
Error Characteristics of Pan-Arctic Digital Elevation Models and Elevation Derivatives in Northern Sweden


Abstract
:1. Introduction
2. Study Area and Data
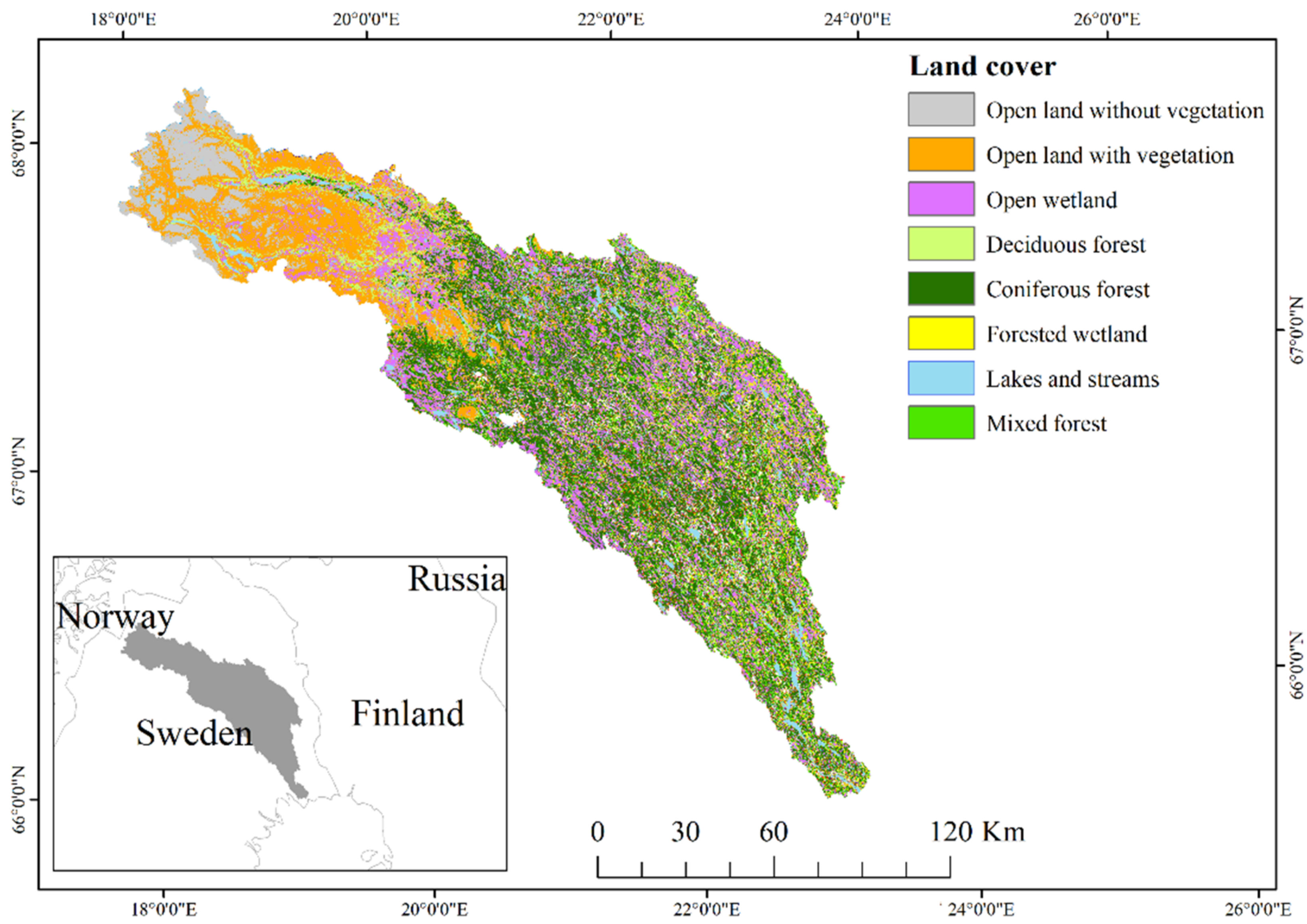
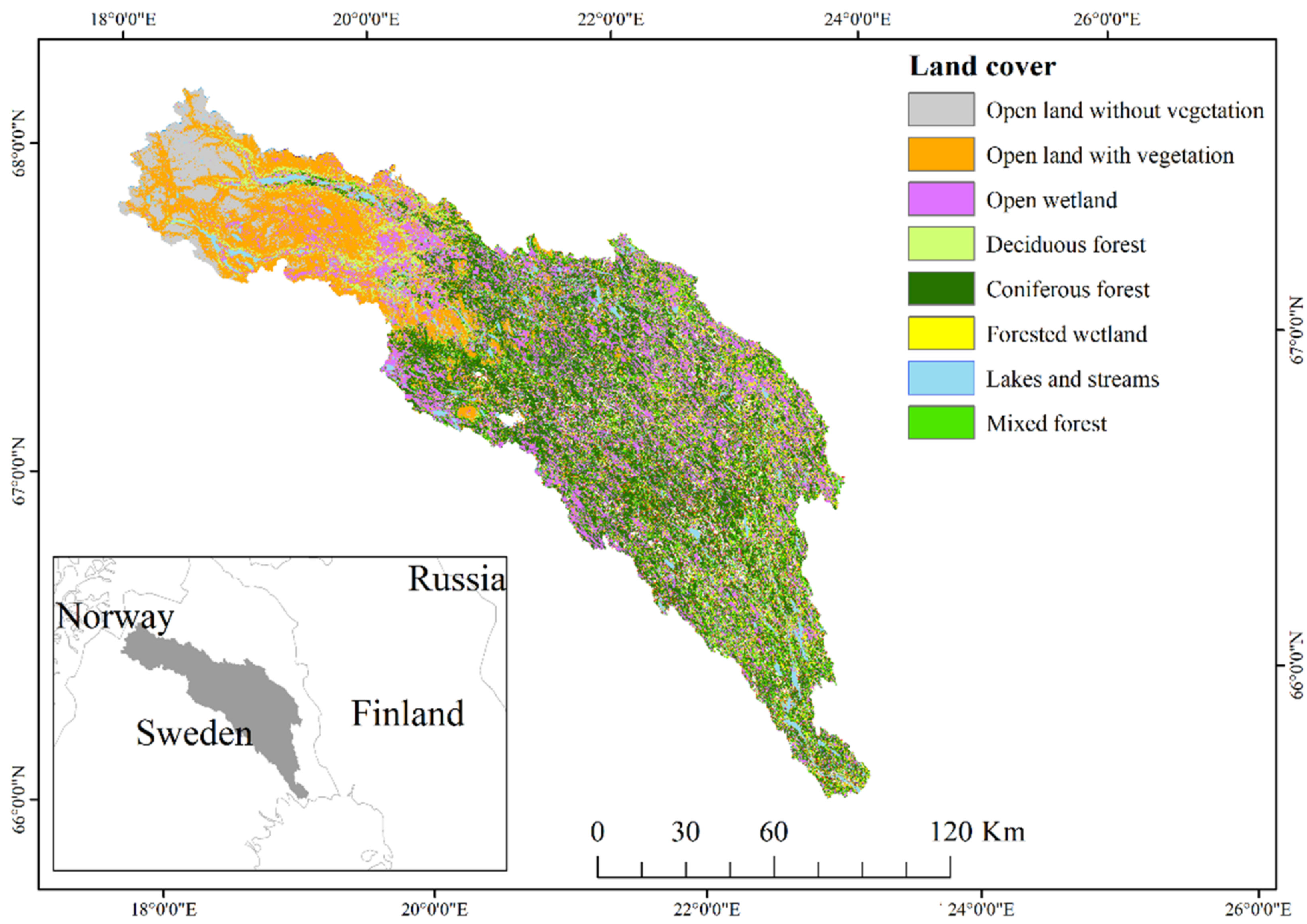
2.1. Study Area
2.2. Data
2.2.1. Arctic DEM
2.2.2. ALOS World 3D 30
2.2.3. ASTER Global DEM
2.2.4. Copernicus DEM
2.2.5. Swedish National DEM
2.2.6. Land Cover
3. Methods
3.1. Pre-Processing of DEMs
3.2. Computation of Topographic Wetness Index
3.3. Landform Classification
3.4. DEM Comparison and Accuracy Assessment
3.4.1. Spatial Sampling
3.4.2. Land Cover Stratification
3.4.3. Quality Metrics
4. Results and Discussion
4.1. Elevation Differences
4.1.1. Overall Differences
4.1.2. Vertical Errors by Land Cover Class
4.2. TWI Differences
4.2.1. Overall Differences
4.2.2. Land Cover Differences
4.3. Landform Classification Differences
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tucker, G.E.; Hancock, G.R. Modelling landscape evolution. Earth Surf. Process. Landf. 2010, 35, 28–50. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Doyle, F.J. Digital terrain models: An overviewe. Photogramm. Eng. Remote Sens. 1978, 44, 1481–1485. [Google Scholar]
- Li, Z.; Zhu, C.; Gold, C. Digital Terrain Modeling: Principles and Methodology, 1st ed.; CRC Press: Boca Raton, FL, USA, 2005; ISBN 9780415324625. [Google Scholar]
- Hirt, C. Digital Terrain Models. In Encyclopedia of Geodesy; Grafarend, E., Ed.; Springer International Publishing: Cham, Switzerland, 2014; pp. 1–6. ISBN 978-3-319-02370-0. [Google Scholar]
