1. Introduction
The Galileo High Accuracy Service (HAS) is currently undergoing its testing and validation phase [
1], which aims at validating the system dissemination capabilities and carrying out an initial performance analysis. The Galileo HAS will freely distribute Precise Point Positioning (PPP) corrections through the Galileo E6B signal [
2] allowing decimeter- level positioning accuracy. Specifically, during the first phase of the service precise orbits, clock, and biases corrections will be broadcast for both GPS and Galileo constellations.
In the second phase, precise ionospheric corrections will also be transmitted to further enhance the target performance of the service.
The Galileo HAS has adopted a Reed–Solomon-based encoding system [
3] to effectively encode and disseminate PPP corrections. The original HAS message is divided into
K pages that are encoded into a redundant set of
N pages and the encoding process is performed using standard approaches based on the properties of Reed–Solomon codes [
4,
5]. Different subsets of the
N encoded pages are distributed by different satellites, optimizing the dissemination capabilities of the system and ensuring a high level of redundancy [
6]. A receiver will be able to recover the original message by collecting any subset of unique
K encoded pages; this property is ensured by the Reed–Solomon encoding scheme [
4,
5], which has been designed to minimize the Time-to-Retrieve Data (TTRD), i.e., the time needed by a receiver to recover the HAS message [
3].
The performance in terms of TTRD was analyzed in [
7,
8] considering highway and suburban environments. From those analyses, it emerged that the final receiver performance depends on the reception environment and on the ability of the receiver to correctly decode the E6B navigation message. The analyses showed that the HAS dissemination scheme is effective in coping with channel erasures and that the HAS message can be recovered with a high probability within 30 s. The analyses were, however, limited to two scenarios (highway and suburban environment) and data were collected at mid-latitudes. Finally, less than eight hours of data were considered for the analyses.
Additional field tests on the Galileo HAS were performed, and considered open-sky, urban and suburban scenarios. Moreover, in this case, which is described in [
9], only mid-latitude conditions and relatively short datasets were considered.
The goal of this study was to extend previous analyses by assessing the demodulation performance of the Galileo E6B signal. The focus of this work is on high-latitude conditions where satellite visibility may be partially reduced [
10]. A professional Septentrio PolaRx5S was installed on a Hurtigruten vessel operating in the Norwegian Sea and reaching latitudes exceeding 71 degrees North. At these latitudes, the Position Dilution Of Precision (PDOP) can be reduced, as discussed in [
10,
11]. Moreover, adverse ionospheric conditions [
12,
13,
14] can further degrade receiver performance, reducing demodulation capabilities. Challenges of GNSS-based navigation at high latitude are also discussed in [
15], where a survey of navigation limits in the Arctic region is presented. Augmentation system coverage and control station distribution are two limiting factors for the accuracy of GNSS-based navigation at high latitudes [
16,
17]. Finally, Galileo opportunities and challenges for Arctic navigation are summarized in [
18].
Three months of continuous data were collected from the Galileo E6B signal and used to generate summary statistics, such as the average TTRD. The unique experimental setup and the long duration of the experiment allow the reliable characterization of the HAS performance under challenging conditions.
The Septentrio PolaRx5S was used to collect the E6B raw bits and provide information on the different decoding operations performed for the recovery of the HAS message. Different metrics were then computed from the E6B raw bits and the other measurements provided by the Septentrio receiver. It is worth underlining that, during the data collection, only dummy messages were broadcast. These messages, which have a predefined format [
19], do not contain real information but can be used for assessing demodulation performance.
Statistics on the TTRD were derived using the methodology developed in [
7,
8]. Average daily statistics were computed for three months of data and the TTRD was evaluated considering a variable number of Galileo-connected satellites, that are satellites actually broadcasting HAS corrections. The results are consistent over the observation period, having a daily Page Error Rate (PER) always below one percent and mean TTRD values below ten seconds when more than three satellites are connected. Moreover, the paper findings agree with the preliminary results presented in a previous conference paper [
20].
This paper is an extended version of [
20], which examined only one week of data. In this work, three months of continuous observations were analyzed. During the three-month period, the vessel reached higher latitudes than those analyzed in [
20]. Moreover, the analysis of such a long period allowed the estimation of additional metrics so as to provide a more complete performance assessment of the E6B demodulation performance at high latitudes. It is worth underlining that a very long test on a ship at high latitudes is a unique experiment, particularly for the Galileo E6B signal, and has been rarely considered in the literature.
This paper is organized as follows:
Section 2 introduces the Galileo E6B signal format, the different coding and dissemination layers introduced by the Galileo HAS, and the demodulation performance metrics. The experimental setup is detailed in
Section 3, and experimental results are provided in
Section 4. Finally,
