
A Preliminary Global Automatic Burned-Area Algorithm at Medium Resolution in Google Earth Engine



Abstract
:
1. Introduction
2. Methodology
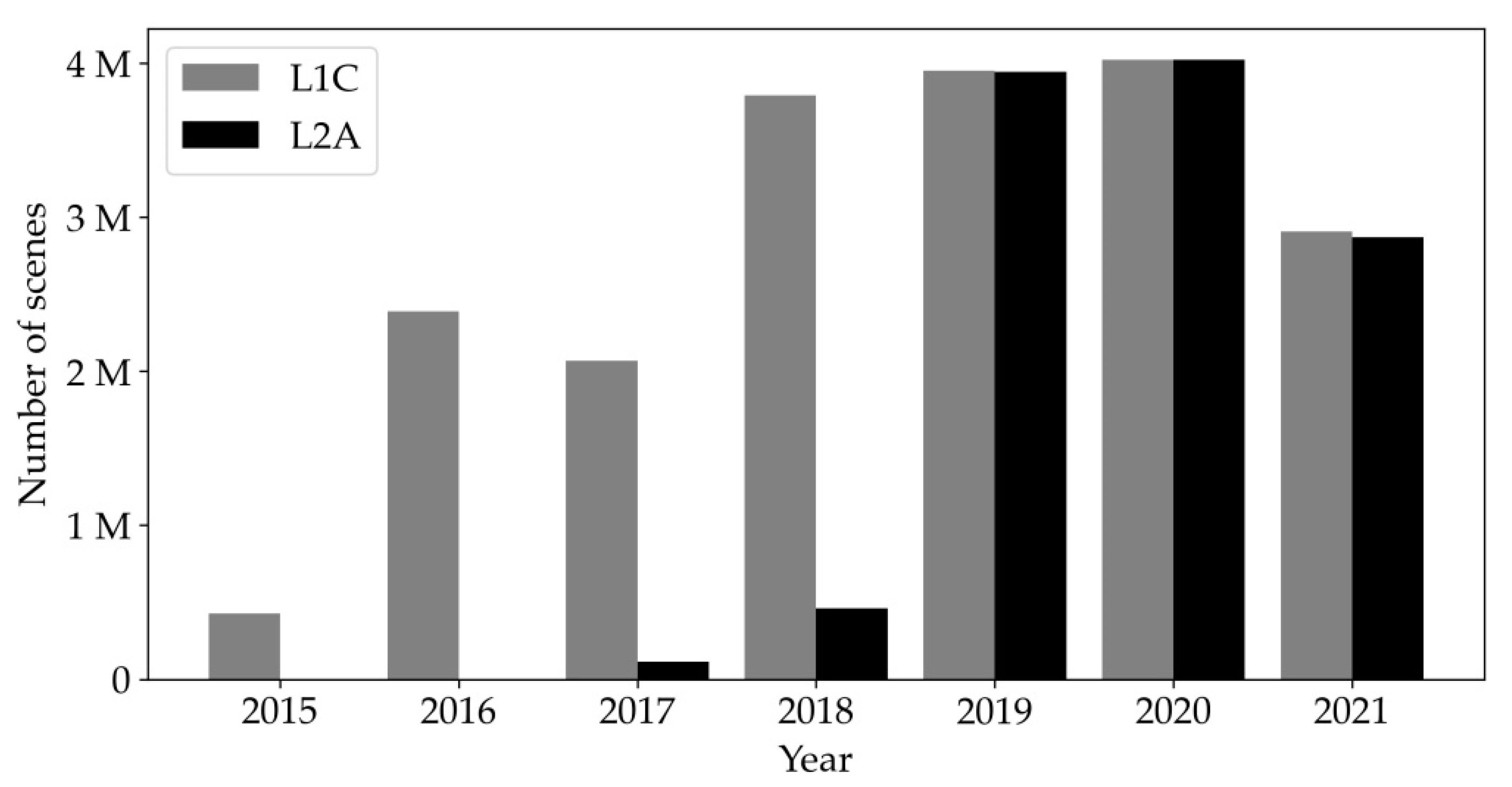
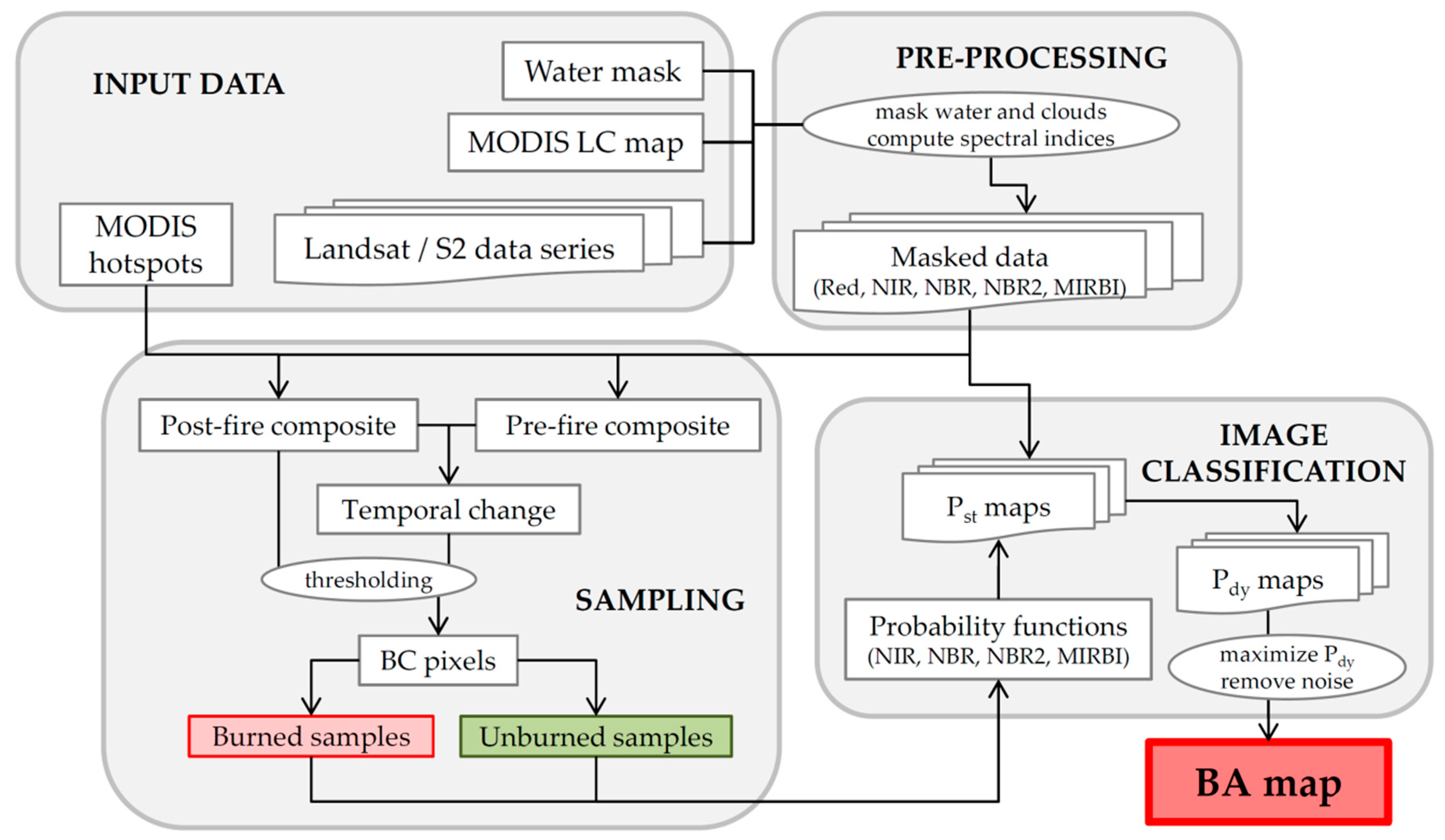
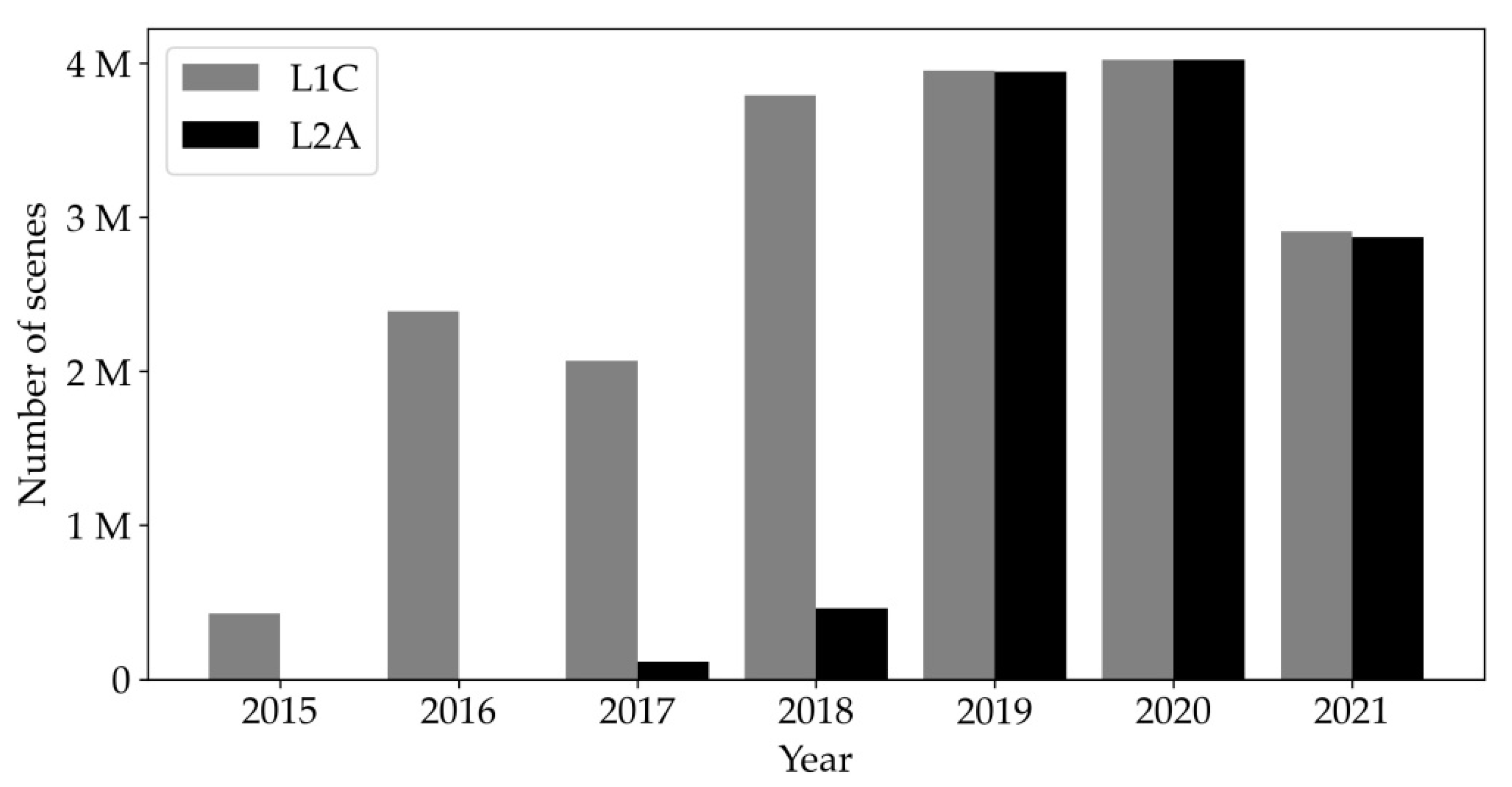
2.1. Input Data
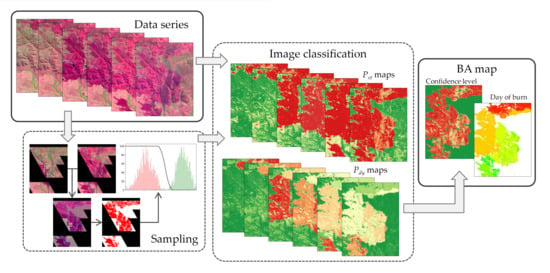
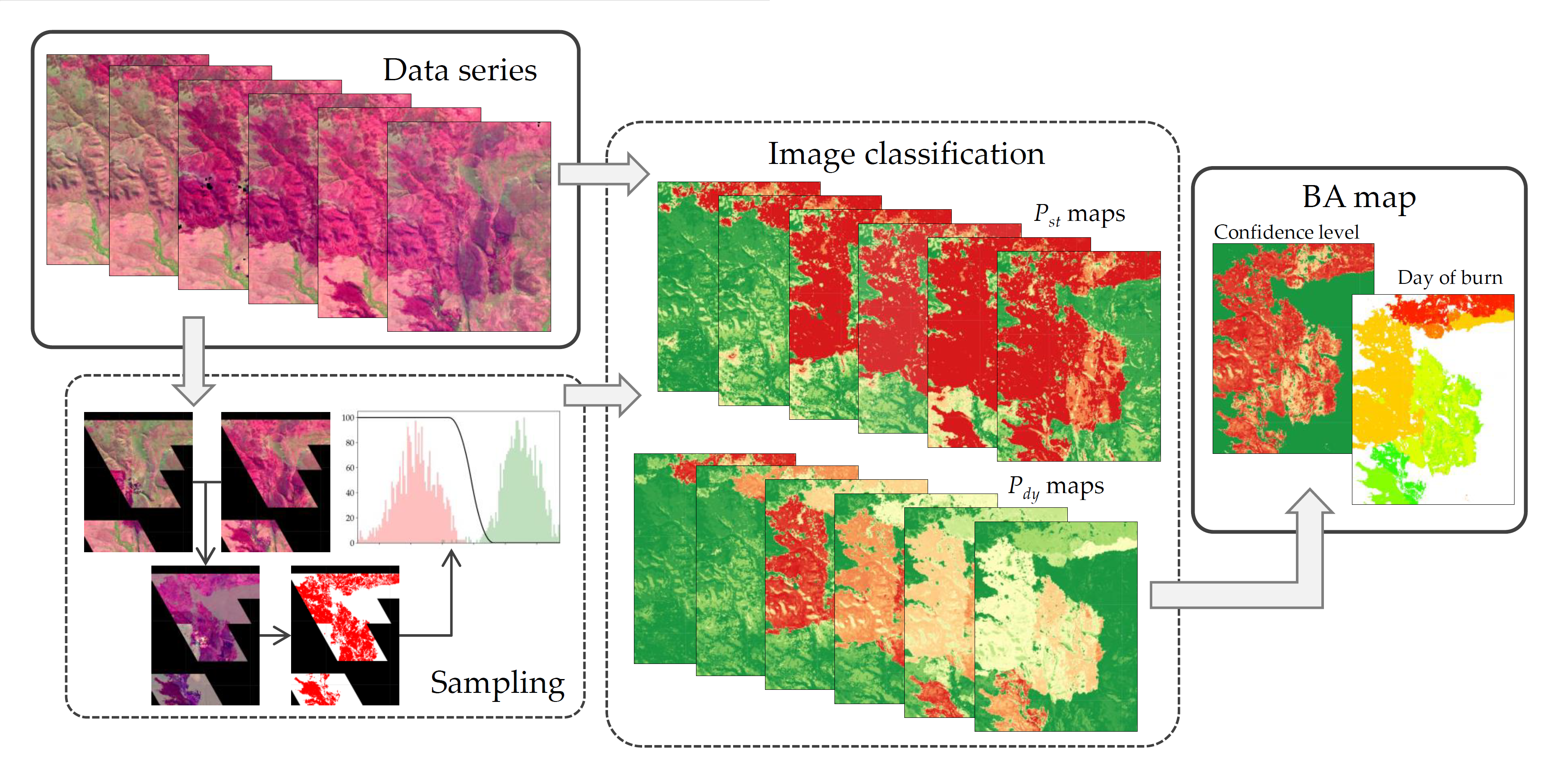
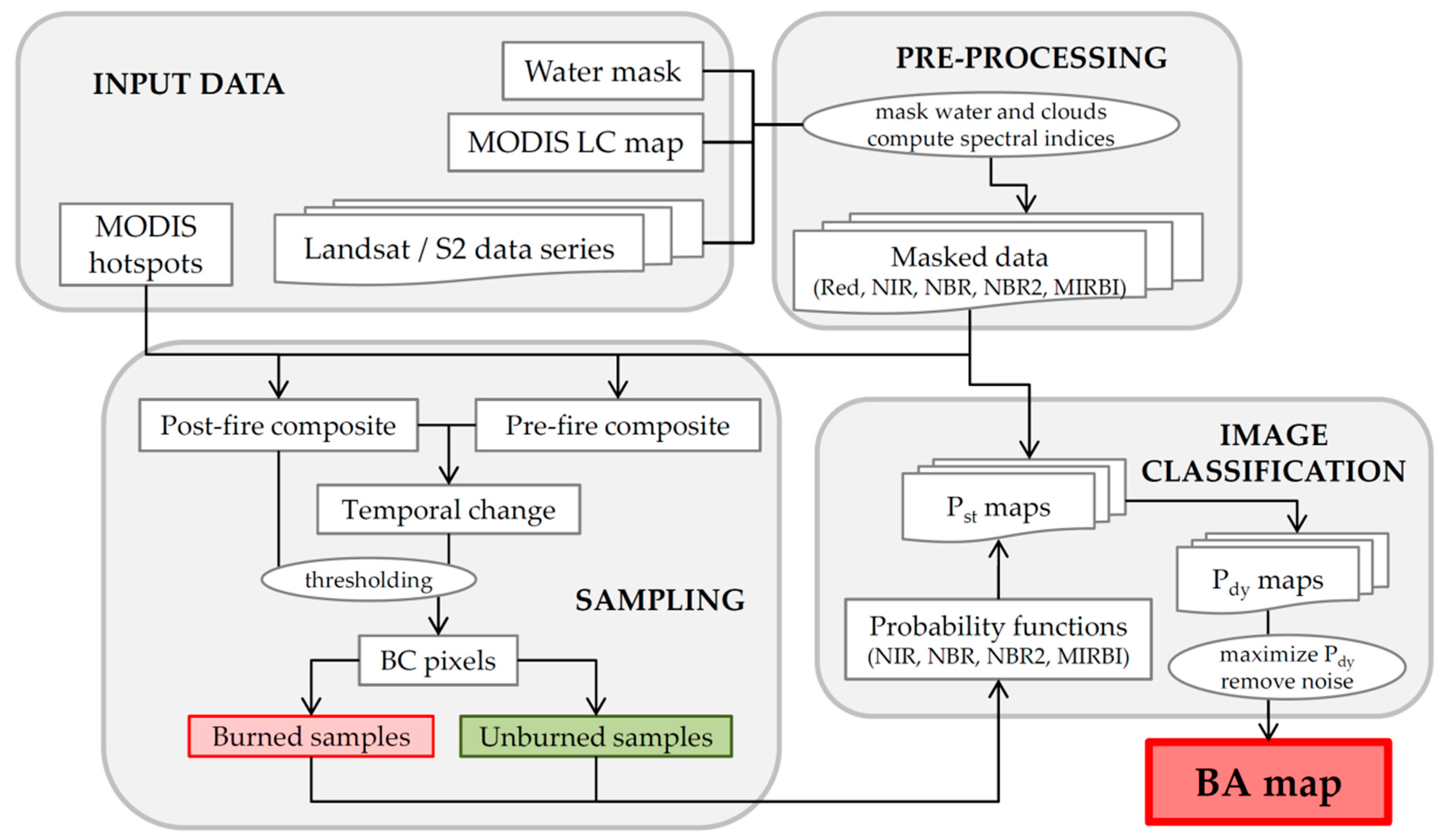
2.2. Algorithm
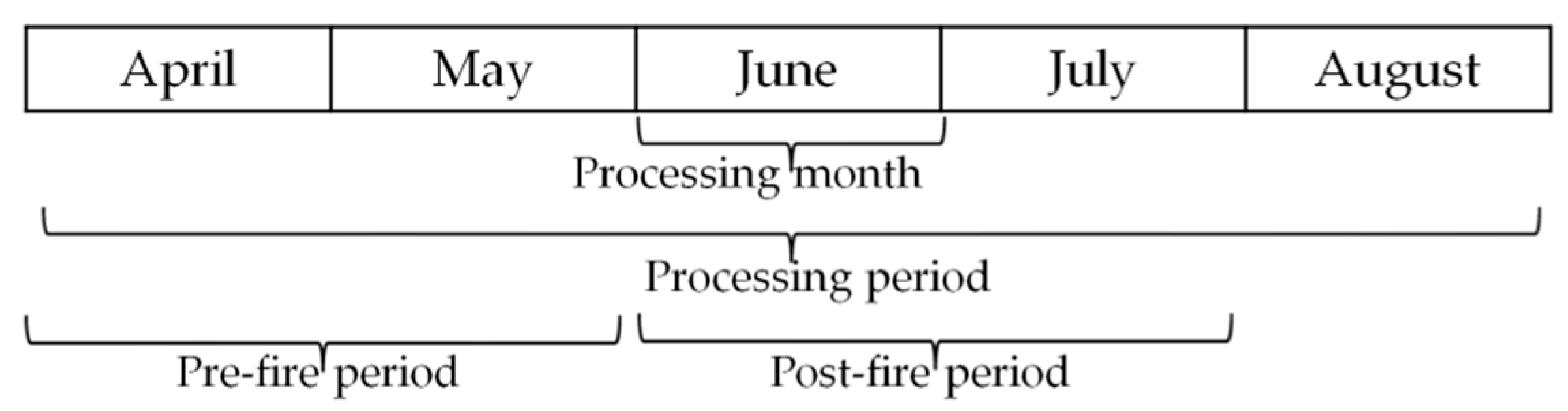
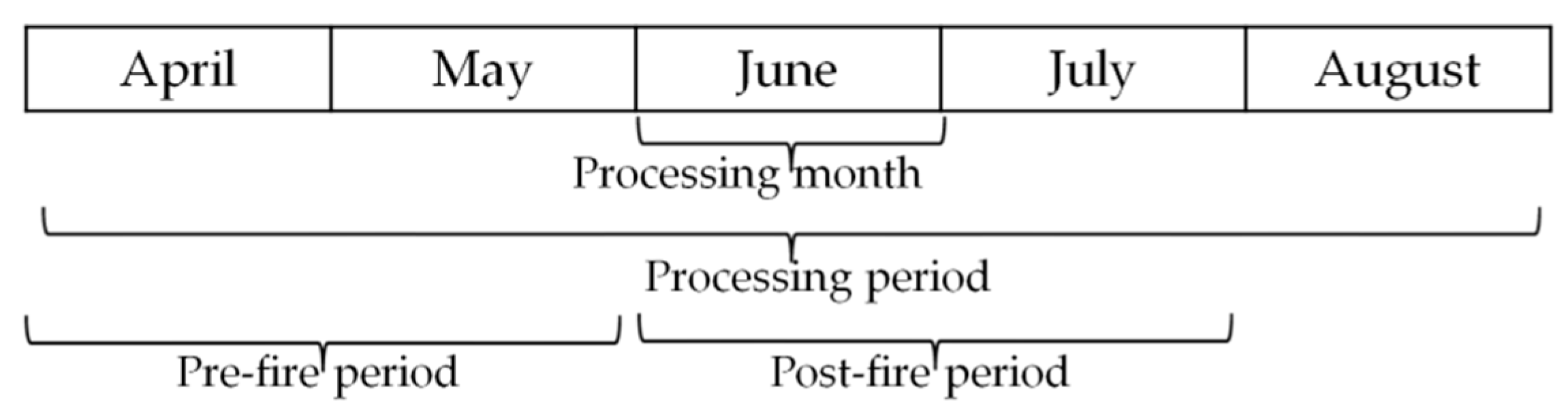
2.2.1. Pre-Processing
- Images with a cloud percentage over 90%
- Images with a cloud percentage over 80%
- Images with a cloud percentage over 70%
- Images with a cloud percentage over 60%
- Images with a cloud percentage over 50%
- Images from the first and last months of the original 5-month-long period
- Images from the first half of originally the second month, and from the last half of originally the fourth month
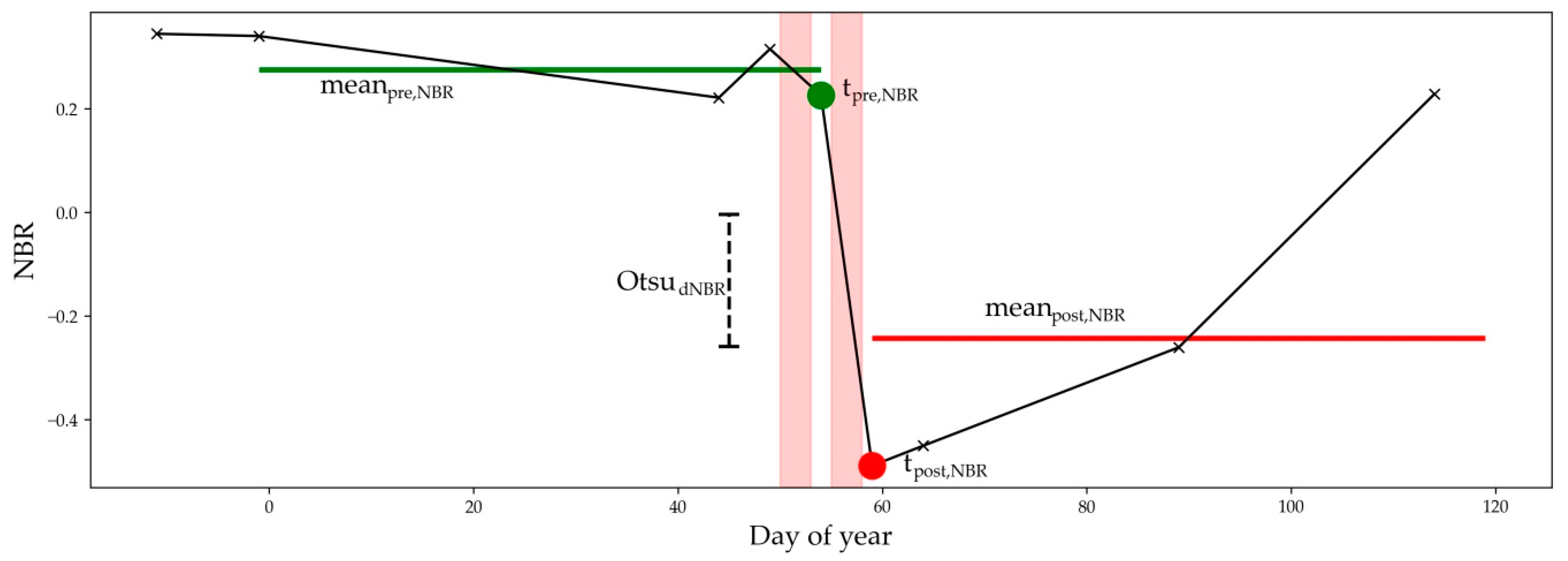
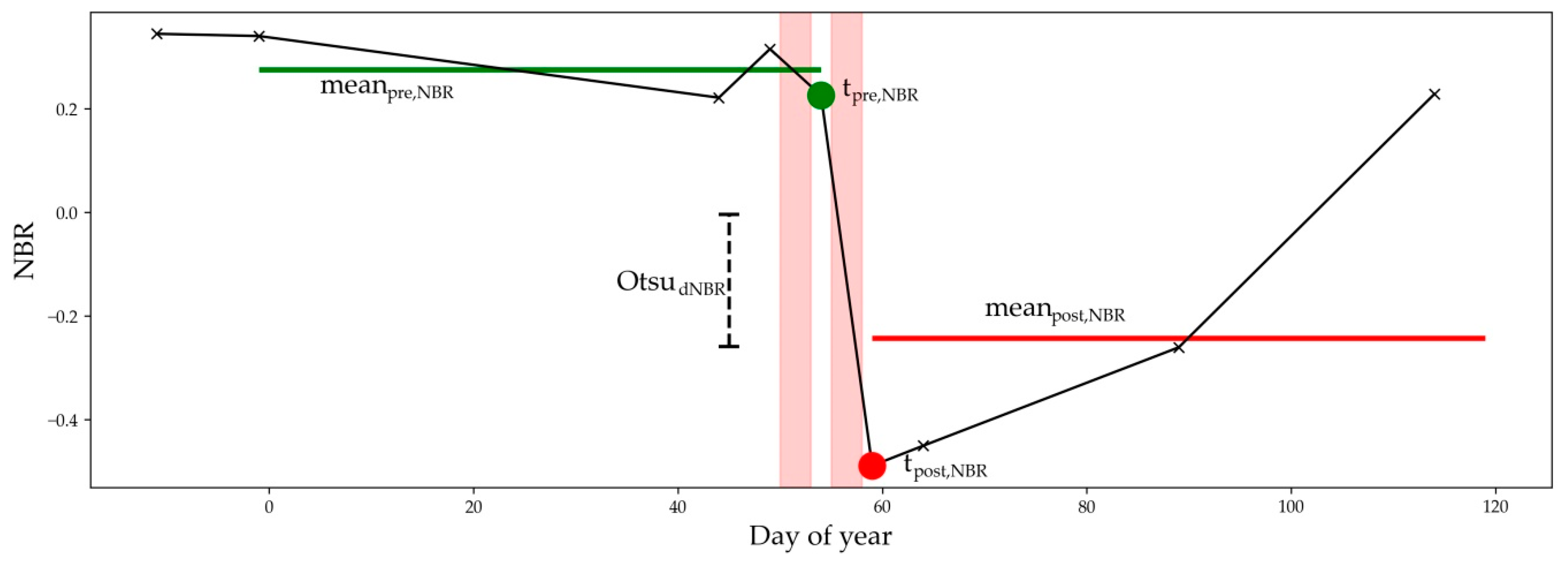
2.2.2. Sampling
- Temporal change of NBR, NBR2, and MIRBI spectral indices and NIR reflectance: dNBR, dNBR2, dMIRBI, and dNIR
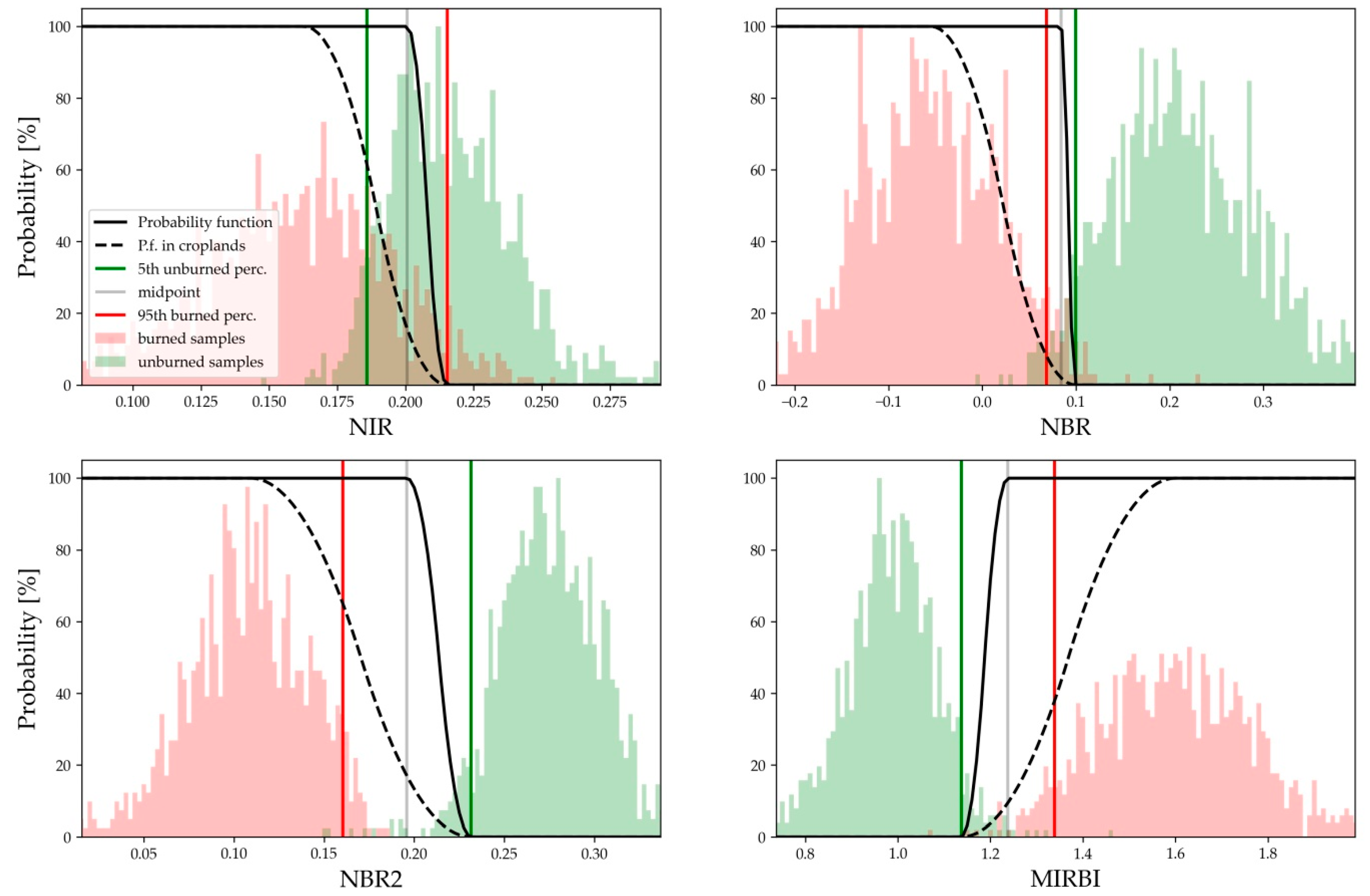
- NBR, NBR2, and MIRBI spectral indices at tpost
- Red reflectance at tpost
- In the first group of bands, pixels must be labeled as BC in at least 3 out of 4 bands (BCdNBR, BCdNBR2, BCdMIRBI, and BCdNIR)
- In the second group, they must be labeled as BC in at least 2 out of 3 bands (BCpost,NBR, BCpost,NBR2 and BCpost,MIRBI)
- In the third group, being labeled as BC in the Red reflectance band at tpost (BCpost,Red) is mandatory
- Hotspots filtered temporally between composites’ dates must cover a minimum surface of 5 km2 in the whole MGRS tile
- Burned candidate pixels must cover a minimum surface of 1 km2
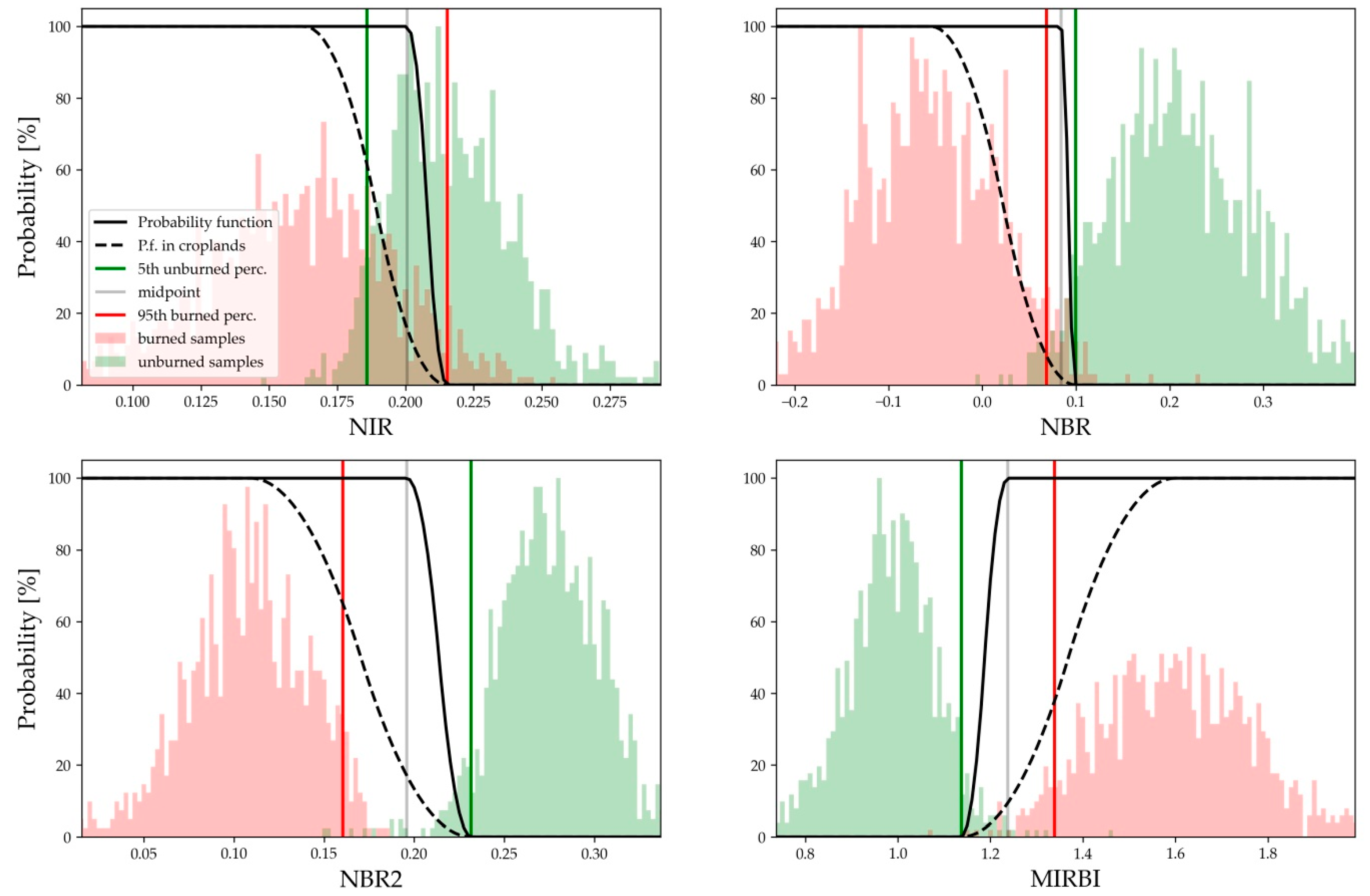
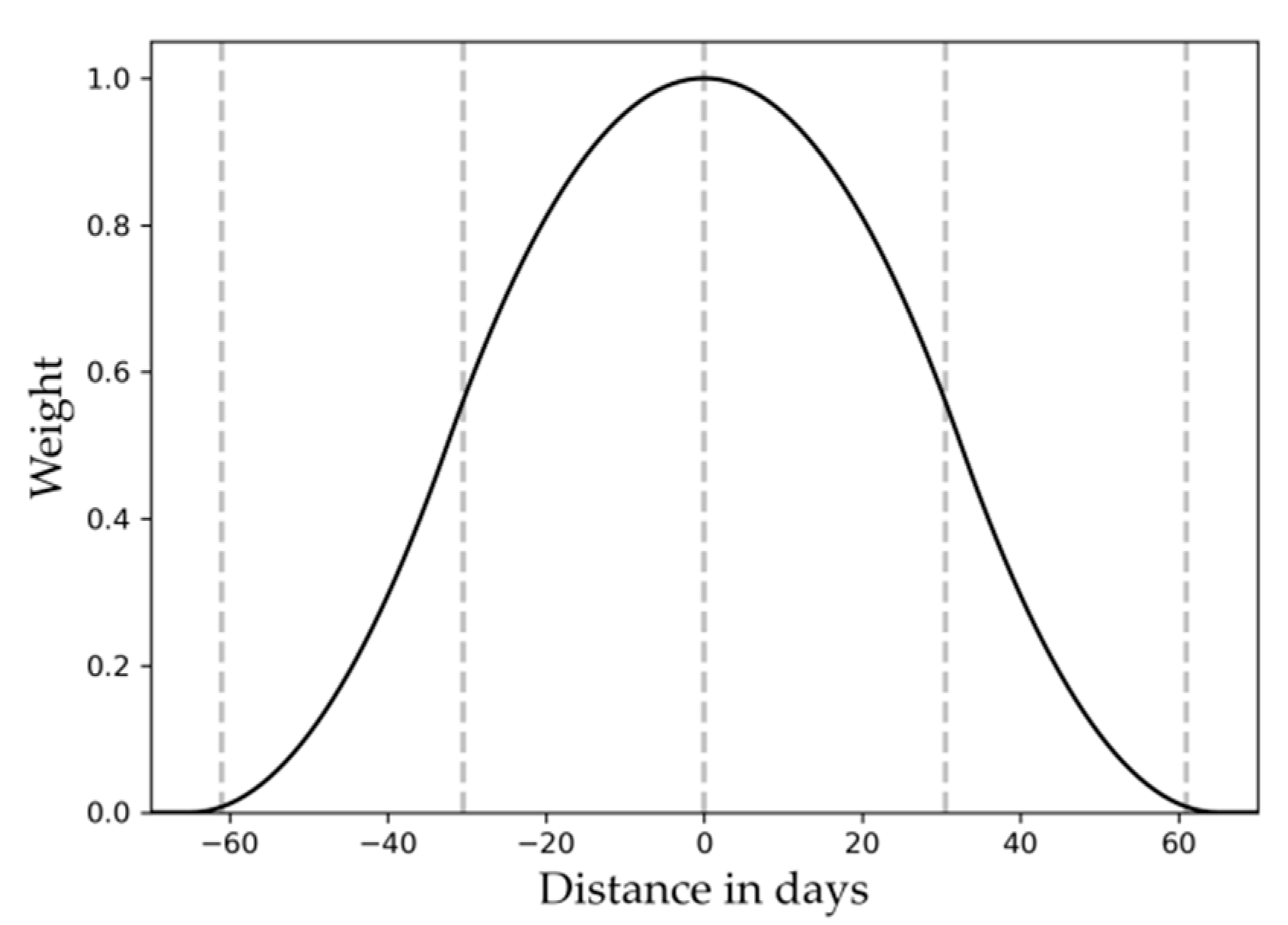
2.2.3. Image Classification
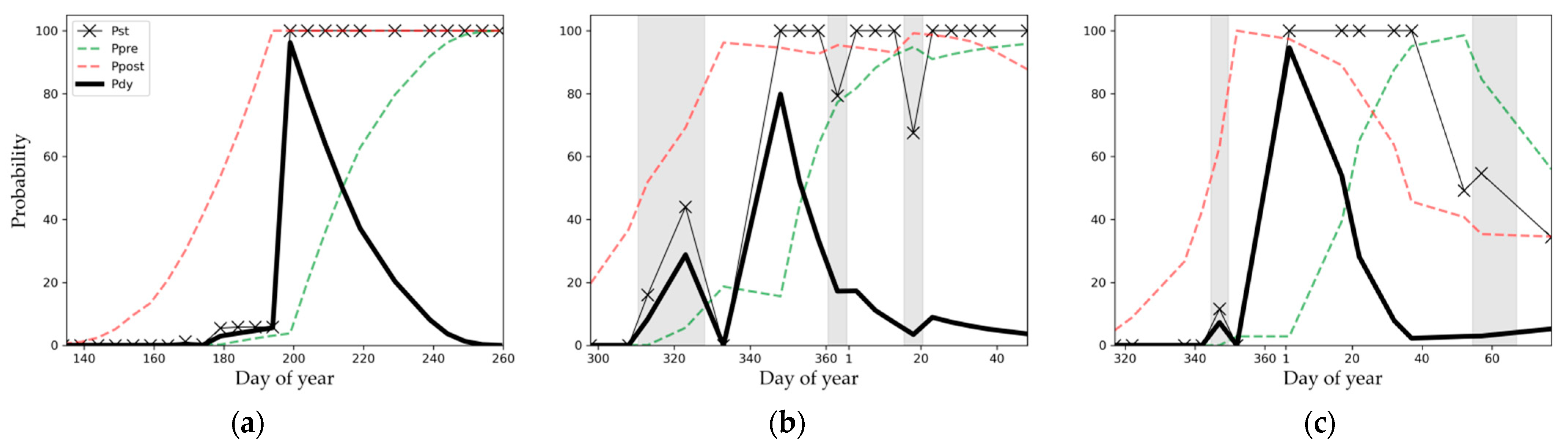
- Ppre: mean Pst during previous two months, up to the corresponding date
- Pt: Pst on the corresponding date
- Ppost: mean Pst during next two months, immediately after the corresponding date
2.3. Quality Assurance
2.3.1. Reference Data
2.3.2. Accuracy Metrics
2.3.3. Reporting Accuracy
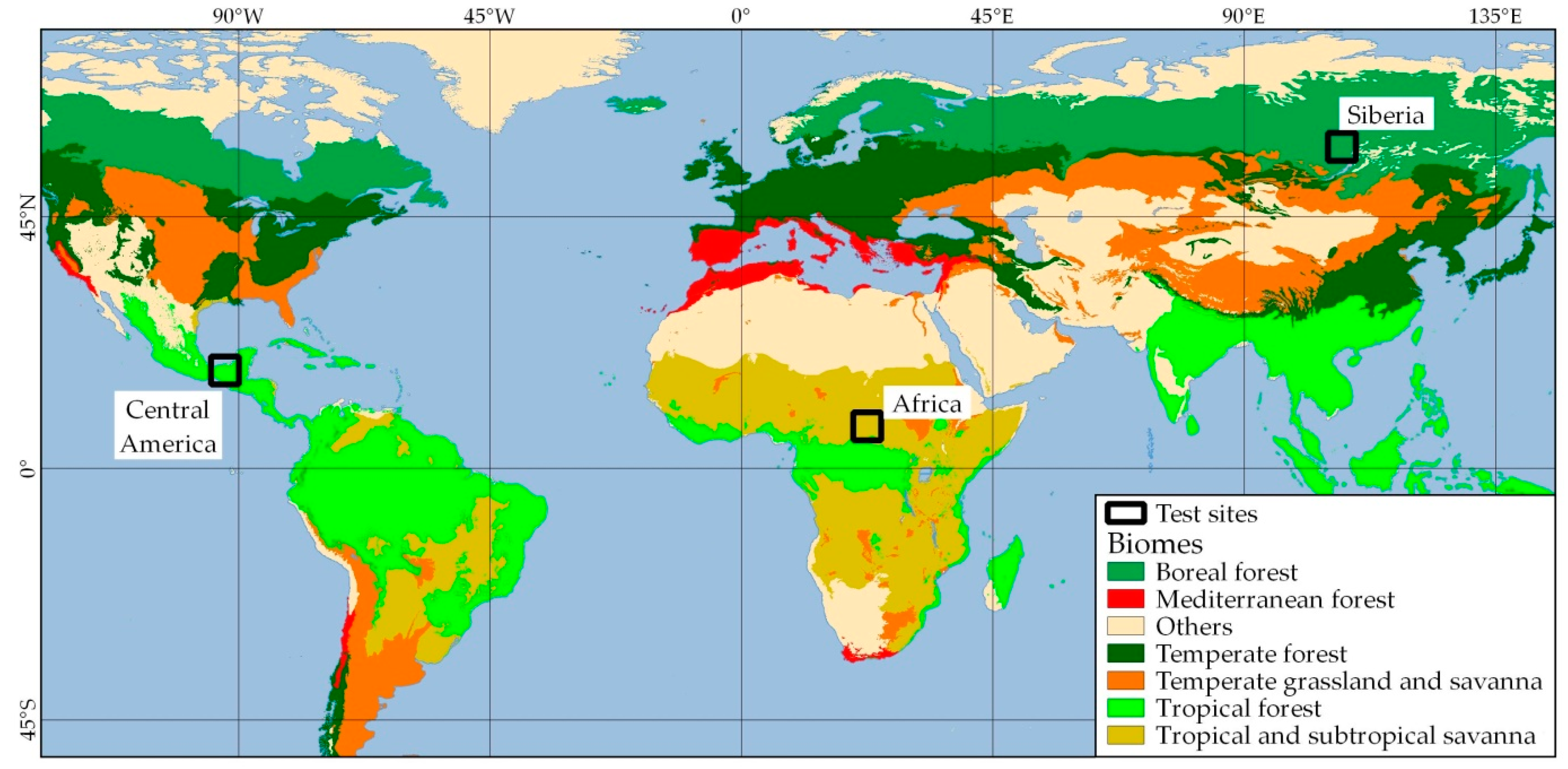
2.4. Test Sites
3. Results
3.1. Algorithm
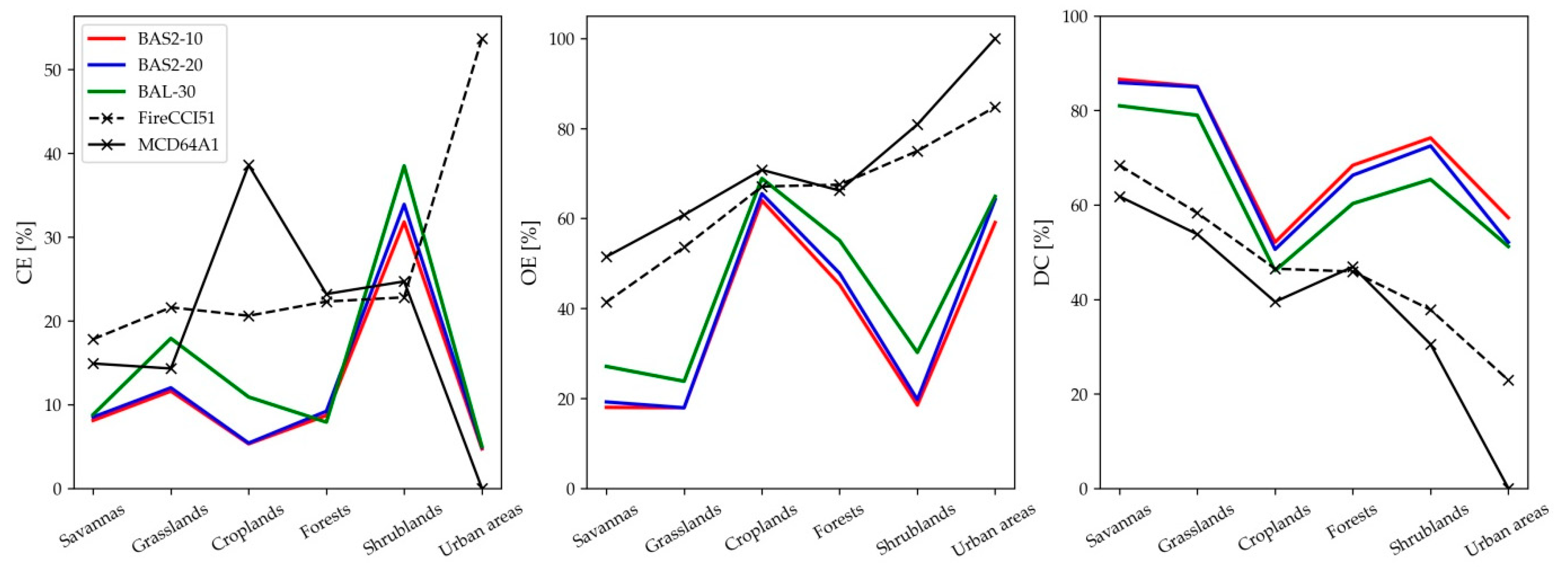
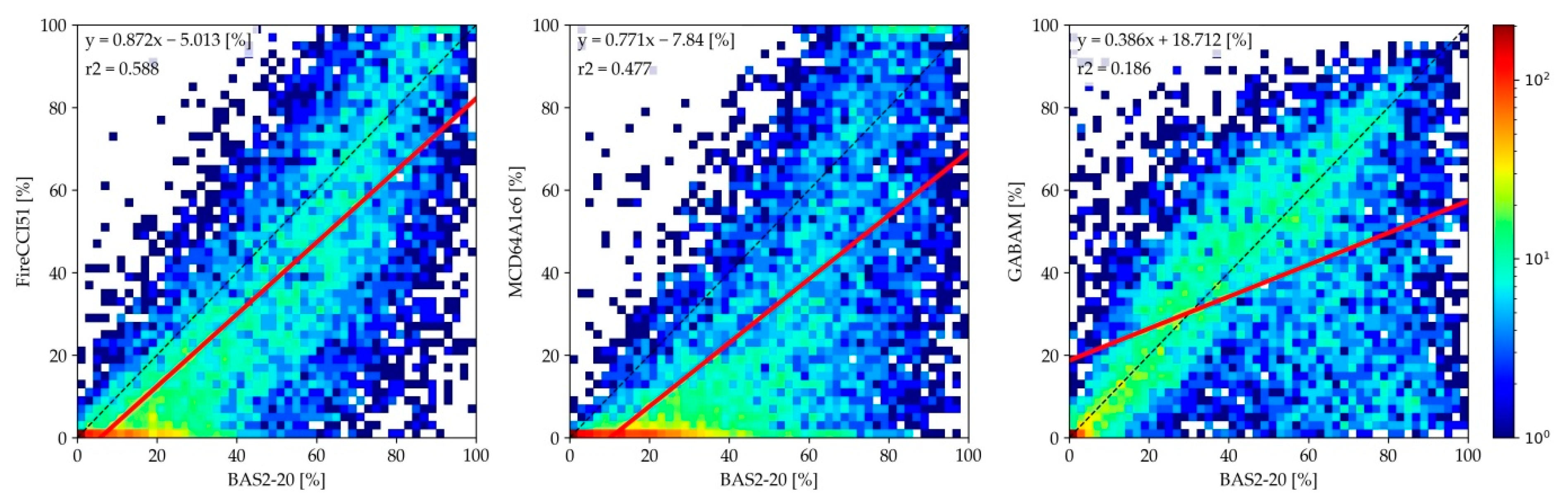
3.2. Accuracy Metrics
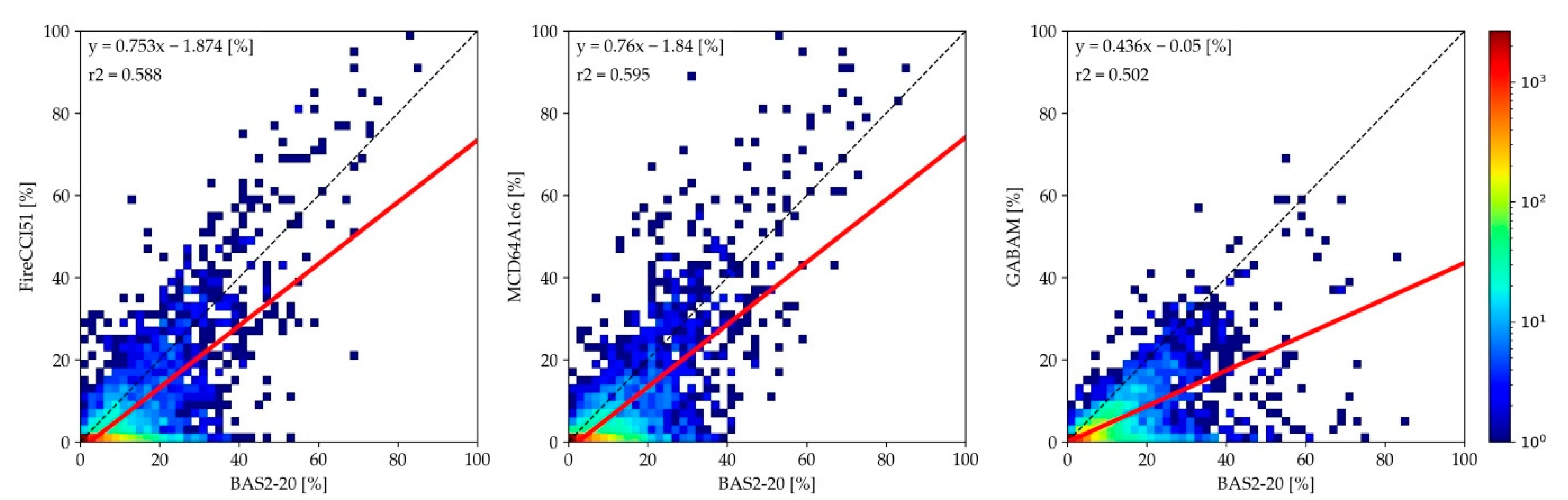
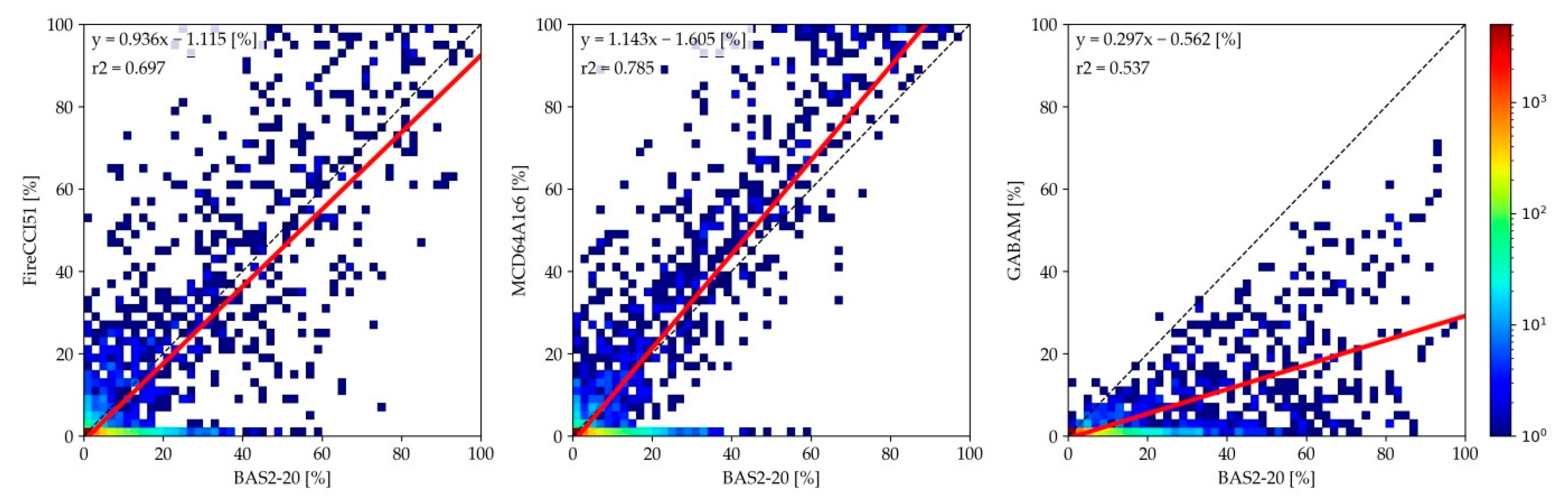
3.3. Reporting Accuracy
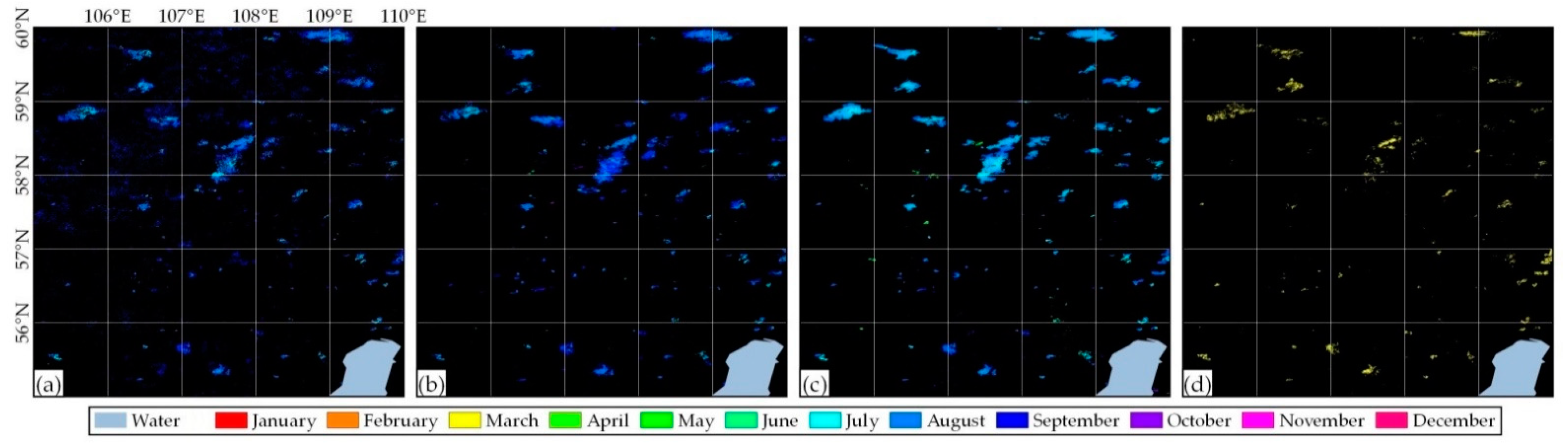
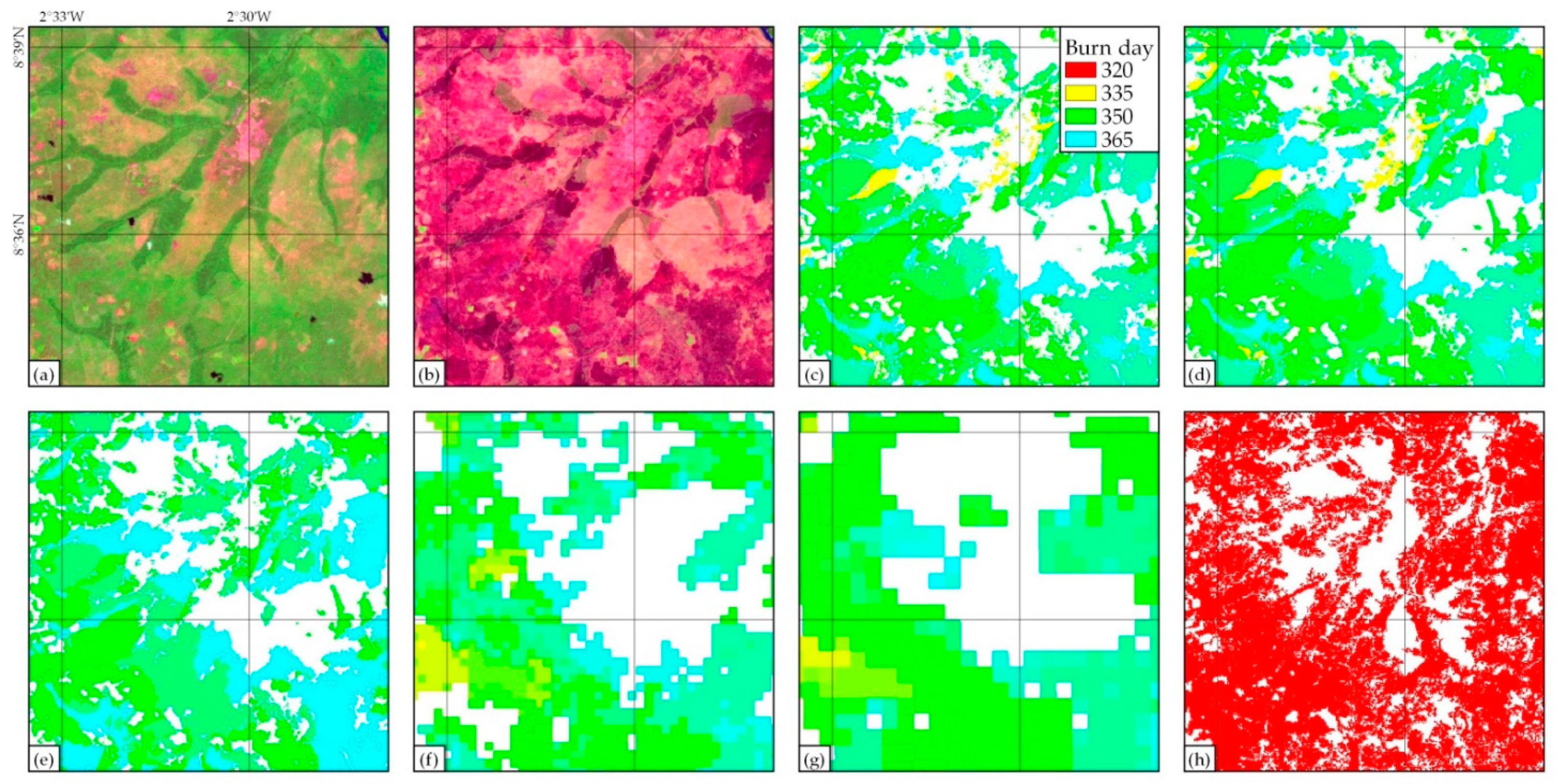
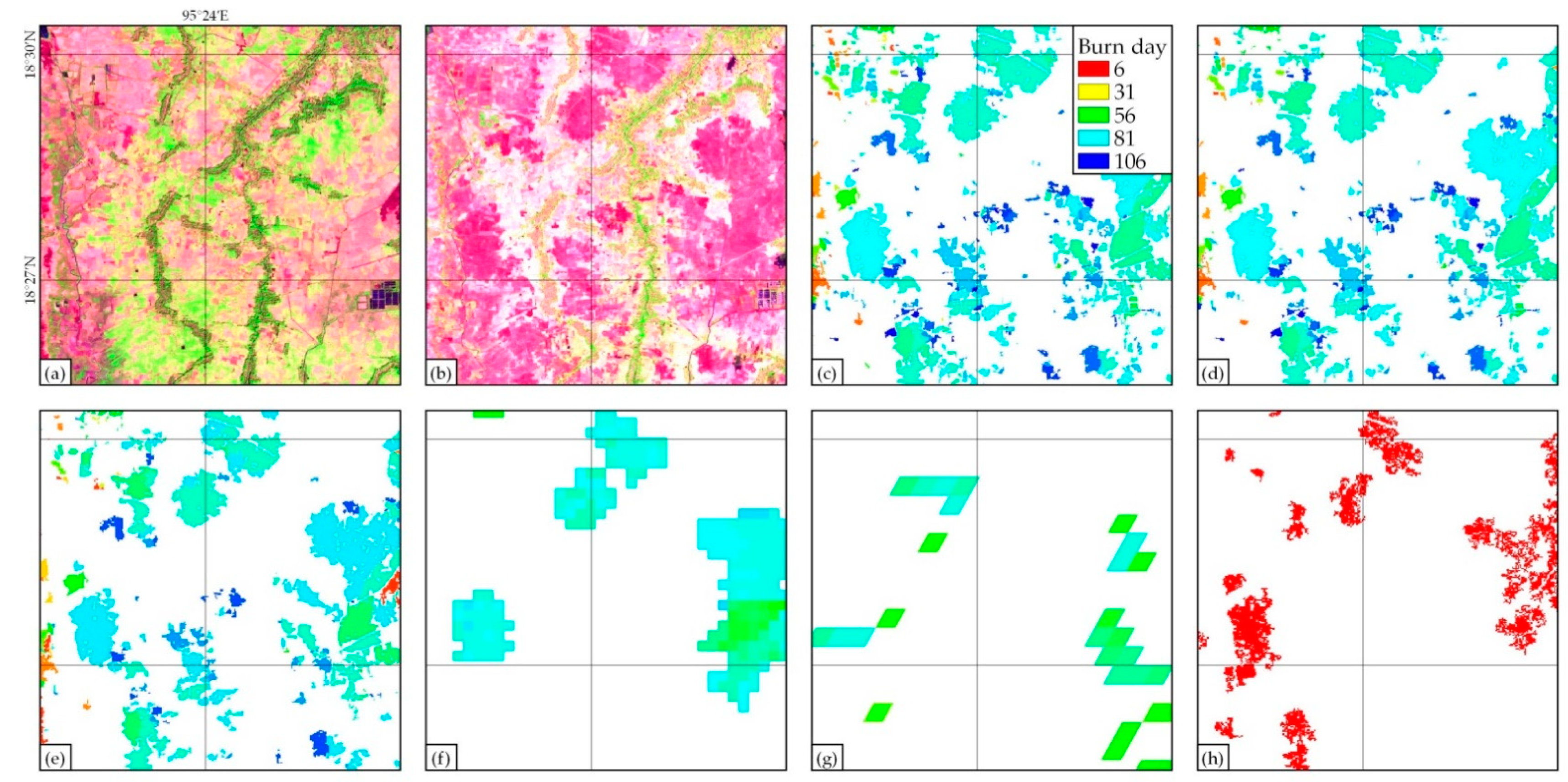
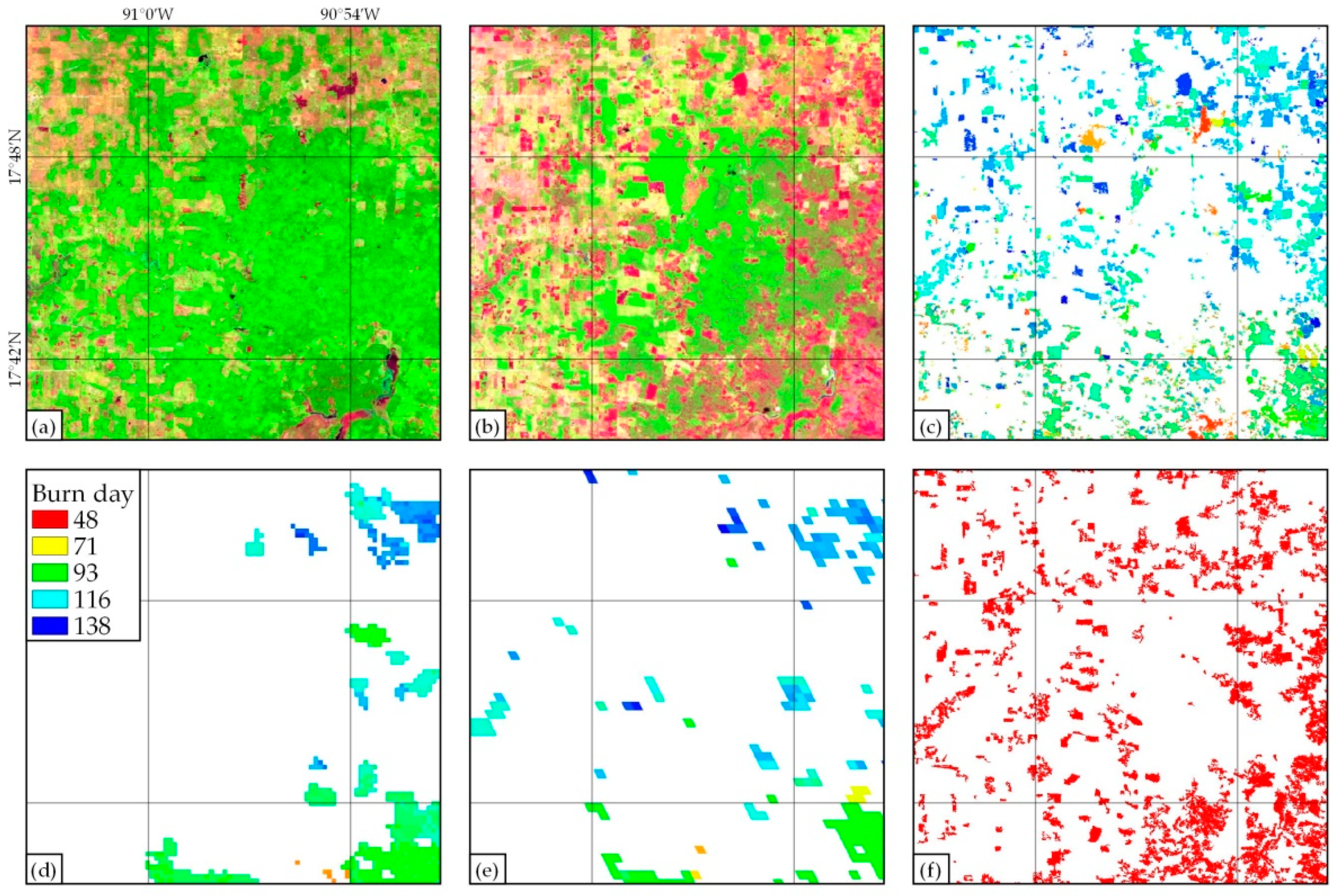
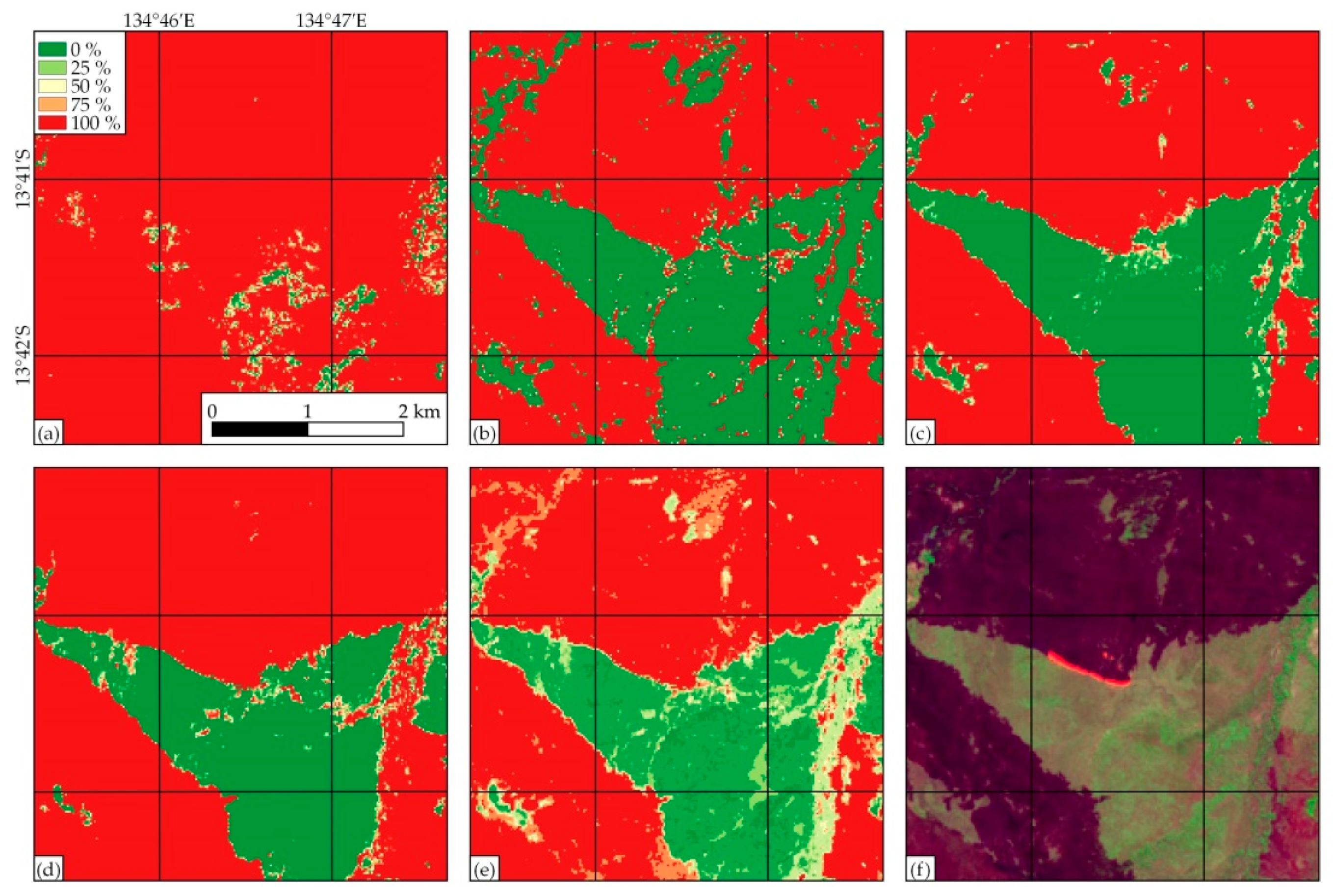
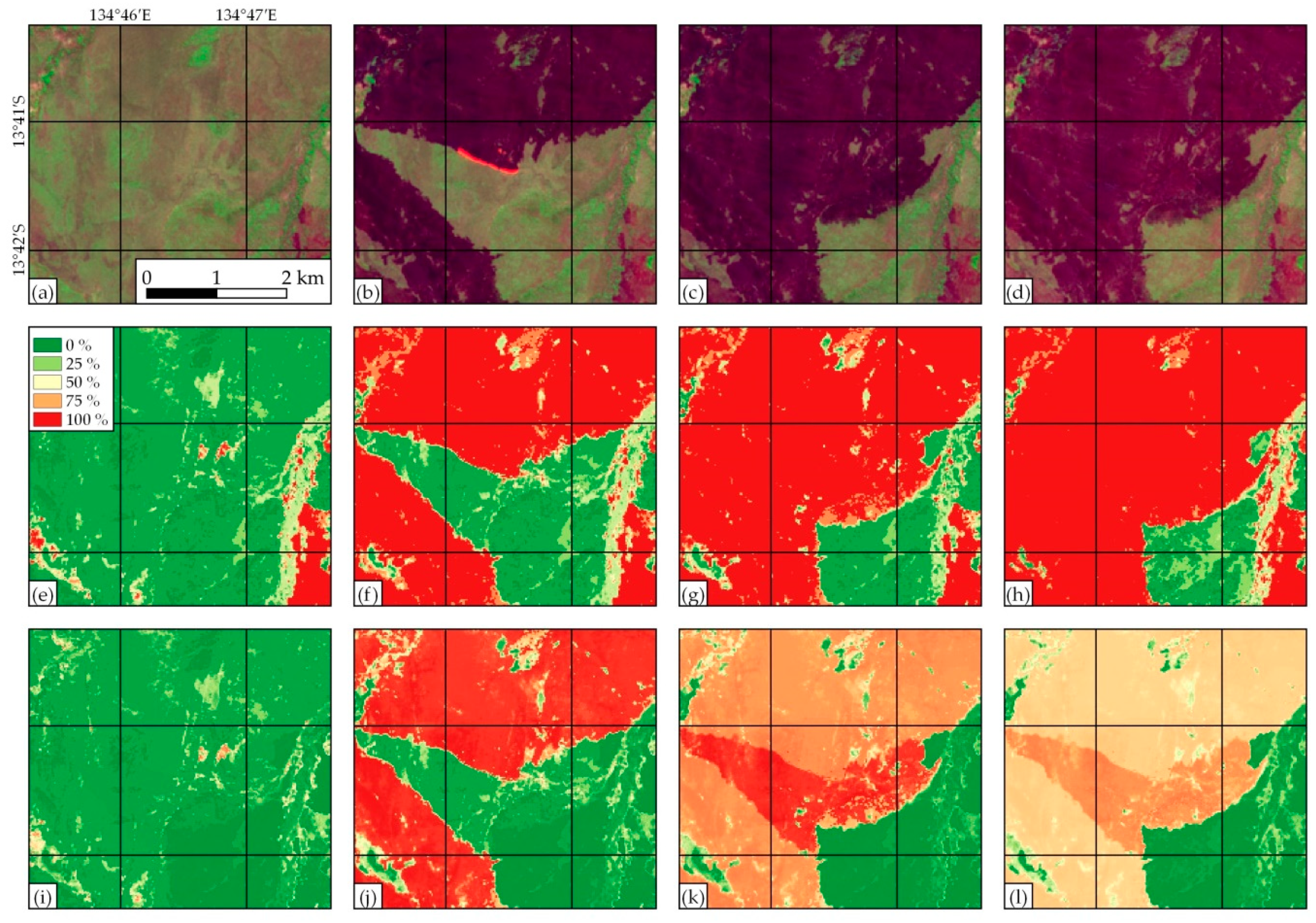
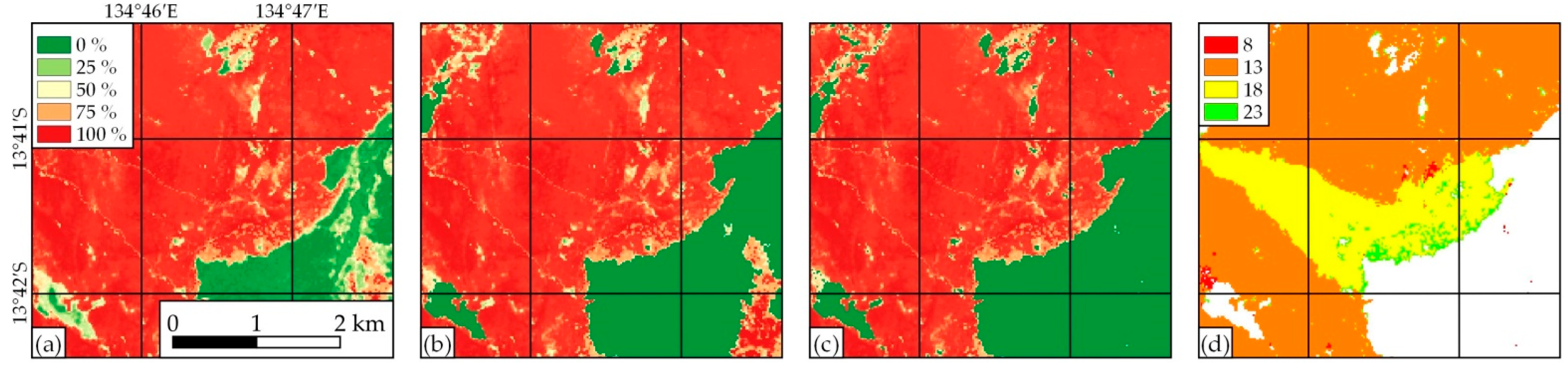
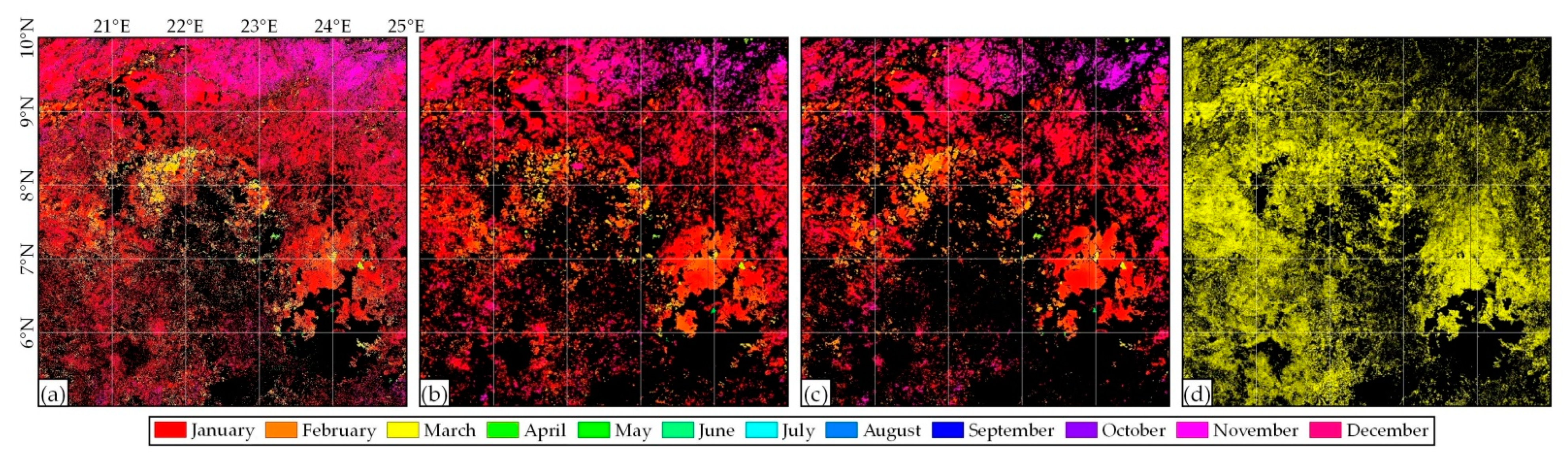
