
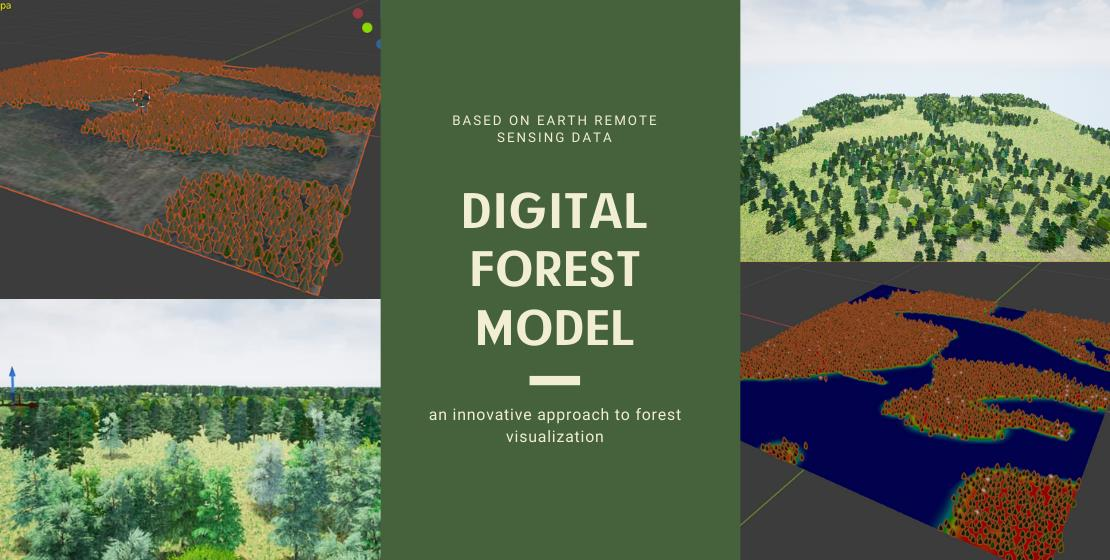
Visual Digital Forest Model Based on a Remote Sensing Data and Forest Inventory Data

Abstract
:
1. Introduction
- How to determine the number of trunks and species diversity of trees within a forest inventory unit with a complex structure—the fundamental goal of forest inventory is to determine the correct number of trunks and various tree species, since this impacts the plantation material and monetary worth.
