
Horizontal Visibility in Forests

 , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Field Measurements and Data Processing
2.2. Simulation of Tree Pattern
2.2.1. Electrostatic Model
2.2.2. Pattern Progress Model
2.2.3. Indices for the Description of Tree Distribution
2.3. Using Structure Indices in the Tree Location Pattern Simulation Model STPP
3. Results
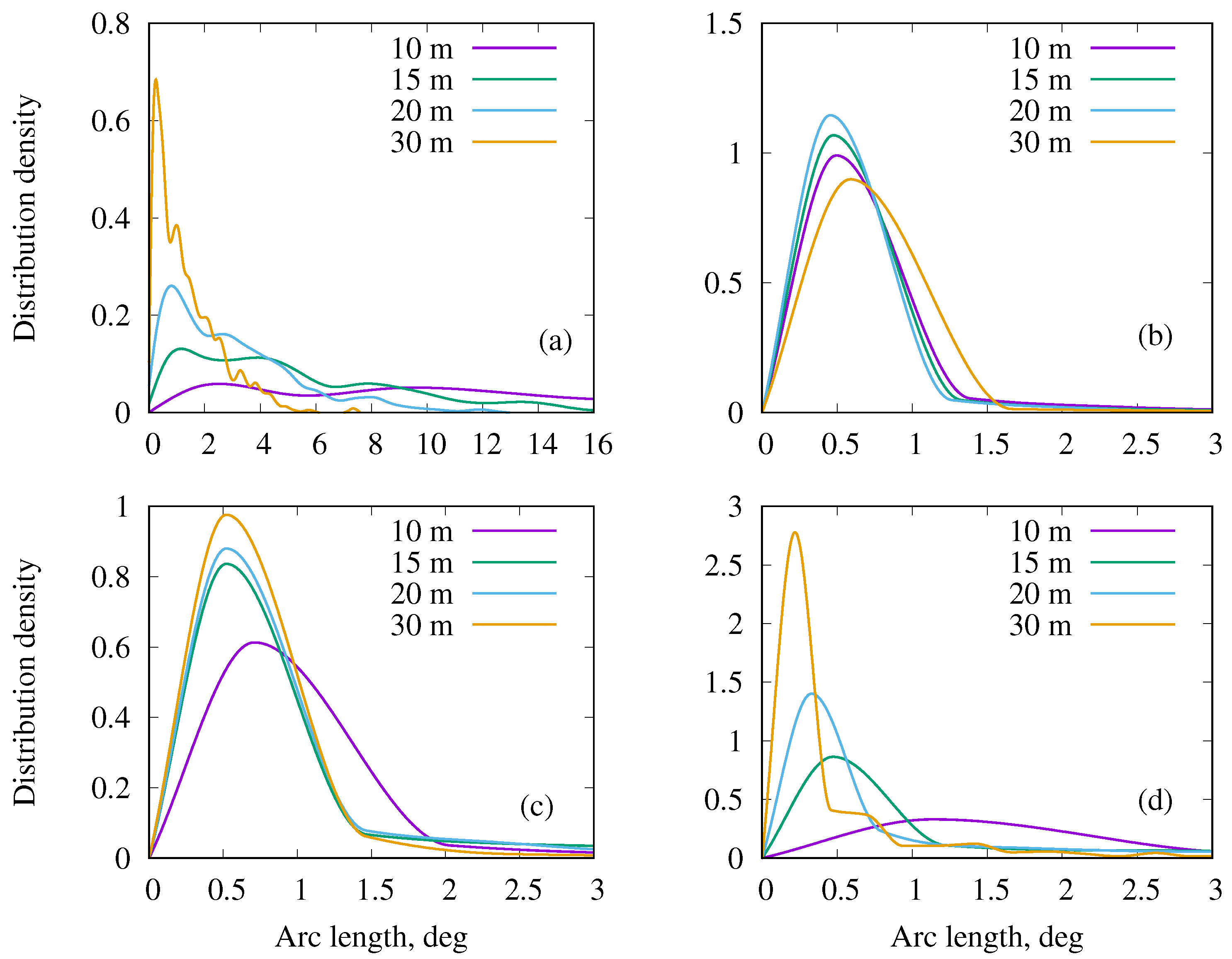
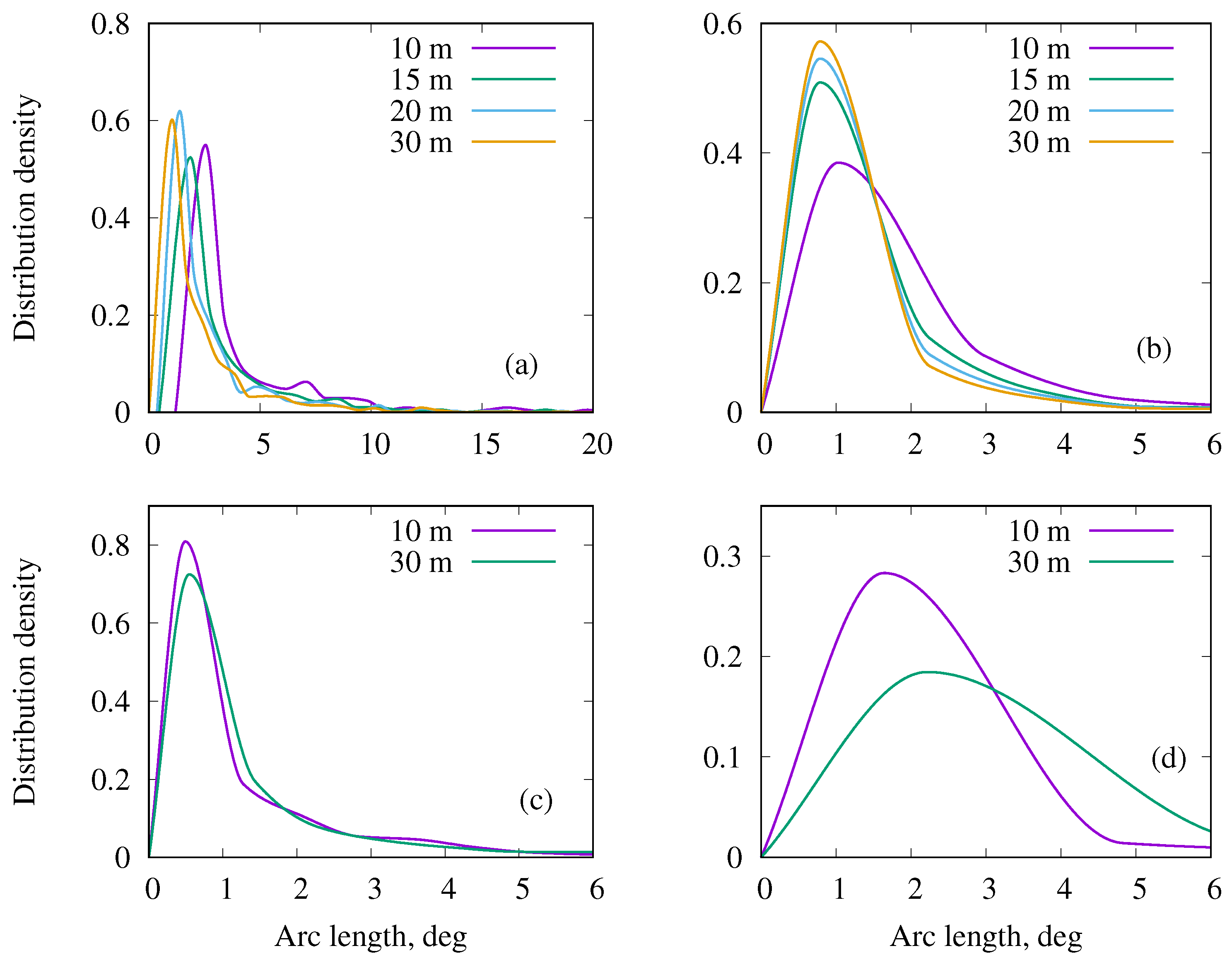
3.1. Horizontal Visibility
3.2. Visibility Statistics
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vukomanovic, J.; Singh, K.K.; Petrasova, A.; Vogler, J.B. Not seeing the forest for the trees: Modeling exurban viewscapes with LiDAR. Landsc. Urban Plan. 2018, 170, 169–176. [Google Scholar] [CrossRef]
- Falcão, A.O.; dos Santos, M.P.; Borges, J.G. A real-time visualization tool for forest ecosystem management decision support. Comput. Electron. Agric. 2006, 53, 3–12. [Google Scholar] [CrossRef]
- Wissen, U.; Schroth, O.; Lange, E.; Schmid, W.A. Approaches to integrating indicators into 3D landscape visualisations and their benefits for participative planning situations. J. Environ. Manag. 2008, 89, 184–196. [Google Scholar] [CrossRef]
- Karasov, O.; Vieira, A.A.B.; Külvik, M.; Chervanyov, I. Landscape coherence revisited: GIS-based mapping in relation to scenic values and preferences estimated with geolocated social media data. Ecol. Indic. 2020, 111, 105973. [Google Scholar] [CrossRef]
- Looney, C.E.; D’Amato, A.W.; Palik, B.J.; Fraver, S.; Kastendick, D.N. Size-growth relationship, tree spatial patterns, and tree-tree competition influence tree growth and stand complexity in a 160-year red pine chronosequence. For. Ecol. Manag. 2018, 424, 85–94. [Google Scholar] [CrossRef]
- Pascual, A. Building Pareto Frontiers under tree-level forest planning using airborne laser scanning, growth models and spatial optimization. For. Policy Econ. 2021, 128, 102475. [Google Scholar] [CrossRef]
- Zheng, Z.; Zeng, Y.; Schneider, F.D.; Zhao, Y.; Zhao, D.; Schmid, B.; Schaepman, M.E.; Morsdorf, F. Mapping functional diversity using individual tree-based morphological and physiological traits in a subtropical forest. Remote Sens. Environ. 2021, 252, 112170. [Google Scholar] [CrossRef]
