
Melting Layer Detection and Observation with the NCAR Airborne W-Band Radar


Abstract
1. Introduction
2. Data
2.1. HCR Data
2.2. Dropsonde Data
3. Algorithm Description
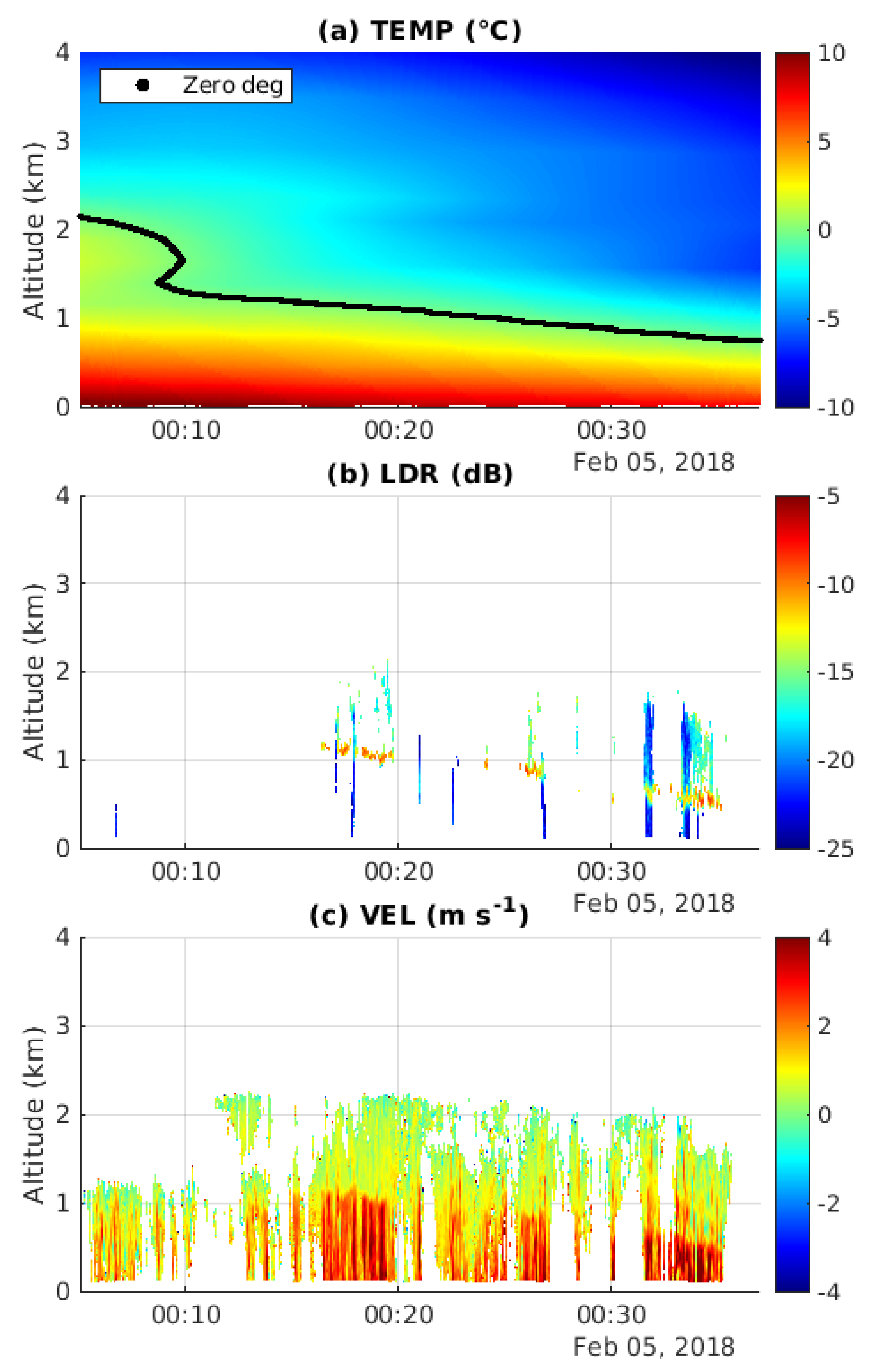
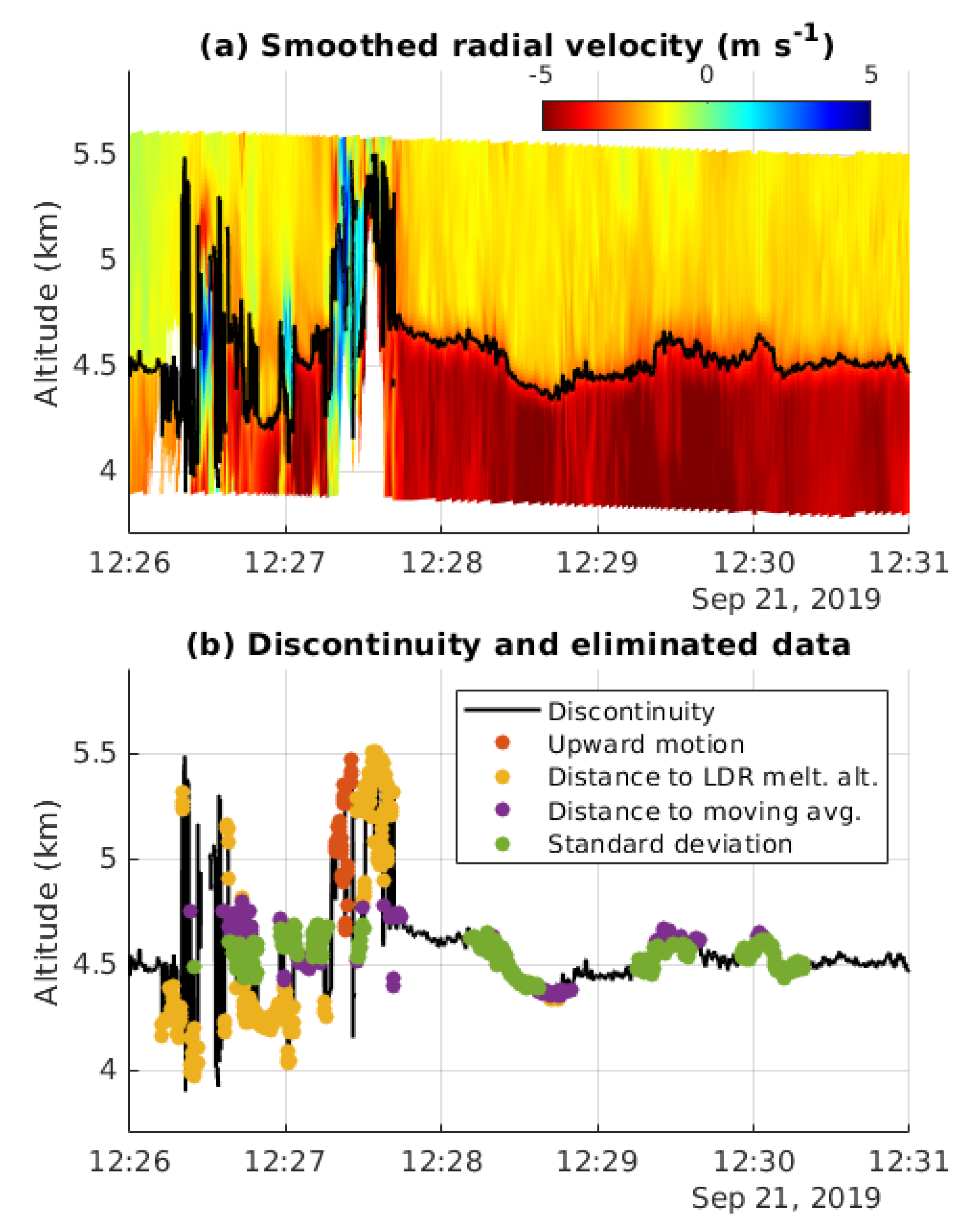
3.1. Melting Layer Detection
3.2. Melting Layer Interpolation in Time
3.3. The Icing Level
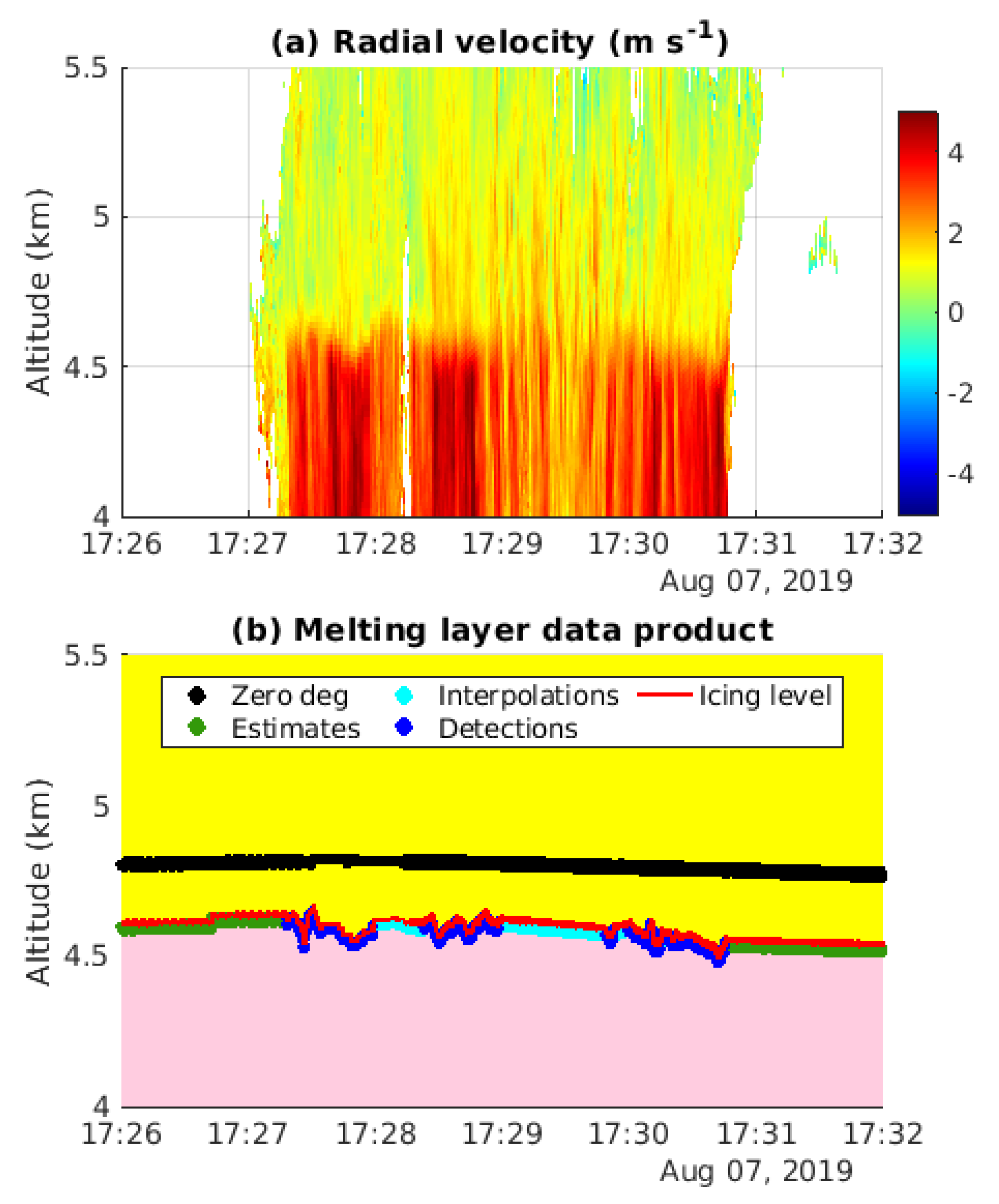
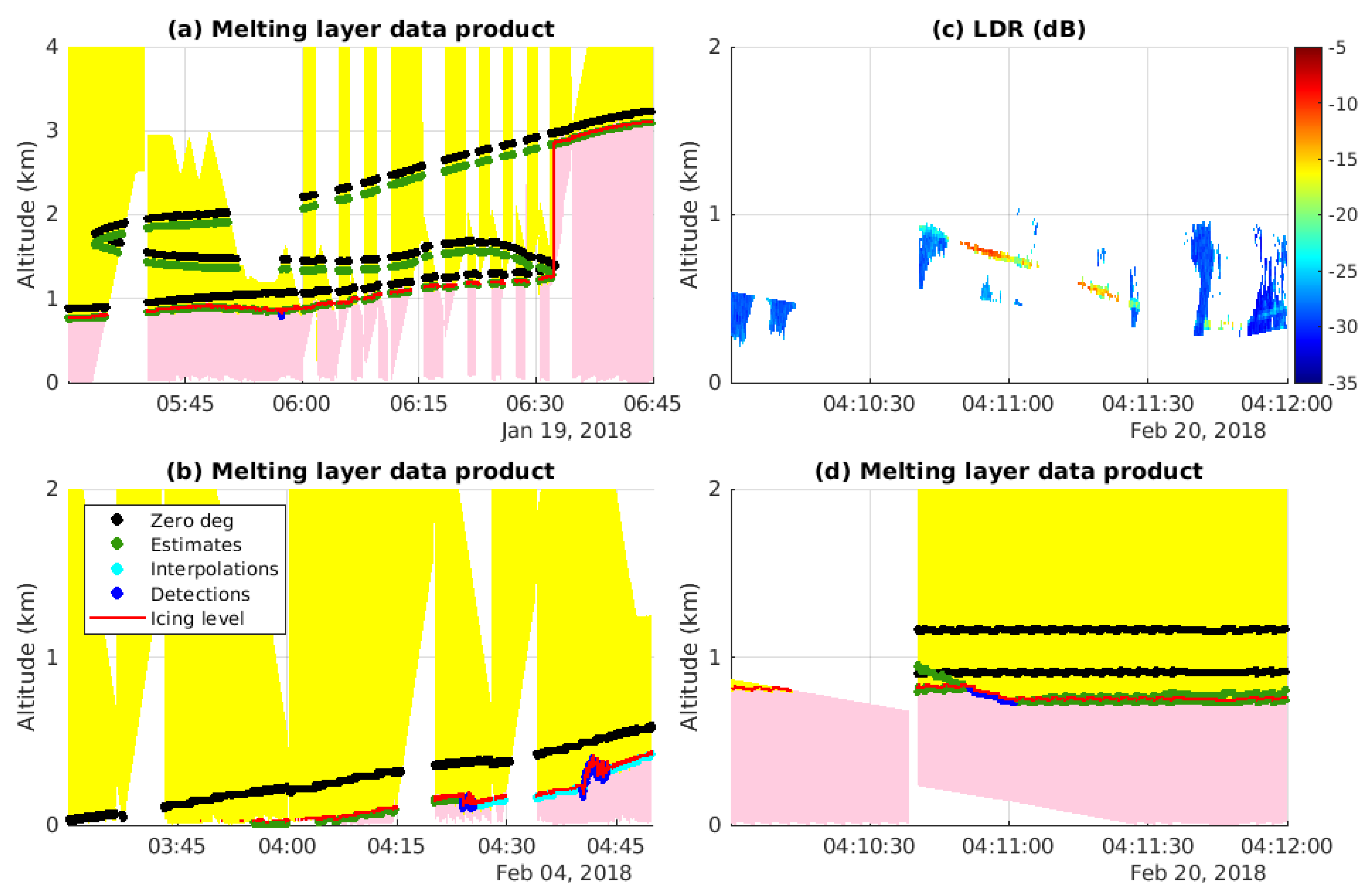
3.4. The Melting Layer Product
3.5. Product Quality Assessment
4. Discussion of the Identified Melting Layer
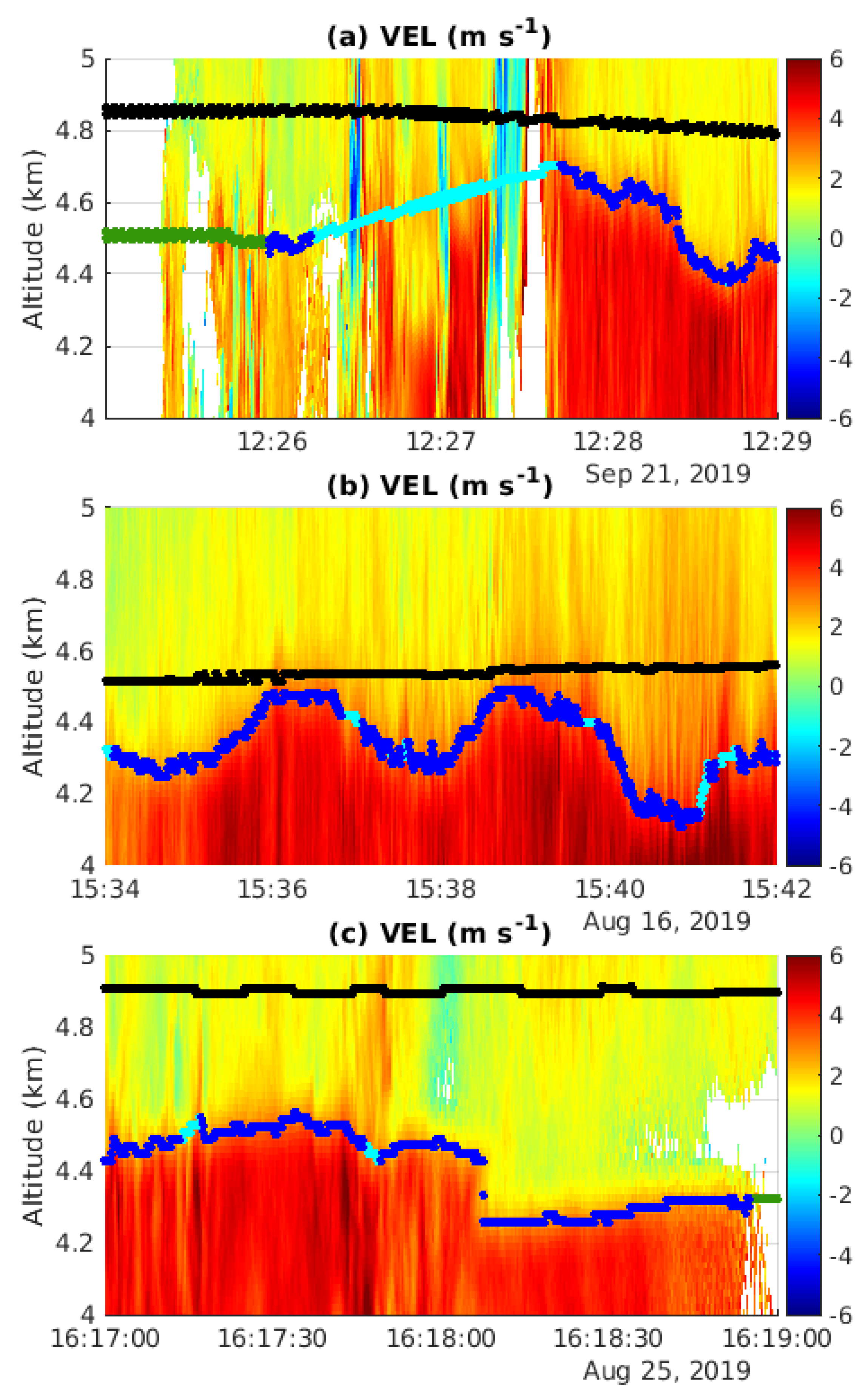
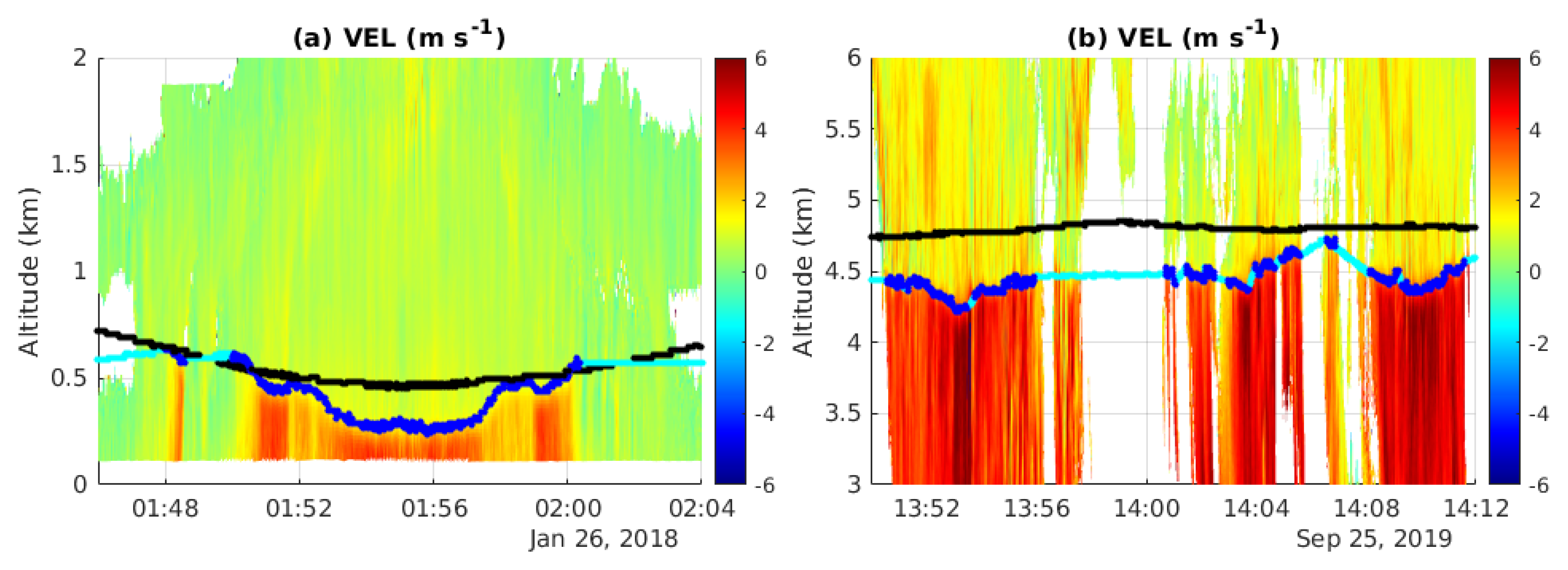
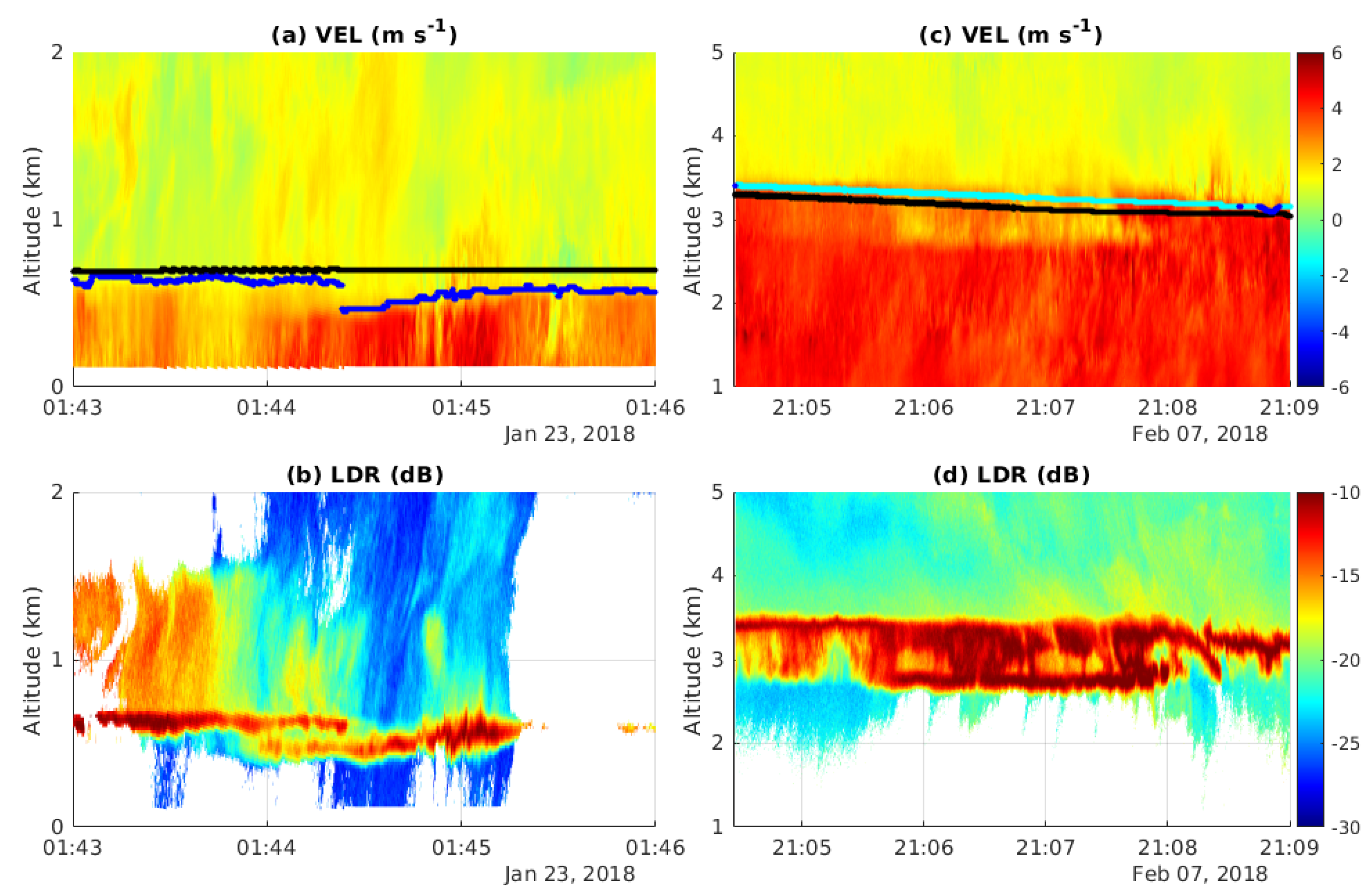
4.1. Special Observations
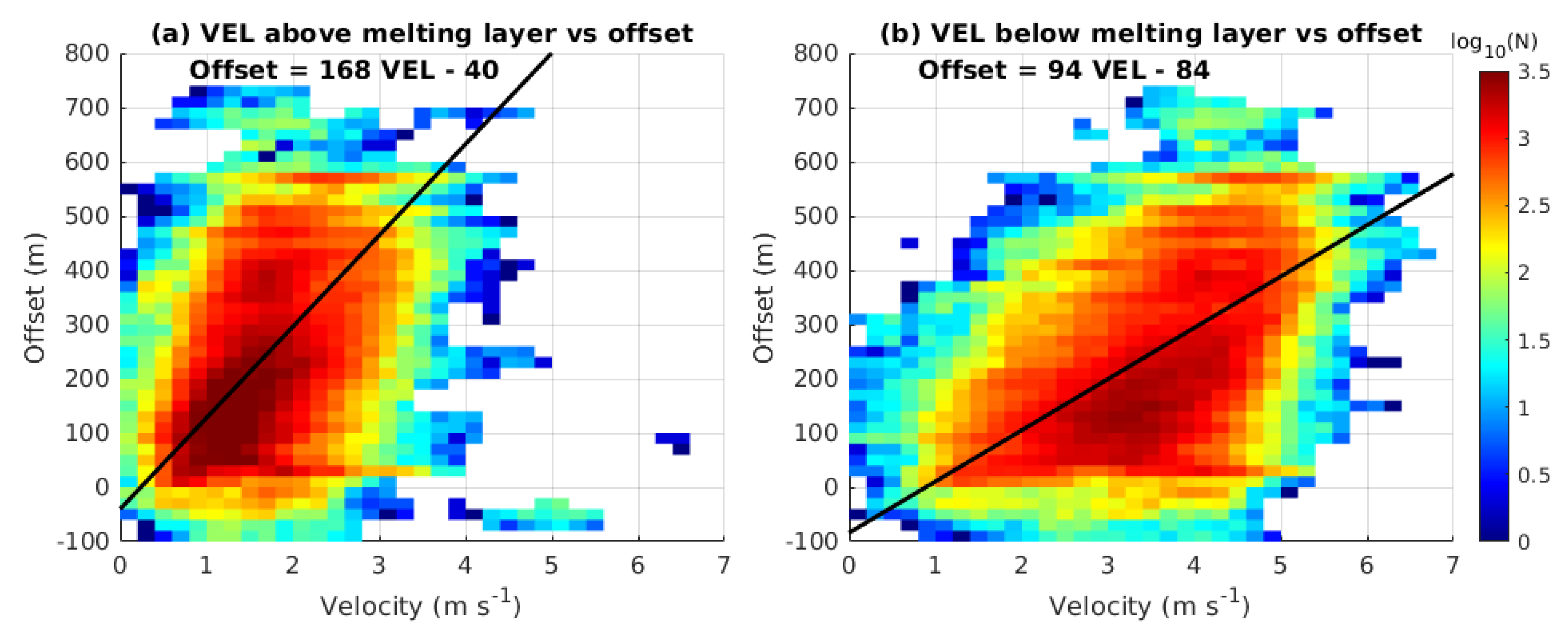
4.2. Offset between the Melting Layer and the 0 °C Isotherm
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vivekanandan, J.; Ellis, S.; Tsai, P.; Loew, E.; Lee, W.-C.; Emmett, J.; Dixon, M.; Burghart, C.; Rauenbuehler, S. A Wing Pod-Based Millimeter Wavelength Airborne Cloud Radar. Geosci. Instrum. Methods Data Syst. 2015, 4, 161–176. [Google Scholar] [CrossRef]
