
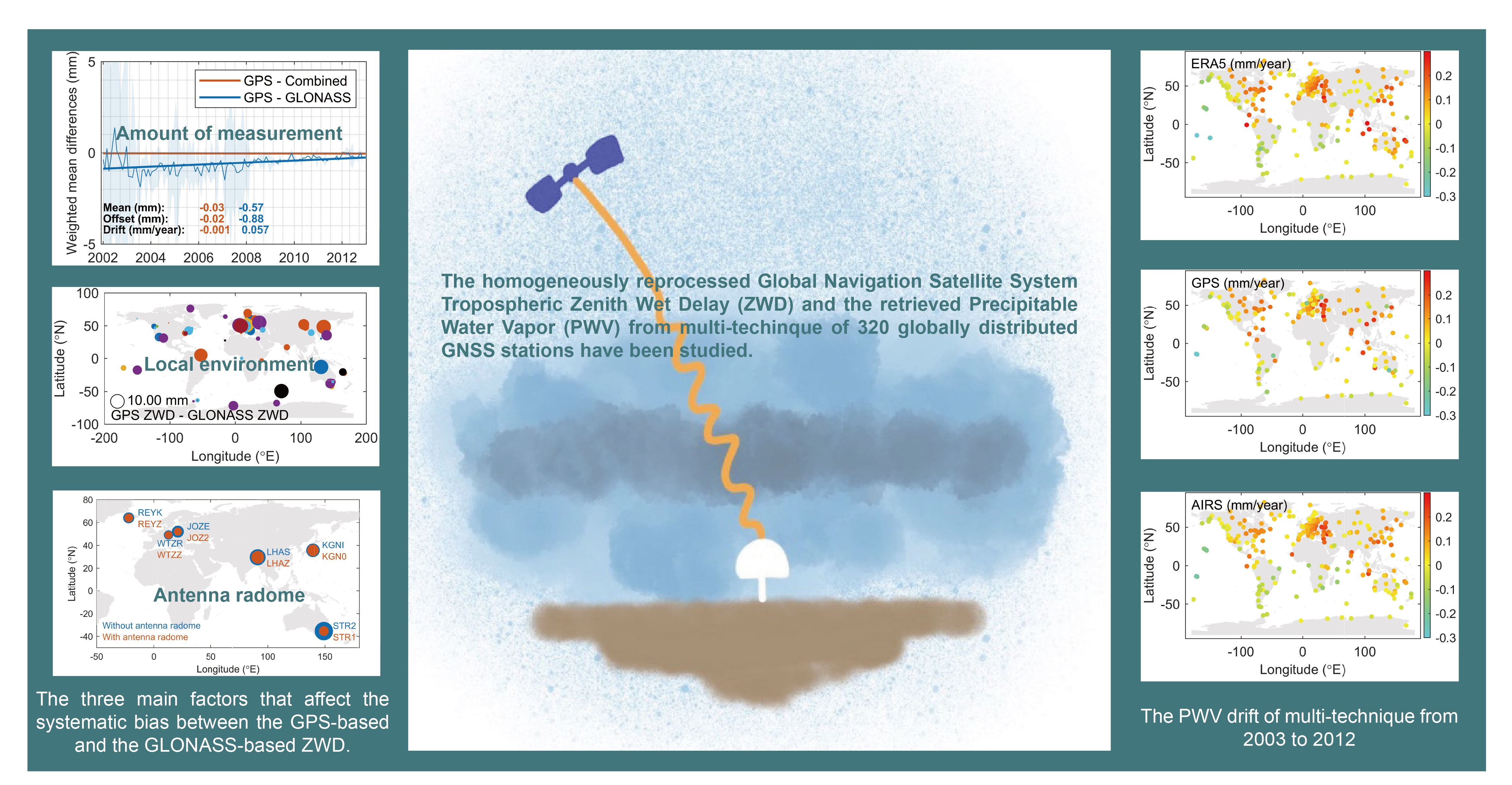
Evaluation of Precipitable Water Vapor Retrieval from Homogeneously Reprocessed Long-Term GNSS Tropospheric Zenith Wet Delay, and Multi-Technique


Abstract
:
1. Introduction
2. Data and Methods
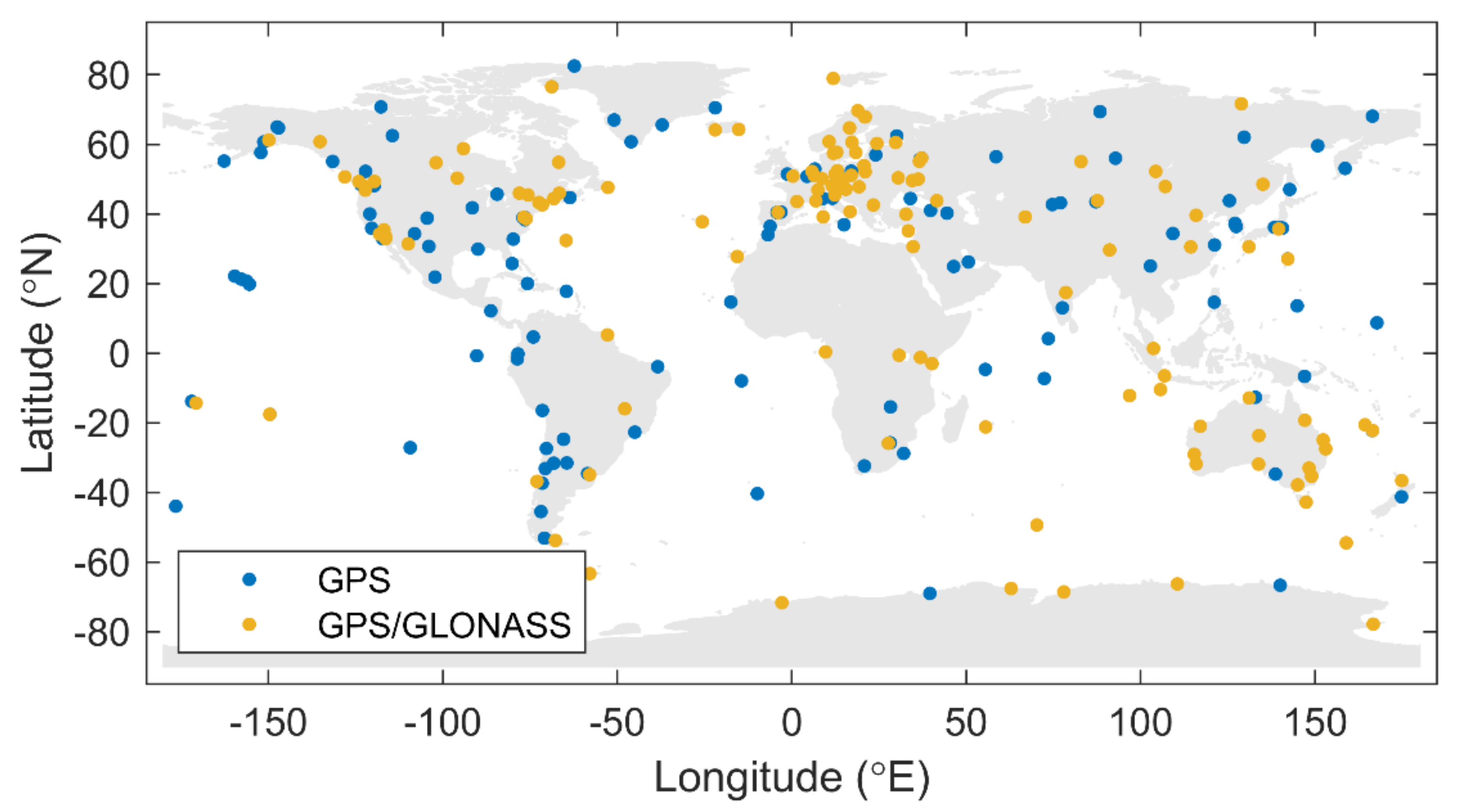
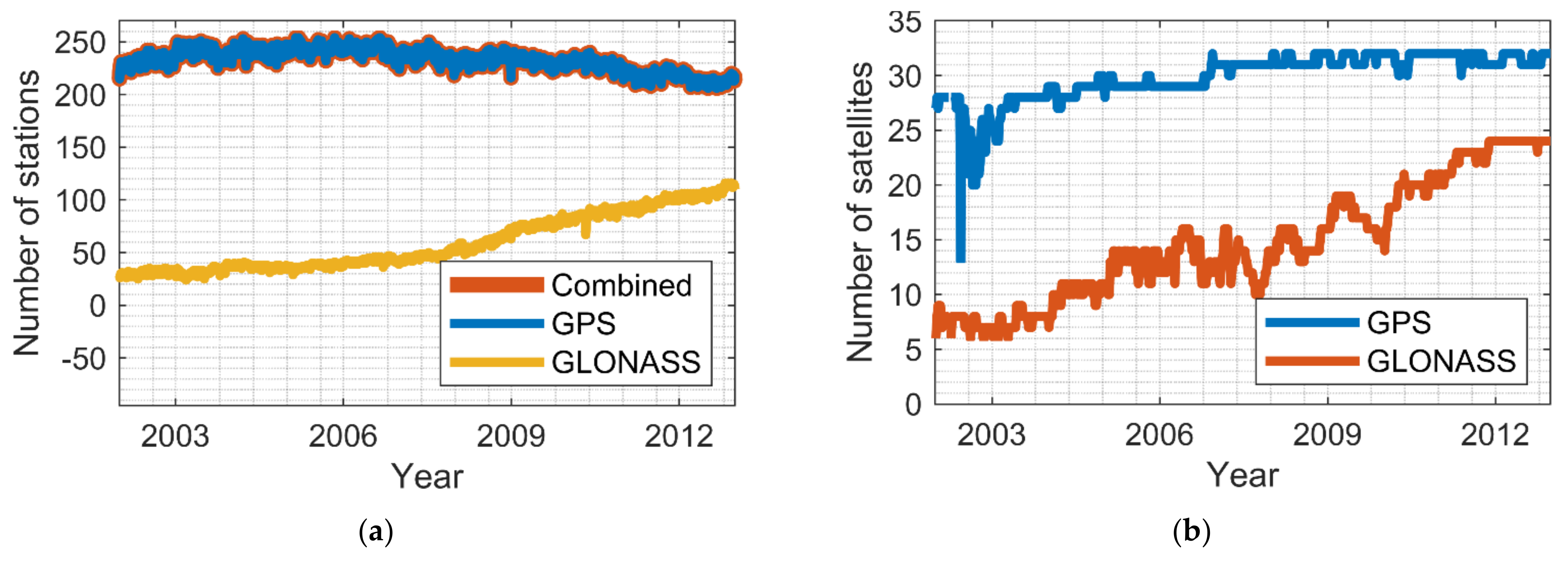
2.1. Multi-Technique and GNSS Data
- The spaceborne sensors, i.e., the MODIS infrared PWV products of the Aqua and Terra platform, and the AIRS level-2 products from the Aqua platform;
- The numerical weather model Integrated Water Vapor (IWV) products from the ERA5 and the ERA-Interim—IWV can be converted to PWV by dividing by the density of liquid water;
- The GNSS-based ZWDs.