- How the trees are exactly located in space—this can aid in the division of forests into territorial units (forest stands), as well as the development of forest roads and other linear (power transmission lines, railways, highways) and nonlinear (forest park (recreational) zones. It will also aid in the use of nontimber forest products, which are materially justified in comparison to timber products under Russian conditions.
- How the underlying surface or forest type can be displayed—the categorization of forestry helps us to identify which forest felling technique may be used in a particular forest stand and to indirectly determine the stand’s production and quality (quality and marketability class).
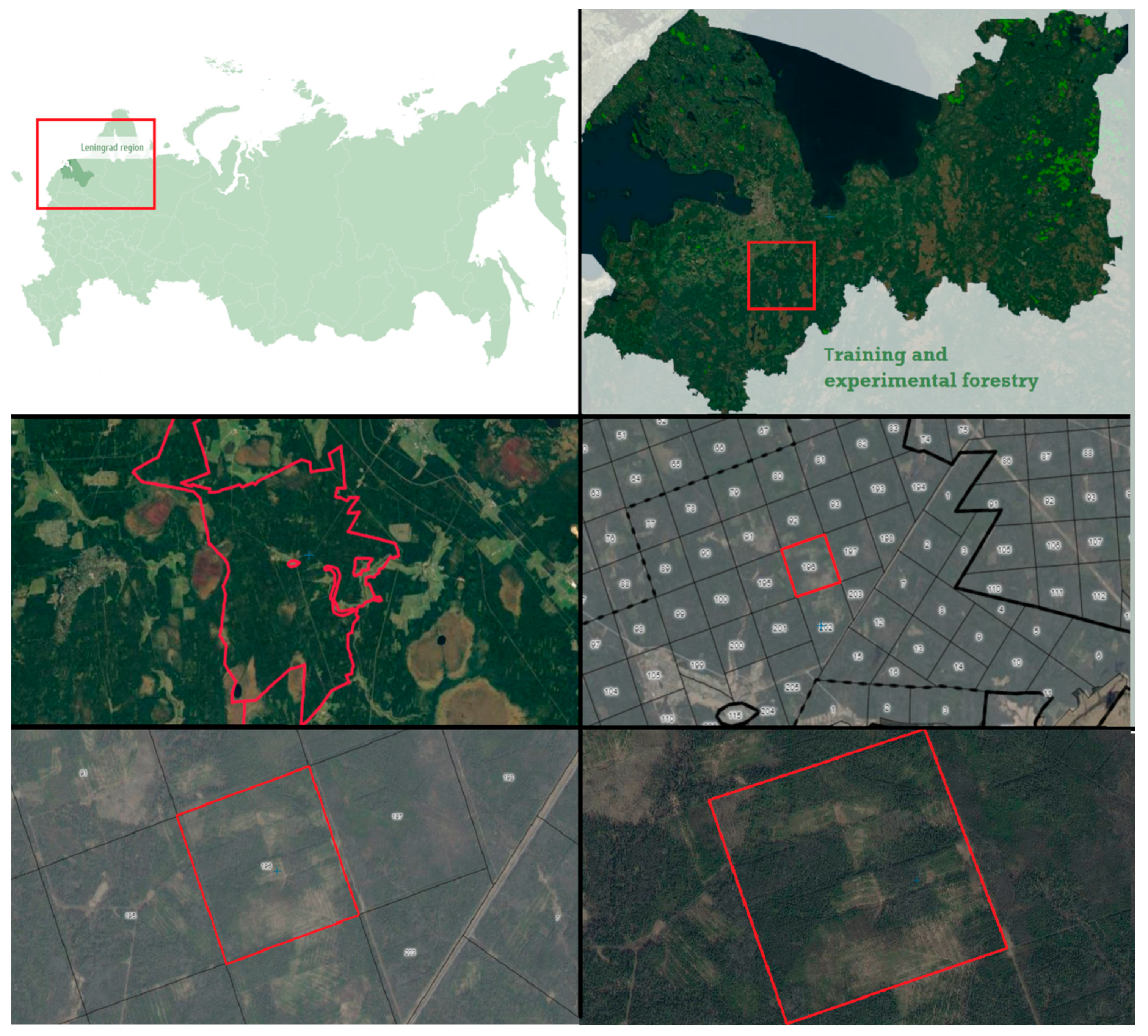
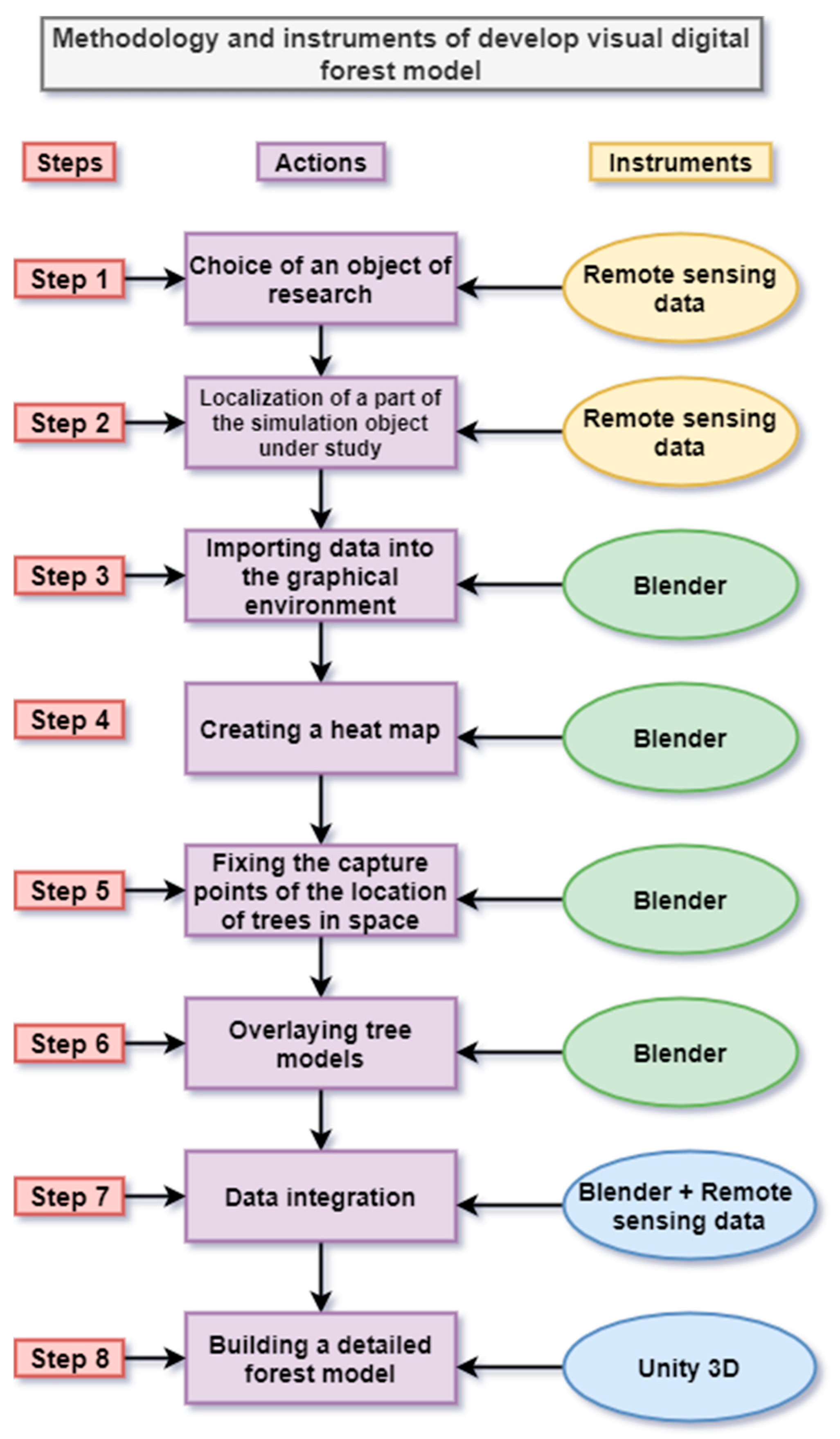
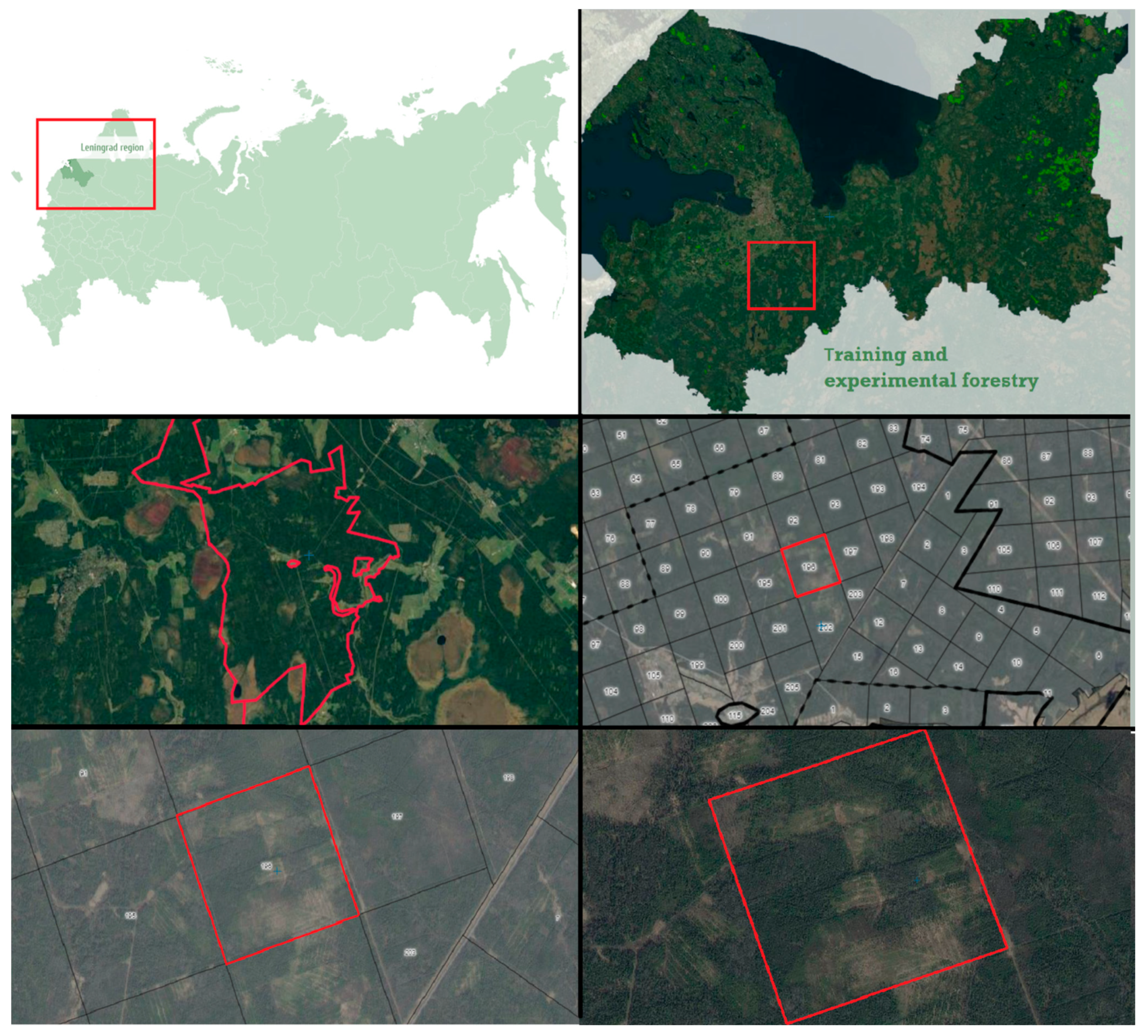