Section 5 concludes the paper.
2. HAS Message Format and Decoding Performance Metrics
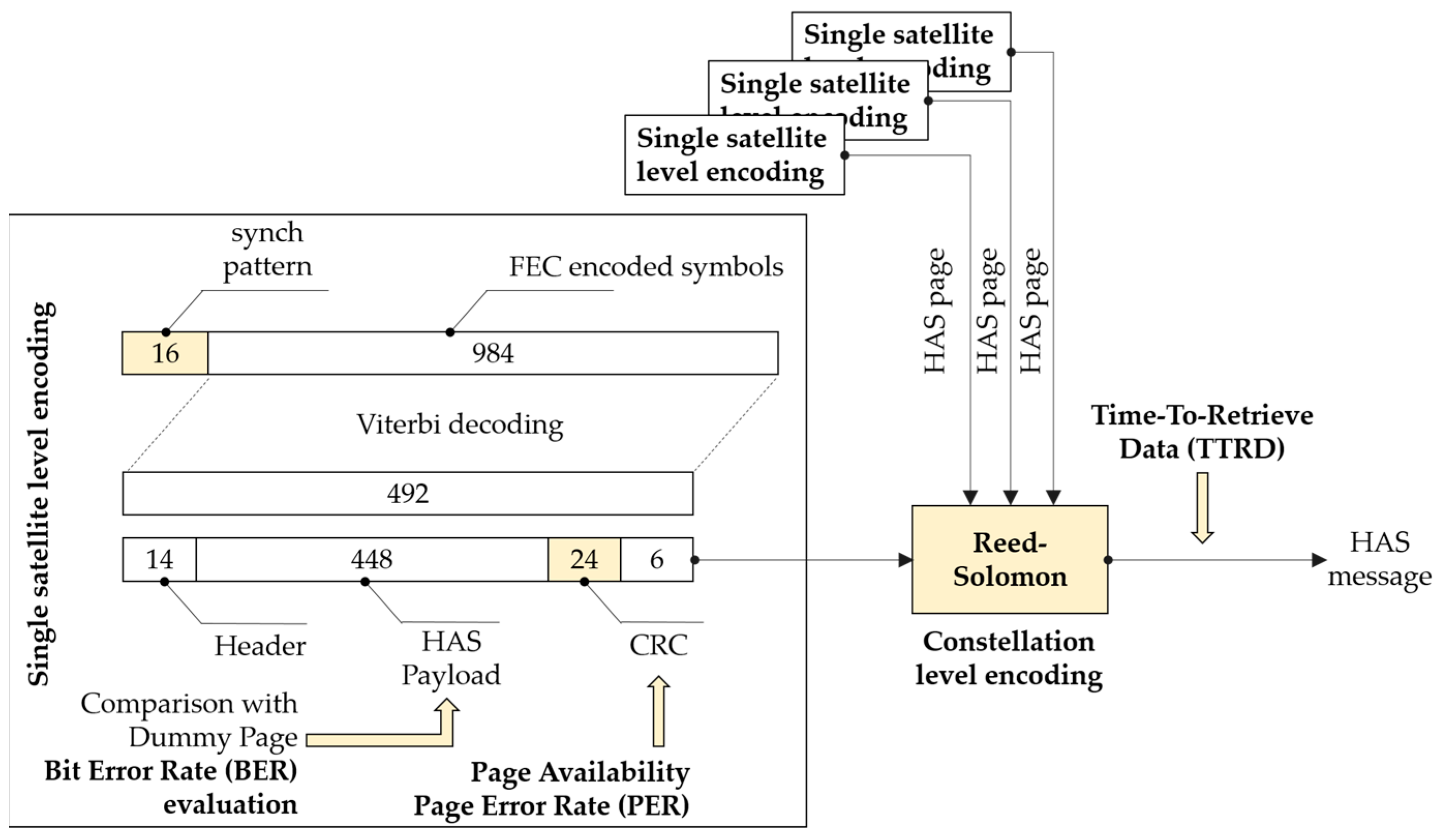
The transmission of the HAS message features several layers of encoding that are implemented at both single signal and constellation levels. A summary of the different levels of encoding is provided in
Figure 1 [
21].
Each E6B page lasts one second and is made of 1000 symbols with a 1 ksymbol/s data rate. The first 16 symbols of each page are not encoded and form the preamble used for page synchronization purposes. The remaining 984 symbols are Forward Error Correction (FEC) encoded with a convolutional code with rate 1/2. This type of encoding provides a first layer of protection against transmission errors which can be corrected using a Viterbi decoder. In the context of this paper, soft-decoding [
4] is considered. In more detail, the navigation message is extracted from the prompt correlators that are obtained by integrating the received signal over 1 ms. Each E6B symbol is thus extracted from one correlator output. When hard-decoding is applied, a first decision (hard decision) is made and a binary value is extracted from the sign of each correlator output. These binary values are passed to the Viterbi decoder, which operates on hard values. In soft-decoding, the raw correlator outputs (soft values) are passed to the Viterbi decoder, which can achieve better performance.
After Viterbi decoding, a set of 492 bits is found. The first 14 bits of the decoded message represent the E6B header. This field is currently reserved and can be used, for example, to discriminate valid pages from dummy messages. The subsequent 448 bits are the actual HAS page, which is then followed by the CRC (24 bits) and the tail (6 bits) used for completing the decoding the convolutionally encoded symbols.
During the three months of data collection considered in this work, dummy E6B pages were broadcast. For this reason, the content of the transmitted pages was known at the receiver side; this fact was exploited to estimate the BER. The BER estimated using real E6B data was then compared to the theoretical one. It was expected that the E6B data is obtained using soft-decoding and in the presence of Gaussian noise.
The 24 bits of the CRC was used to detect if a page, after Viterbi decoding, was received without errors; only pages passing the CRC was used for recovering the final HAS message. In this paper, the CRC was used to evaluate the HAS page availability during the vessel trajectory. Specifically, the PER was computed as the ratio between the number of pages with passed CRC and the total number of received pages.
Viterbi decoding and CRC verification are applied to each satellite signal individually, and are part of the single satellite level protection implemented to deliver correct HAS pages.
This level of protection is complemented by a second layer implemented at the constellation level: each Galileo satellite transmits a different subset of HAS pages encoded using a Reed–Solomon approach [
3,
21]. This approach allows one to reconstruct the original message with any subset of received pages of sufficient size. This mechanism is better detailed in [
3] and allows the generation of a redundant set of
N pages from an original message of
K unencoded pages. Any subset of
K different pages out of the
N broadcast pages enables the reconstruction of the original HAS message. This property, along with an efficient page allocation scheme between the different satellites [
6], allows a fast reconstruction of the HAS message.
The TTRD, which is the time required to reconstruct the original HAS message, is an indicator of the capacity to timely provide high accuracy positioning. This metric was evaluated using the methodology discussed in [
7,
8] where real data were used to simulate realistic transmission conditions. Moreover, the TTRD was determined adopting the dissemination scheme described in [
7]. In particular, it was assumed that Galileo HAS will broadcast two types of message, denoted as:
MT1 Full Corrections (MT1FC): including satellite masks, orbit and clock corrections, and code and phase biases [
3,
6],
MT1 Clock Correction Subset (MT1CCS): including a subset of clock corrections [
3,
6].
The code “MT1” indicates “Message Type 1”, which is the only message type currently defined. It has a flexible structure and supports several configurations. A MT1FC message provides a full set of corrections and it is updated every 120 s. It comprises
pages and is broadcast in blocks of eight consecutive epochs. The MT1CCS message comprises
pages and is broadcast in blocks of two consecutive epochs following the transmission of the MT1FC message. Clock corrections are updated every ten seconds. These parameters imply that page dissemination is performed as follows: for eight consecutive seconds all satellites transmit HAS corrections as MT1FC pages; after that, MT1CCS corrections are broadcast for two seconds. This ten second pattern is repeated indefinitely with an update of the clock corrections each ten seconds. After 120 s, the MT1FC message is also updated. Additional details on the dissemination pattern adopted here can be found in [
3,
7].
The TTRD is evaluated as the time required to recover a MT1FC and a MT1CCS message, and taking into account possible resets in the Reed–Solomon decoding process due to the update of the corrections. The final parameters of the HAS transmission scheme are not defined yet and experimentation is ongoing to determine the settings that maximize the dissemination performance. Thus, the parameters adopted for the analysis and described above may be different from those that will be finally adopted for the Galileo HAS. Despite this fact, the parameters adopted are considered to be representative of the future HAS service and no significant deviations are expected.
