
An Oil Well Dataset Derived from Satellite-Based Remote Sensing

 ,
,  ,
,
Abstract

1. Introduction
1.1. Background
1.2. Related Work
1.2.1. Oil-Related Monitoring Using Remote Sensing Techniques
1.2.2. Smart Oilfield
1.2.3. Deep Learning in Remote Sensing
2. Oil Well Dataset
2.1. Images Collection and Pre-Processing
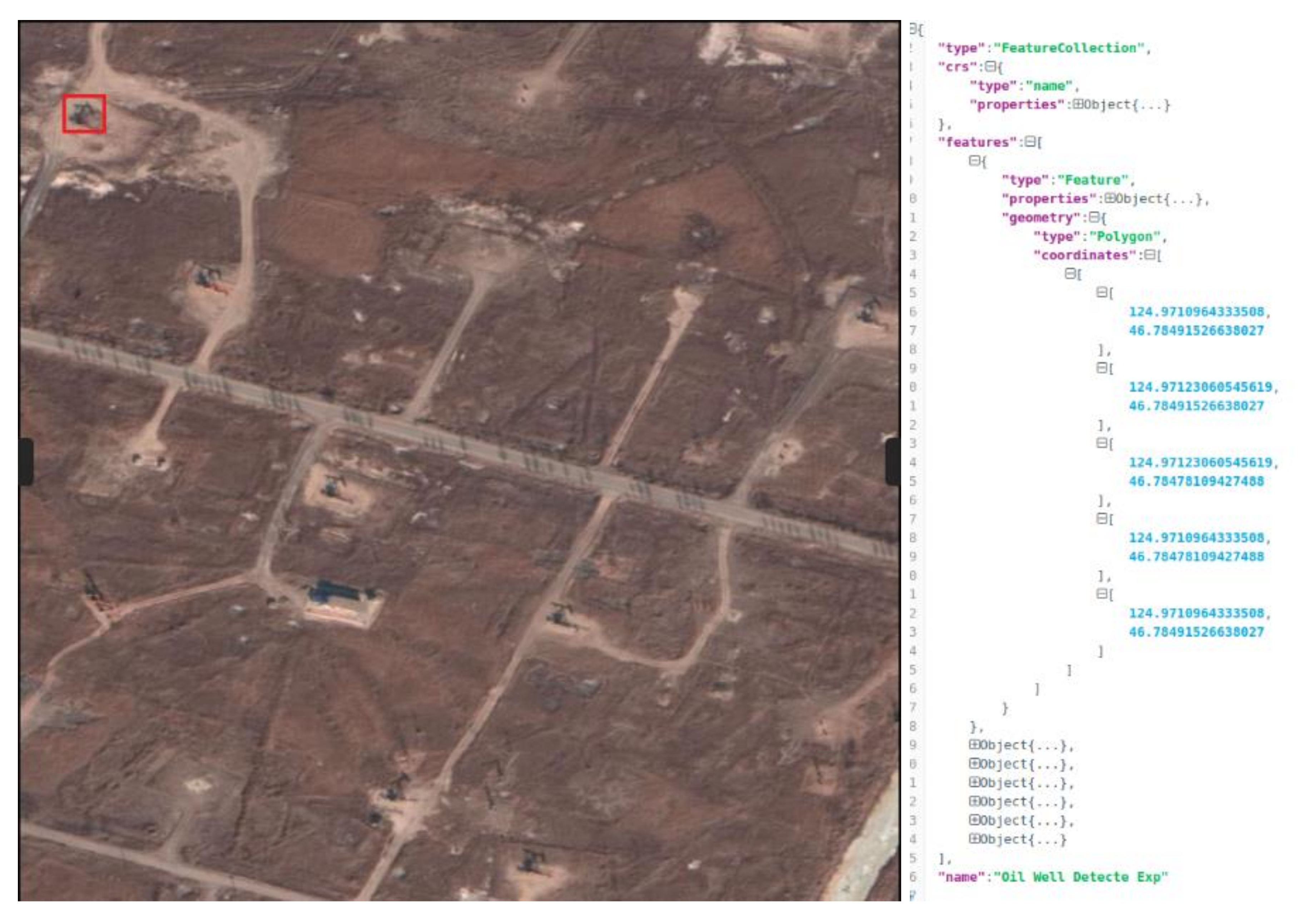
2.2. Images Annotation/Labeling
3. Methods
3.1. Two-Stage Method
3.1.1. Faster R-CNN
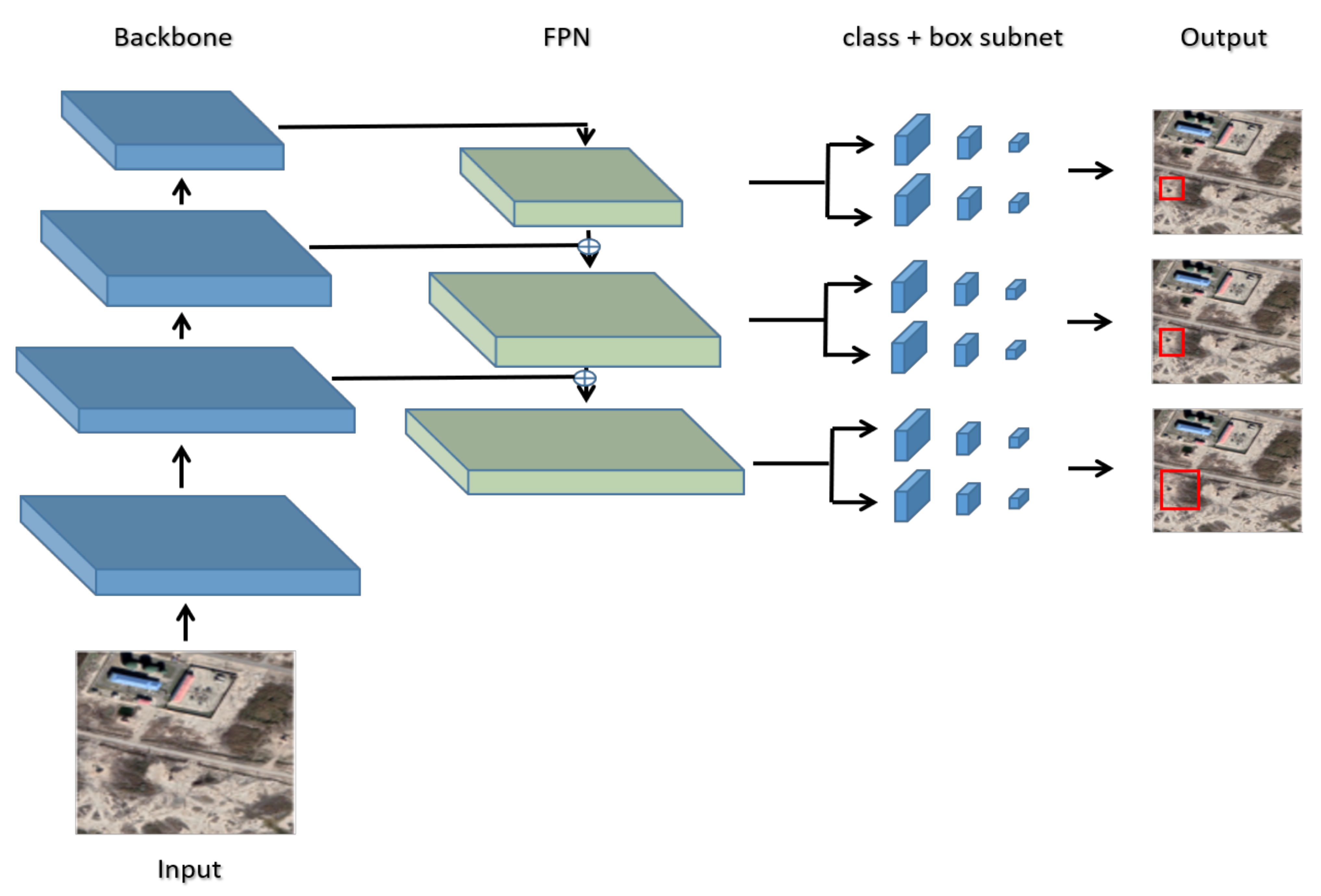
3.1.2. Backbone Network
3.2. One-Stage Method
3.2.1. YOLO
3.2.2. SSD
3.2.3. RetinaNet
4. Experimental Results
4.1. Training Details
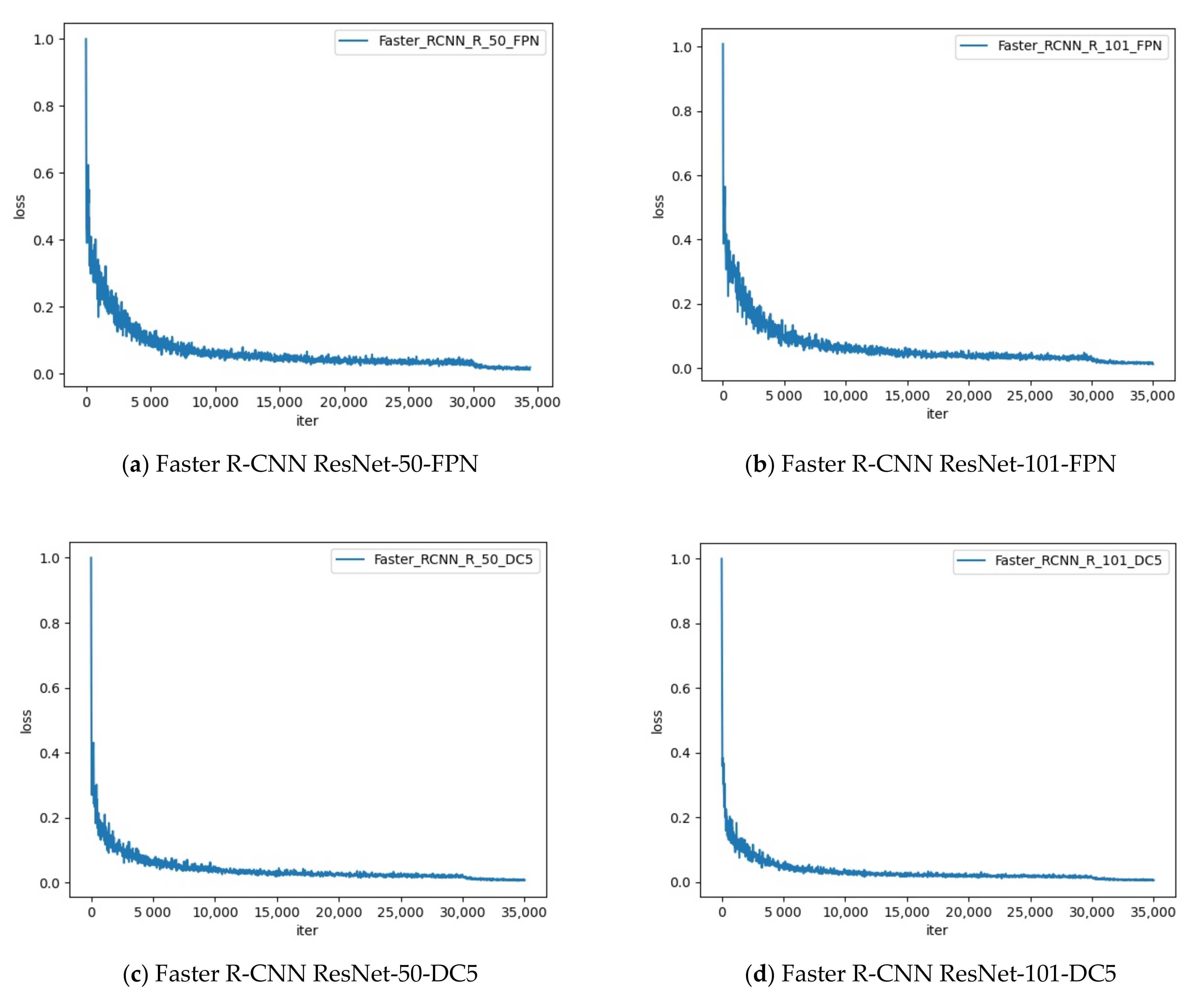
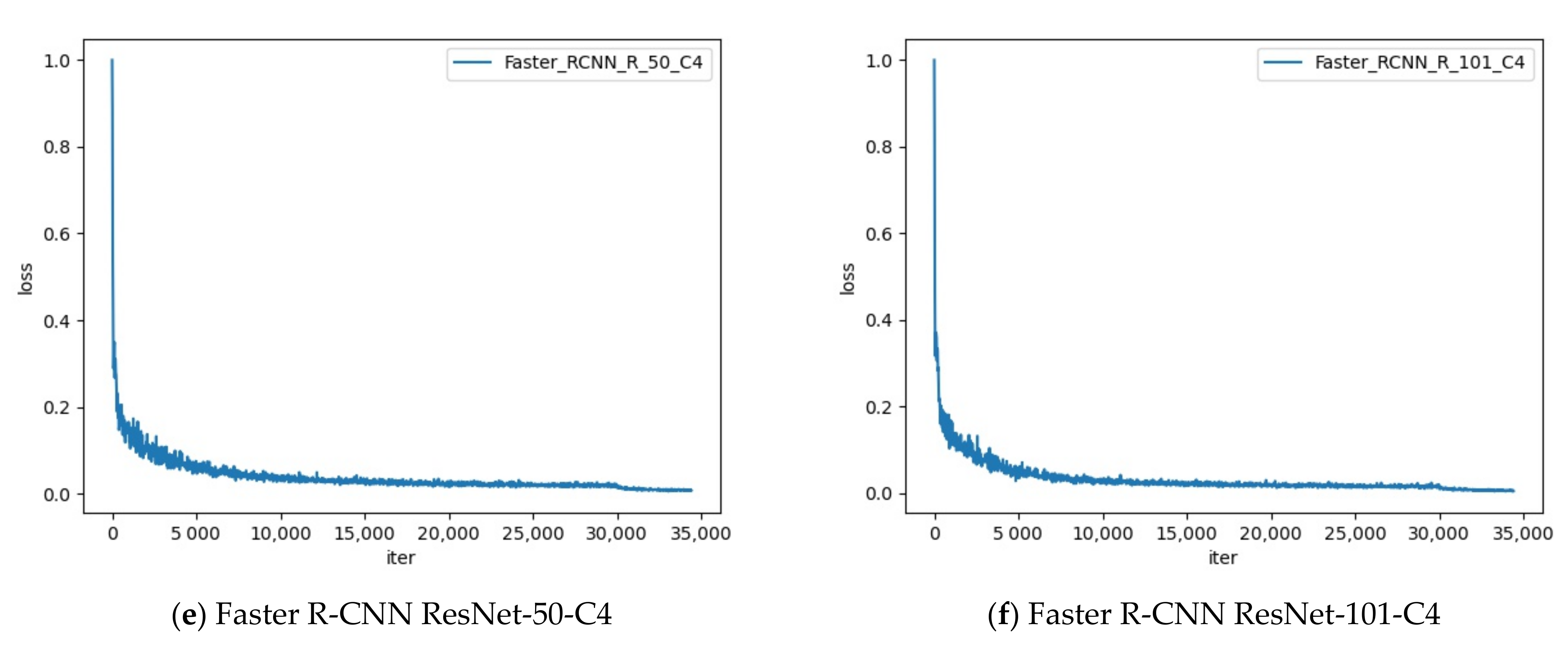
Training Loss
4.2. Evaluation Metrics
4.2.1. Intersection over Union (IoU)
4.2.2. Precision, Recall, and F1 Score
4.2.3. AP
4.2.4. McNemar’s Test
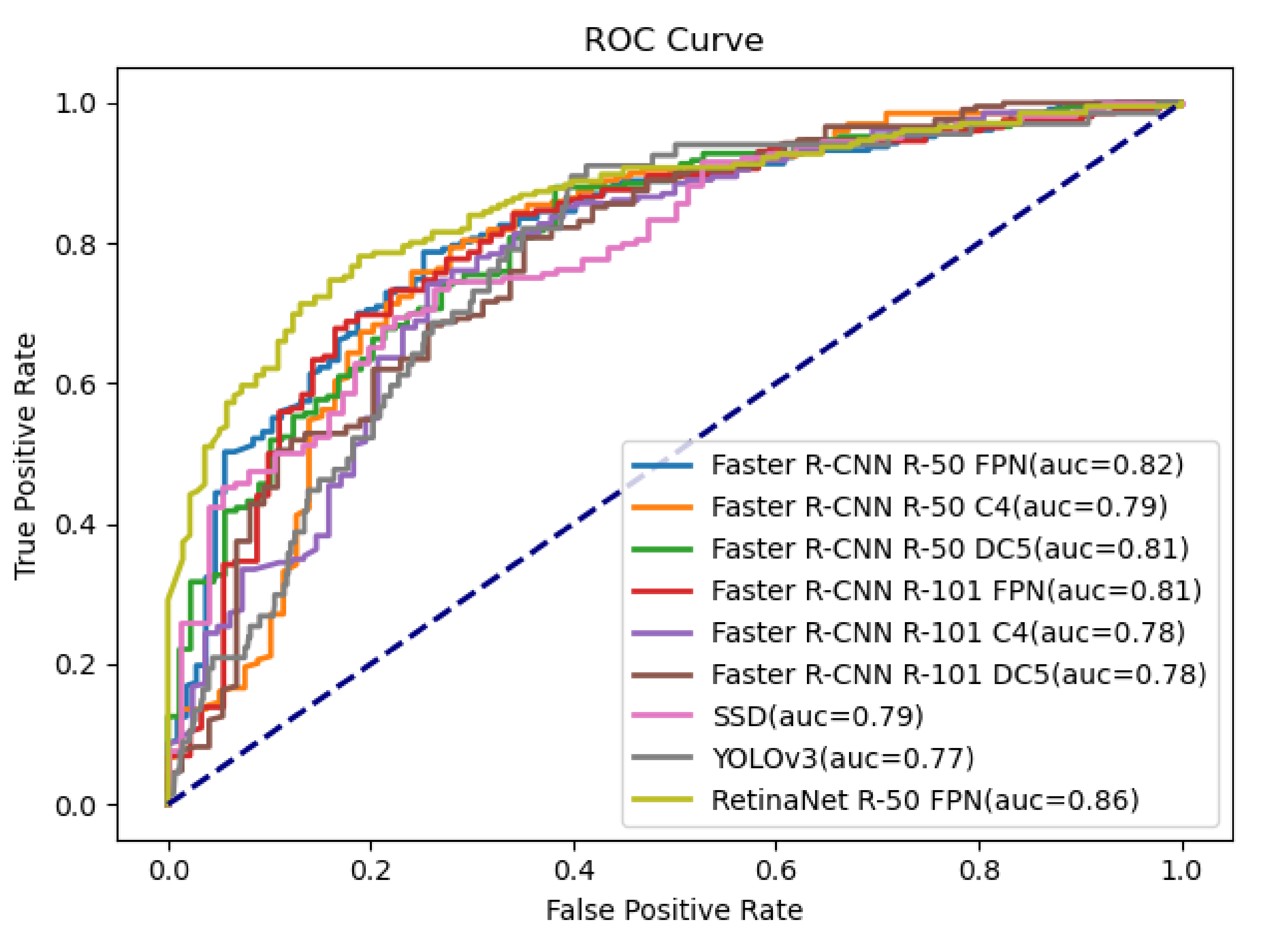
4.2.5. ROC Curve
4.3. Experimental Results for State-of-Art Algorithms
4.3.1. Comparisons of Oil Well Detection Accuracy of Different State-of-the-Art Models
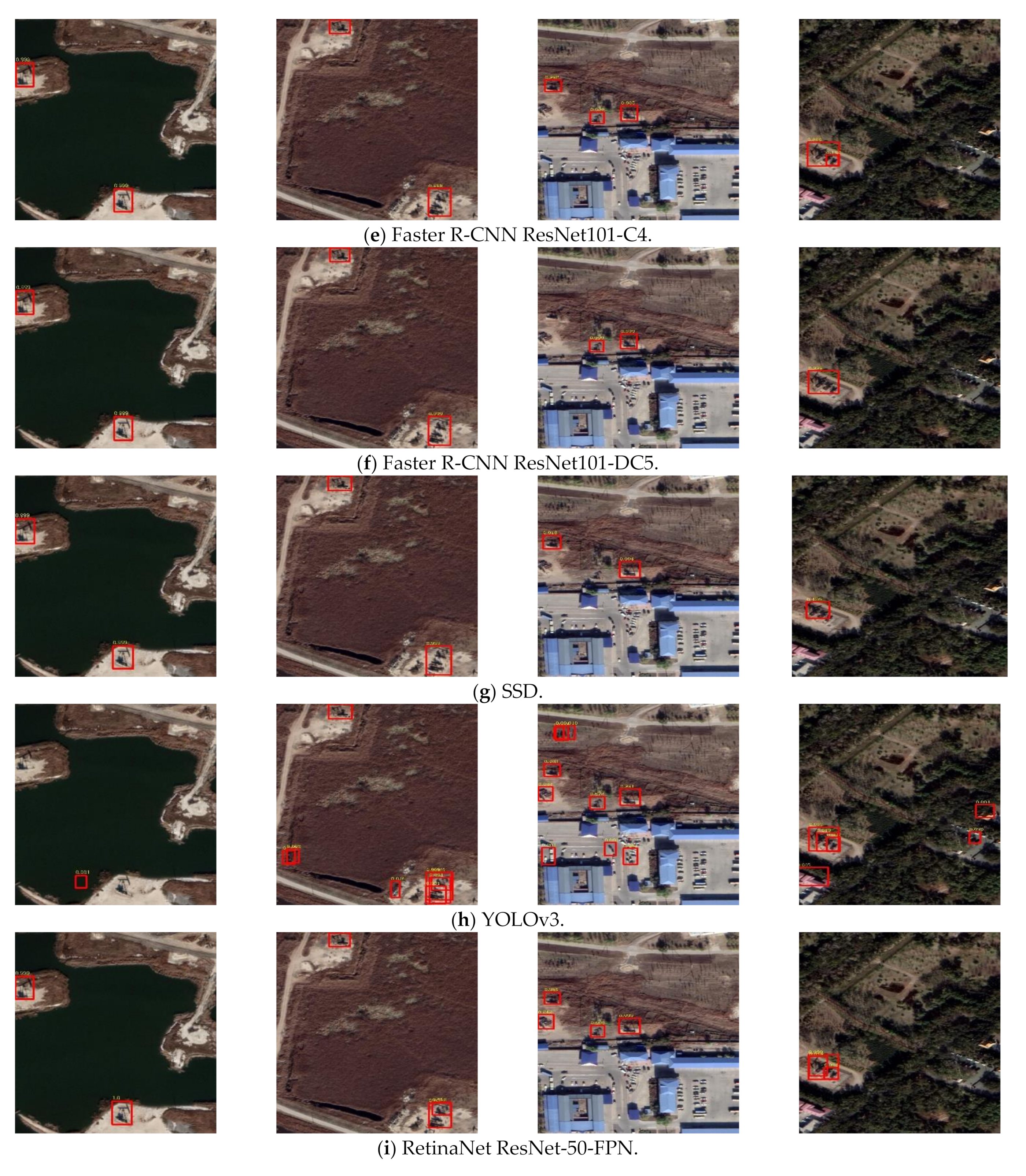
4.3.2. Comparisons of Oil Well Detection Accuracy in Different Background and Orientations
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- BP Energy Outlook. 2019. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporate/pdfs/energy-economics/energy-outlook/bp-energy-outlook-2019-region-insight-global-et.pdf (accessed on 15 December 2020).
