
Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts


 and
and
Abstract
1. Introduction
2. Prediction of Propagation Loss in Oceanic Ducts
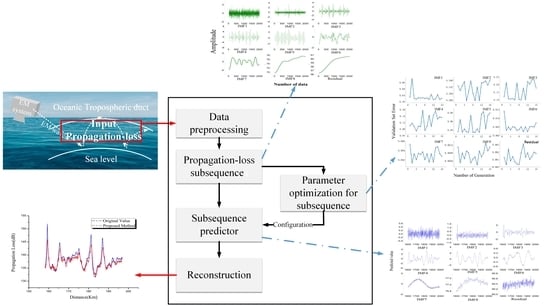
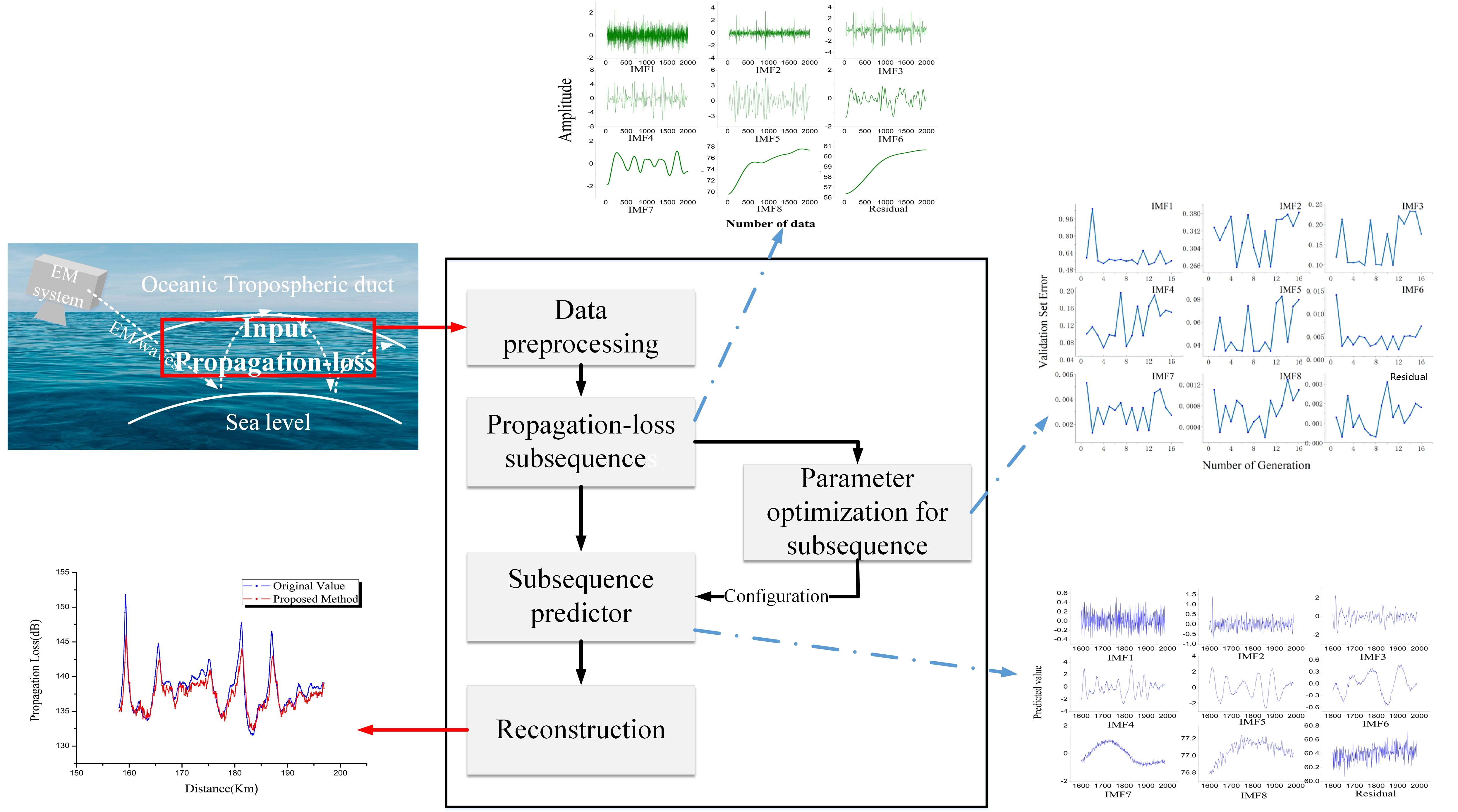
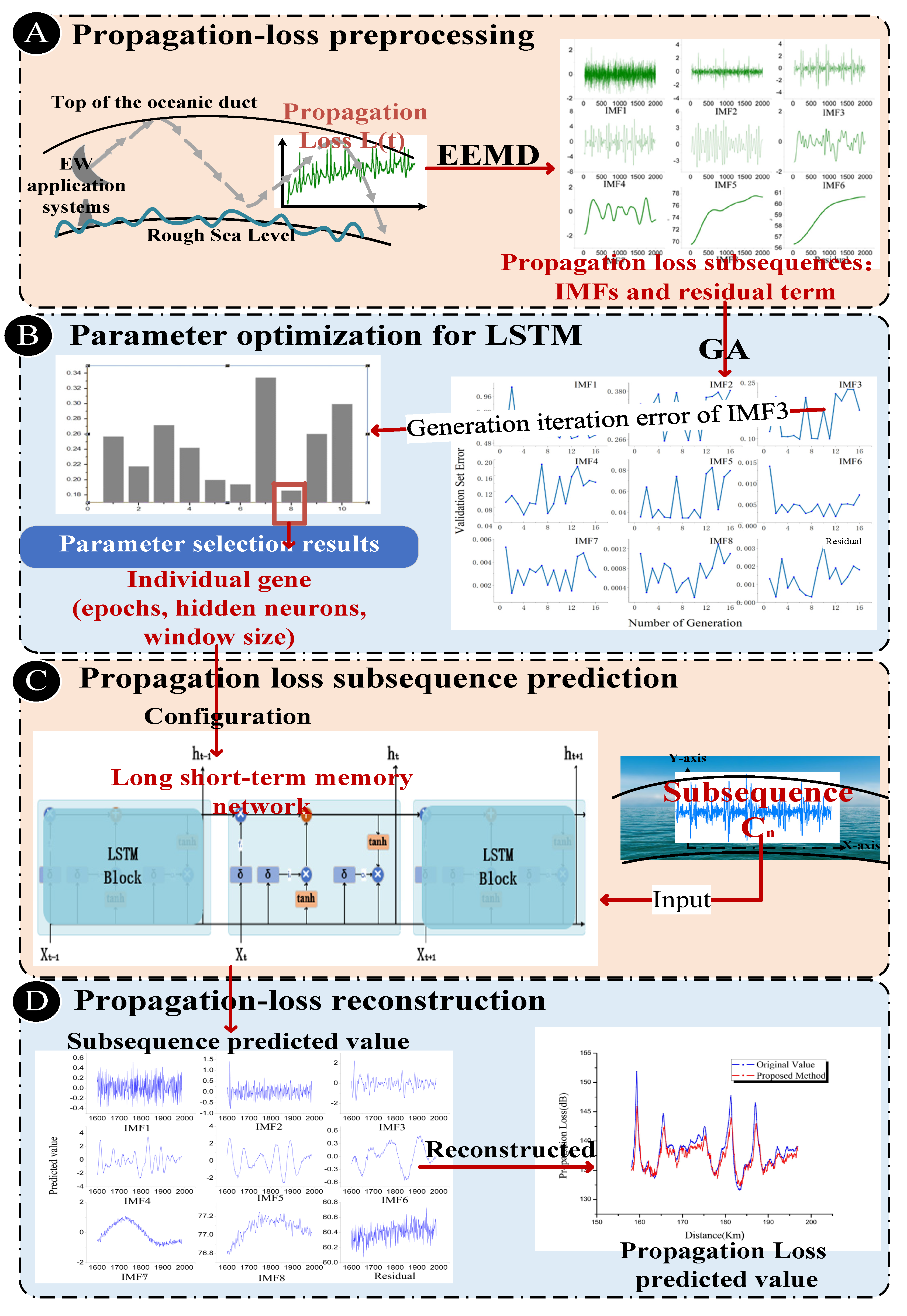
2.1. Overall Structure of the Proposed Propagation-Loss-Prediction Method
- A.
