
NRTK, PPP or Static, That Is the Question. Testing Different Positioning Solutions for GNSS Survey






Abstract
1. Introduction
2. Materials and Methods
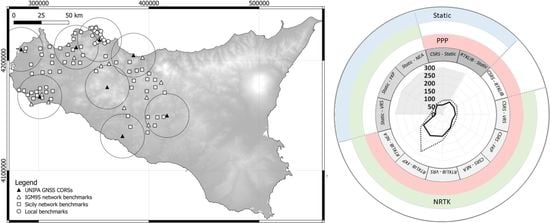
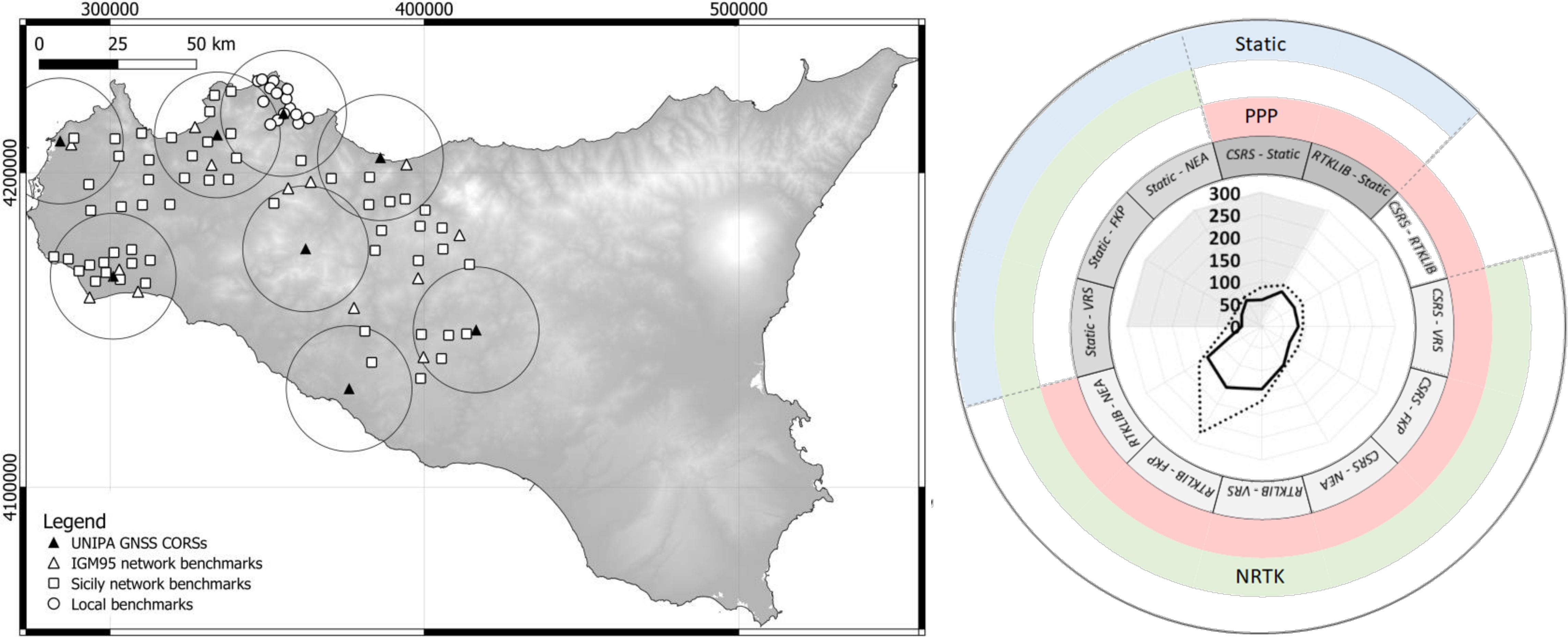
2.1. UNIPA GNSS CORS Network
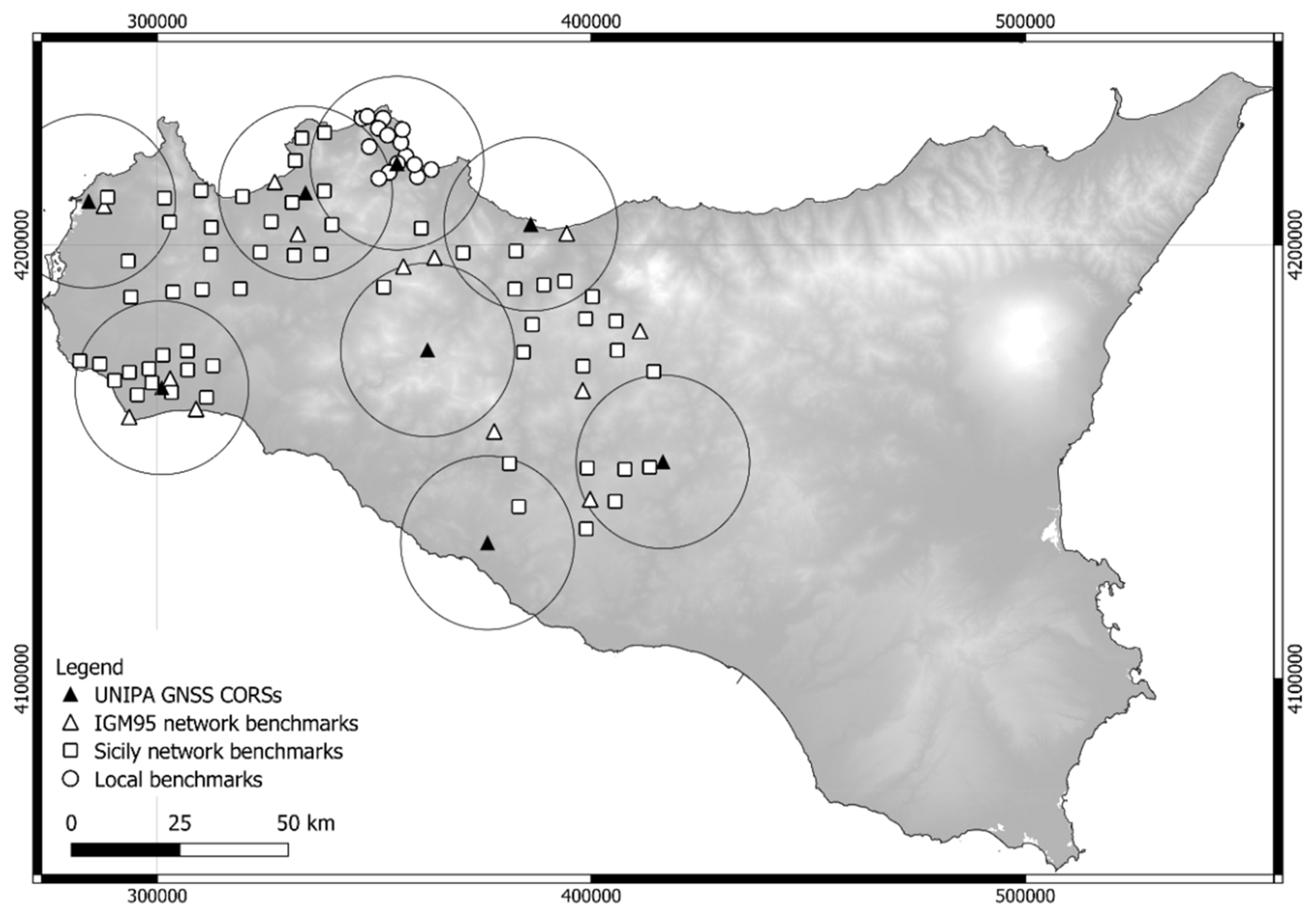
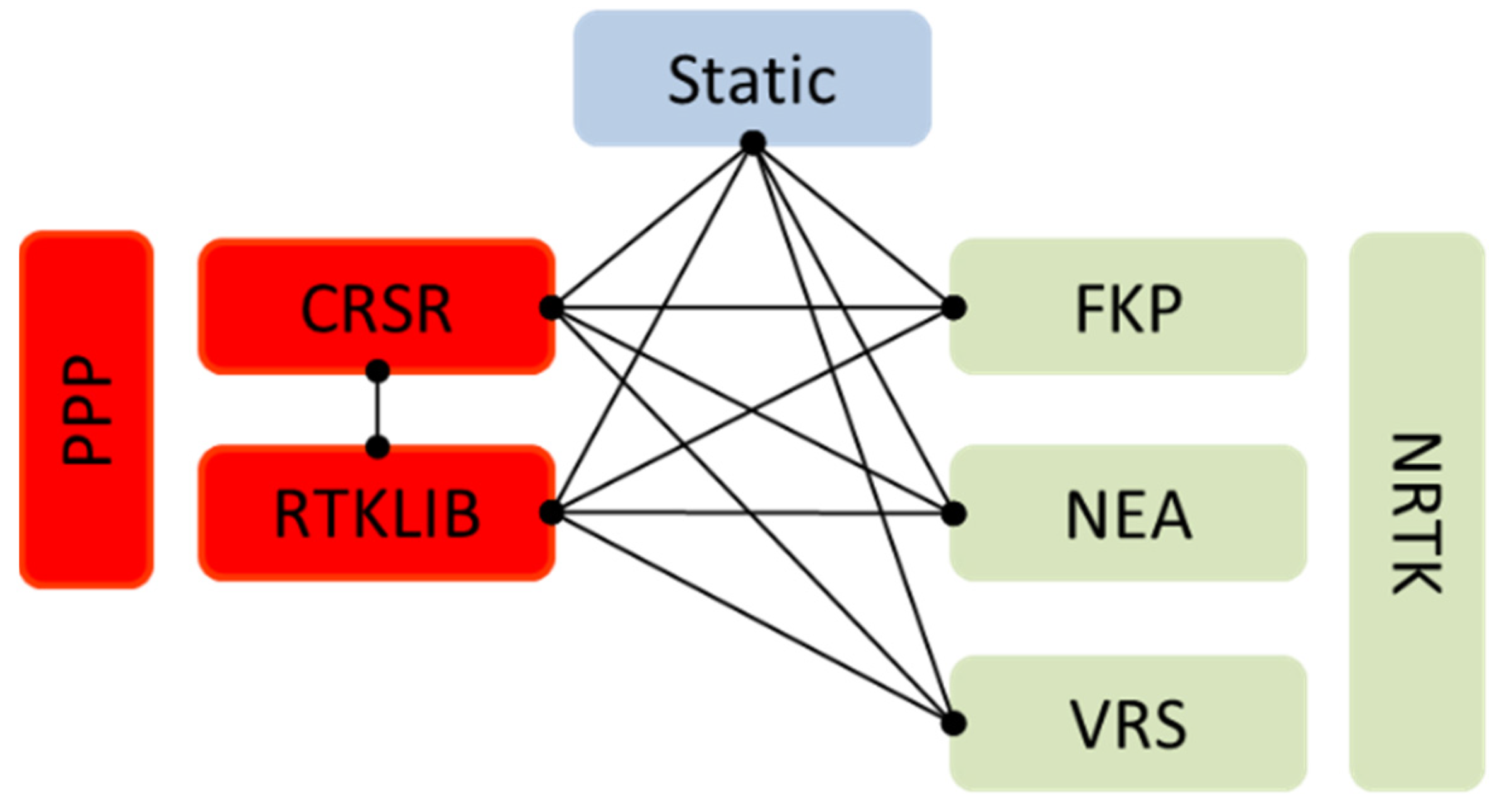
2.2. Static, NRTK Survey and Software Processing
2.3. PPP Software Processing
- -
- GDOP threshold is set to reject solutions with GDOP values higher than 30°, and a mask-angle equal to 10° is applied.
- -
- No ambiguity resolution strategy is used, since the PPP-AR (Ambiguity Resolution) function selectable in RTKLib software, was experimental at experimental at the time of data processing, providing unstable and inaccurate solution with respect to standard PPP according to the RTKLib manual. A detailed description of Ambiguity Resolution, in particular using GLONASS, is reported in [63].
- -
- The Phwindup (phase wind-up) option is set to correct the delay caused by the relative rotation between the satellite and receiver antennas.
- -
- Reject Ecl, is set to exclude the GPS Block IIA eclipsed satellites, that degrade the PPP solutions due to unpredicted behavior of yaw-attitude.
- -
- RAIM (Receiver Autonomous Integrity Monitoring Receiver Autonomous Integrity Monitoring) FDE (Fault Detection Fault Detection and Exclusion) detect and exclude possible outliers from the measurements set used for the solution computation.
- -
- Sat PCV (phase center variations) and Rec PVC, were set to consider the phase center variations of the satellite and the receiver, respectively. It requires the so-called “igs14.atx” file, provided by the IGS (International GNSS Service), containing the correction parameters of several types of antenna.
2.4. Data Analysis
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Meaning |
| AD | Anderson-Darling Test |
| APS | Automatic Precise Positioning Service |
| AR | Ambiguity Resolution |
| CC | Control Centre |
| CODE DIFF | Code-based differential |
| CORS | Continuously Operating Reference Station |
| COSMIC | Constellation Observing System for Meteorology, Ionosphere, and Climate |
| CSRS | Canadian Spatial Reference System |
| DEM | Digital Elevation Model |
| DInSAR | Differential InSAR |
| DOY | Day of Year |
| ETRF | European Terrestrial Reference System |
| EUREF | Regional Reference Frame sub-commission for Europe |
| FKP | Flächen-Korrektur-Parameter |
| FTP | File Transfer Protocol |
| GAMIT | GNSS at MIT, Massachusetts Institute of Technology |
| GBLOCK | Global Kalman filter |
| GIPSY-OASIS | GNSS-Inferred Positioning System and Orbit Analysis Simulation Software |
| GLONASS | GLObal NAvigation Satellite System |
| GNSMART | GNSS − State Monitoring And Representation Technique |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| InSAR | Interferometric SAR |