2.2. GNSS PWV Retrieval Algorithm
3. Case Study of the GNSS-Based ZWDs
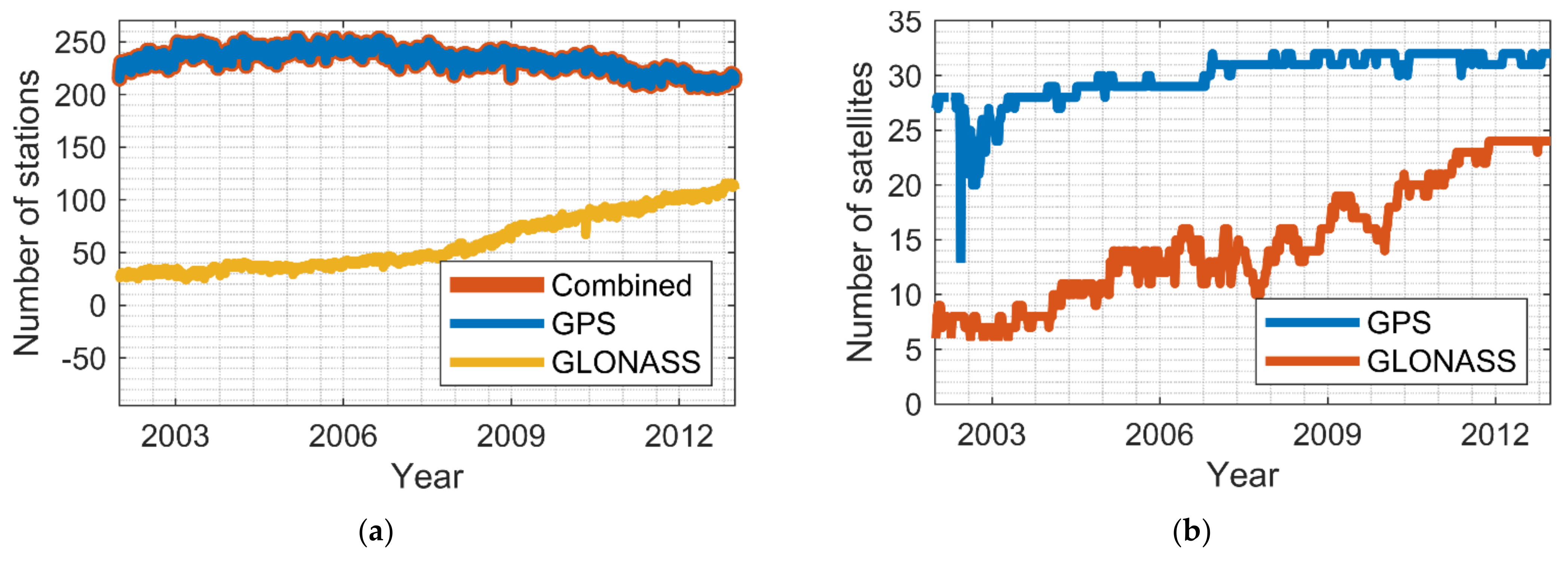
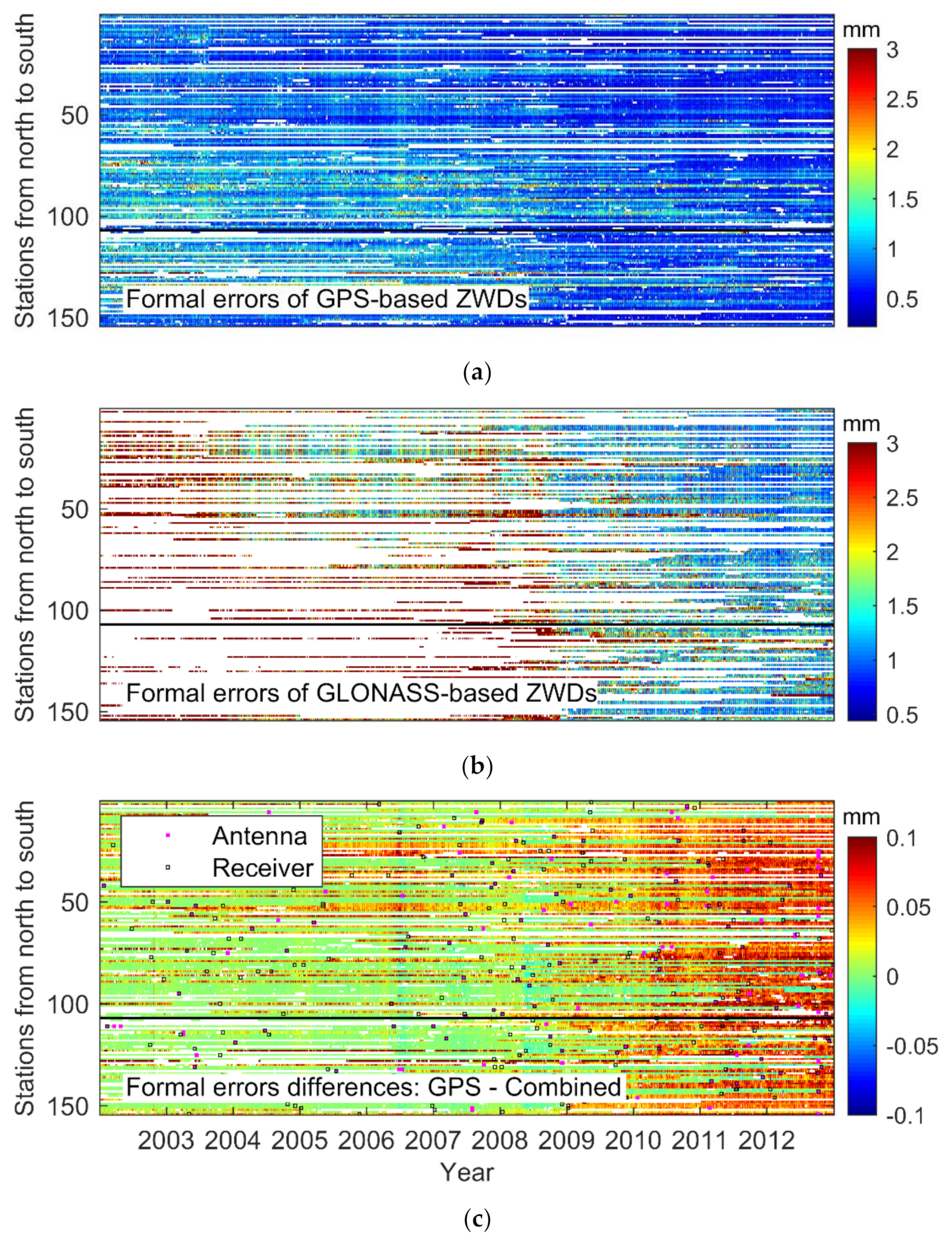
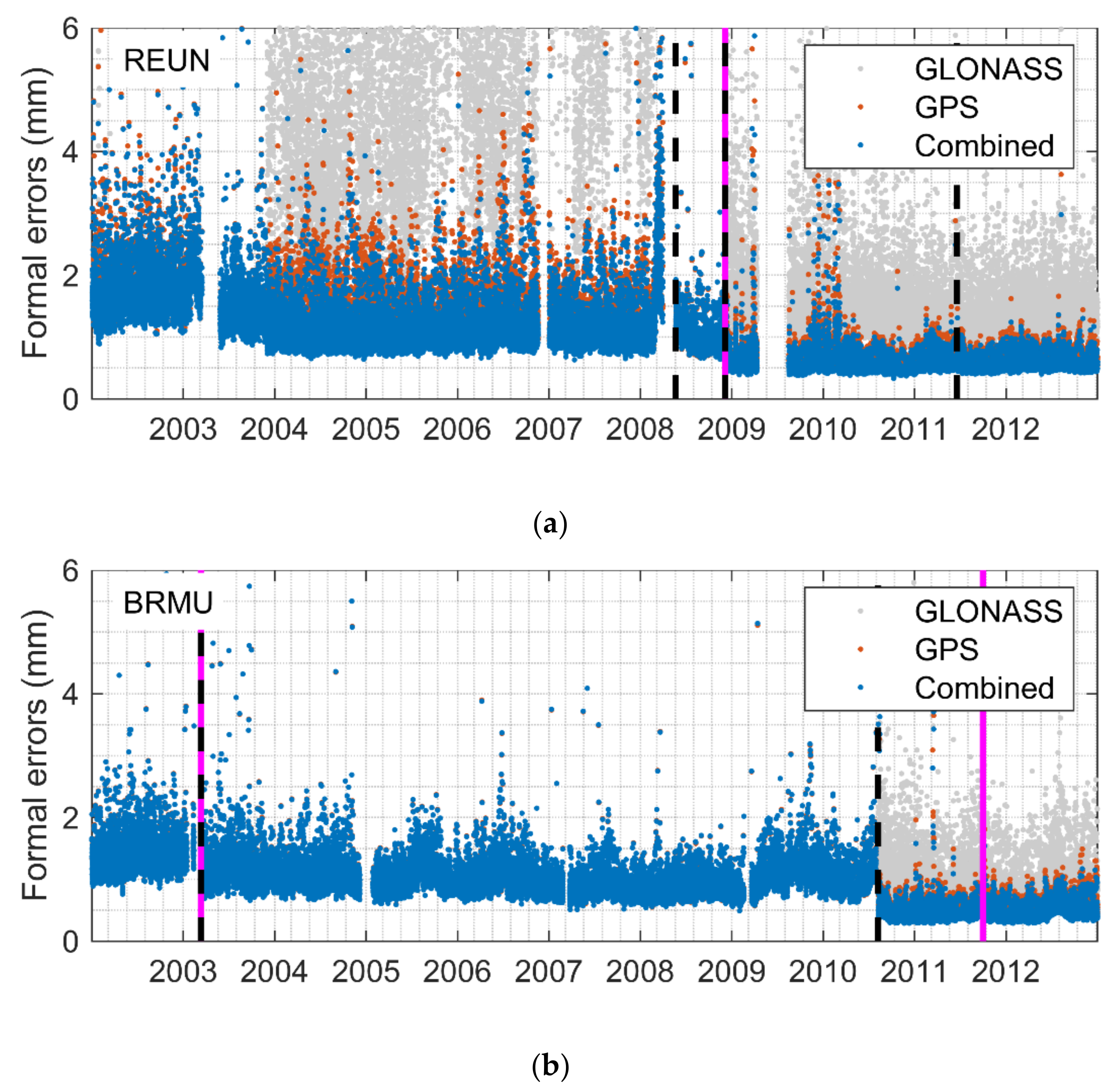
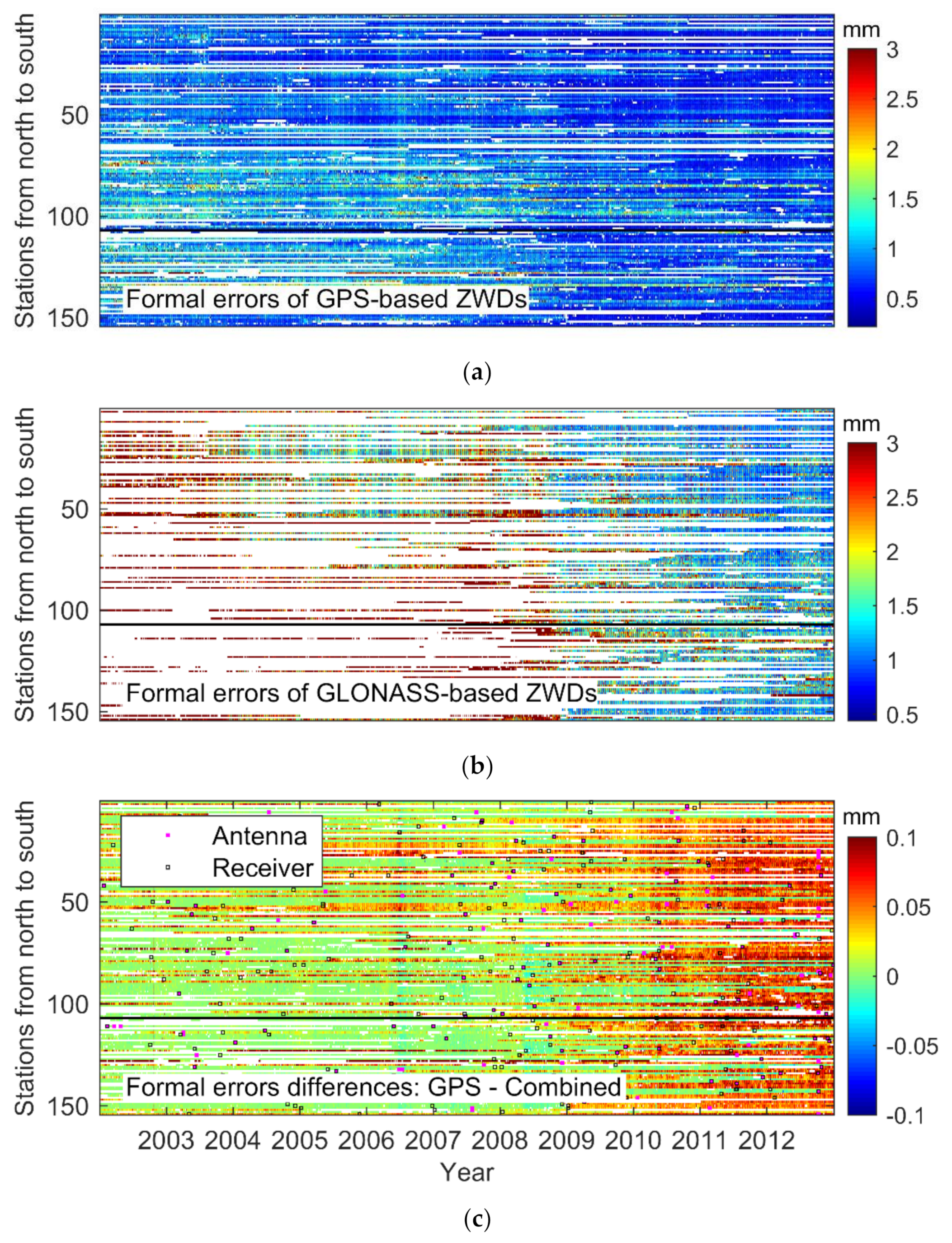
3.1. The Time Series
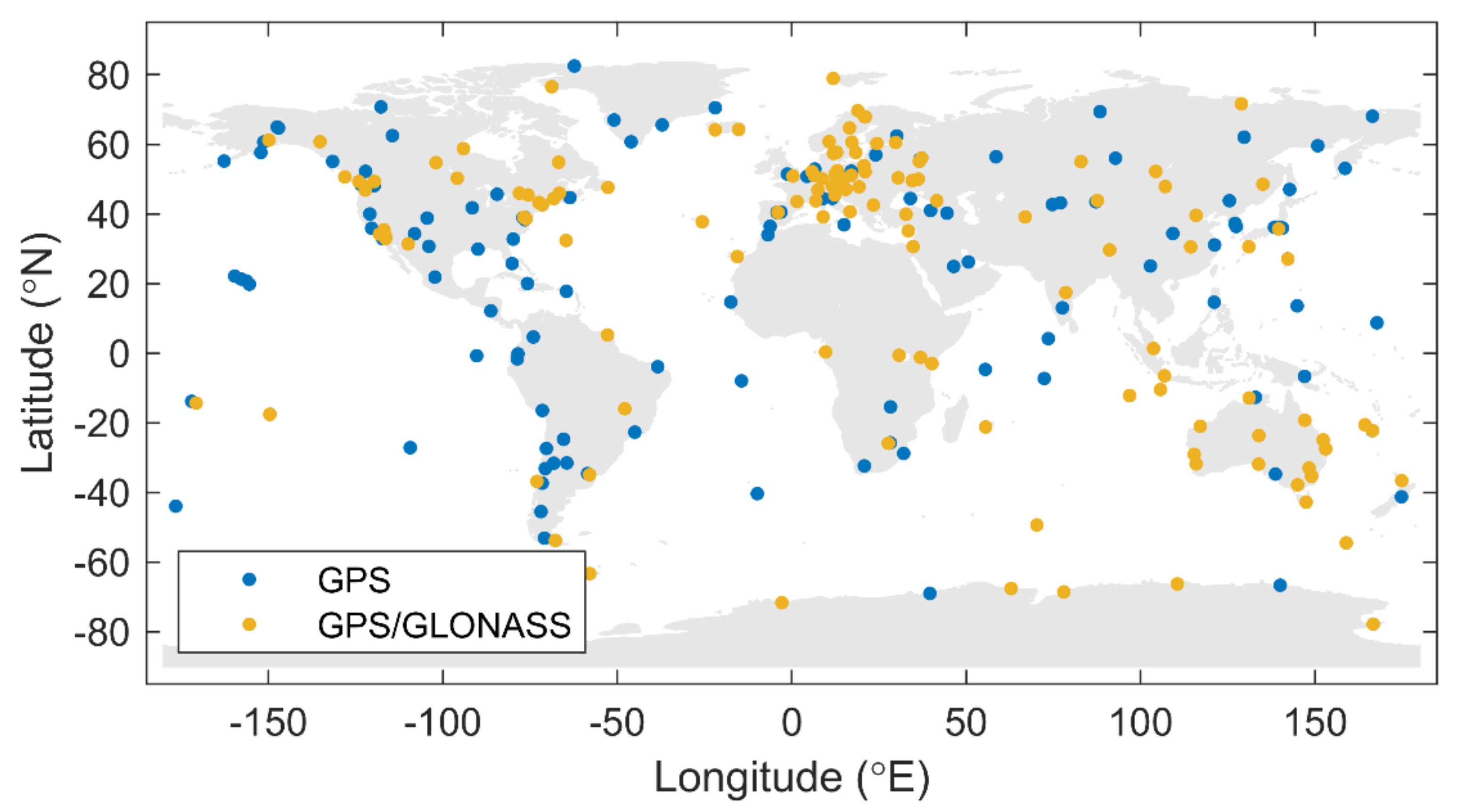
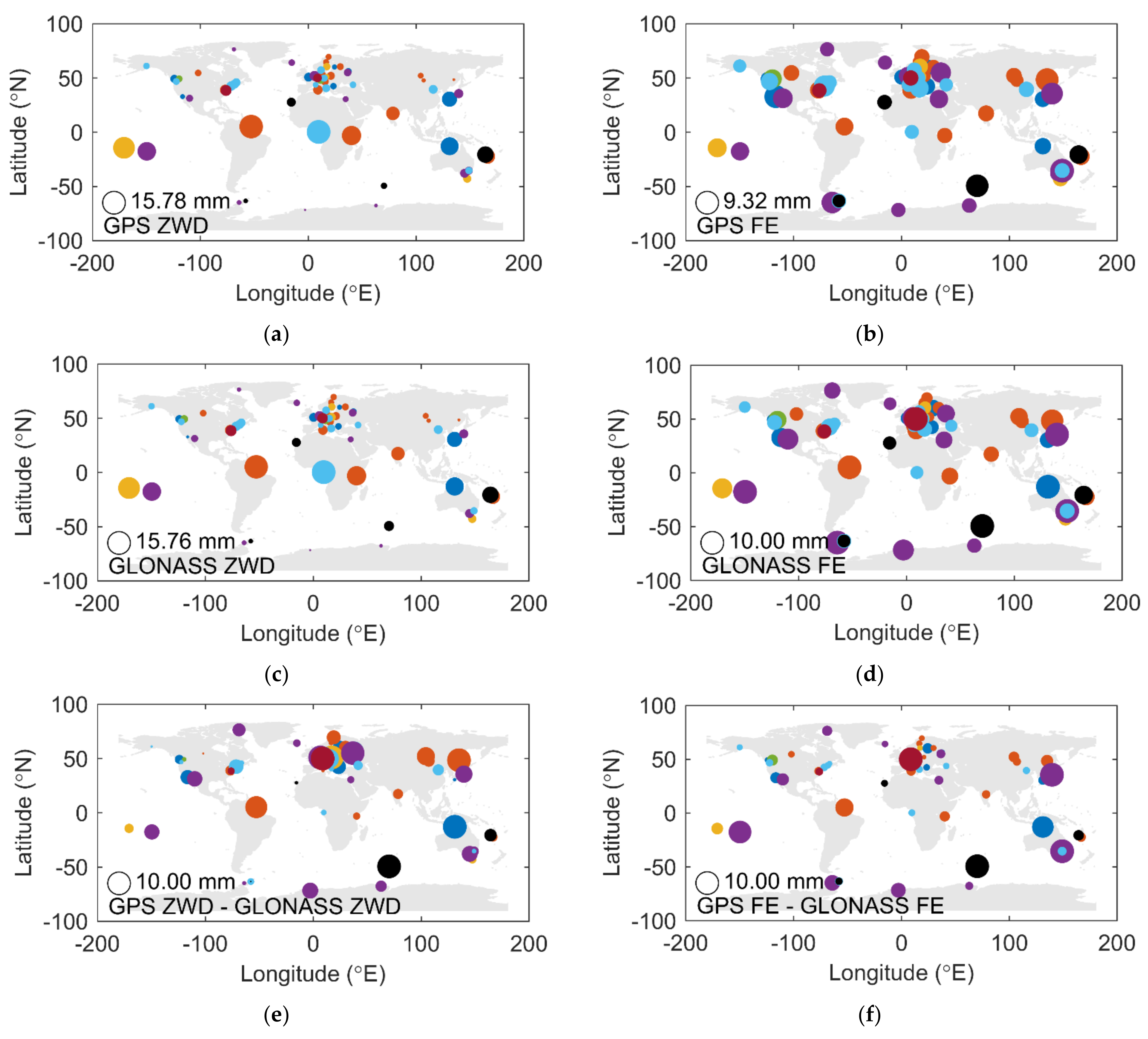
3.2. The Global Distribution
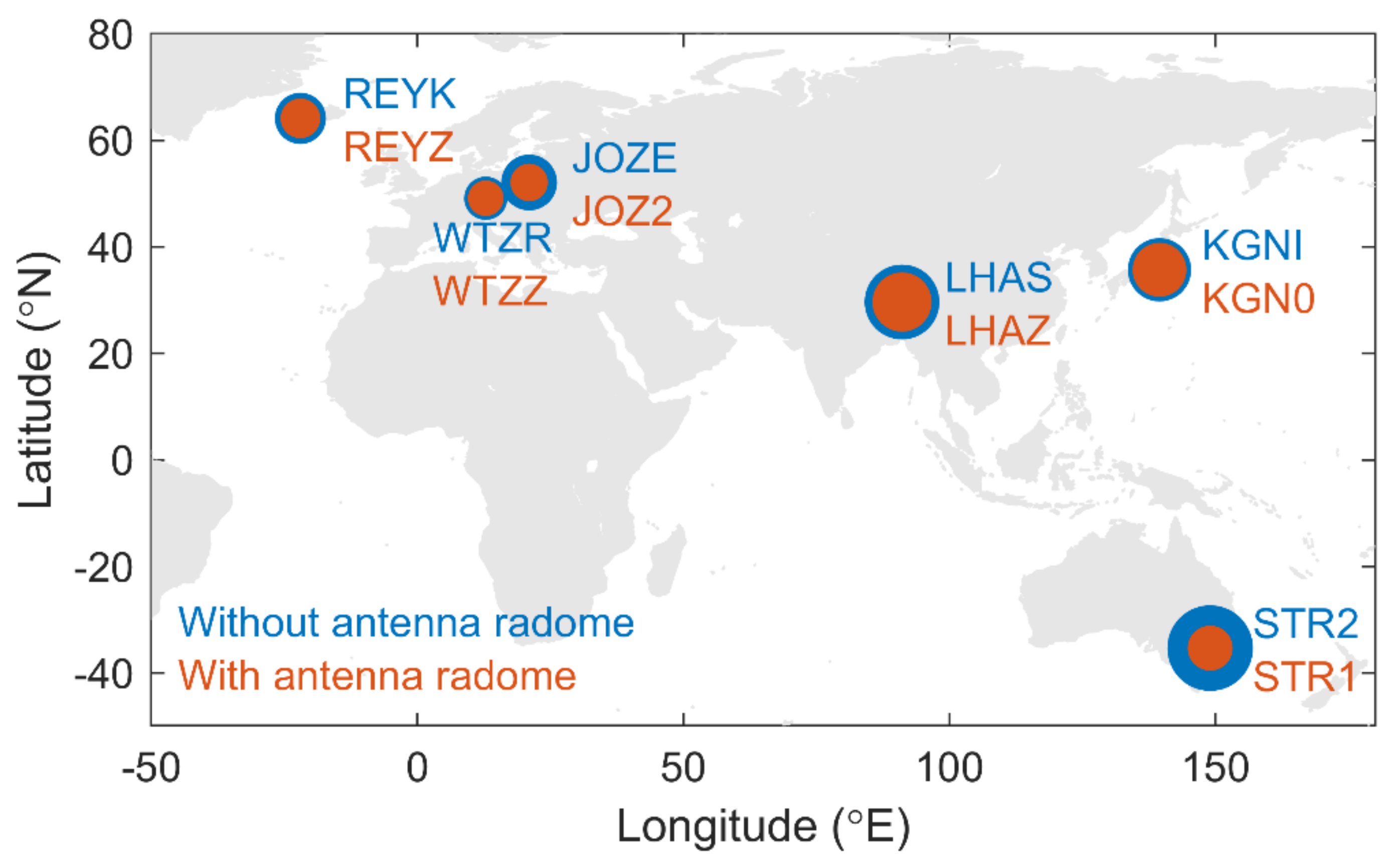
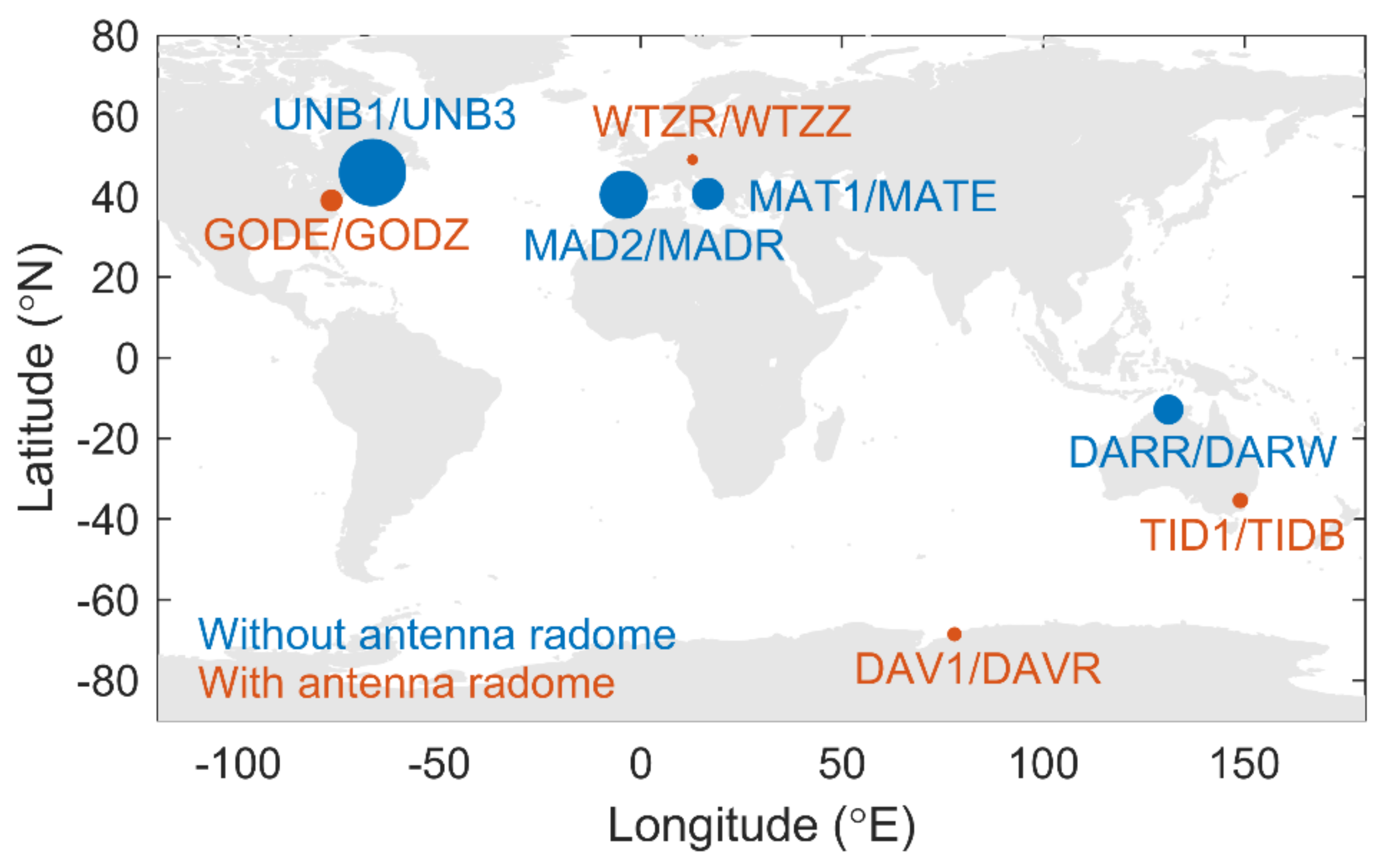
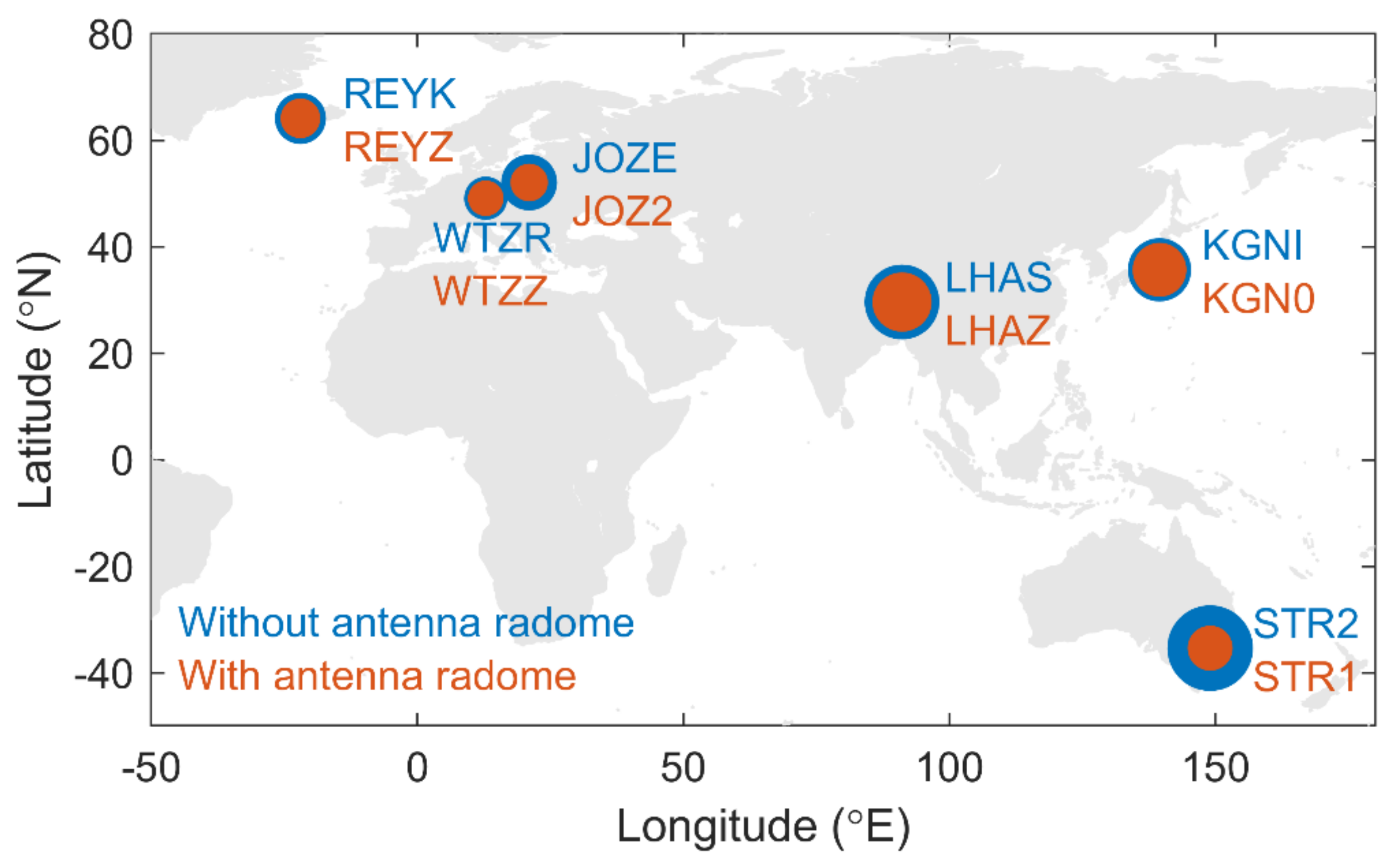
3.3. The Hardware Equipment—Antenna Radome
4. Evaluation of Consistency among Different Techniques
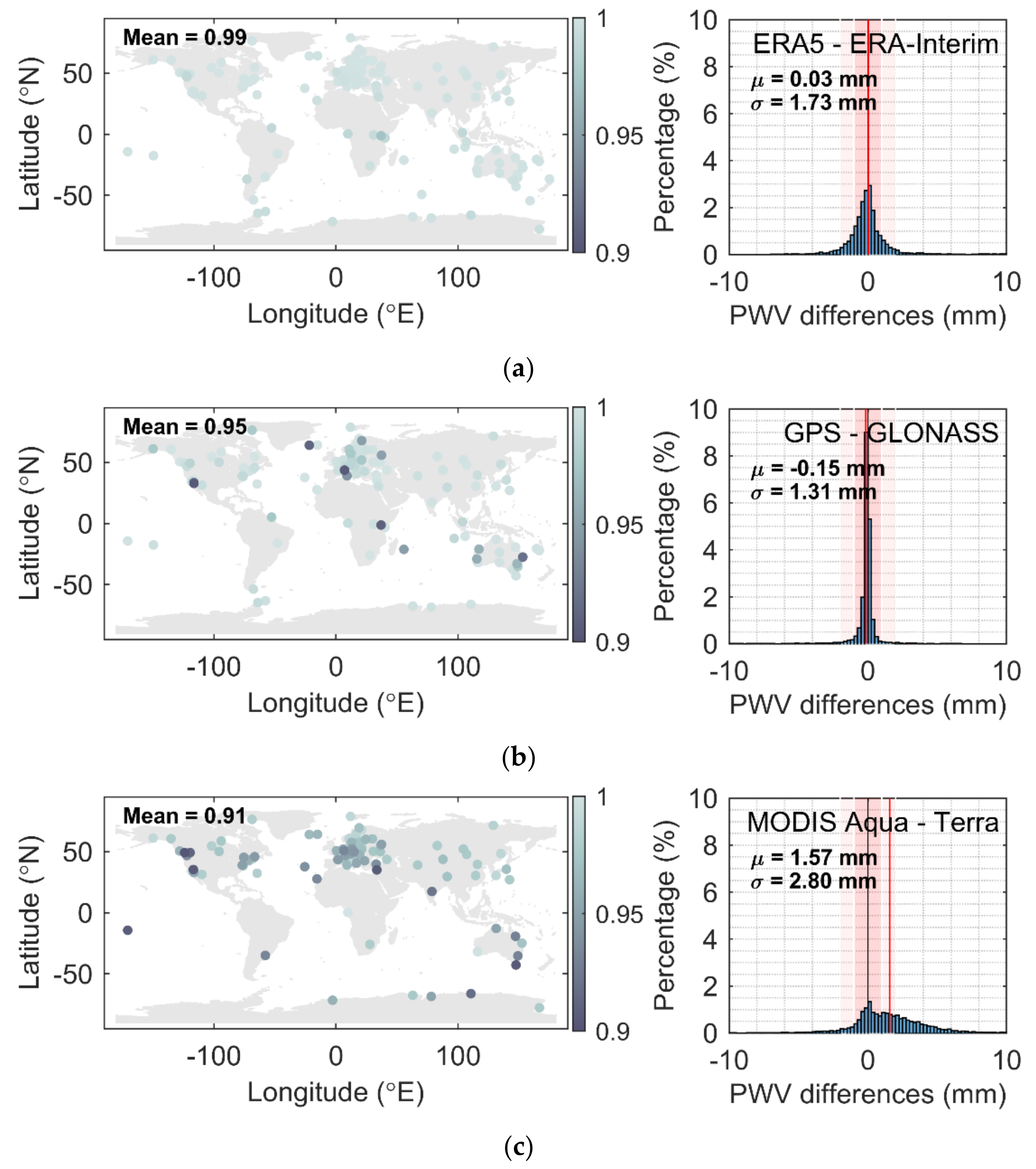
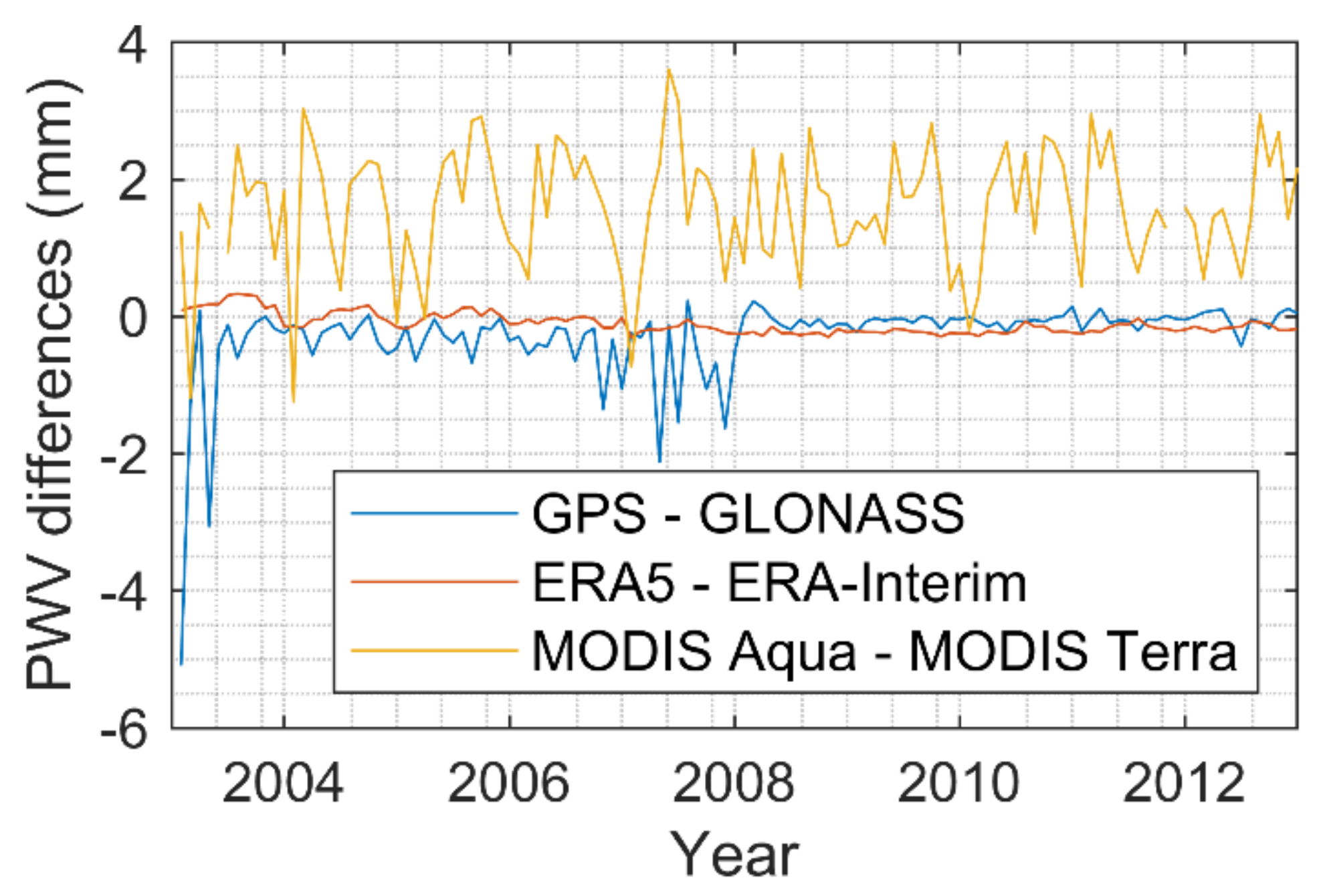
4.1. Intraconsistency Evaluation
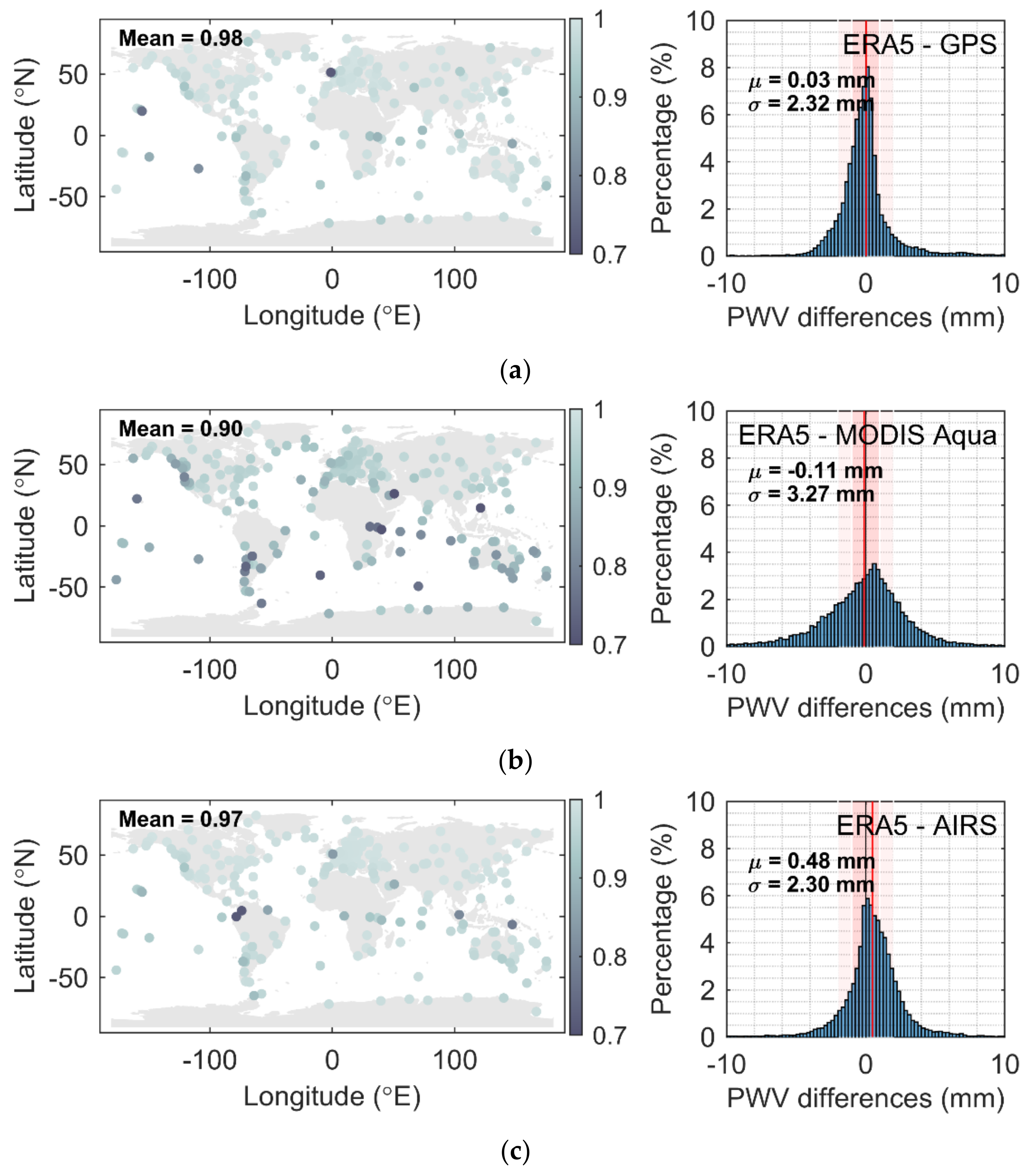
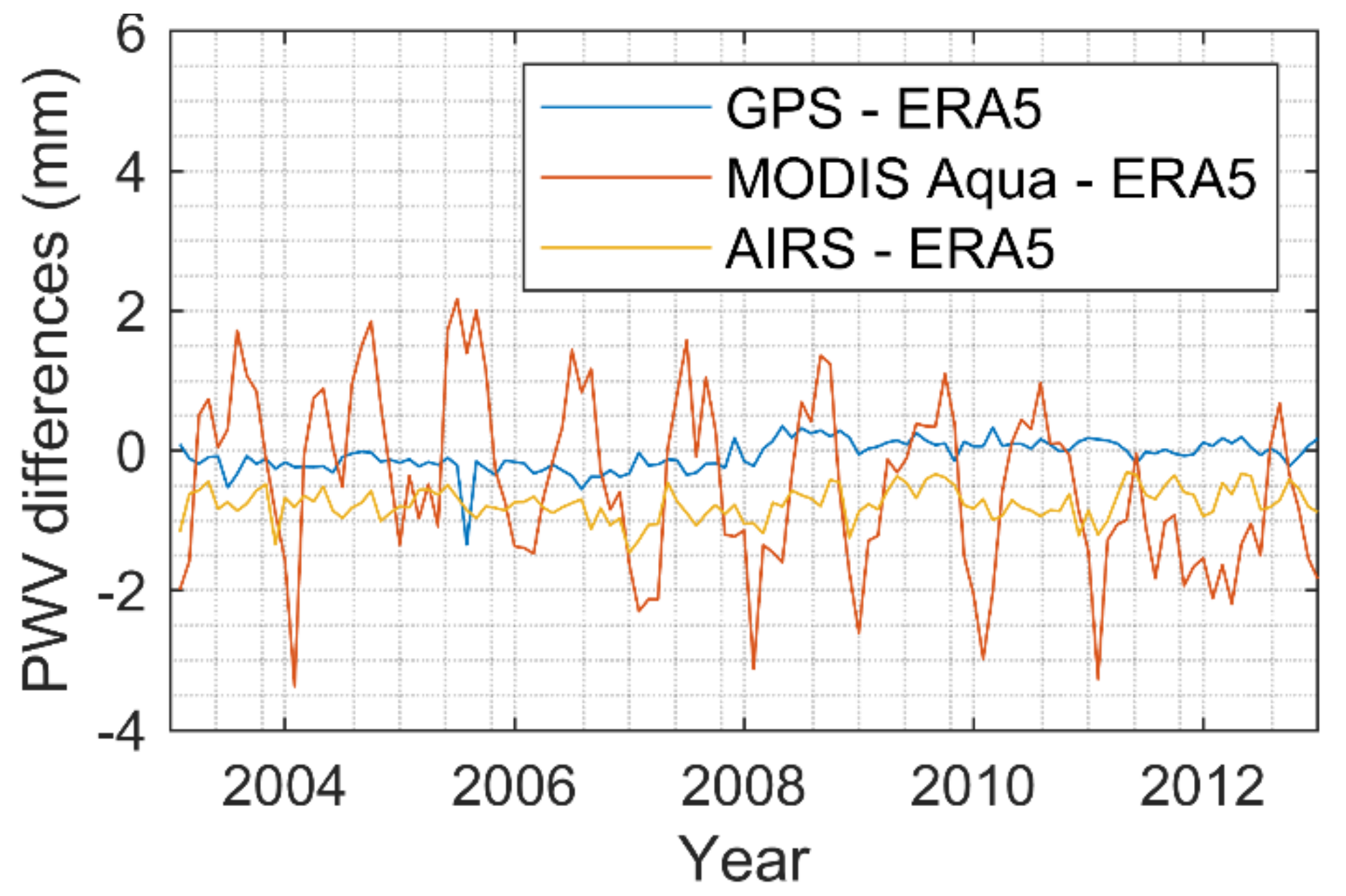
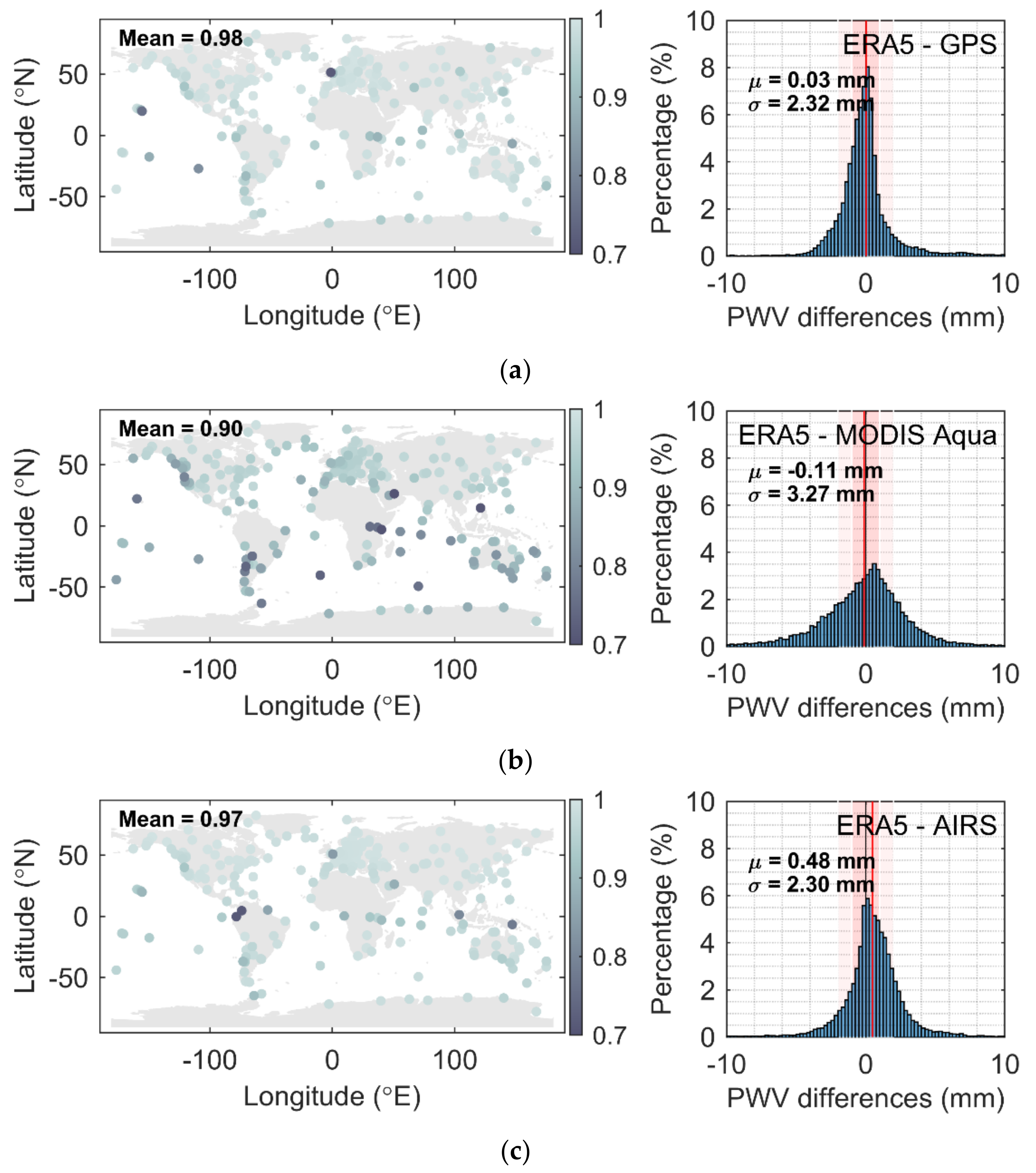
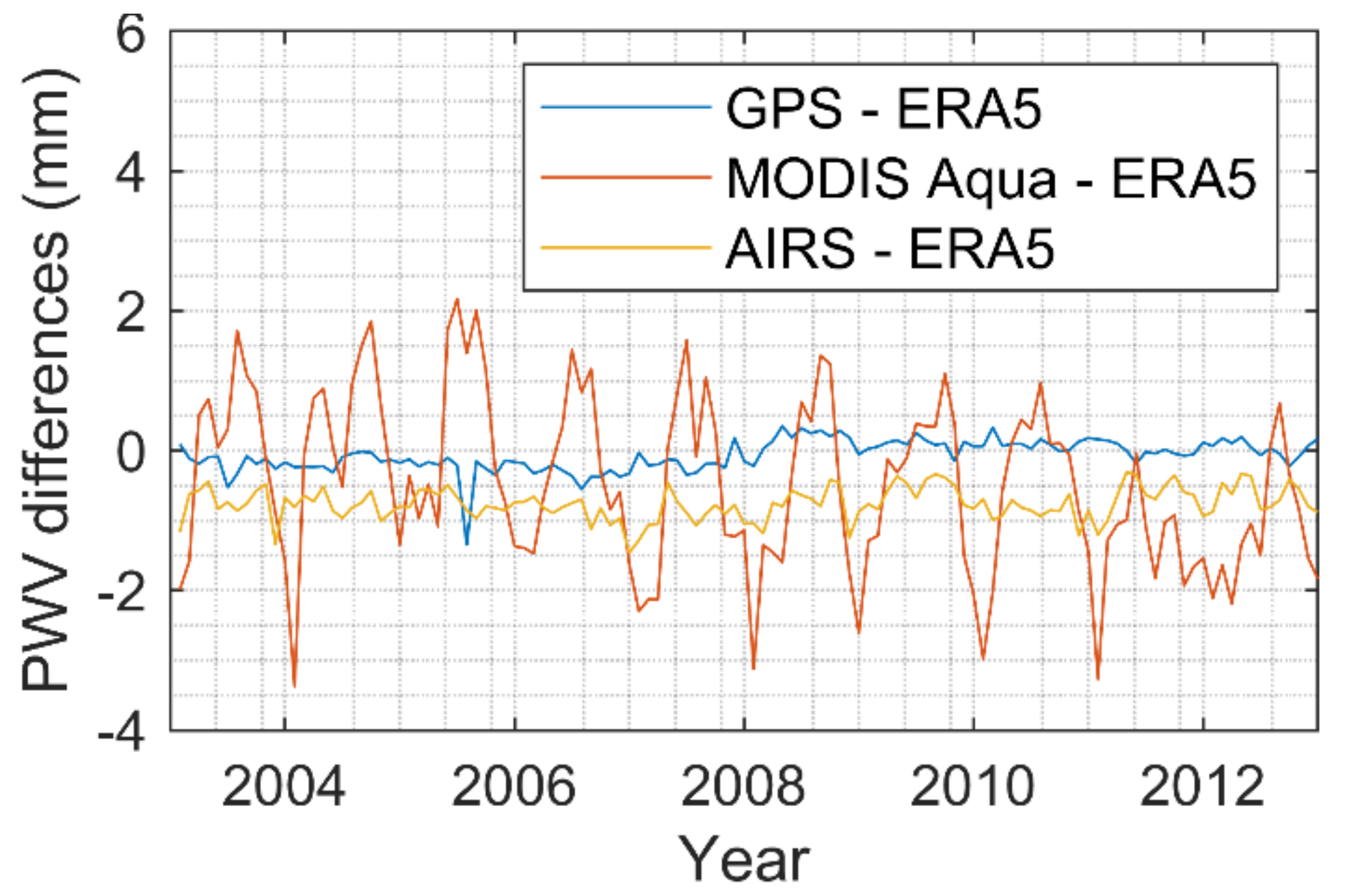
4.2. Interconsistency Evaluation
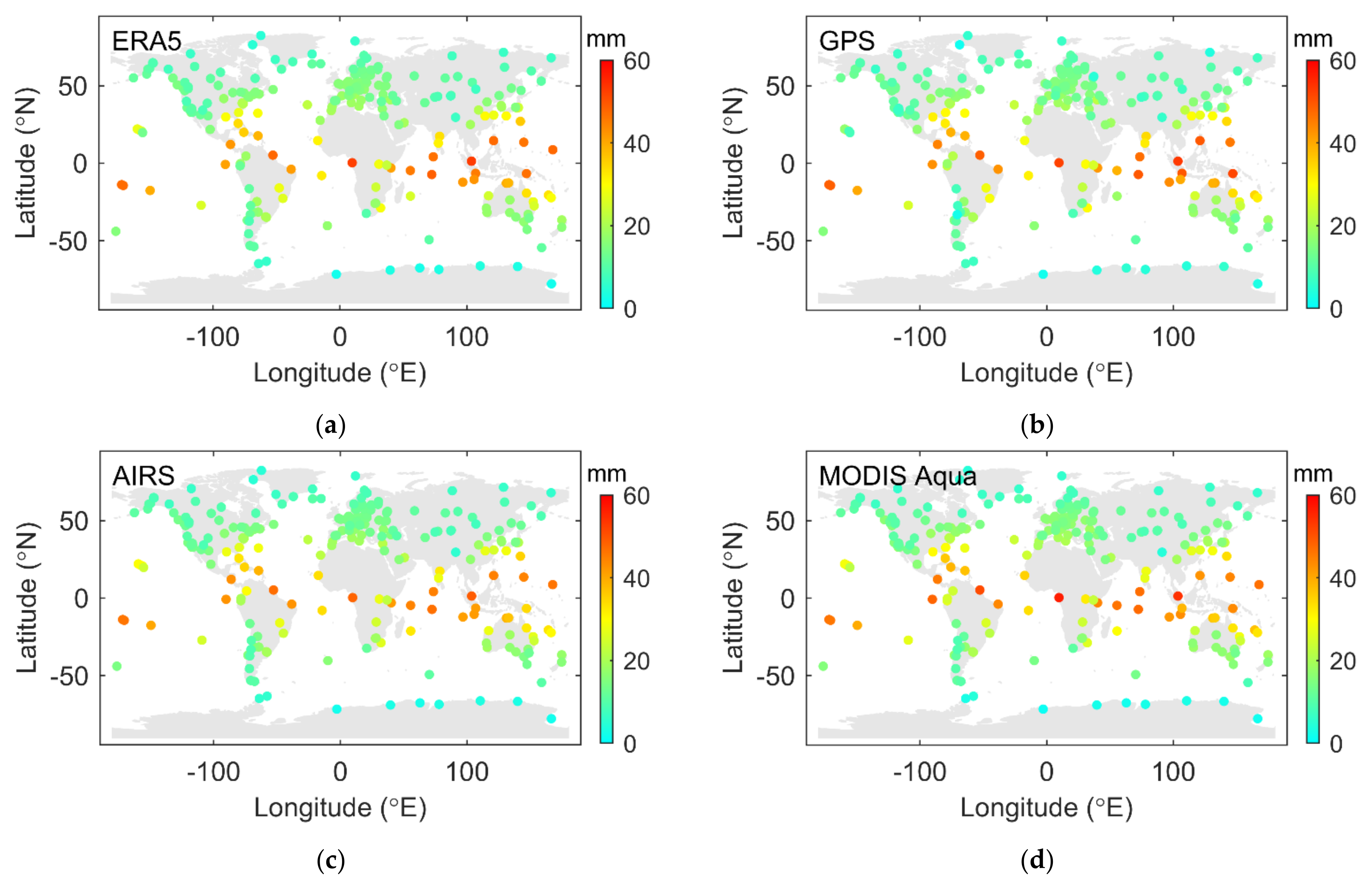
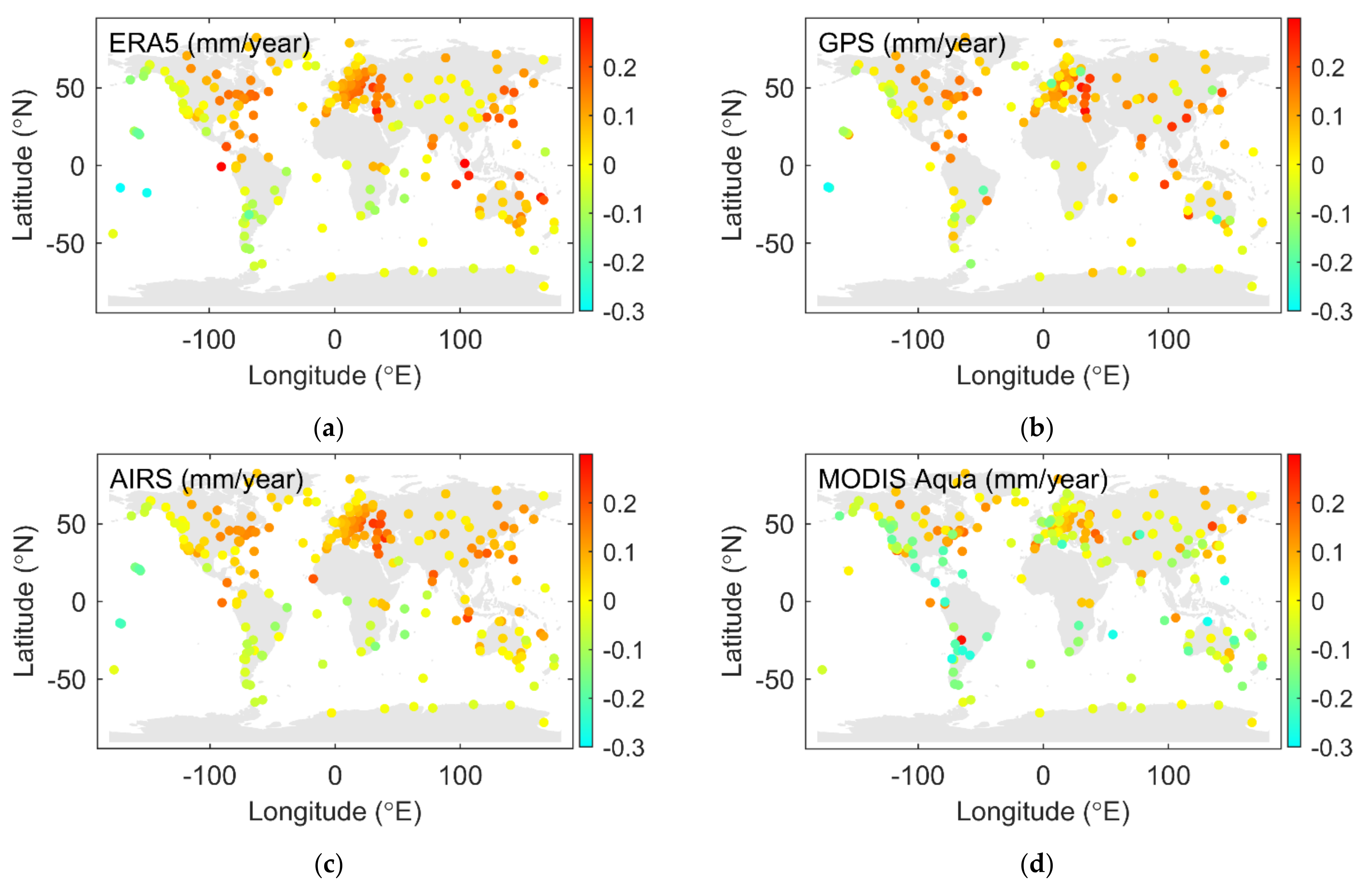
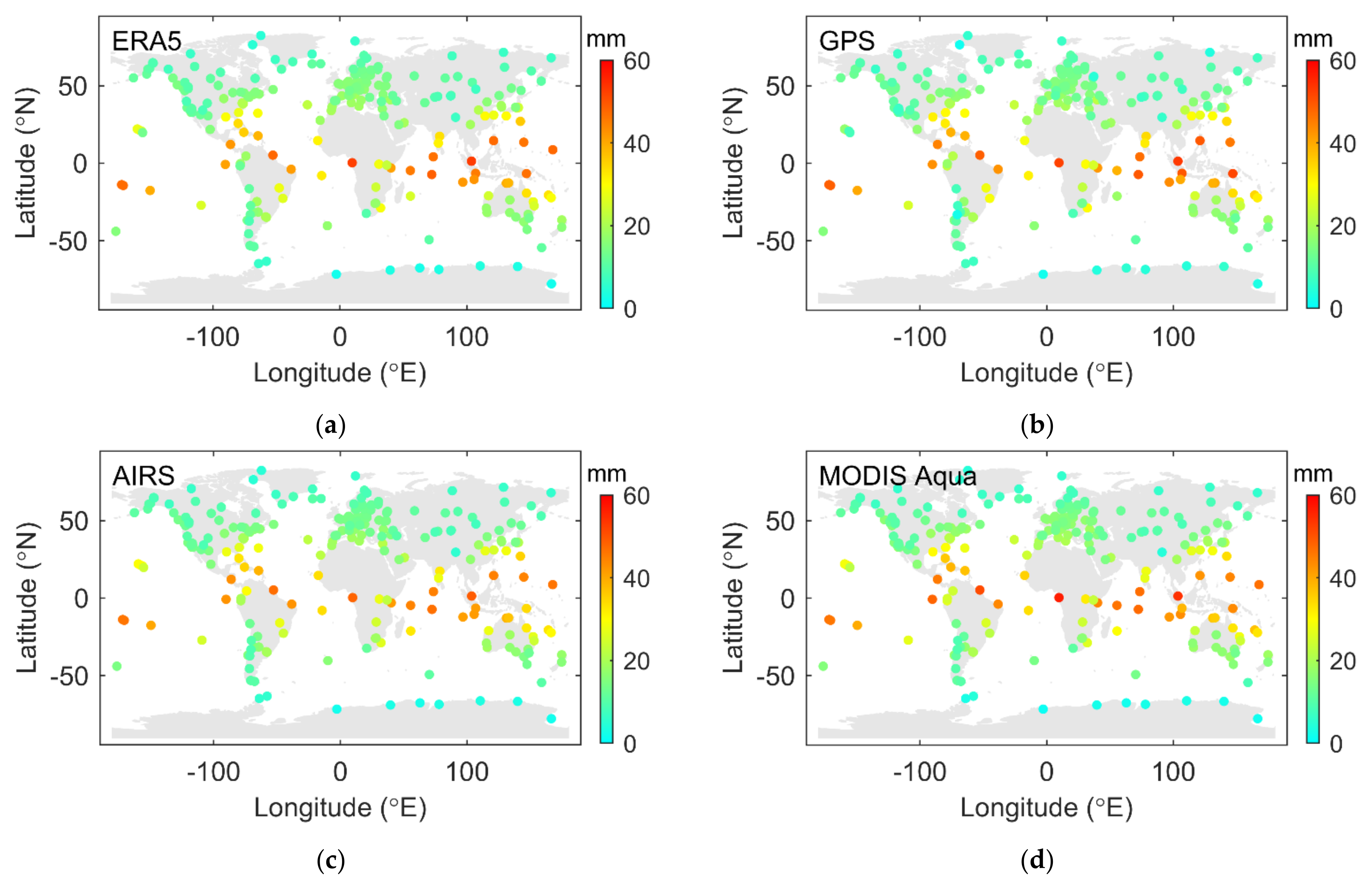
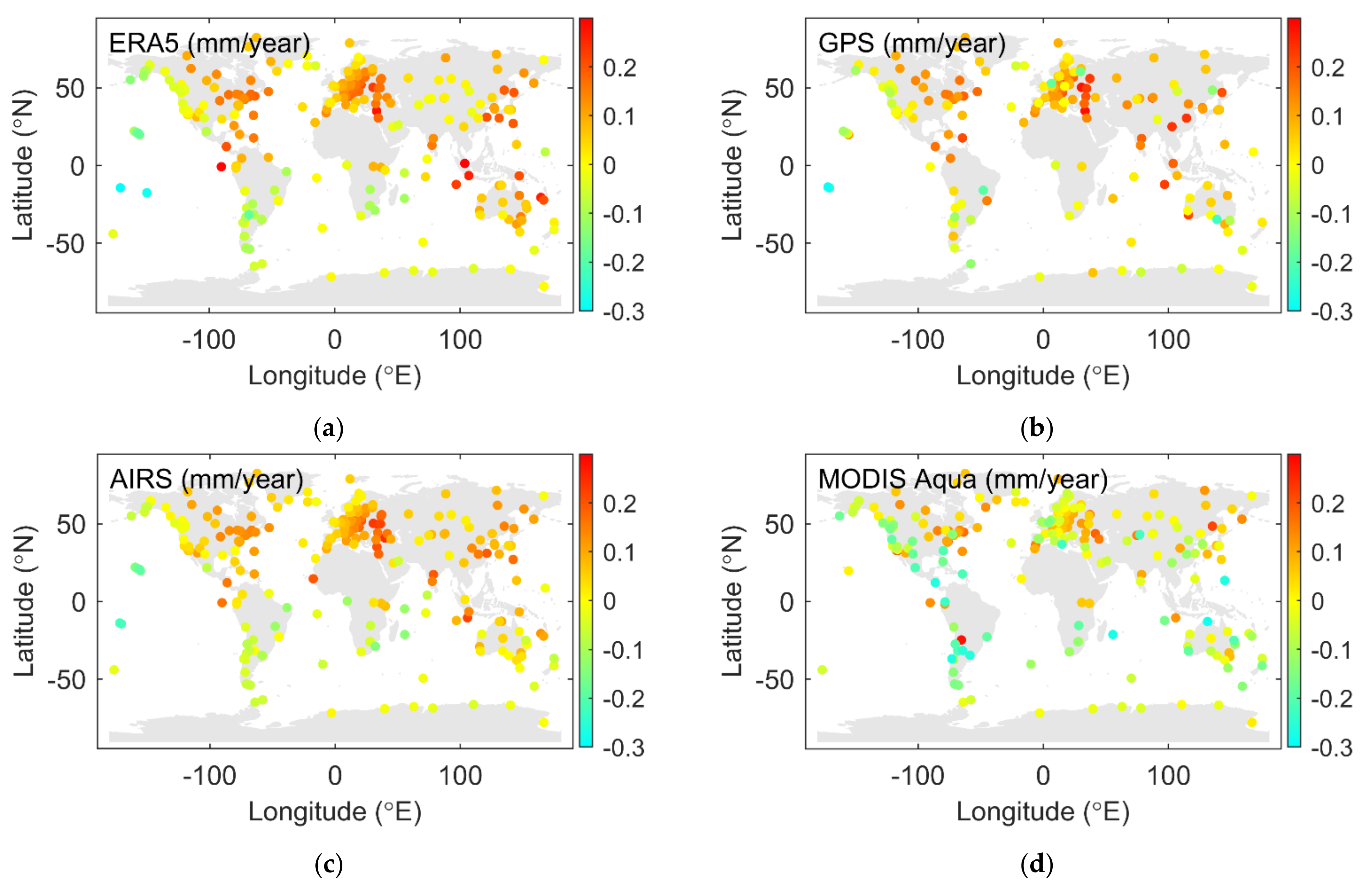
4.3. The Global Distribution of PWV and the PWV Drift
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Haeld, I.M.; Soden, B.J. Water vapor feedback and global warming. Annu. Rev. Energy Environ. 2000, 25, 441–475. [Google Scholar] [CrossRef] [Green Version]
- Minschwaner, K.; Dessler, A.E. Water vapor feedback in the tropical upper troposphere: Model results and observations. J. Clim. 2004, 17, 1272–1282. [Google Scholar] [CrossRef]
- Dessler, A.; Zhang, Z.; Yang, P. Water-vapor climate feedback inferred from climate uctuations, 2003–2008. Geophys. Res. Lett. 2008, 35, L20704. [Google Scholar] [CrossRef] [Green Version]
- Gradinarsky, L.; Johansson, J.; Bouma, H.; Scherneck, H.G.; Elgered, G. Climate monitoring using GPS. Phys. Chem. Earth Parts ABC 2002, 27, 335–340. [Google Scholar] [CrossRef]
- Elliott, W.P.; Gaffen, D.J. On the utility of radiosonde humidity archives for climate studies. Bull. Am. Meteorol. Soc. 1991, 72, 1507–1520. [Google Scholar] [CrossRef]
- Ross, R.J.; Elliott, W.P. Radiosonde-based northern hemisphere tropospheric water vapor trends. J. Clim. 2001, 14, 1602–1612. [Google Scholar] [CrossRef]