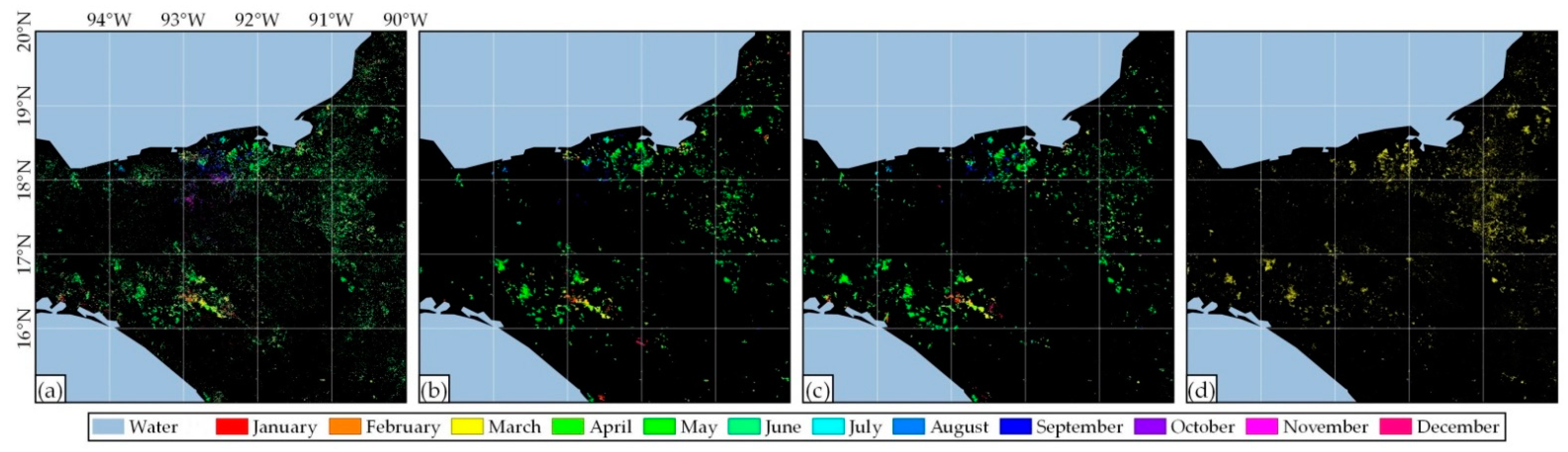
3.4. Test Sites
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Biome | Tile | First Date | Last Date | Length (Days) | Fire Activity | Number of Images |
|---|---|---|---|---|---|---|
| Boreal forest | 49WFM | 20190617 | 20190913 | 88 | high | 5 |
| 42VWN | 20190716 | 20191004 | 80 | high | 2 | |
| Mediterranean forest | 31SEA | 20190415 | 20190902 | 140 | high | 9 |
| Others | 38RQU | 20190111 | 20190327 | 75 | high | 2 |
| 42RXT | 20190114 | 20191205 | 325 | high | 24 | |
| 42RXU | 20190114 | 20191205 | 325 | high | 25 | |
| 34JHT | 20190103 | 20191219 | 350 | low | 13 | |
| Temperate forest | 49SFC | 20190630 | 20191028 | 120 | high | 7 |
| 56HLJ | 20190101 | 20191231 | 364 | high | 14 | |
| 16SBF | 20190317 | 20191102 | 230 | high | 6 | |
| Temperate grassland and savanna | 36LVQ | 20190417 | 20191103 | 200 | high | 10 |
| 36PUQ | 20190103 | 20190403 | 90 | high | 6 | |
| 44TPP | 20190515 | 20191029 | 167 | high | 3 | |
| 37UGQ | 20190401 | 20191124 | 237 | low | 12 | |
| Tropical and subtropical savanna | 33LYE | 20190430 | 20191106 | 190 | high | 13 |
| 33LWK | 20190418 | 20190920 | 155 | high | 11 | |
| 35LNF | 20190503 | 20191109 | 190 | high | 12 | |
| 30NYP | 20190102 | 20190313 | 70 | high | 6 | |
| 35LKH | 20190501 | 20191102 | 185 | high | 11 | |
| 34MCV | 20190609 | 20190917 | 100 | high | 7 | |
| 31PCN | 20191016 | 20191230 | 75 | high | 6 | |
| 37LDD | 20190801 | 20191204 | 125 | high | 10 | |
| 36LWH | 20190708 | 20191105 | 120 | high | 8 | |
| 37LDE | 20190523 | 20191119 | 180 | high | 10 | |
| 35NPF | 20190106 | 20190312 | 65 | high | 6 | |
| 36MVS | 20190522 | 20191014 | 145 | high | 10 | |
| 55LBC | 20190507 | 20191213 | 220 | high | 8 | |
| 35NPJ | 20190923 | 20191227 | 95 | high | 5 | |
| 30PWQ | 20191116 | 20191231 | 45 | high | 5 | |
| 34PHR | 20191029 | 20191228 | 60 | high | 6 | |
| 33MXT | 20190607 | 20190831 | 85 | low | 6 | |
| 52LHJ | 20190127 | 20191223 | 330 | low | 8 | |
| 30PWR | 20190110 | 20190420 | 100 | low | 8 | |
| 34KCD | 20190124 | 20191210 | 320 | low | 15 | |
| 21KYR | 20190916 | 20191230 | 105 | low | 4 | |
| 31PBQ | 20190117 | 20190407 | 80 | low | 4 | |
| 34KBC | 20190107 | 20191213 | 340 | low | 10 | |
| 34PCU | 20190113 | 20190428 | 110 | low | 5 | |
| 37PDP | 20190815 | 20191228 | 135 | low | 5 | |
| Tropical forest | 46QFL | 20190101 | 20190531 | 150 | high | 13 |
| 28PGT | 20190102 | 20190527 | 145 | high | 10 | |
| 47QLC | 20190113 | 20190428 | 105 | high | 8 | |
| 46QFG | 20190101 | 20190426 | 115 | high | 9 | |
| 21MZP | 20190701 | 20190830 | 60 | high | 4 | |
| 46QGF | 20190101 | 20190421 | 110 | high | 10 | |
| 48PVU | 20190106 | 20190411 | 95 | high | 6 | |
| 47QRA | 20190117 | 20190422 | 95 | high | 9 | |
| 21LXH | 20190427 | 20191004 | 160 | low | 7 | |
| 23LQF | 20190422 | 20191113 | 205 | low | 4 | |