| IGM | Istituto Geografico Militare |
| IGS | International GNSS Service |
| ITRF | International Terrestrial Reference System |
| KS | Kolmogorov-Smirnov Test |
| MAC | Master Auxiliary Concepts |
| MRS | Multi Reference Station |
| MMS | Mobile Mapping System |
| NEA | Nearest |
| NMF | Niell Mapping Function |
| NRTK | Network-based Real Time Kinematic |
| PCV | Phase Center Variations |
| PTEC | Plasmaspheric Total Electron Content |
| PPP | Precise Point Positioning |
| RAIM FDE | Receiver Autonomous Integrity Monitoring Fault Detection and Exclusion |
| RDN | Rete Dinamica Nazionale |
| RTCM | Radio Technical Commission for Maritime Services |
| VRS | Virtual Reference Station |
| WGS84 | World Geodetic System 1984 |
References
- Leick, A. GPS Satellite Surveying; Wiley: Hoboken, NJ, USA, 1990. [Google Scholar]
- Mader, G.L. Rapid Static and Kinematic Global Positioning System Solutions Using the Ambiguity Function Technique. J. Geophys. Res. 1992, 97, 3271–3283. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice, 4th ed.; Springer: Wien, Austria, 1997; ISBN 978-3-211-82839-7. [Google Scholar]
- Xu, G. GPS: Theory, Algorithms and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-642-09181-0. [Google Scholar]
- Zhang, K.; Wu, F.; Wu, S.; Rizos, C.; Roberts, C.; Ge, L.; Yan, T.; Gordini, C.; Kealy, A.; Hale, M. Sparse or Dense: Challenges of Australian Network RTK. In Proceedings of the IGNSS, Surfers Paradise, Australia, 17–21 July 2006. [Google Scholar]
- Wanninger, L. Virtual Reference Stations (VRS). Gps Solut. 2003, 7, 143–144. [Google Scholar] [CrossRef]
- Fotopoulos, G.; Cannon, M.E. An Overview of Multi-Reference Station Methods for Cm-Level Positioning. GPS Solut. 2001, 4. [Google Scholar] [CrossRef]
- Keenan, C.R.; Zebhauser, B.E.; Euler, H.-J.; Wübbena, G. Using the Information from Reference Station Networks: A Novel Approach Conforming to RTCM V2.3 and Future V3.0. In Proceedings of the 2002 IEEE Position Location and Navigation Symposium (IEEE Cat. No.02CH37284), Palm Springs, CA, USA, 15–18 April 2002; pp. 320–327. [Google Scholar]
- Kim, J.; Song, J.; No, H.; Han, D.; Kim, D.; Park, B.; Kee, C. Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flächen Korrektur Parameter Correction. ISPRS Int. J. Geo-Inf. 2017, 6, 222. [Google Scholar] [CrossRef]
- Garrido, M.S.; Giménez, E.; de Lacy, M.C.; Gil, A.J. Testing Precise Positioning Using RTK and NRTK Corrections Provided by MAC and VRS Approaches in SE Spain. J. Spat. Sci. 2011, 56, 169–184. [Google Scholar] [CrossRef]
- Tusat, E. A Comparison of the Accuracy of VRS and Static GPS Measurement Results for Production of Topographic Map and Spatial Data: A Case Study on CORS-TR. Teh. Vjesn. 2018, 25, 158–163. [Google Scholar] [CrossRef]