- Parkinson, C.L. Aqua: An earth-observing satellite mission to examine water and other climate variables. IEEE Trans. Geosci. Remote Sens. 2003, 41, 173–183. [Google Scholar] [CrossRef]
- Chang, L.; Gao, G.; Li, Y.; Zhang, Y.; Zhang, C.; Zhang, Y.; Feng, G. Variations in water vapor from AIRS and MODIS in response to Arctic sea ice change in December 2002–November 2016. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7395–7405. [Google Scholar] [CrossRef]
- Copernicus Climate Change Service (C3S). ERA5: Fifth Generation of ECMWF Atmospheric Reanalysis of the Global Climate. Copernicus Climate Change Service Climate Data Store (CDS). 2017. Available online: https://cds.climate.copernicus.eu/cdsapp#!/home (accessed on 21 March 2021).
- ECMWF—European Centre for Medium-Range Weather Forecasts. The ERA-Interim Reanalysis Dataset, Copernicus Climate Change Service (C3S). European Centre for Medium-Range Weather Forecast. 2011. Available online: https://www.ECMWF.int/en/forecasts/datasets/archive-datasets/reanalysis-datasets/era-interim (accessed on 3 October 2019).
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Resch, G. Water vapor radiometry in geodetic applications. In Geodetic Refraction; Springer: Cham, Switzerland, 1984; pp. 53–84. [Google Scholar]
- Beutler, G.; Rothacher, M.; Schaer, S.; Springer, T.; Kouba, J.; Neilan, R. The international GPS service (IGS): An interdisciplinary service in support of earth sciences. Adv. Space Res. 1999, 23, 631–653. [Google Scholar] [CrossRef]
- Davis, J.; Herring, T.; Shapiro, I.; Rogers, A.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Emardson, T.R.; Elgered, G.; Johansson, J.M. Three months of continuous monitoring of atmospheric water vapor with a network of global positioning system receivers. J. Geophys. Res. Atmos. 1998, 103, 1807–1820. [Google Scholar] [CrossRef]
- Zumberge, J.; Hein, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Böhm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-range Weather Forecasts operational analysis data. J. Geophys. Res. Solid Earth 2006, 111, B02406. [Google Scholar] [CrossRef]
- Douša, J.; Dick, G.; Kačmařík, M.; Brožková, R.; Zus, F.; Brenot, H.; Stoycheva, A.; Möller, G.; Kaplon, J. Benchmark campaign and case study episode in central europe for development and assessment of advanced GNSS tropospheric models and products. Atmos. Meas. Tech. 2016, 9, 2989–3008. [Google Scholar] [CrossRef] [Green Version]
