
Joint Use of in-Scene Background Radiance Estimation and Optimal Estimation Methods for Quantifying Methane Emissions Using PRISMA Hyperspectral Satellite Data: Application to the Korpezhe Industrial Site

 , ,
, , 
Abstract
:1. Introduction
2. Data
2.1. Hyperspectral Images
2.2. Wind Information
3. Methods
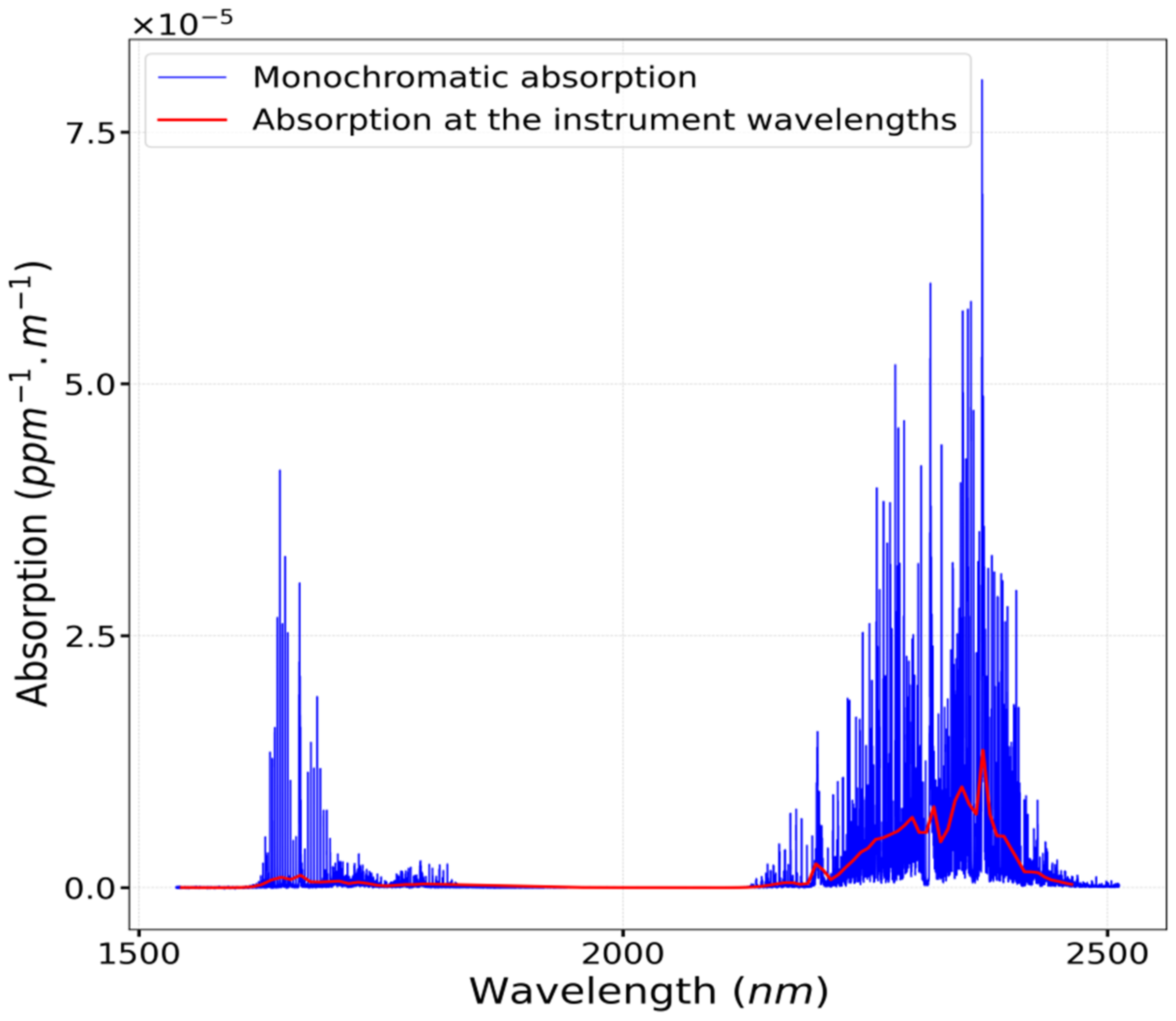
3.1. Direct Model of Radiance as a Function of Plume Concentration
3.2. Plume Segmentation
3.3. Quantification Step: Concentration
3.3.1. Linear Method (LM)
3.3.2. Optimal Estimation (OE) Method
3.3.3. in-Scene Background Radiance (ISBR)—Optimal Estimation Method (OEM)
3.4. Quantification Step: Flow Rate
3.4.1. Integrated Mass Enhancement (IME) Method
3.4.2. Cross-Sectional Flux (CSF) Method
3.4.3. Rings Decomposition of Mass (RDM) Method
4. Results
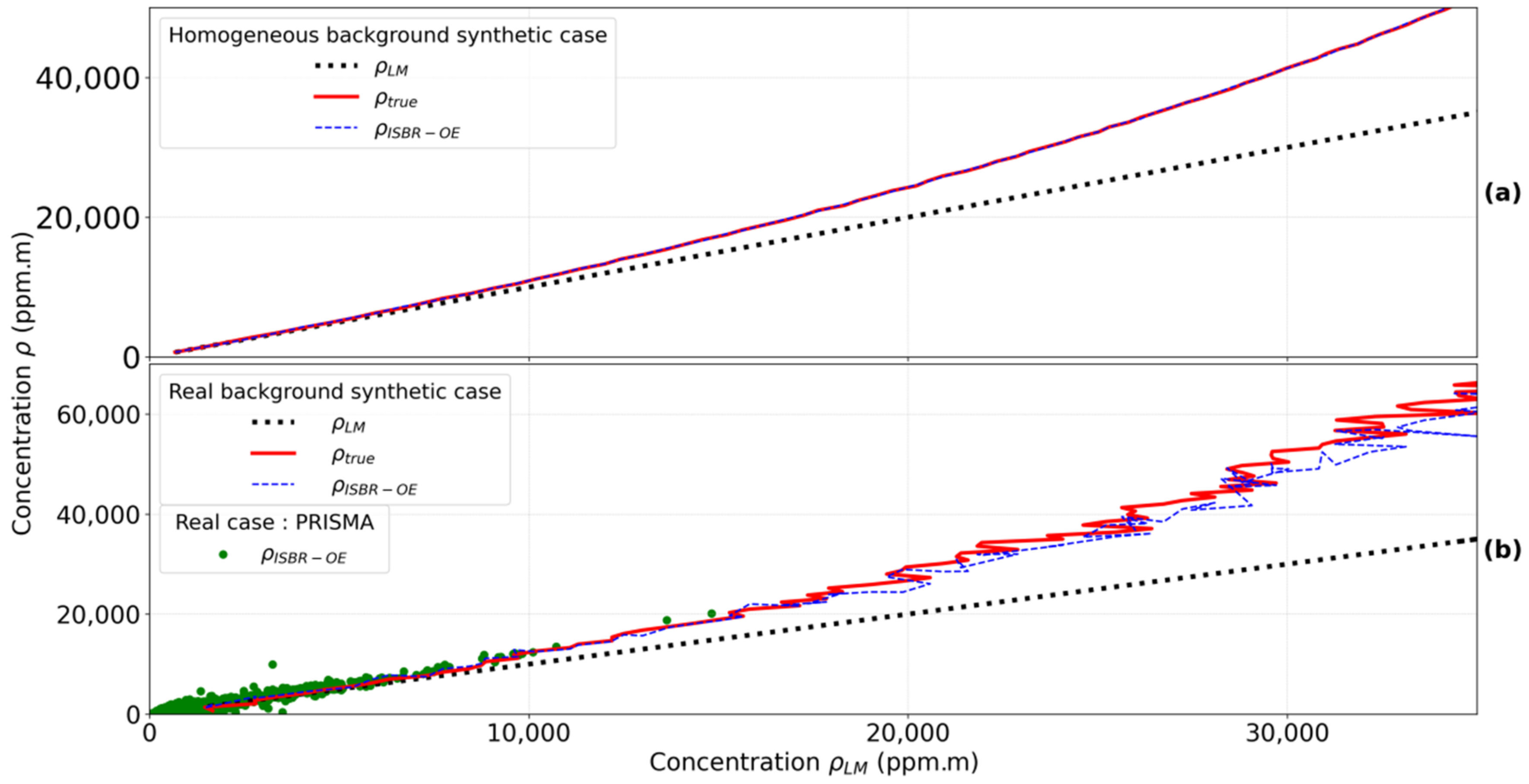
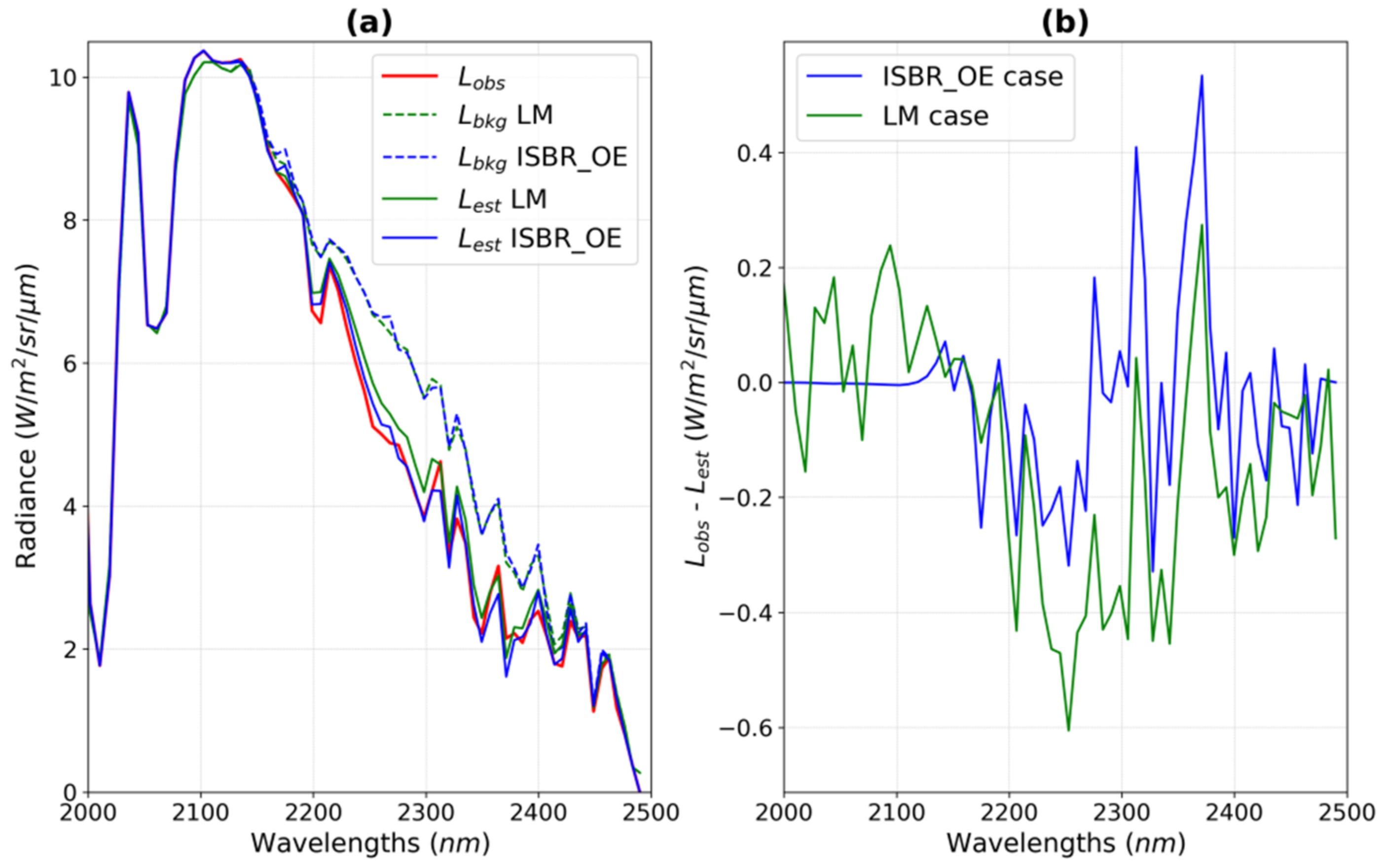
4.1. LM versus ISBR-OEM
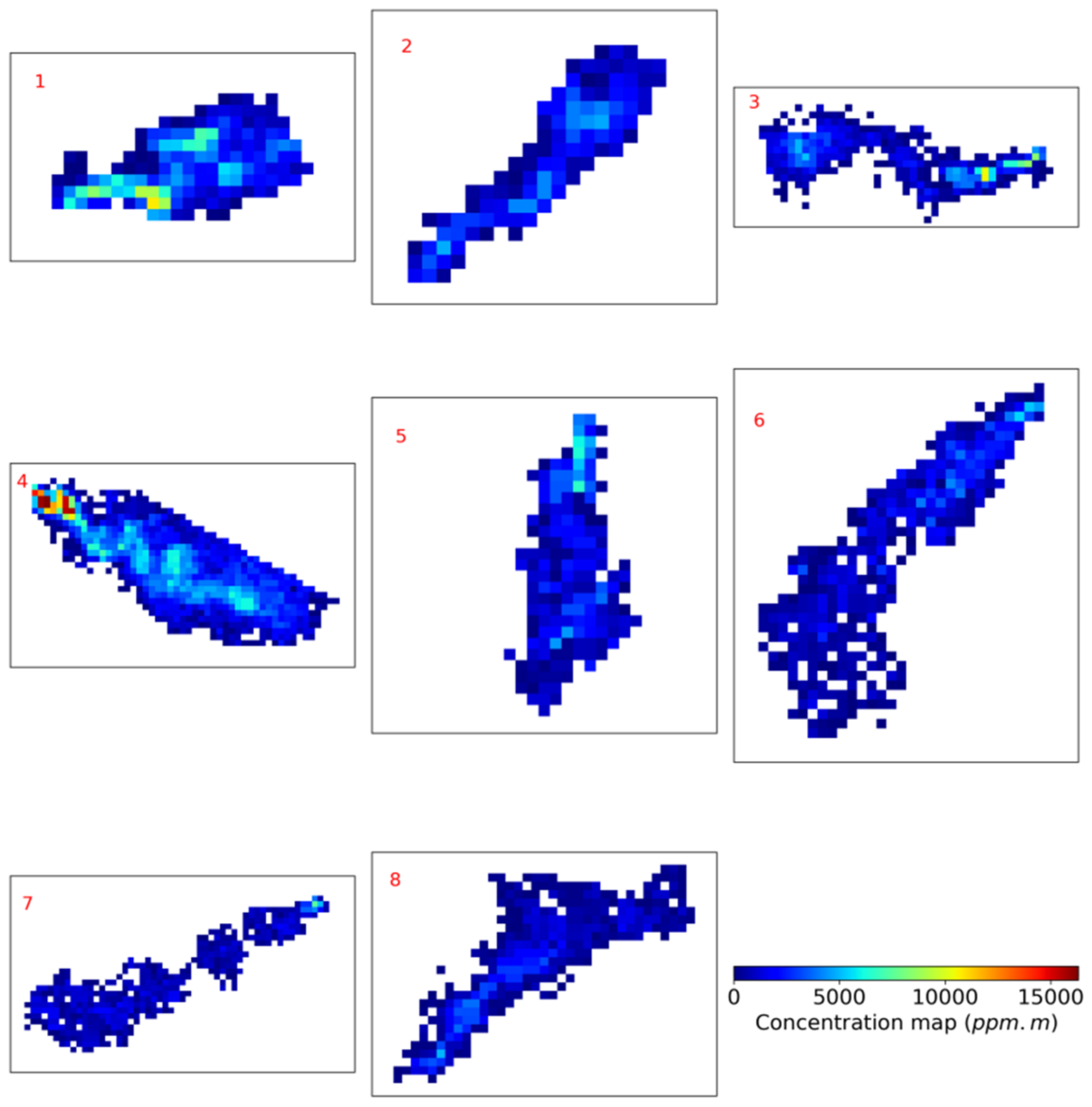
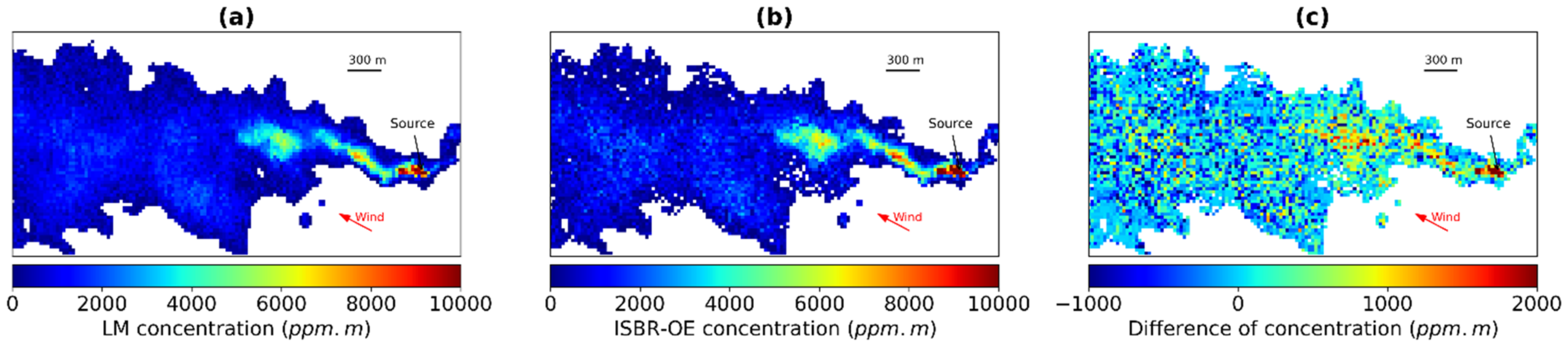
4.2. Overview of the Concentration Map
4.3. Mass per Unit Length or Wind Normalized Flow Rate Analysis
5. Discussion
5.1. Source Wind Normalized Flow Rate Estimation
5.2. Wind Information and Flow Rate Estimation
5.3. Manual Intervention
5.4. Overestimation Area
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

Appendix B
Appendix C
Appendix D

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Source | (g·m−1) | (g·m−1) | (g·m−1) | Masse Max (kg) | Total Mass (kg) | Number of Plume Pixels |
|---|---|---|---|---|---|---|---|
| 2020/04/19 | A | 339.6 ± 16.4 | 339.9 ± 17.1 | 629.7 ± 81.5 | 6.33 | 224.3 ± 29.0 | 141 |
| 2020/06/22 | A | 140.7 ± 16.8 | 148.1 ± 19.0 | 338.9 ± 80.1 | 2.83 | 102.2 ± 24.2 | 101 |
| 2020/06/22 | D | 131.7 ± 16.1 | 128.4 ± 17.1 | 298.6 ± 95.2 | 2.91 | 154.1 ± 49.2 | 296 |
| 2020/07/03 | A | 204.6 ± 19.4 | 232.0 ± 23.9 | 392.0 ± 75.2 | 6.22 | 104.5 ± 20.0 | 79 |
| 2020/07/21 | A | 617.0 ± 21.8 | 635.5 ± 23.4 | 1443.0 ± 181.5 | 11.91 | 1258.4 ± 158.3 | 845 |
| 2020/08/07 | A | 653.5 ± 29.6 | 666.1 ± 31.8 | 1357.0 ± 200.9 | 9.64 | 1039.5 ± 153.9 | 652 |
| 2020/08/07 | C | 182.5 ± 22.4 | 183.0 ± 25.4 | 297.8 ± 82.2 | 4.01 | 76.8 ± 21.2 | 74 |
| 2020/10/10 | D | 413.2 ± 17.8 | 458.0 ± 20.4 | 666.4 ± 85.1 | 8.46 | 247.3 ± 31.6 | 153 |
| 2020/11/14 | B | 732.6 ± 39.3 | 781.4 ± 42.3 | 1185.5 ± 227.0 | 7.06 | 703.2 ± 134.6 | 391 |
| 2021/02/09 | A | 209.2 ± 26.8 | 209.2 ± 26.4 | 305.4 ± 70.8 | 3.89 | 56.5 ± 13.1 | 38 |
| 2021/03/10 | A | 177.1 ± 28.8 | 186.9 ± 33.0 | 334.7 ± 121.4 | 3.23 | 100.9 ± 36.6 | 101 |
| 2021/04/14 | A | 121.6 ± 22.1 | 121.7 ± 24.0 | 199.6 ± 73.8 | 4.42 | 40.2 ± 14.8 | 45 |
| 2021/06/22 | A | 533.1 ± 16.1 | 558.4 ± 17.2 | 1222.2 ± 114.1 | 9.10 | 720.4 ± 67.3 | 386 |
| Date | Source | (g·m−1) | (g·m−1) | (g·m−1) | Mass Max (kg) | Total Mass (kg) | Number of Plume Pixels |
|---|---|---|---|---|---|---|---|
| 2020/04/19 | A | - | - | - | - | - | - |
| 2020/06/22 | A | - | - | - | - | - | - |
| 2020/06/22 | D | - | - | - | - | - | - |
| 2020/07/03 | A | 208.4 ± 24.7 | 198.0 ± 26.1 | 486.6 ± 142.7 | 6.22 | 237.7 ± 69.7 | 265 |
| 2020/07/21 | A | 727.0 ± 36.8 | 746.8 ± 39.9 | 1572.7 ± 455.2 | 11.91 | 3271.3 ± 946.7 | 4807 |
| 2020/08/07 | A | - | - | - | - | - | - |
| 2020/08/07 | C | 381.3 ± 33.3 | 392.3 ± 36.5 | 642.3 ± 185.2 | 4.01 | 411.9 ± 118.8 | 457 |
| 2020/10/10 | D | 530.4 ± 24.7 | 539.1 ± 25.7 | 1157.4 ± 207.4 | 8.46 | 1035.2 ± 185.5 | 889 |
| 2020/11/14 | B | 1022.3 ± 56.0 | 1170.3 ± 64.0 | 1580.5 ± 547.2 | 7.06 | 2668.3 ± 923.8 | 3167 |
| 2021/02/09 | A | 179.9 ± 28.3 | 179.9 ± 28.5 | 382.7 ± 137.4 | 3.89 | 145.7 ± 52.3 | 161 |
| 2021/03/10 | A | 157.0 ± 23.7 | 157.1 ± 25.9 | 368.7 ± 148.9 | 3.23 | 197.9 ± 79.9 | 320 |