3. Data and Setup
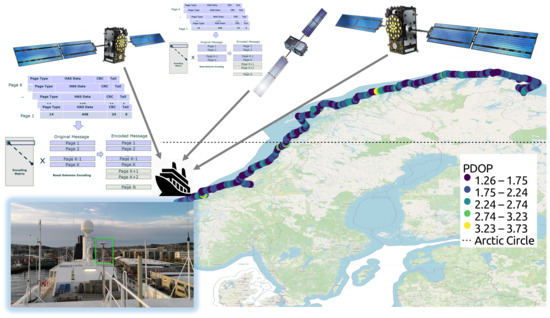
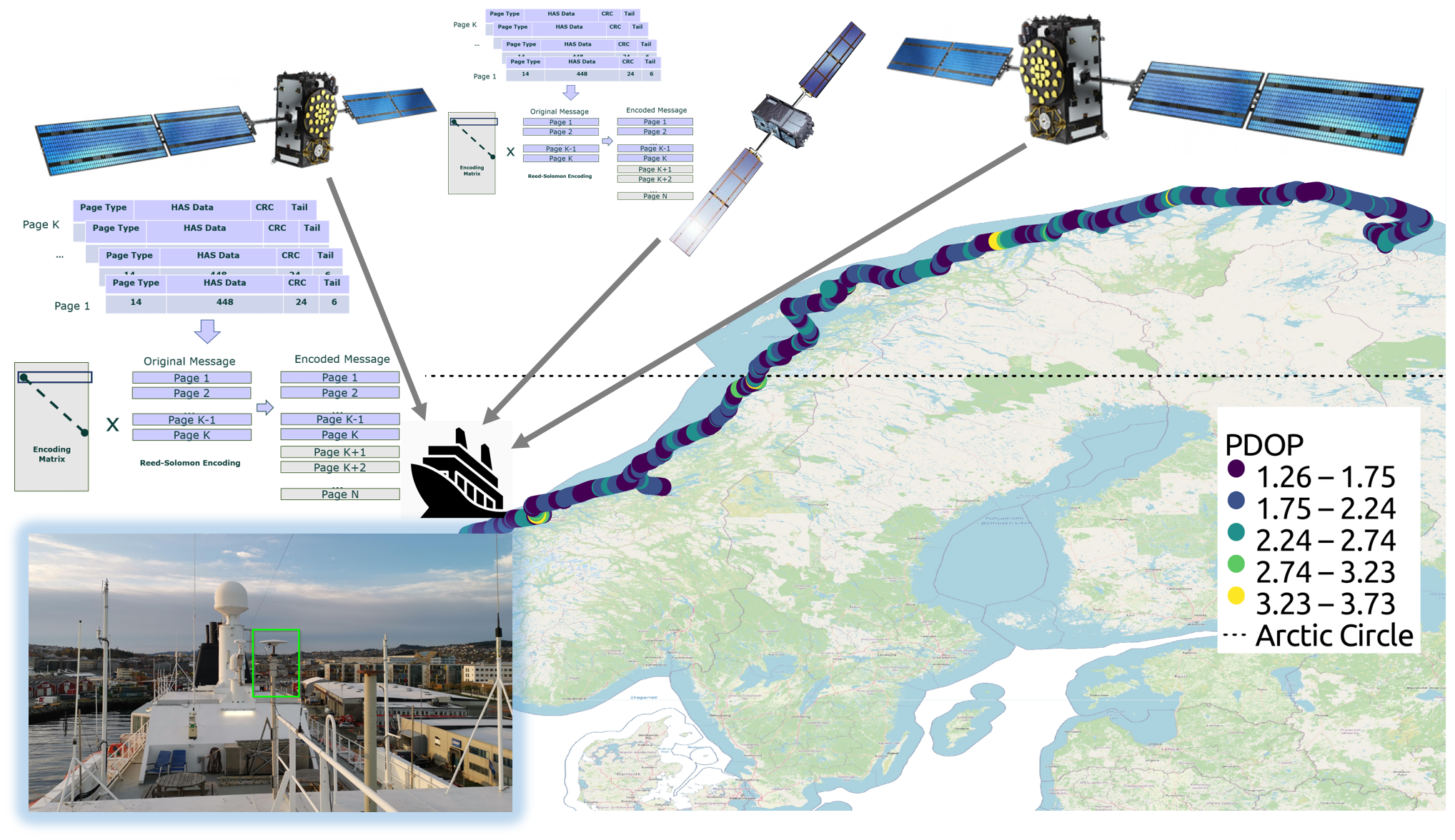
E6B data demodulation performance was assessed using real data collected by a high-end receiver mounted on board a Hurtigruten vessel. The vessel regularly sails along the Norwegian coast from Bergen to Kirkenes, and a full loop is completed in seven days. The sailing is performed at very high latitudes and most of the trip is within the Arctic Circle—the ship reaches latitudes higher than 71 degrees North. In addition, the vessel trajectory is surrounded by mountain peaks, steep cliffs, and fjords. The environmental conditions in which the data were collected make the observations unique and extremely valuable for assessing the E6B demodulation performance at high latitudes.
To collect E6B data, a dedicated multi-constellation multi-frequency Septentrio PolaRx5S receiver was installed on the vessel. The receiver implements joint data (E6B) and pilot (E6C) tracking and was configured to collect data at one hertz. The antenna used for the data collection was a Trimble Zephyr Model 2 Geodetic GNSS and covers all Galileo frequency bands. A view on top of the vessel towards the Trimble antenna is provided in
Figure 2.
This setup allowed the collection of GNSS data at very high latitudes. A total of 50 GB of data were collected from January to March 2021 and used for analyses presented in this paper.