- Prochniewicz, D.; Szpunar, R.; Kozuchowska, J.; Szabo, V.; Staniszewska, D.; Walo, J. Performance of Network-Based GNSS Positioning Services in Poland: A Case Study. J. Surv. Eng. 2020, 146, 05020006. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. B Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. Gps Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Ebner, R.; Featherstone, W.E. How Well Can Online GPS PPP Post-Processing Services Be Used to Establish Geodetic Survey Control Networks. J. Appl. Geod. 2008, 2, 149–157. [Google Scholar] [CrossRef]
- Anquela, A.B.; Martín, A.; Berné, J.L.; Padín, J. Gps and Glonass Static and Kinematic PPP Results. J. Surv. Eng. 2013, 139, 47–58. [Google Scholar] [CrossRef]
- Yigit, C.O.; Gikas, V.; Alcay, S.; Ceylan, A. Performance Evaluation of Short to Long Term GPS, GLONASS and GPS/GLONASS Postprocessed PPP. Surv. Rev. 2014, 46, 155–166. [Google Scholar] [CrossRef]
- Abd Rabbou, M.; El-Rabbany, A. Performance Analysis of Precise Point Positioning Using Multi-Constellation GNSS: GPS, GLONASS, Galileo and BeiDou. Surv. Rev. 2017, 49, 39–50. [Google Scholar] [CrossRef]
- Angrisano, A.; Dardanelli, G.; Innac, A.; Pisciotta, A.; Pipitone, C.; Gaglione, S. Performance Assessment of PPP Surveys with Open Source Software Using the GNSS GPS-GLONASS-Galileo Constellations. Appl. Sci. 2020, 10, 5420. [Google Scholar] [CrossRef]
- Ocalan, T.; Erdogan, B.; Tunalioglu, N.; Durdag, U.M. Accuracy Investigation of PPP Method versus Relative Positioning Using Different Satellite Ephemerides Products near/under Forest Environment. Earth Sci. Res. J. 2017, 20, D1–D9. [Google Scholar] [CrossRef]
- Guo, Q. Precision Comparison and Analysis of Four Online Free PPP Services in Static Positioning and Tropospheric Delay Estimation. Gps Solut. 2015, 19, 537–544. [Google Scholar] [CrossRef]
- Astudillo, J.M.; Lau, L.; Tang, Y.-T.; Moore, T. Analysing the Zenith Tropospheric Delay Estimates in On-Line Precise Point Positioning (PPP) Services and PPP Software Packages. Sensors 2018, 18, 580. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Teferle, F.N.; Dodson, A.H. Performance of Precise Point Positioning with Ambiguity Resolution for 1- to 4-Hour Observation Periods. Surv. Rev. 2010, 42, 155–165. [Google Scholar] [CrossRef]
- El-Mowafy, A. Analysis of Web-Based GNSS Post-Processing Services for Static and Kinematic Positioning Using Short Data Spans. Surv. Rev. 2011, 43, 535–549. [Google Scholar] [CrossRef]
- Gandolfi, S.; Tavasci, L.; Poluzzi, L. Study on GPS–PPP Precision for Short Observation Sessions. GPS Solut. 2017, 21, 887–896. [Google Scholar] [CrossRef]
- Moreno, B.; Radicella, S.; de Lacy, M.C.; Herraiz, M.; Rodriguez-Caderot, G. On the Effects of the Ionospheric Disturbances on Precise Point Positioning at Equatorial Latitudes. GPS Solut 2011, 15, 381–390. [Google Scholar] [CrossRef]
- Afraimovich, E.L.; Ishin, A.B.; Tinin, M.V.; Yasyukevich, Y.V.; Jin, S.G. First Evidence of Anisotropy of GPS Phase Slips Caused by the Mid-Latitude Field-Aligned Ionospheric Irregularities. Adv. Space Res. 2011, 47, 1674–1680. [Google Scholar] [CrossRef]