- Klos, A.; Hunegnaw, A.; Teferle, F.N.; Abraha, K.E.; Ahmed, F.; Bogusz, J. Statistical significance of trends in zenith wet delay from re-processed GPS solutions. GPS Solut. 2018, 22, 51. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Jin, S.; Li, Z.; Cao, Y.; Ping, F.; Tang, X. High-precision GNSS PWV and its variation characteristics in China based on individual station meteorological data. Remote Sens. 2021, 13, 1296. [Google Scholar] [CrossRef]
- Wilgan, K.; Rohm, W.; Bosy, J. Multi-observation meteorological and GNSS data comparison with numerical weather prediction model. Atmos. Res. 2015, 156, 29–42. [Google Scholar] [CrossRef]
- Ning, T.; Wickert, J.; Deng, Z.; Heise, S.; Dick, G.; Vey, S.; Schöne, T. Homogenized time series of the atmospheric water vapor content obtained from the GNSS reprocessed data. J. Clim. 2016, 29, 2443–2456. [Google Scholar] [CrossRef]
- Gurbuz, G.; Jin, S. Long-time variations of precipitable water vapour estimated from GPS, MODIS and radiosonde observations in Turkey. Int. J. Climatol. 2017, 37, 5170–5180. [Google Scholar] [CrossRef]
- Shoji, Y.; Sato, K.; Yabuki, M.; Tsuda, T. Comparison of shipborne GNSS-derived precipitable water vapor with radiosonde in the western North Pacific and in the seas adjacent to Japan. EPS Earth Planets Space 2017, 69, 153. [Google Scholar] [CrossRef]
- Zhang, Y.; Cai, C.; Chen, B.; Dai, W. Consistency evaluation of precipitable water vapor derived from ERA5, ERA-Interim, GNSS, and radiosondes over China. Radio Sci. 2019, 54, 561–571. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Yao, W.; Zhang, S. GNSS-derived PWV and comparison with radiosonde and ECMWF ERA-Interim data over mainland China. J. Atmos. Sol. Terr. Phys. 2019, 182, 85–92. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, Z. Evaluating the accuracy of Jason-3 water vapor product using PWV data from global radiosonde and GNSS stations. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4008–4017. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, K.; Pan, Z.; Qin, J.; Chen, D.; Lin, C.; Chen, Y.; Tang, W.; Han, M.; Lu, N.; et al. Evaluation of precipitable water vapor from four satellite products and four reanalysis datasets against GPS measurements on the southern Tibetan plateau. J. Clim. 2017, 30, 5699–5713. [Google Scholar] [CrossRef]