| 2021/04/14 | A | 116.3 ± 24.0 | 156.2 ± 27.4 | 323.0 ± 178.3 | 4.42 | 192.3 ± 106.2 | 394 |
| 2021/06/22 | A | 548.4 ± 27.1 | 552.9 ± 28.4 | 1146.2 ± 324.6 | 9.1 | 2106.6 ± 596.5 | 3753 |
References
- Thorpe, A.K.; Duren, R.M.; Conley, S.; Prasad, K.R.; Bue, B.D.; Yadav, V.; Foster, K.T.; Rafiq, T.; Hopkins, F.M.; Smith, M.L.; et al. Methane emissions from underground gas storage in California. Environ. Res. Lett. 2020, 15, 45005. [Google Scholar] [CrossRef]
- Ravishankara, A.R.; Kulenstierna, J.; Michalopoulou, E.; Höglund- Isaksson, L.; Zhang, Y.; Seltzer, K.; Ru, M.; Castelino, R.; Faluvegi, G.; Naik, V.; et al. Benefits and Costs of Mitigating Methane Emissions. 2021. Available online: https://wedocs.unep.org/bitstream/handle/20.500.11822/35917/GMA_ES.pdf (accessed on 11 August 2021).
- Turner, M.C.; Jerrett, M.; Pope, C.A.; Krewski, D.; Gapstur, S.M.; Diver, W.R.; Beckerman, B.S.; Marshall, J.D.; Su, J.; Crouse, D.L.; et al. Long-Term Ozone Exposure and Mortality in a Large Prospective Study. Am. J. Respir. Crit. Care Med. 2016, 193, 1134–1142. [Google Scholar] [CrossRef] [Green Version]
- Forster, P.; Ramaswamy, V.; Artaxo, P.; Berntsen, T.; Betts, R.; Fahey, D.W.; Haywood, J.; Lean, J.; Lowe, D.C.; Myhre, G.; et al. Changes in atmospheric constituents and in radiative forcing. Chapter 2. In Climate Change 2007. The Physical Science Basis; Cambridge University Press: Cambridge, UK, 2007; ISBN 978-0521-70596-7. [Google Scholar]
- Hu, H.; Landgraf, J.; Detmers, R.; Borsdorff, T.; Aan de Brugh, J.; Aben, I.; Butz, A.; Hasekamp, O. Toward Global Mapping of Methane With TROPOMI: First Results and Intersatellite Comparison to GOSAT. Geophys. Res. Lett. 2018, 45, 3682–3689. [Google Scholar] [CrossRef]
- USA. Inventory of Greenhouse Gas Emissions and Sinks 1990–2014; U.S. Environmentale Protection Agency: Washington, DC, USA, 2016.
- Borchardt, J.; Gerilowski, K.; Krautwurst, S.; Bovensmann, H.; Thorpe, A.K.; Thompson, D.R.; Frankenberg, C.; Miller, C.E.; Duren, R.M.; Burrows, J.P. Detection and quantification of CH4 plumes using the WFM-DOAS retrieval on AVIRIS-NG hyperspectral data. Atmos. Meas. Tech. 2021, 14, 1267–1291. [Google Scholar] [CrossRef]
- Krings, T.; Gerilowski, K.; Buchwitz, M.; Hartmann, J.; Sachs, T.; Erzinger, J.; Burrows, J.P.; Bovensmann, H. Quantification of methane emission rates from coal mine ventilation shafts using airborne remote sensing data. Atmos. Meas. Tech. 2013, 6, 151–166. [Google Scholar] [CrossRef] [Green Version]
- Ialongo, I.; Stepanova, N.; Hakkarainen, J.; Virta, H.; Gritsenko, D. Satellite-based estimates of nitrogen oxide and methane emissions from gas flaring and oil production activities in Sakha Republic, Russia. Atmos. Environ. X 2021, 11, 100114. [Google Scholar] [CrossRef]
- Anenberg, S.C.; Schwartz, J.; Shindell, D.; Amann, M.; Faluvegi, G.; Klimont, Z.; Janssens-Maenhout, G.; Pozzoli, L.; van Dingenen, R.; Vignati, E.; et al. Global air quality and health co-benefits of mitigating near-term climate change through methane and black carbon emission controls. Environ. Health Perspect. 2012, 120, 831–839. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baray, S.; Darlington, A.; Gordon, M.; Hayden, K.L.; Leithead, A.; Li, S.M.; Liu, P.S.K.; Mittermeier, R.L.; Moussa, S.G.; O’Brien, J.; et al. Quantification of methane sources in the Athabasca Oil Sands Region of Alberta by aircraft mass balance. Atmos. Chem. Phys. 2018, 18, 7361–7378. [Google Scholar] [CrossRef] [Green Version]
- Shindell, D.T.; Fuglestvedt, J.S.; Collins, W.J. The social cost of methane: Theory and applications. Faraday Discuss. 2017, 200, 429–451. [Google Scholar] [CrossRef] [PubMed]