- Polidori, L.; El Hage, M. Digital elevation model quality assessment methods: A critical review. Remote Sens. 2020, 12, 3522. [Google Scholar] [CrossRef]
- Werner, M. Shuttle Radar Topography Mission (SRTM) Mission Overview. Frequenz 2001, 55, 75–79. [Google Scholar] [CrossRef]
- Tachikawa, T.; Kaku, M.; Iwasaki, A.; Gesch, D.B.; Oimoen, M.J.; Zhang, Z.; Danielson, J.J.; Krieger, T.; Curtis, B.; Haase, J.; et al. ASTER Global Digital Elevation Model Version 2—Summary of Validation Results, 2nd ed.; NASA: Sioux Falls, SD, USA, 2011. [Google Scholar]
- Tadono, T.; Nagai, H.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Generation of the 30 M-MESH global digital surface model by alos prism. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Arch. 2016, 41, 157–162. [Google Scholar] [CrossRef] [Green Version]
- Krieger, G.; Zink, M.; Bachmann, M.; Bräutigam, B.; Schulze, D.; Martone, M.; Rizzoli, P.; Steinbrecher, U.; Walter Antony, J.; De Zan, F.; et al. TanDEM-X: A radar interferometer with two formation-flying satellites. Acta Astronaut. 2013, 89, 83–98. [Google Scholar] [CrossRef] [Green Version]
- Zink, M.; Bachmann, M.; Brautigam, B.; Fritz, T.; Hajnsek, I.; Moreira, A.; Wessel, B.; Krieger, G. TanDEM-X: The new global DEM takes shape. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–23. [Google Scholar] [CrossRef]