2. Study Area and Data
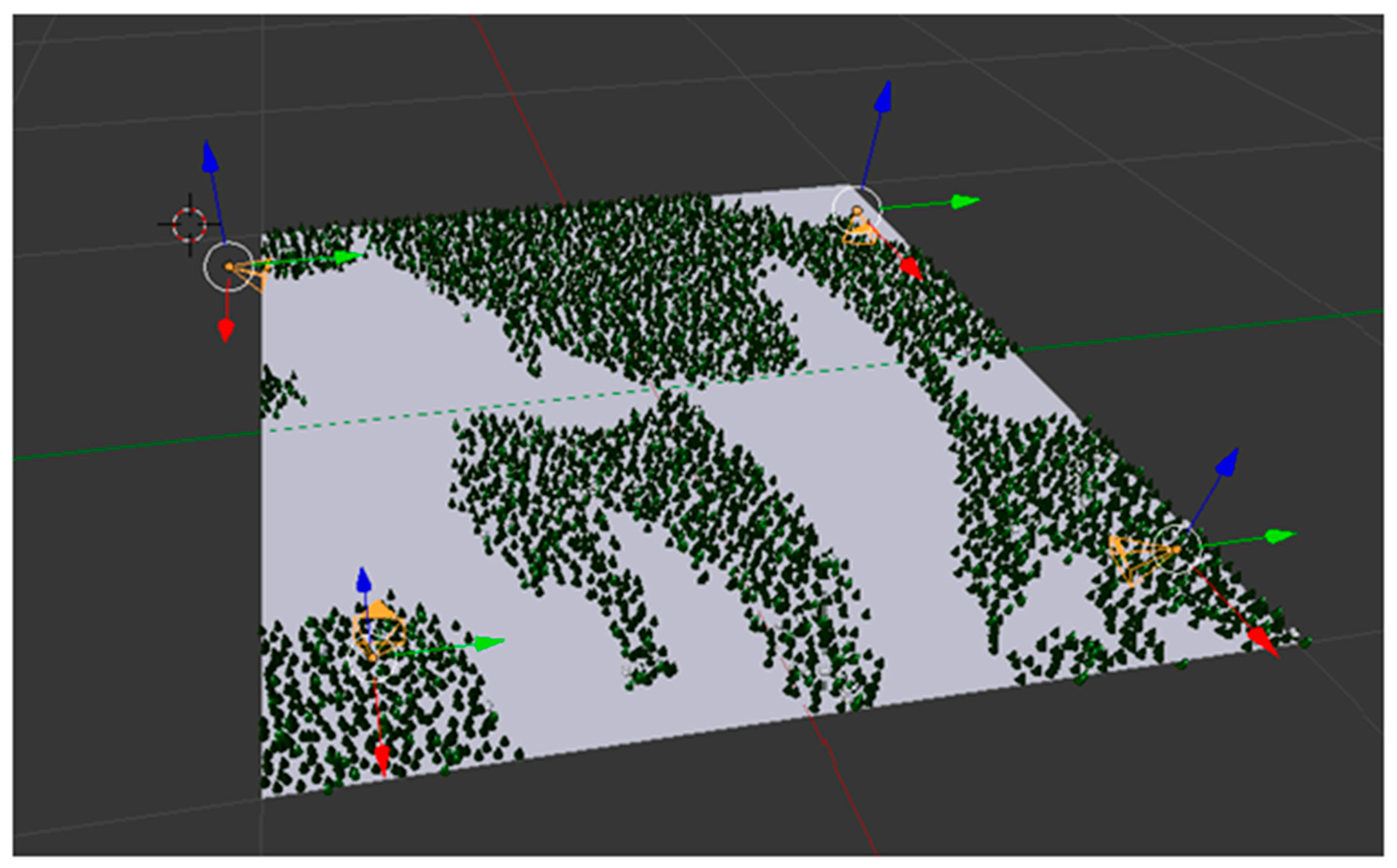
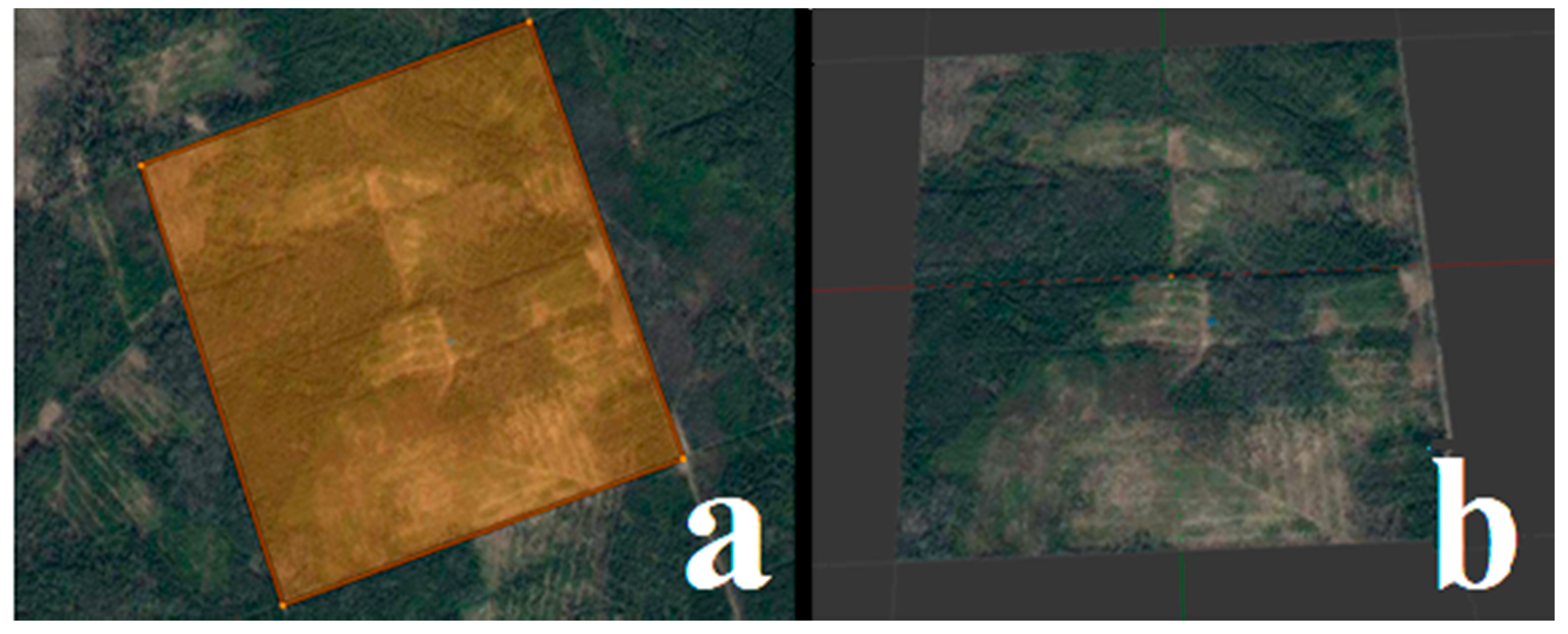
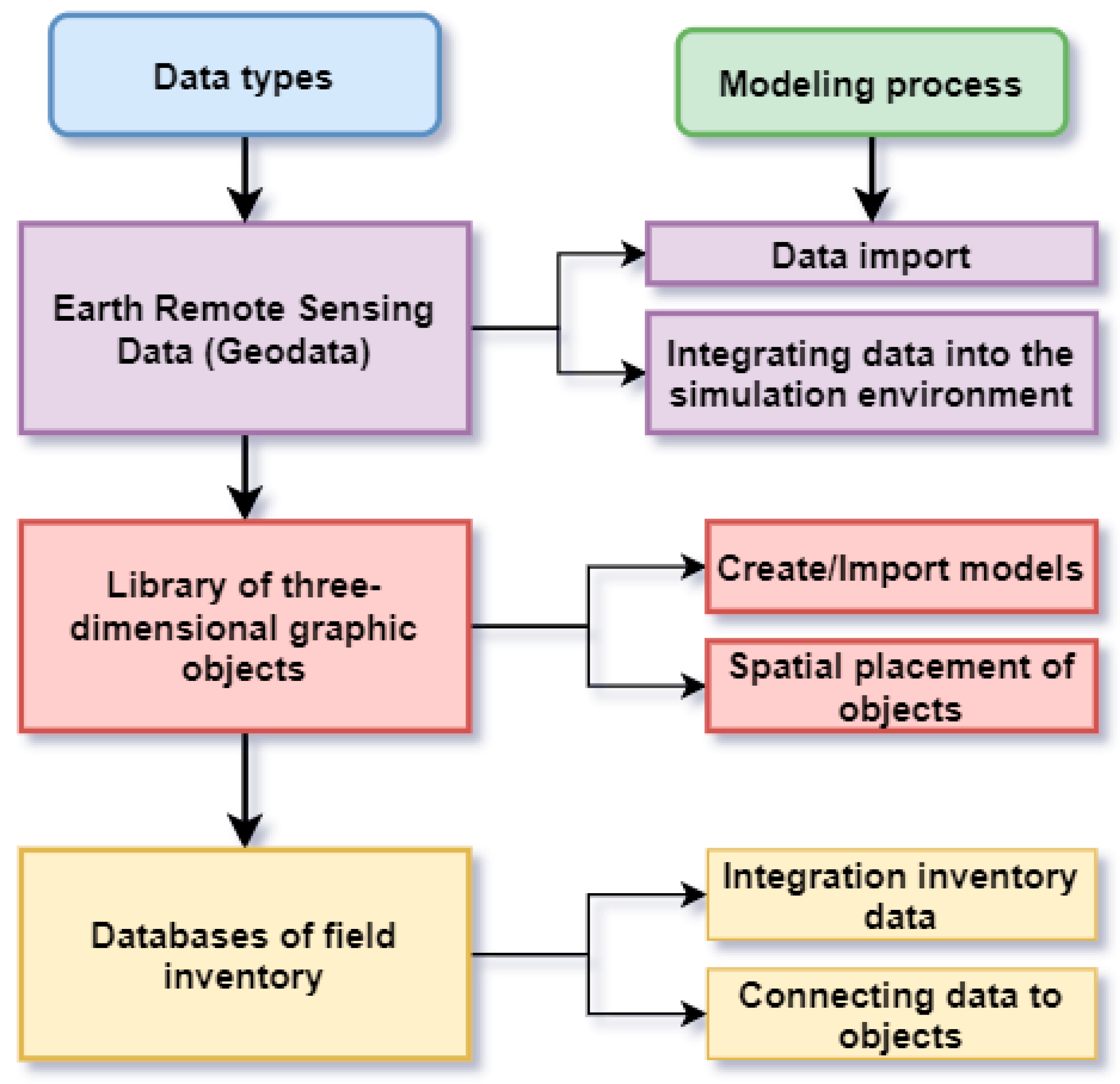
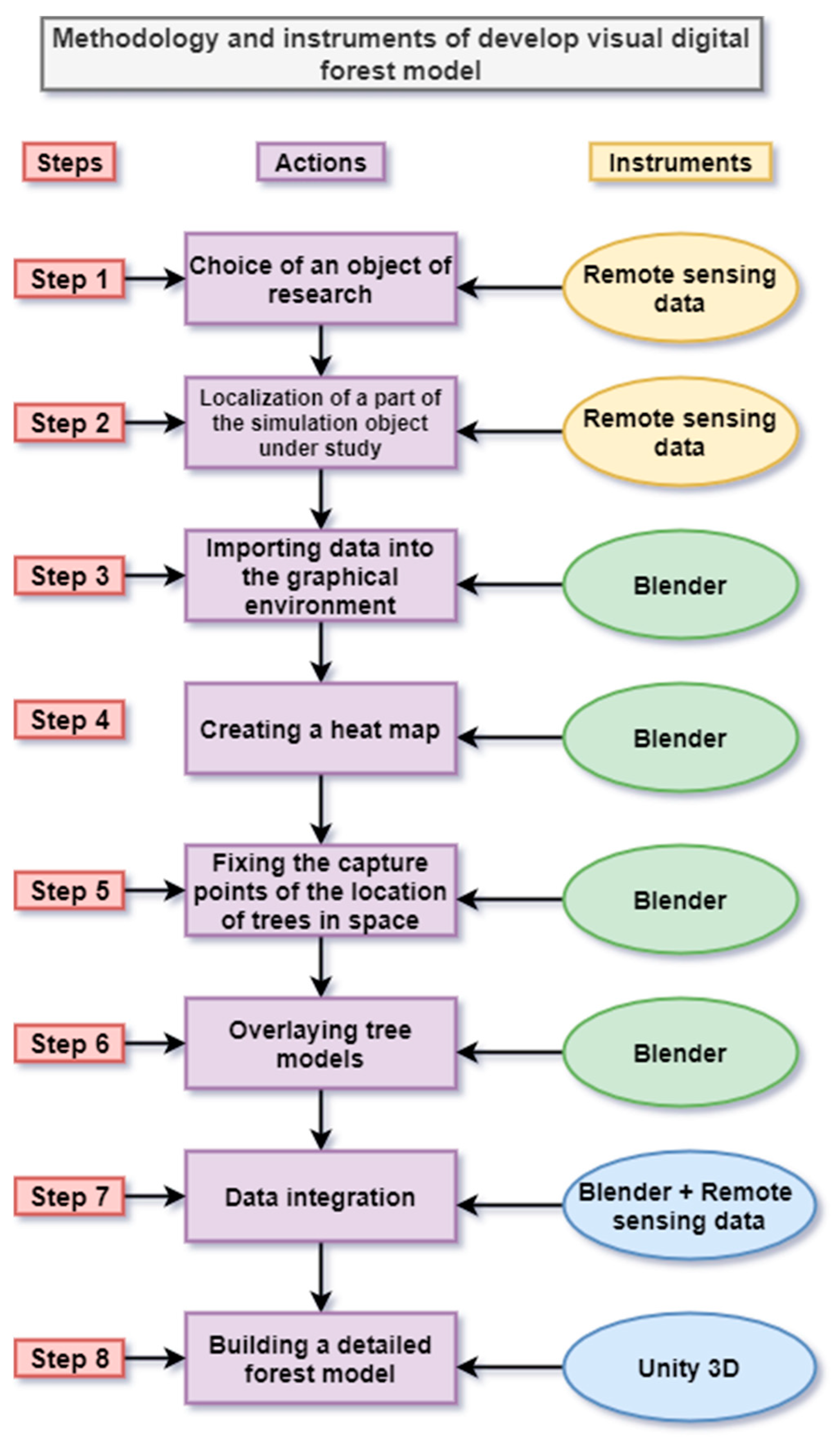
- Importing data into a graphics environment;
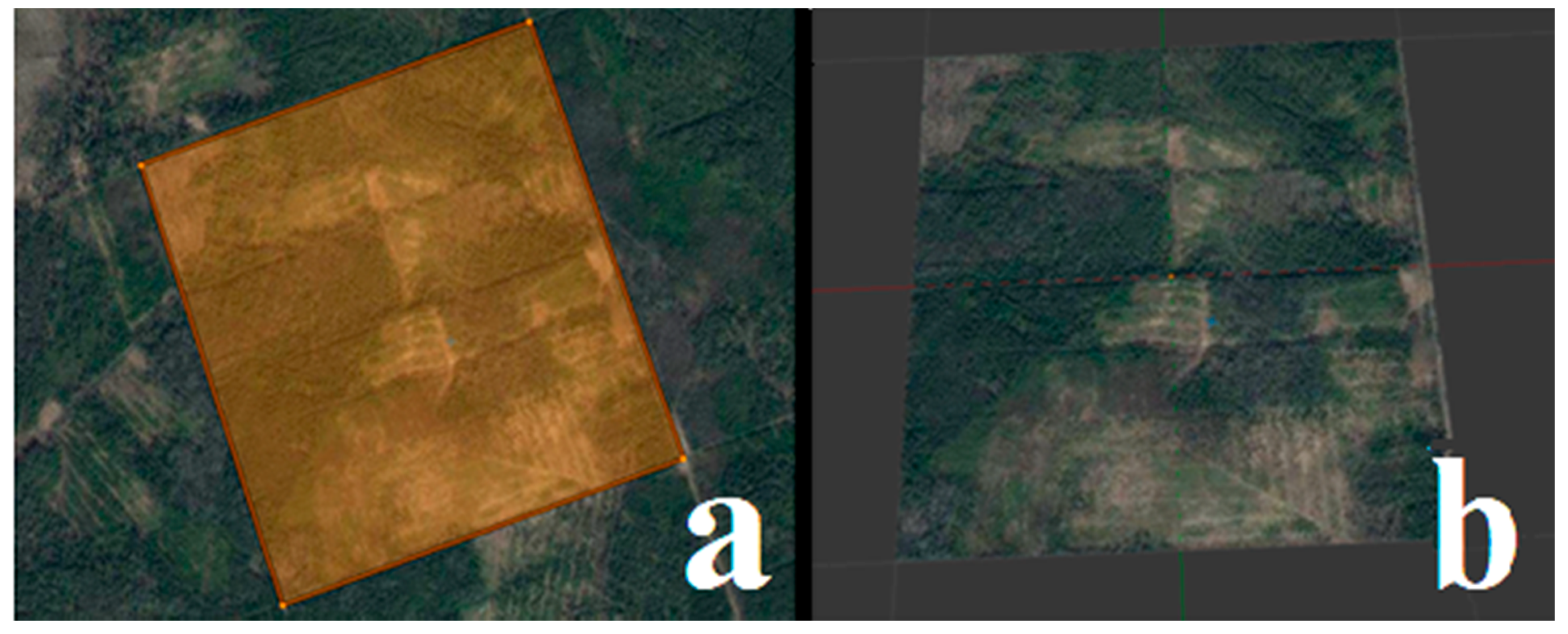
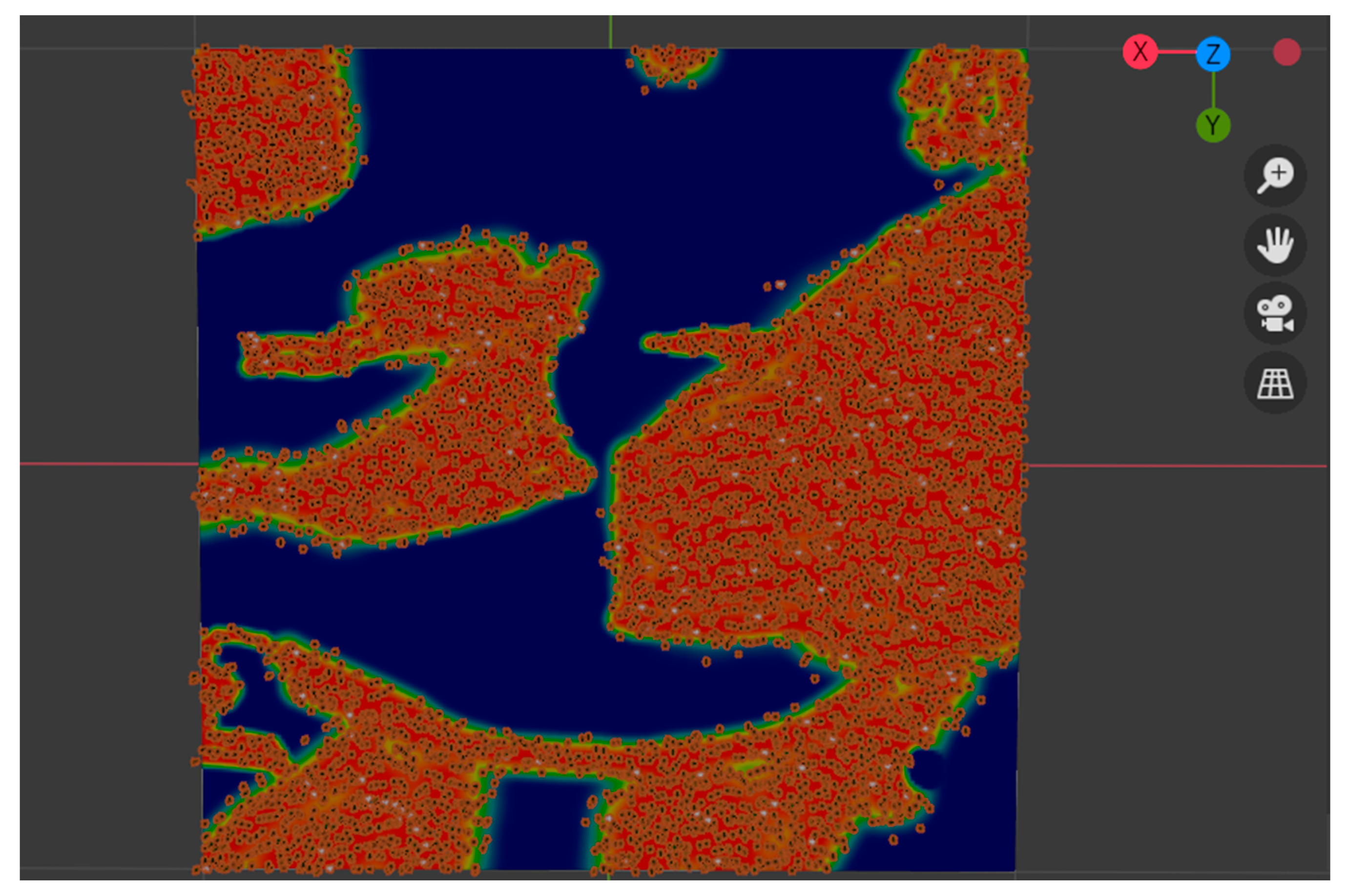
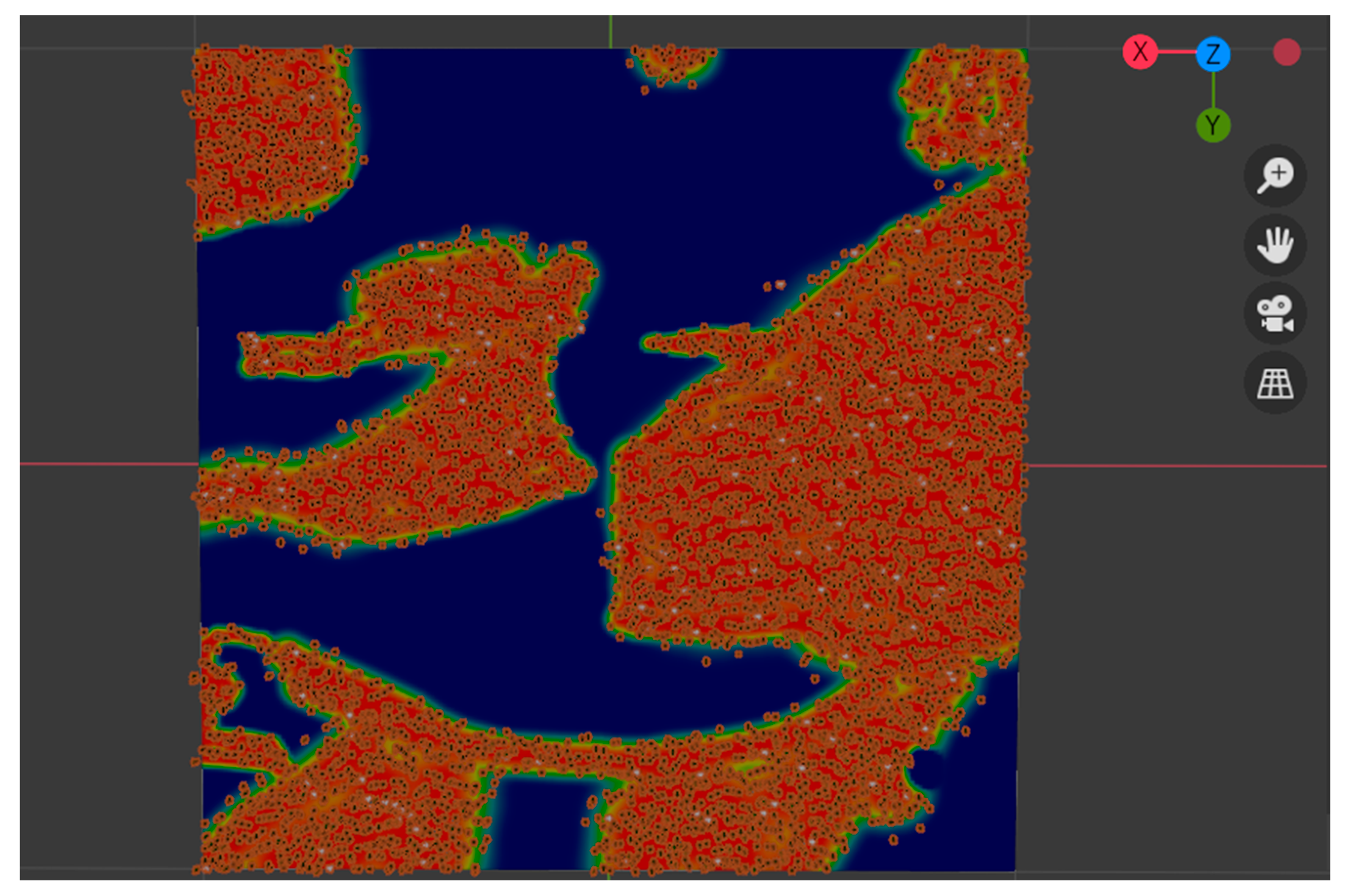
- Identifying the area covered by forest and creating a weight map;