| 20LKN | 20190509 | 20190916 | 130 | low | 2 |
| MGRS Tile | BAS2-10 | BAS2-20 | BAL-30 | FireCCI51 | MCD64A1 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CE | OE | DC | CE | OE | DC | CE | OE | DC | CE | OE | DC | CE | OE | DC | |
| 49WFM | 77.6 | 0.7 | 36.5 | 79.7 | 0.4 | 33.7 | 46.0 | 3.6 | 69.2 | 20.0 | 22.7 | 78.7 | 8.4 | 12.4 | 89.6 |
| 42VWN | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | - | - | - | - | - | - | - | - | - |
| 31SEA | 2.7 | 30.5 | 81.1 | 2.5 | 30.6 | 81.1 | 3.3 | 36.1 | 77.0 | 41.8 | 36.4 | 60.8 | 32.8 | 49.4 | 57.7 |
| 38RQU | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 42RXT | 14.2 | 95.4 | 8.8 | 15.8 | 96.3 | 7.1 | 13.6 | 93.4 | 12.2 | 28.2 | 87.0 | 22.0 | 41.9 | 83.7 | 25.4 |
| 42RXU | 6.6 | 99.6 | 0.9 | 2.6 | 99.5 | 0.9 | 2.6 | 100.0 | 0.1 | 12.0 | 85.4 | 25.0 | 6.7 | 96.3 | 7.2 |
| 34JHT | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 49SFC | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 56HLJ | 10.5 | 21.3 | 83.7 | 12.2 | 22.1 | 82.6 | 5.2 | 90.5 | 17.3 | 39.1 | 73.9 | 36.5 | 64.3 | 38.6 | 45.2 |
| 16SBF | 34.8 | 90.2 | 17.1 | 28.5 | 86.5 | 22.8 | 79.6 | 95.6 | 7.3 | 39.5 | 74.0 | 36.4 | 93.7 | 55.2 | 11.0 |
| 36LVQ | 6.2 | 14.6 | 89.4 | 6.1 | 16.0 | 88.6 | 6.9 | 23.5 | 84.0 | 8.0 | 61.0 | 54.7 | 6.7 | 71.8 | 43.4 |
| 36PUQ | 0.2 | 2.9 | 98.4 | 0.3 | 2.9 | 98.4 | 1.1 | 3.5 | 97.7 | 3.4 | 15.0 | 90.4 | 8.1 | 6.5 | 92.7 |
| 44TPP | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 37UGQ | 2.2 | 69.3 | 46.7 | 2.3 | 70.1 | 45.7 | 1.8 | 75.4 | 39.4 | 27.9 | 98.6 | 2.7 | 24.8 | 92.7 | 13.4 |
| 33LYE | 1.5 | 13.9 | 91.9 | 1.7 | 14.5 | 91.4 | 2.4 | 21.0 | 87.3 | 13.9 | 51.6 | 62.0 | 15.9 | 55.9 | 57.9 |
| 33LWK | 3.3 | 1.5 | 97.6 | 3.4 | 1.7 | 97.4 | 4.6 | 3.7 | 95.8 | 8.7 | 3.6 | 93.8 | 7.3 | 23.8 | 83.7 |
| 35LNF | 2.2 | 50.7 | 65.5 | 2.3 | 52.5 | 64.0 | 3.7 | 54.6 | 61.7 | 20.2 | 38.4 | 69.6 | 19.6 | 53.7 | 58.8 |
| 30NYP | 23.8 | 12.0 | 81.7 | 23.3 | 13.9 | 81.1 | 22.9 | 27.4 | 74.7 | 38.9 | 53.5 | 52.8 | 20.2 | 92.6 | 13.6 |
| 35LKH | 2.3 | 15.3 | 90.8 | 2.8 | 16.2 | 90.0 | 6.6 | 22.3 | 84.8 | 18.8 | 37.2 | 70.9 | 16.0 | 53.4 | 59.9 |
| 34MCV | 12.1 | 30.7 | 77.5 | 12.3 | 40.9 | 70.6 | 31.3 | 68.9 | 42.8 | 54.3 | 93.8 | 10.9 | 38.2 | 96.6 | 6.4 |
| 31PCN | 0.5 | 29.6 | 82.5 | 0.6 | 29.6 | 82.4 | 0.9 | 32.0 | 80.7 | 12.5 | 1.1 | 92.9 | 10.8 | 5.2 | 91.9 |
| 37LDD | 6.8 | 37.0 | 75.2 | 7.4 | 39.6 | 73.1 | 14.4 | 60.5 | 54.0 | 25.9 | 70.4 | 42.3 | 27.3 | 68.4 | 44.0 |
| 36LWH | 5.8 | 11.3 | 91.4 | 6.2 | 11.8 | 90.9 | 10.3 | 20.3 | 84.4 | 22.5 | 44.6 | 64.6 | 16.7 | 71.6 | 42.4 |
| 37LDE | 2.8 | 17.8 | 89.1 | 2.8 | 18.5 | 88.6 | 4.8 | 33.3 | 78.4 | 12.5 | 39.7 | 71.4 | 12.3 | 33.9 | 75.4 |
| 35NPF | 11.8 | 35.0 | 74.8 | 12.4 | 36.1 | 73.9 | 22.2 | 31.8 | 72.7 | 46.2 | 56.5 | 48.1 | 32.5 | 88.3 | 20.0 |
