
A Residual Attention and Local Context-Aware Network for Road Extraction from High-Resolution Remote Sensing Imagery


Abstract
:1. Introduction
- (1)
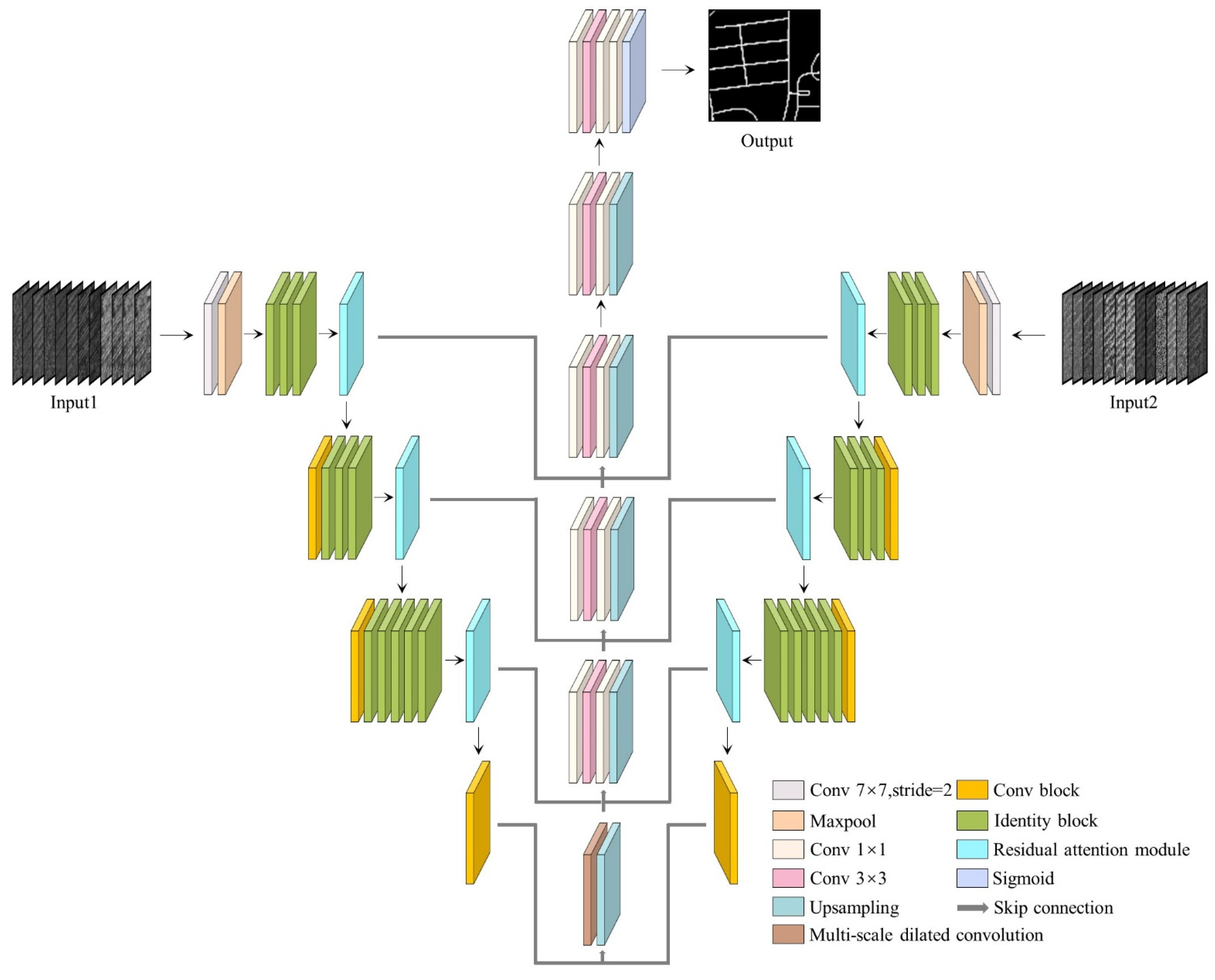
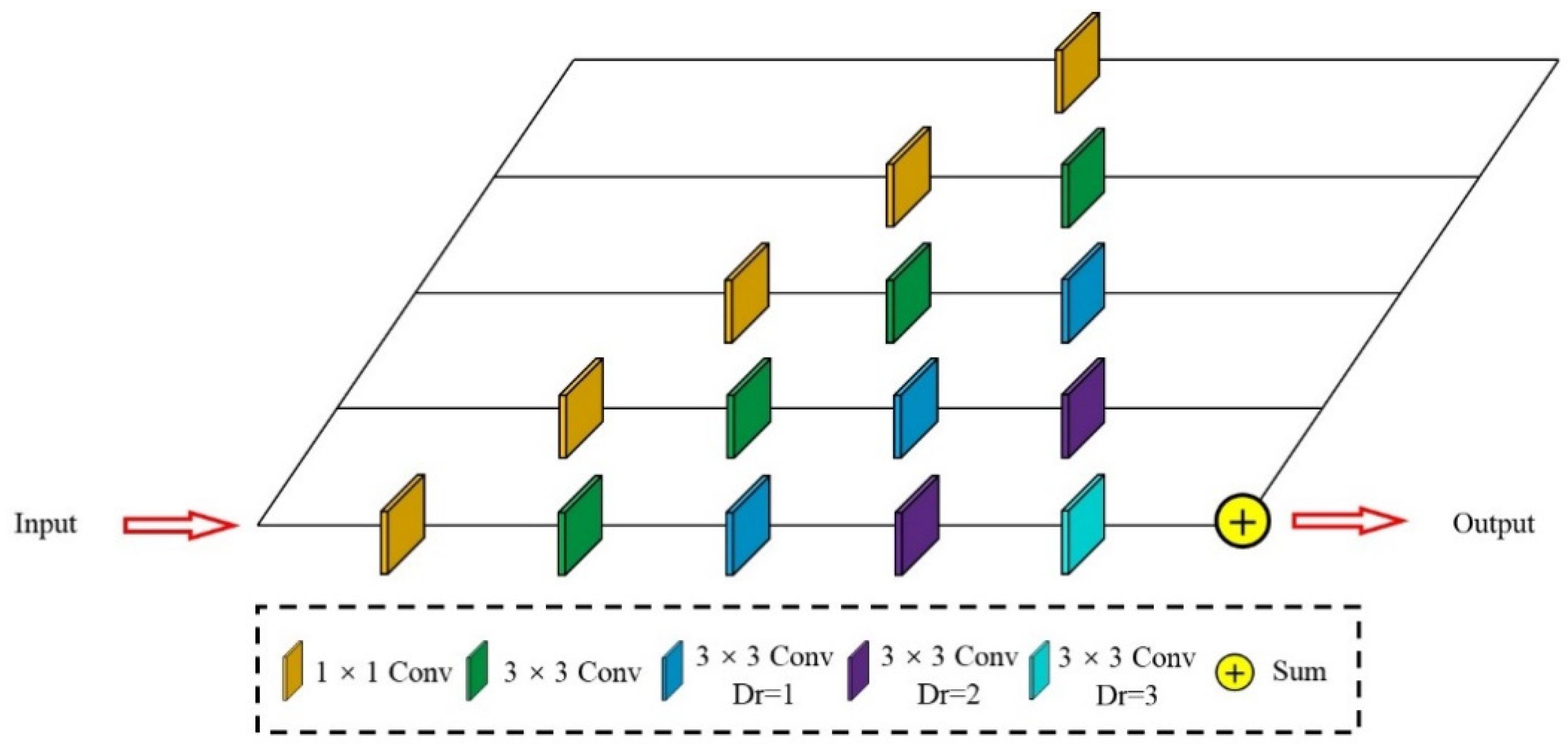
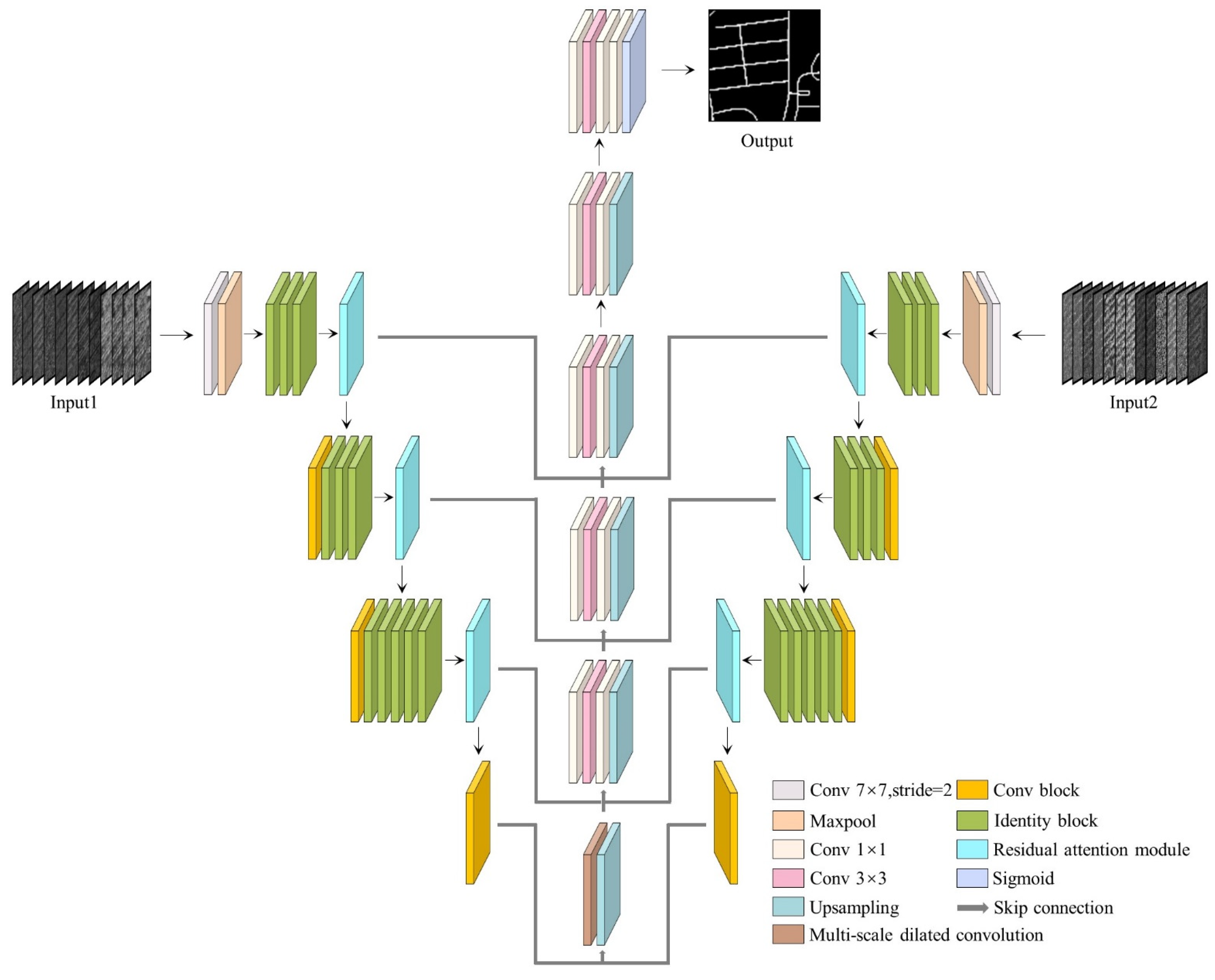
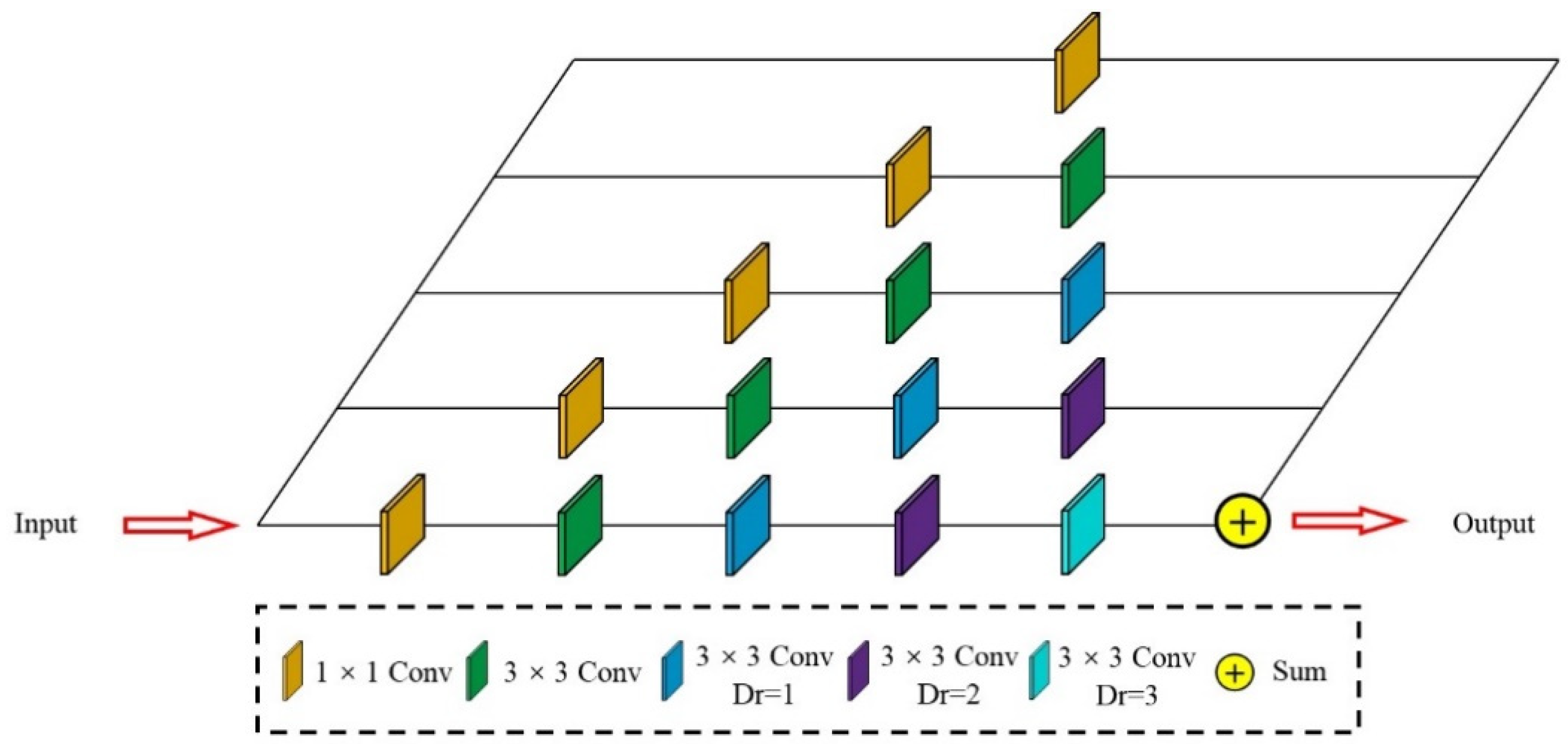
- To extract complete road information from HRI, we designed the RALC-Net model. The proposed network consists of a dual-encoder with the residual attention module, a multi-scale dilated convolution module, and a parallel partial decoder. At the same time, the context information is