Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms



Abstract
1. Introduction
- (1)
- We present a new method to identify pine wood nematode disease with high accuracy using UAV images.
- (2)
- An SIRM is used to retain spatial information to obtain low-level features, and a CIM can expand the receptive field to obtain high-level features.
- (3)
- The method can also be used to identify trees with single pine wood nematode disease.
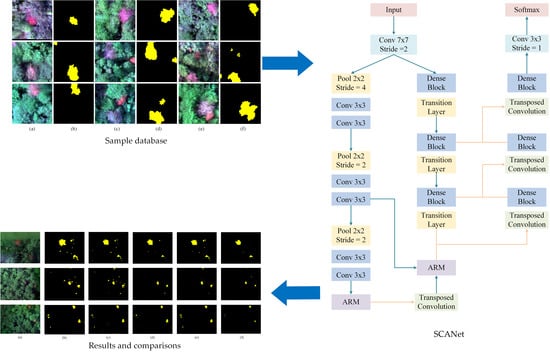
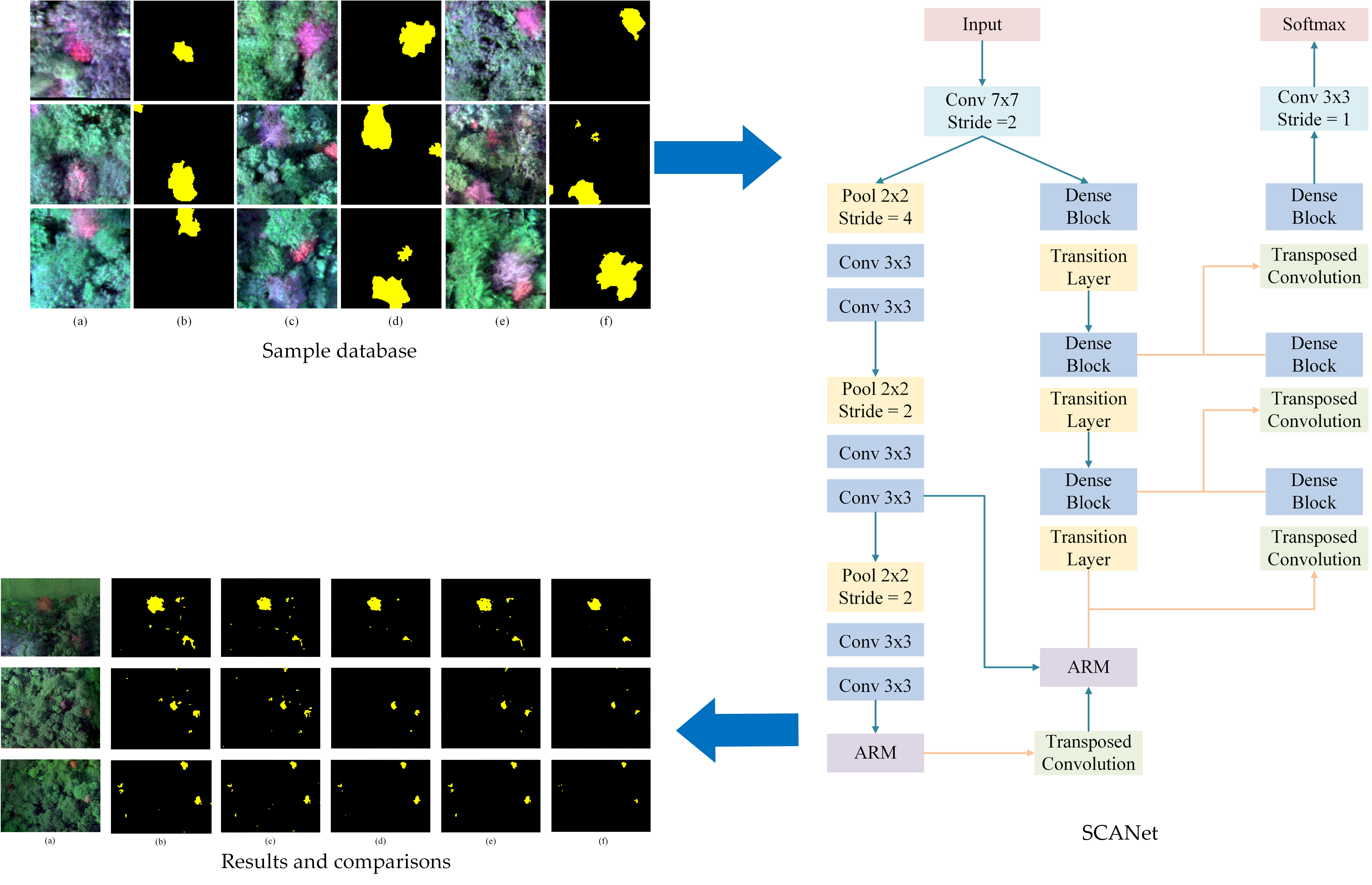
2. Methods
2.1. The Network Structure
2.2. Spatial Information Retention Module
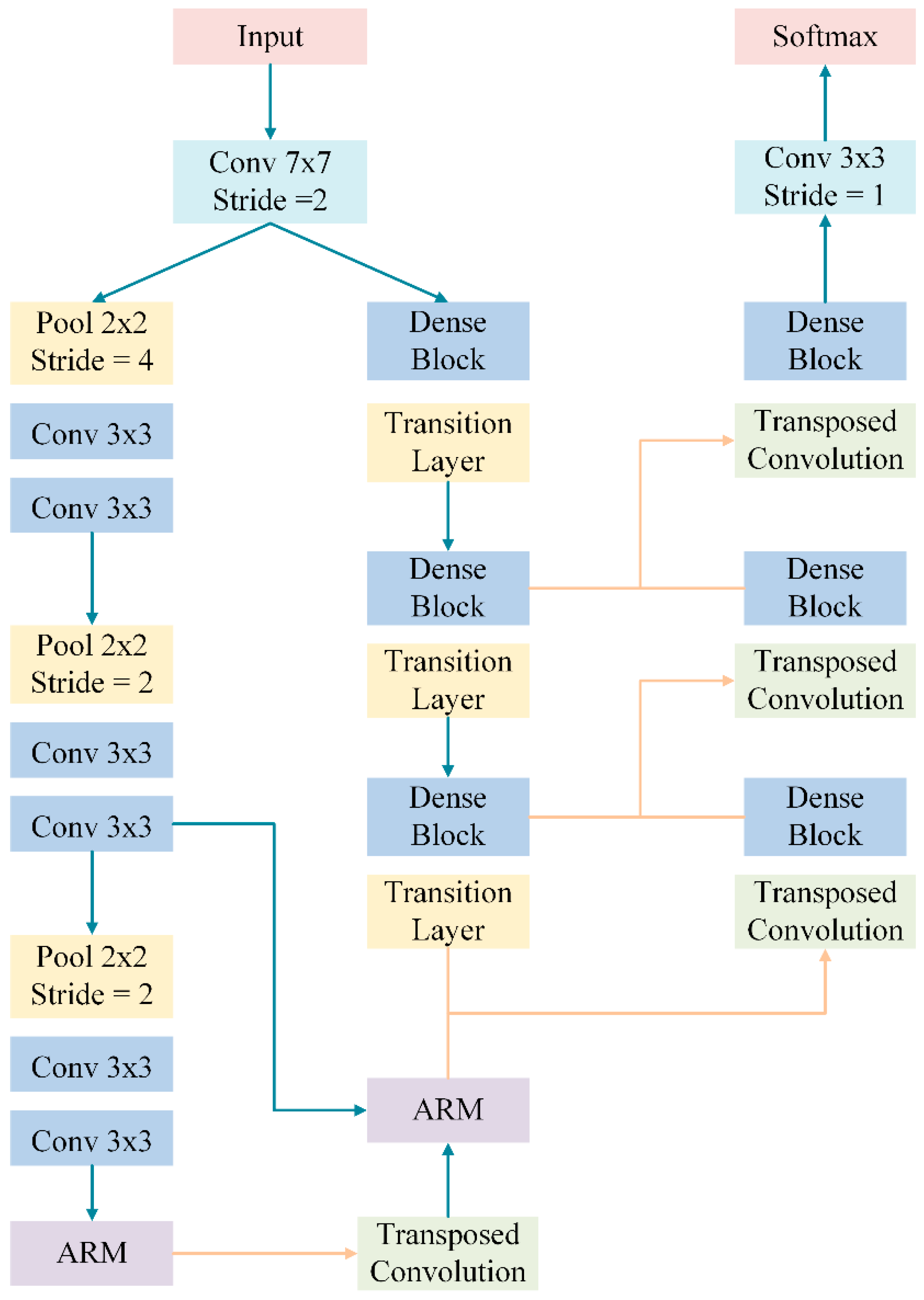