- González-Moradas, M.d.R.; Viveen, W. Evaluation of ASTER GDEM2, SRTMv3.0, ALOS AW3D30 and TanDEM-X DEMs for the Peruvian Andes against highly accurate GNSS ground control points and geomorphological-hydrological metrics. Remote Sens. Environ. 2020, 237, 111509. [Google Scholar] [CrossRef]
- Gumbricht, T.; Roman-Cuesta, R.M.; Verchot, L.; Herold, M.; Wittmann, F.; Householder, E.; Herold, N.; Murdiyarso, D. An expert system model for mapping tropical wetlands and peatlands reveals South America as the largest contributor. Glob. Chang. Biol. 2017, 23, 3581–3599. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karlson, M.; Gålfalk, M.; Crill, P.; Bousquet, P.; Saunois, M.; Bastviken, D. Delineating northern peatlands using Sentinel-1 time series and terrain indices from local and regional digital elevation models. Remote Sens. Environ. 2019, 231, 111252. [Google Scholar] [CrossRef]
- Hinzman, L.D.; Bettez, N.D.; Bolton, W.R.; Chapin, F.S.; Dyurgerov, M.B.; Fastie, C.L.; Griffith, B.; Hollister, R.D.; Hope, A.; Huntington, H.P.; et al. Evidence and implications of recent climate change in northern Alaska and other Arctic regions. Clim. Change 2005, 72, 251–298. [Google Scholar] [CrossRef]
- Intergovernmental Panel on Climate Change. Climate Change 2014—Impacts, Adaptation and Vulnerability: Part B: Regional Aspects: Working Group II Contribution to the IPCC Fifth Assessment Report: Volume 2: Regional Aspects; Cambridge University Press: Cambridge, UK, 2014; Volume 2, ISBN 9781107058163.