- Demyanov, V.V.; Yasyukevich, Y.V.; Jin, S.; Sergeeva, M.A. The Second-Order Derivative of GPS Carrier Phase as a Promising Means for Ionospheric Scintillation Research. Pure Appl. Geophys. 2019, 176, 4555–4573. [Google Scholar] [CrossRef]
- Jin, S.; Gao, C.; Yuan, L.; Guo, P.; Calabia, A.; Ruan, H.; Luo, P. Long-Term Variations of Plasmaspheric Total Electron Content from Topside GPS Observations on LEO Satellites. Remote Sens. 2021, 13, 545. [Google Scholar] [CrossRef]
- TopNET live. Available online: https://www.topconpositioning.com/it/enterprise-services-and-subscriptions/gnss-correction-services/topnet-live (accessed on 31 March 2021).
- Mageed, K.M.A. Comparison of GPS Commercial Software Packages to Processing Static Baselines up to 30 Km. Arpn J. Eng. Appl. Sci. 2015, 10, 10640–10650. [Google Scholar]
- Andritsanos, V.D.; Arabatzi, O.; Gianniou, M.; Pagounis, V.; Tziavos, I.N.; Vergos, G.S.; Zacharis, E. Comparison of Various GPS Processing Solutions toward an Efficient Validation of the Hellenic Vertical Network: The Elevation Project. J. Surv. Eng. 2016, 142. [Google Scholar] [CrossRef]
- Dardanelli, G.; Lo Brutto, M.; Pipitone, C. GNSS Cors Network of the University of Palermo: Design and First Analysis of Data. Geogr. Tech. 2020, 15, 43–69. [Google Scholar] [CrossRef]
- Baroni, L.; Cauli, F.; Farolfi, G.; Maseroli, R. Final Results of the Italian «Rete Dinamica Nazionale» (RDN) of Istituto Geografico Militare Italiano (IGMI) and Its Alignment to ETRF2000. Boll. Di Geod. E Sci. Affin. 2009, 68, 287–317. [Google Scholar]
- Kenyeres, A.; Bellet, J.G.; Bruyninx, C.; Caporali, A.; de Doncker, F.; Droscak, B.; Duret, A.; Franke, P.; Georgiev, I.; Bingley, R.; et al. Regional Integration of Long-Term National Dense GNSS Network Solutions. GPS Solut. 2019, 23. [Google Scholar] [CrossRef]
- Ammoscato, A.; Corsale, R.; Dardanelli, G.; Scianna, A.; Villa, B. GPS-GIS Integrated System for Electromagnetic Pollution. Int. Arch. Photogramm. 2008, 37, 491–498. [Google Scholar]
- Dardanelli, G.; Carella, M. Integrated surveyng with mobile mapping system, egnos, ntrk and laser technologies in the Park “Ninni Cassara” in Palermo. ISPRS J. Photogramm. Remote Sens. 2013, 2, 95–100. [Google Scholar] [CrossRef]
- Dardanelli, G.; Paliaga, S.; Allegra, M.; Carella, M.; Giammarresi, V. Geomatic Applications Tourban Park in Palermo. Geogr. Tech. 2015, 10, 28–43. [Google Scholar]
- Dardanelli, G.; La Loggia, G.; Perfetti, N.; Capodici, F.; Puccio, L.; Maltese, A. Monitoring Displacements of an Earthen Dam Using GNSS and Remote Sensing. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XVI; International Society for Optics and Photonics: Bellingham, WA, USA, 2014; Volume 9239. [Google Scholar]