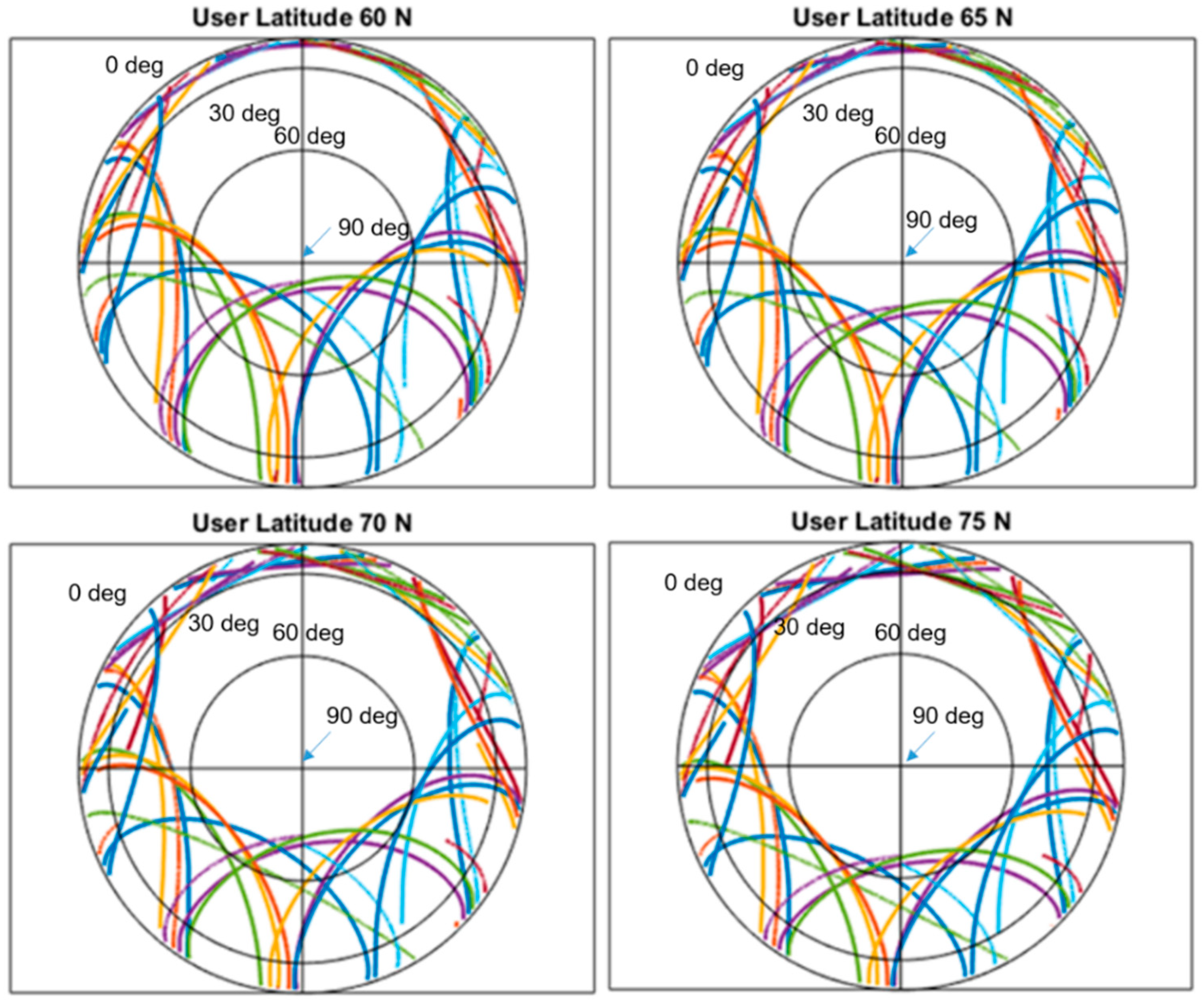
Because the whole data collection was carried out at high latitudes, a reduction of about 15 degrees in the maximum satellite elevation was observed. To further showcase the latitude impact on the satellite geometry, the skyplot for users at different latitudes is shown in
Figure 3 for a sample day and considering only Galileo satellites broadcasting E6 signals. The skyplots were obtained using almanac data from a reference station and considering users at different latitudes varying between 60 and 75 N degrees with a step of 5 degrees. Because the reference station collected data under ideal conditions, the satellite trajectories in the skyplots of
Figure 3 correspond to ideal open sky conditions.
The reduction of the satellite elevation when moving toward North is evident; in addition, the lack of satellites in the northern part of the skyplot is visible for users located at around 60 degrees latitude (e.g., Oslo). This gap is partially filled when further moving toward North. A similar trend can be observed for the entire period under observation.
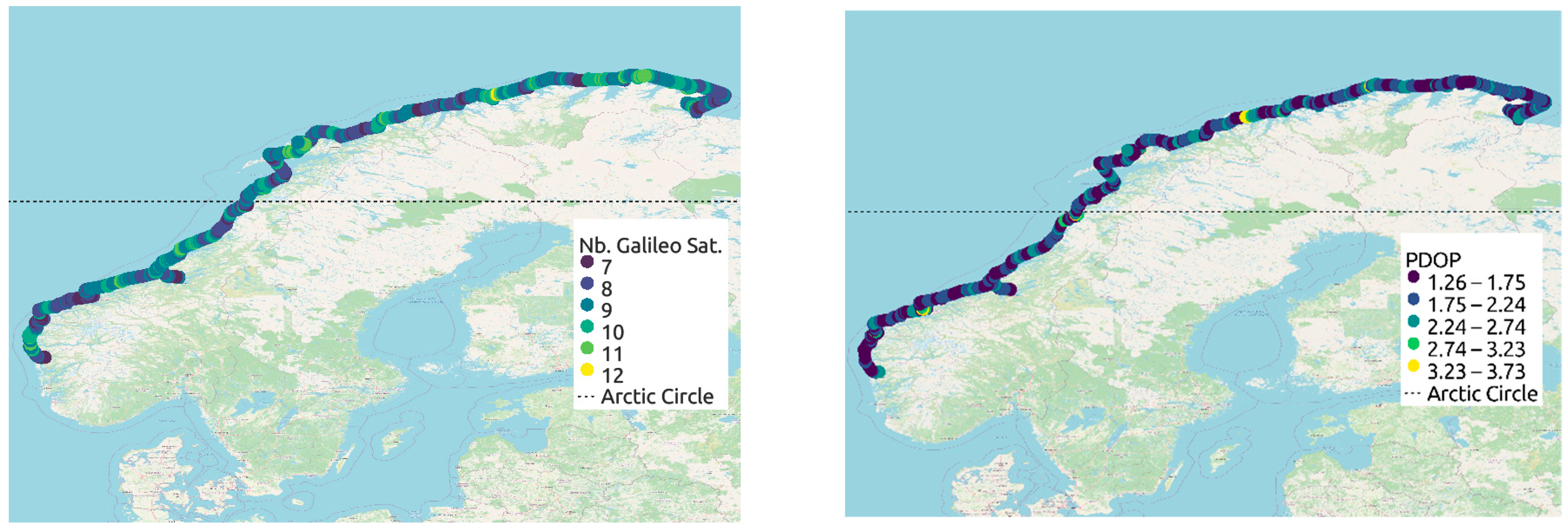
The number of visible Galileo satellites is a crucial element in the estimation of the TTRD. For this reason, the number of visible satellites observed along the vessel trajectory is shown in the left part of
Figure 4. The figure was produced by considering a full week of data collected on the vessel and considering observations with an epoch rate of five minutes. The number of satellites was determined considering an elevation mask of five degrees. For this reason, the number of visible satellites ranges from seven to twelve. Most of the satellites, however, have a low elevation and their number is significantly reduced when a mask of 15 degrees is applied. In this case, the number of satellites ranges from four to ten. In some part of the trajectory, a low number of satellites is recorded, and this is due to obstacles (fjord cliffs, mountains) blocking signal reception. The right side of
Figure 4 shows the trajectory of the vessel color coded as a function of the Position Dilution Of Precision (PDOP) for the Galileo satellite constellation; the PDOP value varies according to the number of visible satellites and its median value is 1.83.