- Xue, Y.; Li, Y.; Guang, J.; Zhang, X.; Guo, J. Small satellite remote sensing and applications—History, current and future. Int. J. Remote Sens. 2008, 29, 4339–4372. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef]
- Fan, J.; Zhang, F.; Zhao, D.; Wang, J. Oil Spill Monitoring Based on SAR Remote Sensing Imagery. Aquat. Procedia 2015, 3, 112–118. [Google Scholar] [CrossRef]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in Remote Sensing for Oil Spill Disaster Management: State-of-the-Art Sensors Technology for Oil Spill Surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Shih, W.-C.; Andrews, A.B. Infrared contrast of crude-oil-covered water surfaces. Opt. Lett. 2008, 33, 3019–3021. [Google Scholar] [CrossRef] [PubMed]
- Bulgarelli, B.; Djavidnia, S. On MODIS Retrieval of Oil Spill Spectral Properties in the Marine Environment. IEEE Geosci. Remote Sens. Lett. 2011, 9, 398–402. [Google Scholar] [CrossRef]
- Alam, M.S.; Sidike, P. Trends in oil spill detection via hyperspectral imaging. In Proceedings of the 2012 7th International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 20–22 December 2012; pp. 858–862. [Google Scholar]
- Bradford, B.N.; Sanchez-Reyes, P.J. Automated oil spill detection with multispectral imagery. SPIE Def. Secur. Sens. 2011, 8030, 80300. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. A review of oil spill remote sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, C.; Yang, Y.; Zhou, M.; Zhan, W.; Cheng, W. Automatic extraction of offshore platforms using time-series Landsat-8 Operational Land Imager data. Remote Sens. Environ. 