highlighted by using skip connections between the encoder and decoder. The dual-encoder structure is used to enhance the feature abstraction and fusion capabilities of the network and extract the feature map of the input data. Then the extracted feature map is passed through the multi-scale dilated convolution module to retain the feature information at different spatial scales and obtain high-level semantic information under the multi-scale spatial receptive field, enhancing the network’s feature representation ability. The decoders gradually enlarge the spatial size of the obtained feature map until it is consistent with the input data, and the classifier is ultimately used to make classification decisions;
- (2)
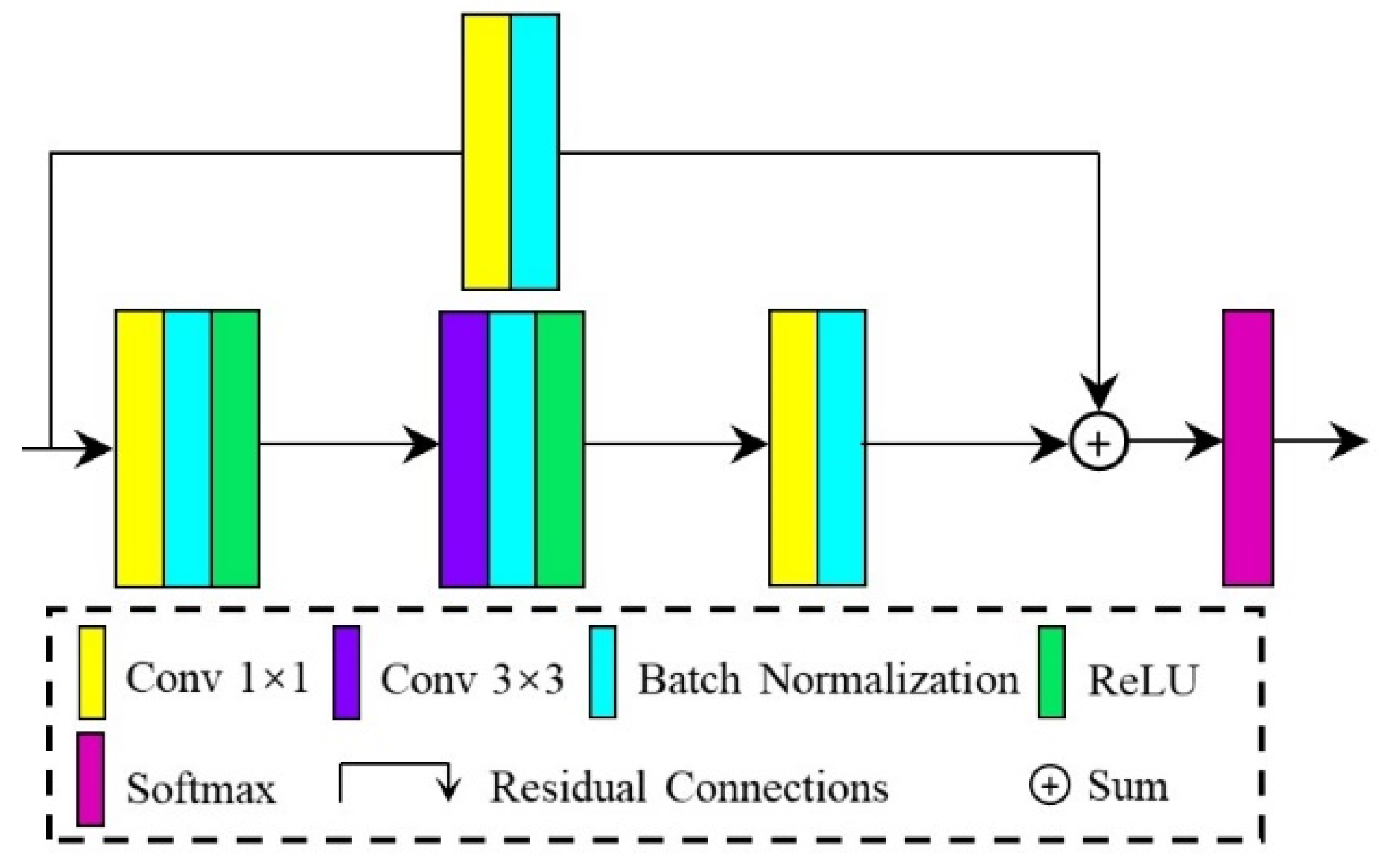
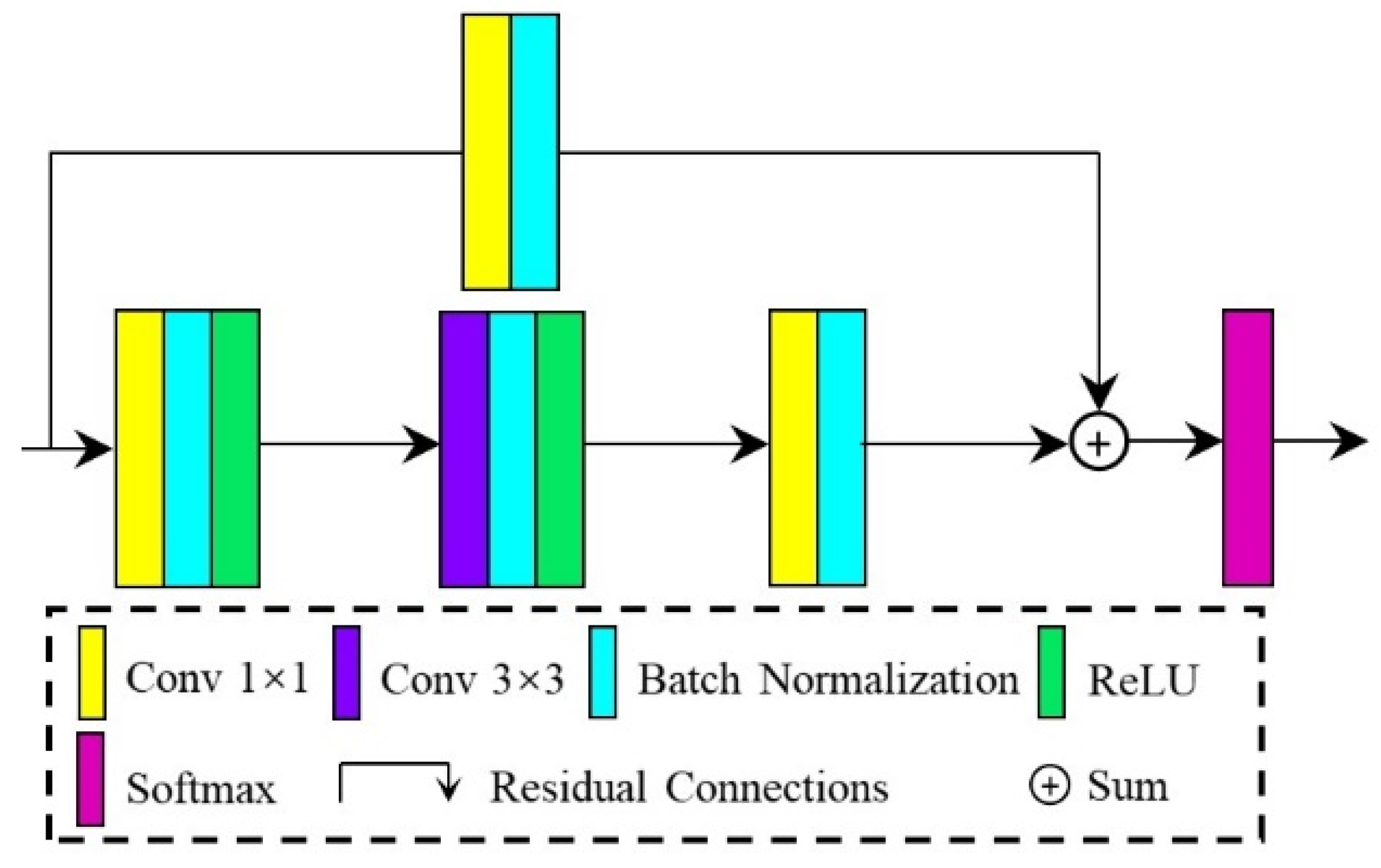
- By introducing residual connection into the attention mechanism, the residual attention module is constructed to emphasize the local semantics and improve the generalization ability of the network model. The residual attention module can retain local detailed semantic information and spatial boundary and use residual mapping to extract and abstract deep feature maps to relieve over-fitting;
- (3)
