1. Introduction
Bathymetry or measurement of water depth in coastal areas is crucial in many fields such as coastal shipping, dredging activity monitoring, coastal ecosystem management, fishery development, mineral exploration, natural disaster management, as well as coastal research and modeling [
1,
2]. Moreover, the availability of accurate water depth data is also critical for the stability and safety of beaches and waterfront buildings. Bathymetric measurements are also necessary for the exploration, development, protection and management of natural resources, especially coastal environments [
3]. Furthermore, dredging and maintenance of wharves and waterways are crucial for ensuring proper ship navigation and safe operation of port infrastructure and facilities. In fact, most seaports have channels that can suffer from sedimentation, which reduces the water depth and hence impedes navigation [
4]. Thus, maintenance and dredging are needed to improve and facilitate navigation; deeper port drafts are sought to accommodate bigger ships; and marine and river environments should be developed and maintained [
5,
6]. In order to minimize the efforts and costs associated with dredging operations, the seabed water level must be accurately estimated. Conventional methods for water depth estimation require ship-enabled detailed measurements which are time-consuming, expensive, and sometimes dangerous. In addition, these methods are difficult to apply in remote areas. Also, echo detectors are usually used to measure water depth [
7]. In fact, the single-beam echo sounder is the most commonly used technique for measuring the water depth in seaports. Other common techniques utilize echo generators. Currently, multi-beam echo detectors and light detection and ranging (LiDAR) devices are usually used for high-resolution water depth estimation in shallow waters. However, these devices have high operating costs; their use requires many safety precautions; and they are more applicable only in small areas [
8,
9].
The aforementioned considerations have motivated the exploitation of emerging remote-sensing technologies in order to achieve more reliable water depth estimation at a lower cost [
10]. For example, the combination of an echo sounder and remote-sensing satellite data leads to enhanced water depth estimation. The remote-sensing bathymetry methods generally can be categorized into physics-based methods and empirical methods. The physics-based methods simulate the interactions of light through water columns, while the empirical methods seek to build regression models between the spectral radiation patterns and the in situ calibration data [
11,
12]. Nevertheless, the accuracy of the remote-sensing bathymetry methods is typically limited for water depth estimation in shallow areas. The decline in accuracy is essentially due to the limited coverage and space of these methods, as well as the wide variations in water clarity.
Machine learning methods have been also considered for constructing more general models for water depth estimation. These methods could be employed to better exploit the multi-dimensional characteristics of multi-spectral sensor data. Although inferring and explaining the relationship between the water depth and these characteristics is quite challenging especially under different observation conditions, the machine learning methods can be effectively employed to face this challenge through different numerical models and hence provide superior solutions [
13]. In recent years, water depth estimation has been addressed through various machine learning methods including those based on neural networks [
14], random forests [
15], support vector machines [
16], and others [
16,
17]. Traditionally, training and optimizing a water depth model is carried out with one set of multi-spectral images and a single machine learning algorithm [
16]. A prominent example of port bathymetry is the work of Mateo-Pérez et al. [
16], who used a support vector machine and Sentinel-2 satellite imagery data of 2020 to find interval estimates of the water depths at the Spanish ports of Candás and Luarca as 0–4.5 m and 0–12 m, with corresponding root-mean-square error (RMSE) values of 0.37 m and 0.44 m, respectively. In 2021, Mateo-Pérez et al. [
17], obtained further depth estimates at the port of Candás with RMSE values of 0.33 m and 0.46 m for random-forest and RBF-kernel SVM techniques, respectively. Since multiple water depth control points are required for model training, the model accuracy depends on the number of control points and hence the performance outcomes of different models are not easily comparable.
Apart from ports, the same or similar techniques were also exploited for retrieving bathymetry in shallow turbid waters in the last few decades [
18,
19,
20], and many improvements have been made recently [
21,
22,
23,
24]. In 2002, V. Lafon et al. [
18], carried out a simple method applied to shallow waters of a moderately turbid tidal inlet by using an SOPT image, and the mean difference between measured depths and computed depths is about 20%. In 2020, Caballero et al. [
25], using a Sentinel-2A/B image to estimate bathymetry with median errors of under 0.5 m for depths 0–13 m when validated with lidar survey. An alternative approach is to combine ensemble learning methods with multi-spectral imaging data [
25,
26]. For example, Mohamed et al. [
18], used ensemble learning algorithms and SPOT-4 images to estimate the water depth at El-Burullus Lake in Egypt as 0.3–1.3 m with an RMSE value of 0.15 m. Also, Surisetty et al. [
19], explored multiple Sentinel-2 image datasets and machine learning algorithms for high-precision water depth estimation at Rushikonda Beach in India. A water depth estimation of 0–13 m (with a RMSE of 0.36 m) was obtained through the combination of the log-linear model (LLM) and support vector regression (SVR).
The aforementioned methods have generally improved the accuracy of bathymetry by utilizing remote-sensing images and algorithms. However, the useful information of the water depth control points has not yet been fully exploited. In order to boost the accuracy and robustness of the current methods for water depth estimation, adaptive exploration of this type of information should be carried out in conjunction with ensemble machine learning algorithms. In our work, we integrate control-point information of the water depth along with machine learning methods, use the control points twice to perform depth regression, and finally obtain water depth estimates. The feasibility of the proposed approach is demonstrated for a test site.