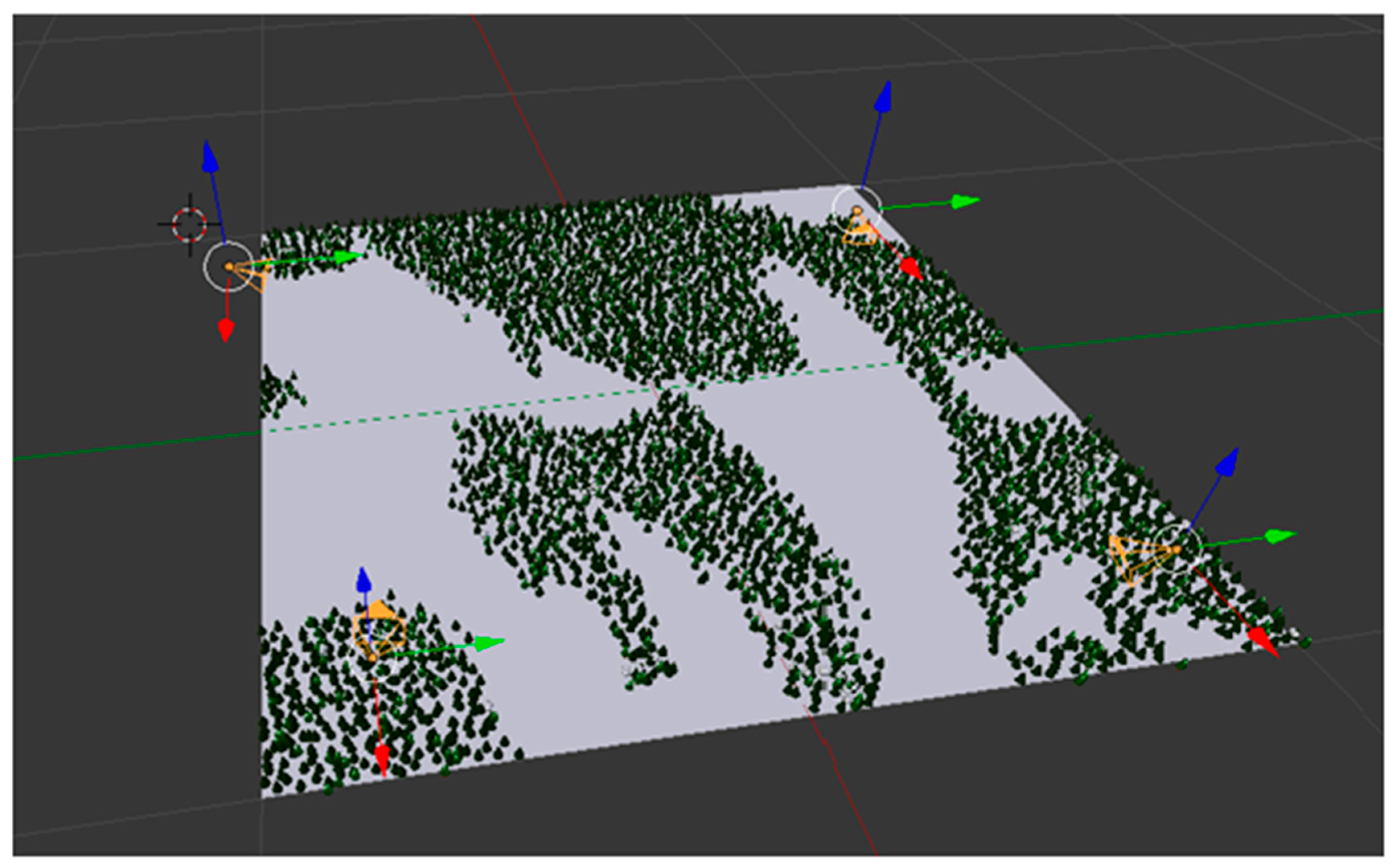
- Fixing the capture points of the location of trees in space;
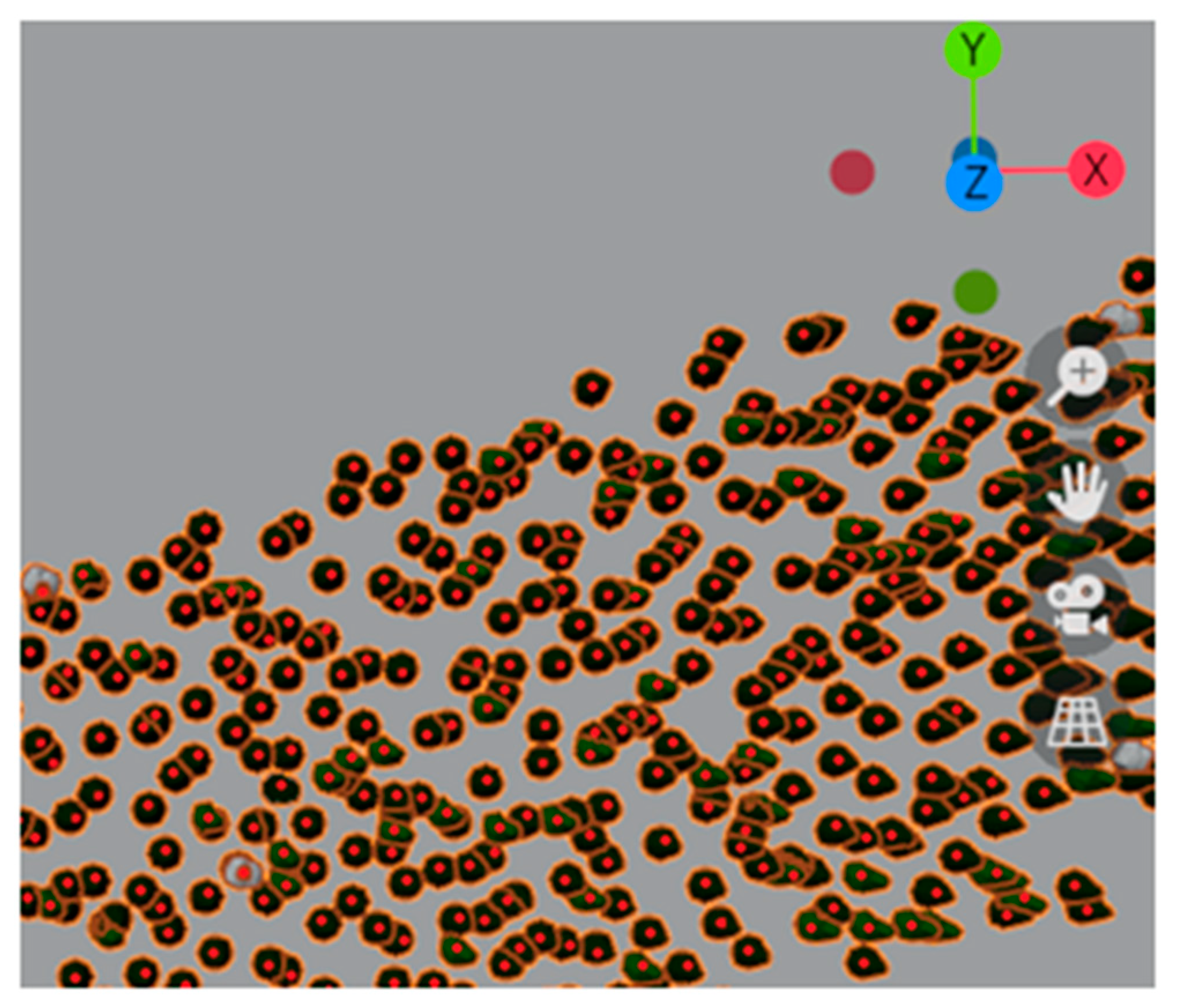
- Implementing and overlaying primary tree models;
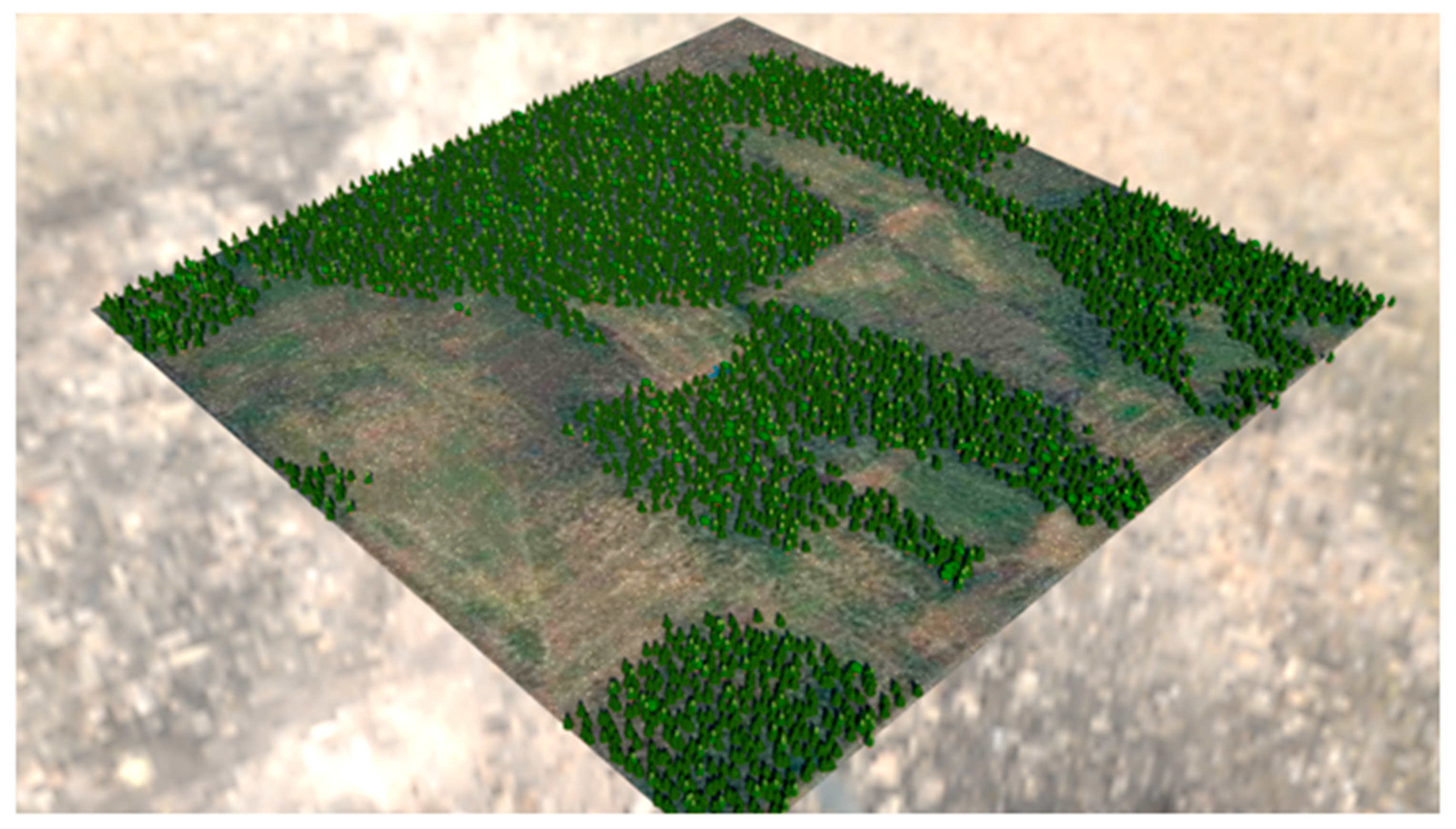
- Combining remote sensing data and three-dimensional objects;
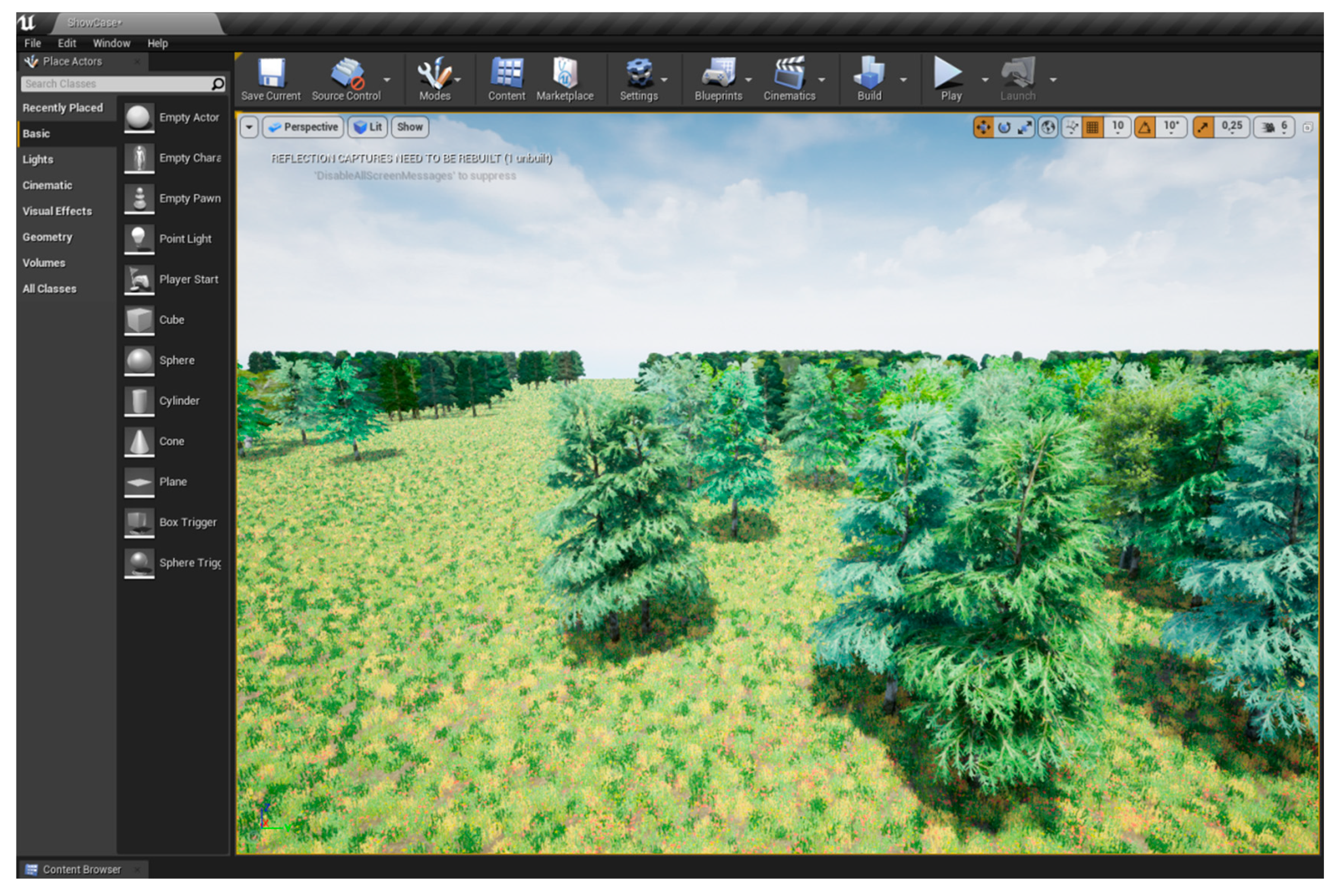
- Developing a detailed forest model based on the first created model.