4. Experimental Results
In this section, the performance metrics, detailed in
Section 2, are analyzed for the datasets collected on the vessel from the 3rd of January to the 30th of March 2021. For the decoding performance analysis, the original epoch rate of one second was applied. In this way, all the decoded E6B pages were considered.
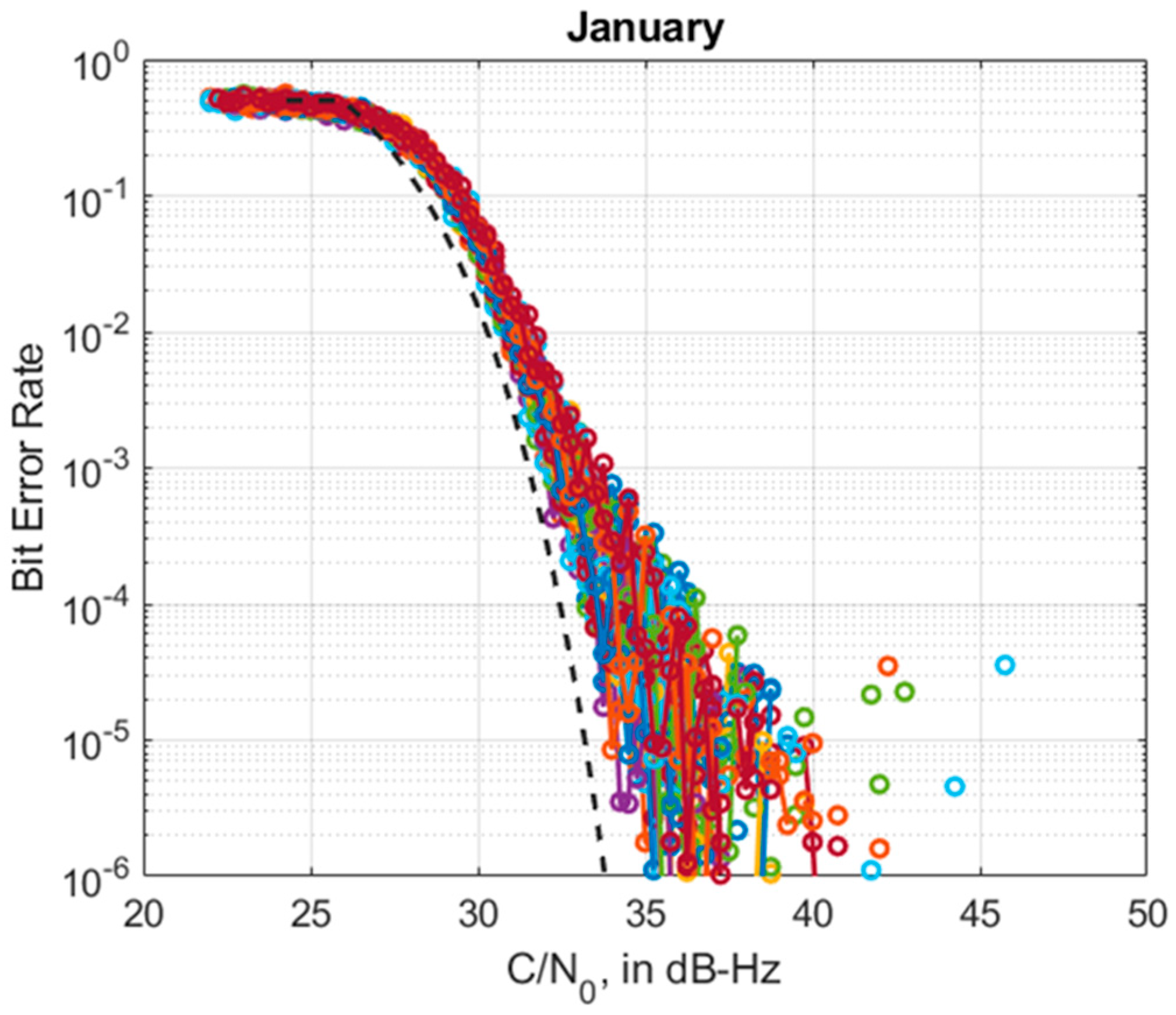
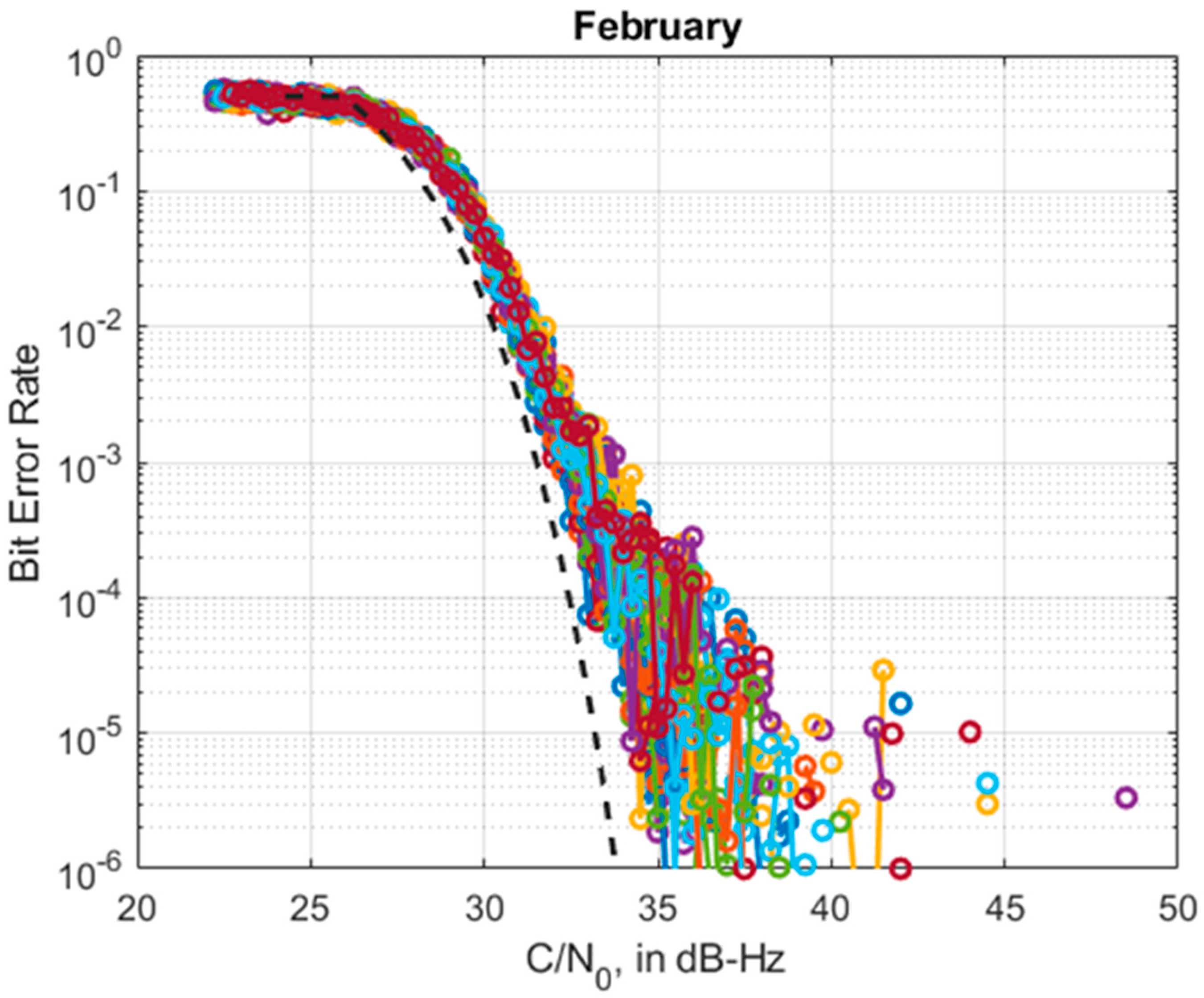
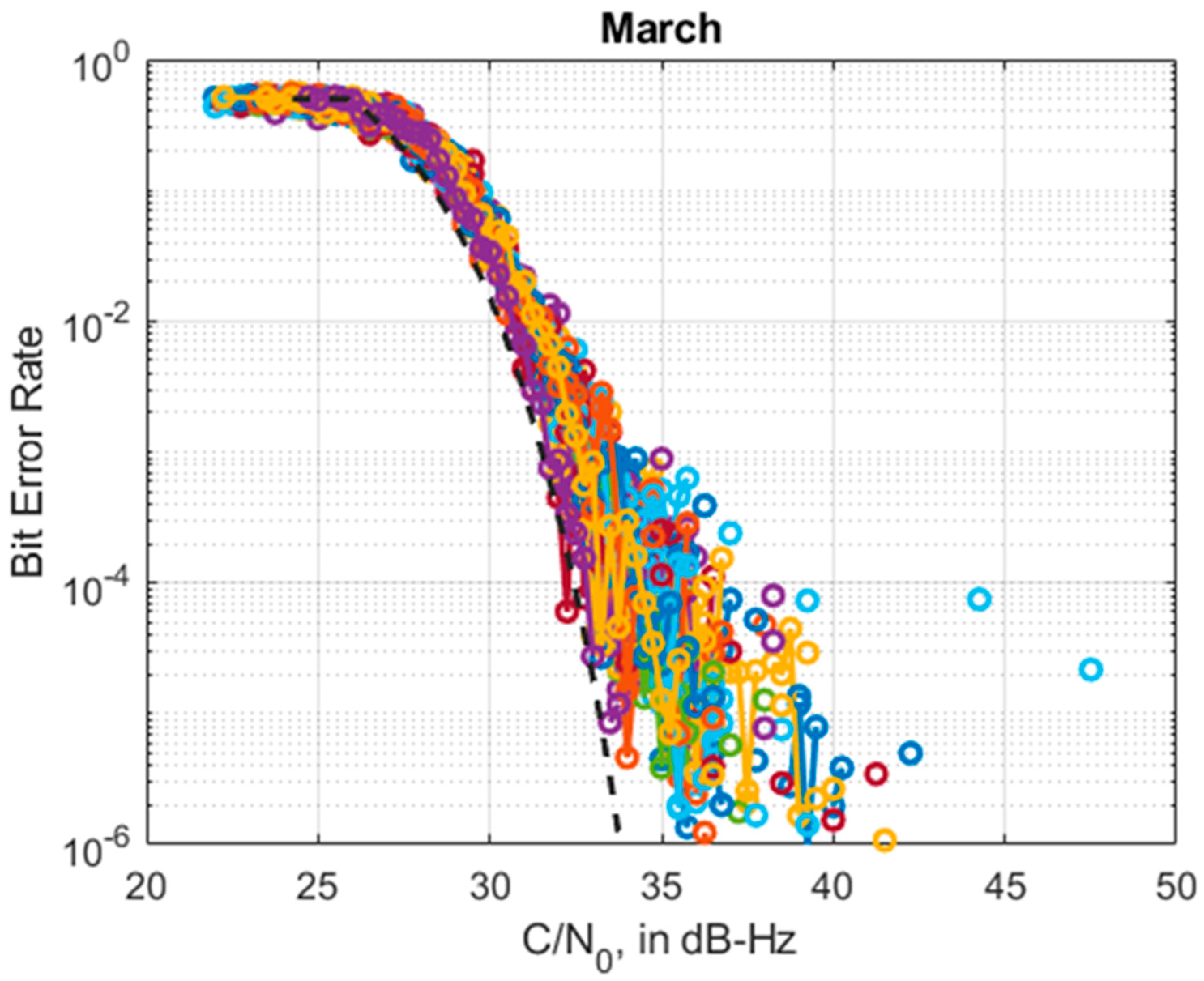
The empirical daily BER values versus
are shown in
Figure 5,
Figure 6 and
Figure 7 for the months of January, February, and March 2021, respectively. Consistent results are obtained with BERs achieving values around 0.5, which corresponds to a probability of a random guess, when the
is below 25 dB-Hz, in agreement with the results presented in previous studies (e.g., [
22,
23]). As mentioned in
Section 3, the receiver implements an E6B/C combined data-pilot tracking strategy. It should be noted that for other tracking approaches, for example based on a classical E6B data-only tracking, this
threshold assumes slightly higher values which are nonetheless below 30 dB-Hz, as examined in [
22,
23].
The empirical BER curves are also compared with the theoretical BER curve obtained assuming the presence of Gaussian noise only and represented by a dashed black line. It can be observed that the empirical curves closely follow the theoretical ones.