4. Experimental Setup and Results
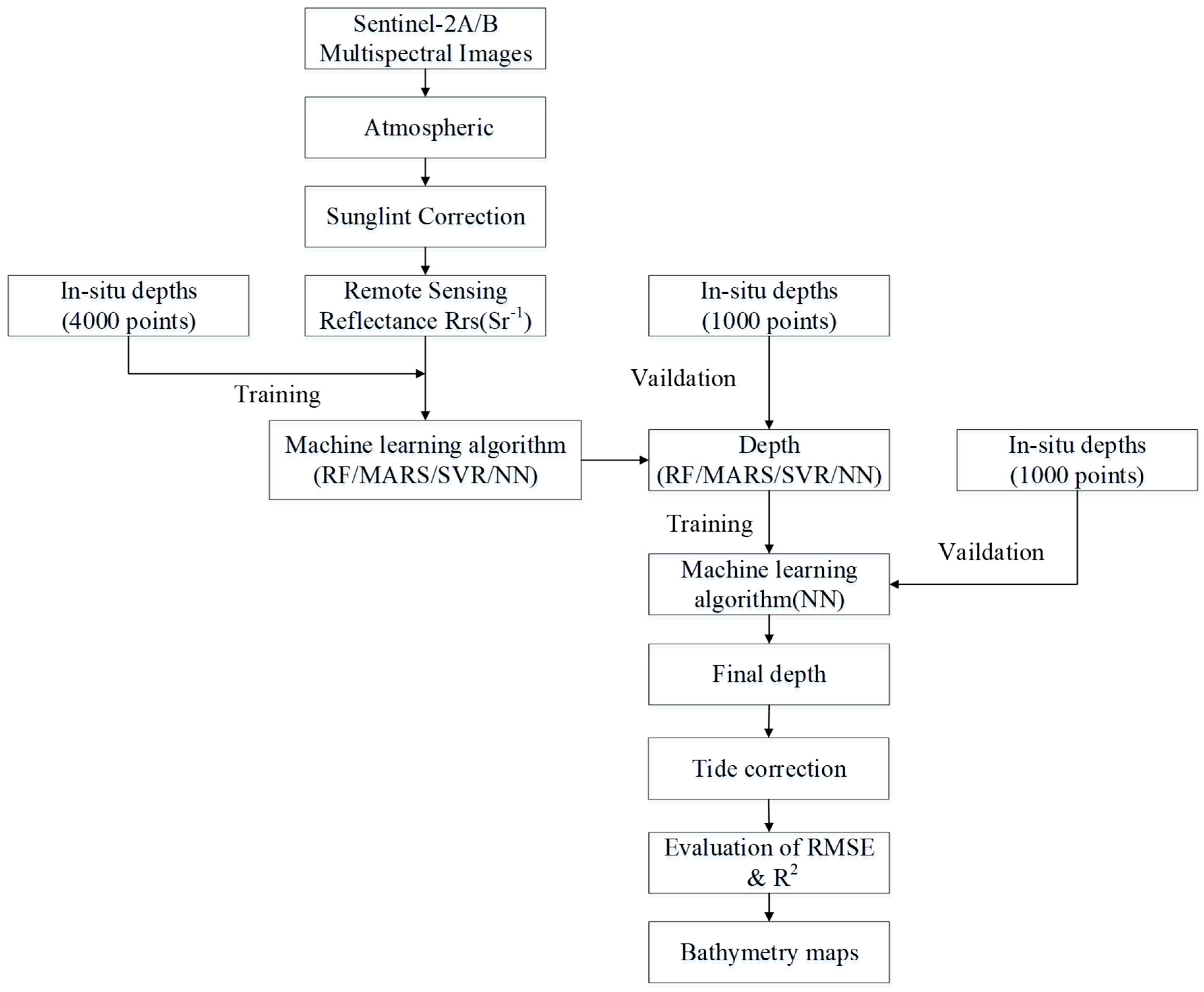
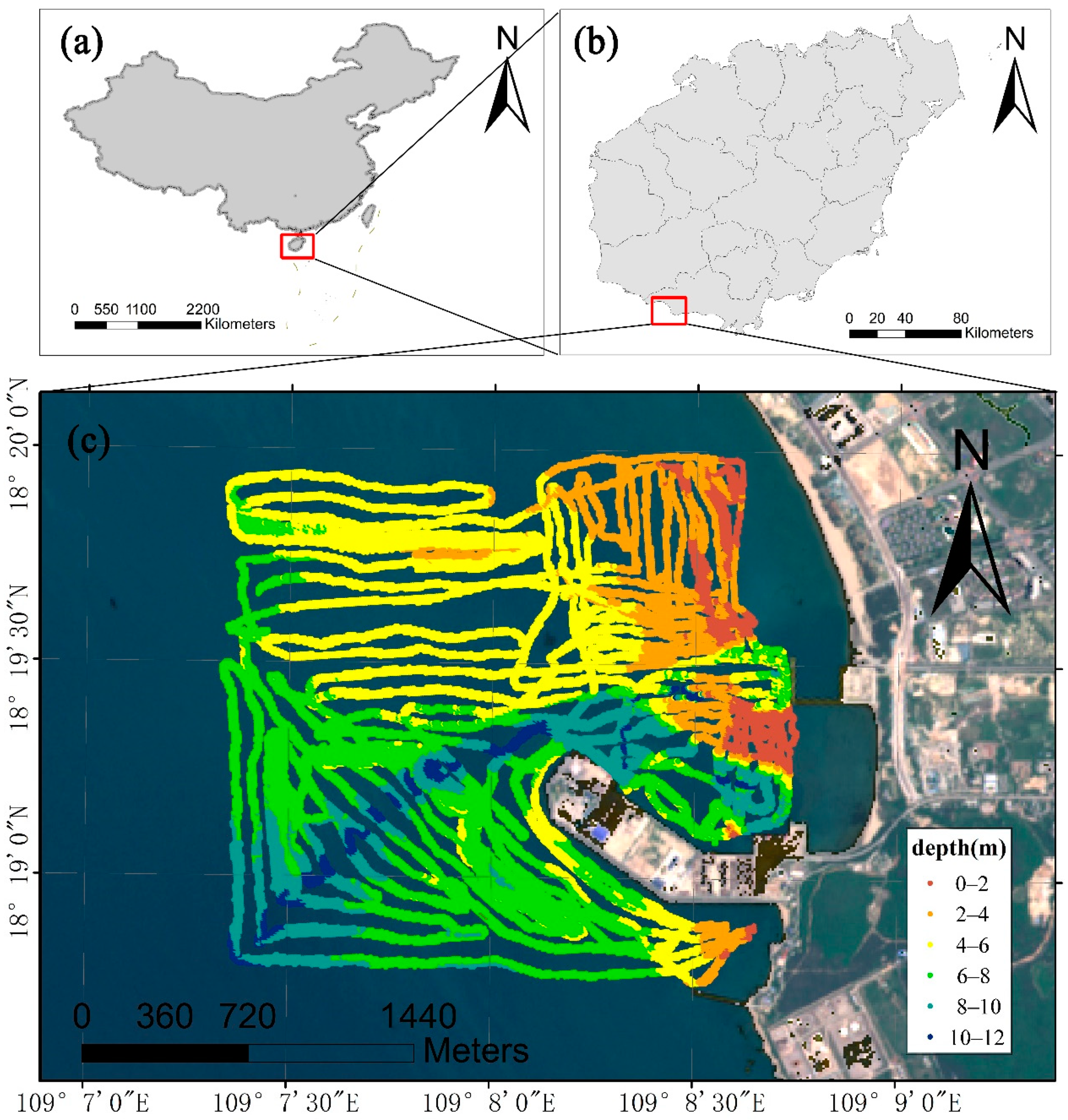
We investigated the accuracy of water depth estimation based on integrating multiple training datasets of Sentinel-2 images and machine learning algorithms. The performance of the proposed approach is compared against that of a single training dataset. Note that the number of samples affects the depth estimation results, and that the higher the number of training samples, the higher the accuracy. Therefore, we chose a high sample size for water depth estimation, and randomly selected calibration and verification samples from the in situ measurements. Each training set has 4000 points; the first layer of the