3. Materials and Methods
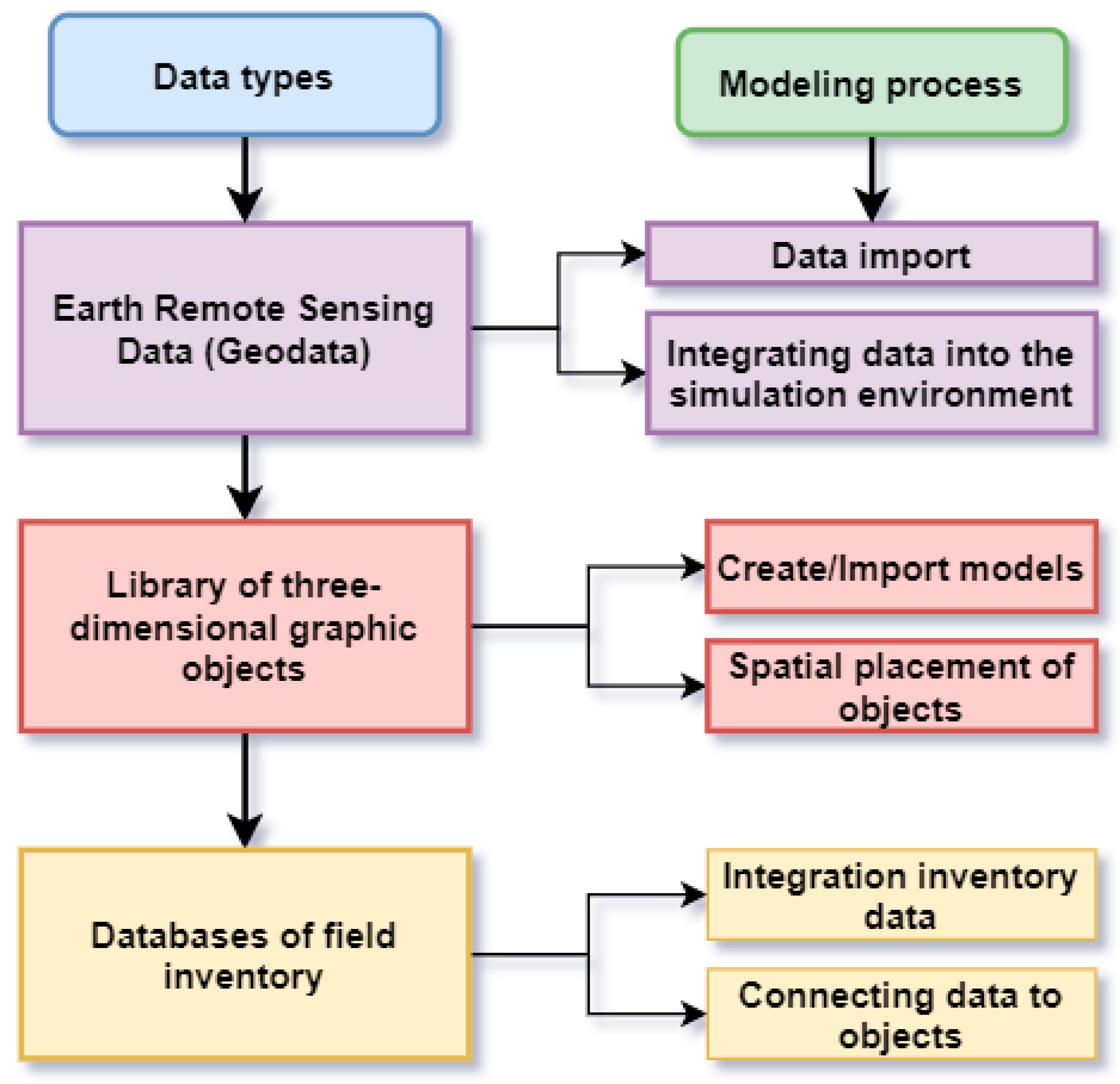
4. Data Integration
- (1)
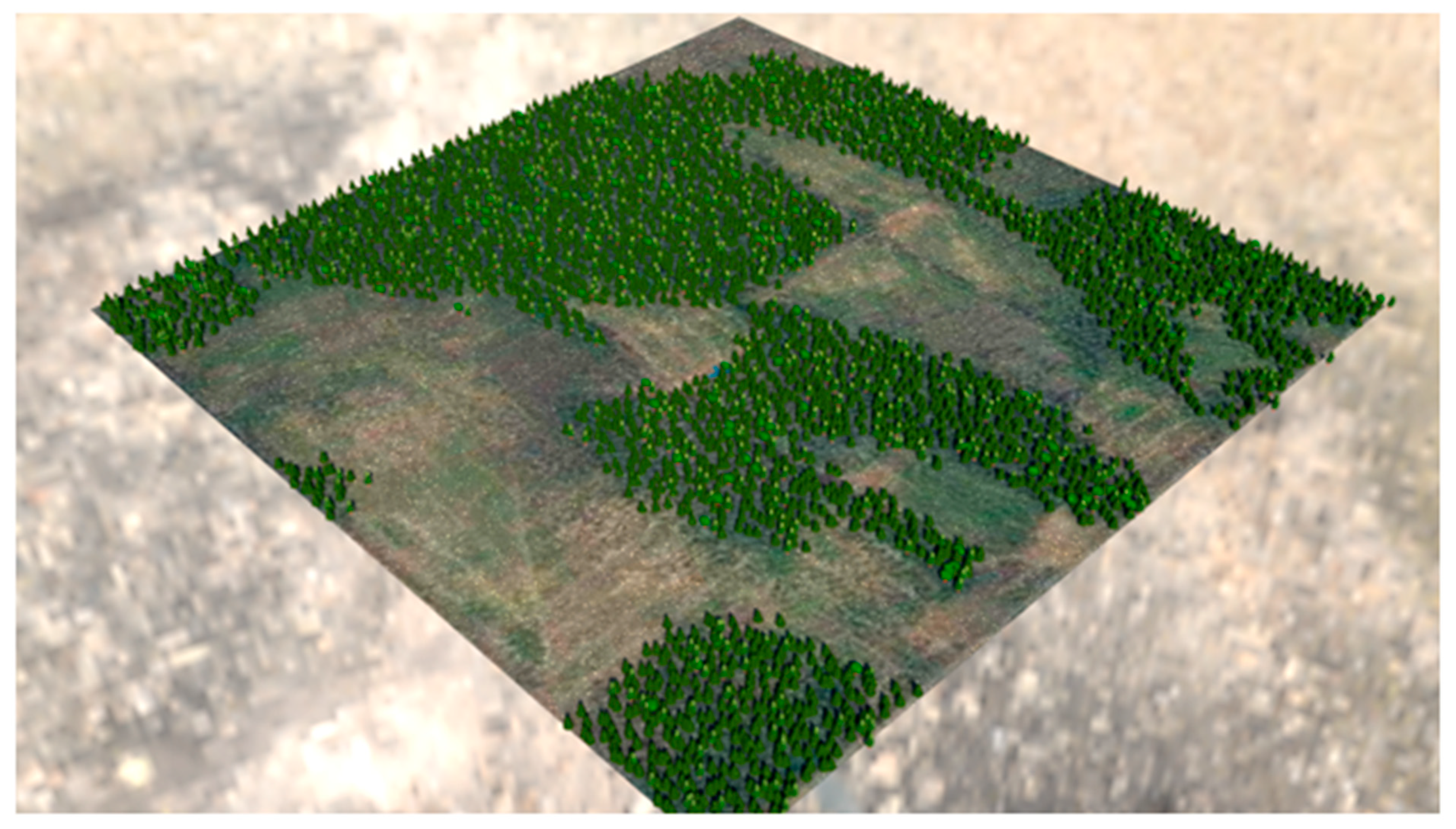
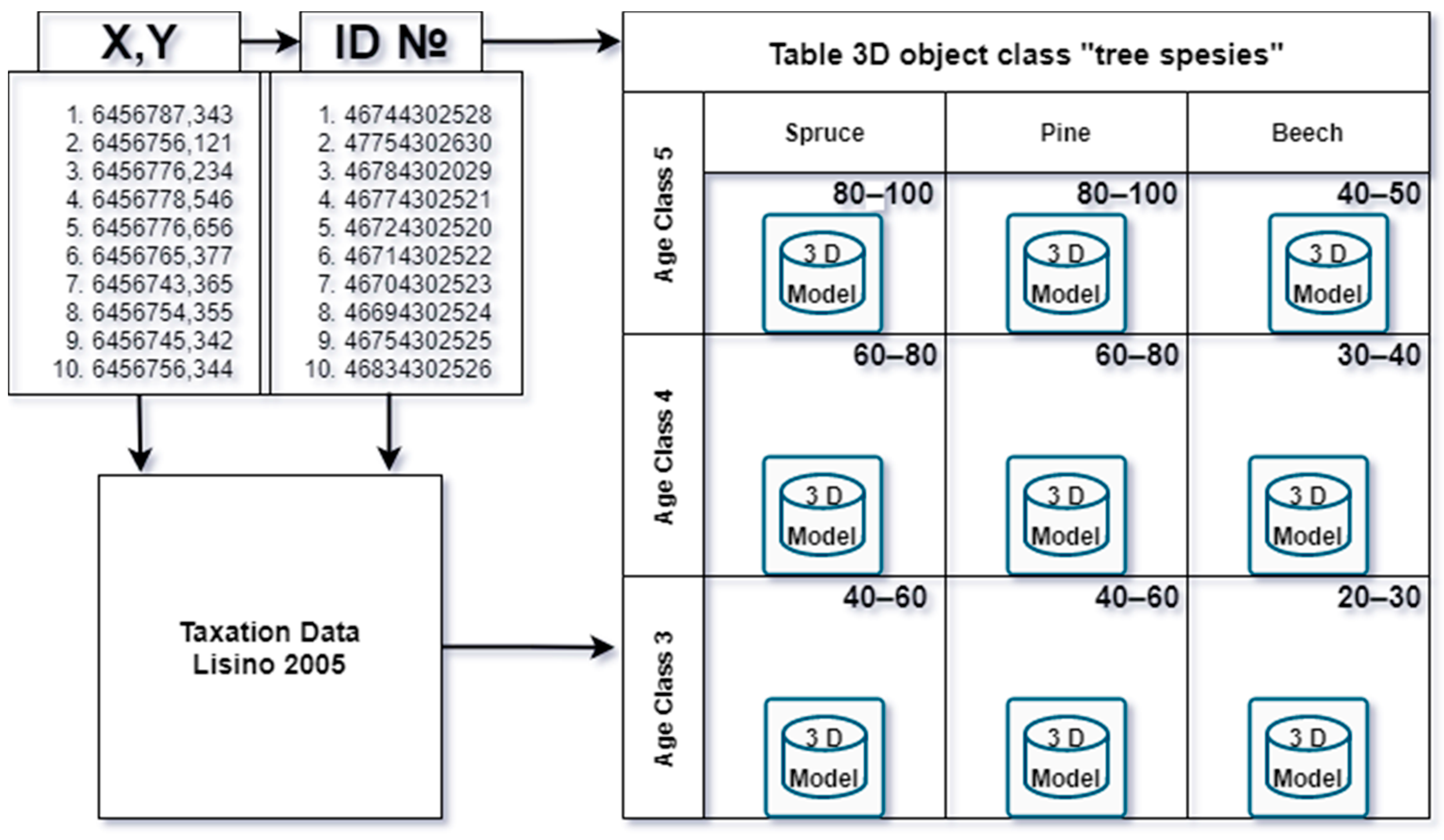
- The model displays the exact location of individual trees using satellite imaging.