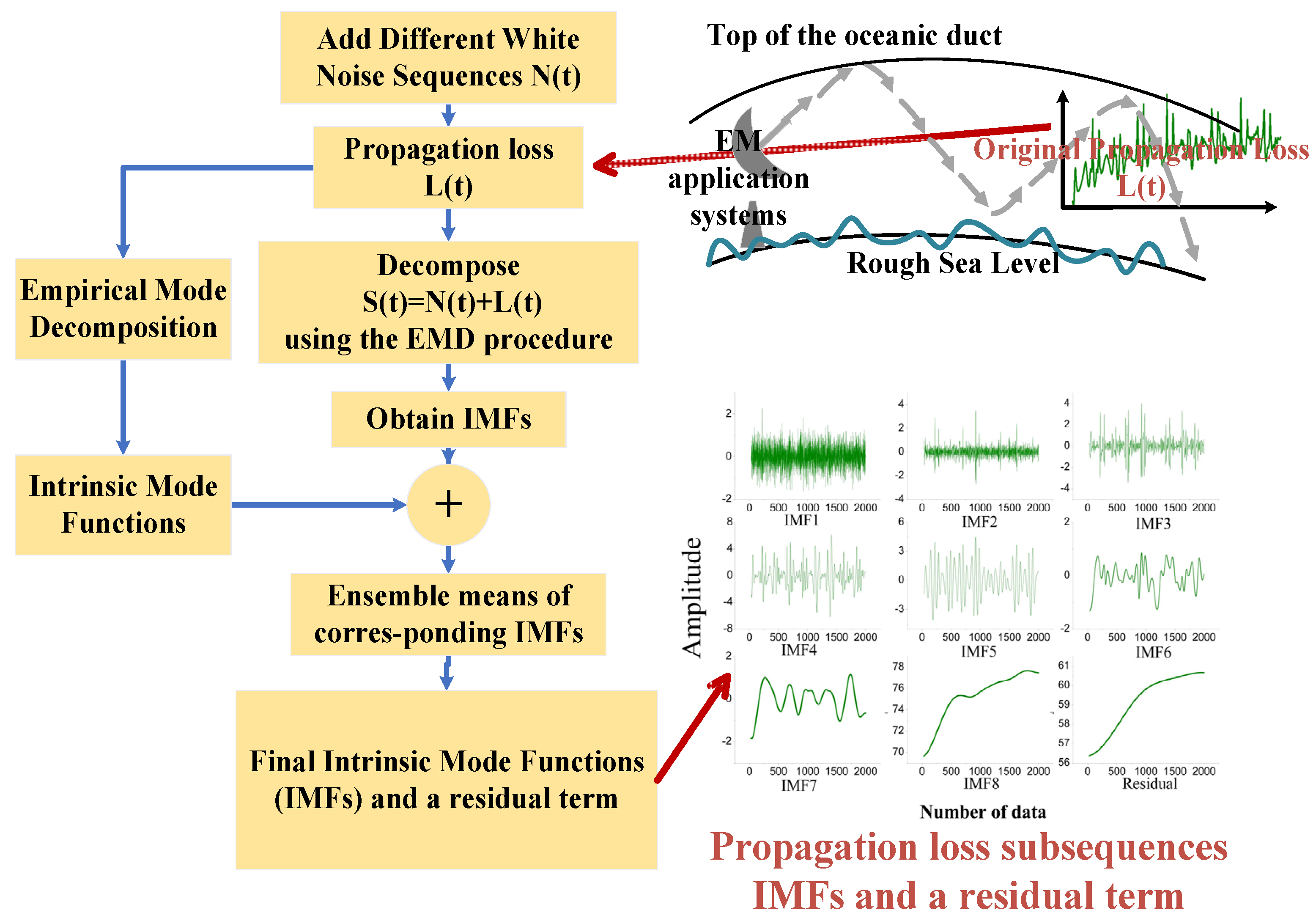
- Propagation-loss preprocessing. As a data preprocessing method, EEMD decomposes the original propagation loss sequence () into a limited number of subsequences called IMFs; and the last IMF is the residual term :N represents the total number of propagation loss subsequences. Meanwhile, the EEMD reduces noise and stabilizes the propagation-loss sequence.
- B.
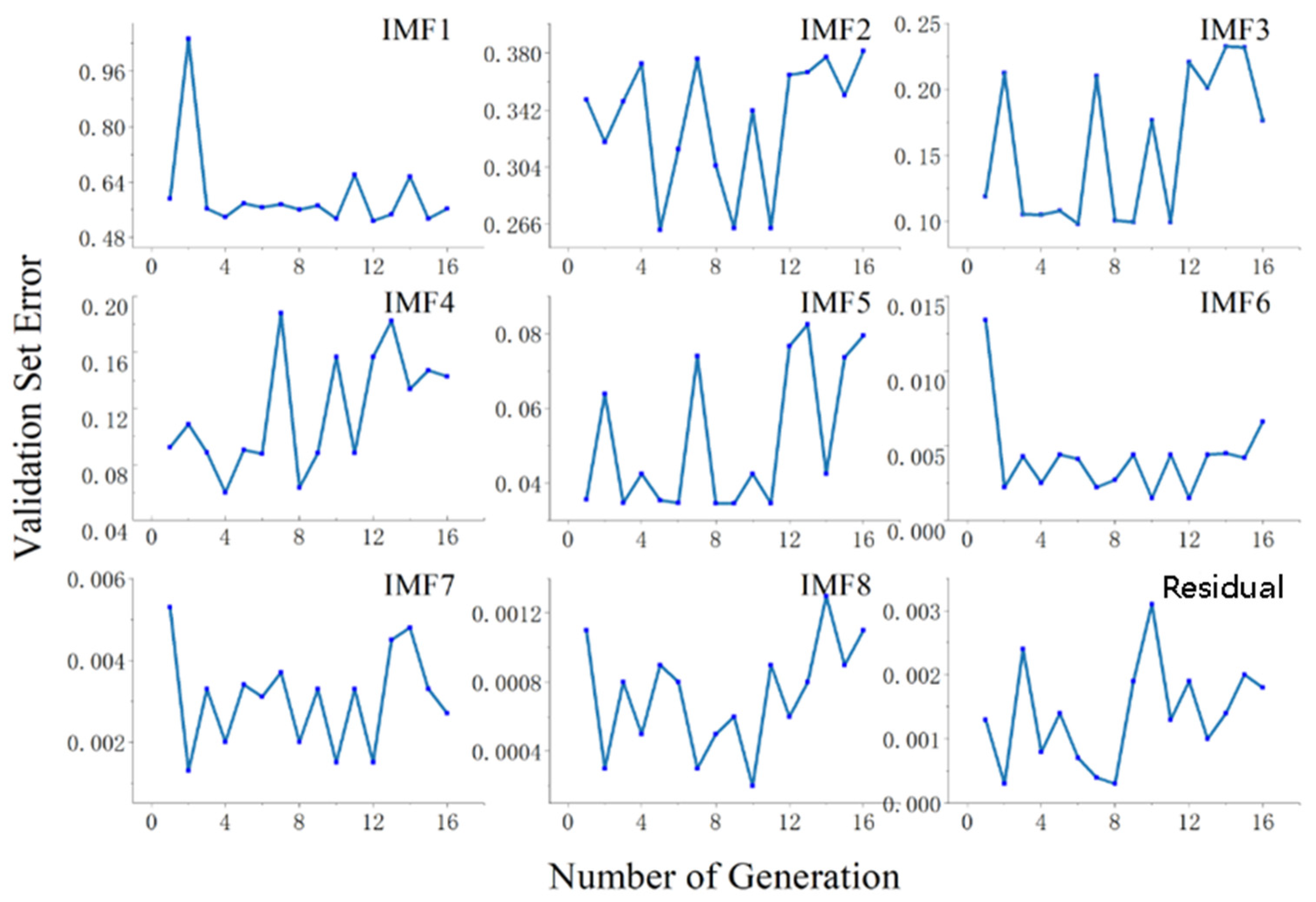
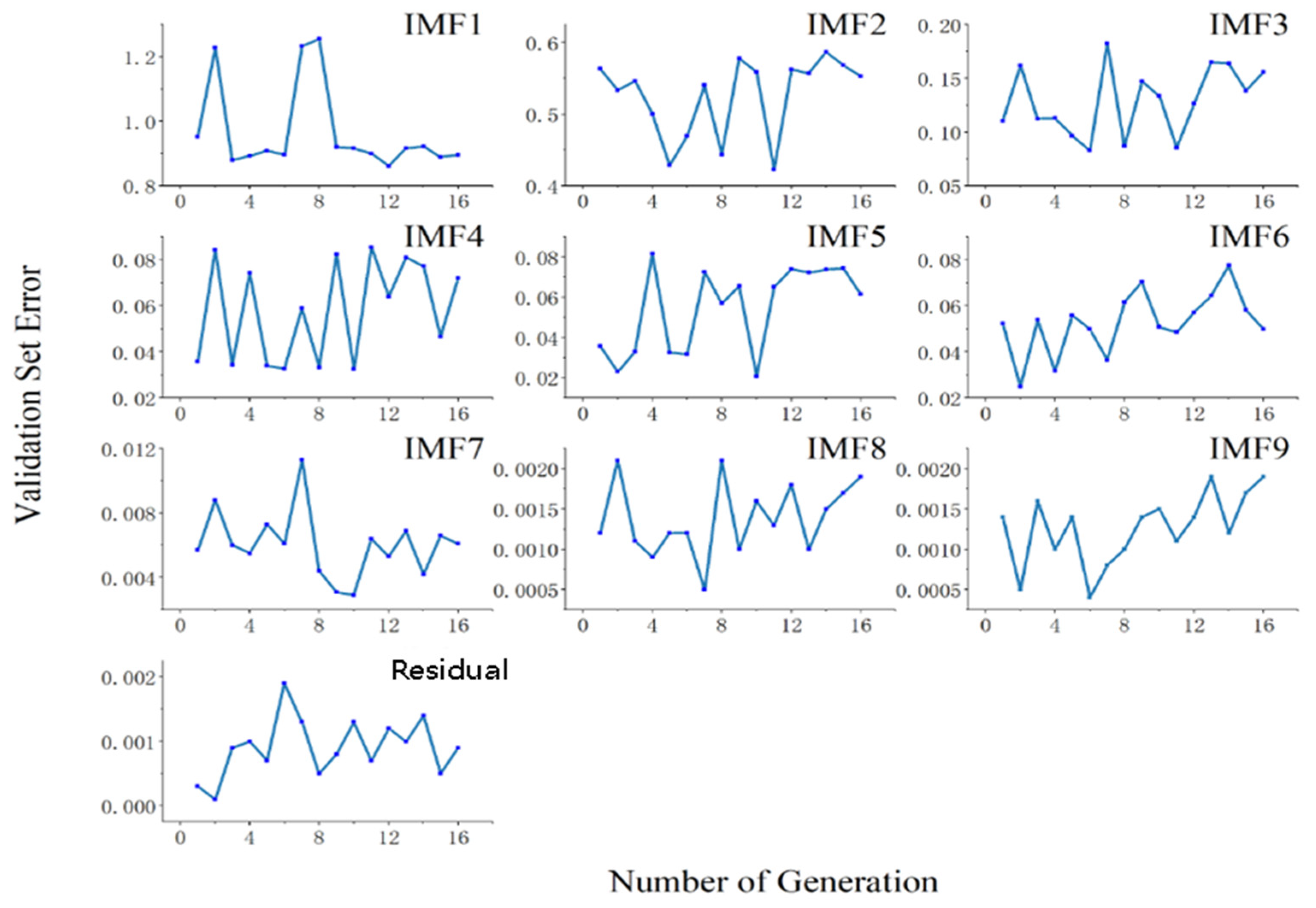
- Parameter optimization for LSTM. A GA optimizes the parameters (i.e., epochs, hidden neurons, and window size) of the corresponding LSTM network according to each IMF. The GA generates chromosomes based on the optimized parameters. According to the fitness function and termination conditions (maximum number of iterations), the final output chromosome is the optimal parameter for each LSTM NN. The equation for the fitness function is as follows:where represents the size of the validation set, and are the true value and corresponding predicted value of the propagation loss in the verification set, respectively.
- C.
- Propagation loss subsequence prediction. The optimized LSTM NN learns the changing laws of each subsequence through three gates: input, forget, and output gates. The gate is a fully connected layer in which the input is a subsequence vector, and the output is a real vector between 0 and 1. The equation iswhere x is the input subsequence vector, W is the weight vector, b is the bias term, δ is the activation function, and gate(x) is the corresponding output. The final subsequence prediction value is provided by the output gate.
- D.
- Propagation-loss reconstruction. The prediction results of each IMF and residual term are reconstructed according to Equation (5), and the final prediction results of the EM wave propagation loss in the oceanic duct are obtained:
2.2. Propagation-Loss Preprocessing
- (1)
- The ensemble number () (that is, the total number of white noises added to the original propagation loss sequence) and the amplitude of the added white noise sequence are initialized. Additionally, .
- (2)
- A new sequence is created by adding the white noise signal to the original EM propagation-loss sequence , and the specific equation is as follows:
- (3)
- The empirical mode decomposition (EMD) algorithm is applied to , which is decomposed into a set of IMFs () and a residual term follows:where is the IMF obtained after the is decomposed, is the corresponding residual term, and is the total number of subsequences obtained after EMD decomposition.
- (4)
- Steps (2) and (3) are repeated until reaches the maximum. After each new sequence is decomposed, the set of IMFs is:
- (5)
- Perform the set average operation on the IMFs set obtained in step (4), and the IMF components that can represent the different frequency domain characteristics of the original propagation loss sequence after data preprocessing are obtained:
2.3. Principle of Propagation-Loss Prediction
- 1.
- The first step is activating the forget gate (), and determines which information of the propagation-loss characteristics will be discarded from :
- 2.
- The second step is the activation of the input gate (), which determines which characteristic information of the propagation loss will be accumulated in the cell state; the function of the input gate is realized in two steps:
- 3.
- The cell state at current distance () is then updated, and the cell state at historical distance () is introduced to update :where is the candidate vector created by .
- 4.