| 36MVS | 1.8 | 15.7 | 90.7 | 1.9 | 16.5 | 90.2 | 2.2 | 27.2 | 83.5 | 9.5 | 20.8 | 84.5 | 8.7 | 33.0 | 77.3 |
| 55LBC | 5.6 | 11.7 | 91.2 | 5.6 | 11.7 | 91.2 | 5.9 | 18.7 | 87.2 | 15.3 | 7.0 | 88.6 | 10.3 | 24.6 | 81.9 |
| 35NPJ | 4.2 | 14.3 | 90.5 | 4.6 | 14.2 | 90.4 | 8.2 | 20.9 | 85.0 | 13.1 | 56.3 | 58.1 | 15.0 | 57.7 | 56.5 |
| 30PWQ | 3.8 | 6.1 | 95.0 | 4.2 | 6.0 | 94.9 | 5.7 | 6.9 | 93.7 | 23.1 | 32.0 | 72.2 | 17.6 | 35.0 | 72.7 |
| 34PHR | 10.4 | 27.3 | 80.2 | 11.6 | 23.2 | 82.2 | 24.2 | 22.8 | 76.5 | 46.8 | 72.9 | 35.9 | 41.1 | 91.5 | 14.9 |
| 33MXT | 4.6 | 42.7 | 71.6 | 4.4 | 45.8 | 69.2 | 8.1 | 64.6 | 51.1 | 40.2 | 87.8 | 20.2 | 60.7 | 89.5 | 16.6 |
| 52LHJ | 22.2 | 2.3 | 86.6 | 18.8 | 3.0 | 88.4 | 65.6 | 3.9 | 50.7 | 13.0 | 2.3 | 92.0 | 7.2 | 10.3 | 91.2 |
| 30PWR | 12.2 | 61.5 | 53.5 | 12.8 | 66.6 | 48.3 | 52.8 | 73.0 | 34.3 | 98.2 | 100.0 | 0.1 | 0.0 | 100.0 | 0.0 |
| 34KCD | 4.7 | 11.9 | 91.5 | 5.6 | 12.5 | 90.8 | 9.7 | 20.0 | 84.8 | 0.0 | 100.0 | 0.0 | 20.4 | 69.1 | 44.5 |
| 21KYR | 99.7 | 95.6 | 0.6 | 99.9 | 99.1 | 0.1 | 96.3 | 26.6 | 7.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 31PBQ | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 34KBC | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 34PCU | 4.9 | 32.0 | 79.3 | 6.0 | 34.5 | 77.2 | 8.5 | 41.4 | 71.4 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 37PDP | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 46QFL | 10.8 | 44.3 | 68.6 | 11.0 | 45.5 | 67.6 | 12.7 | 53.0 | 61.1 | 0.0 | 100.0 | 0.0 | 24.9 | 68.4 | 44.5 |
| 28PGT | 4.9 | 33.0 | 78.6 | 5.1 | 34.8 | 77.3 | 9.0 | 44.7 | 68.8 | 24.5 | 65.0 | 47.8 | 31.0 | 55.1 | 54.4 |
| 47QLC | 10.2 | 51.8 | 62.8 | 9.9 | 57.4 | 57.9 | 9.8 | 71.1 | 43.8 | 0.0 | 100.0 | 0.0 | 31.9 | 91.7 | 14.7 |
| 46QFG | 8.5 | 58.5 | 57.1 | 7.7 | 61.6 | 54.2 | 8.9 | 70.2 | 45.0 | 33.5 | 89.1 | 18.7 | 48.4 | 68.6 | 39.1 |
| 21MZP | 5.9 | 49.6 | 65.6 | 6.2 | 50.3 | 65.0 | 13.1 | 23.8 | 81.2 | 37.0 | 23.4 | 69.1 | 34.3 | 39.7 | 62.9 |
| 46QGF | 4.3 | 22.6 | 85.6 | 4.7 | 27.6 | 82.3 | 15.5 | 33.1 | 74.7 | 40.1 | 70.4 | 39.7 | 41.2 | 88.0 | 20.0 |
| 48PVU | 22.1 | 42.4 | 66.2 | 22.2 | 45.4 | 64.2 | 28.3 | 57.0 | 53.8 | 36.1 | 95.0 | 9.3 | 38.7 | 96.1 | 7.3 |
| 47QRA | 33.1 | 41.5 | 62.4 | 31.9 | 56.0 | 53.5 | 26.4 | 76.3 | 35.9 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 21LXH | 82.3 | 31.5 | 28.2 | 80.7 | 32.8 | 30.0 | 89.7 | 38.9 | 17.6 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 23LQF | 98.9 | 50.2 | 2.2 | 99.2 | 59.6 | 1.6 | 99.4 | 68.9 | 1.3 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 |
| 20LKN | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | 100.0 | 0.0 | 0.0 | - | - | - | - | - | - |
References
- GCOS. The Global Observing System For Climate: Implementation Needs GCOS-200 (GOOS-214). Available online: https://library.wmo.int/doc_num.php?explnum_id=3417 (accessed on 25 October 2021).