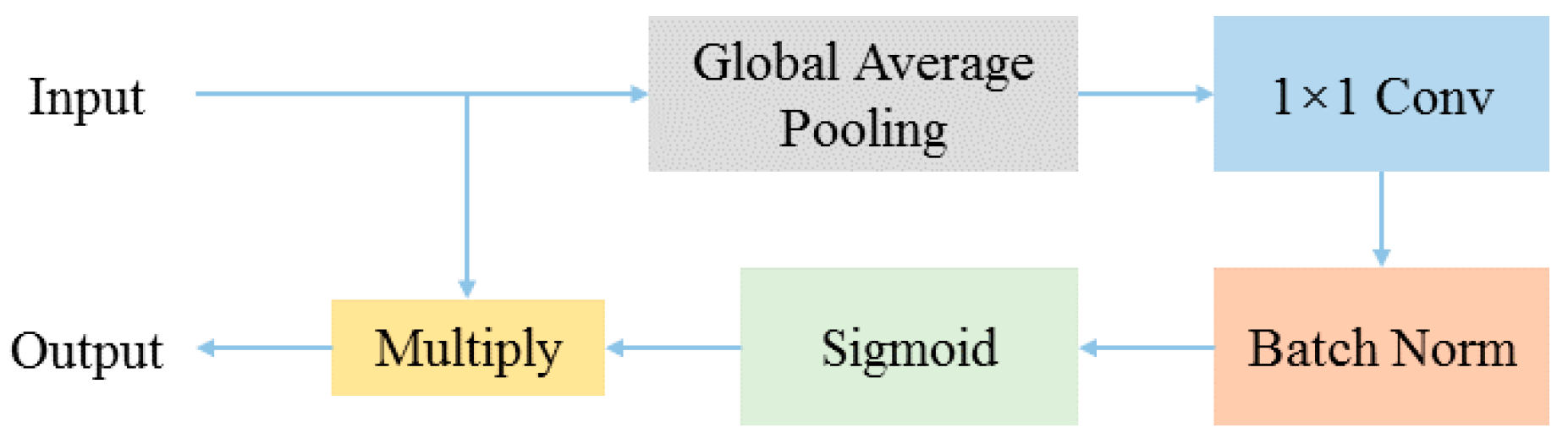
2.3. Context Information Module
2.4. Evaluation Index
3. Data and Experiments
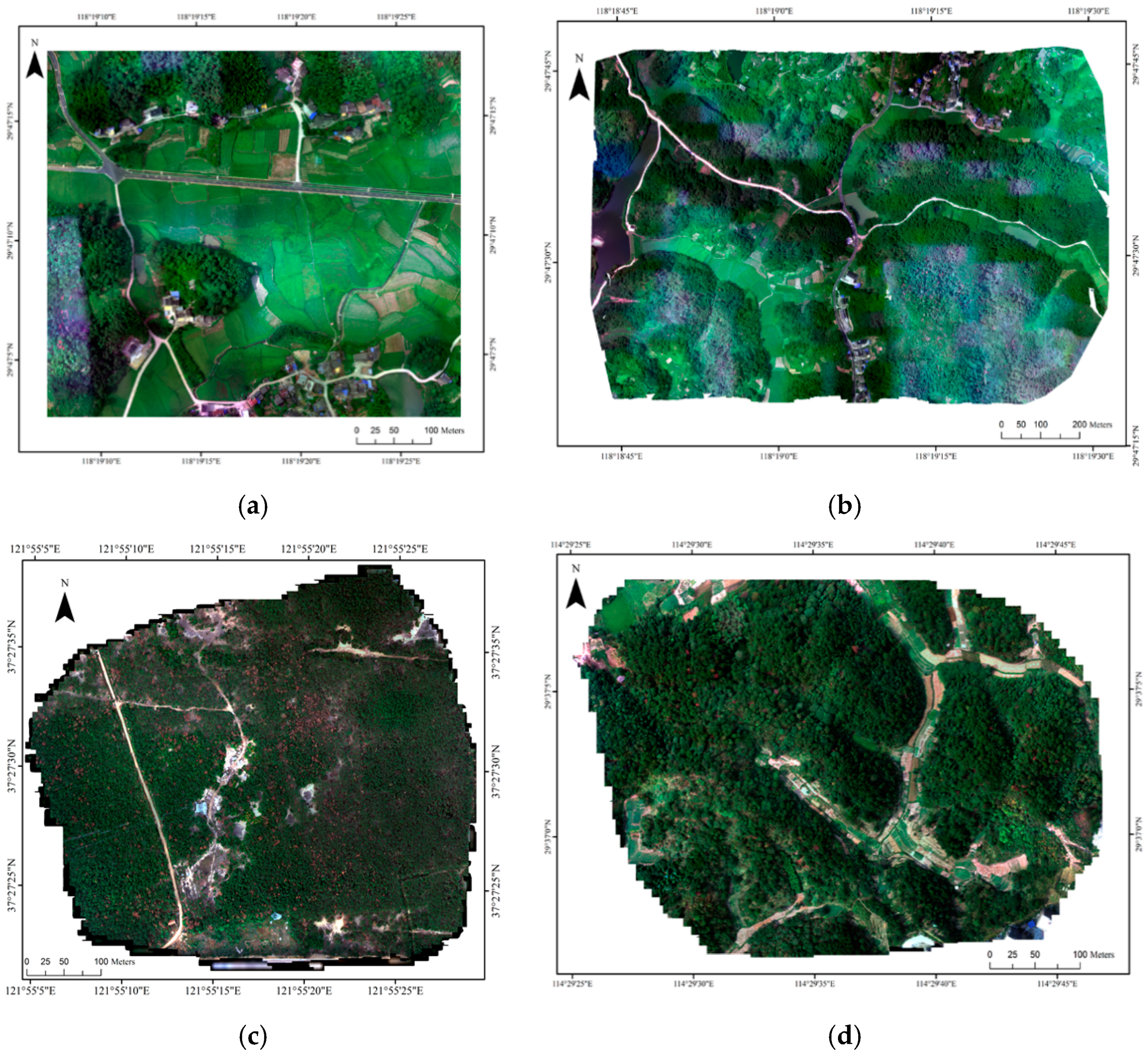