2016, 175, 73–91. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, C. Oil Tank Detection Using Co-Spatial Residual and Local Gradation Statistic in SAR Images. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 2000–2004. [Google Scholar]
- Jivane, N.; Soundrapandiyan, R. Enhancement of an Algorithm for Oil Tank Detection in Satellite Images. Int. J. Intell. Eng. Syst. 2017, 10, 218–225. [Google Scholar] [CrossRef]
- Zalpour, M.; Akbarizadeh, G.; Alaei-Sheini, N. A new approach for oil tank detection using deep learning features with control false alarm rate in high-resolution satellite imagery. Int. J. Remote Sens. 2020, 41, 2239–2262. [Google Scholar] [CrossRef]
- Ok, A.O.; Baseski, E. Circular Oil Tank Detection from Panchromatic Satellite Images: A New Automated Approach. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1347–1351. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, Z.; Wu, J. A Hierarchical Oil Tank Detector with Deep Surrounding Features for High-Resolution Optical Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4895–4909. [Google Scholar] [CrossRef]
- Zhang, N.; Liu, Y.; Zou, L.; Zhao, H.; Dong, W.; Zhou, H.; Zhou, H.; Huang, M. Automatic Recognition of Oil Industry Facilities Based on Deep Learning. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2519–2522. [Google Scholar]