- (2)
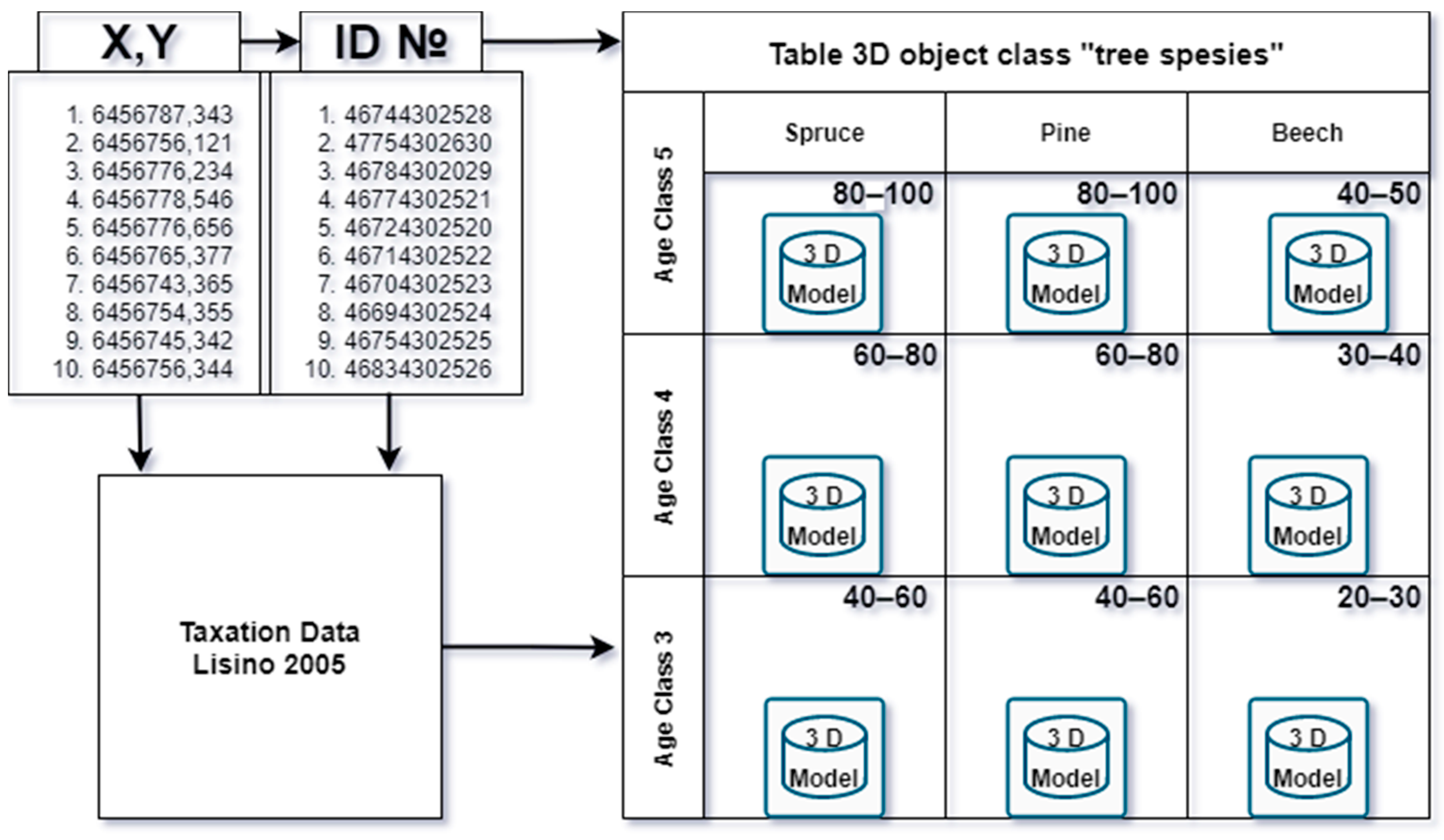
- An identification number (ID) and other forest indicators (for example, forest inventory data and growth track data) can be assigned manually to each tree on a satellite image and a 3D model because it was created based on a substrate from a satellite image reflecting the natural geographic features of the spatial distribution of forests using machine learning methods and, in particular, neural networks.
- (3)
- By having the forest inventory data and the coordinates of the location of individual trees, it is possible to display the course of plantation growth and even individual trees over time in a 3D model, which allows creating a three-dimensional model, then using forest growth models to observe how the forest develops, with the corresponding process being displayed using a 3D model of the site.
- (1)
- Lower cost of recording—in large countries such as the Russian Federation, it is challenging to continually update forest data using LiDAR recordings. Creating 3D models of forest stands from a substrate using satellite imagery is a faster method to model 3D maps.
- (2)
- The LiDAR is recorded from aircraft, whereas the method proposed in this article assumes only uses satellite images. This provides considerable flexibility when selecting study sites, especially when exploring substantial forest areas, where LiDAR recordings would require an extremely long time.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tang, S.; Tang, L.; Shao, G.; Dai, L. Digital forestry research in China. Sci. ChinaSer. E 2006, 49, 1–8. [Google Scholar] [CrossRef]
- Abramov, V.; Fokicheva, A.; Istomin, E.; Sokolov, A.; Goloskvskaya, E.; Levina, A. Machine learning with digital generators for training sets including proteins modelling in the context of big data and block chain technologies. In Proceedings of the 33 rd International Business Information Management Association Conference, IBIMA 2019: Education Excellence and InnovationManagement through Vision 2020, Granada, Spain, 10–11 April 2019; pp. 8638–8642. [Google Scholar]
- Malinin, V.; Averkiev, A.; Tsarev, V.; Istomin, E.; Petrov, Y. Use of statistical models to predict how different regions of the Arctic and the Northern Hemi sphere will reachanice-freeregime. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Smolensk, Russia, 25 January 2021; p. 042079. [Google Scholar] [CrossRef]
- Istomin, E.; Stepanov, S.; Petrov, Y.; Kolbina, O.; Sidorenko, A. Model of optimum integration of diverse geodata for the benefit of management of forestry. In Proceedings of the IOP Conference Series: Earth and Environmental Science: IV scientific-technical conference “Forests of Russia: Policy, Industry, Science and Education”, Saint Petersburg, Russia, 22–24 May 2019; Institute of Physics Publishing: Bristol, UK, 2019; p. 012013. [Google Scholar] [CrossRef]
- Strimbu, B.M.; Amarioarei, A.; Paun, M. Nonlinear parsimonious forest modelling as summing normal distribution of residuals. Eur. J. For. Res. 2021, 140, 659–674. [Google Scholar] [CrossRef]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A comparison of random forest variable select ion methods for classification prediction modelling. ExpertSyst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Shifley, S.R.; He, H.S.; Lischke, H.; Wang, W.J.; Jin, W.; Gustafson, E.J.; Thompson, J.R.; Thompson, F.R., III; Dijak, W.D.; Yang, J.; et al. The past and future of modelling forest dynamics: From growth and yield curvest o forest landscape models. Landsc. Ecol. 2017, 32, 1307–1325. [Google Scholar] [CrossRef]
- Gao, Y.; Lu, D.; Li, G.; Wang, G.; Chen, Q.; Liu, L.; Li, D. Comparative analysis of modelling algorithms for forest aboveground biomass estimation in a subtropical region. Remote Sens. 2018, 10, 627. [Google Scholar] [CrossRef] [Green Version]
- Knapp, N.; Fischer, R.; Huth, A. Linking lidar and forest modelling to assess biomass estimation a cross scales and disturbance states. Remote Sens. Environ. 2018, 205, 199–209. [Google Scholar] [CrossRef]
- Huang, J.; Lucash, M.S.; Scheller, R.M.; Klippel, A. Walking through the forest soft hefuture: Usingdata-driven virtual realityto visualize forest sunder climate change. Int. J. Geogr. Inf. Sci. 2021, 35, 1155–1178. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Yang, W. Forests growth monitoring based on treecanopy3D reconstruction using UA Vaerialphotogrammetry. Forests 2019, 10, 1052. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhang, W.; Hu, R.; Qi, J.; Shao, J.; Li, D.; Wang, P.; Qiao, C.; Shen, A.; Yan, G. Estimation of forest leaf area index using terrestrial laser scanning data and path length distribution model in open-canopy forests. Agric. For. Meteorol. 2018, 263, 323–333. [Google Scholar] [CrossRef]
- Kotlov, I.; Chernenkova, T. Modeling of Forest Communities’ Spatial Structure at the Regional Level through Remote Sensing and Field Sampling: Constraints and Solutions. Forests 2020, 11, 1088. [Google Scholar] [CrossRef]
- Favorskaya, M.N.; Zotin, A.G.; Danilin, I.M.; Smolentcheva, S.S. Realistic 3D-modeling of forest growth with natural effect. In Advances in Intelligent Decision Technologies; Springer: Berlin/Heidelberg, Germany, 2010; pp. 191–199. [Google Scholar]
- Ervin, S.M. Digital landscape modelling and visualization: A research agenda. Landsc. Urban Plan. 2001, 54, 49–62. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, T.; Wiegand, K.; He, F. Heterogeneity influences spatial patterns and demographics in forest stands. J. Ecol. 2008, 96, 807–820. [Google Scholar] [CrossRef]
- Aussenac, G. Interactions between forest stand sand microclimate: Ecophysiological aspect sand consequences for silviculture. Ann. For. Sci. 2000, 57, 287–301. [Google Scholar] [CrossRef]
- Assmann, E. The Principles of Foresty Yield Study: Studies in the Organic Production, Structure, Increment and Yield of Forest Stands; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Jactel, H.; Nicoll, B.C.; Branco, M.; Gonzalez-Olabarria, J.R.; Grodzki, W.; Långström, B.; Moreira, F.; Netherer, S.; Orazio, C.; Piou, D.; et al. The influences of forest stand management on biotic and abiotic risks of damage. Ann. For. Sci. 2009, 66, 701. [Google Scholar] [CrossRef]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arno, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree or chards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef] [Green Version]
- Tkacheva, A.A. Using remote sensing data in three-dimensional modelling of natural landscape scenes. Bull. Sib. State Aerosp. Univ. Named Acad. M.F. Reshetnev 2014, 5, 136–144. [Google Scholar]
- Favorskaya, M.; Zotin, A.; Chunina, A. Procedural modelling of broad–leaved tree sunder weather conditions in 3D virtual reality. Smart Innov. Syst. Technol. 2011, 11, 51–59. [Google Scholar] [CrossRef]
- Adeline, K.R.; Briottet, X.; Lefebvre, S.; Rivière, N.; Gastellu-Etchegorry, J.P.; Vinatier, F. Impact of tree crown transmittance on surface reflectance retrieval in the shade for high spatial resolution imaging spectroscopy: A simulation analysis based on tree modelling scenarios. Remote Sens. 2021, 13, 931. [Google Scholar] [CrossRef]
- Vagizov, M.R.; Ustyugov, V.A.; Kvochkin, D.O. Determination of the forest inventory indicators according to the photograph soft he unmanned aerial vehicles. Ecol. Environ. Conserv. 2017, 23, 582–586. [Google Scholar]
- Vagizov, M.; Potapov, A.; Navalikhin, S.; Bakeyeva, A.; Stepanov, S. Application of ensemble machine learning methods for modelling the heights of individual forest elements based on inventory data processing. In Proceedings of the IOP Conference Series: Earth and Environmental Science, II All-Russian scientific-technical conference “Digital Technologies inForest Sector”, Saint-Petersburg, Russia, 18–19 March 2021; Volume 806, p. 012035. [Google Scholar] [CrossRef]
- Vagizov, M.R.; Dobrovolskyi, A.A.; Istomin, E.P.; Zhernova, A.P.; Yagotintceva, N.V. Technological aspects of the development of the automated method of air-photo interpretation of forest stands. In Proceedings of the IOP Conference Series: Earth and Environmental Science: “Forests of Russia: Policy, Industry, Science and Education”, Saint-Petersburg, Russia, 16–18 June 2020; p. 012023. [Google Scholar] [CrossRef]