3.1. Data Information
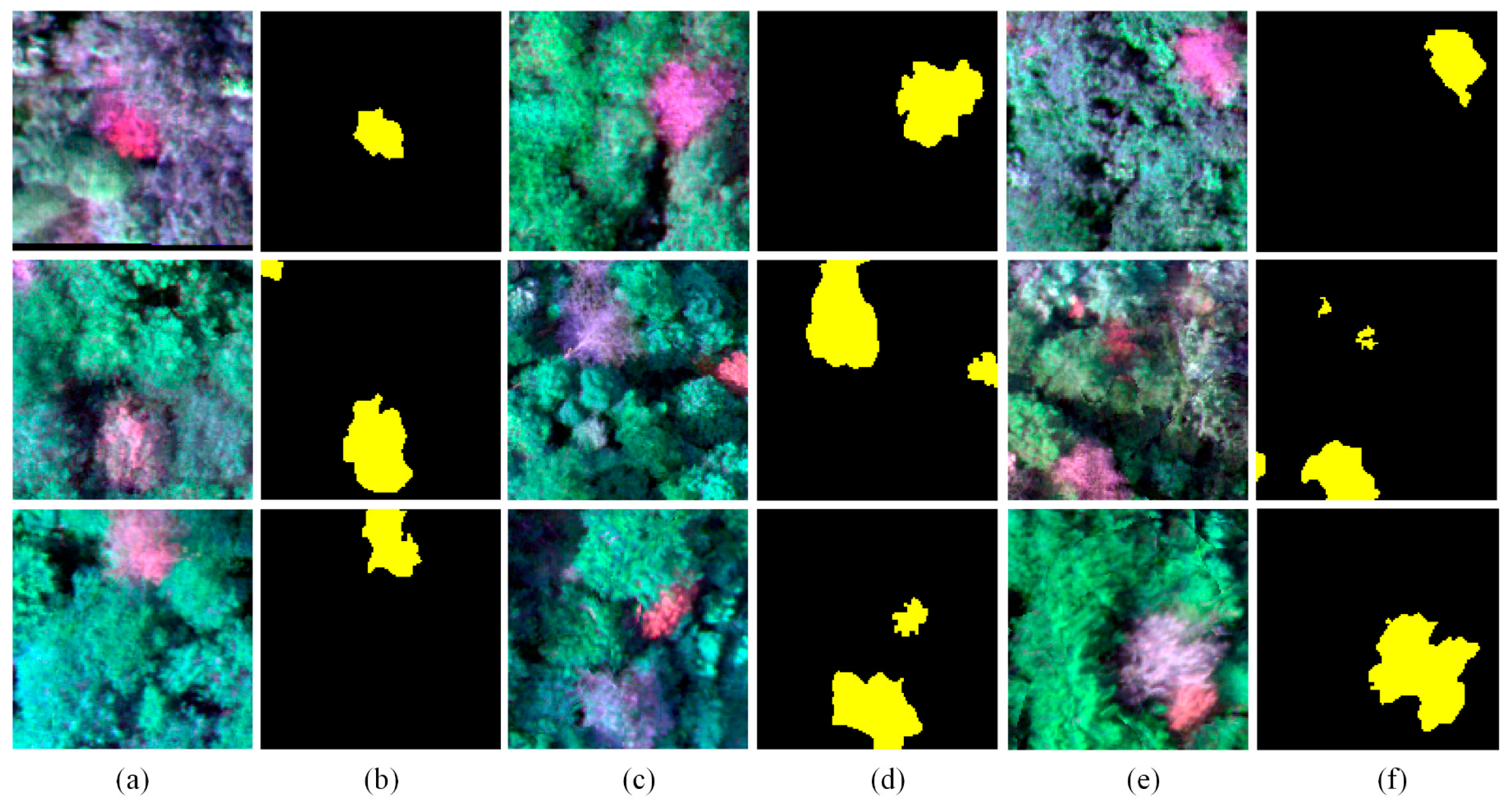
3.2. Dataset Details
4. Results and Analysis
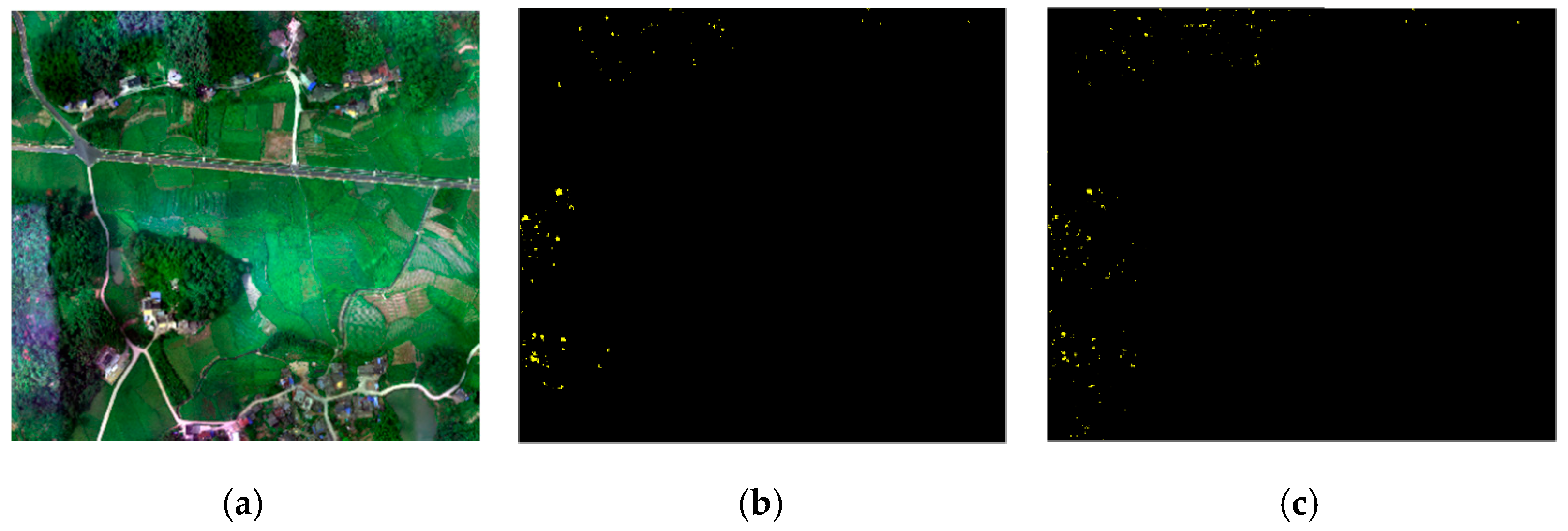