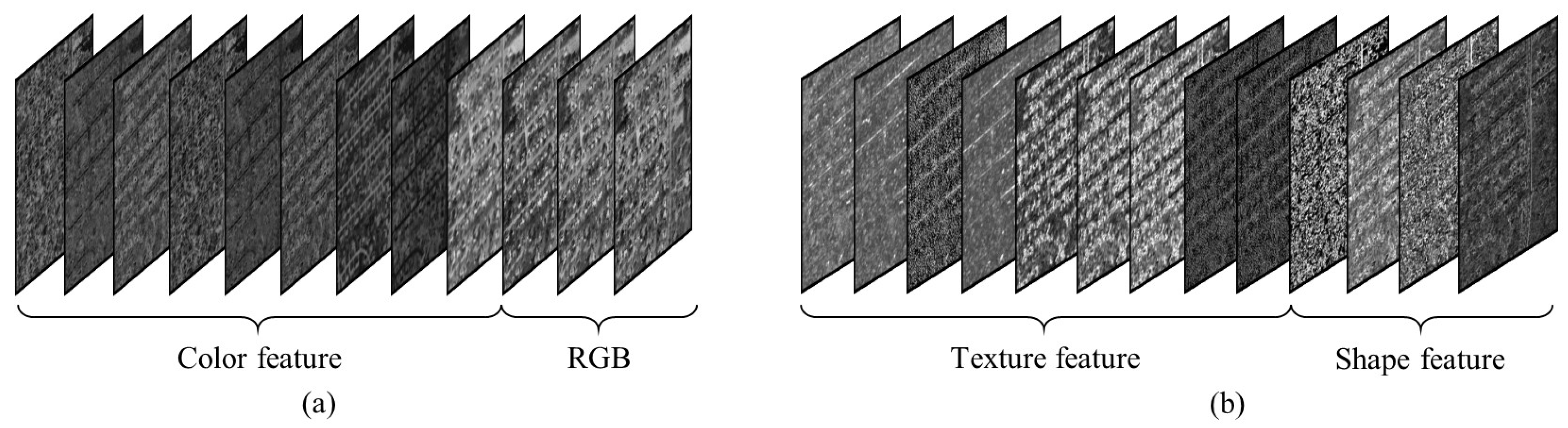
- Multi-feature information is used as the input of the network model to assist the extraction of road information from HRI, which has more abundant spectral and texture information. Color, texture, and shape information extracted from image data can provide the essential decision-making basis for road information extraction. The original image, color feature, texture feature, and shape feature are simultaneously input into the model to extract road information, which improves the generalization ability of the network model and enhances the robustness.