- Pipitone, C.; Maltese, A.; Dardanelli, G.; Brutto, M.L.; Loggia, G.L. Monitoring Water Surface and Level of a Reservoir Using Different Remote Sensing Approaches and Comparison with Dam Displacements Evaluated via GNSS. Remote Sens. 2018, 10, 71. [Google Scholar] [CrossRef]
- Stocchi, P.; Antonioli, F.; Montagna, P.; Pepe, F.; Lo Presti, V.; Caruso, A.; Corradino, M.; Dardanelli, G.; Renda, P.; Frank, N.; et al. A Stalactite Record of Four Relative Sea-Level Highstands during the Middle Pleistocene Transition. Quat. Sci. Rev. 2017, 173, 92–100. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Maltese, A.; Carlson, T.N.; Provenzano, G.; Pavlides, A.; Ciraolo, G.; Hristopulos, D.; Capodici, F.; Chalkias, C.; Dardanelli, G.; et al. Exploring the Use of Unmanned Aerial Vehicles (UAVs) with the Simplified ‘Triangle’ Technique for Soil Water Content and Evaporative Fraction Retrievals in a Mediterranean Setting. Int. J. Remote Sens. 2020, 42, 1–20. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Barreca, G.; Bruno, V.; Dardanelli, G.; Guglielmino, F.; Lo Brutto, M.; Mattia, M.; Pipitone, C.; Rossi, M. An Integrated Geodetic and InSAR Technique for the Monitoring and Detection of Active Faulting in Southwestern Sicily. Ann. Geophys. 2020, 63. [Google Scholar] [CrossRef]
- Pipitone, C.; Dardanelli, G.; Lo Brutto, M.; Bruno, V.; Mattia, M.; Guglielmino, F.; Rossi, M.; Barreca, G. Use of CORS Time Series for Geodynamics Applications in Western Sicily (Italy). In Proceedings of the R3 in Geomatics: Research, Results and Review, October 2020, Naples Italy; Parente, C., Troisi, S., Vettore, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 61–76. [Google Scholar]
- Surace, L. The New National Geodetic Network IGM95: Analysis of the Results. Boll. Di Geod. E Sci. Affin. 1997, 56, 357–378. [Google Scholar]
- Dawidowicz, K.; Krzan, G.; Świątek, K. Relative Gps/Glonass Coordinates Determination in Urban Areas–Accuracy Anaysis. In Proceedings of the15th International Multidisciplinary Scientific GeoConference SGEM 2015, Albena, Bulgaria, 18–24 June 2015; Volume 2, pp. 423–430. [Google Scholar]
- Uradziński, M.; Bakuła, M. Assessment of Static Positioning Accuracy Using Low-Cost Smartphone GPS Devices for Geodetic Survey Points’ Determination and Monitoring. Appl. Sci. 2020, 10, 5308. [Google Scholar] [CrossRef]
- GOAD, C.C. A Modified Hopfield Tropospheric Refraction Correction Model. In Proceedings of the Fall Annual Meeting American Geophysical Union, San Francisco, CA, USA, 12–17 December 1974. [Google Scholar]
- Wübbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise Point Positioning Using State-Space Representation in RTK Networks. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION-GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; Volume 2005, pp. 2584–2594. [Google Scholar]
- Hopfield, H.S. Two-Quartic Tropospheric Refractivity Profile for Correcting Satellite Data. J. Geophys. Res. 1969, 74, 4487–4499. [Google Scholar] [CrossRef]