- Alraddawi, D.; Sarkissian, A.; Keckhut, P.; Bock, O.; Noël, S.; Bekki, S.; Irbah, A.; Meftah, M.; Claud, C. Comparison of total water vapour content in the Arctic derived from GNSS, AIRS, MODIS and SCIAMACHY. Atmos. Meas. Tech. 2018, 11, 2949–2965. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xu, T.; Nie, W.; Jiang, C.; Yang, Y.; Fang, Z.; Li, M.; Zhang, Z. Evaluation of precipitable water vapor from five reanalysis products with ground-based GNSS observations. Remote Sens. 2020, 12, 1817. [Google Scholar] [CrossRef]
- Khaniani, A.S.; Nikraftar, Z.; Zakeri, S. Evaluation of MODIS Near-IR water vapor product over Iran using ground-based GPS measurements. Atmos. Res. 2020, 231, 104657. [Google Scholar] [CrossRef]
- Steigenberger, P.; Tesmer, V.; Krügel, M.; Thaller, D.; Schmid, R.; Vey, S.; Rothacher, M. Comparisons of homogeneously reprocessed GPS and VLBI long timeseries of troposphere zenith delays and gradients. J. Geod. 2007, 81, 503–514. [Google Scholar] [CrossRef]
- Fritsche, M.; Sośnica, K.; Rodríguez-Solano, C.J.; Steigenberger, P.; Wang, K.; Dietrich, R.; Dach, R.; Hugentobler, U.; Rothacher, M. Homogeneous reprocessing of GPS, GLONASS and SLR observations. J. Geod. 2014, 88, 625–642. [Google Scholar] [CrossRef]
- Rebischung, P.; Villiger, A.; Herring, T.; Moore, M. Preliminary results from the third IGS reprocessing campaign. In AGU Fall Meeting Abstracts; American Geophysical Union: San Francisco, CA, USA, 2019; Volume 2019, p. G11A-03. [Google Scholar]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef] [Green Version]
- Dach, R.; Schmid, R.; Schmitz, M.; Thaller, D.; Schaer, S.; Lutz, S.; Steigenberger, P.; Wübbena, G.; Beutler, G. Improved antenna phase center models for GLONASS. GPS Solut. 2011, 15, 49–65. [Google Scholar] [CrossRef]
- Schmid, R.; Mader, G.; Herring, T. From relative to absolute antenna phase center corrections. In Proceedings of the IGS Workshop and Symposium, Bern, Switzerland, 1–4 March 2004; Meindl, M., Ed.; Astronomical Institute, University of Bern: Bern, Switzerland, 2005; pp. 209–219. [Google Scholar]