- Finally, the output gate () is activated, and the predicted output value of propagation loss subsequence at current distance () primarily depends on two parts. One is that the output gate determines which parts of the output unit state are the output, and the other is to push the unit state value between −1 and 1 through the activation function (); subsequently, the two parts are multiplied as follows:
3. Experimental Results
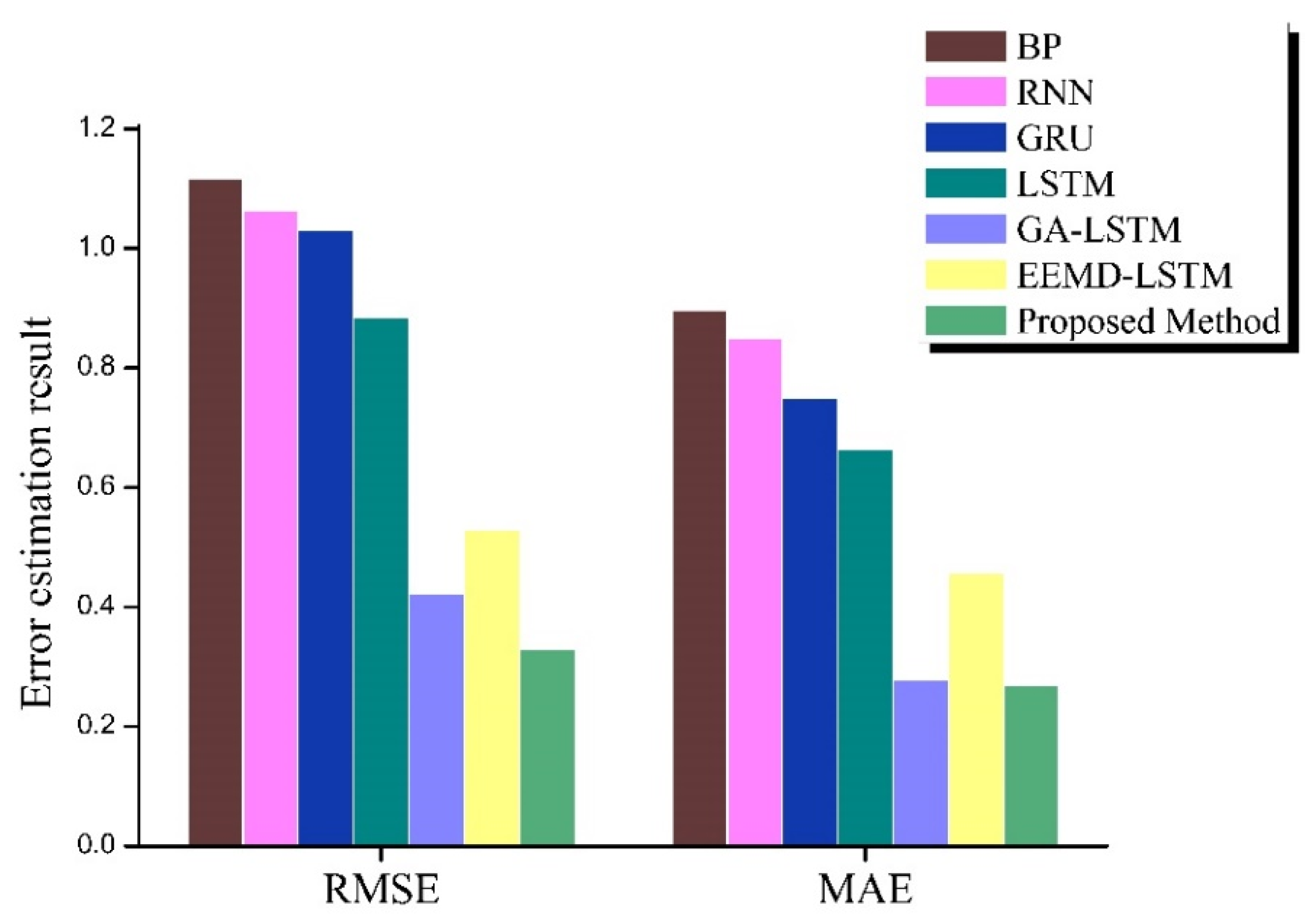
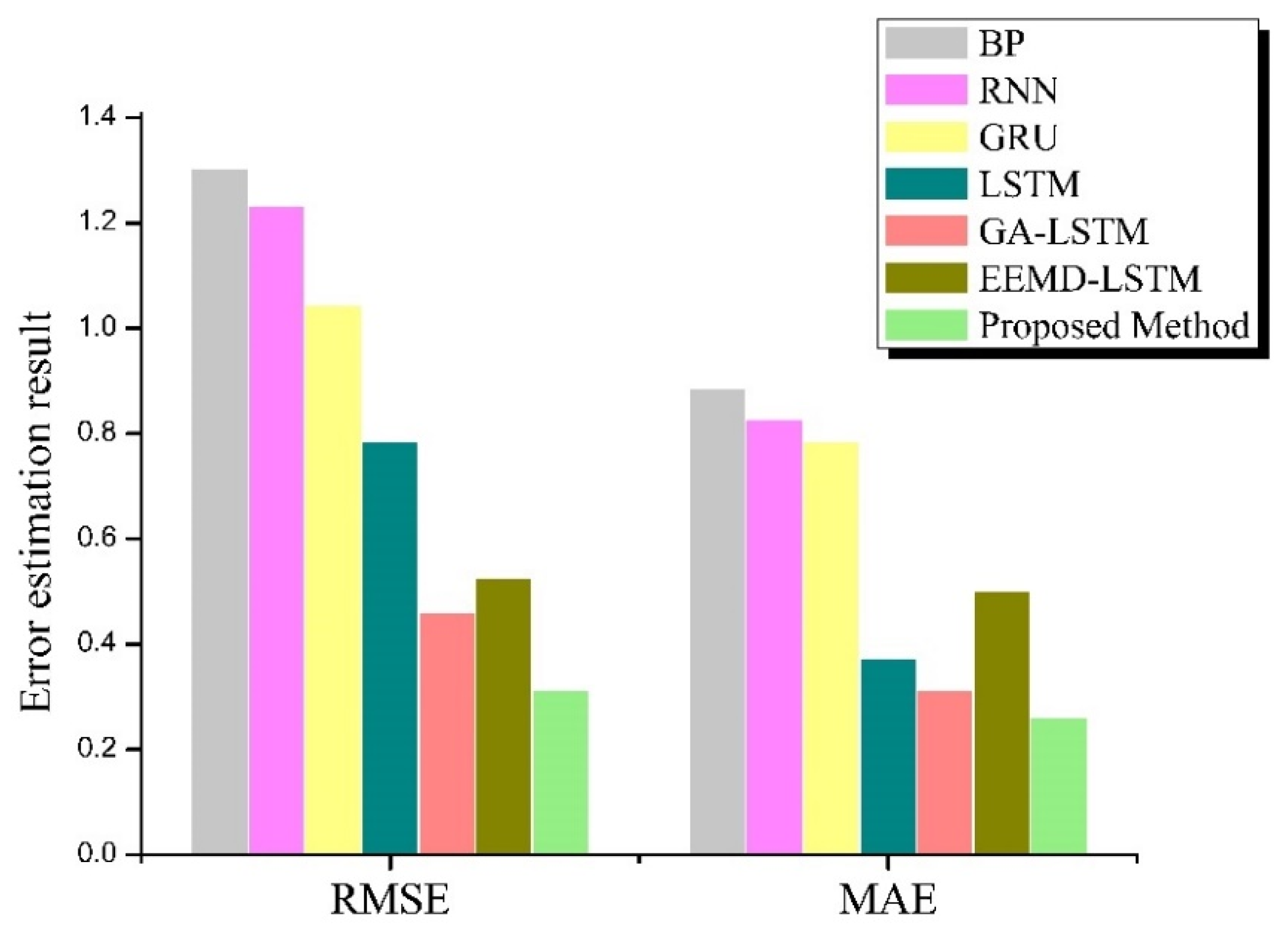
3.1. Evaluation Criteria for Prediction Capacity
- (1)
- The RMSE [44] represented the deviation of the square root between the predicted propagation loss value () the actual propagation loss value () in the total data size ratio. The specific equation is
- (2)
- The MAE [44] was the average of the absolute error between and , and represents the size of the propagation loss test set. The MAE was a more general form of the average error as shown in Equation (18).
- (3)
- To analyze the prediction ability improvement of the proposed method, the improvement percentage of the evaluation index was proposed; and represented the improvements in RMSE and MAE, respectively. These indicators are defined as follows:
3.2. Experimental Data Set
3.3. Comparison Method
- 1.
- BP method
- 2.
- RNN method
- 3.
- GRU method
- 4.