ensemble training set has 4000 points; and its second layer has a training set of 1000 points. Firstly, a training set of 4000 points and a machine learning algorithm were used to estimate the water depth, and a 1000-point training set was used for inversion to obtain the value of the first layer. The water depth was retrieved based on the control points associated with the 1000-point training set. Then, this training set was used for inversion to obtain the final depth results. Finally, the final results obtained by different machine learning algorithms in the first layer were used to obtain the values of the RMSE and the coefficient of determination R2.
The experiments were carried out in a Python environment. In order to ensure the consistency and stability of different algorithms, each experiment was repeated 20 times. In addition, in order to reduce the influence of the uneven spatial distribution of the water depth control points, the training and verification points were selected using spatial uniform sampling instead of equal sampling. Random calibration samples were selected with the same relative percentage as that of the depth distribution. For each sample, the RMSE and R2 values were calculated between the retrieved and ground-truth water depth values, and the final result was set as the average value over all samples.
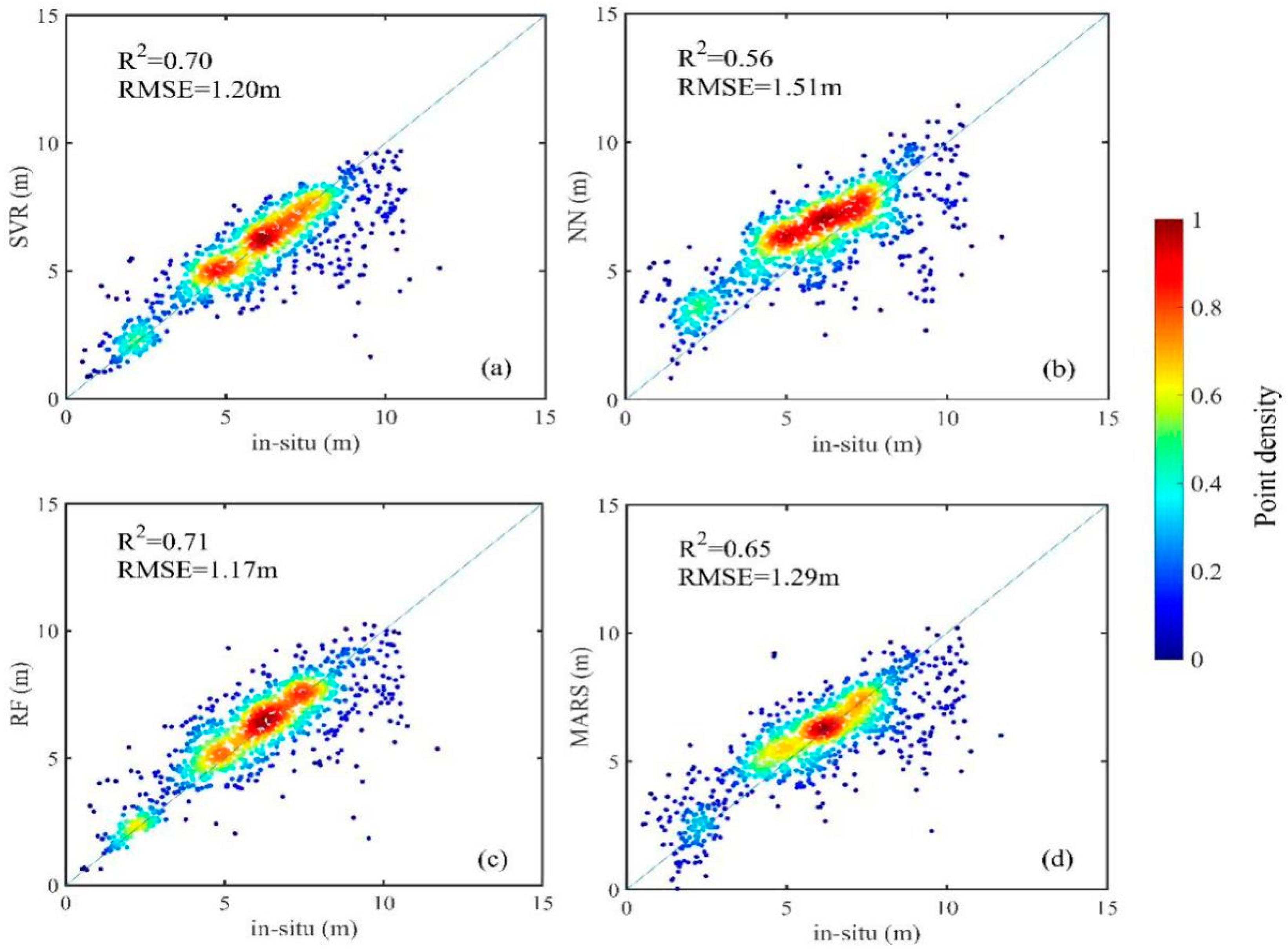
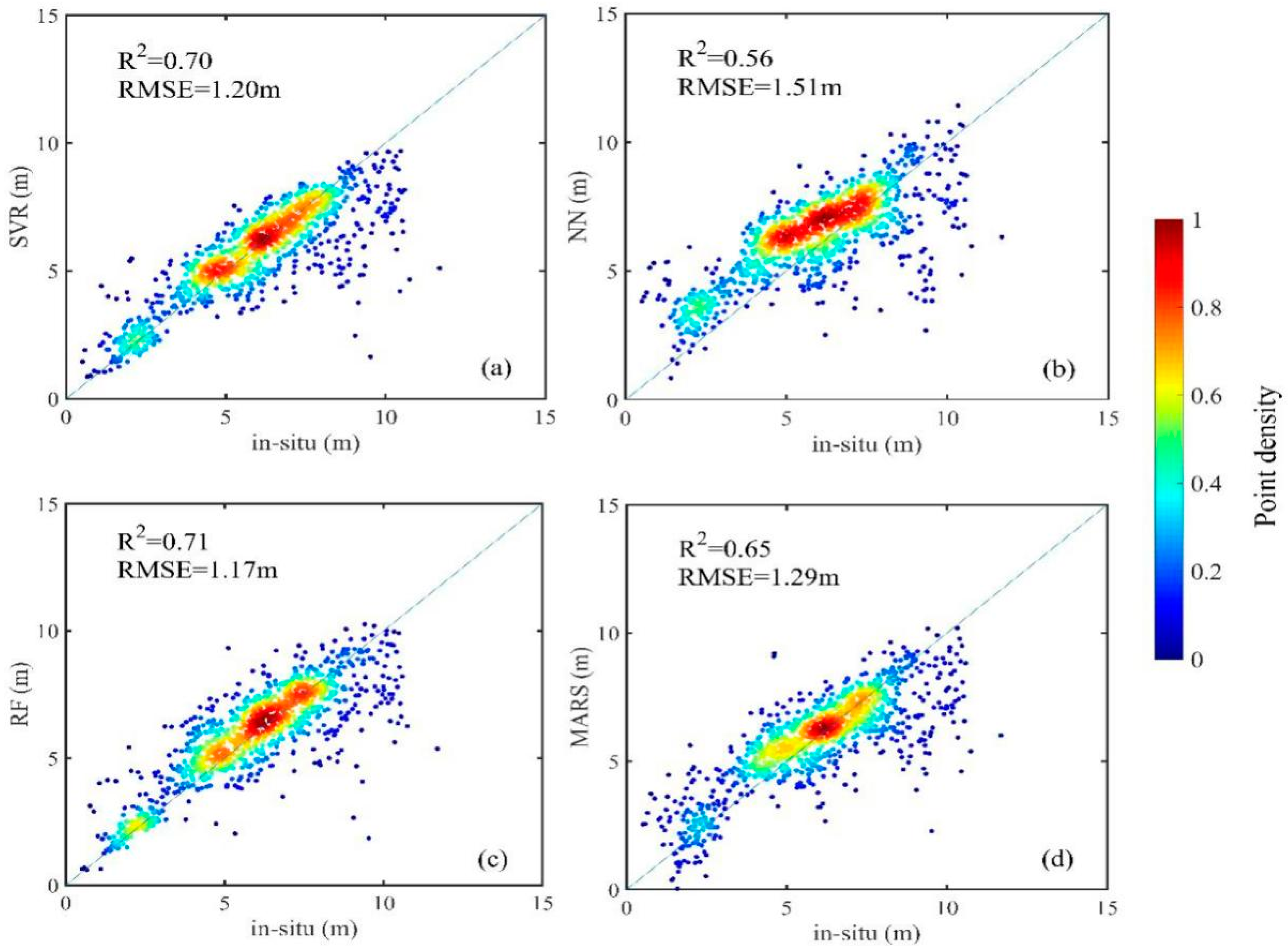