- Lelieved, J.; Crutzen, P.J.; Dentener, F.J. Changing concentration, lifetime and climate forcing of atmospheric methane. Tellus B 1998, 50, 128–150. [Google Scholar] [CrossRef]
- Prather, M.J.; Holmes, C.D.; Hsu, J. Reactive greenhouse gas scenarios: Systematic exploration of uncertainties and the role of atmospheric chemistry. Geophys. Res. Lett. 2012, 39, 6–10. [Google Scholar] [CrossRef] [Green Version]
- Nisbet, E.G.; Manning, M.R.; Dlugokencky, E.J.; Fisher, R.E.; Lowry, D.; Michel, S.E.; Myhre, C.L.; Platt, S.M.; Allen, G.; Bousquet, P.; et al. Very Strong Atmospheric Methane Growth in the 4 Years 2014–2017: Implications for the Paris Agreement. Global Biogeochem. Cycles 2019, 33, 318–342. [Google Scholar] [CrossRef]
- Foote, M.D.; Dennison, P.E.; Thorpe, A.K.; Thompson, D.R.; Jongaramrungruang, S.; Frankenberg, C.; Joshi, S.C. Fast and Accurate Retrieval of Methane Concentration From Imaging Spectrometer Data Using Sparsity Prior. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6480–6492. [Google Scholar] [CrossRef] [Green Version]
- Pandey, S.; Gautam, R.; Houweling, S.; van der Gon, H.D.; Sadavarte, P.; Borsdorff, T.; Hasekamp, O.; Landgraf, J.; Tol, P.; van Kempen, T.; et al. Satellite observations reveal extreme methane leakage from a natural gas well blowout. Proc. Natl. Acad. Sci. USA 2019, 116, 26376–26381. [Google Scholar] [CrossRef]
- Etheridge, D.M.; Steele, L.P.; Francey, R.J.; Langenfelds, R.L. Atmospheric methane between 1000 A.D. and present: Evidence of anthropogenic emissions and climatic variability. J. Geophys. Res. Atmos. 1998, 103, 15979–15993. [Google Scholar] [CrossRef]
- Bousquet, P.; Ciais, P.; Miller, J.B.; Dlugokencky, E.J.; Hauglustaine, D.A.; Prigent, C.; Van der Werf, G.R.; Peylin, P.; Brunke, E.-G.; Carouge, C.; et al. Contribution of anthropogenic and natural sources to atmospheric methane variability. Nature 2006, 443, 439–443. [Google Scholar] [CrossRef]
- Krautwurst, S.; Gerilowski, K.; Jonsson, H.H.; Thompson, D.R.; Kolyer, R.W.; Iraci, L.T.; Thorpe, A.K.; Horstjann, M.; Eastwood, M.; Leifer, I.; et al. Methane emissions from a Californian landfill, determined from airborne remote sensing and in situ measurements. Atmos. Meas. Tech. 2017, 10, 3429–3452. [Google Scholar] [CrossRef] [Green Version]
- Kirschke, S.; Bousquet, P.; Ciais, P.; Saunois, M.; Canadell, J.G.; Dlugokencky, E.J.; Bergamaschi, P.; Bergmann, D.; Blake, D.R.; Bruhwiler, L.; et al. Three decades of global methane sources and sinks. Nat. Geosci. 2013, 6, 813–823. [Google Scholar] [CrossRef]
- Wecht, K.J.; Jacob, D.J.; Sulprizio, M.P.; Santoni, G.W.; Wofsy, S.C.; Parker, R.; Bösch, H.; Worden, J. Spatially resolving methane emissions in California: Constraints from the CalNex aircraft campaign and from present (GOSAT, TES) and future (TROPOMI, geostationary) satellite observations. Atmos. Chem. Phys. 2014, 14, 8173–8184. [Google Scholar] [CrossRef] [Green Version]
- Thorpe, A.K.; Roberts, D.A.; Bradley, E.S.; Funk, C.C.; Dennison, P.E.; Leifer, I. High resolution mapping of methane emissions from marine and terrestrial sources using a Cluster-Tuned Matched Filter technique and imaging spectrometry. Remote Sens. Environ. 2013, 134, 305–318. [Google Scholar] [CrossRef]
- Rodgers, C.D. Inverse Methods for Atmospheric, Theory and Practise; World Scientific: London, UK, 2000. [Google Scholar]
- Voors, R.; Bhatti, I.S.; Wood, T.; Aben, I.; Veefkind, P.; de Vries, J.; Lobb, D.; van der Valk, N. TROPOMI, the Sentinel 5 precursor instrument for air quality and climate observations: Status of the current design. In Proceedings of the International Conference on Space Optics–ICSO 2012; Armandillo, E., Karafolas, N., Cugny, B., Eds.; SPIE: Bellingham, WA, USA, 2017; Volume 10564, p. 3. [Google Scholar]