- Hutengs, C.; Vohland, M. Downscaling land surface temperatures at regional scales with random forest regression. Remote Sens. Environ. 2016, 178, 127–141. [Google Scholar] [CrossRef]
- Philipp, M.; Dietz, A.; Buchelt, S.; Kuenzer, C. Trends in satellite Earth observation for permafrost related analyses—A review. Remote Sens. 2021, 13, 1217. [Google Scholar] [CrossRef]
- Veremeeva, A.; Nitze, I.; Günther, F.; Grosse, G.; Rivkina, E. Geomorphological and climatic drivers of thermokarst lake area increase trend (1999–2018) in the Kolyma lowland yedoma region, north-eastern Siberia. Remote Sens. 2021, 13, 178. [Google Scholar] [CrossRef]
- Florinsky, I.V. Combined analysis of digital terrain models and remotely sensed data in landscape investigations. Prog. Phys. Geogr. Earth Environ. 1998, 22, 33–60. [Google Scholar] [CrossRef]
- Mesa-Mingorance, J.L.; Ariza-López, F.J. Accuracy assessment of digital elevation models (DEMs): A critical review of practices of the past three decades. Remote Sens. 2020, 12, 2630. [Google Scholar] [CrossRef]
- Strobl, P.A.; Bielski, C.; Guth, P.L.; Grohmann, C.H.; Muller, J.-P.; López-Vázquez, C.; Gesch, D.B.; Amatulli, G.; Riazanoff, S.; Carabajal, C. The Digital Elevation Model Intercomparison Experiment DEMIX, a community-based approach at global DEM benchmarking. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B4-2, 395–400. [Google Scholar] [CrossRef]
- Caglar, B.; Becek, K.; Mekik, C.; Ozendi, M. On the vertical accuracy of the ALOS world 3D-30m digital elevation model. Remote Sens. Lett. 2018, 9, 607–615. [Google Scholar] [CrossRef]
- Becek, K.; Koppe, W.; Kutoğlu, Ş.H. Evaluation of vertical accuracy of the WorldDEMTM using the runway method. Remote Sens. 2016, 8, 934. [Google Scholar] [CrossRef] [Green Version]
- Wechsler, S.P. Uncertainties associated with digital elevation models for hydrologic applications: A review. Hydrol. Earth Syst. Sci. 2007, 11, 1481–1500. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Song, C.; Ke, L.; Jiang, L.; Pan, Y.; Ma, R. Global open-access DEM performances in Earth’s most rugged region High Mountain Asia: A multi-level assessment. Geomorphology 2019, 338, 16–26. [Google Scholar] [CrossRef]
- Singh, M.K.; Gupta, R.D.; Snehmani; Bhardwaj, A.; Ganju, A. Scenario-based validation of moderate resolution DEMs freely available for complex Himalayan terrain. Pure Appl. Geophys. 2016, 173, 463–485. [Google Scholar] [CrossRef]
- Florinsky, I.V.; Skrypitsyna, T.N.; Trevisani, S.; Romaikin, S.V. Statistical and visual quality assessment of nearly-global and continental digital elevation models of Trentino, Italy. Remote Sens. Lett. 2019, 10, 726–735. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.; Jin, X.; He, Q.; Zhang, X. Comparison of digital elevation models and relevant derived attributes. J. Appl. Remote Sens. 2017, 11, 046027. [Google Scholar] [CrossRef]
- Boulton, S.J.; Stokes, M. Which DEM is best for analyzing fluvial landscape development in mountainous terrains? Geomorphology 2018, 310, 168–187. [Google Scholar] [CrossRef]
- Kramm, T.; Hoffmeister, D. Evaluation of digital elevation models for geomorphometric analyses on different scales for northern Chile. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 1229–1235. [Google Scholar] [CrossRef] [Green Version]
- Pipaud, I.; Loibl, D.; Lehmkuhl, F. Evaluation of TanDEM-X elevation data for geomorphological mapping and interpretation in high mountain environments—A case study from SE Tibet, China. Geomorphology 2015, 246, 232–254. [Google Scholar] [CrossRef]
- Glennie, C. Arctic high-resolution elevation models: Accuracy in sloped and vegetated terrain. J. Surv. Eng. 2018, 144, 6017003. [Google Scholar] [CrossRef]
- Xing, Z.; Chi, Z.; Yang, Y.; Chen, S.; Huang, H.; Cheng, X.; Hui, F. Accuracy evaluation of four Greenland digital elevation models (DEMs) and assessment of river network extraction. Remote Sens. 2020, 12, 3429. [Google Scholar] [CrossRef]
- Howat, I.M.; Negrete, A.; Smith, B.E. The Greenland Ice Mapping Project (GIMP) land classification and surface elevation data sets. Cryosphere 2014, 8, 1509–1518. [Google Scholar] [CrossRef] [Green Version]
- Toutin, T.; Blondel, E.; Clavet, D.; Schmitt, C. Stereo radargrammetry with Radarsat-2 in the Canadian Arctic. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2601–2609. [Google Scholar] [CrossRef]
- Naturvårdsverket Nationella Marktäckesdata 2018 Baskikt; Naturvårdsverket: Stockholm, Sweden, 2020.