2. Related Work
2.1. Traditional Road Extraction Methods
2.2. Road Extraction Methods Based on Deep Learning
2.3. Attention Mechanisms
3. Methodology
3.1. The Structure of Encoder-Decoder
3.2. Residual Attention Module
3.3. Multi-Scale Dilated Convolution
3.4. Multi-Feature Information
3.4.1. Color Feature
3.4.2. Texture Feature
3.4.3. Shape Feature
4. Experiments
4.1. Dataset
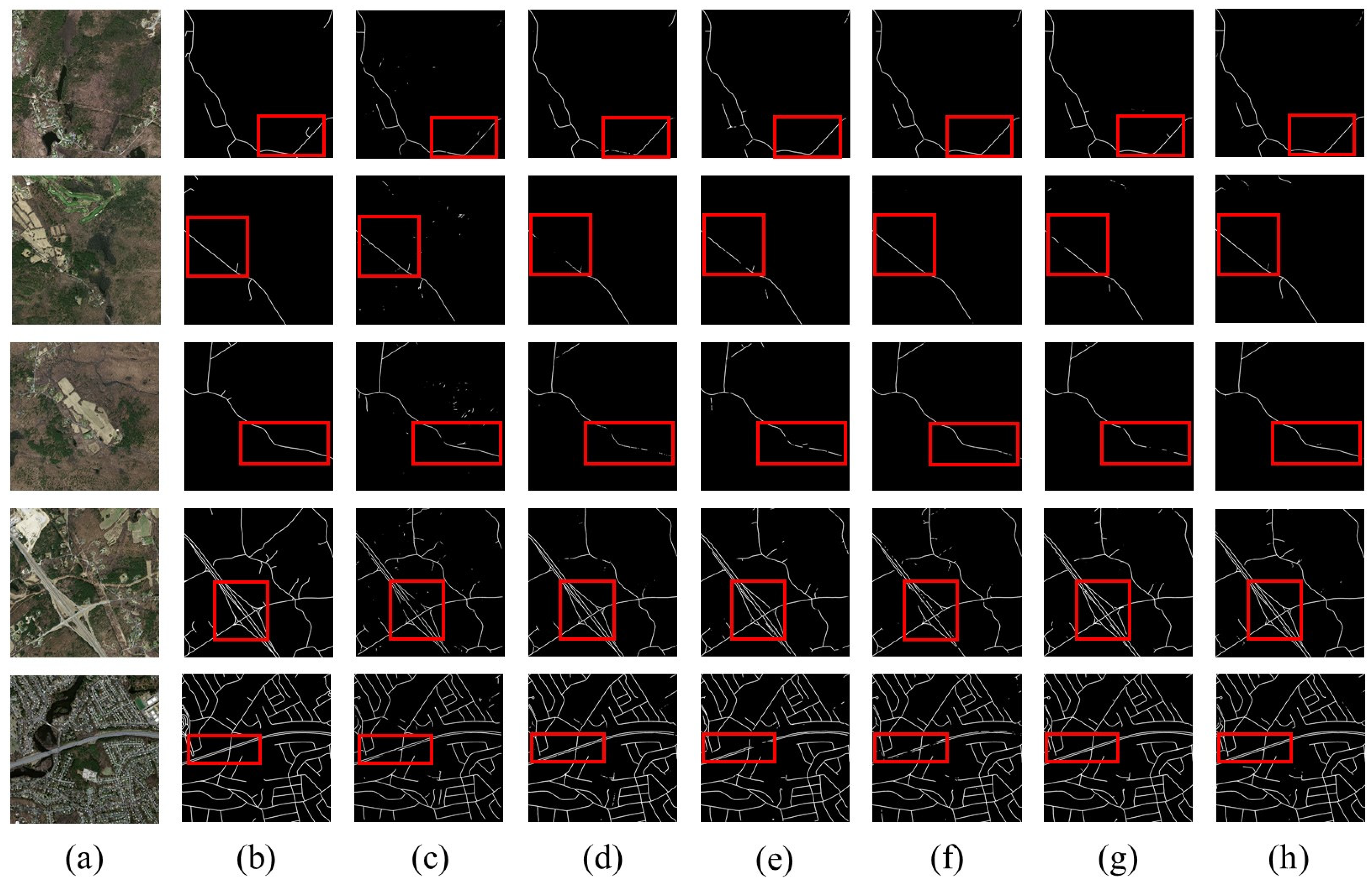
4.1.1. Massachusetts Roads Dataset
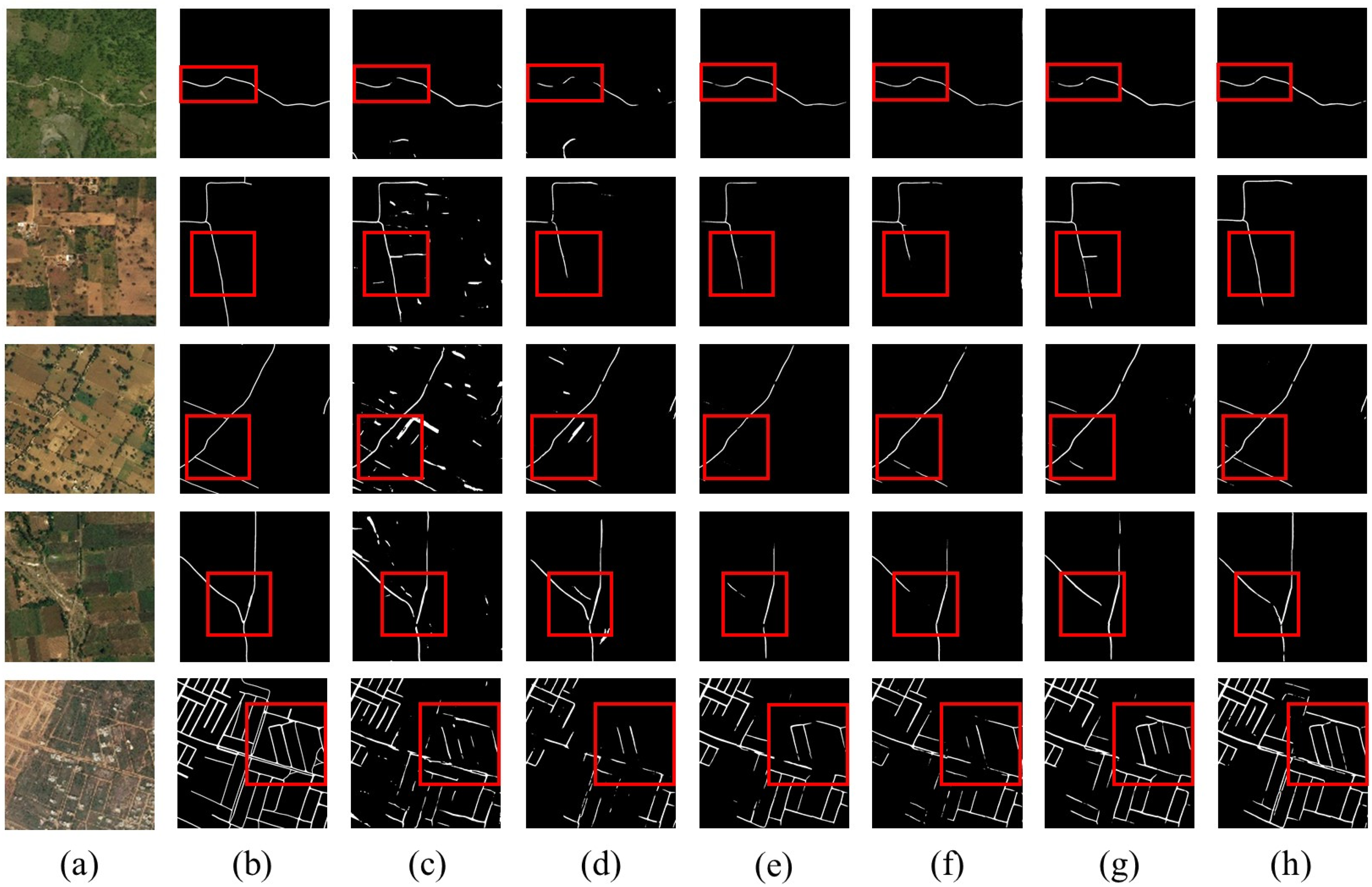
4.1.2. DeepGlobe Roads Dataset
4.2. Evaluation Metrics
4.3. Experimental Results
4.3.1. Ablation Study on the Encoders and the RA Module
4.3.2. Ablation Study on the Components of the Network
4.3.3. Road Extraction Using Multi-Feature Information
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang:, Y.; Newsam, S. Geographic Image Retrieval Using Local Invariant Features. IEEE Trans. Geosci. Remote Sens. 2013, 51, 818–832. [Google Scholar] [CrossRef]
- Weng, Q.H. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Wang, M.C.; Zhang, X.Y.; Niu, X.F.; Wang, F.Y.; Zhang, X.Q. Scene Classification of High-Resolution Remotely Sensed Image Based on ResNet. J. Geovisualization Spat. Anal. 2019, 3, 16. [Google Scholar] [CrossRef]
- Youssef, A.M.; Sefry, S.A.; Pradhan, B.; Alfadail, E.A. Analysis on causes of flash flood in Jeddah city (Kingdom of Saudi Arabia) of 2009 and 2011 using multi-sensor remote sensing data and GIS. Geomat. Nat. Hazards Risk 2015, 7, 1018–1042. [Google Scholar] [CrossRef]
- Ghaffarian, S.; Kerle, N.; Filatova, T. Remote Sensing-Based Proxies for Urban Disaster Risk Management and Resilience: A Review. Remote Sens. 2018, 10, 1760. [Google Scholar] [CrossRef] [Green Version]
- Heiselberg, H.; Stateczny, A. Remote Sensing in Vessel Detection and Navigation. Sensors 2020, 20, 5841. [Google Scholar] [CrossRef]
- Bi, Q.; Qin, K.; Zhang, H.; Zhang, Y.; Li, Z.; Xu, K. A Multi-Scale Filtering Building Index for Building Extraction in Very High-Resolution Satellite Imagery. Remote Sens. 2019, 11, 482. [Google Scholar] [CrossRef] [Green Version]
- Cardim, G.; Silva, E.; Dias, M.; Bravo, I.; Gardel, A. Statistical Evaluation and Analysis of Road Extraction Methodologies Using a Unique Dataset from Remote Sensing. Remote Sens. 2018, 10, 620. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Zhong, Y.; Zheng, Z.; Liu, Y.; Zhao, J.; Ma, A.; Yang, J. Multi-Scale and Multi-Task Deep Learning Framework for Automatic Road Extraction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9362–9377. [Google Scholar] [CrossRef]
- Jia, J.; Sun, H.; Jiang, C.; Karila, K.; Karjalainen, M.; Ahokas, E.; Khoramshahi, E.; Hu, P.; Chen, C.; Xue, T.; et al. Review on Active and Passive Remote Sensing Techniques for Road Extraction. Remote Sens. 2021, 13, 4235. [Google Scholar] [CrossRef]
- Wang, J.; Song, J.; Chen, M.; Yang, Z. Road network extraction: A neural-dynamic framework based on deep learning and a finite state machine. Int. J. Remote Sens. 2015, 36, 3144–3169. [Google Scholar] [CrossRef]
- Zhang, X.; Han, X.; Li, C.; Tang, X.; Zhou, H.; Jiao, L. Aerial Image Road Extraction Based on an Improved Generative Adversarial Network. Remote Sens. 2019, 11, 930. [Google Scholar] [CrossRef] [Green Version]
- Vo, D.M.; Lee, S.-W. Semantic image segmentation using fully convolutional neural networks with multi-scale images and multi-scale dilated convolutions. Multimed. Tools Appl. 2018, 77, 18689–18707. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, H.; Sun, W.; Li, S.; Wang, F.; Yang, G. A Coarse-to-Fine Deep Learning Based Land Use Change Detection Method for High-Resolution Remote Sensing Images. Remote Sens. 2020, 12, 1933. [Google Scholar] [CrossRef]
- Xu, Z.; Shen, Z.; Li, Y.; Xia, L.; Wang, H.; Li, S.; Jiao, S.; Lei, Y. Road Extraction in Mountainous Regions from High-Resolution Images Based on DSDNet and Terrain Optimization. Remote Sens. 2020, 13, 90. [Google Scholar] [CrossRef]