- Benciolini, B.; Biagi, L.; Crespi, M.; Manzino, A.; Roggero, M. Linee Guida per La Realizzazione Di Reti Di Stazioni Permanenti Di Servizio. Boll. Di Geod. E Sci. Affin. 2006, 65, 90–121. [Google Scholar]
- Johnson, P.M.; Tjahjono, D. Assessing Software Review Meetings: A Controlled Experimental Study Using CSRS. In Proceedings of the 19th International Conference on Software Engineering, Boston, MA, USA, 17 May 1997; Association for Computing Machinery: New York, NY, USA, 1997; pp. 118–127. [Google Scholar]
- Tétreault, P.; Kouba, J.; Héroux, P.; Legree, P. CSRS-PPP: An Internet Service for GPS User Access to the Canadian Spatial Reference Frame. Geomatica 2005, 59, 17–28. [Google Scholar]
- Dawidowicz, K.; Krzan, G. Coordinate Estimation Accuracy of Static Precise Point Positioning Using On-Line PPP Service, a Case Study. Acta Geod. Et Geophys. 2014, 49, 37–55. [Google Scholar] [CrossRef]
- Takasu, T.; Kubo, N.; Yasuda, A. Development, Evaluation and Application of RTKLIB: A Program Library for RTK-GPS. In Proceedings of the GPS/GNSS Symposium, Tokyo, Japan, 20–22 November 2007; pp. 213–218. [Google Scholar]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef]
- Liu, T.; Li, B. Single-Frequency BDS/GPS RTK with Low-Cost U-Blox Receivers. In Proceedings of the 2017 Forum on Cooperative Positioning and Service (CPGPS 2017), Harbin, China, 19–21 May 2017; pp. 232–238. [Google Scholar]
- Cina, A.; Dabove, P.; Manzino, A.M.; Piras, M. Augmented Positioning with CORSs Network Services Using GNSS Mass-Market Receivers. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 359–366. [Google Scholar]
- Mahato, S.; Santra, A.; Dan, S.; Rakshit, P.; Banerjee, P.; Bose, A. Preliminary Results on the Performance of Cost-Effective GNSS Receivers for RTK. In Proceedings of the 2019 URSI Asia-Pacific Radio Science Conference (AP-RASC), New Delhi, India, 9–15 March 2019. [Google Scholar]
- Stephenson, S.; Meng, X.; Moore, T.; Baxendale, A.; Edwards, T. A Fairy Tale Approach to Cooperative Vehicle Positioning. In Proceedings of the 2014 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 431–440. [Google Scholar]
- Cefalo, R.; Novelli, A.; Sluga, T.; Snider, P.; Tarantino, E.; Tommasi, A. Static and Kinematic Surveys Using GNSS Multi-Constellation Receivers and GPS, GLONASS and Galileo Data. In Proceedings of the Computational Science and Its Applications–ICCSA, Melbourne, Australia, 2–5 July 2018; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; pp. 349–363. [Google Scholar] [CrossRef]
- GLONASS Ambiguity Resolution: Identical Receivers. Available online: https://rtklibexplorer.wordpress.com/2016/04/30/glonass-ambiguity-resolution-identical-receivers/ (accessed on 31 March 2021).
- Saastamoinen, J. Atmospheric Correction for the Troposphere and Stratosphere in Radio Ranging Satellites. In The Use of Artificial Satellites for Geodesy; American Geophysical Union (AGU): Washington, WA, USA, 1972; pp. 247–251. ISBN 978-1-118-66364-6. [Google Scholar]