- Hybrid neural network method
3.4. Optimization of the LSTM Prediction Layer
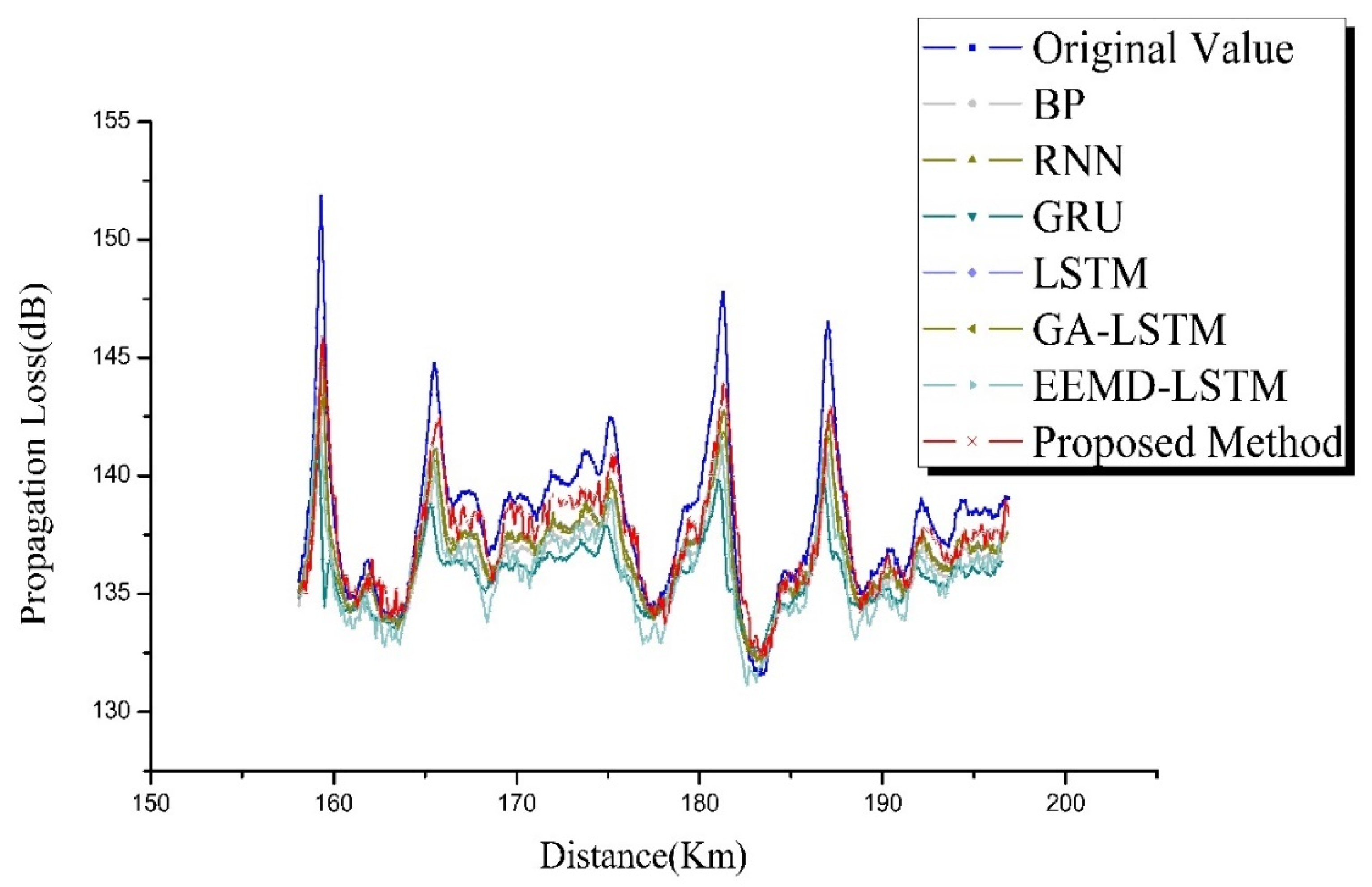
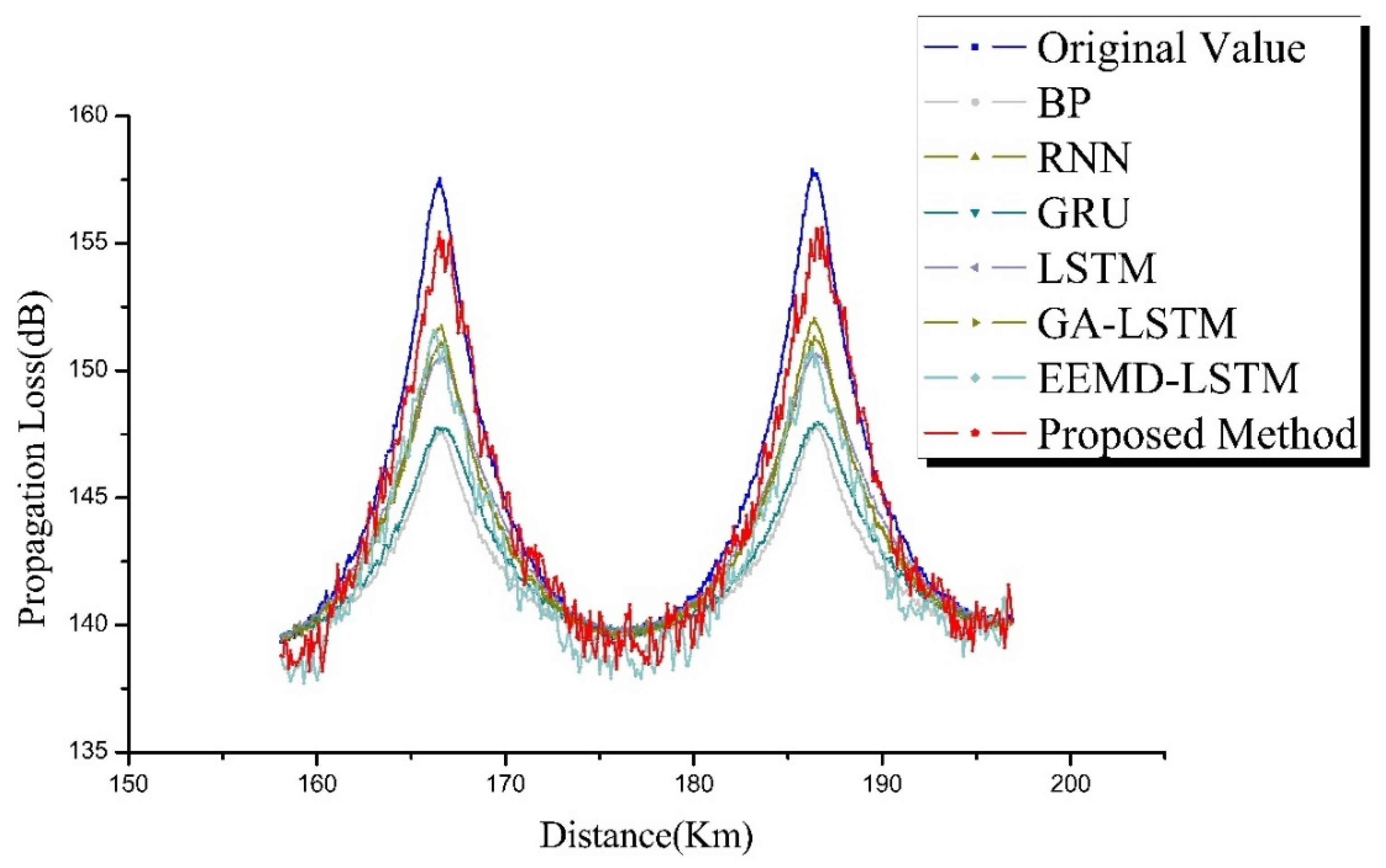
3.5. Propagation Loss Prediction Results
4. Results Analysis and Discussion
4.1. Simulation Data
- (a)
- The proposed method exhibited an optimal prediction ability for propagation loss for an oceanic tropospheric duct environment.