- Korjus, H.; Põllumäe, P.; Kiviste, A.; Kangur, A.; Laarmann, D.; Sirgmets, R.; Lang, M. Online streaming public participation in forest management planning. For. Stud. Metsanduslikud Uurim. 2017, 66, 5–13. [Google Scholar] [CrossRef] [Green Version]
- Spurr, S. Aerial Photographs in Forestry; Ronald Press: New York, NY, USA, 1948. [Google Scholar]
- Dmitriev, I.D.; Murahtanov, E.S.; Sukhikh, V.I. Aerial Photography in Forestry (Lesnaja Aèrofotosëmka I Aviacija); Lesnaja Promyšlennost’: Moskva, Russia, 1981. [Google Scholar]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Nilsson, M.; Nordkvist, K.; Jonzén, J.; Lindgren, N.; Axensten, P.; Wallerman, J.; Egberth, M.; Larsson, S.; Nilsson, L.; Eriksson, J.; et al. A nationwide forest attribute map of Sweden predicted using airborne laser scanning data and field data from the National Forest Inventory. Remote Sens. Environ. 2017, 194, 447–454. [Google Scholar] [CrossRef]
- Kotivuori, E.; Maltamo, M.; Korhonen, L.; Packalen, P. Calibration of nationwide airborne laser scanning based stem volume models. Remote Sens. Environ. 2018, 210, 179–192. [Google Scholar] [CrossRef]
- Lang, M.; Sims, A.; Pärna, K.; Kangro, R.; Möls, M.; Mõistus, M.; Kiviste, A.; Tee, M.; Vajakas, T.; Rennel, M. Remote-sensing support for the Estonian National Forest Inventory, facilitating the construction of maps for forest height, standing-wood volume, and tree species composition. For. Stud. Metsanduslikud Uurim. 2020, 73, 77–97. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.; Parker, G.; Shugart, H. Surface Lidar Remote Sensing of Basal Area and Biomass in Deciduous Forests of Eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Dick, A.R.; Kershaw, J.A., Jr.; MacLean, D.A. Spatial tree mapping using photography. North. J. Appl. For. 2010, 27, 68–74. [Google Scholar] [CrossRef] [Green Version]
- Yrttimaa, T.; Saarinen, N.; Kankare, V.; Hynynen, J.; Huuskonen, S.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Performance of terrestrial laser scanning to characterize managed Scots pine (Pinus Sylvestris L.) Stands Is Depend. For. Struct. Var. ISPRS J. Photogramm. Remote Sens. 2020, 168, 277–287. [Google Scholar] [CrossRef]
- ATP-3.2.1. NATO Standard No. 3.2.1: Allied Land Tactics; Edition B, Version 1; Technical Report; NATO Standardization Office (NSO): Brussels, Belgium, 2018. [Google Scholar]