- Niell, A.E. Global Mapping Functions for the Atmosphere Delay at Radio Wavelengths. J. Geophys. Res. Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Herring, T.A. Modeling Atmospheric Delays in the Analysis of Space Geodetic Data. In Procedures of Refraction of Transatmospheric Simals in Geodesy; De Munck, J.C., Spoelstra, T.A., Eds.; Netherlands Geodetic Commission Publications on Geodesy: Delft, The Netherlands, 1992; Volume 36. [Google Scholar]
- Specht, M. Statistical Distribution Analysis of Navigation Positioning System Errors—Issue of the Empirical Sample Size. Sensors 2020, 20, 7144. [Google Scholar] [CrossRef]
- Mertikas, S.; Wells, D.; Leenhouts, P. Treatment of Navigational Accuracies: Proposals for the Future. Navigation 1985, 32, 68–84. [Google Scholar] [CrossRef]
- Miller, J. Short Report: Reaction Time Analysis with Outlier Exclusion: Bias Varies with Sample Size. Q. J. Exp. Psychol. Sect. A 1991, 43, 907–912. [Google Scholar] [CrossRef]
- Feng, Y. Regression and Hypothesis Tests for Multivariate GNSS State Time Series. JGPS 2012, 11, 33–45. [Google Scholar] [CrossRef][Green Version]
- Anderson, T.W.; Darling, D.A. A Test of Goodness of Fit. J. Am. Stat. Assoc. 1954, 49, 765–769. [Google Scholar] [CrossRef]
- Cramér, H. On the composition of elementary errors: First paper: Mathematical deductions. Scand. Actuar. J. 1928, 1928, 13–74. [Google Scholar] [CrossRef]
- Smirnov, N. Table for Estimating the Goodness of Fit of Empirical Distributions. Ann. Math. Stat. 1948, 19, 279–281. [Google Scholar] [CrossRef]
- Lilliefors, H.W. On the Kolmogorov-Smirnov Test for Normality with Mean and Variance Unknown. J. Am. Stat. Assoc. 1967, 62, 399–402. [Google Scholar] [CrossRef]
- Karson, M. Handbook of Methods of Applied Statistics. Volume I: Techniques of Computation Descriptive Methods, and Statistical Inference. Volume II: Planning of Surveys and Experiments. I. M.; Chakravarti, R.G. Laha, and J.; Roy, New York, John Wiley; 1967, $9.00. J. Am. Stat. Assoc. 1968, 63, 1047–1049. [Google Scholar] [CrossRef]
- Stephens, M.A. EDF Statistics for Goodness of Fit and Some Comparisons. J. Am. Stat. Assoc. 1974, 69, 730–737. [Google Scholar] [CrossRef]
- Joanes, D.N.; Gill, C.A. Comparing Measures of Sample Skewness and Kurtosis. J. R. Stat. Soc. Series D (Stat.) 1998, 47, 183–189. [Google Scholar] [CrossRef]
- Evans, J.D. Straightforward Statistics for the Behavioral Sciences; Brooks/Cole Pub. Co.: Pacific Grove, CA, USA, 1996; ISBN 978-0-534-23100-2. [Google Scholar]
- Gut, A. An Intermediate Course in Probability. In Springer Texts in Statistics, 2nd ed.; Springer: New York, NY, USA, 2009; ISBN 978-1-4419-0161-3. [Google Scholar]
- The Precise Point Positioning Software Centre—Online PPP Services. Available online: http://www2.unb.ca/gge/Resources/PPP/OnlinePPPs.html (accessed on 31 March 2021).