- Larsen, K.; Delgado, M.; Martsters, P. Untapped Potential: Reducing Global Methane EMissions from Oil and Natural Gas Systems. 2015. Available online: https://rhg.com/research/untapped-potential-reducing-global-methane-emissions-from-oil-and-natural-gas-systems/ (accessed on 12 June 2021).
- Frankenberg, C.; Thorpe, A.K.; Thompson, D.R.; Hulley, G.; Kort, E.A.; Vance, N.; Borchardt, J.; Krings, T.; Gerilowski, K.; Sweeney, C.; et al. Airborne methane remote measurements reveal heavytail flux distribution in Four Corners region. Proc. Natl. Acad. Sci. USA 2016, 113, 9734–9739. [Google Scholar] [CrossRef] [Green Version]
- Chapman, J.W.; Thompson, D.R.; Helmlinger, M.C.; Bue, B.D.; Green, R.O.; Eastwood, M.L.; Geier, S.; Olson-Duvall, W.; Lundeen, S.R. Spectral and Radiometric Calibration of the Next Generation Airborne Visible Infrared Spectrometer (AVIRIS-NG). Remote Sens. 2019, 11, 2129. [Google Scholar] [CrossRef] [Green Version]
- Thompson, D.R.; Thorpe, A.K.; Frankenberg, C.; Green, R.O.; Duren, R.; Guanter, L.; Hollstein, A.; Middleton, E.; Ong, L.; Ungar, S. Space-based remote imaging spectroscopy of the Aliso Canyon CH 4 superemitter. Geophys. Res. Lett. 2016, 43, 6571–6578. [Google Scholar] [CrossRef] [Green Version]
- Thompson, D.R.; Leifer, I.; Bovensmann, H.; Eastwood, M.; Fladeland, M.; Frankenberg, C.; Gerilowski, K.; Green, R.O.; Kratwurst, S.; Krings, T.; et al. Real-time remote detection and measurement for airborne imaging spectroscopy: A case study with methane. Atmos. Meas. Tech. 2015, 8, 4383–4397. [Google Scholar] [CrossRef] [Green Version]
- Pearlman, J.S.; Barry, P.S.; Segal, C.C.; Shepanski, J.; Beiso, D.; Carman, S.L. Hyperion, a space-based imaging spectrometer. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1160–1173. [Google Scholar] [CrossRef]
- Folkman, M.A.; Pearlman, J.; Liao, L.B.; Jarecke, P.J. EO-1/Hyperion hyperspectral imager design, development, characterization, and calibration. In Hyperspectral Remote Sensing of the Land and Atmosphere; Smith, W.L., Yasuoka, Y., Eds.; SPIE: Bellingham, WA, USA, 2001; Volume 4151, pp. 40–51. [Google Scholar]
- Ayasse, A.K.; Dennison, P.E.; Foote, M.; Thorpe, A.K.; Joshi, S.; Green, R.O.; Duren, R.M.; Thompson, D.R.; Roberts, D.A. Methane Mapping with Future Satellite Imaging Spectrometers. Remote Sens. 2019, 11, 3054. [Google Scholar] [CrossRef] [Green Version]
- Varon, D.J.; McKeever, J.; Jervis, D.; Maasakkers, J.D.; Pandey, S.; Houweling, S.; Aben, I.; Scarpelli, T.; Jacob, D.J. Satellite Discovery of Anomalously Large Methane Point Sources From Oil/Gas Production. Geophys. Res. Lett. 2019, 46, 13507–13516. [Google Scholar] [CrossRef] [Green Version]
- Labate, D.; Ceccherini, M.; Cisbani, A.; De Cosmo, V.; Galeazzi, C.; Giunti, L.; Melozzi, M.; Pieraccini, S.; Stagi, M. The PRISMA payload optomechanical design, a high performance instrument for a new hyperspectral mission. Acta Astronaut. 2009, 65, 1429–1436. [Google Scholar] [CrossRef]
- Guanter, L.; Irakulis-Loitxate, I.; Gorroño, J.; Sánchez-García, E.; Cusworth, D.H.; Varon, D.J.; Cogliati, S.; Colombo, R. Mapping methane point emissions with the PRISMA spaceborne imaging spectrometer. Remote Sens. Environ. 2021, 265, 112671. [Google Scholar] [CrossRef]
- Cusworth, D.H.; Jacob, D.J.; Varon, D.J.; Chan Miller, C.; Liu, X.; Chance, K.; Thorpe, A.K.; Duren, R.M.; Miller, C.E.; Thompson, D.R.; et al. Potential of next-generation imaging spectrometers to detect and quantify methane point sources from space. Atmos. Meas. Tech. 2019, 12, 5655–5668. [Google Scholar] [CrossRef] [Green Version]