- Xin, J.; Zhang, X.; Zhang, Z.; Fang, W. Road Extraction of High-Resolution Remote Sensing Images Derived from DenseUNet. Remote Sens. 2019, 11, 2499. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Miao, F.; Zhou, K.; Peng, J. HsgNet: A Road Extraction Network Based on Global Perception of High-Order Spatial Information. ISPRS Int. J. Geoinf. 2019, 8, 571. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yao, J.; Lu, X.; Xia, M.; Wang, X.; Liu, Y. RoadNet: Learning to Comprehensively Analyze Road Networks in Complex Urban Scenes From High-Resolution Remotely Sensed Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2043–2056. [Google Scholar] [CrossRef]
- Liu, R.; Miao, Q.; Zhang, Y.; Gong, M.; Xu, P. A Semi-Supervised High-Level Feature Selection Framework for Road Centerline Extraction. IEEE Geosci. Remote Sens. Lett. 2020, 17, 894–898. [Google Scholar] [CrossRef]
- Wang, S.; Mu, X.; Yang, D.; He, H.; Zhao, P. Road Extraction from Remote Sensing Images Using the Inner Convolution Integrated Encoder-Decoder Network and Directional Conditional Random Fields. Remote Sens. 2021, 13, 465. [Google Scholar] [CrossRef]
- Lian, R.; Wang, W.; Mustafa, N.; Huang, L. Road Extraction Methods in High-Resolution Remote Sensing Images: A Comprehensive Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5489–5507. [Google Scholar] [CrossRef]
- Liu, J.; Qin, Q.M.; Li, J.; Li, Y.P. Rural Road Extraction from High-Resolution Remote Sensing Images Based on Geometric Feature Inference. ISPRS Int. J. Geoinf. 2017, 6, 314. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Zhu, F.; Xiang, S.; Pan, C. Road Centerline Extraction via Semisupervised Segmentation and Multidirection Nonmaximum Suppression. IEEE Geosci. Remote Sens. Lett. 2016, 13, 545–549. [Google Scholar] [CrossRef]
- Shi, W.; Miao, Z.; Debayle, J. An Integrated Method for Urban Main-Road Centerline Extraction From Optical Remotely Sensed Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3359–3372. [Google Scholar] [CrossRef]
- Shanmugam, L.; Kaliaperumal, V. Junction-aware water flow approach for urban road network extraction. IET Image Process 2016, 10, 227–234. [Google Scholar] [CrossRef]
- Baatz, M.; Schape, A. Multiresolution Segmentation: An Optimization Approach for High Quality Multi-Scale Image Segmentation. Angew. Geogr. Inf. Sev.-Beitung 2000, 12, 12–23. [Google Scholar]
- Li, M.; Stein, A.; Bijker, W.; Zhan, Q. Region-based urban road extraction from VHR satellite images using Binary Partition Tree. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 217–225. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. Road centreline extraction from high-resolution imagery based on multiscale structural features and support vector machines. Int. J. Remote Sens. 2009, 30, 1977–1987. [Google Scholar] [CrossRef]
- Miao, Z.; Shi, W.; Gamba, P.; Li, Z. An Object-Based Method for Road Network Extraction in VHR Satellite Images. IEEE J.-STARS 2015, 8, 4853–4862. [Google Scholar] [CrossRef]
- Yin, D.; Du, S.; Wang, S.; Guo, Z. A Direction-Guided Ant Colony Optimization Method for Extraction of Urban Road Information From Very-High-Resolution Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4785–4794. [Google Scholar] [CrossRef]
- Basavaraju, A.; Du, J.; Zhou, F.J.; Ji, J. A Machine Learning Approach to Road Surface Anomaly Assessment Using Smartphone Sensors. IEEE Sens. J. 2020, 20, 2635–2647. [Google Scholar] [CrossRef]
- Zhang, Q.; Kong, Q.; Zhang, C.; You, S.; Wei, H.; Sun, R.; Li, L. A new road extraction method using Sentinel-1 SAR images based on the deep fully convolutional neural network. Eur. J. Remote Sens. 2019, 52, 572–582. [Google Scholar] [CrossRef] [Green Version]
- Lv, Y.; Wang, G.F.; Hu, X.Y. Machine Learning Based Road Detection from High Resolution Imagery. In Proceedings of the 23rd Congress of the International-Society-for-Photogrammetry-and-Remote-Sensing (ISPRS), Prague, Czech Republic, 12–19 July 2016; pp. 891–898. [Google Scholar]
- Guo, Q.; Wang, Z. A Self-Supervised Learning Framework for Road Centerline Extraction From High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4451–4461. [Google Scholar] [CrossRef]