- Patri, O.P.; Sorathia, V.S.; Prasanna, V.K. Event-driven information integration for the digital oilfield. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 8–10 October 2012. [Google Scholar]
- Ershaghi, I.; Paul, D.; Hauser, M.; Crompton, J.; Sankur, V. CiSoft and smart oilfield technologies. In Proceedings of the Society of Petroleum Engineers—SPE Intelligent Energy International Conference and Exhibition, Aberdeen, UK, 6–8 September 2016. [Google Scholar]
- Hussain, R.F.; Salehi, M.A.; Semiari, O. Serverless Edge Computing for Green Oil and Gas Industry. In Proceedings of the 2019 IEEE Green Technologies Conference, Lafayette, LA, USA, 3–6 April 2019. [Google Scholar]
- Zhuo, J.; Dang, H.; Wu, H.; Pang, H. Pattern Recognition for the Working Condition Diagnosis of Oil Well Based on Electrical Parameters. In Proceedings of the 2018 5th IEEE International Conference on Cloud Computing and Intelligence Systems (CCIS), Nanjing, China, 23–25 November 2018; pp. 557–561. [Google Scholar]
- Sun, L.; Shi, H.; Bai, M. Intelligent oil well identification modelling based on deep learning and neural network. Enterp. Inf. Syst. 2020, 1–15. [Google Scholar] [CrossRef]
- Vakalopoulou, M.; Karantzalos, K.; Komodakis, N.; Paragios, N. Building detection in very high resolution multispectral data with deep learning features. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1873–1876. [Google Scholar]