- Romatschke, U.; Dixon, M.; Tsai, P.; Loew, E.; Vivekanandan, J.; Emmett, J.; Rilling, R. The NCAR Airborne 94-GHz Cloud Radar: Calibration and Data Processing. arXiv 2021. [Google Scholar] [CrossRef]
- Brandes, E.A.; Ikeda, K. Freezing-Level Estimation with Polarimetric Radar. J. Appl. Meteorol. Climatol. 2004, 43, 1541–1553. [Google Scholar] [CrossRef]
- Lee, J.-E.; Jung, S.-H.; Kwon, S. Characteristics of the Bright Band Based on Quasi-Vertical Profiles of Polarimetric Observations from an S-Band Weather Radar Network. Remote Sens. 2020, 12, 4061. [Google Scholar] [CrossRef]
- Sanchez-Rivas, D.; Rico-Ramirez, M.A. Detection of the Melting Level with Polarimetric Weather Radar. Atmos. Meas. Tech. 2021, 14, 2873–2890. [Google Scholar] [CrossRef]
- Massmann, A.K.; Minder, J.R.; Garreaud, R.D.; Kingsmill, D.E.; Valenzuela, R.A.; Montecinos, A.; Fults, S.L.; Snider, J.R. The Chilean Coastal Orographic Precipitation Experiment: Observing the Influence of Microphysical Rain Regimes on Coastal Orographic Precipitation. J. Hydrometeorol. 2017, 18, 2723–2743. [Google Scholar] [CrossRef]
- Awaka, J.; Le, M.; Chandrasekar, V.; Yoshida, N.; Higashiuwatoko, T.; Kubota, T.; Iguchi, T. Rain Type Classification Algorithm Module for GPM Dual-Frequency Precipitation Radar. J. Atmos. Ocean. Technol. 2016, 33, 1887–1898. [Google Scholar] [CrossRef]
- Haynes, J.M. CloudSat 2C-PRECIP-COLUMN Data Product Process Description and Interface Control Document. Available online: http://www.cloudsat.cira.colostate.edu/sites/default/files/products/files/2C-PRECIP-COLUMN_PDICD.P1_R05.rev1_pdf (accessed on 21 April 2021).
- Le, M.; Chandrasekar, V. Hydrometeor Profile Characterization Method for Dual-Frequency Precipitation Radar Onboard the GPM. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3648–3658. [Google Scholar] [CrossRef]