- Porter, C.; Morin, P.; Howat, I.; Noh, M.-J.; Bates, B.; Peterman, K.; Keesey, S.; Schlenk, M.; Gardiner, J.; Tomko, K.; et al. ArcticDEM 2018; Harvard Dataverse, Polar Geospatial Centre, University of Minnesota: Saint Paul, MN, USA, 2018. [Google Scholar] [CrossRef]
- Noh, M.-J.; Howat, I.M. Automated stereo-photogrammetric DEM generation at high latitudes: Surface Extraction with TIN-based Search-space Minimization (SETSM) validation and demonstration over glaciated regions. GIScience Remote Sens. 2015, 52, 198–217. [Google Scholar] [CrossRef]
- Shi, W.Z.; Li, Q.Q.; Zhu, C.Q. Estimating the propagation error of DEM from higher-order interpolation algorithms. Int. J. Remote Sens. 2005, 26, 3069–3084. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T.; Tsutsui, K. Generation of high resolution global DSM from ALOS PRISM. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-4, 243–248. [Google Scholar] [CrossRef] [Green Version]
- Takaku, J.; Tadono, T. High resolution DSM generation from ALOS PRISM—processing status and influence of attitude fluctuation. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4228–4231. [Google Scholar]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise global DEM generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II4, 71–76. [Google Scholar] [CrossRef] [Green Version]
- Abrams, M.; Crippen, R.; Fujisada, H. ASTER Global Digital Elevation Model (GDEM) and ASTER Global Water Body Dataset (ASTWBD). Remote Sens. 2020, 12, 1156. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, N.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A nationwide forest attribute map of Sweden predicted using airborne laser scanning data and field data from the National Forest Inventory. Remote Sens. Environ. 2017, 194, 447–454. [Google Scholar] [CrossRef]
- Höhle, J.; Höhle, M. Accuracy assessment of digital elevation models by means of robust statistical methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, M.; Ahlkrona, E.; Jönsson, C.; Allard, A. Regionala jämförelser mellan Nationella Marktäckedata och fältdata från Riksskogstaxeringen och NILS; Sveriges Lantbruksuniversitet: Umeå, Sweden, 2020. [Google Scholar]
- Karney, C.F.F. GeographicLib, Version 1.52. 2019. Available online: https://geographiclib.sourceforge.io/1.52 (accessed on 22 June 2021).
- Abrams, M.; Crippen, R. ASTER GDEM V3—User Guide Version 1; California Institute of Technology: Pasadena, CA, USA, 2019. [Google Scholar]
- Fahrland, E.; Jacob, P.; Schrader, H.; Kahabka, H. Copernicus Digital Elevation Model—Product Handbook; Airbus Defence and Space—Intelligence: Potsdam, Germany, 2020. [Google Scholar]
- Alganci, U.; Besol, B.; Sertel, E. Accuracy assessment of different digital surface models. ISPRS Int. J. Geo-Inf. 2018, 7, 114. [Google Scholar] [CrossRef] [Green Version]
- Beven, K.J.; Kirby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Mattivi, P.; Franci, F.; Lambertini, A.; Bitelli, G. TWI computation: A comparison of different open source GISs. Open Geospat. Data Softw. Stand. 2019, 4, 6. [Google Scholar] [CrossRef]
- Neteler, M.; Bowman, M.H.; Landa, M.; Metz, M. GRASS GIS: A multi-purpose open source GIS. Environ. Model. Softw. 2012, 31, 124–130. [Google Scholar] [CrossRef] [Green Version]
- Freeman, T.G. Calculating catchment area with divergent flow based on a regular grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Quinn, P.; Beven, K.; Chevallier, P.; Planchon, O. The prediction of hillslope flow paths for distributed hydrological modelling using digital terrain models. Hydrol. Process. 1991, 5, 59–79. [Google Scholar] [CrossRef]