- Irakulis-Loitxate, I.; Guanter, L.; Liu, Y.N.; Varon, D.J.; Maasakkers, J.D.; Zhang, Y.; Chulakadabba, A.; Wofsy, S.C.; Thorpe, A.K.; Duren, R.M.; et al. Satellite-based survey of extreme methane emissions in the Permian basin. Sci. Adv. 2021, 7, eabf4507. [Google Scholar] [CrossRef] [PubMed]
- Hulley, G.C.; Duren, R.M.; Hopkins, F.M.; Hook, S.J.; Vance, N.; Guillevic, P.; Johnson, W.R.; Eng, B.T.; Mihaly, J.M.; Jovanovic, V.M.; et al. High spatial resolution imaging of methane and other trace gases with the airborne Hyperspectral Thermal Emission Spectrometer (HyTES). Atmos. Meas. Tech. 2016, 9, 2393–2408. [Google Scholar] [CrossRef] [Green Version]
- Niu, S.; Golowich, S.E.; Ingle, V.K.; Manolakis, D.G. New approach to remote gas-phase chemical quantification: Selected-band algorithm. Opt. Eng. 2013, 53, 021111. [Google Scholar] [CrossRef]
- Cusworth, D.H.; Duren, R.M.; Thorpe, A.K.; Eastwood, M.L.; Green, R.O.; Dennison, P.E.; Frankenberg, C.; Heckler, J.W.; Asner, G.P.; Miller, C.E. Quantifying Global Power Plant Carbon Dioxide Emissions With Imaging Spectroscopy. AGU Adv. 2021, 2, e2020AV000350. [Google Scholar] [CrossRef]
- Dennison, P.E.; Thorpe, A.K.; Roberts, D.A.; Green, R.O. Modeling sensitivity of imaging spectrometer data to carbon dioxide and methane plumes. In Proceedings of the Workshop on Hyperspectral Image and Signal Processing, Evolution in Remote Sensing, Gainesville, FL, USA, 25–28 June 2013; Volume 2013, pp. 46–49. [Google Scholar]
- Funk, C.C.; Theiler, J.; Roberts, D.A.; Borel, C.C. Clustering to improve matched filter detection of weak gas plumes in hyperspectral thermal imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1410–1420. [Google Scholar] [CrossRef] [Green Version]
- Theiler, J.; Foy, B.R. Effect of Signal Contamination in Matched-Filter Detection of the Signal on a Cluttered Background. IEEE Geosci. Remote Sens. Lett. 2006, 3, 98–102. [Google Scholar] [CrossRef]
- Manolakis, D.; Lockwood, R.; Cooley, T.; Jacobson, J. Hyperspectral detection algorithms: Use covariances or subspaces? Imaging Spectrom. XIV 2009, 7457, 74570Q. [Google Scholar] [CrossRef]
- Duren, R.M.; Thorpe, A.K.; Foster, K.T.; Rafiq, T.; Hopkins, F.M.; Yadav, V.; Bue, B.D.; Thompson, D.R.; Conley, S.; Colombi, N.K.; et al. California’s methane super-emitters. Nature 2019, 575, 180–184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thompson, D.R.; Natraj, V.; Green, R.O.; Helmlinger, M.C.; Gao, B.C.; Eastwood, M.L. Optimal estimation for imaging spectrometer atmospheric correction. Remote Sens. Environ. 2018, 216, 355–373. [Google Scholar] [CrossRef]
- O’Dell, C.W.; Connor, B.; Bösch, H.; O’Brien, D.; Frankenberg, C.; Castano, R.; Christi, M.; Eldering, D.; Fisher, B.; Gunson, M.; et al. The ACOS CO2 retrieval algorithm-Part 1: Description and validation against synthetic observations. Atmos. Meas. Tech. 2012, 5, 99–121. [Google Scholar] [CrossRef] [Green Version]
- Cusworth, D.H.; Duren, R.M.; Yadav, V.; Thorpe, A.K.; Verhulst, K.; Sander, S.; Hopkins, F.; Rafiq, T.; Miller, C.E. Synthesis of Methane Observations Across Scales: Strategies for Deploying a Multitiered Observing Network. Geophys. Res. Lett. 2020, 47, e2020GL087869. [Google Scholar] [CrossRef]
- Thorpe, A.K.; Frankenberg, C.; Roberts, D.A. Retrieval techniques for airborne imaging of methane concentrations using high spatial and moderate spectral resolution: Application to AVIRIS. Atmos. Meas. Tech. 2014, 7, 491–506. [Google Scholar] [CrossRef] [Green Version]