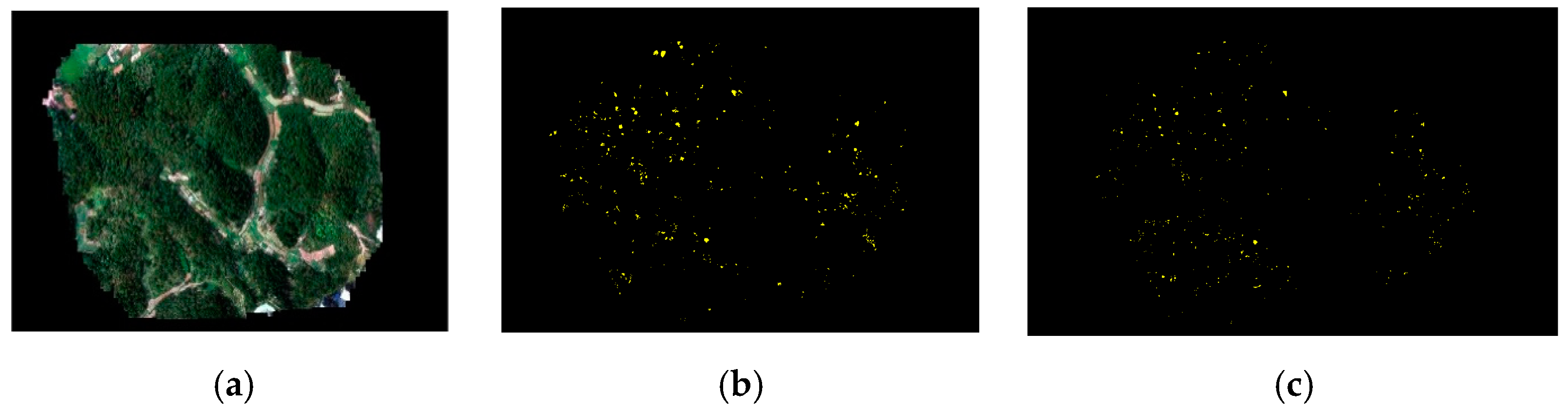
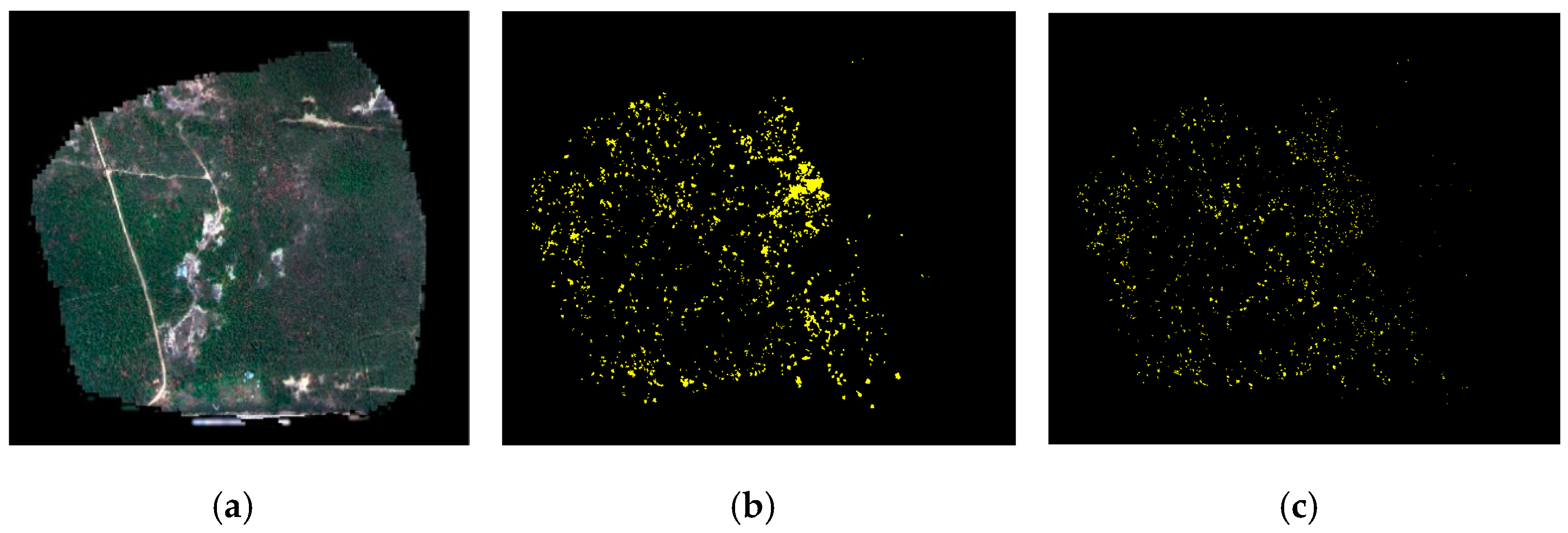
4.1. Identification of Pine Wood Nematode Disease
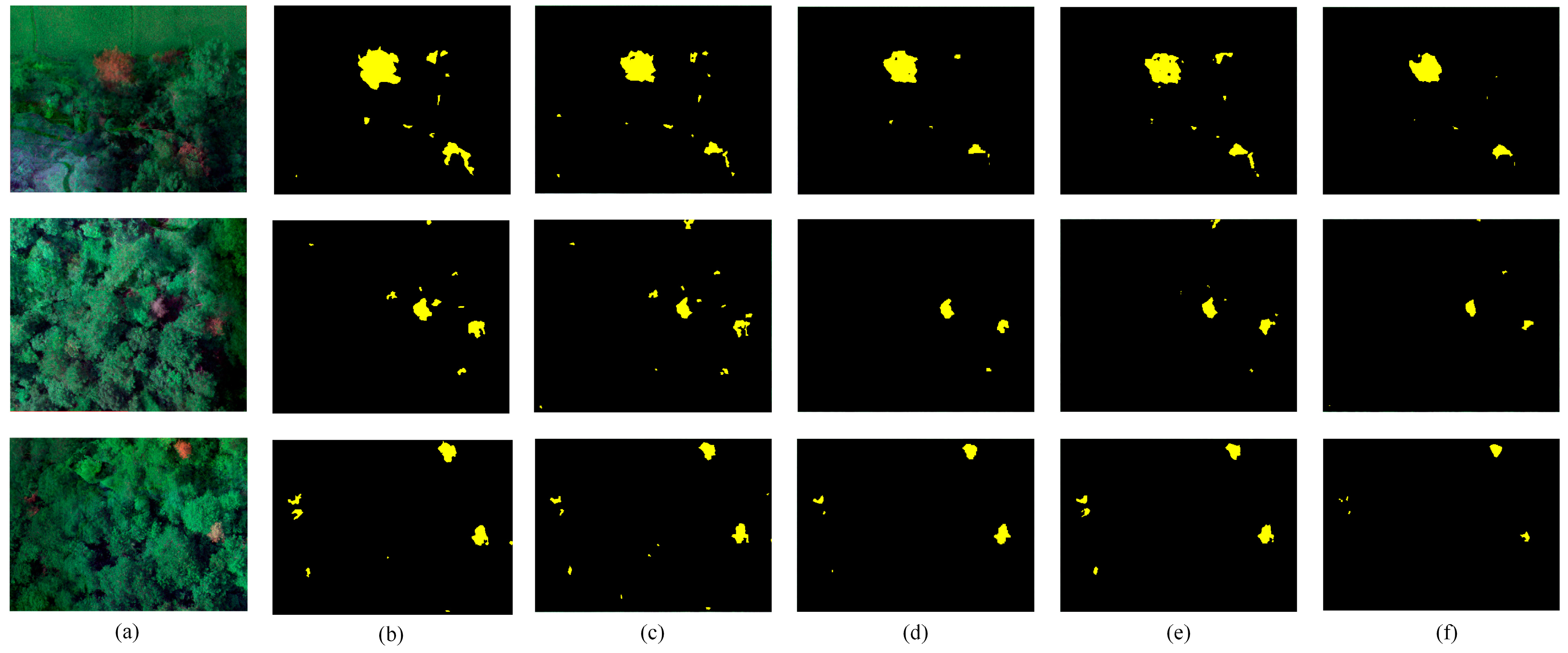