- Prathap, G.; Afanasyev, I. Deep Learning Approach for Building Detection in Satellite Multispectral Imagery. In Proceedings of the 2018 International Conference on Intelligent Systems (IS), Funchal, Portugal, 25–27 September 2018; pp. 461–465. [Google Scholar]
- Yang, X.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic Ship Detection in Remote Sensing Images from Google Earth of Complex Scenes Based on Multiscale Rotation Dense Feature Pyramid Networks. Remote Sens. 2018, 10, 132. [Google Scholar] [CrossRef]
- Li, Q.; Mou, L.; Liu, Q.; Wang, Y.; Zhu, X.X. HSF-Net: Multiscale Deep Feature Embedding for Ship Detection in Optical Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7147–7161. [Google Scholar] [CrossRef]
- Lin, H.; Shi, Z.; Zou, Z. Fully Convolutional Network with Task Partitioning for Inshore Ship Detection in Optical Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1665–1669. [Google Scholar] [CrossRef]
- Zhang, F.; Du, B.; Zhang, L.; Xu, M. Weakly Supervised Learning Based on Coupled Convolutional Neural Networks for Aircraft Detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5553–5563. [Google Scholar] [CrossRef]
- Fu, K.; Dai, W.; Zhang, Y.; Wang, Z.; Yan, M.; Sun, X. MultiCAM: Multiple Class Activation Mapping for Aircraft Recognition in Remote Sensing Images. Remote Sens. 2019, 11, 544. [Google Scholar] [CrossRef]
- Long, Y.; Gong, Y.; Xiao, Z.; Liu, Q. Accurate Object Localization in Remote Sensing Images Based on Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2486–2498. [Google Scholar] [CrossRef]