- Chauhan, K.; Jani, S.; Thakkar, D.; Dave, R.; Bhatia, J.; Tanwar, S.; Obaidat, M.S. Automated Machine Learning: The New Wave of Machine Learning. In Proceedings of the 2nd International Conference on Innovative Mechanisms for Industry Applications, ICIMIA2020—Conference Proceedings, Bangalore, India, 5–7 March 2020; pp. 205–212. [Google Scholar] [CrossRef]
- Prudius, A.A.; Karpunin, A.A.; Vlasov, A.I. Analysis of machine learning methods to improve efficiency of big data process in gin Industry 4.0. In Proceedings of the Journal of Physics: Conference Series: International Conference “Information Technologies in Business and Industry”—2—Mathematical Simulation and Computer Data Analysis, Novosibirsk, Russia, 13–15 February 2019; Institute of Physics Publishing: Bristol, UK, 2019; p. 032065. [Google Scholar] [CrossRef]
- Marconi, S.; Graves, S.J.; Gong, D.; Nia, M.S.; Le Bras, M.; Dorr, B.J.; Fontana, P.; Gearhart, J.; Greenberg, C.; Harris, D.J.; et al. A data science challenge for converting airborne remote sensing data into ecological information. PeerJ 2019, 6, e5843. [Google Scholar] [CrossRef] [Green Version]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Ren, W.; Sloderbeck, M.; Steurer, M.; Dinavahi, V.; Noda, T.; Filizadeh, S.; Chevrefils, A.R.; Matar, M.; Iravani, R.; Dufour, C.; et al. Inter facing issues in real-time digital simulators. IEEE Trans. Power Deliv. 2010, 26, 1221–1230. [Google Scholar] [CrossRef]
- Mairaj, A.; Baba, A.I.; Javaid, A.Y. Application specific drone simulators: Recent advance sand challenges. Simul. Model. Pract. Theory 2019, 94, 100–117. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, B.B.; Alcarria, R.; Sánchez-Picot, Á.; Sánchez-de-Rivera, D. A methodology for the design of application-specific cyber-physical social sensing co-simulators. Sensors 2017, 17, 2177. [Google Scholar] [CrossRef] [Green Version]
- Nitoslawski, S.A.; Wong-Stevens, K.; Steenberg, J.W.N.; Witherspoon, K.; Nesbitt, L.; Konijnendijkvanden-Bosch, C.C. The Digital Forest: Mapping a Decade of Knowledge on Technological Applications for Forest Ecosystems. Earth’s Future 2021, 9, e2021EF002123. [Google Scholar] [CrossRef]
- Sheridan, R.P.; Wang, W.M.; Liaw, A.; Ma, J.; Gifford, E.M. Extreme gradient boosting as a method for quantitative structure–activity relationships. J. Chem. Inf. Modeling 2016, 56, 2353–2360. [Google Scholar] [CrossRef] [PubMed]
- Moisen, G.G.; Freeman, E.A.; Blackard, J.A.; Frescino, T.S.; Zimmermann, N.E.; Edwards, T.C., Jr. Predicting tree species presence and basal area in Utah: A comparison of stochastic gradient boosting, generalized additive models, and tree-based methods. Ecol. Model. 2006, 199, 176–187. [Google Scholar] [CrossRef]
- Guelman, L. Gradient boosting trees for auto insurance loss cost modelling and prediction. Expert Syst. Appl. 2012, 39, 3659–3667. [Google Scholar] [CrossRef]
- Sun, S.; Cao, Z.; Zhu, H.; Zhao, J. A survey of optimization methods from a machine learning perspective. IEEE Trans. Cybern. 2019, 50, 3668–3681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Lang, B. Machine learning and deep learning methods for intrusion detection systems: Asurvey. Appl. Sci. 2019, 9, 4396. [Google Scholar] [CrossRef] [Green Version]
- Wei, J.; Chu, X.; Sun, X.Y.; Xu, K.; Deng, H.X.; Chen, J.; Wei, Z.; Lei, M. Machine learning in materials science. InfoMat 2019, 1, 338–358. [Google Scholar] [CrossRef]
- Zhang, Y.; Rajapakse, J.C. Machine Learning in Bioinformatics; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 4. [Google Scholar]
- Belyakov, S.L.; Belyakova, L.; Glushkov, A.A. Meta-transformations of image sin these arch for reliable solutions in intelligent geoinformation systems. Inf. Technol. 2016, 22, 836–842. [Google Scholar]
- Medvedev, I.V.; Ptitsyna, L.K. Optimization of planners for intelligent geoinformation systems. In Actual Problems of Infotelecommunications in Science and Education: Collection of Scientific Articles; Bachevsky, S.V., Ed.; Saint Petersburg State University of Telecommunications Named after prof. Bonch-Bruevich, M.A.: Saint Petersburg, Russia, 2017; Volume 4, pp. 333–337. [Google Scholar]
- Belyakov, S.L.; Bozhenyuk, A.V.; Belyakova, M.L.; Zubkov, S.A. Case based reason in gin intelligent geographic information systems for the management of logistics projects. In Proceedings of the Fuzzy Technologies in the Industry—FTI 2018: II International Scientific and Practical Conference, Ulyanovsk, Russia, 23–25 October 2018; Ulyanovsk State Technical University: Ulyanovsk, Russia, 2018; pp. 1–10. [Google Scholar]
- Zhukova, N.A. Design patterns of object-oriented intelligent geoinformation systems. Izv. Spbgetu. Leti. 2014, 6, 20–26. [Google Scholar]
- Hernández, J.; Garcıa, L.; Ayuga, F. Integration methodologies for visual impact assessment of rural buildings by geographic information systems. Biosyst. Eng. 2004, 88, 255–263. [Google Scholar] [CrossRef]
- Langran, G. Time in Geographic Information Systems; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Indirabai, I.; Nair, M.H.; Nair, J.R.; Nidamanuri, R.R. Direct estimation of leaf area index of tropical forests using LiDAR point cloud. Remote Sens. Appl. Soc. Environ. 2020, 18, 100295. [Google Scholar] [CrossRef]
- Schneider, F.D.; Kükenbrink, D.; Schaepman, M.E.; Schimel, D.S.; Morsdorf, F. Quantifying 3Dstructure and occlusion in dense tropical and temperate forests using close-range LiDAR. Agric. For. Meteorol. 2019, 268, 249–257. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C. Update of forest inventory data with lidar and high spatial resolution satellite imagery. Can. J. Remote Sens. 2008, 34, 5–12. [Google Scholar] [CrossRef]
- Almeida, D.R.A.; Broadbent, E.N.; Zambrano, A.M.A.; Wilkinson, B.E.; Ferreira, M.E.; Chazdon, R.; Meli, P.; Gorgens, E.B.; Silva, C.A.; Stark, S.C.; et al. Monitoring the structure off or est restoration plantations with a drone-LiDAR system. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 192–198. [Google Scholar] [CrossRef]
- Smith, W.H. Air Pollution and Forests: Interactions between Air Contaminants and Forest Ecosystems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Janssens, I.A.; Lankreijer, H.; Matteucci, G.; Kowalski, A.S.; Buchmann, N.; Epron, D.; Pilegaard, W.; Kutsch, W.; Longdoz, B.; Grünwald, T.; et al. Productivity overshadows temperature in determining soil and ecosystem respiration across European forests. Glob. Chang. Biol. 2001, 7, 269–278. [Google Scholar] [CrossRef]
- Rooney, T.P. Deer impacts on forest ecosystems: A North American perspective. For. An. Int. J. For. Res. 2001, 74, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.-C.; Chang, C.-T. The Dynamic of Vegetation Growth with Regular Climate and Climatic Fluctuations in a Subtropical Mountainous Island, Taiwan. Remote Sens. 2021, 13, 3298. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meters | Resolution | Scale of Application | Accuracy Coefficient (Conv. Units) |
|---|---|---|---|
| 0.1–0.5 | Extremely high resolution | 1:500–1:5000 | 0.9 |
| 0.5–1.0 | Very high resolution | 1:5000–1:10,000 | 0.8 |
| 1–4 | High resolution | 1:10,000–1: 15,000 | 0.7 |
| 4–12 | Medium resolution | 1:15,000–1:25,000 | 0.6 |
| 12–50 | Moderate resolution | 1:25,000–1:10l,000 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
R., M.V.; P., E.I.; L., V.M.; P., A.P.; V., N.Y. Visual Digital Forest Model Based on a Remote Sensing Data and Forest Inventory Data. Remote Sens. 2021, 13, 4092. https://doi.org/10.3390/rs13204092
R. MV, P. EI, L. VM, P. AP, V. NY. Visual Digital Forest Model Based on a Remote Sensing Data and Forest Inventory Data. Remote Sensing. 2021; 13(20):4092. https://doi.org/10.3390/rs13204092
Chicago/Turabian StyleR., Marsel Vagizov, Eugenie Istomin P., Valerie Miheev L., Artem Potapov P., and Natalya Yagotinceva V. 2021. "Visual Digital Forest Model Based on a Remote Sensing Data and Forest Inventory Data" Remote Sensing 13, no. 20: 4092. https://doi.org/10.3390/rs13204092
APA StyleR., M. V., P., E. I., L., V. M., P., A. P., & V., N. Y. (2021). Visual Digital Forest Model Based on a Remote Sensing Data and Forest Inventory Data. Remote Sensing, 13(20), 4092. https://doi.org/10.3390/rs13204092