- Li, Q.; Nevalainen, P.; Peña Queralta, J.; Heikkonen, J.; Westerlund, T. Localization in unstructured environments: Towards autonomous robots in forests with delaunay triangulation. Remote Sens. 2020, 12, 1870. [Google Scholar] [CrossRef]
- Abegg, M.; Kükenbrink, D.; Zell, J.; Schaepman, M.; Morsdorf, F. Terrestrial laser scanning for forest inventories—Tree diameter distribution and scanner location impact on occlusion. Forests 2017, 8, 184. [Google Scholar] [CrossRef] [Green Version]
- Anstey, R.L. Visibility Measurements in Forested Areas (Special Report S-4); Technical Report; U.S. Army Natick Laboratories: Natick, MA, USA, 1964. [Google Scholar]
- Drummond, R.R.; Lackey, E.E. Visibility in Some Forest Stands of the United States (Technical Report EP-36); Technical Report; US Army Quartermaster Research & Development Center, Environmental protection research division: Natick, MA, USA, 1956. [Google Scholar]
- Artal, P. The Eye as an Optical Instrument. In Optics in Our Time; Al-Amri, M., El-Gomati, M., Zubairy, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 285–297. [Google Scholar] [CrossRef] [Green Version]
- Straatsma, M.W.; Warmink, J.J.; Middelkoop, H. Two novel methods for field measurements of hydrodynamic density of floodplain vegetation using terrestrial laser scanning and digital parallel photography. Int. J. Remote Sens. 2008, 29, 1595–1617. [Google Scholar] [CrossRef]
- Zasada, M.; Stereńczak, K.; Dudek, W.M.; Rybski, A. Horizon visibility and accuracy of stocking determination on circular sample plots using automated remote measurement techniques. For. Ecol. Manag. 2013, 302, 171–177. [Google Scholar] [CrossRef]
- Nilson, T. Radiative transfer in nonhomogeneous plant canopies. In Advances in Bioclimatology; Springer: Berlin/Heidelberg, Germany, 1992; Volume 1, pp. 59–88. [Google Scholar] [CrossRef]
- Kuusk, A.; Nilson, T. A directional multispectral forest reflectance model. Remote Sens. Environ. 2000, 72, 244–252. [Google Scholar] [CrossRef]
- Lang, M.; Vennik, K.; Põldma, A.; Nilson, T. Options for estimating horizontal visibility inhemiboreal forests using sparse airborne laserscanning data and forest inventory data. For. Stud. Metsanduslikud Uurim. 2020, 73, 125–135. [Google Scholar] [CrossRef]
