1. Introduction
Interferometric synthetic aperture radar (InSAR) is a modern technique that has been utilized to identify displacement [
1,
2], volcano activity, etc. [
3,
4]. However, measurements from InSAR are usually influenced by the phase delay in the atmosphere, which could reduce the accuracy of subsidence information. A change in humidity of around 20 percent can exist in some extreme cases. Such a change can severely influence the accuracy of the InSAR technique and can even result in errors of up to 10 cm when measuring displacement [
5]. Therefore, when we require a high level of accuracy under some specific circumstances, it is necessary to mitigate the undesirable atmospheric effects.
Atmospheric delay consists of two major components: the ionospheric effect and the tropospheric effect [
6]. The ionospheric delay is dispersive [
7], meaning that it is inversely proportional to the signal frequency. Longer wavelength signals, especially P-band and L-band signals, are impacted severely by the ionosphere. Many mature methods are used in InSAR processing to remove the ionospheric influence. The most widely used approach is the split-spectrum method. After splitting the range spectrum, the original interferometry image can be divided into two sub-images with different frequencies. Then, the ionospheric delay can be calculated.
For satellites with shorter wavelengths (e.g., Envisat and Sentinel-1A), the ionospheric impact is often neglected or estimated by external data [
8]. The tropospheric effect has been more widely taken into account for accurate displacement monitoring. Tropospheric delay [
9] is influenced by variations in temperature, pressure, and water vapor over time and in space. Many studies have focused on different methodologies to mitigate tropospheric delay. One method relies on the correlation between the delay and topographic elevation [
10,
11]. Unfortunately, if the phase of subsidence is similar to the atmospheric delay, the deformation and atmospheric contribution become more indistinguishable. Another approach [
12,
13] uses auxiliary datasets such as from the Medium-Resolution Imaging Spectrometer (MERIS) [
14] and from the Moderate-Resolution Imaging Spectroradiometer (MODIS) [
15]. However, this method is limited in several aspects: both MERIS and MODIS data have limitations in spatial coverage on cloudy days; the individual MODIS sensors have a large temporal gap when obtaining observational data, which means poor time resolution; and MERIS stopped working in 2012. By integrating the water vapor content from the sensor to the ground, global positioning system (GPS) data have also been successfully taken advantage of to mitigate atmospheric delay. However, GPS has a sparse spatial distribution, and this method needs spatial interpolation.
Recent studies have focused on the weather-based methods [
12] which are more feasible and have more potential. These methods rely on weather parameters (e.g., pressure, temperature, and relative humidity) derived from meteorological reanalysis datasets, such as ERA-Interim [
16,
17] and ERA5 [
18] obtained from the European Center for Medium Range Weather Forecasts (ECMWF); or the forecasting products of numerical weather prediction (NWP) models, such as the Fifth-Generation Penn State/National Center for Atmospheric Research (NCAR) Mesoscale Model (MM5) [
13], the mesoscale analysis model [
19,
20] from the Japanese Meteorologic Agency (MANAL), and the weather research and forecasting (WRF) model [
21,
22,
23,
24]. NWP models can integrate the water vapor content at the same moment as synthetic aperture radar (SAR) acquisitions, regardless of the presence of clouds.
However, the accuracy of the prediction can be influenced by the input data and the model itself [
25]. The ensemble technique is considered a promising approach for obtaining better predictions. Previous studies have generated ensembles through variations in the initial states, which were later found to be insufficient for representing forecast uncertainties. In addition, the model uncertainty has been taken into consideration and efforts have been made to reasonably reduce the model errors [
26,
27] in recent years. Some researchers use a multi-model ensemble method and take the overall uncertainty from different models into consideration, or use a multi-physics scheme in a single model. Other ensemble approaches have focused on stochastic physics parameterization, introducing perturbations into the equations of the NWP models. Some researchers have made efforts to take advantage of the stochastic total tendency perturbation (STTP) scheme, which represents the uncertainty concerning both the physics and the dynamics in a single model. Some studies have utilized the scheme of stochastic physic perturbation tendency (SPPT), where the uncertainty is related to the total model physical process [
28]. In addition, another approach has been used to present the uncertainty in the stochastic kinetic energy backscatter (SKEB) scheme [
29]. Random patterns are added to the forecast model to perturb the wind component and potential temperature. By considering the different sources of uncertainties and errors, the ensemble mean could outperform deterministic forecasts [
30].
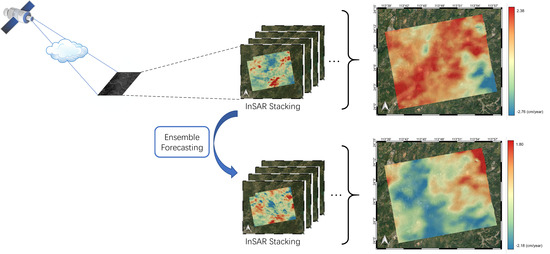
In this study, we took advantage of the ensemble forecasting method to enhance the performance of atmospheric mitigation for the InSAR technique. The experimental area is located in Foshan, Guangdong Province, in the southeast of China. InSAR images were computed through data from the Sentinel-1A satellite. We chose the WRF model as the base model for integration. The SPPT scheme was added to the WRF model to perturb the total parameterization tendency of the physics packages for the wind, potential temperature, and relative humidity. The water vapor content was then integrated at the SAR acquisition time to correct the respective InSAR images. Finally, the atmospherically corrected phases were employed in InSAR stacking to obtain the linear deformation rate of this area.
This manuscript is organized as follows: the background is introduced in
Section 1;
Section 2 describes the experimental dataset and the WRF-SPPT ensemble method;
Section 3 shows the mitigation results achieved in the process of stacking;
Section 4 analyzes and discusses the corrected results; and the conclusions are presented in
Section 5. Finally, the
Appendix A shows a comparison between different WRF-related methods considering the uncertainties in the analysis and forecasting products used in the initial state.
5. Conclusions
This paper proposes the use of the SPPT scheme based on ensemble forecasting with a physical tendency to correct for atmospheric effects in interferogram stacking. According to the results of the experiments with the WRF model, the vertical ZHD and IWV on different acquisition dates were firstly calculated based on the ensemble mean. Then, the results were transformed into total slant delay based on the different incidence angles of each pixel. Lastly, the atmospheric delay phases were utilized in the stacking process to calculate the deformation rate.
To present the impact of WRF-SPPT, we calculated the deformation rate using the method of SBAS with more SAR images and assumed it to be the reference subsidence in this period. Then, we estimated the deviation of the stacking results with the original interferograms, the WRF-only corrected phase, and the WRF-SPPT scheme-corrected phase, respectively. The values of the RMSE indicate that the WRF-SPPT ensemble forecasting method can significantly reduce the atmospheric impact on the surface subsidence obtained from stacking. The results show that the WRF-SPPT scheme mitigates atmospheric effects better than a single WRF simulation in InSAR stacking. Compared with the conventional height-related and WRF-only methods in DInSAR, the WRF-SPPT ensemble forecasting method also has better correction effects. Moreover, regarding the discussion on perturbations in the initial state and uncertainties in the parameterized physics tendencies, the impacts of model errors are more severe when mitigating the atmospheric effects with the numerical weather prediction model.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