- MagicGNSS. Available online: https://magicgnss.gmv.com/ (accessed on 31 March 2021).
- Ibanez, D.; Rovira-Garcia, A.; Sanz, J.; Juan, J.M.; Gonzalez-Casado, G.; Jimenez-Banos, D.; Lopez-Echazarreta, C.; Lapin, I. The GNSS Laboratory Tool Suite (GLAB) Updates: SBAS, DGNSS and Global Monitoring System. In Proceedings of the 2018 9th ESA Workshop on Satellite NavigationTechnologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 5–7 December 2018; pp. 1–11. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Min Max (mm) | Static CSRS | Static RTKLIB | RTKLIB CSRS | Static VRS | Static FKP | Static NEA | CSRS VRS | CSRS FKP | CSRS NEA | RTKLIB VRS | RTKLIB FKP | RTKLIB NEA |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ΔN | −50 100 | −409 133 | −107 116 | −47 110 | −60 36 | −32 41 | −78 105 | −70 56 | −75 54 | −85 433 | −209 585 | −82 652 |
| ΔE | −184 141 | −606 462 | −603 745 | −148 190 | −121 118 | −149 78 | −131 170 | −106 122 | −169 101 | −492 580 | −782 583 | −697 653 |
| Δh | −185 346 | −375 219 | −402 298 | −206 187 | −137 173 | −135 174 | −130 203 | −170 208 | −120 210 | −318 504 | −166 1328 | −245 480 |
| R2 | Static CSRS | Static RTKLIB | RTKLI CSRS | Static VRS | Static FKP | Static NEA | CSRS VRS | CSRS FKP | CSRS NEA | RTKLIB VRS | RTKLIB FKP | RTKLIB NEA |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ΔN | 0.81 | 0.93 | 0.67 | 0.30 | 0.74 | 0.45 | ||||||
| ΔE | 0.57 | 0.30 | 1.00 | 0.39 | 0.20 | 0.29 | 0.23 | 0.58 | 0.34 | 0.21 | ||
| Δh | 0.43 | 0.21 | 0.59 | 0.69 | 0.84 | 0.23 | 0.54 | 0.64 | 0.77 |
| Min Max (mm) | Static CSRS | Static RTKLIB | RTKLIB CSRS | Static VRS | Static FKP | Static NEA | CSRS VRS | CSRS FKP | CSRS NEA | RTKLIB VRS | RTKLIB FKP | RTKLIB NEA |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ΔN | −24 54 | −353 46 | −42 67 | −38 40 | −52 29 | −20 31 | −23 52 | −33 56 | −37 43 | −42 355 | −124 374 | −36 431 |
| ΔE | −92 141 | −418 258 | −201 341 | −43 118 | −82 34 | −51 78 | −106 151 | −32 122 | −42 101 | −173 580 | −481 583 | −269 653 |
| Δh | −33 212 | −204 219 | −120 298 | −61 69 | −44 173 | −49 174 | −69 203 | −23 208 | −96 210 | −76 504 | −166 511 | −120 480 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dardanelli, G.; Maltese, A.; Pipitone, C.; Pisciotta, A.; Lo Brutto, M. NRTK, PPP or Static, That Is the Question. Testing Different Positioning Solutions for GNSS Survey. Remote Sens. 2021, 13, 1406. https://doi.org/10.3390/rs13071406
Dardanelli G, Maltese A, Pipitone C, Pisciotta A, Lo Brutto M. NRTK, PPP or Static, That Is the Question. Testing Different Positioning Solutions for GNSS Survey. Remote Sensing. 2021; 13(7):1406. https://doi.org/10.3390/rs13071406
Chicago/Turabian StyleDardanelli, Gino, Antonino Maltese, Claudia Pipitone, Alessandro Pisciotta, and Mauro Lo Brutto. 2021. "NRTK, PPP or Static, That Is the Question. Testing Different Positioning Solutions for GNSS Survey" Remote Sensing 13, no. 7: 1406. https://doi.org/10.3390/rs13071406
APA StyleDardanelli, G., Maltese, A., Pipitone, C., Pisciotta, A., & Lo Brutto, M. (2021). NRTK, PPP or Static, That Is the Question. Testing Different Positioning Solutions for GNSS Survey. Remote Sensing, 13(7), 1406. https://doi.org/10.3390/rs13071406