- Bowman, D.M.J.S.; Balch, J.K.; Artaxo, P.; Bond, W.J.; Carlson, J.M.; Cochrane, M.A.; D’Antonio, C.M.; DeFries, R.S.; Doyle, J.C.; Harrison, S.P.; et al. Fire in the Earth System. Science 2009, 324, 481–484. [Google Scholar] [CrossRef]
- Van Der Werf, G.R.; Randerson, J.T.; Giglio, L.; Van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; Van Marle, M.J.E.; Morton, D.C.; Collatz, G.J.; et al. Global fire emissions estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef] [Green Version]
- Roos, C.I.; Scott, A.C.; Belcher, C.M.; Chaloner, W.G.; Aylen, J.; Bird, R.B.; Coughlan, M.R.; Johnson, B.R.; Johnston, F.H.; McMorrow, J.; et al. Living on a flammable planet: Interdisciplinary, cross-scalar and varied cultural lessons, prospects and challenges. Philos. Trans. R. Soc. B Biol. Sci. 2016, 371, 20150469. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forkel, M.; Dorigo, W.; Lasslop, G.; Teubner, I.; Chuvieco, E.; Thonicke, K. A data-driven approach to identify controls on global fire activity from satellite and climate observations (SOFIA V1). Geosci. Model Dev. 2017, 10, 4443–4476. [Google Scholar] [CrossRef] [Green Version]
- Tansey, K.; Grégoire, J.; Stroppiana, D.; Sousa, A.; Silva, J.; Pereira, J.M.C.; Boschetti, L.; Maggi, M.; Brivio, P.A.; Fraser, R.; et al. Vegetation burning in the year 2000: Global burned area estimates from SPOT VEGETATION data. J. Geophys. Res. 2004, 109, D14S03. [Google Scholar] [CrossRef] [Green Version]
- Simon, M.; Plummer, S.; Fierens, F.; Hoelzemann, J.J.; Arino, O. Burnt area detection at global scale using ATSR-2: The GLOBSCAR products and their qualification. J. Geophys. Res. 2004, 109, D14S02. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.; Defourny, P.; Leigh, R.; Pekel, J.; Van Bogaert, E.; Bartholomé, E. A new, global, multi-annual (2000–2007) burnt area product at 1 km resolution. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Tansey, K.; Bradley, A.; Smets, B.; van Best, C.; Lacaze, R. The Geoland2 BioPar burned area product. In Proceedings of the EGU General Assembly Conference Abstracts, Viena, Austria, 22–27 April 2012; p. 4727. [Google Scholar]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Chuvieco, E.; Yue, C.; Heil, A.; Mouillot, F.; Alonso-Canas, I.; Padilla, M.; Pereira, J.M.; Oom, D.; Tansey, K. A new global burned area product for climate assessment of fire impacts. Glob. Ecol. Biogeogr. 2016, 25, 619–629. [Google Scholar] [CrossRef] [Green Version]
- Chuvieco, E.; Lizundia-Loiola, J.; Lucrecia Pettinari, M.; Ramo, R.; Padilla, M.; Tansey, K.; Mouillot, F.; Laurent, P.; Storm, T.; Heil, A.; et al. Generation and analysis of a new global burned area product based on MODIS 250 m reflectance bands and thermal anomalies. Earth Syst. Sci. Data 2018, 10, 2015–2031. [Google Scholar] [CrossRef] [Green Version]