- Mokarram, M.; Sathyamoorthy, D. A review of landform classification methods. Spat. Inf. Res. 2018, 26, 647–660. [Google Scholar] [CrossRef]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Błaszczyk, M.; Ignatiuk, D.; Grabiec, M.; Kolondra, L.; Laska, M.; Decaux, L.; Jania, J.; Berthier, E.; Luks, B.; Barzycka, B.; et al. Quality assessment and glaciological applications of digital elevation models derived from space-borne and aerial images over two tidewater glaciers of southern spitsbergen. Remote Sens. 2019, 11, 1121. [Google Scholar] [CrossRef] [Green Version]
- Bolkas, D.; Fotopoulos, G.; Braun, A.; Tziavos, I.N. Assessing digital elevation model uncertainty using GPS survey data. J. Surv. Eng. 2016, 142, 4016001. [Google Scholar] [CrossRef]
- Gesch, D.; Oimoen, M.; Danielson, J.; Meyer, D. Validation of the ASTER global digital elevation model version 3 over the conterminous United States. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 143–148. [Google Scholar] [CrossRef] [Green Version]
- Elkhrachy, I. Vertical accuracy assessment for SRTM and ASTER digital elevation models: A case study of Najran city, Saudi Arabia. Ain Shams Eng. J. 2018, 9, 1807–1817. [Google Scholar] [CrossRef]
- Wessel, B.; Huber, M.; Wohlfart, C.; Marschalk, U.; Kosmann, D.; Roth, A. Accuracy assessment of the global TanDEM-X Digital Elevation Model with GPS data. ISPRS J. Photogramm. Remote Sens. 2018, 139, 171–182. [Google Scholar] [CrossRef]
- Becek, K. Investigating error structure of shuttle radar topography mission elevation data product. Geophys. Res. Lett. 2008, 35, L15403. [Google Scholar] [CrossRef]
- Becek, K.; Akgül, V.; Inyurt, S.; Mekik, Ç.; Pochwatka, P. How well can spaceborne digital elevation models represent a man-made structure: A runway case study. Geosciences 2019, 9, 387. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, J.H.; Bachmann, M.; Scheiber, R.; Krieger, G. Definition of ICESat selection criteria for their use as height references for TanDEM-X. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2750–2757. [Google Scholar] [CrossRef]
- Mouratidis, A.; Ampatzidis, D. European digital elevation model validation against extensive Global Navigation Satellite Systems data and comparison with SRTM DEM and ASTER GDEM in Central Macedonia (Greece). ISPRS Int. J. Geo-Inf. 2019, 8, 108. [Google Scholar] [CrossRef] [Green Version]
- Fisher, P.F.; Tate, N.J. Causes and consequences of error in digital elevation models. Prog. Phys. Geogr. 2006, 30, 467–489. [Google Scholar] [CrossRef]
- Oksanen, J.; Sarjakoski, T. Error propagation of DEM-based surface derivatives. Comput. Geosci. 2005, 31, 1015–1027. [Google Scholar] [CrossRef]
- Marthews, T.R.; Dadson, S.J.; Lehner, B.; Abele, S.; Gedney, N. High-resolution global topographic index values for use in large-scale hydrological modelling. Hydrol. Earth Syst. Sci. 2015, 19, 91–104. [Google Scholar] [CrossRef] [Green Version]
- Szabó, G.; Singh, S.K.; Szabó, S. Slope angle and aspect as influencing factors on the accuracy of the SRTM and the ASTER GDEM databases. Phys. Chem. Earth Parts A/B/C 2015, 83–84, 137–145. [Google Scholar] [CrossRef]
- Leitão, J.P.; de Sousa, L.M. Towards the optimal fusion of high-resolution Digital Elevation Models for detailed urban flood assessment. J. Hydrol. 2018, 561, 651–661. [Google Scholar] [CrossRef]
- Grabs, T.; Seibert, J.; Bishop, K.; Laudon, H. Modeling spatial patterns of saturated areas: A comparison of the topographic wetness index and a dynamic distributed model. J. Hydrol. 2009, 373, 15–23. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distribution of Vegetation Height Classes in Study Area | |||||||