- Gusakov, S.; Fradkin, A. Modelling of the Spatial Structure of Forest Ecosystems by Computers; Nauka i Technika: Minsk, Russia, 1990; p. 112. [Google Scholar]
- Gleichmar, W.; Gerold, D. Indizes zur Charakterisierung der horizontalen Baumverteilung. Forstw. Cbl. 1998, 117, 69–80. [Google Scholar] [CrossRef]
- Gadow, K.; Hui, G. Characterizing forest spatial structure and diversity. In Sustainable Forestry in Temperate Regions, Proceedings of the International Workshop Organized at the University of Lund, Sweden; University of Lund: Lund, Sweden, 2001; pp. 20–30. [Google Scholar]
- Goodall, D.; West, N. A comparison of techniques for assessing dispersion patterns. Vegetatio 1979, 40, 15–27. [Google Scholar] [CrossRef]
- Diggle, P.; Besag, J.; Gleaves, J. Statistical analysis of spatial point patterns by means of distance methods. Biometrics 1977, 33, 390–394. [Google Scholar] [CrossRef]
- Holgate, P. Tests of randomness based on distance methods. Biometrika 1965, 52, 345–353. [Google Scholar] [CrossRef]
- Kuusk, A.; Lang, M.; Kuusk, J. Database of optical and structural data for the validation of forest radiative transfer models. In Radiative Transfer and Optical Properties of Atmosphere and Underlying Surface. Light Scattering Reviews 7; Kokhanovsky, A.A., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 109–148. [Google Scholar]
- Widlowski, J.L.; Mio, C.; Disney, M.; Adams, J.; Andredakis, I.; Atzberger, C.; Brennan, J.; Busetto, L.; Chelle, M.; Ceccherini, G.; et al. The fourth phase of the radiative transfer model intercomparison (RAMI) exercise: Actual canopy scenarios and conformity testing. Remote Sens. Environ. 2015, 169, 418–437. [Google Scholar] [CrossRef]
- Lang, M.; Kuusk, A.; Kaha, M.; Pisek, J.; George, J.P.; Kiviste, A.; Laarmann, D.; Türk, K.; Arumäe, T. Changes during twelve years in three mature hemi-boreal stands growing in radiation model inter-comparison test site, Järvselja, Estonia. For. Stud. Metsanduslikud Uurim. 2021, 74. [Google Scholar] [CrossRef]
- Burkhart, H.; Tomé, M. Modeling Forest Trees and Stands; Springer: Dordrecht, The Netherlands, 2012; p. 457. [Google Scholar]
- Nilson, T. Inversion of gap frequency data in forest stands. Agric. For. Meteorol. 1999, 98-99, 437–448. [Google Scholar] [CrossRef]