- Lizundia-Loiola, J.; Otón, G.; Ramo, R.; Chuvieco, E. A spatio-temporal active-fire clustering approach for global burned area mapping at 250 m from MODIS data. Remote Sens. Environ. 2020, 236, 111493. [Google Scholar] [CrossRef]
- Randerson, J.T.; Chen, Y.; van der Werf, G.R.; Rogers, B.M.; Morton, D.C. Global burned area and biomass burning emissions from small fires. J. Geophys. Res. Biogeosci. 2012, 117. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a Sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Ramo, R.; Roteta, E.; Bistinas, I.; van Wees, D.; Bastarrika, A.; Chuvieco, E.; van der Werf, G.R. African burned area and fire carbon emissions are strongly impacted by small fires undetected by coarse resolution satellite data. Proc. Natl. Acad. Sci. USA 2021, 118, e2011160118. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Ramo, R.; Corti, D.; Hantson, S.; Oliva, P.; Alonso-Canas, I.; Bradley, A.V.; Tansey, K.; Mota, B.; et al. Comparing the accuracies of remote sensing global burned area products using stratified random sampling and estimation. Remote Sens. Environ. 2015, 160, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Boschetti, L.; Roy, D.P.; Giglio, L.; Huang, H.; Zubkova, M.; Humber, M.L. Global validation of the collection 6 MODIS burned area product. Remote Sens. Environ. 2019, 235, 111490. [Google Scholar] [CrossRef] [PubMed]
- Long, T.; Zhang, Z.; He, G.; Jiao, W.; Tang, C.; Wu, B.; Zhang, X.; Wang, G.; Yin, R. 30m resolution Global Annual Burned Area Mapping based on Landsat images and Google Earth Engine. Remote Sens. 2019, 11, 489. [Google Scholar] [CrossRef] [Green Version]
- Updated 30 m Resolution Global Annual Burned Area Map—Remote Sensing of Global Change. Available online: https://vapd.gitlab.io/post/gabam/ (accessed on 11 February 2021).
- Wei, M.; Zhang, Z.; Long, T.; He, G.; Wang, G. Monitoring Landsat Based Burned Area as an Indicator of Sustainable Development Goals. Earth’s Future 2021, 9, e2020EF001960. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Vanderhoof, M.K.; Beal, Y.-J.; Takacs, J.D.; Schmidt, G.L.; Falgout, J.T.; Williams, B.; Fairaux, N.M.; Caldwell, M.K.; Picotte, J.J.; et al. Mapping burned areas using dense time-series of Landsat data. Remote Sens. Environ. 2017, 198, 504–522. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Vanderhoof, M.K.; Schmidt, G.L.; Beal, Y.J.; Picotte, J.J.; Takacs, J.D.; Falgout, J.T.; Dwyer, J.L. The Landsat Burned Area algorithm and products for the conterminous United States. Remote Sens. Environ. 2020, 244, 111801. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Collett, L.J. Development of an automated method for mapping fire history captured in Landsat TM and ETM+ time series across Queensland, Australia. Remote Sens. Environ. 2014, 148, 206–221. [Google Scholar] [CrossRef]