- Zou, Z.; Shi, Z. Random Access Memories: A New Paradigm for Target Detection in High Resolution Aerial Remote Sensing Images. IEEE Trans. Image Process. 2017, 27, 1100–1111. [Google Scholar] [CrossRef]
- Cheng, G.; Zhou, P.; Han, J. Learning Rotation-Invariant Convolutional Neural Networks for Object Detection in VHR Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7405–7415. [Google Scholar] [CrossRef]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of Deep Networks to Oil Spill Detection Using Polarimetric Synthetic Aperture Radar Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Krestenitis, M.; Orfanidis, G.; Ioannidis, K.; Avgerinakis, K.; Vrochidis, S.; Kompatsiaris, I. Oil Spill Identification from Satellite Images Using Deep Neural Networks. Remote Sens. 2019, 11, 1762. [Google Scholar] [CrossRef]
- Jiao, Z.; Jia, C.G.; Cai, C.Y. A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles. Comput. Ind. Eng. 2019, 135, 1300–1311. [Google Scholar] [CrossRef]
- Song, G.; Wang, Z.; Bai, L.; Zhang, J.; Chen, L. Detection of oil wells based on faster R-CNN in optical satellite remote sensing images. SPIE Proc. 2020, 11533. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Li, F.-F. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- NEPU-OWOD V1.0 (Northeast Petroleum University—Oil Well Object Detection V1.0). Available online: https://drive.google.com/drive/folders/1bGOAcASCPGKKkyrBDLXK9rx_cekd7a2u?usp=sharing (accessed on 28 December 2020).