- Jongaramrungruang, S.; Frankenberg, C.; Matheou, G.; Thorpe, A.K.; Thompson, D.R.; Kuai, L.; Duren, R.M. Towards accurate methane point-source quantification from high-resolution 2-D plume imagery. Atmos. Meas. Tech. 2019, 12, 6667–6681. [Google Scholar] [CrossRef] [Green Version]
- Vangi, E.; D’amico, G.; Francini, S.; Giannetti, F.; Lasserre, B.; Marchetti, M.; Chirici, G. The new hyperspectral satellite prisma: Imagery for forest types discrimination. Sensors 2021, 21, 1182. [Google Scholar] [CrossRef]
- Sharpe, S.W.; Johnson, T.J.; Sams, R.L.; Chu, P.M.; Rhoderick, G.C.; Johnson, P.A. Gas-phase databases for quantitative infrared spectroscopy. Appl. Spectrosc. 2004, 58, 1452–1461. [Google Scholar] [CrossRef]
- Romaniello, V.; Silvestri, M.; Buongiorno, M.F.; Musacchio, M. Comparison of PRISMA data with model simulations, hyperion reflectance and field spectrometer measurements on ‘piano delle concazze’ (Mt. Etna, Italy). Sensors 2020, 20, 7224. [Google Scholar] [CrossRef]
- Cogliati, S.; Sarti, F.; Chiarantini, L.; Cosi, M.; Lorusso, R.; Lopinto, E.; Miglietta, F.; Scheffler, D.; Tagliabue, G. The PRISMA imaging spectroscopy mission: Overview and first performance analysis. Remote Sens. Environ. 2021, 262, 112499. [Google Scholar] [CrossRef]
- Varon, D.J.; Jervis, D.; McKeever, J.; Spence, I.; Gains, D.; Jacob, D.J. High-frequency monitoring of anomalous methane point sources with multispectral Sentinel-2 satellite observations. Atmos. Meas. Tech. 2021, 14, 2771–2785. [Google Scholar] [CrossRef]
- Philippets, Y.; Foucher, P.-Y.; Marion, R.; Briottet, X. Anthropogenic aerosol emissions mapping and characterization by imaging spectroscopy–application to a metallurgical industry and a petrochemical complex. Int. J. Remote Sens. 2019, 40, 364–406. [Google Scholar] [CrossRef]
- Foucher, P.-Y.; Déliot, P.; Poutier, L.; Duclaux, O.; Raffort, V.; Roustan, Y. Aerosol Plume Characterisation from Multi-Temporal Hyperspectral Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2018, 12, 6029–6032. [Google Scholar] [CrossRef]
- Poutier, L.; Miesch, C.; Lenot, X.; Achard, V.; Boucher, Y. COMANCHE and COCHISE: Two reciprocal atmospheric codes for hyperspectral remote sensing. 2002 AVIRIS Earth Sci. Appl. Work. Proc. 2002, 889–1059. Available online: https://aviris.jpl.nasa.gov/proceedings/workshops/02_docs/2002_Poutier.pdf (accessed on 15 June 2021).
- Chilton, L.; Walsh, S. Detection of Gaseous Plumes using Basis Vectors. Sensors 2009, 9, 3205–3217. [Google Scholar] [CrossRef] [Green Version]
- Theiler, J.; Foy, B.R.; Fraser, A.M. Nonlinear signal contamination effects for gaseous plume detection in hyperspectral imagery. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XII; SPIE: Bellingham, WA, USA, 2006. [Google Scholar]
- Kumar, S.; Torres, C.; Ulutan, O.; Ayasse, A.; Roberts, D.; Manjunath, B.S. Deep Remote Sensing Methods for Methane Detection in Overhead Hyperspectral Imagery. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Snowmass, CO, USA, 1–5 March 2020; pp. 1776–1785. [Google Scholar]
- Thorpe, A.K.; Frankenberg, C.; Thompson, D.R.; Duren, R.M.; Aubrey, A.D.; Bue, B.D.; Green, R.O.; Gerilowski, K.; Krings, T.; Borchardt, J.; et al. Airborne DOAS retrievals of methane, carbon dioxide, and water vapor concentrations at high spatial resolution: Application to AVIRIS-NG. Atmos. Meas. Tech. 2017, 10, 3833–3850. [Google Scholar] [CrossRef] [Green Version]
- Ayasse, A.K.; Thorpe, A.K.; Roberts, D.A.; Funk, C.C.; Dennison, P.E.; Frankenberg, C.; Steffke, A.; Aubrey, A.D. Evaluating the effects of surface properties on methane retrievals using a synthetic airborne visible/infrared imaging spectrometer next generation (AVIRIS-NG) image. Remote Sens. Environ. 2018, 215, 386–397. [Google Scholar] [CrossRef]