- Chen, G.; Herring, T. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. Solid Earth 1997, 102, 20489–20502. [Google Scholar] [CrossRef]
- Scherneck, H.G. A parametrized solid earth tide model and ocean tide loading effects for global geodetic baseline measurements. Geophys. J. Int. 1991, 106, 677–694. [Google Scholar] [CrossRef] [Green Version]
- Mathews, P.; Buffett, B.; Shapiro, I. Love numbers for a rotating spheroidal earth new definitions and numerical values. Geophys. Res. Lett. 1995, 22, 579–582. [Google Scholar] [CrossRef]
- Wahr, J.M. Deformation induced by polar motion. J. Geophys. Res. Solid Earth 1985, 90, 9363–9368. [Google Scholar] [CrossRef]
- Farrell, W. Deformation of the earth by surface loads. Rev. Geophys. 1972, 10, 761–797. [Google Scholar] [CrossRef]
- Rabbel, W.; Zschau, J. Static deformations and gravity changes at the earth’s surface due to atmospheric loading. J. Geophys. 1985, 56, 81–89. [Google Scholar]
- McCarthy, D.D.; Petit, G.; International Earth Rotation and Reference Systems Service (IERS). IERS Conventions (2003); Technical Report No. 32; International Earth Rotation and Reference Systems Service: Frankfurt am Main, Germany, 2004. [Google Scholar]
- Rothacher, M. Estimation of station heights with GPS. In Vertical Reference Systems; Drewes, H., Dodson., A.H., Fortes, L.P.S., Sánchez, L., Sandoval, P., Eds.; Springer: Berlin, Germany, 2002. [Google Scholar]
- Steigenberger, P.; Rothacher, M.; Dietrich, R.; Fritsche, M.; Rülke, A.; Vey, S. Reprocessing of a global GPS network. J. Geophys. Res. Solid Earth 2006, 111, B05402. [Google Scholar] [CrossRef] [Green Version]
- Askne, J.; Nordius, H. Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Mendes, V.; Prates, G.; Santos, L.; Langley, R. An evaluation of the accuracy of models for the determination of the weighted mean temperature of the atmosphere. In Proceedings of the 2000 National Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2000; pp. 433–438. [Google Scholar]
- Schüler, T. On ground-Based GPS Tropospheric Delay Estimation. Ph.D. Thesis, Universtät der Bundeswehr München, Neubiberg, Germany, February 2001. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Station | Antenna Type | Lat. (°) | Lon. (°) | Height (m) | Formal Error (mm) | |