- Clark, P.; Evans, F. Distance to nearest neighbor as a measure of spatial relationships in populations. Ecology 1954, 35, 445–453. [Google Scholar] [CrossRef]
- Diggle, P. The detection of random heterogeneity in plant populations. Biometrics 1977, 33, 390–394. [Google Scholar] [CrossRef]
- Gadow, K.; Hui, G.; Albert, M. Das Winkelmass-ein Strukturparameter zur Beschreibung der Individualverteilung in Waldbeständen. Cent. Für Das Gesamte Forstwes. 1998, 115, 1–9. [Google Scholar]
- Tianyang, D.; Jian, Z.; Sibin, G.; Ying, S.; Jing, F. Single-Tree Detection in High-Resolution Remote-Sensing Images Based on a Cascade Neural Network. ISPRS Int. J. Geo-Inf. 2018, 7, 367. [Google Scholar] [CrossRef] [Green Version]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A benchmark of lidar-based single tree detection methods using heterogeneous forest data from the Alpine space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | N | H | L | ||
|---|---|---|---|---|---|
| Pine stand, center coordinates 58°1841.2 27°1748.6E | |||||
| age 124 years, transitional bog, deep Sphagnum peat | |||||
| Upper layer | |||||
| Pinus sylvestris L. | 1115 | 15.9 | 18.0 | 4.2 | 1.5 |
| Understory | |||||
| Betula pubescens Ehrh. | 6 | 4.1 | 5.5 | 2.9 | 0.8 |
| Birch stand, center coordinates 58°1649.9 27°1951.2E | |||||
| age 49 years, brown gley-soil Eutri Mollic Gleysol | |||||
| Upper layer | |||||
| Betula pendula Roth | 399 | 26.5 | 20.7 | 9.2 | 1.6 |
| Alnus glutinosa (L.) Gaertn. | 176 | 23.4 | 22.4 | 9.8 | 2.0 |
| Populus tremula L. | 78 | 26.8 | 21.6 | 8.2 | 2.0 |
| Second layer | |||||
| Tilia cordata Mill. | 205 | 15.9 | 12.8 | 8.1 | 1.9 |
| Betula pendula Roth | 66 | 17.9 | 10.5 | 5.6 | 1.0 |
| Fraxinus excelsior L. | 30 | 15.4 | 10.9 | 4.0 | 1.6 |
| Alnus glutinosa (L.) Gaertn. | 20 | 17.5 | 13.1 | 8.5 | 1.4 |
| Acer platenoides L. | 16 | 15.7 | 11.3 | 4.3 | 1.9 |
| Regeneration layer | |||||
| Picea abies Karst. | 39 | 8.9 | 8.9 | 4.8 | 1.2 |
| Spruce stand, center coordinates 58°1743.0 27°1522.0E | |||||
| age 59 years, drained gleyi-ferric podzol | |||||
| Upper layer | |||||
| Picea abies Karst. | 624 | 23.2 | 23.5 | 10.8 | 1.8 |
| Betula pendula Roth | 143 | 24.5 | 17.9 | 8.5 | 1.5 |