The water depth estimation results varied among the different machine learning algorithms. As the training dataset size increases, the RMSE value decreases while the R
2 value increases (see
Figure 3 and
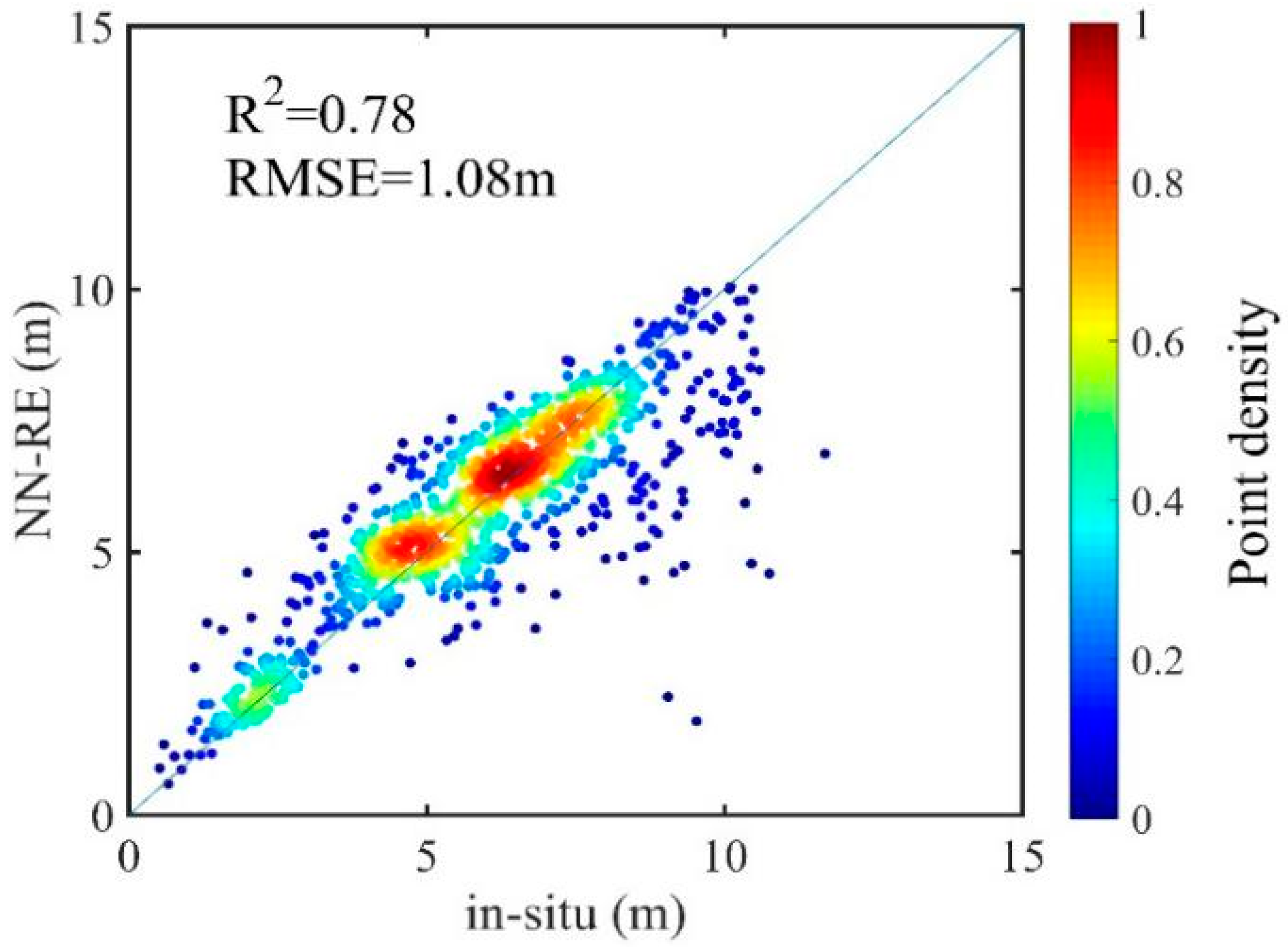
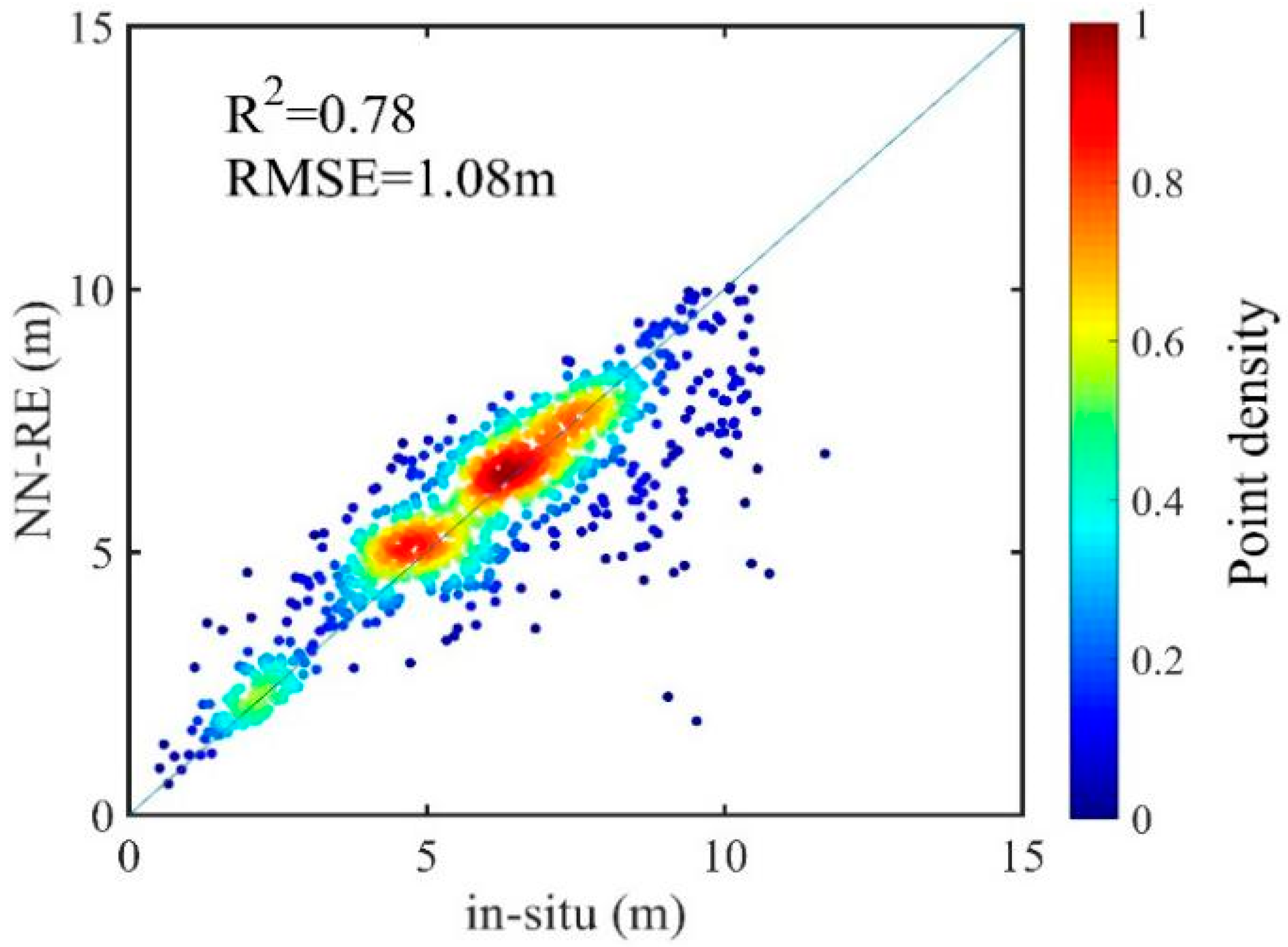
Figure 4). Although the number of samples influences the results, the conclusions are consistent with those of a moderate number of training samples. For Nanshan port, when one training dataset was used, the regression result based on random forests was the best while the neural-network-based result was the worst. However, the neural-network result with two training datasets was significantly better than that with one training dataset (see
Figure 3 and
Figure 4).