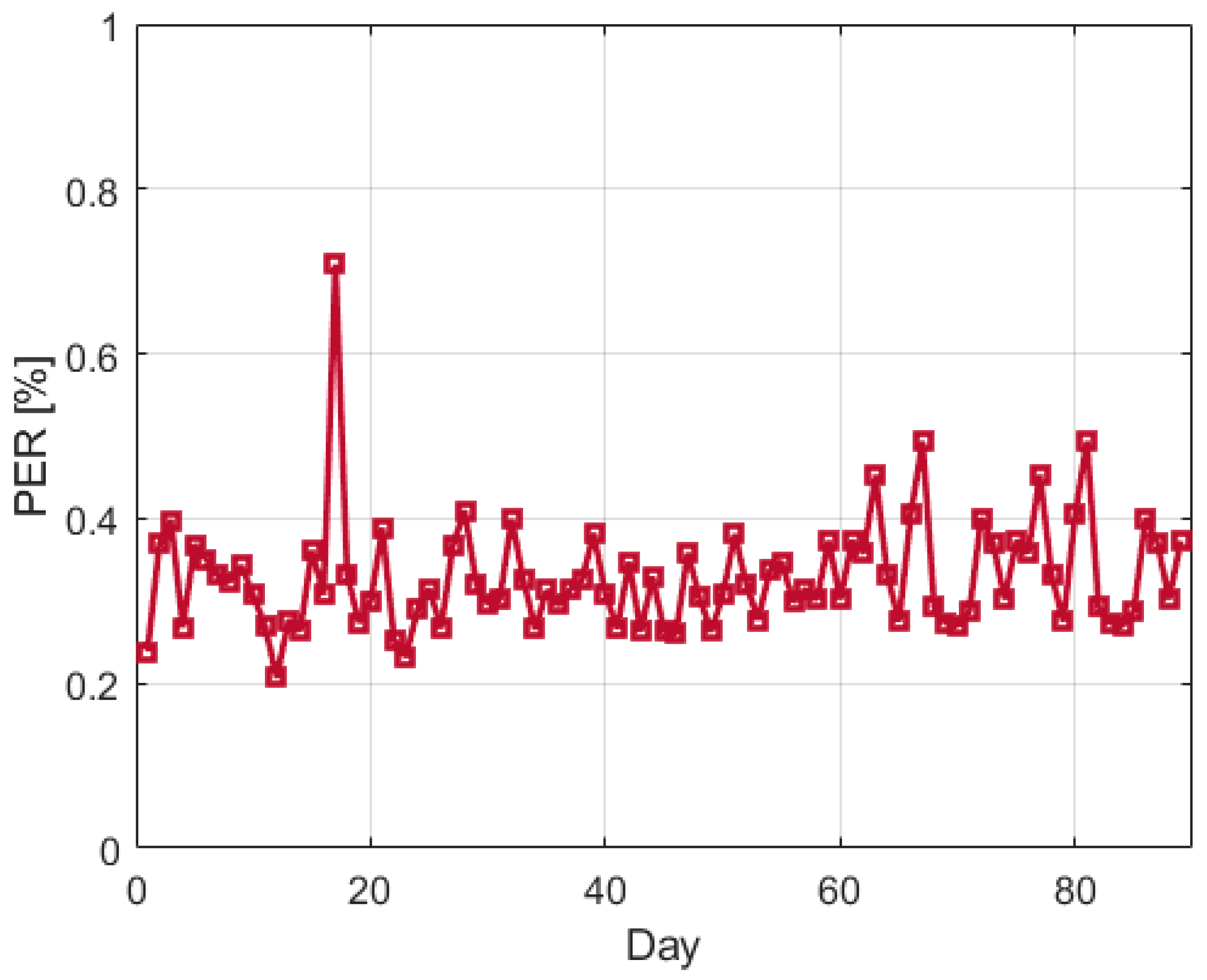
Moreover, the daily PER was evaluated and is shown in
Figure 8 for the entire period under observation. The estimated daily PER is always below one percent. It should be noted that, in agreement with the results presented in [
21], it was observed that the majority of the errors occur at the beginning and end of the satellite visibility period, when the
is lower and consequently, when, as shown in
Figure 5,
Figure 6 and
Figure 7, the BER is higher.
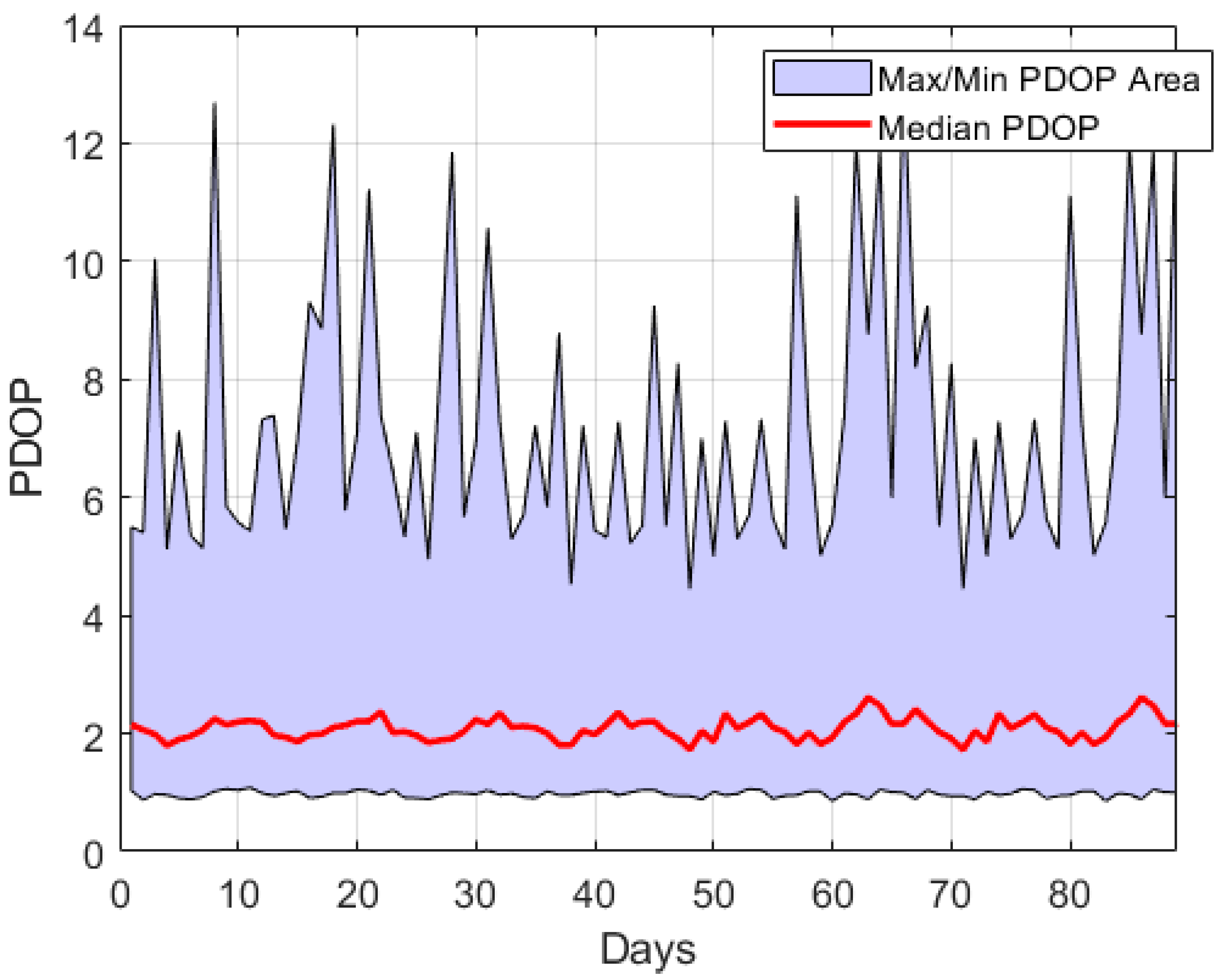
Given that at high latitudes the occurrence of satellites with low elevations can be frequent, it is of interest to analyze the PDOP under the period of observation, because this parameter may also affect the Galileo E6B demodulation performance. In
Figure 9, the maximum, minimum, and median PDOP daily values are shown for the Galileo satellite constellation and for all the examined days. The median PDOP curve follows a ten-day periodic trend which corresponds to the Galileo periodicity and achieves values around two, thus showing a general good satellite geometry. Indeed, maximum values of PDOP above ten are related to sporadic events occurring during the daily trip of the vessel.