- Berk, A.; Bernstein, L.S.; Robertson, D.C. MODTRAN: A Moderate Resolution Model for LOWTRAN; Defense Technical Information Center: Fort Belvoir, VA, USA, 1987.
- White, W.; Anderson, J.; Blumenthal, D.; Husar, R.; Gillani, N.; Husar, J.; Wilson, W. Formation and transport of secondary air pollutants: Ozone and aerosols in the St. Louis urban plume. Science 1976, 194, 187–189. [Google Scholar] [CrossRef]
- Cusworth, D.H.; Jacob, D.J.; Sheng, J.-X.; Benmergui, J.; Turner, A.J.; Brandman, J.; White, L.; Randles, C.A. Detecting high-emitting methane sources in oil/gas fields using satellite observations. Atmos. Chem. Phys. 2018, 18, 16885–16896. [Google Scholar] [CrossRef] [Green Version]
- Varon, D.J.; Jacob, D.J.; McKeever, J.; Jervis, D.; Durak, B.O.A.; Xia, Y.; Huang, Y. Quantifying methane point sources from fine-scale satellite observations of atmospheric methane plumes. Atmos. Meas. Tech. 2018, 11, 5673–5686. [Google Scholar] [CrossRef] [Green Version]
- Watremez, X.; Doz, S.; Foucher, P.-Y. Methane leak near real time quantification with a hyperspectral infrared camera. In Proceedings of the Thermosense: Thermal Infrared Applications XL; de Vries, J., Burleigh, D., Eds.; SPIE: Bellingham, WA, USA, 2018; Volume 10661, p. 2. [Google Scholar]
- Smith, M.L.; Gvakharia, A.; Kort, E.A.; Sweeney, C.; Conley, S.A.; Faloona, I.; Newberger, T.; Schnell, R.; Schwietzke, S.; Wolter, S. Airborne Quantification of Methane Emissions over the Four Corners Region. Environ. Sci. Technol. 2017, 51, 5832–5837. [Google Scholar] [CrossRef] [PubMed]
- Meerdink, S.K.; Hook, S.J.; Roberts, D.A.; Abbott, E.A. The ECOSTRESS spectral library version 1.0. Remote Sens. Environ. 2019, 230, 111196. [Google Scholar] [CrossRef]
- Baldridge, A.M.; Hook, S.J.; Grove, C.I.; Rivera, G. The ASTER spectral library version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Nesme, N.; Foucher, P.-Y.; Doz, S.; Lezeaux, O.; Camy-Peyret, C. Comparison of Estimation Methods To Quantify Methane Plume Concentration At High Spatial Resolution From Hyperspectral Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2, 411–417. [Google Scholar] [CrossRef]
- Abdel-Rahman, A.A. On the atmospheric dispersion and Gaussian plume model. In Proceedings of the 2nd International Conference on Waste Management, Water Pollution, Air Pollution, Indoor Climate, Corfu, Greece, 26–28 October 2008; pp. 31–39. [Google Scholar]
- Nassar, R.; Hill, T.G.; McLinden, C.A.; Wunch, D.; Jones, D.B.A.; Crisp, D. Quantifying CO2 Emissions From Individual Power Plants From Space. Geophys. Res. Lett. 2017, 44, 10–45. [Google Scholar] [CrossRef] [Green Version]
- Varon, D.J.; Jacob, D.J.; Jervis, D.; McKeever, J. Quantifying Time-Averaged Methane Emissions from Individual Coal Mine Vents with GHGSat-D Satellite Observations. Environ. Sci. Technol. 2020, 54, 10246–10253. [Google Scholar] [CrossRef]
- Thorpe, A.K.; O’Handley, C.; Emmitt, G.D.; DeCola, P.L.; Hopkins, F.M.; Yadav, V.; Guha, A.; Newman, S.; Herner, J.D.; Falk, M.; et al. Improved methane emission estimates using AVIRIS-NG and an Airborne Doppler Wind Lidar. Remote Sens. Environ. 2021, 266, 112681. [Google Scholar] [CrossRef]
- Sherwin, E.D.; Chen, Y.; Ravikumar, A.P.; Brandt, A.R. Single-blind test of airplane-based hyperspectral methane detection via controlled releases. Elem. Sci. Anthr. 2021, 9, 00063. [Google Scholar] [CrossRef]
- Foote, M.D.; Dennison, P.E.; Sullivan, P.R.; O’Neill, K.B.; Thorpe, A.K.; Thompson, D.R.; Cusworth, D.H.; Duren, R.; Joshi, S.C. Impact of scene-specific enhancement spectra on matched filter greenhouse gas retrievals from imaging spectroscopy. Remote Sens. Environ. 2021, 264, 112574. [Google Scholar] [CrossRef]