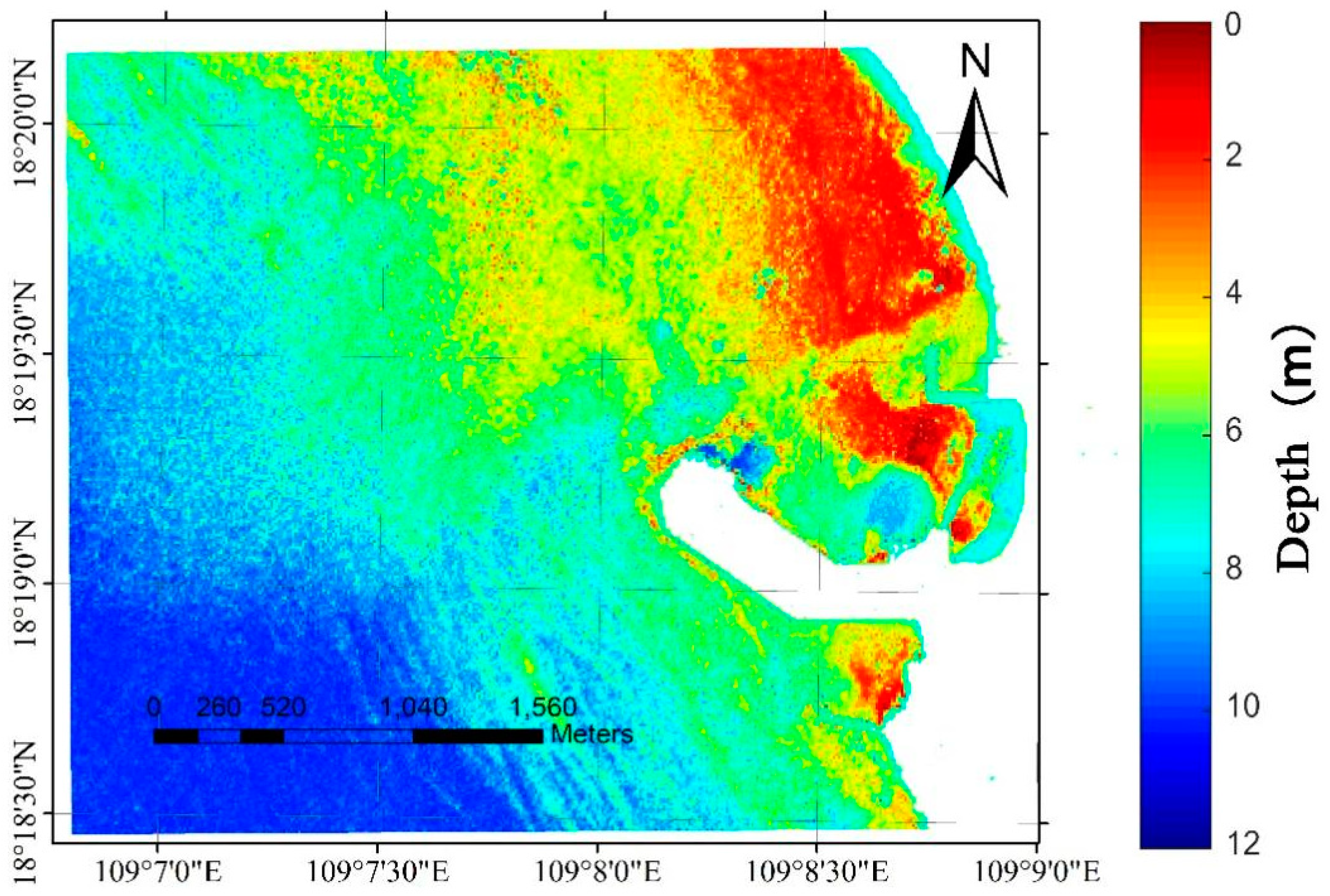
Collectively,
Figure 5 shows a map of the estimated water depth for the study area with a depth range of 0–12 m. The results show lower accuracies at shallow depths (<0.5 m) and high depths (>11 m) for Nanshan port, and this is especially true in the vicinity of the shoreline. However, the depth estimation results are more accurate for the depth range of 1–10 m. In addition, flare removal is applied only to the visible band (but not the infrared one), and the depth mapping results have significant noise due to the presence of the flare-contaminated infrared band patterns. Compared with the measured data, the satellite-based topographic map can better reflect the trend of the water depth variability, except for some minor errors in the details. At 0–4 m, the trend of both is basically the same, and the area in the upper left corner of the 4–6 m study area is estimated to be very deep. At depths of 6–8 m, the trend of water depth is similar, and the satellite-based depth result can reflect the channel in the field survey, but underestimates the actual water depth. The depth around the wharf has been well estimated (except for the northern part of the wharf; this might be a result of water conditions, which allow a clear boundary between images and depth estimation results). The result map shows that the satellite-based water depth estimation is highly reliable.