- (b)
- The LSTM method had a higher propagation-loss prediction accuracy than other single NN-based prediction methods.
- (c)
- The EEMD, as a data preprocessing method, effectively increased the prediction accuracy of propagation loss.
- (d)
- GA effectively increased the prediction accuracy of the propagation-loss prediction method.
- (e)
- The propagation-loss prediction accuracy based on a hybrid LSTM method was higher than that of a single LSTM NN.
- (f)
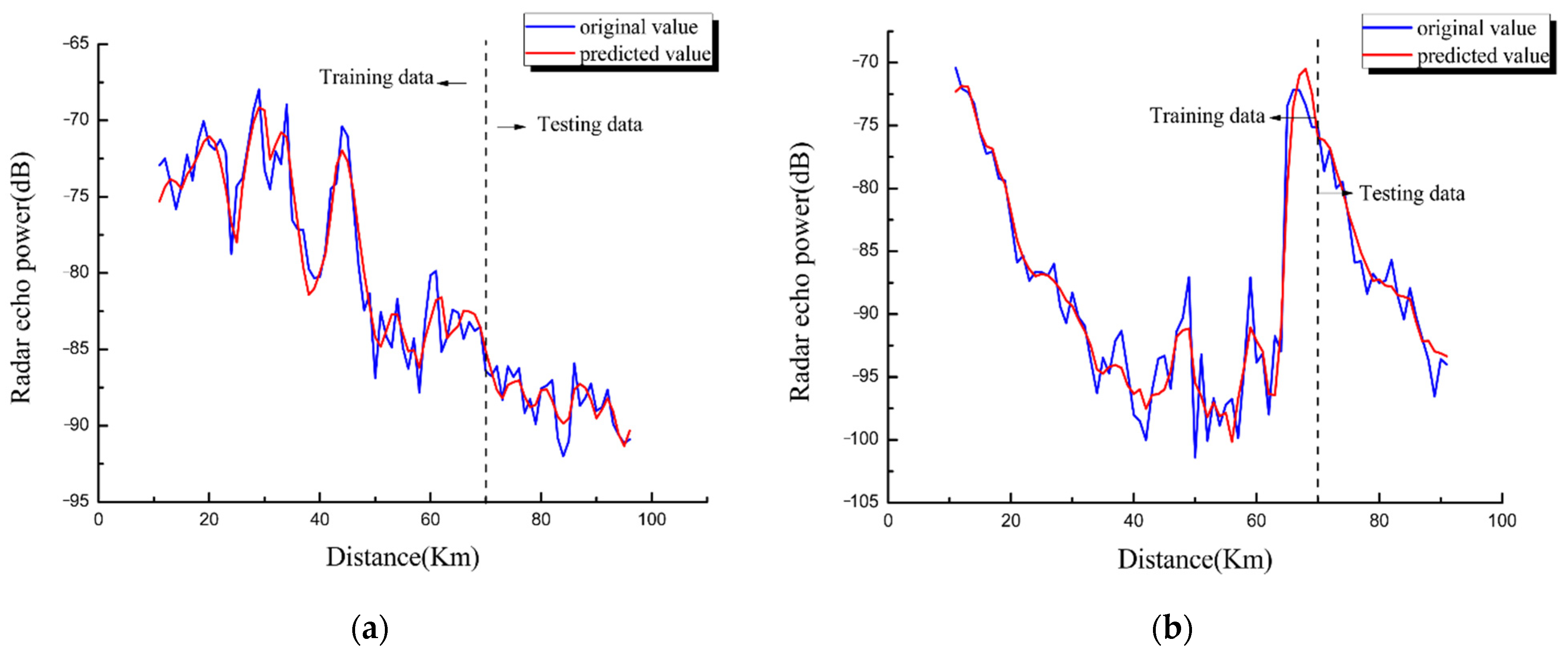
4.2. Field Data Testing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbols | Definitions and Description |
| The original EM wave propagation-loss sequence | |
| The propagation loss in free space | |
| The propagation loss of the medium | |
| The propagation-loss subsequence obtained by EEMD decomposition of propagation loss, | |
| The intrinsic mode function (the first N − 1 of the propagation loss subsequences ) | |
| The residual term (the last item of the propagation loss subsequences ) | |
| The true value of the propagation loss | |
| The corresponding predicted value of the propagation loss | |
| The size of the propagation loss test set. | |
| The ensemble number | |
| The added white noise sequence, | |
| The new sequence (created by adding the to ,) | |
| the IMF obtained by EMD decomposition of the | |
| The corresponding residual term (obtained by EMD decomposition of the ) | |
| The current distance between the EM wave transmitting end and the propagation loss receiving end | |
| The historical distance between the EM wave transmitting end and the propagation loss receiving end | |
| The input of the LSTM network | |
| The predicted value of at current distance | |
| The predicted value of at historical distance | |
| The cell state at current distance | |
| the cell state at historical distance | |
| The forget gate | |
| The input gate | |
| The output gate | |
| The bias term corresponding to the gate unit | |
| The weight vector corresponding to the gate unit | |
| the activation function | |
| The candidate vector created by | |
| The size of the validation set | |
| The radar receiving antenna and the sea surface scattering unit | |
| The atmospheric modified refractive index profile | |
| The radar echoes power | |
| The transmit power of the radar | |
| The backscatter coefficient | |
| The radar antenna gain | |
| The EM wavelength. |
References
- Zhang, J.P.; Wu, Z.-S.; Zhao, Z.-W.; Zhang, Y.-S.; Wang, B. Propagation modeling of ocean-scattered low-elevation GPS signals for maritime tropospheric duct inversion. Chin. Phys. B 2012, 21, 109202. [Google Scholar] [CrossRef]
- Yang, S.; Yang, K.D.; Yang, Y.X.; Ma, Y.L. Experimental verification of effect of horizontal inhomogeneity of evaporation duct on electromagnetic wave propagation. Chin. Phys. B 2015, 24, 044102. [Google Scholar]
- Shi, Y.; Yang, K.-D.; Yang, Y.-X.; Ma, Y.-L. Influence of obstacle on electromagnetic wave propagation in evaporation duct with experiment verification. Chin. Phys. B 2015, 24, 054101. [Google Scholar] [CrossRef]
- Protopapadakis, E.; Voulodimos, A.; Doulamis, A.; Doulamis, N.; Dres, D.; Bimpas, M. Stacked autoencoders for outlier detection in over-the-horizon radar signals. Comput. Intell. Neurosci. 2017, 2017. [Google Scholar] [CrossRef]
- Wagner, M.; Gerstoft, P.; Rogers, T. Estimating refractivity from propagation loss in turbulent media. J. Radio Sci. 2016, 51, 1876–1894. [Google Scholar] [CrossRef]
- Ullah, A.; Rehman, S.U.; Mufti, N. Investigations into the occurrence of elevated ducts in lower atmosphere near Arabian Sea. In Proceedings of the 2015 International Conference on Space Science and Communication (IconSpace), Langkawi, Malaysia, 10–12 August 2015; pp. 128–131. [Google Scholar]
- Rehman, S.U.; Mufti, N. Investigations into the occurrence of evaporation ducts near Karachi. In Proceedings of the 2017 International Conference on Communication Technologies (ComTech), Rawalpindi, Pakistan, 19–21 April 2017; pp. 34–38. [Google Scholar]
- Teti, J. Parabolic equation methods for electromagnetic wave propagation [Book Review]. IEEE Antennas Propag. Mag. 2001, 43, 96–97. [Google Scholar] [CrossRef]
- Durand, J.C.; Granier, P. Radar coverage assessment in nonstandard and ducting conditions: A geometrical optics approach. In IEE Proceedings F (Radar and Signal Processing); IET Digital Library: Wales and Scotland, UK, 1990; pp. 95–101. [Google Scholar]
- Budden, K.G. The Wave-Guide Mode Theory of Wave Propagation; Logos Press: London, UK, 1961. [Google Scholar]
- Levy, M. Parabolic Equation Methods for Electromagnetic Wave Propagation; No. 45. IET; Institution of Engineering and Technology (IET): London, UK, 2000. [Google Scholar]
- Iqbal, A.; Jeoti, V. Numerical evaluation of radiowave propagation in evaporation ducts using FEM. In Proceedings of the 2011 National Postgraduate Conference, Perak, Malaysia, 19–20 September 2011; pp. 1–6. [Google Scholar]
- Zhao, X.-F.; Huang, S.-X.; Kang, L.-C. New method to solve electromagnetic parabolic equation. Appl. Math. Mech. 2013, 34, 1373–1382. [Google Scholar] [CrossRef]
- Bitner-Gregersen, E.M.; Bhattacharya, S.K.; Chatjigeorgiou, I.K.; Eames, I.; Ellermann, K.; Ewans, K.; Hermanski, G.; Johnson, M.C.; Ma, N.; Maisondieu, C.; et al. Recent developments of ocean environmental description with focus on uncertainties. Ocean Eng. 2014, 86, 26–46. [Google Scholar] [CrossRef]