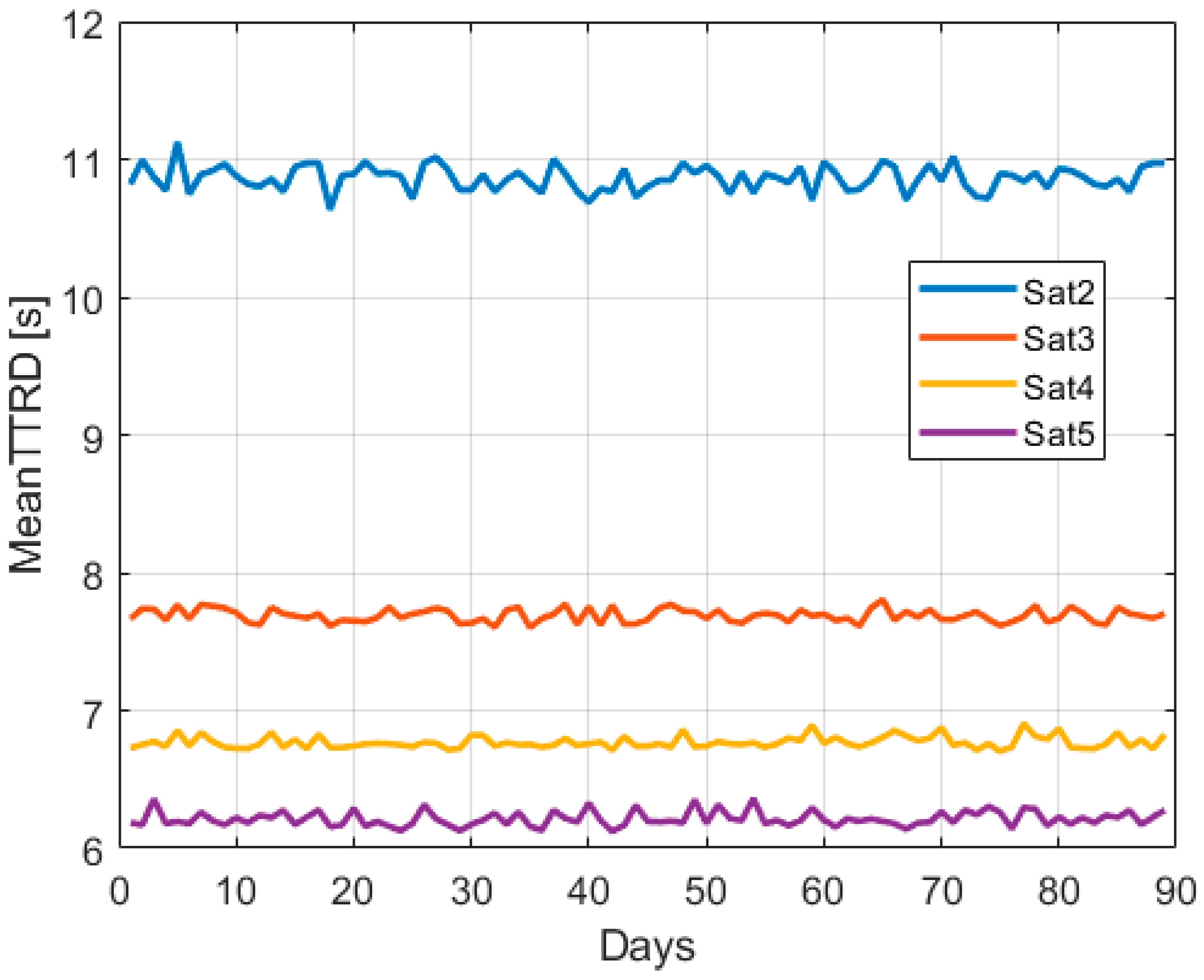
Finally, the TTRD was evaluated considering from two to five connected satellites and shown in
Figure 10. Indeed, it is of interest to assess the TTRD performance when only a few satellites are available. Note that only a few satellites simultaneously connect to the Galileo Uplink Stations (ULSs) and are able to provide HAS corrections at the same time. For this reason, a limited number of satellites was considered in the TTRD evaluation. For the analysis, the page availability estimated considering the CRC passage, as detailed in
Section 2, was exploited.
In agreement with the preliminary results reported in [
20], it is evident that, by increasing the number of connected satellites, the TTRD values decrease. In particular, when only two satellites are connected, the average TTRD is around eleven seconds, whereas when three or more satellites are corrected, the mean TTRD is always below eight seconds, and values of around six seconds are achieved with five connected satellites. It is worth noting that these values are significantly lower than the update rate of the corrections broadcast by the Galileo HAS.
5. Conclusions
This paper presents an assessment of the Galileo E6B demodulation performance at high latitudes. The work exploits data collected on a vessel traversing the Norwegian Sea and reaching the Arctic Circle. The test environment represents a challenging scenario, considering the high latitudes covered by the vessel trajectory and that the path is at the border of the Galileo HAS service area.
The large dataset, corresponding to about three months, allowed the extraction of significant statistics of different Galileo E6B demodulation performance indicators, such as the BER, PER, and TTRD. For the entire period under analysis, the empirical BER curves closely follow the theoretical curves, and the daily PER is always below one percent. Moreover, the TTRD analysis shows that the average time to retrieve the HAS corrections is always below eight seconds if the number of connected satellites is equal to or above three. These results, which are consistent over the observation period, showcase the effectiveness of the HAS dissemination scheme at high latitudes. As future work, it will be of interest to perform a comparable analysis at moderate latitudes considering similar visibility conditions.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