5. Discussion
No machine learning algorithm or solution can generally perform well on all sets of data. Therefore, multiple algorithms are usually employed to find the best solution. Here, we compare bathymetry results for different water depth ranges based on the root-mean-square errors of the NN, RF, SVM and MARS classifiers as well as the proposed integrating method (
Table 1). These methods enable water depth estimation under different conditions of human activities, pollution, or sediment accretion. The proposed ensemble method has the highest overall accuracy with a RMSE that is 0.1 m less than the closest RMSE value among all other methods. However, the proposed method achieves the best accuracy for only some water depth ranges, namely the 0–3 m and 6–9 m ranges. At the 3–6 m depth range, the SVM method shows the highest accuracy, while the RF method has the highest accuracy at water depths greater than 9 m. Because the machine learning methods exploit all reflectance data and water-depth training points, only the overall best depth estimates are obtained, while the locally optimal estimates are ignored.
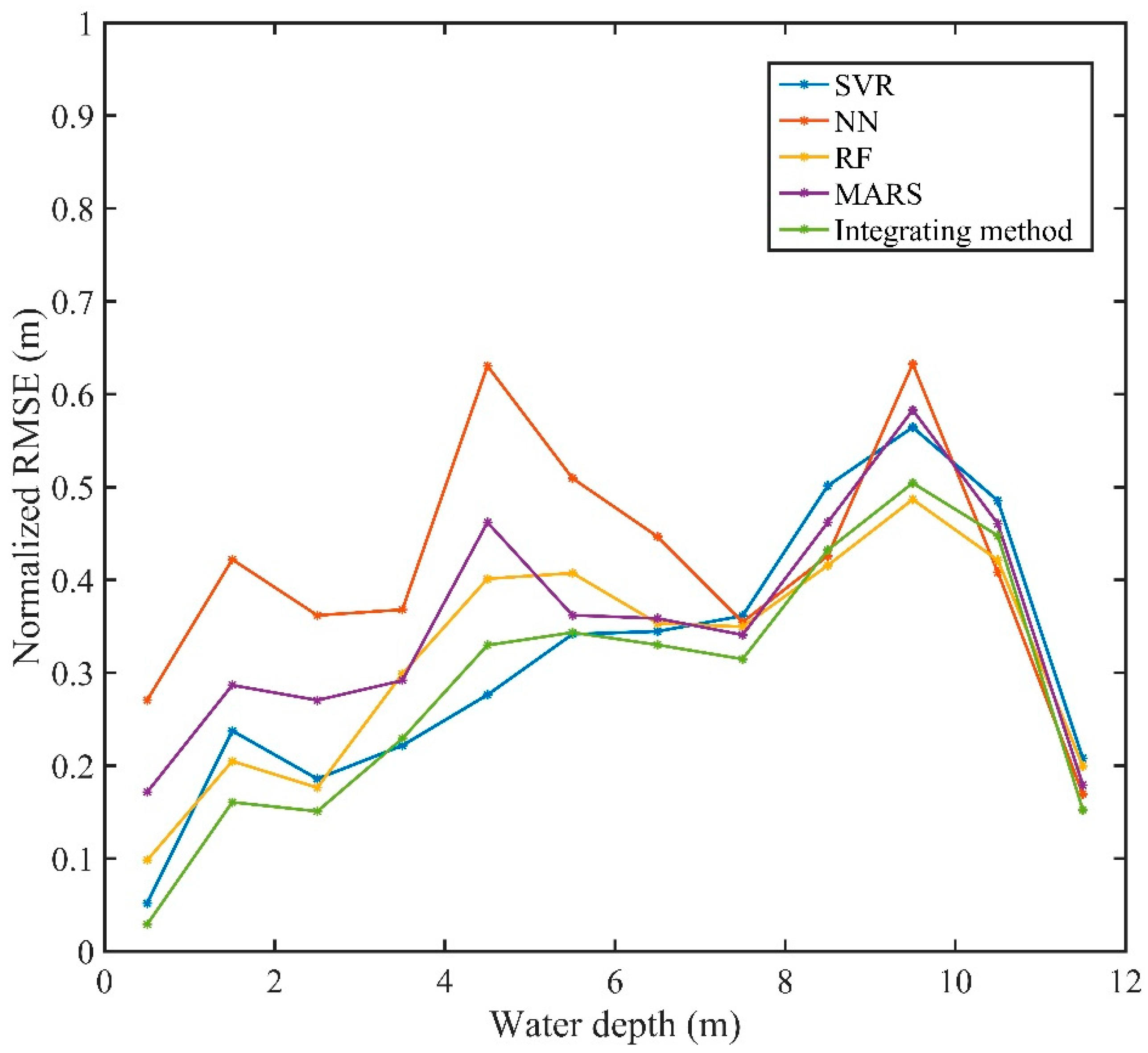
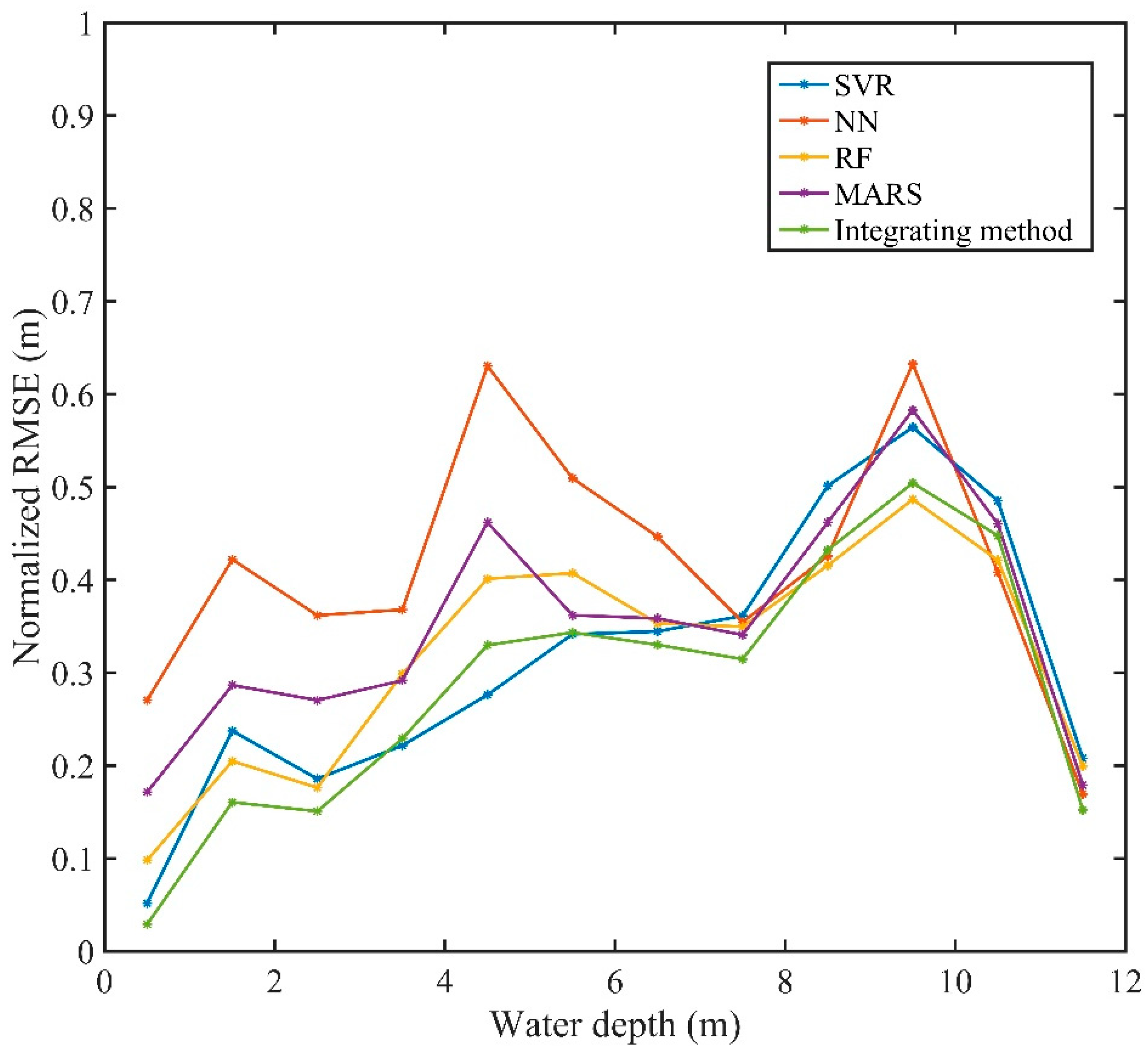
Although the normalized RMSE is greatly affected by the distribution of verification points, it is still an important index with which to measure the accuracy of water depth retrieval. As shown in
Figure 6, the normalized RMSE with different water depth range of different methods was plotted. At 0–3 m, the accuracy of the integration method is the highest and that of the neural network is the worst. However, at 3–6 m, the error of the integration method is higher than that of SVR, which is not the optimal method. The error of the integration method is the smallest at 6–9 m, and the error of RF is the smallest in the range greater than 9 m. It can be seen that the optimal algorithms in different water depth ranges are different, but in conclusion, the error of the integrated method is the smallest, and this result from
Figure 6 is consistent with
Table 1, which means the integrated method can be used in the water depth retrieval of the port.
As Nanshan port is an open port, the ambient water environment is significantly affected by other factors, especially the sediment content. Although no turbidity measurements are available on site, the geographical environment and the remote-sensing image data indicate that Nanshan port is particularly and greatly affected by sedimentation. In fact, the water depth estimation errors of all methods are relatively large, where the RMSE is typically more than 1 m. This RMSE is much higher than the 0.44 m RMSE value of Luarca port at the depth range of 0–12 m [
16], and is also much higher than the 0.44-m RMSE value of the turbid waters studied in [