- Liu, J.; Heiskanen, J.; Maeda, E.E.; Pellikka, P.K.E. Burned area detection based on Landsat time series in savannas of southern Burkina Faso. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 210–220. [Google Scholar] [CrossRef] [Green Version]
- Filipponi, F. Exploitation of sentinel-2 time series to map burned areas at the national level: A case study on the 2017 Italy wildfires. Remote Sens. 2019, 11, 622. [Google Scholar] [CrossRef] [Green Version]
- Llorens, R.; Sobrino, J.A.; Fernández, C.; Fernández-Alonso, J.M.; Vega, J.A. A methodology to estimate forest fires burned areas and burn severity degrees using Sentinel-2 data. Application to the October 2017 fires in the Iberian Peninsula. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102243. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Belenguer-Plomer, M.A.; Tanase, M.A.; Chuvieco, E.; Bovolo, F. CNN-based burned area mapping using radar and optical data. Remote Sens. Environ. 2021, 260, 112468. [Google Scholar] [CrossRef]
- Stroppiana, D.; Azar, R.; Calò, F.; Pepe, A.; Imperatore, P.; Boschetti, M.; Silva, J.M.N.; Brivio, P.A.; Lanari, R. Integration of optical and SAR data for burned area mapping in Mediterranean regions. Remote Sens. 2015, 7, 1320–1345. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Diao, C.; Xian, G.; Yin, D.; Lu, Y.; Zou, S.; Erickson, T.A. A summary of the special issue on remote sensing of land change science with Google earth engine. Remote Sens. Environ. 2020, 248, 112002. [Google Scholar] [CrossRef]
- Daldegan, G.A.; Roberts, D.A.; Ribeiro, F.d.F. Spectral mixture analysis in Google Earth Engine to model and delineate fire scars over a large extent and a long time-series in a rainforest-savanna transition zone. Remote Sens. Environ. 2019, 232, 111340. [Google Scholar] [CrossRef]
- Roteta, E.; Oliva, P. Optimization of A Random Forest Classifier for Burned Area Detection in Chile Using Sentinel-2 Data. In Proceedings of the 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–26 March 2020. [Google Scholar]
- Seydi, S.T.; Akhoondzadeh, M.; Amani, M.; Mahdavi, S. Wildfire Damage Assessment over Australia Using Sentinel-2 Imagery and MODIS Land Cover Product within the Google Earth Engine Cloud Platform. Remote Sens. 2021, 13, 220. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Franquesa, M.; Chuvieco, E. Landsat and Sentinel-2 Based Burned Area Mapping Tools in Google Earth Engine. Remote Sens. 2021, 13, 816. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Ceccherini, G.; Achard, F.; Gond, V.; Gourlet-Fleury, S.; Cerutti, P. The Potential of Sentinel Satellites for Burnt Area Mapping and Monitoring in the Congo Basin Forests. Remote Sens. 2016, 8, 986. [Google Scholar] [CrossRef] [Green Version]
- Landsat Missions. Available online: https://www.usgs.gov/core-science-systems/nli/landsat (accessed on 24 January 2021).