- Zheng, Y.Q.; Li, J.S.; Gong, L.X.; Zeng, X.M.; Gao, J.L.; Gao, Y. Characteristics of spring and summer weather over the Gulf of Aden. J. PLA Univ. Sci. Technol. 2012, 6, 688–693. [Google Scholar]
- Liu, Y.; Zhou, X.L.; Jin, H.Q.; Wang, W.Y. Research on Influence of Rough Sea Surface on Radio Wave Propagation. J. Radio Eng. 2012, 3, 38–40. [Google Scholar]
- Liu, Y.; Zhou, X.-L.; Pei, R.-J. Study on Rough Sea-surface Radio Wave Propagation based on PE Model. Commun. Technol. 2012, 45, 4–6. [Google Scholar]
- Karimian, A.; Yardim, C.; Hodgkiss, W.S.; Gerstoft, P.; Barrios, A.E. Estimation of radio refractivity using a multiple angle clutter model. Radio Sci. 2012, 47, 1–9. [Google Scholar] [CrossRef]
- Yang, S.; Yang, Y.; Yang, K. Electromagnetic Wave Propagation Simulation in Horizontally Inhomogeneous Evaporation Duct. In Theory. Methodology, Tools and Applications for Modeling and Simulation of Complex Systems; Springer: Singapore, 2016; pp. 210–216. [Google Scholar]
- Burk, S.D.; Haack, T.; Rogers, L.T.; Wagner, L.J. Island Wake Dynamics and Wake Influence on the Evaporation Duct and Radar Propagation. J. Appl. Meteorol. 2003, 42, 349–367. [Google Scholar] [CrossRef]
- Sheng, Z.; Wang, J.; Zhou, S.; Zhou, B. Parameter estimation for chaotic systems using a hybrid adaptive cuckoo search with simulated annealing algorithm. Chaos Interdiscip. J. Nonlinear Sci. 2014, 24, 013133. [Google Scholar] [CrossRef]
- Zhao, X.; Huang, S. Atmospheric duct estimation using radar sea clutter returns by the adjoint method with regularization technique. J. Atmos. Ocean. Technol. 2014, 31, 1250–1262. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Z.; Wang, B.; Wang, H.; Zhu, Q. Modeling low elevation GPS signal propagation in maritime atmospheric ducts. J. Atmos. Sol.-Terr. Phys. 2012, 80, 12–20. [Google Scholar] [CrossRef]
- Hetherington, P.A.; Groves, A.R. System for Suppressing Rain Noise. U.S. Patent No. 7949522, 24 May 2011. [Google Scholar]
- Rogers, L.T.; Hattan, C.P.; Stapleton, J.K. Estimating evaporation duct heights from radar sea echo. Radio Sci. 2000, 35, 955–966. [Google Scholar] [CrossRef]
- De Gooijer, J.G.; Hyndman, R.J. 25 years of time series forecasting. Int. J. Forecast. 2006, 22, 443–473. [Google Scholar] [CrossRef]
- Zhang, G.; Patuwo, B.E.; Hu, M.Y. Forecasting with artificial neural networks: The state of the art. Int. J. Forecast. 1998, 14, 35–62. [Google Scholar] [CrossRef]
- Mom, J.M.; Mgbe, C.O.; Igwue, G.A. Igwue. Application of artificial neural network for path loss prediction in urban macrocellular environment. Am. J. Eng. Res. 2014, 3, 270–275. [Google Scholar]
- Ostlin, E.; Zepernick, H.-J.; Suzuki, H. Macrocell Path-Loss Prediction Using Artificial Neural Networks. IEEE Trans. Veh. Technol. 2010, 59, 2735–2747. [Google Scholar] [CrossRef]
- Cheerla, S.; Ratnam, D.V.; Borra, H.S. Neural network-based path loss model for cellular mobile networks at 800 and 1800 MHz bands. AEU Int. J. Electron. Commun. 2018, 94, 179–186. [Google Scholar] [CrossRef]
- Popescu, I.; Nikitopoulos, D.; Constantinou, P.; Nafornita, I. ANN prediction models for outdoor environment. In Proceedings of the 2006 IEEE 17th International Symposium on Personal, Indoor and Mobile Radio Communications, Helsinki, Finland, 11–14 September 2006; pp. 1–5. [Google Scholar]
- Hüsken, M.; Stagge, P. Recurrent neural networks for time series classification. Neurocomputing 2003, 50, 223–235. [Google Scholar] [CrossRef]
- Bayer, J.S. Learning Sequence Representations. Ph.D. Thesis, Technische Universität München, München, Germany, 2015. [Google Scholar]
- Pascanu, R.; Mikolov, T.; Bengio, Y. On the difficulty of training recurrent neural networks. In Proceedings of the International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; pp. 1310–1318. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Li, Q.; Yin, Z.Y.; Zhu, X.Q.; Zhang, Y.S. Measurement and Modeling of Radar Clutter from Land and Sea; National Defense Industry Press: Beijing, China, 2017; p. 16. [Google Scholar]
- Ma, L.; Wu, Z.; Zhang, J.; Jeon, G.; Tan, M. Sea Clutter Amplitude Prediction Using a Long Short-Term Memory Neural Network. Remote Sens. 2019, 11, 2826. [Google Scholar] [CrossRef]
- Poli, P.; Hersbach, H.; Dee, D.P.; Berrisford, P.; Simmons, A.J.; Vitart, F.; Laloyaux, P.; Tan, D.G.H.; Peubey, C.; Thépaut, J.-N.; et al. ERA-20C: An Atmospheric Reanalysis of the Twentieth Century. J. Clim. 2016, 29, 4083–4097. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Liu, D.; Niu, D.; Wang, H.; Fan, L. Short-term wind speed forecasting using wavelet transform and support vector machines optimized by genetic algorithm. Renew. Energy 2014, 62, 592–597. [Google Scholar] [CrossRef]
- Liu, H.; Mi, X.; Li, Y. Smart deep learning-based wind speed prediction model using wavelet packet decomposition, convolutional neural network and convolutional long short-term memory network. Energy Convers. Manag. 2018, 166, 120–131. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Q.; Ruan, F.; Liang, Z.; Qiu, H. Springback prediction for sheet metal forming based on GA-ANN technology. J. Mater. Process. Technol. 2007, 187–188, 227–231. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, N.; Wu, L.; Wang, Y. Wind speed forecasting based on the hybrid ensemble empirical mode decomposition and GA-BP neural network method. Renew. Energy 2016, 94, 629–636. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef]