19], (where the RMSE was obtained using WorldView-2 data and the Lyzenga method). Due to the availability of a large number of bathymetric in situ data sets for our study, the selected verification and training points do not coincide completely. This eliminates the autocorrelation problem that typically occurs in other machine learning methods for bathymetric estimation. The first set of machine learning results also affect the water depth estimation. The learning parameters of all models are all set up appropriately. In fact, different parameter settings could lead to different estimation results. However, the depth inversion results based on the ensemble training are still better than the single-model ones. Meanwhile, the water depth mapping results are also affected by the image quality and the processing methods.
6. Conclusions
In this paper, a water depth estimation method is proposed for turbid seaport environments. This method combines several training datasets and machine learning algorithms. The results obtained from a single training dataset are compared with those obtained using multiple datasets. Because all spectral bands are affected by water attenuation and reflections of the seabed, the band ratio method is not suitable for water depth estimation. Moreover, the machine learning algorithms show clearly different estimates of water depth. By contrast, the ensemble learning methods can combine such algorithms to further improve the depth estimation accuracy and generally reduce the RMSE by 0.1 m. The depth estimates obtained based on multiple datasets are better than those based on individual datasets, with lower RMSE values and higher R2 values. The experimental results show that the proposed method can improve the depth estimates to a certain extent with a RMSE of 1.07 m for the depth range of 0–13 m. The inversion accuracy for all water depth levels is very high, except for the water channel were the depth exceeds 9 m. This drop in performance can be ascribed to the fact that the water quality conditions are similar, the water depth is very large, and the remote-sensing reflectance data cannot then correctly reflect the change in the water depth. Although the number of training samples has a visible impact on the depth estimation performance, the overall trend is largely unaffected. Since there is no clear relationship between the observed results and the estimated physical parameters, the proposed method can potentially be extended to estimate other physical parameters (including water turbidity and sediment content) based on remote-sensing image analysis.
In summary, the proposed method combining multiple training datasets and machine learning methods is effective in estimating water depth from satellite images, and this method is indeed better than those based on individual training datasets. Due to the non-parametric nature of the machine learning method, it can successfully retrieve the water depth from the observed satellite images with a relatively higher degree of coherence and consistency compared to the depth estimates made by the acoustic method. In future work, the water depth estimation accuracy can be improved through atmospheric correction algorithms for high-resolution remote-sensing images. These algorithms can be applied with ensemble learning to deal with different depths of coastal turbid water.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}