- RSLabel. Available online: https://github.com/qq2898/RSLabel (accessed on 29 July 2020).
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef]
- Soviany, P.; Ionescu, R.T. Optimizing the Trade-Off between Single-Stage and Two-Stage Deep Object Detectors using Image Difficulty Prediction. In Proceedings of the 2018 20th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing (SYNASC), Timisoara, Romania, 20–23 September 2018; pp. 209–214. [Google Scholar]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A Survey of Deep Learning-Based Object Detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- Zhao, Z.-Q.; Zheng, P.; Xu, S.-T.; Wu, X. Object Detection with Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef]
- Jung, H.; Choi, M.K.; Jung, J.; Lee, J.H.; Kwon, S.; Jung, W.Y. ResNet-Based Vehicle Classification and Localization in Traffic Surveillance Systems. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Lin, T.-Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Uijlings, J.R.R.; Van De Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. Comput. Vis. Pattern Recognit. 2016. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Goyal, P.; Girshick, R.B.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO v.3. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Wang, Q.; Bi, S.; Sun, M.; Wang, Y.; Wang, D.; Yang, S. Deep learning approach to peripheral leukocyte recognition. PLoS ONE 2019, 14, e0218808. [Google Scholar] [CrossRef]
- Zhang, E.; Zhang, Y. Average Precision. In Encyclopedia of Database Systems; Metzler, J.B., Ed.; Springer: Boston, MA, USA, 2009; pp. 192–193. [Google Scholar]
- McNemar, Q. Note on the sampling error of the difference between correlated proportions or percentages. Psychometrika 1947, 12, 153–157. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Indrayan, A. Receiver operating characteristic (ROC) curve for medical researchers. Indian Pediatr. 2011, 48, 277–287. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Backbone |
|---|---|
| Faster R-CNN | ResNet-50-FPN |
| ResNet-50-C4 | |
| ResNet-50-DC5 | |
| ResNet-101-FPN | |
| ResNet-101-C4 | |
| ResNet-101-DC5 | |
| SSD | VGG16 |
| YOLOv3 | Darknet-53 |
| RetinaNet | ResNet-50-FPN |
| Model | Backbone | Precision | Recall | F1 Score | Training Time (Min) | Memory Cost (M) |
|---|---|---|---|---|---|---|
| Faster_R-CNN | R50-FPN | 0.684 | 0.919 | 0.784 | 102 | 2131 |
| R50-C4 | 0.742 | 0.875 | 0.803 | 319 | 4379 | |
| R50-DC5 | 0.738 | 0.897 | 0.810 | 171 | 5688 | |
| R101-FPN | 0.724 | 0.879 | 0.794 | 142 | 5200 | |
| R101-C4 | 0.734 | 0.924 | 0.818 | 354 | 5211 | |
| R101-DC5 | 0.764 | 0.928 | 0.838 | 196 | 7130 | |
| SSD | Darknet-53 | 0.807 | 0.674 | 0.734 | 33 | 1803 |
| YOLOv3 | VGG16 | 0.166 | 0.267 | 0.205 | 92 | 5107 |
| RetinaNet | R50-FPN | 0.645 | 0.892 | 0.749 | 147 | 6768 |
| Model | Backbone | AP | AP50 | AP75 | Training Time (min) | Memory Cost (M) |
|---|---|---|---|---|---|---|
| Faster_R-CNN | R50-FPN | 52.941 | 89.547 | 56.974 | 102 | 2131 |
| R50-C4 | 48.768 | 85.785 | 51.982 | 319 | 4379 | |
| R50-DC5 | 50.230 | 89.469 | 48.969 | 171 | 5688 | |
| R101-FPN | 49.177 | 84.863 | 49.202 | 142 | 5200 | |
| R101-C4 | 52.292 | 88.720 | 56.013 | 354 | 5211 | |
| R101-DC5 | 50.034 | 87.408 | 52.935 | 196 | 7130 | |
| SSD | Darknet-53 | 43.298 | 85.853 | 36.103 | 33 | 1803 |
| YOLOv3 | VGG16 | 3.698 | 7.653 | 3.061 | 92 | 5107 |
| RetinaNet | R50-FPN | 55.529 | 99.795 | 55.317 | 147 | 6768 |
| Faster_R-CNN | SSD | YOLO v3 | RetinaNet | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| McNemar’s Chi Squared (p-Value) | R50- FPN | R50-C4 | R50- DC5 | R101- FPN | R101- C4 | R101- DC5 | Darknet-53 | VGG16 | R50- FPN | |
| Faster_R-CNN | R50-FPN | |||||||||
| R50-C4 | 0.025 | |||||||||