- Albrecht, B.; Ghate, V.; Mohrmann, J.; Wood, R.; Zuidema, P.; Bretherton, C.; Schwartz, C.; Eloranta, E.; Glienke, S.; Donaher, S.; et al. Cloud System Evolution in the Trades—CSET. Bull. Am. Meteorol. Soc. 2019, 100, 93–121. [Google Scholar] [CrossRef] [PubMed]
- NCAR/EOL Remote Sensing Facility. CSET: NCAR HCR Radar Moments Data. Version 2.1; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2021. [Google Scholar]
- McFarquhar, G.M.; Bretherton, C.; Marchand, R.; Protat, A.; DeMott, P.J.; Alexander, S.P.; Roberts, G.C.; Twohy, C.H.; Toohey, D.; Siems, S.; et al. Observations of Clouds, Aerosols, Precipitation, and Surface Radiation over the Southern Ocean: An Overview of CAPRICORN, MARCUS, MICRE and SOCRATES. Bull. Am. Meteorol. Soc. 2020, 1, 1–92. [Google Scholar] [CrossRef]
- NCAR/EOL Remote Sensing Facility. SOCRATES: NCAR HCR Radar Moments Data. Version 2.1; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2021. [Google Scholar]
- Fuchs-Stone, Ž.; Raymond, D.J.; Sentić, S. OTREC2019: Convection Over the East Pacific and Southwest Caribbean. Geophys. Res. Lett. 2020, 47, e2020GL087564. [Google Scholar] [CrossRef]
- NCAR/EOL Remote Sensing Facility. OTREC: NCAR HCR Radar Moments Data. Version 2.2; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2021. [Google Scholar]
- Allabakash, S.; Lim, S.; Jang, B.-J. Melting Layer Detection and Characterization Based on Range Height Indicator–Quasi Vertical Profiles. Remote Sens. 2019, 11, 2848. [Google Scholar] [CrossRef]
- Li, L.; Sekelsky, S.M.; Reising, S.C.; Swift, C.T.; Durden, S.L.; Sadowy, G.A.; Dinardo, S.J.; Li, F.K.; Huffman, A.; Stephens, G.; et al. Retrieval of Atmospheric Attenuation Using Combined Ground-Based and Airborne 95-GHz Cloud Radar Measurements. J. Atmospheric Ocean. Technol. 2001, 18, 1345–1353. [Google Scholar] [CrossRef][Green Version]
- UCAR/NCAR-Earth Observing Laboratory. NSF/NCAR GV (HIAPER) QC Dropsonde Data. Version 4.0; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2016. [Google Scholar]