|---|---|---|---|---|---|---|---|
| 1 | Poland | JOZE | TRM14532.00 NONE | 52.10 | 21.03 | 141.44 | 1.14 ± 0.22 |
| JOZ2 | ASH701941.B SNOW | 52.10 | 21.03 | 152.52 | 0.7 ± 0.15 | ||
| 2 | Japan | KGNI | ASH700228A NONE | 35.71 | 139.49 | 123.53 | 1.32 ± 0.31 |
| KGN0 | ASH701933A_M SCIS | 35.71 | 139.49 | 128.89 | 1.1 ± 0.19 | ||
| 3 | China | LHAS | AOAD/M_T NONE | 29.66 | 91.10 | 3624.66 | 1.59 ± 0.60 |
| LHAZ | ASH701941.B SNOW | 29.66 | 91.10 | 3624.60 | 1.22 ± 0.41 | ||
| 4 | Iceland | REYK | AOAD/M_T NONE | 64.14 | −21.96 | 93.03 | 1.03 ± 1.23 |
| REYZ | ASH701073.1 SNOW | 64.14 | −21.96 | 93.04 | 0.75 ± 0.29 | ||
| 5 | Australia | STR2 | JPSREGANT_DD_E1 NONE | −35.32 | 149.01 | 802.47 | 1.85 ± 0.54 |
| STR1 | AOAD/M_T DOME | −35.32 | 149.01 | 799.93 | 0.88 ± 0.14 | ||
| 6 | Germany | WTZR | AOAD/M_T NONE | 49.14 | 12.88 | 666.01 | 0.84 ± 0.43 |
| WTZZ | ASH701073.1 SNOW | 49.14 | 12.88 | 665.89 | 0.65 ± 0.23 |
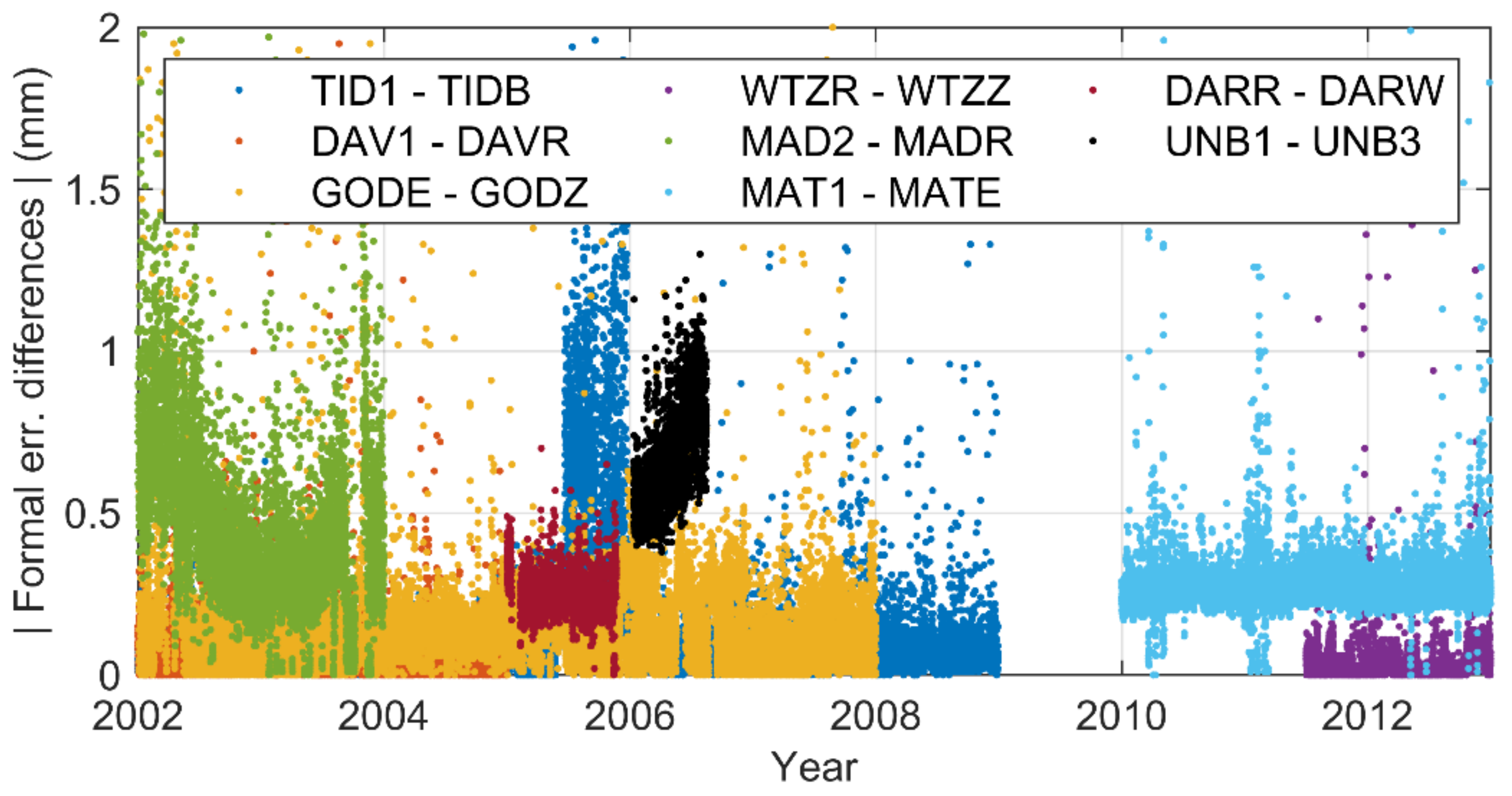
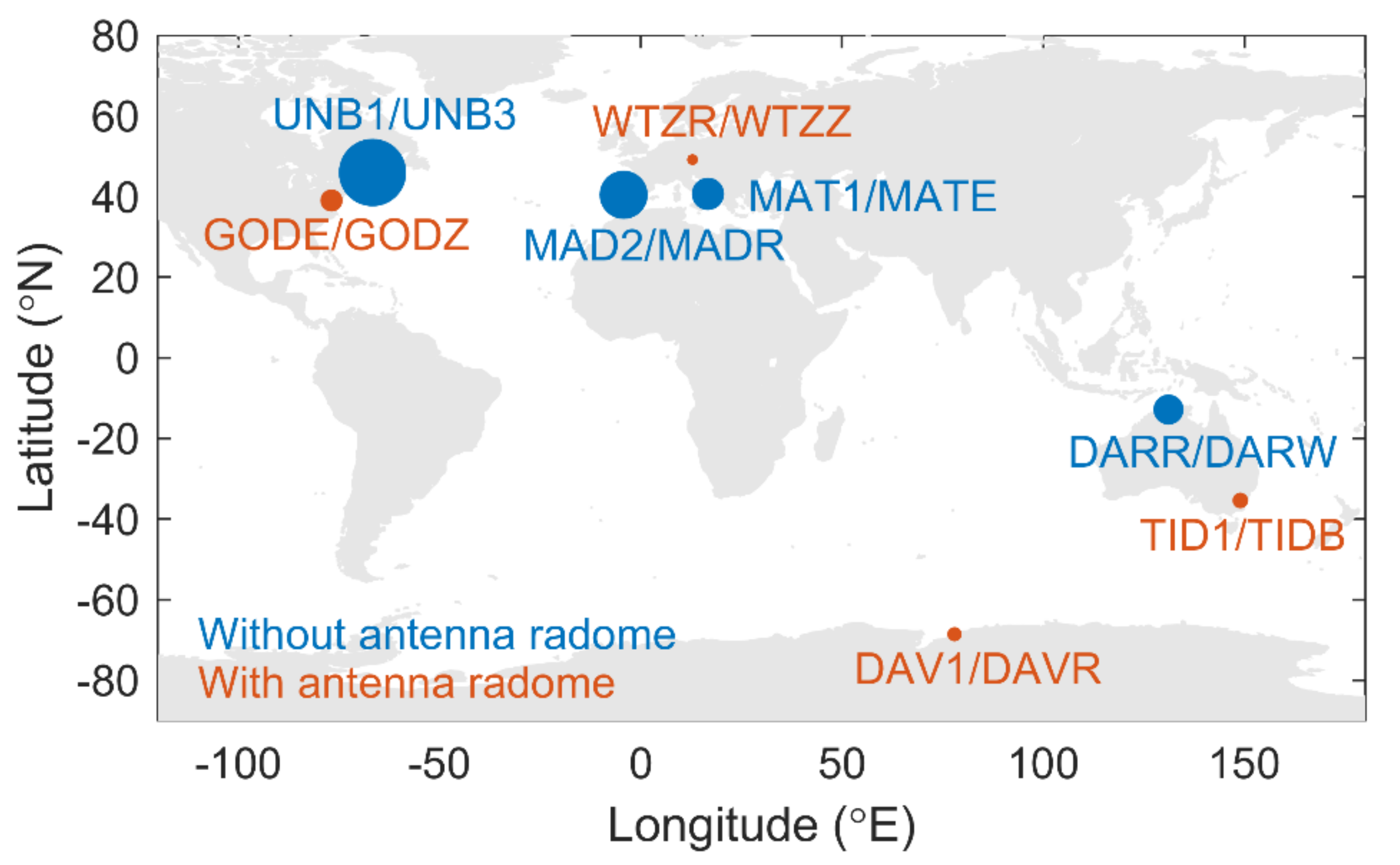
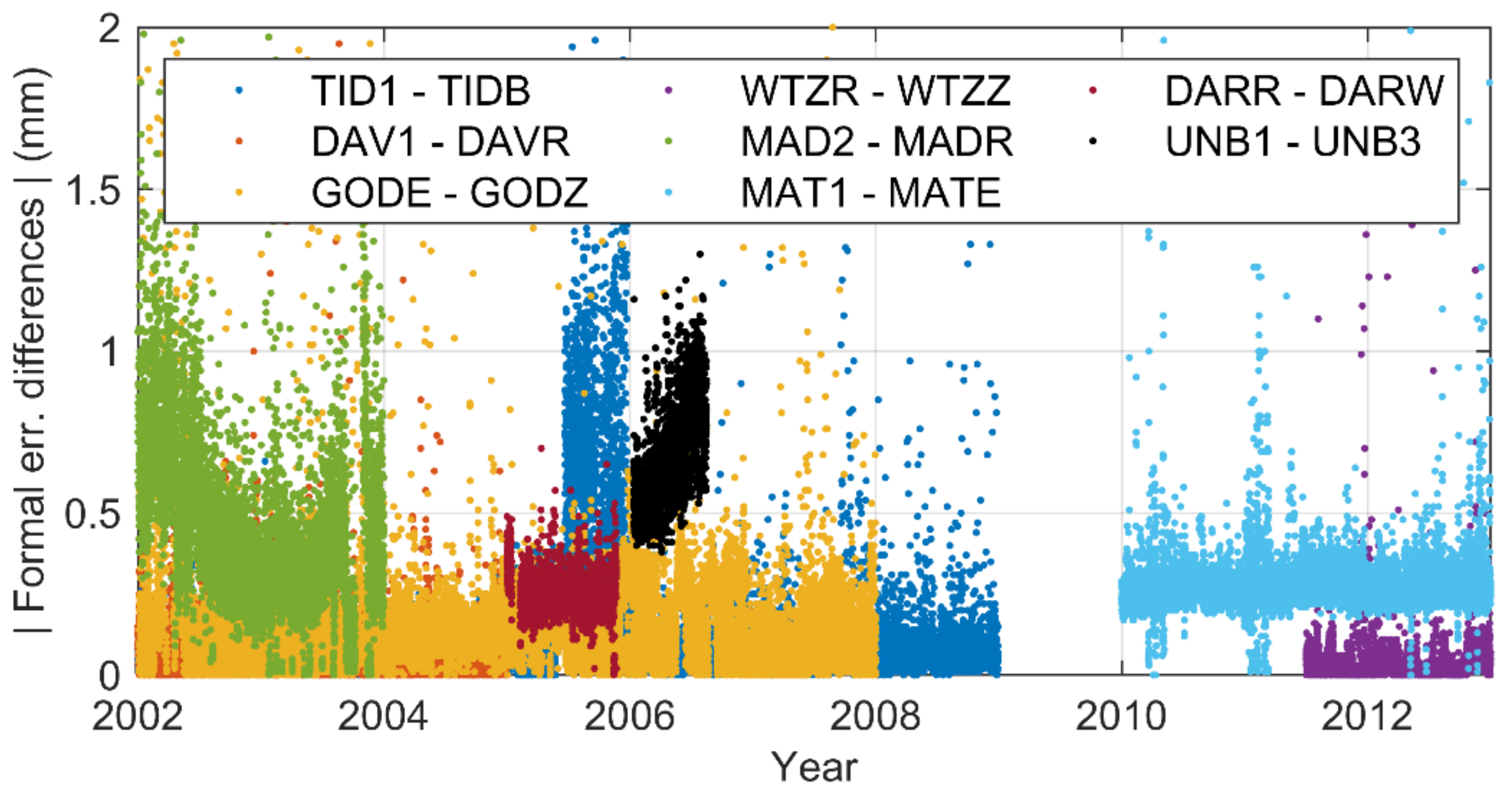
| STA1 | STA2 | Country | Antenna Type | Differences (m) | |Formal Error diff.| (mm) | |||
|---|---|---|---|---|---|---|---|---|
| N | E | U | ||||||
| 1 | TID1 | TIDB | Australia | AOAD/M_T JPLA | 0 | 0 | 0 | 0.08 ± 0.10 |
| 2 | DAV1 | DAVR | Antarctica | AOAD/M_T AUST | 0 | 0 | 0 | 0.07 ± 0.05 |
| 3 | GODE | GODZ | USA | AOAD/M_T JPLA | 0 | 0 | 0 | 0.16 ± 0.17 |
| 4 | WTZR | WTZZ | Germany | LEIAR25.R3 LEIT | 0 | 0 | 0.12 | 0.03 ± 0.05 |
| 5 | MAD2 | MADR | Spain | AOAD/M_T NONE | 0 | 0 | 0 | 0.45 ± 0.26 |
| 6 | MAT1 | MATE | Italy | TRM29659.00 NONE | 0 | 0 | 1.13 | 0.27 ± 0.05 |
| 7 | DARR | DARW | Australia | ASH700936D_M NONE | 0 | 0 | 0 | 0.25 ± 0.06 |
| 8 | UNB1 | UNB3 | Canada | JPSREGANT DD_E1 NONE | 0 | 0 | 0.08 | 0.67 ± 0.15 |
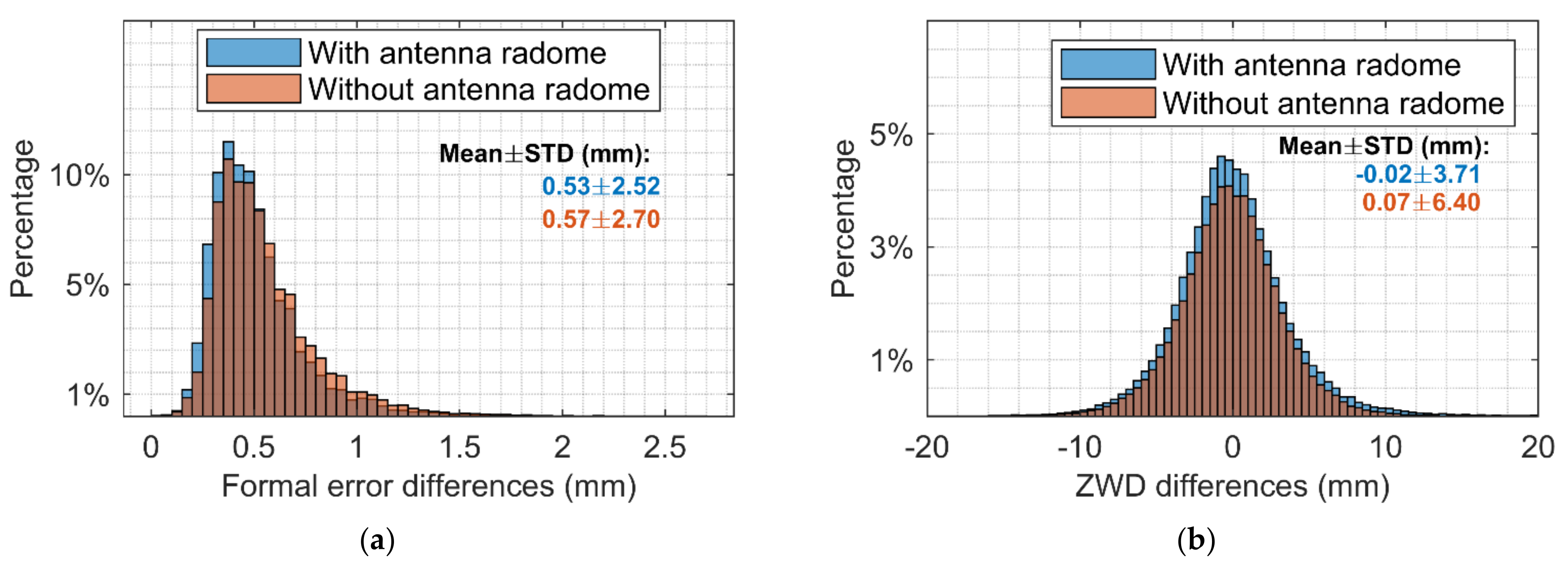
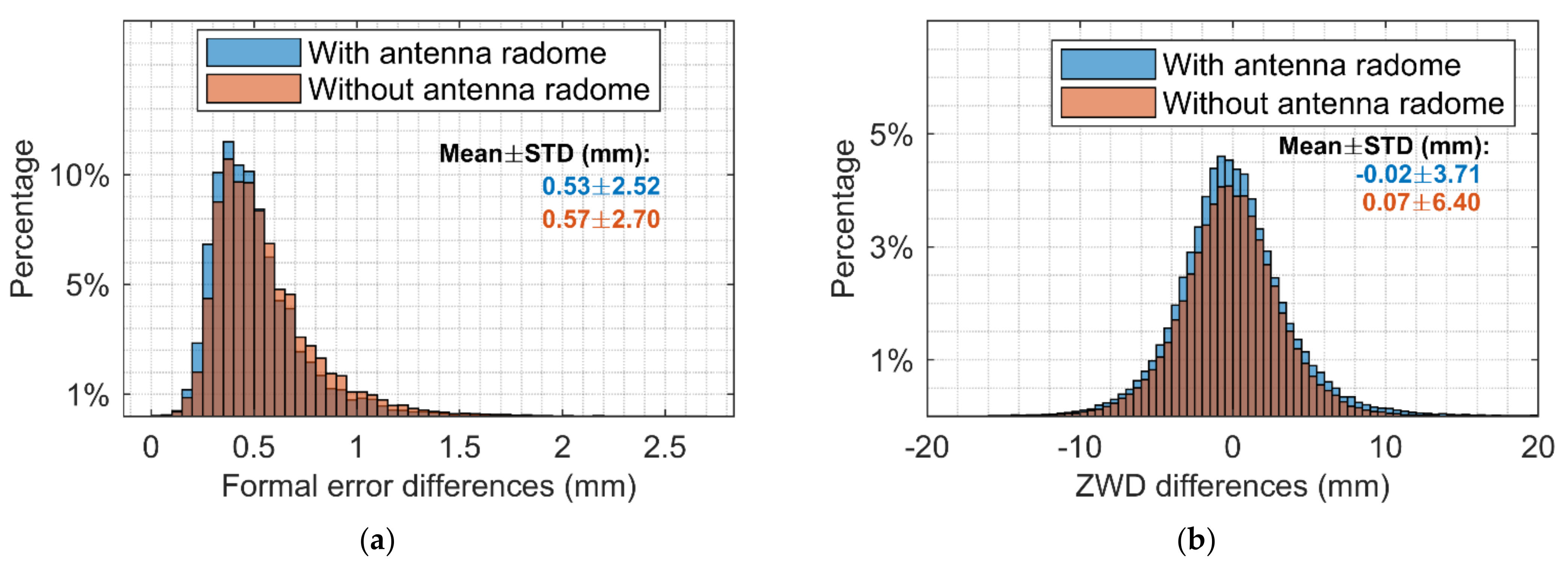
| without Antenna Radome | with Antenna Radome | ||
|---|---|---|---|
| Number of Stations | 50 | 36 | |
| ZWD differences | Mean ± STD (mm) | 0.07 ± 6.40 | −0.02 ± 3.71 |
| Variation range (mm) | [−99.90, 99.73] | [−21.75, 24.71] | |