| R50-DC5 | 1 | 0.008 | ||||||||
| R101-FPN | 0.180 | 0.285 | 0.083 | |||||||
| R101-C4 | 1 | 0.018 | 1 | 0.083 | ||||||
| R101-DC5 | 1 | 0.018 | 1 | 0.109 | 1 | |||||
| SSD | Darknet-53 | <0.001 | 0.002 | <0.001 | <0.001 | <0.001 | <0.001 | |||
| YOLOv3 | VGG16 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | ||
| RetinaNet | R50-FPN | 0.593 | 0.074 | 0.637 | 0.371 | 0.637 | 0.637 | <0.001 | <0.001 | |
| Bare Land | Trees | Buildings | Lakes | Horizontal | Non- Horizontal | |
|---|---|---|---|---|---|---|
| Total number of the oil wells in the test dataset | 148 | 36 | 30 | 10 | 157 | 67 |
| Model | Backbone | Performance Metric | Bare land | Trees | Buildings | Lakes | Horizontal | Non- Horizontal |
|---|---|---|---|---|---|---|---|---|
| Faster_R-CNN | R50-FPN | Precision | 0.623 | 0.459 | 0.472 | 0.909 | 0.569 | 0.401 |
| Recall | 0.926 | 0.944 | 0.833 | 1.000 | 0.924 | 0.821 | ||
| F1 score | 0.745 | 0.618 | 0.602 | 0.952 | 0.704 | 0.539 | ||
| R50-C4 | Precision | 0.690 | 0.500 | 0.413 | 1.000 | 0.621 | 0.514 | |
| Recall | 0.919 | 0.861 | 0.633 | 1.000 | 0.885 | 0.851 | ||
| F1 score | 0.788 | 0.633 | 0.500 | 1.000 | 0.730 | 0.640 | ||
| R50-DC5 | Precision | 0.688 | 0.443 | 0.477 | 0.909 | 0.621 | 0.504 | |
| Recall | 0.939 | 0.861 | 0.700 | 1.000 | 0.898 | 0.896 | ||
| F1 score | 0.794 | 0.585 | 0.568 | 0.952 | 0.734 | 0.645 | ||
| R101-FPN | Precision | 0.659 | 0.484 | 0.500 | 0.909 | 0.604 | 0.492 | |
| Recall | 0.912 | 0.833 | 0.733 | 1.000 | 0.885 | 0.866 | ||
| F1 score | 0.765 | 0.612 | 0.595 | 0.952 | 0.718 | 0.627 | ||
| R101-C4 | Precision | 0.664 | 0.500 | 0.481 | 1.000 | 0.606 | 0.508 | |
| Recall | 0.946 | 0.889 | 0.833 | 1.000 | 0.930 | 0.910 | ||
| F1 score | 0.780 | 0.640 | 0.610 | 1.000 | 0.734 | 0.652 | ||
| R101-DC5 | Precision | 0.688 | 0.443 | 0.477 | 0.909 | 0.646 | 0.541 | |
| Recall | 0.939 | 0.861 | 0.700 | 1.000 | 0.943 | 0.896 | ||
| F1 score | 0.794 | 0.585 | 0.568 | 0.952 | 0.767 | 0.674 | ||
| SSD | Darknet-53 | Precision | 0.735 | 0.452 | 0.536 | 1.000 | 0.703 | 0.530 |
| Recall | 0.730 | 0.528 | 0.500 | 0.900 | 0.739 | 0.522 | ||
| F1 score | 0.732 | 0.487 | 0.517 | 0.947 | 0.720 | 0.526 | ||
| YOLOv3 | VGG16 | Precision | 0.172 | 0.074 | 0.123 | 0.000 | 0.093 | 0.195 |
| Recall | 0.311 | 0.194 | 0.233 | 0.000 | 0.178 | 0.478 | ||
| F1 score | 0.221 | 0.107 | 0.161 | 0.000 | 0.123 | 0.277 | ||
| RetinaNet | R50-FPN | Precision | 0.604 | 0.394 | 0.424 | 0.909 | 0.569 | 0.401 |
| Recall | 0.926 | 0.778 | 0.833 | 1.000 | 0.924 | 0.821 | ||
| F1 score | 0.731 | 0.523 | 0.562 | 0.952 | 0.704 | 0.539 | ||
| Precision | 0.614 | 0.417 | 0.434 | 0.838 | 0.559 | 0.454 | ||
| Averages | Recall | 0.839 | 0.750 | 0.666 | 0.878 | 0.812 | 0.785 | |
| F1 score | 0.706 | 0.532 | 0.520 | 0.856 | 0.659 | 0.569 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Bai, L.; Song, G.; Zhang, J.; Tao, J.; Mulvenna, M.D.; Bond, R.R.; Chen, L. An Oil Well Dataset Derived from Satellite-Based Remote Sensing. Remote Sens. 2021, 13, 1132. https://doi.org/10.3390/rs13061132
Wang Z, Bai L, Song G, Zhang J, Tao J, Mulvenna MD, Bond RR, Chen L. An Oil Well Dataset Derived from Satellite-Based Remote Sensing. Remote Sensing. 2021; 13(6):1132. https://doi.org/10.3390/rs13061132
Chicago/Turabian StyleWang, Zhibao, Lu Bai, Guangfu Song, Jie Zhang, Jinhua Tao, Maurice D. Mulvenna, Raymond R. Bond, and Liangfu Chen. 2021. "An Oil Well Dataset Derived from Satellite-Based Remote Sensing" Remote Sensing 13, no. 6: 1132. https://doi.org/10.3390/rs13061132
APA StyleWang, Z., Bai, L., Song, G., Zhang, J., Tao, J., Mulvenna, M. D., Bond, R. R., & Chen, L. (2021). An Oil Well Dataset Derived from Satellite-Based Remote Sensing. Remote Sensing, 13(6), 1132. https://doi.org/10.3390/rs13061132