| Second layer | |||||
| Betula pendula Roth | 152 | 17.5 | 9.3 | 4.5 | 0.9 |
| Picea abies Karst. | 517 | 13.8 | 11.1 | 6.3 | 1.2 |
| Regeneration layer | |||||
| Picea abies Karst. | 157 | 8.0 | 6.9 | 4.4 | 1.1 |
| Picea abies Karst. | 89 | 5.3 | 5.2 | 3.7 | 1.1 |
| Scanner Parameter | Leica ScanStation C10 | Leica RTC360 | Trimble SX10 |
|---|---|---|---|
| Max speed, points/s | 50,000 | 2,000,000 | 26,600 |
| Range | 300 m at 90% * | 130 m | 300 m at 90% |
| 134 m at 18% | 50 m at 18% | ||
| Wavelength | 532 nm | 1550 nm | 1550 nm |
| Horizontal range | 360° | 360° | 360° |
| Vertical range | 270° | 300° | 300° |
| Position accuracy | 6 mm | 5.3 mm at 40 m | 2.5 mm at 100 m |
| Distance accuracy | 4 mm | 5.3 mm at 40 m | 2 mm |
| Angle accuracy | 13 | 18 | 5 |
| Spot size | 7 mm at 50 m | 0.5 mrad ** | 7 mm at 50 m |
| Scan size, | selectable | selectable | |
| 10,168 | |||
| 20,334 |
| Scanner Parameter | Leica ScanStation C10 | Leica RTC360 | Trimble SX10 |
|---|---|---|---|
| Date | 5–8 August 2013 | 2, 16 August 2019 | 28–29 August 2019 |
| Angular step | |||
| L1–L9 | 0.046° | 0.018° | 0.068° |
| LA–LF | 0.023° | ||
| Label in text | |||
| Pine, step 10 m | 0.07° | ||
| Label in text |
| Index | Pine | Birch | Spruce |
|---|---|---|---|
| FGI | 0.72 | 0.91 | 1.10 |
| 1.12 | 1.05 | 0.95 | |
| 1.19 | 1.07 | 1.08 | |
| Hopkins | 0.63 | 0.95 | 1.10 |
| Clark-Evans, modified | 1.43 | 1.49 | 1.55 |
| Diggle | 108 | 159 | 204 |
| Winkelmass_4 | 0.569 | 0.585 | 0.581 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, M.; Kuusk, A.; Vennik, K.; Liibusk, A.; Türk, K.; Sims, A. Horizontal Visibility in Forests. Remote Sens. 2021, 13, 4455. https://doi.org/10.3390/rs13214455
Lang M, Kuusk A, Vennik K, Liibusk A, Türk K, Sims A. Horizontal Visibility in Forests. Remote Sensing. 2021; 13(21):4455. https://doi.org/10.3390/rs13214455
Chicago/Turabian StyleLang, Mait, Andres Kuusk, Kersti Vennik, Aive Liibusk, Kristina Türk, and Allan Sims. 2021. "Horizontal Visibility in Forests" Remote Sensing 13, no. 21: 4455. https://doi.org/10.3390/rs13214455
APA StyleLang, M., Kuusk, A., Vennik, K., Liibusk, A., Türk, K., & Sims, A. (2021). Horizontal Visibility in Forests. Remote Sensing, 13(21), 4455. https://doi.org/10.3390/rs13214455