- The Worldwide Reference System|Landsat Science. Available online: https://landsat.gsfc.nasa.gov/about/worldwide-reference-system (accessed on 13 July 2021).
- Arvidson, T.; Goward, S.; Gasch, J.; Williams, D. Landsat-7 long-term acquisition plan: Development and validation. Photogramm. Eng. Remote Sens. 2006, 72, 1137–1146. [Google Scholar] [CrossRef]
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef] [PubMed]
- ESA. Sentinel-2. Available online: http://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-2 (accessed on 24 January 2021).
- NGA. Geomatics—Coordinate Systems. Available online: https://earth-info.nga.mil/index.php?dir=coordsys&action=coordsys#tab_mgrs (accessed on 26 March 2021).
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A calibration and products validation status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Boschetti, L.; Justice, C.O.; Ju, J. The collection 5 MODIS burned area product—Global evaluation by comparison with the MODIS active fire product. Remote Sens. Environ. 2008, 112, 3690–3707. [Google Scholar] [CrossRef]
- MCD14DL|Earthdata. Available online: https://earthdata.nasa.gov/earth-observation-data/near-real-time/firms/c6-mcd14dl (accessed on 24 March 2021).
- Sulla-Menashe, D.; Friedl, M. MCD12Q1 MODIS/Terra+Aqua Land Cover Type Yearly L3 Global 500 m SIN Grid V006. 2019. Available online: https://ladsweb.modaps.eosdis.nasa.gov/missions-and-measurements/products/MCD12Q1 (accessed on 25 October 2021).
- Buchhorn, M.; Lesiv, M.; Tsendbazar, N.E.; Herold, M.; Bertels, L.; Smets, B. Copernicus global land cover layers-collection 2. Remote Sens. 2020, 12, 1044. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N. The Normalized Burn Ratio (NBR): A Landsat TM Radiometric Measure of Burn Severity; US Geological Survey, Northern Rocky Mountain Science Center: Bozeman, MT, USA, 1999.
- García, M.J.L.; Caselles, V. Mapping burns and natural reforestation using thematic Mapper data. Geocarto Int. 1991, 6, 31–37. [Google Scholar] [CrossRef]
- Trigg, S.; Flasse, S. An evaluation of different bi-spectral spaces for discriminating burned shrub-savannah. Int. J. Remote Sens. 2001, 22, 2641–2647. [Google Scholar] [CrossRef]
- Huang, H.; Roy, D.P.; Boschetti, L.; Zhang, H.K.; Yan, L.; Kumar, S.S.; Gomez-Dans, J.; Li, J. Separability analysis of Sentinel-2A Multi-Spectral Instrument (MSI) data for burned area discrimination. Remote Sens. 2016, 8, 873. [Google Scholar] [CrossRef] [Green Version]
- van Dijk, D.; Shoaie, S.; van Leeuwen, T.; Veraverbeke, S. Spectral signature analysis of false positive burned area detection from agricultural harvests using Sentinel-2 data. Int. J. Appl. Earth Obs. Geoinf. 2021, 97, 102296. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Boschetti, L.; Brivio, P.A. A method for extracting burned areas from Landsat TM/ETM+ images by soft aggregation of multiple Spectral Indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Koutsias, N.; Karteris, M. Burned area mapping using logistic regression modeling of a single post-fire Landsat-5 Thematic Mapper image. Int. J. Remote Sens. 2000, 21, 673–687. [Google Scholar] [CrossRef]
- Fraser, R.H.; Fernandes, R.; Latifovic, R. Multi-temporal burned area mapping using logistic regression analysis and change metrics. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1486–1488. [Google Scholar]
- Pu, R.; Gong, P. Determination of burnt scars using logistic regression and neural network techniques from a single post-fire Landsat 7 ETM+ image. Photogramm. Eng. Remote Sens. 2004, 70, 841–850. [Google Scholar] [CrossRef]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Mapping burned areas from Landsat TM/ETM+ data with a two-phase algorithm: Balancing omission and commission errors. Remote Sens. Environ. 2011, 115, 1003–1012. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Remer, L.A. Detection of Forests Using Mid-IR Reflectance: An Application for Aerosol Studies. IEEE Trans. Geosci. Remote Sens. 1994, 32, 672–683. [Google Scholar] [CrossRef]
- Chuvieco, E.; Ventura, G.; Martín, M.P.; Gómez, I. Assessment of multitemporal compositing techniques of MODIS and AVHRR images for burned land mapping. Remote Sens. Environ. 2005, 94, 450–462. [Google Scholar] [CrossRef]
- Lasaponara, R. Estimating spectral separability of satellite derived parameters for burned areas mapping in the Calabria region by using SPOT-Vegetation data. Ecol. Model. 2006, 196, 265–270. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Drake, N.A.; Wooster, M.J.; Hudak, A.T.; Holden, Z.A.; Gibbons, C.J. Production of Landsat ETM+ reference imagery of burned areas within Southern African savannahs: Comparison of methods and application to MODIS. Int. J. Remote Sens. 2007, 28, 2753–2775. [Google Scholar] [CrossRef]
- Sader, S.A.; Stone, T.A.; Joyce, A.T. Remote sensing of tropical forests: An overview of research and applications using non-photographic sensors. Photogramm. Eng. Remote Sens. 1990, 56, 1343–1351. [Google Scholar]
- Trigg, S.; Flasse, S. Characterizing the spectral-temporal response of burned savannah using in situ spectroradiometry and infrared thermometry. Int. J. Remote Sens. 2000, 21, 3161–3168. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanase, M.; Koutsias, N.; Garcia, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite Earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Achanta, R.; Süsstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CPVR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Yang, L.; Wang, L.; Abubakar, G.A.; Huang, J. High-resolution rice mapping based on snic segmentation and multi-source remote sensing images. Remote Sens. 2021, 13, 1148. [Google Scholar] [CrossRef]
- Justice, C.; Belward, A.; Morisette, J.; Lewis, P.; Privette, J.; Baret, F. Developments in the “validation” of satellite sensor products for the study of the land surface. Int. J. Remote Sens. 2000, 21, 3383–3390. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 MODIS-MCD45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Vanderhoof, M.K.; Fairaux, N.; Beal, Y.-J.G.J.G.; Hawbaker, T.J. Validation of the USGS Landsat Burned Area Essential Climate Variable (BAECV) across the conterminous United States. Remote Sens. Environ. 2017, 198, 393–406. [Google Scholar] [CrossRef]
- CEOS. Land Product Validation Subgroup. Available online: https://lpvs.gsfc.nasa.gov/index.html (accessed on 15 July 2021).
- Boschetti, L.; Stehman, S.V.; Roy, D.P. A stratified random sampling design in space and time for regional to global scale burned area product validation. Remote Sens. Environ. 2016, 186, 465–478. [Google Scholar] [CrossRef] [PubMed]
- Padilla, M.; Olofsson, P.; Stehman, S.V.; Tansey, K.; Chuvieco, E. Stratification and sample allocation for reference burned area data. Remote Sens. Environ. 2017, 203, 240–255. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O. International Global Burned Area Satellite Product Validation Protocol Part I-Production and Standardization of Validation Reference Data (to Be Followed by Part II-Accuracy Reporting); Committee on Earth Observation Satellites: Silver Spring, MD, USA, 2009.
- Franquesa, M.; Vanderhoof, M.K.; Stavrakoudis, D.; Gitas, I.Z.; Roteta, E.; Padilla, M.; Chuvieco, E. Development of a standard database of reference sites for validating global burned area products. Earth Syst. Sci. Data 2020, 12, 3229–3246. [Google Scholar] [CrossRef]
- Padilla, M.; Wheeler, J.; Tansey, K. ESA Climate Change Initiative-Fire_cci D4.1.1 Product Validation Report (PVR); Universidad de Alcala: Madrid, Spain, 2018. [Google Scholar]
- Olson, D.M.; Dinerstein, E.; Wikramanayake, E.D.; Burgess, N.D.; Powell, G.V.N.; Underwood, E.C.; D’amico, J.A.; Itoua, I.; Strand, H.E.; Morrison, J.C.; et al. Terrestrial Ecoregions of the World: A New Map of Life on Earth. Bioscience 2001, 51, 933. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375m active fire detection product for direct burned area mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practives; CRC Press: Boca Raton, FL, USA, 2008; ISBN 9780429143977. [Google Scholar]
- Stehman, S.V.; Foody, G.M. Key issues in rigorous accuracy assessment of land cover products. Remote Sens. Environ. 2019, 231, 111199. [Google Scholar] [CrossRef]
- Dice, L.R. Measures of the Amount of Ecologic Association Between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Fleiss, J.L. Statistical Methods for Rates and Proportions; Wiley: Hoboken, NJ, USA, 1981; ISBN 0471064289. [Google Scholar]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Giglio, L. Global assessment of the temporal reporting accuracy and precision of the MODIS burned area product. Int. J. Wildl. Fire 2010, 19, 705–709. [Google Scholar] [CrossRef]
- FIRMS. Fire Information for Resource Management System. Available online: https://developers.google.com/earth-engine/datasets/catalog/FIRMS#description (accessed on 21 June 2021).
- MCD14ML|Earthdata. Available online: https://earthdata.nasa.gov/earth-observation-data/near-real-time/firms/mcd14ml (accessed on 21 June 2021).
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An enhanced contextual fire detection algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Hantson, S.; Padilla, M.; Corti, D.; Chuvieco, E. Strengths and weaknesses of MODIS hotspots to characterize global fire occurrence. Remote Sens. Environ. 2013, 131, 152–159. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Cuevas-González, M.; Gerard, F.; Balzter, H.; Riaño, D. Analysing forest recovery after wildfire disturbance in boreal Siberia using remotely sensed vegetation indices. Glob. Chang. Biol. 2009, 15, 561–577. [Google Scholar] [CrossRef]
- Chu, T.; Guo, X.; Takeda, K. Remote sensing approach to detect post-fire vegetation regrowth in Siberian boreal larch forest. Ecol. Indic. 2016, 62, 32–46. [Google Scholar] [CrossRef]






| Band | Landsat-5 TM | Landsat-7 ETM+ | Landsat-8 OLI | Sentinel-2A&B MSI | Approximate Wavelength (μm) |
|---|---|---|---|---|---|
| Blue | B1 | B1 | B2 | B2 | 0.45–0.52 |
| Red | B3 | B3 | B4 | B4 | 0.64–0.68 |
| NIR | B4 | B4 | B5 | B8A (20m)/B8 (10m) | 0.80–0.89 |
| Short SWIR | B5 | B5 | B6 | B11 | 1.55–1.70 |
| Long SWIR | B7 | B7 | B7 | B12 | 2.10–2.30 |
| Quality band | pixel_qa | pixel_qa | pixel_qa | QA60 (L1C)/SCL (L2A) | - |
| Landsat-5 to 8 pixel_qa | S2 L1C QA60 | S2 L2A SCL |
|---|---|---|
| 3rd bit (cloud shadow) 5th bit (cloud) | 10th bit (cloud) 11th bit (cirrus) | 1 (saturated or defective) 3 (cloud shadows) 6 (water) 8 (medium prob. clouds) 9 (high prob. clouds) 10 (thin cirrus) 11 (snow) |
| Confidence Level (%) | Day of Burn | Meaning |
|---|---|---|
| 50–100 | 1–365 | Burned |
| 0 | 0 | Unburned |
| −1 | −1 | Unobserved |
| New Categories | Original LC Categories |
|---|---|
| Forests | Evergreen needleleaf forests Evergreen broadleaf forests Deciduous needleleaf forests Deciduous broadleaf forests Mixed forests |
| Shrublands | Closed shrublands Open shrublands |
| Savannas | Woody savannas Savannas |
| Grasslands | Grasslands |
| Wetlands | Permanent wetlands |
| Croplands | Croplands Cropland/Natural vegetation mosaics |
| Urban areas | Urban and built-up lands |
| Snow, ice, and water bodies | Permanent snow and ice Water bodies |
| Barren | Barren |
| Algorithm/Product | CE | OE | DC | BA (km2) |
|---|---|---|---|---|
| BAS2-10 | 9.0 | 26.8 | 81.1 | 4359 |
| BAS2-20 | 9.3 | 27.9 | 80.3 | 4309 |
| BAL-30 | 11.2 | 34.8 | 75.2 | 3979 |
| FireCCI51 | 19.1 | 50.0 | 61.8 | 3355 |
| MCD64A1 | 18.3 | 57.4 | 56.0 | 2824 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roteta, E.; Bastarrika, A.; Ibisate, A.; Chuvieco, E. A Preliminary Global Automatic Burned-Area Algorithm at Medium Resolution in Google Earth Engine. Remote Sens. 2021, 13, 4298. https://doi.org/10.3390/rs13214298
Roteta E, Bastarrika A, Ibisate A, Chuvieco E. A Preliminary Global Automatic Burned-Area Algorithm at Medium Resolution in Google Earth Engine. Remote Sensing. 2021; 13(21):4298. https://doi.org/10.3390/rs13214298
Chicago/Turabian StyleRoteta, Ekhi, Aitor Bastarrika, Askoa Ibisate, and Emilio Chuvieco. 2021. "A Preliminary Global Automatic Burned-Area Algorithm at Medium Resolution in Google Earth Engine" Remote Sensing 13, no. 21: 4298. https://doi.org/10.3390/rs13214298
APA StyleRoteta, E., Bastarrika, A., Ibisate, A., & Chuvieco, E. (2021). A Preliminary Global Automatic Burned-Area Algorithm at Medium Resolution in Google Earth Engine. Remote Sensing, 13(21), 4298. https://doi.org/10.3390/rs13214298