- UCAR/NCAR-Earth Observing Laboratory; Voemel, H. NCAR/EOL Quality Controlled Dropsonde Data. Version 1.1; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2018. [Google Scholar]
- UCAR/NCAR-Earth Observing Laboratory; Voemel, H. NCAR/EOL AVAPS Dropsonde QC Data. Version 1.0; UCAR/NCAR-Earth Observing Laboratory: Boulder, CO, USA, 2019. [Google Scholar]
- Vömel, H.; Goodstein, M.; Tudor, L.; Witte, J.; Fuchs-Stone, Ž.; Sentić, S.; Raymond, D.; Martinez-Claros, J.; Juračić, A.; Maithel, V.; et al. High-Resolution in Situ Observations of Atmospheric Thermodynamics Using Dropsondes during the Organization of Tropical East Pacific Convection (OTREC) Field Campaign. Earth Syst. Sci. Data Discuss. 2021, 17, 1107–1117. [Google Scholar] [CrossRef]
- Li, H.; Moisseev, D. Two Layers of Melting Ice Particles Within a Single Radar Bright Band: Interpretation and Implications. Geophys. Res. Lett. 2020, 47, e2020GL087499. [Google Scholar] [CrossRef]
- Killick, R.; Fearnhead, P.; Eckley, I.A. Optimal Detection of Changepoints With a Linear Computational Cost. J. Am. Stat. Assoc. 2012, 107, 1590–1598. [Google Scholar] [CrossRef]
- American Meteorological Society Icing Level-Glossary of Meteorology. Available online: https://glossary.ametsoc.org/wiki/Icing_level (accessed on 9 March 2021).
- Trujillo-Ortiz, A. Gmregress. MATLAB Central File Exchange 2018. Available online: https://www.mathworks.com/matlabcentral/fileexchange/27918-gmregress (accessed on 18 March 2018).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CSET (m) | SOCRATES (m) | OTREC (m) | |
|---|---|---|---|
| Mean | 169.83 | 156.44 | 322.91 |
| St Dev | 138.98 | 52.63 | 115.00 |
| RF01 | 326.15 | 140.52 | 248.44 |
| RF02 | 115.10 | 441.43 | |
| RF03 | 19.19 | 115.13 | 383.69 |
| RF04 | 172.68 | 134.93 | |
| RF05 | 110.60 | 95.91 | |
| RF06 | 134.09 | 326.40 | |
| RF07 | 249.11 | ||
| RF08 | 210.99 | 383.64 | |
| RF09 | 76.73 | 364.44 | |
| RF10 | 213.33 | 518.08 | |
| RF11 | 211.04 | 345.36 | |