|---|---|---|---|---|---|---|---|
| Height class (m) | 0–0.5 | 0.5–5 | 5–10 | 10–15 | 15–20 | 20–25 | >25–30 |
| Percent of study area | 29.1% | 15.4% | 30.5% | 19.2% | 5.4% | 0.3% | <0.1% |
| Total area (km2) | 5277 | 2790 | 5536 | 3487 | 986 | 50 | 1 |
| Landform Class | Description |
|---|---|
| Flat | Areas with small variations in elevation and low slope |
| Summit | Mountain tops |
| Ridge | Narrow range of hills |
| Shoulder | Part of a hill where it curves towards the top |
| Spur | Lateral ridge or tongue of land descending from a hill |
| Slope | Areas with uniform slope |
| Hollow | Cavity within higher elevation areas |
| Footslope | Area with gently inclined slope at the foot of a hill |
| Valley | Long depression in the land surface that often contains a watercourse at the bottom |
| Depression | Area with lower elevation compared to the surrounding, but more extensive compared to a hollow |
| DEM Product | Mean (m) | SD (m) | Nr. Cells | RMSE (m) | rSweDEM | rSlope | Outliers (%) |
|---|---|---|---|---|---|---|---|
| Arctic DEM | 1.35 | 3.29 | 173,182,213 | 3.56 | 1.0 | 0.27 | 0.16 |
| ASTER | −10.63 | 7.52 | 183,673,063 | 13.02 | 0.99 | 0.13 | 0.40 |
| ALOS | 2.09 | 3.45 | 182,906,335 | 4.03 | 1.0 | 0.36 | 0.78 |
| Copernicus | 1.42 | 1.99 | 183,709,521 | 2.44 | 1.0 | 0.41 | 0.38 |
| Land Cover | Mean (m) | SD (m) | RMSE (m) | rSlope | Mean (m) | SD (m) | RMSE (m) | rSlope |
|---|---|---|---|---|---|---|---|---|
| Arctic DEM | ALOS DEM | |||||||
| Open wetland | −0.36 | 1.71 | 1.75 | 0.19 | 1.22 | 2.04 | 2.37 | 0.04 |
| Open land with vegetation | 0.40 | 1.48 | 1.53 | 0.20 | 1.70 | 3.69 | 4.07 | 0.54 |
| Coniferous forest | 3.29 | 4.00 | 5.18 | 0.05 | 2.92 | 2.86 | 4.09 | 0.18 |
| Mixed forest | 3.05 | 3.57 | 4.70 | 0.05 | 2.80 | 2.66 | 3.86 | 0.14 |
| Deciduous forest | 1.48 | 2.69 | 3.07 | 0.19 | 2.59 | 2.89 | 3.88 | 0.23 |
| Forest on wetland | 2.23 | 3.03 | 3.77 | 0.13 | 2.29 | 1.98 | 3.03 | 0.03 |
| Open land without vegetation | 0.88 | 2.10 | 2.28 | 0.10 | 1.05 | 8.07 | 8.14 | 0.38 |
| Lakes and streams | −0.75 | 2.25 | 2.37 | - | 1.77 | 3.67 | 4.08 | - |
| ASTER DEM | Copernicus DEM | |||||||
| Open wetland | −12.31 | 6.53 | 13.94 | 0.05 | 0.30 | 0.62 | 0.69 | 0.34 |
| Open land with vegetation | −9.44 | 7.56 | 12.10 | 0.22 | 0.46 | 1.28 | 1.37 | 0.49 |
| Coniferous forest | −10.47 | 7.55 | 12.89 | 0.02 | 3.09 | 1.83 | 3.59 | 0.19 |
| Mixed forest | −9.87 | 7.12 | 12.17 | 0.02 | 2.51 | 1.75 | 3.06 | 0.10 |
| Deciduous forest | −10.36 | 6.92 | 12.46 | 0.10 | 1.56 | 1.51 | 2.17 | 0.21 |
| Forest on wetland | −11.04 | 6.92 | 13.02 | 0.02 | 1.52 | 1.35 | 2.03 | 0.14 |
| Open land without vegetation | −9.17 | 10.46 | 13.91 | 0.31 | −0.14 | 2.32 | 2.32 | 0.45 |
| Lakes and streams | −11.29 | 7.31 | 13.45 | - | −0.21 | 0.85 | 0.88 | 0.32 |
| DEM | Mean (TWI) | SD (TWI) | Nr. Cells | RMSE (TWI) | relRMSE (%) | rSweDEM | rSlope | Outliers (%) |
|---|---|---|---|---|---|---|---|---|
| Arctic DEM | −1.10 | 3.82 | 170,120,920 | 3.98 | 49.7% | 0.243 | −0.30 | 2.1 |
| ASTER | −1.41 | 3.45 | 179,845,235 | 3.72 | 46.5% | 0.191 | −0.274 | 2.4 |
| ALOS | −0.37 | 3.16 | 179,916,579 | 3.18 | 39.7% | 0.244 | −0.25 | 2.3 |
| Copernicus | −0.45 | 3.15 | 179,908,597 | 3.18 | 39.7% | 0.422 | −0.229 | 2.4 |
| Land Cover | Mean (TWI) | SD (TWI) | r | RMSE (TWI) | Mean (TWI) | SD (TWI) | r | RMSE (TWI) |
|---|---|---|---|---|---|---|---|---|
| Arctic DEM | ALOS DEM | |||||||
| Open wetland | −1.50 | 4.67 | 0.12 | 4.90 | −1.09 | 3.80 | 0.06 | 3.94 |
| Open land with vegetation | −0.13 | 2.67 | 0.42 | 2.67 | 0.30 | 2.63 | 0.26 | 2.65 |