| Formal error differences | Mean ± STD (mm) | 0.57 ± 0.25 | 0.53 ± 0.22 |
| Variation range (mm) | [0.01, 2.70] | [0.01, 2.52] |
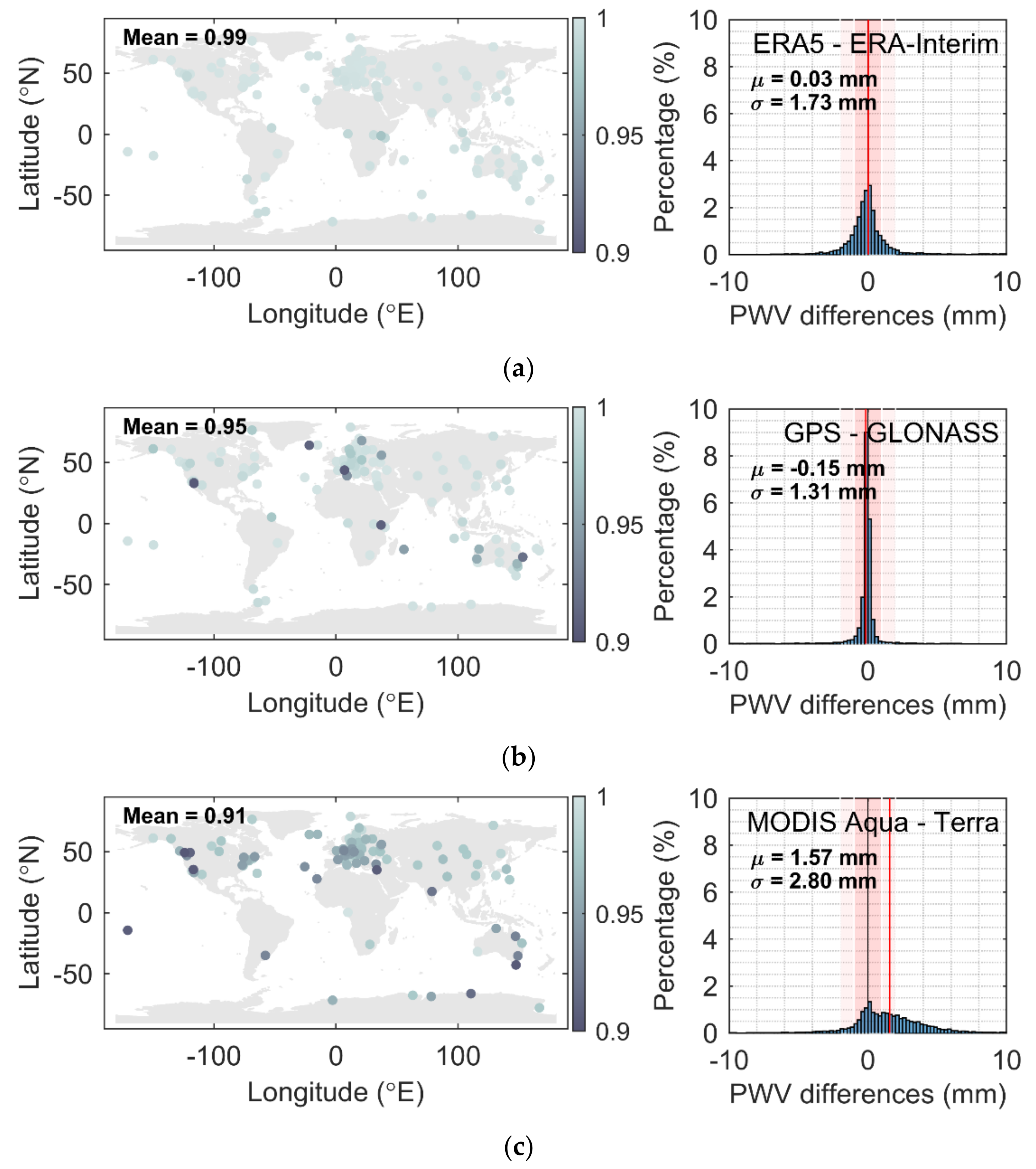
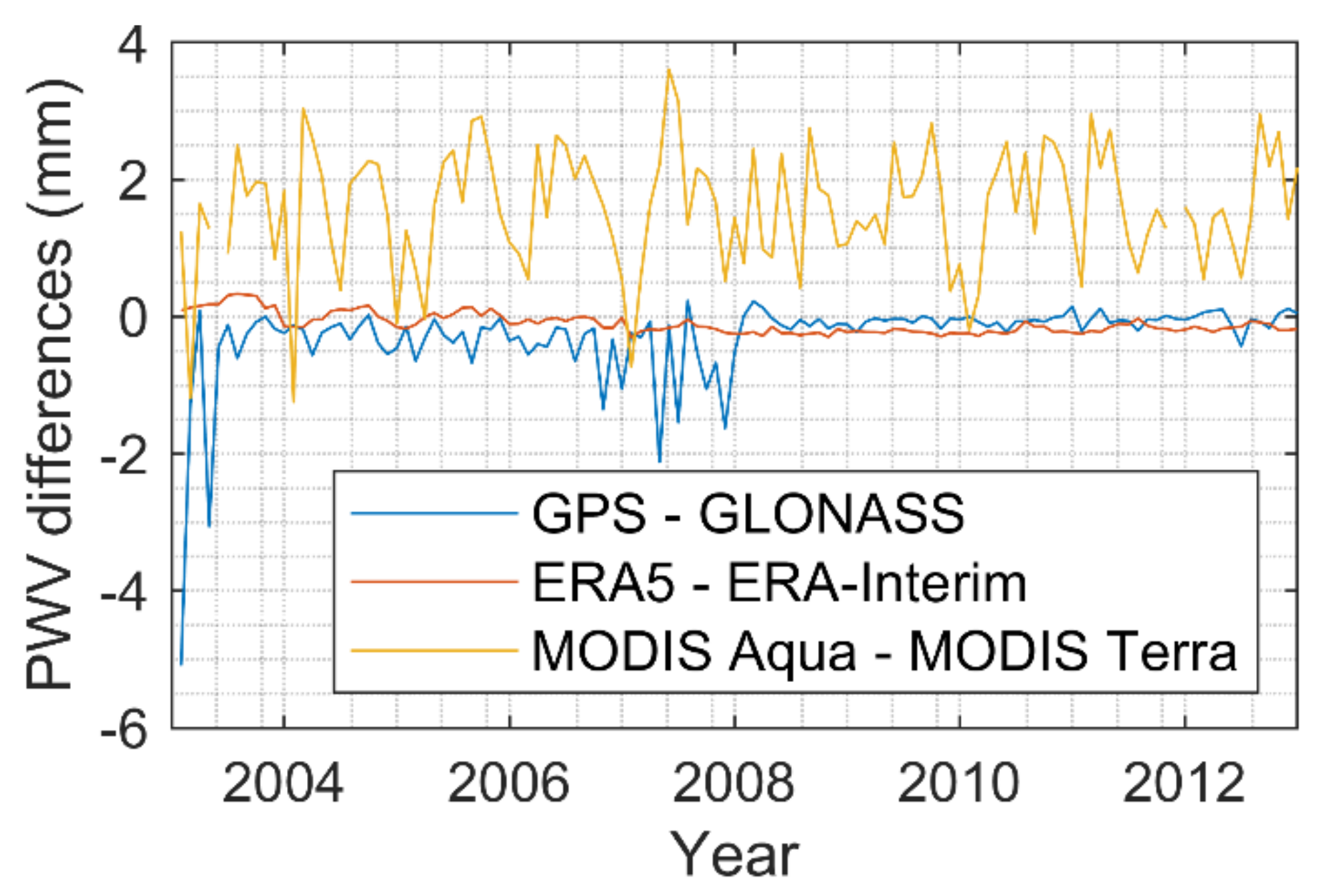
| ECMWF | GNSS | MODIS | ||||
|---|---|---|---|---|---|---|
| ERA5 | ERA-Interim | GPS | GLONASS | MODIS Aqua | MODIS Terra | |
| Mean of global PWV (mm) | 16.66 | 16.67 | 16.60 | 16.89 | 16.20 | 14.64 |
| Mean of global correlation coefficient | 0.99 | 0.95 | 0.91 | |||
| Mean and STD of diff. (mm) | 0.03 ± 1.73 | −0.15 ± 1.31 | 1.57 ± 2.80 | |||
| Percentage of diff. ϵ [−1, 1] | 81.33% | 92.00% | 31.33% | |||
| Percentage of diff. ϵ [−2, 2] | 95.33% | 96.67% | 68.00% | |||
| ERA5 (Ref.) | GPS | MODIS Aqua | AIRS | |
|---|---|---|---|---|
| Mean of global PWV (mm) | 17.83 | 17.81 | 17.72 | 17.35 |
| Mean of global correlation coefficient | 0.98 | 0.90 | 0.97 | |
| Mean and STD of diff. (mm) | 0.03 ± 2.32 | −0.11 ± 3.27 | 0.48 ± 2.30 | |
| Percentage of diff. ϵ (−1, 1) | 59.96% | 32.08% | 47.57% | |
| Percentage of diff. ϵ (−2, 2) | 81.54% | 56.73% | 75.14% | |
| Percentage of diff. ϵ (−3, 3) | 90.63% | 73.43% | 87.83% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.; Yang, T.; Wang, K.; Sun, B.; Yang, X. Evaluation of Precipitable Water Vapor Retrieval from Homogeneously Reprocessed Long-Term GNSS Tropospheric Zenith Wet Delay, and Multi-Technique. Remote Sens. 2021, 13, 4490. https://doi.org/10.3390/rs13214490
Su H, Yang T, Wang K, Sun B, Yang X. Evaluation of Precipitable Water Vapor Retrieval from Homogeneously Reprocessed Long-Term GNSS Tropospheric Zenith Wet Delay, and Multi-Technique. Remote Sensing. 2021; 13(21):4490. https://doi.org/10.3390/rs13214490
Chicago/Turabian StyleSu, Hang, Tao Yang, Kan Wang, Baoqi Sun, and Xuhai Yang. 2021. "Evaluation of Precipitable Water Vapor Retrieval from Homogeneously Reprocessed Long-Term GNSS Tropospheric Zenith Wet Delay, and Multi-Technique" Remote Sensing 13, no. 21: 4490. https://doi.org/10.3390/rs13214490
APA StyleSu, H., Yang, T., Wang, K., Sun, B., & Yang, X. (2021). Evaluation of Precipitable Water Vapor Retrieval from Homogeneously Reprocessed Long-Term GNSS Tropospheric Zenith Wet Delay, and Multi-Technique. Remote Sensing, 13(21), 4490. https://doi.org/10.3390/rs13214490