- Sadeghi, B. A BP-neural network predictor model for plastic injection molding process. J. Mater. Process. Technol. 2000, 103, 411–416. [Google Scholar] [CrossRef]
- Chen, J.; Jing, H.; Chang, Y.; Liu, Q. Gated recurrent unit based recurrent neural network for remaining useful life prediction of nonlinear deterioration process. Reliab. Eng. Syst. Saf. 2019, 185, 372–382. [Google Scholar] [CrossRef]
- Greff, K.; Srivastava, R.K.; Koutnik, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2222–2232. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Propagation-Loss Subsequence Evaporation Duct | Epochs | Hidden Neurons | Windows Size | Propagation-Loss Subsequence Surface Duct | Epochs | Hidden Neurons | Windows Size |
|---|---|---|---|---|---|---|---|
| IMF1 | 815 | 5 | 1 | IMF1 | 987 | 1 | 1 |
| IMF2 | 331 | 1 | 3 | IMF2 | 987 | 1 | 5 |
| IMF3 | 663 | 2 | 1 | IMF3 | 663 | 1 | 5 |
| IMF4 | 1554 | 1 | 5 | IMF4 | 392 | 1 | 5 |
| IMF5 | 987 | 1 | 5 | IMF5 | 987 | 1 | 5 |
| IMF6 | 392 | 5 | 1 | IMF6 | 663 | 2 | 1 |
| IMF7 | 751 | 2 | 1 | IMF7 | 392 | 5 | 1 |
| IMF8 | 1154 | 4 | 1 | IMF8 | 1554 | 2 | 1 |
| Residual | 751 | 4 | 1 | IMF9 | 815 | 5 | 3 |
| Residual | 392 | 5 | 1 |
| Prediction Approaches | RMSE | MAE |
|---|---|---|
| BP | 1.1163 | 0.8969 |
| RNN | 1.0636 | 0.8492 |
| GRU | 1.0315 | 0.7486 |
| LSTM | 0.8836 | 0.6646 |
| GA–LSTM | 0.4220 | 0.2790 |
| EEMD–LSTM | 0.5288 | 0.4577 |
| Proposed method | 0.3304 | 0.2683 |
| Prediction Approaches | RMSE | MAE |
|---|---|---|
| BP | 1.3030 | 0.8849 |
| RNN | 1.2333 | 0.8274 |
| GRU | 1.0455 | 0.7865 |
| LSTM | 0.7842 | 0.3734 |
| GA–LSTM | 0.4594 | 0.3127 |
| EEMD–LSTM | 0.5256 | 0.5014 |
| Proposed method | 0.3140 | 0.2613 |
| Prediction Approaches | ||
|---|---|---|
| BP | 57.41% | 70.47% |
| RNN | 74.54% | 68.42% |
| GRU | 69.97% | 66.78% |
| LSTM | 59.96% | 30.02% |
| GA–LSTM | 31.65% | 16.44% |
| EEMD–LSTM | 40.26% | 47.89% |
| Prediction Approaches | ||
|---|---|---|
| BP | 70.40% | 70.09% |
| RNN | 68.94% | 68.41% |
| GRU | 67.97% | 64.16% |
| LSTM | 62.61% | 59.63% |
| GA–LSTM | 21.71% | 3.84% |
| EEMD–LSTM | 37.52% | 41.38% |
| Prediction Approaches | ||
|---|---|---|
| BP | 20.85% | 25.90% |
| RNN | 16.92% | 21.74% |
| GRU | 14.34% | 11.22% |
| Prediction Approaches | ||
|---|---|---|
| BP | 39.82% | 57.80% |
| RNN | 36.41% | 54.87% |
| GRU | 24.99% | 52.52% |
| Prediction Approaches (Evaporation duct) | RMSE | MAE |
| LSTM | 0.8836 | 0.6646 |
| EEMD–LSTM | 0.5288 | 0.4577 |
| GA–LSTM | 0.4220 | 0.2790 |
| Proposed method | 0.3304 | 0.2683 |
| Prediction Approaches (Surface duct) | RMSE | MAE |
| LSTM | 0.7842 | 0.3734 |
| EEMD–LSTM | 0.5255 | 0.5014 |
| GA–LSTM | 0.4594 | 0.3127 |
| Proposed method | 0.3140 | 0.2613 |
| Propagation-Loss Subsequences | ||
|---|---|---|
| IMF1 | 5.25% | 5.56% |
| IMF2 | 7.50% | 7.42% |
| IMF3 | 7.70% | 3.94% |
| IMF4 | 12.45% | 9.49% |
| IMF5 | 9.04% | 1.69% |
| IMF6 | 1.70% | 0.93% |
| IMF7 | 36.79% | 35.32% |
| IMF8 | 73.55% | 75.37% |
| Residual | 66.27% | 70.47% |
| Propagation-Loss Subsequences | ||
|---|---|---|
| IMF1 | 7.68% | 8.92% |
| IMF2 | 11.80% | 12.37% |
| IMF3 | 5.57% | 4.71% |
| IMF4 | 3.92% | 5.68% |
| IMF5 | 23.55% | 22.56% |
| IMF6 | 69.82% | 67.75% |
| IMF7 | 34.27% | 35.25% |
| IMF8 | 19.54% | 18.60% |
| IMF9 | 71.00% | 72.21% |
| Residual | 40.86% | 46.78% |
| Prediction Approaches Evaporation Duct | RMSE | MAE |
| LSTM | 0.8836 | 0.6646 |
| GA–LSTM | 0.4220 | 0.2790 |
| EEMD–LSTM | 0.5288 | 0.4577 |
| Proposed method | 0.3304 | 0.2683 |
| Prediction Approaches Surface Duct | RMSE | MAE |
| LSTM | 0.7842 | 0.3734 |
| GA–LSTM | 0.4594 | 0.3127 |
| EEMD–LSTM | 0.5255 | 0.5014 |
| Proposed method | 0.3140 | 0.2613 |
| Radar Parameter | Value |
|---|---|
| Frequency (GHz) | 3.0 |
| Antenna elevation(degree) | 0.57 |
| Antenna height (m) | 169 |
| Transmitting power (kW) | 700 |
| Antenna gain (dB) | 45 |
| Antenna horizontal beam width (degree) | 1.0 |
| Antenna vertical beam width (degree) | 1.0 |
| Pulse width () | 1.0 |
| Prediction Approaches 90° Azimuth | RMSE | MAE |
| BP | 3.7338 | 3.3076 |
| RNN | 3.2216 | 2.8937 |
| GRU | 3.6098 | 3.2750 |
| LSTM | 1.8432 | 1.4385 |
| GA–LSTM | 1.8323 | 1.4264 |
| EEMD–LSTM | 1.4729 | 1.1208 |
| Proposed method | 1.0644 | 0.8700 |
| Prediction Approaches 120° Azimuth | RMSE | MAE |
| BP | 4.3998 | 2.4776 |
| RNN | 2.8040 | 2.1168 |
| GRU | 2.7277 | 2.0772 |
| LSTM | 2.2747 | 1.9604 |
| GA–LSTM | 2.0859 | 1.7750 |
| EEMD–LSTM | 1.6657 | 1.3358 |
| Proposed method | 1.4515 | 1.0816 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, M.; Wu, J.; Cui, S.; Guo, X.; Cao, Y.; Wei, H.; Wu, Z. Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts. Remote Sens. 2021, 13, 1173. https://doi.org/10.3390/rs13061173
Dang M, Wu J, Cui S, Guo X, Cao Y, Wei H, Wu Z. Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts. Remote Sensing. 2021; 13(6):1173. https://doi.org/10.3390/rs13061173
Chicago/Turabian StyleDang, Mingxia, Jiaji Wu, Shengcheng Cui, Xing Guo, Yunhua Cao, Heli Wei, and Zhensen Wu. 2021. "Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts" Remote Sensing 13, no. 6: 1173. https://doi.org/10.3390/rs13061173
APA StyleDang, M., Wu, J., Cui, S., Guo, X., Cao, Y., Wei, H., & Wu, Z. (2021). Multiscale Decomposition Prediction of Propagation Loss in Oceanic Tropospheric Ducts. Remote Sensing, 13(6), 1173. https://doi.org/10.3390/rs13061173