- Zhu, D.M.; Wen, X.; Xia, R. Road Extraction Based on the Algorithms of K-Means Clustering and Hybrid Model of SVM and FCM. Adv. Mat. Res. 2012, 518–523, 5738–5743. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, Z.; Wu, L.; Chen, Z. Multilane roads extracted from the OpenStreetMap urban road network using random forests. Trans. GIS. 2018, 23, 224–240. [Google Scholar] [CrossRef]
- Soni, P.K.; Rajpal, N.; Mehta, R. Semiautomatic Road Extraction Framework Based on Shape Features and LS-SVM from High-Resolution Images. J. Indian Soc. Remote Sens. 2020, 48, 513–524. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, L.; Liu, Y.; Zhang, X.L.; Ye, Y.X.; Yin, G.F.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. Deep learning classifiers for hyperspectral imaging: A review. ISPRS J. Photogramm. Remote Sens. 2019, 158, 279–317. [Google Scholar] [CrossRef]
- Senthilnath, J.; Varia, N.; Dokania, A.; Anand, G.; Benediktsson, J.A. Deep TEC: Deep Transfer Learning with Ensemble Classifier for Road Extraction from UAV Imagery. Remote Sens. 2020, 12, 245. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Zhu, F.; Xiang, S.; Wang, Y.; Pan, C. Accurate urban road centerline extraction from VHR imagery via multiscale segmentation and tensor voting. Neurocomputing 2016, 205, 407–420. [Google Scholar] [CrossRef] [Green Version]
- Buslaev, A.; Seferbekov, S.; Iglovikov, V.; Shvets, A. Fully Convolutional Network for Automatic Road Extraction from Satellite Imagery. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 197–1973. [Google Scholar]
- Li, P.; Zang, Y.; Wang, C.; Li, J.; Cheng, M.; Luo, L. Road network extraction via deep learning and line integral convolution. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1599–1602. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1337–1342. [Google Scholar]
- Zhou, M.; Sui, H.; Chen, S.; Wang, J.; Chen, X. BT-RoadNet: A boundary and topologically-aware neural network for road extraction from high-resolution remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2020, 168, 288–306. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, Y.; Xu, S.; Wang, H.; Xiang, S.; Pan, C. Automatic Road Detection and Centerline Extraction via Cascaded End-to-End Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3322–3337. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Q.; Wang, Y. Road Extraction by Deep Residual U-Net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar] [CrossRef] [Green Version]
- Abdollahi, A.; Pradhan, B.; Sharma, G.; Maulud, K.N.A.; Alamri, A. Improving Road Semantic Segmentation Using Generative Adversarial Network. IEEE Access 2021, 9, 64381–64392. [Google Scholar] [CrossRef]
- Wei, X.; Fu, X.; Yun, Y.; Lv, X. Multiscale and Multitemporal Road Detection from High Resolution SAR Images Using Attention Mechanism. Remote Sens. 2021, 13, 3149. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, X.; Zhang, Y. HA-Net: A Lake Water Body Extraction Network Based on Hybrid-Scale Attention and Transfer Learning. Remote Sens. 2021, 13, 4121. [Google Scholar] [CrossRef]
- Zhang, H.M.; Wang, M.C.; Wang, F.Y.; Yang, G.D.; Zhang, Y.; Jia, J.Q.; Wang, S.Q. A Novel Squeeze-and-Excitation W-Net for 2D and 3D Building Change Detection with Multi-Source and Multi-Feature Remote Sensing Data. Remote Sens. 2021, 13, 440. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Xie, Z.; Feng, Y.X.; Chen, Z.L. Road Extraction from High-Resolution Remote Sensing Imagery Using Deep Learning. Remote Sens. 2018, 10, 1461. [Google Scholar] [CrossRef] [Green Version]
- Wan, J.; Xie, Z.; Xu, Y.; Chen, S.; Qiu, Q. DA-RoadNet: A Dual-Attention Network for Road Extraction From High Resolution Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6302–6315. [Google Scholar] [CrossRef]
- Ren, Y.; Yu, Y.; Guan, H. DA-CapsUNet: A Dual-Attention Capsule U-Net for Road Extraction from Remote Sensing Imagery. Remote Sens. 2020, 12, 2866. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q. Understanding and improving deep learning-based rolling bearing fault diagnosis with attention mechanism. Signal. Process. 2019, 161, 136–154. [Google Scholar] [CrossRef]