| Spectral Range (nm) | Requirement [35] | Estimation [55] | |
|---|---|---|---|
| SNR | 1500–1750 | ≥200 | 200–400 |
| 1950–2350 | ≥100 | ≈100 |
| Date | Speed (m·s−1) | Direction (°) |
|---|---|---|
| 2020/04/19 | 2.6 | 251 |
| 2020/06/22 | 8.9 | 281 |
| 2020/07/03 | 5.0 | 129 |
| 2020/07/21 | 3.3 | 137 |
| 2020/08/07 | 4.0 | 331 |
| 2020/10/10 | 7.9 | 88 |
| 2020/11/14 | 1.2 | 147 |
| 2021/02/09 | 2.5 | 67 |
| 2021/03/10 | 1.7 | 377 |
| 2021/04/14 | 4.3 | 111 |
| 2021/06/22 | 2.7 | 148 |
| Date | Source | Concentration Max (ppm·m) |
|---|---|---|
| 2020/04/19 | A | 10,700 |
| 2020/06/22 | A | 4790 |
| 2020/06/22 | D | 4920 |
| 2020/07/03 | A | 10,520 |
| 2020/07/21 | A | 20,010 |
| 2020/08/07 | A | 16,300 |
| 2020/08/07 | C | 6790 |
| 2020/10/10 | D | 14,320 |
| 2020/11/14 | B | 11,940 |
| 2021/02/09 | A | 6570 |
| 2021/03/10 | A | 5470 |
| 2021/04/14 | A | 7470 |
| 2021/06/22 | A | 15,390 |
| Plume | Mask | (g·m−1) | (g·m−1) | (g·m−1) | Total Mass (kg) | Number of Plume Pixels |
|---|---|---|---|---|---|---|
| P1 | Small | 617.0 ± 21.8 | 635.5 ± 23.4 | 1443.0 ± 181.5 | 1258.4 ± 158.3 | 845 |
| P1 | Full | 727.0 ± 36.8 | 746.8 ± 39.9 | 1572.7 ± 455.2 | 3271.3 ± 946.7 | 4807 |
| P2 | Small | 533.1 ± 16.1 | 558.4 ± 17.2 | 1222.2 ± 114.1 | 720.4 ± 67.3 | 386 |
| P2 | Full | 548.4 ± 27.1 | 552.9 ± 28.4 | 1146.2 ± 324.6 | 2106.6 ± 596.5 | 3753 |
| Plume | Mask | (g·m−1) | (g·m−1) | (g·m−1) | Total Mass (kg) | Number of Plume Pixels |
|---|---|---|---|---|---|---|
| P1 | Small | 531.9 | 547.9 | 1244.0 | 1084.8 | 845 |
| P1 | Full | 694.6 | 713.4 | 1512.7 | 3146.4 | 4807 |
| - | - | - | - | - | - | - |
| P2 | Small | 497.7 | 521.4 | 1141.2 | 672.6 | 386 |
| P2 | Full | 525.8 | 530.0 | 1098.8 | 2019.4 | 3753 |
| Plume | Mask | Relat. Dif. CSF (%) | Relat. Diff. RDM (%) | Relat. Diff. IME (%) | Relat. Diff. Total Mass (%) | Relat. Diff. Total Mass Uncertainty with ISBR-OEM (%) |
|---|---|---|---|---|---|---|
| P1 | Small | 16.0 | 16.0 | 16.3 | 16.0 | 12.6 |
| P1 | Full | 4.7 | 4.7 | 4.0 | 4.0 | 24.3 |
| - | - | - | - | - | - | - |
| P2 | Small | 7.1 | 7.1 | 7.1 | 7.1 | 9.3 |
| P2 | Full | 4.3 | 4.3 | 4.3 | 4.3 | 28.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nesme, N.; Marion, R.; Lezeaux, O.; Doz, S.; Camy-Peyret, C.; Foucher, P.-Y. Joint Use of in-Scene Background Radiance Estimation and Optimal Estimation Methods for Quantifying Methane Emissions Using PRISMA Hyperspectral Satellite Data: Application to the Korpezhe Industrial Site. Remote Sens. 2021, 13, 4992. https://doi.org/10.3390/rs13244992
Nesme N, Marion R, Lezeaux O, Doz S, Camy-Peyret C, Foucher P-Y. Joint Use of in-Scene Background Radiance Estimation and Optimal Estimation Methods for Quantifying Methane Emissions Using PRISMA Hyperspectral Satellite Data: Application to the Korpezhe Industrial Site. Remote Sensing. 2021; 13(24):4992. https://doi.org/10.3390/rs13244992
Chicago/Turabian StyleNesme, Nicolas, Rodolphe Marion, Olivier Lezeaux, Stéphanie Doz, Claude Camy-Peyret, and Pierre-Yves Foucher. 2021. "Joint Use of in-Scene Background Radiance Estimation and Optimal Estimation Methods for Quantifying Methane Emissions Using PRISMA Hyperspectral Satellite Data: Application to the Korpezhe Industrial Site" Remote Sensing 13, no. 24: 4992. https://doi.org/10.3390/rs13244992
APA StyleNesme, N., Marion, R., Lezeaux, O., Doz, S., Camy-Peyret, C., & Foucher, P.-Y. (2021). Joint Use of in-Scene Background Radiance Estimation and Optimal Estimation Methods for Quantifying Methane Emissions Using PRISMA Hyperspectral Satellite Data: Application to the Korpezhe Industrial Site. Remote Sensing, 13(24), 4992. https://doi.org/10.3390/rs13244992