| Coniferous forest | −1.16 | 3.45 | 0.13 | 3.64 | −0.06 | 2.56 | 0.21 | 2.55 |
| Mixed forest | −1.46 | 3.68 | 0.11 | 3.96 | −0.19 | 2.82 | 0.18 | 2.83 |
| Deciduous forest | −0.92 | 3.38 | 0.21 | 3.50 | 0.10 | 2.85 | 0.20 | 2.84 |
| Forest on wetland | −2.77 | 4.48 | 0.05 | 5.27 | −1.07 | 3.80 | 0.04 | 3.95 |
| Open land without vegetation | 0.15 | 1.76 | 0.63 | 1.76 | 0.21 | 2.09 | 0.41 | 2.10 |
| Lakes and streams | −5.45 | 5.80 | 0.24 | 7.96 | −4.95 | 4.76 | 0.08 | 6.87 |
| ASTER DEM | Copernicus DEM | |||||||
| Open wetland | −2.76 | 3.87 | 0.02 | 4.79 | −0.73 | 3.94 | 0.12 | 4.01 |
| Open land with vegetation | −0.62 | 3.02 | 0.10 | 3.08 | 0.18 | 2.50 | 0.38 | 2.50 |
| Coniferous forest | −0.88 | 2.95 | 0.04 | 3.08 | −0.51 | 2.61 | 0.22 | 2.66 |
| Mixed forest | −1.29 | 3.13 | 0.05 | 3.39 | −0.66 | 2.90 | 0.17 | 2.98 |
| Deciduous forest | −0.88 | 3.24 | 0.04 | 3.35 | −0.29 | 2.85 | 0.24 | 2.86 |
| Forest on wetland | −2.57 | 3.80 | 0.04 | 4.59 | −1.66 | 3.73 | 0.07 | 4.08 |
| Open land without vegetation | −0.10 | 2.32 | 0.03 | 2.32 | 0.16 | 1.98 | 0.52 | 1.98 |
| Lakes and streams | −5.53 | 4.47 | 0.21 | 7,11 | −2.25 | 5.34 | 0.21 | 5.79 |
| Candidate DEM | Overall Accuracy (%) | Kappa |
|---|---|---|
| Arctic DEM | 40.87 | 0.26 |
| ALOS | 39.12 | 0.21 |
| ASTER | 25.39 | 0.07 |
| Copernicus | 54.84 | 0.40 |
| Landform Class | UA (%) | PA (%) | UA (%) | PA (%) | Reference Cells | Reference Cells (%) |
|---|---|---|---|---|---|---|
| Arctic DEM | ALOS | |||||
| Flat | 31.9 | 95.0 | 22.8 | 88.5 | 72,439 | 33.0 |
| Summit | 20.8 | 4.5 | 6.0 | 4.0 | 780 | 0.07 |
| Ridge | 36.6 | 12.0 | 19.8 | 9.9 | 6045 | 2.7 |
| Shoulder | 9.8 | 15.7 | 15.7 | 8.5 | 8376 | 3.8 |
| Spur | 30.2 | 20.0 | 18.8 | 15.3 | 15,992 | 7.4 |
| Slope | 61.3 | 62.3 | 70.9 | 56.8 | 83,032 | 37.7 |
| Hollow | 27.7 | 16.6 | 15.6 | 12.3 | 13,223 | 6.1 |
| Footslope | 17.6 | 19.1 | 14.0 | 11.0 | 14,461 | 6.7 |
| Valley | 38.3 | 9.5 | 17.1 | 7.0 | 5403 | 2.5 |
| Depression | 19.8 | 1.2 | 2.4 | 0.5 | 249 | 0.03 |
| Mean | 29.4 | 25.6 | 20.3 | 21.4 | ||
| ASTER | Copernicus | |||||
| Flat | 6.0 | 96.2 | 62.2 | 92.6 | 72,439 | 33.0 |
| Summit | 2.6 | 0.7 | 18.3 | 14.8 | 780 | 0.07 |
| Ridge | 13.9 | 4.5 | 31.2 | 22.6 | 6045 | 2.7 |
| Shoulder | 1.1 | 6.7 | 19.2 | 19.2 | 8376 | 3.8 |
| Spur | 19.5 | 8.7 | 29.1 | 23.3 | 15,992 | 7.4 |
| Slope | 53.0 | 45.0 | 70.8 | 63.3 | 83,032 | 37.7 |
| Hollow | 18.0 | 6.9 | 26.2 | 20.8 | 13,223 | 6.1 |
| Footslope | 1.6 | 12.2 | 23.1 | 20.5 | 14,461 | 6.7 |
| Valley | 14.1 | 3.8 | 28.6 | 20.2 | 5403 | 2.5 |
| Depression | 2.4 | 0.2 | 7.6 | 5.6 | 249 | 0.03 |
| Mean | 13.2 | 18.5 | 31.6 | 30.3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karlson, M.; Bastviken, D.; Reese, H. Error Characteristics of Pan-Arctic Digital Elevation Models and Elevation Derivatives in Northern Sweden. Remote Sens. 2021, 13, 4653. https://doi.org/10.3390/rs13224653
Karlson M, Bastviken D, Reese H. Error Characteristics of Pan-Arctic Digital Elevation Models and Elevation Derivatives in Northern Sweden. Remote Sensing. 2021; 13(22):4653. https://doi.org/10.3390/rs13224653
Chicago/Turabian StyleKarlson, Martin, David Bastviken, and Heather Reese. 2021. "Error Characteristics of Pan-Arctic Digital Elevation Models and Elevation Derivatives in Northern Sweden" Remote Sensing 13, no. 22: 4653. https://doi.org/10.3390/rs13224653
APA StyleKarlson, M., Bastviken, D., & Reese, H. (2021). Error Characteristics of Pan-Arctic Digital Elevation Models and Elevation Derivatives in Northern Sweden. Remote Sensing, 13(22), 4653. https://doi.org/10.3390/rs13224653