(9):1744. https://doi.org/10.3390/rs13091744
Chicago/Turabian StyleBanzhaf, Ellen, Wanben Wu, Xiangyu Luo, and Julius Knopp. 2021. "Integrated Mapping of Spatial Urban Dynamics—A European-Chinese Exploration. Part 1—Methodology for Automatic Land Cover Classification Tailored towards Spatial Allocation of Ecosystem Services Features" Remote Sensing 13, no. 9: 1744. https://doi.org/10.3390/rs13091744
APA StyleBanzhaf, E., Wu, W., Luo, X., & Knopp, J. (2021). Integrated Mapping of Spatial Urban Dynamics—A European-Chinese Exploration. Part 1—Methodology for Automatic Land Cover Classification Tailored towards Spatial Allocation of Ecosystem Services Features. Remote Sensing, 13(9), 1744. https://doi.org/10.3390/rs13091744