| RF12 | 93.50 | 194.66 | 190.12 |
| RF13 | 152.76 | 364.60 | |
| RF14 | 76.67 | 192.24 | |
| RF15 | 173.20 | 288.07 | |
| RF16 | 240.48 | 383.75 | |
| RF17 | 364.65 | ||
| RF18 | 364.45 | ||
| RF19 | 172.71 | ||
| RF20 | 489.71 | ||
| RF21 | 440.80 | ||
| RF22 | 287.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romatschke, U. Melting Layer Detection and Observation with the NCAR Airborne W-Band Radar. Remote Sens. 2021, 13, 1660. https://doi.org/10.3390/rs13091660
Romatschke U. Melting Layer Detection and Observation with the NCAR Airborne W-Band Radar. Remote Sensing. 2021; 13(9):1660. https://doi.org/10.3390/rs13091660
Chicago/Turabian StyleRomatschke, Ulrike. 2021. "Melting Layer Detection and Observation with the NCAR Airborne W-Band Radar" Remote Sensing 13, no. 9: 1660. https://doi.org/10.3390/rs13091660
APA StyleRomatschke, U. (2021). Melting Layer Detection and Observation with the NCAR Airborne W-Band Radar. Remote Sensing, 13(9), 1660. https://doi.org/10.3390/rs13091660