- Tan, Z.; Su, J.; Wang, B.; Chen, Y.; Shi, X. Lattice-to-sequence attentional Neural Machine Translation models. Neurocomputing 2018, 284, 138–147. [Google Scholar] [CrossRef]
- Zhang, X.M.; He, G.J.; Zhang, Z.M.; Peng, Y.; Long, T.F. Spectral-spatial multi-feature classification of remote sensing big data based on a random forest classifier for land cover mapping. Clust. Comput. 2017, 20, 2311–2321. [Google Scholar] [CrossRef]
- Mishra, V.N.; Prasad, R.; Rai, P.K.; Vishwakarma, A.K.; Arora, A. Performance evaluation of textural features in improving land use/land cover classification accuracy of heterogeneous landscape using multi-sensor remote sensing data. Earth Sci. Inform. 2018, 12, 71–86. [Google Scholar] [CrossRef]
- Mnih, V. Machine Learning for Aerial Image Labeling; University of Toronto: Toronto, TO, Canada, 2013. [Google Scholar]
- Demir, I.; Koperski, K.; Lindenbaum, D.; Pang, G.; Huang, J.; Basu, S.; Hughes, F.; Tuia, D.; Raskar, R. DeepGlobe 2018: A Challenge to Parse the Earth through Satellite Images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 172–181. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, C.; Wu, M. D-LinkNet: LinkNet with Pretrained Encoder and Dilated Convolution for High Resolution Satellite Imagery Road Extraction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 192–196. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encoder model | mIOU | F1 | Kappa |
|---|---|---|---|
| VGG16 | 0.5325 | 0.6949 | 0.6824 |
| Res34 | 0.5497 | 0.7094 | 0.6967 |
| Res50 | 0.5563 | 0.7149 | 0.7023 |
| VGG16 + RA module | 0.5708 | 0.7268 | 0.7153 |
| Res34 + RA module | 0.5605 | 0.7184 | 0.7066 |
| Res50 + RA module | 0.5834 | 0.7369 | 0.7255 |
| Encoder Model | mIOU | F1 | Kappa |
|---|---|---|---|
| VGG16 | 0.5042 | 0.6703 | 0.6554 |
| Res34 | 0.5094 | 0.6750 | 0.6638 |
| Res50 | 0.5280 | 0.6911 | 0.6793 |
| VGG16 + RA module | 0.5558 | 0.7145 | 0.7031 |
| Res34 + RA module | 0.5351 | 0.6972 | 0.6857 |
| Res50 + RA module | 0.5643 | 0.7214 | 0.7107 |
| Baseline | RA | MD | MF | mIOU | F1 | Kappa | |
|---|---|---|---|---|---|---|---|
| 1 | √ | 0.5563 | 0.7149 | 0.7023 | |||
| 2 | √ | √ | 0.5834 | 0.7369 | 0.7255 | ||
| 3 | √ | √ | √ | 0.5872 | 0.7399 | 0.7285 | |
| 4 | √ | √ | √ | 0.5917 | 0.7435 | 0.7322 | |
| 5 | √ | √ | √ | √ | 0.5961 | 0.7470 | 0.7358 |
| Method | mIOU | F1 | Kappa | |
|---|---|---|---|---|
| part one | SegNet | 0.5477 | 0.7077 | 0.6957 |
| U-Net | 0.5694 | 0.7256 | 0.7140 | |
| DeeplabV3+ | 0.5439 | 0.7045 | 0.6917 | |
| D-LinkNet | 0.5765 | 0.7313 | 0.7196 | |
| RALC-Net | 0.5917 | 0.7435 | 0.7322 | |
| part two | SegNet using Multi-feature | 0.5755 | 0.7305 | 0.7188 |
| U-Net using Multi-feature | 0.5800 | 0.7342 | 0.7228 | |
| DeeplabV3+ using Multi-feature | 0.5632 | 0.7205 | 0.7080 | |
| D-LinkNet using Multi-feature | 0.5813 | 0.7352 | 0.7239 | |
| RALC-Net using Multi-feature | 0.5961 | 0.7470 | 0.7358 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Wang, M.; Wang, F.; Ji, X. A Residual Attention and Local Context-Aware Network for Road Extraction from High-Resolution Remote Sensing Imagery. Remote Sens. 2021, 13, 4958. https://doi.org/10.3390/rs13244958
Liu Z, Wang M, Wang F, Ji X. A Residual Attention and Local Context-Aware Network for Road Extraction from High-Resolution Remote Sensing Imagery. Remote Sensing. 2021; 13(24):4958. https://doi.org/10.3390/rs13244958
Chicago/Turabian StyleLiu, Ziwei, Mingchang Wang, Fengyan Wang, and Xue Ji. 2021. "A Residual Attention and Local Context-Aware Network for Road Extraction from High-Resolution Remote Sensing Imagery" Remote Sensing 13, no. 24: 4958. https://doi.org/10.3390/rs13244958
APA StyleLiu, Z., Wang, M., Wang, F., & Ji, X. (2021). A Residual Attention and Local Context-Aware Network for Road Extraction from High-Resolution Remote Sensing Imagery. Remote Sensing, 13(24), 4958. https://doi.org/10.3390/rs13244958