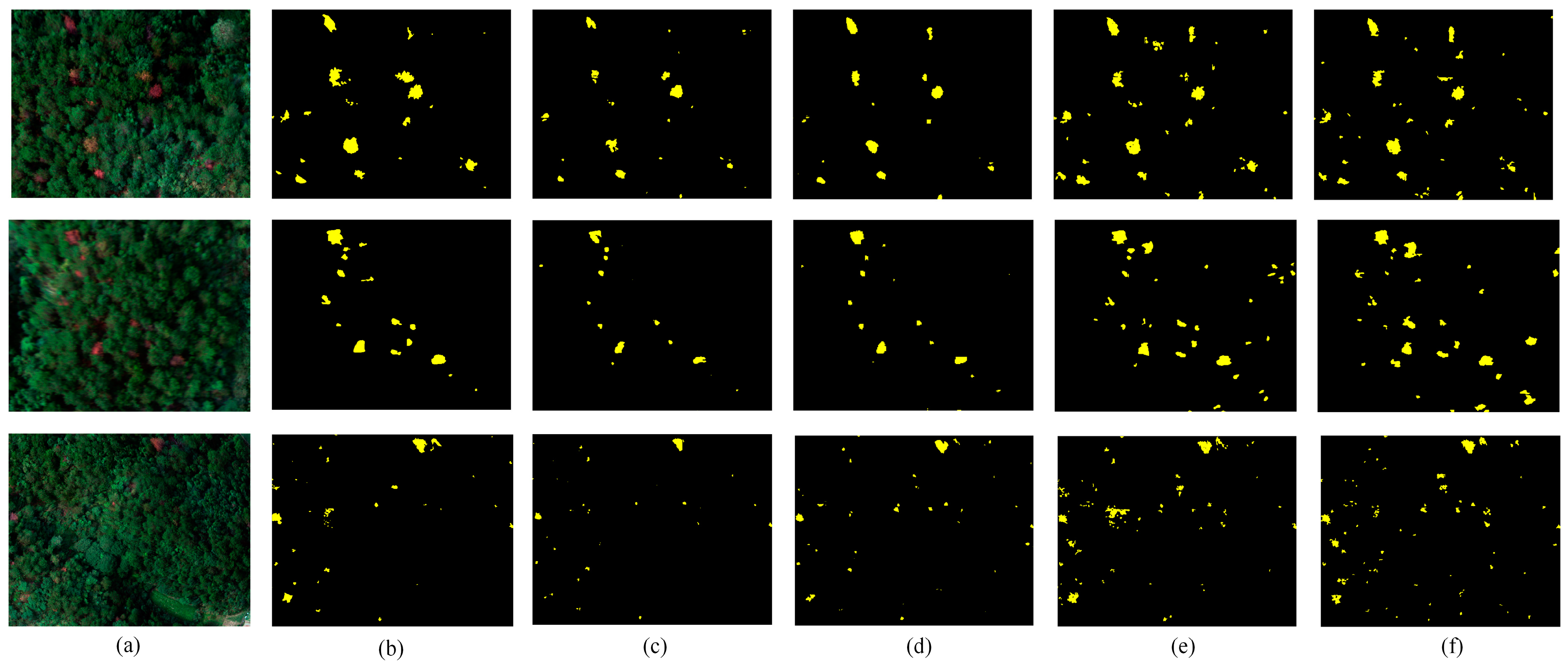
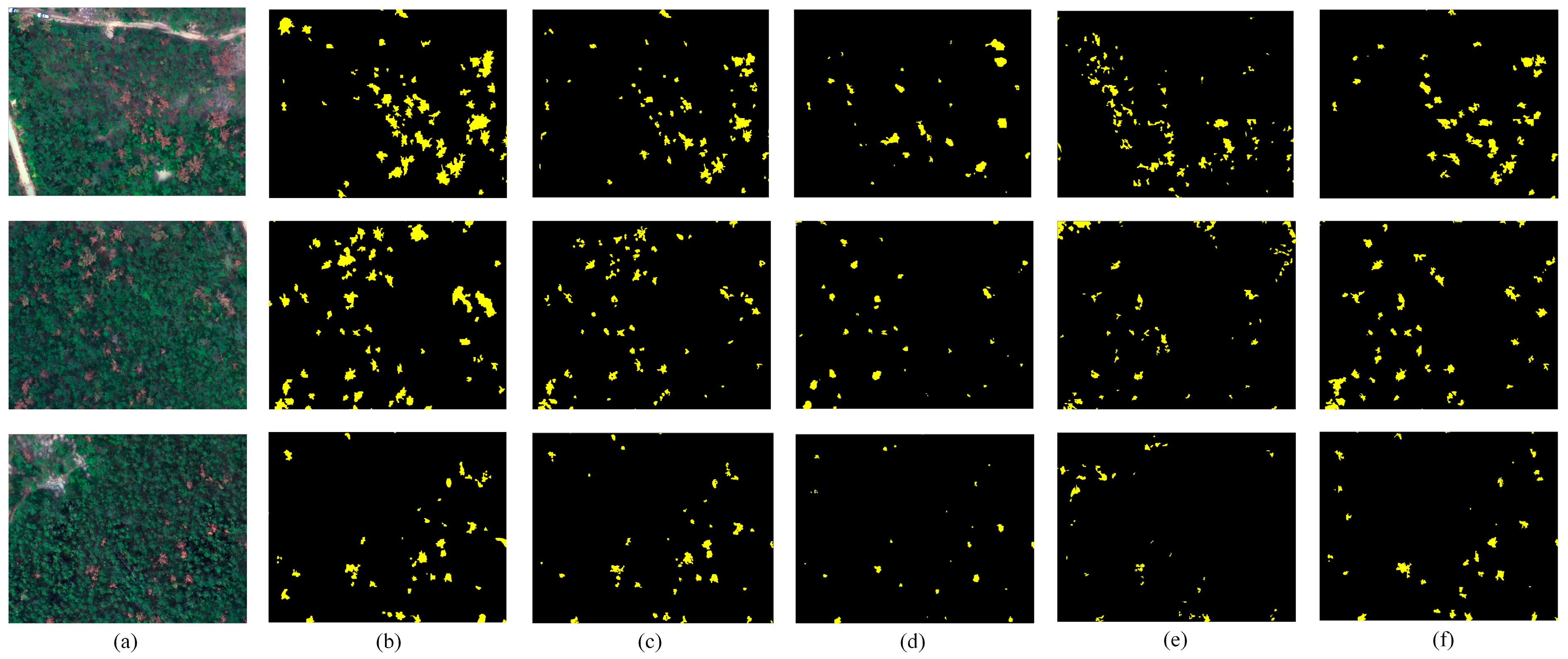
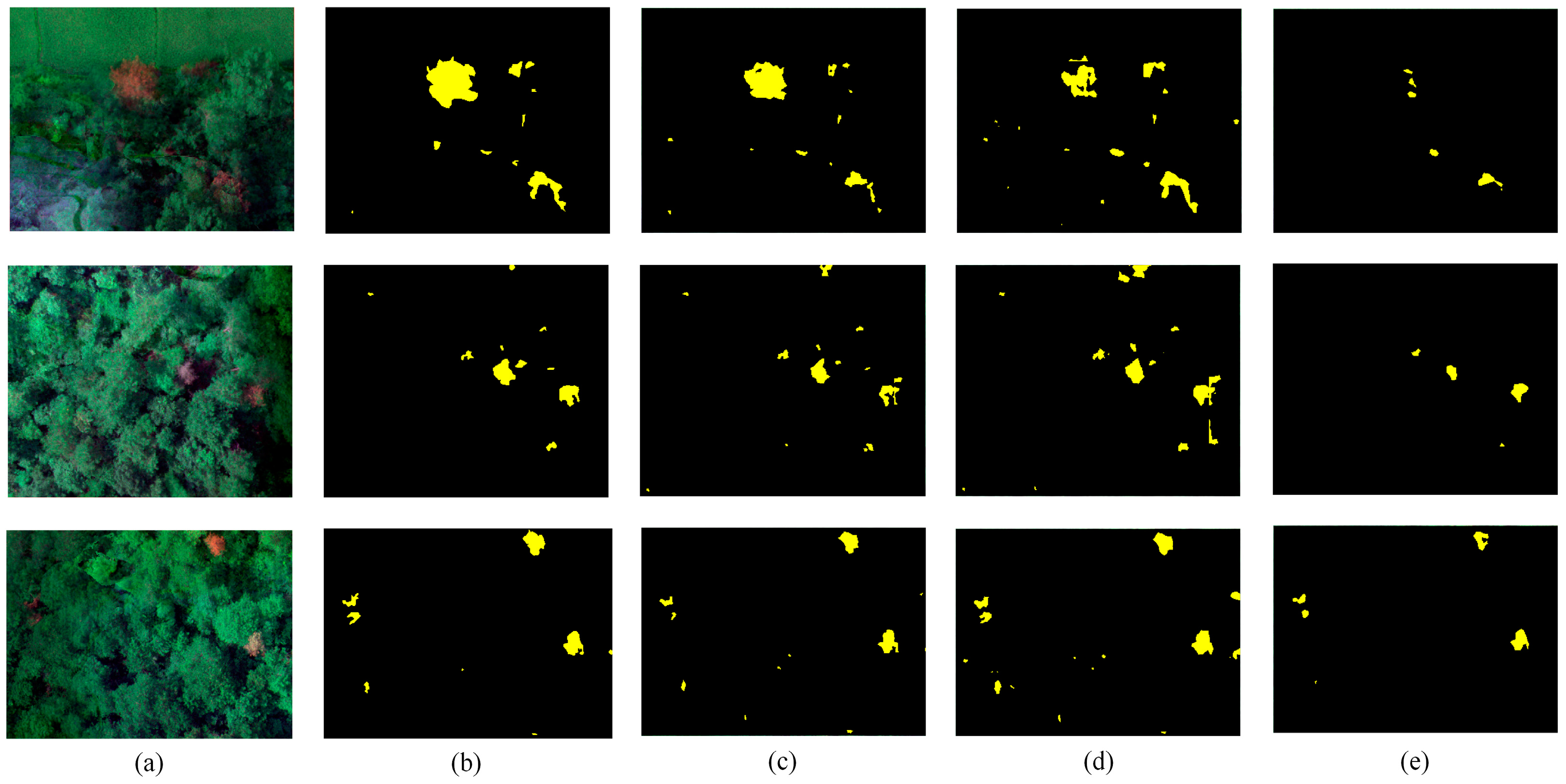
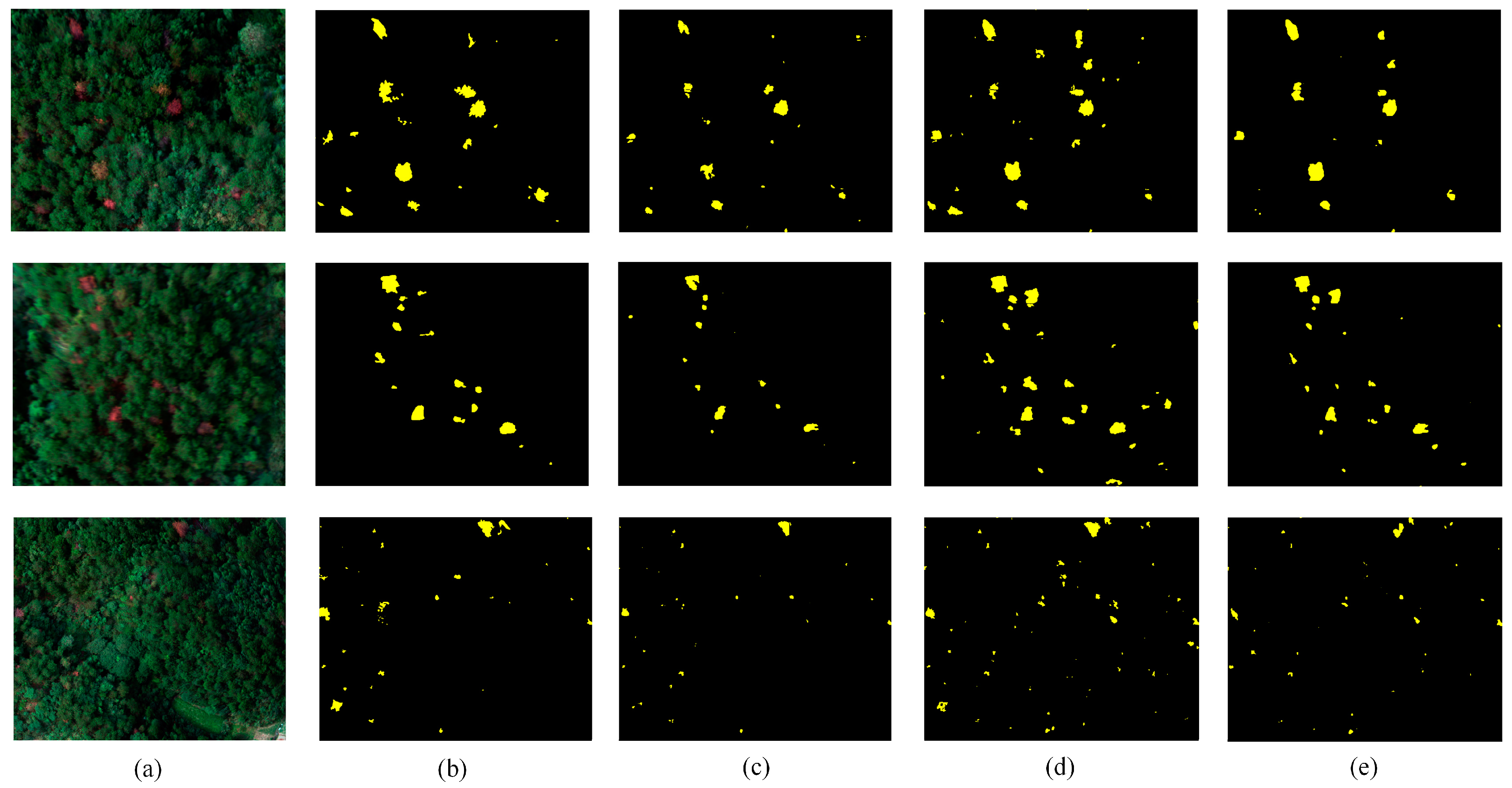
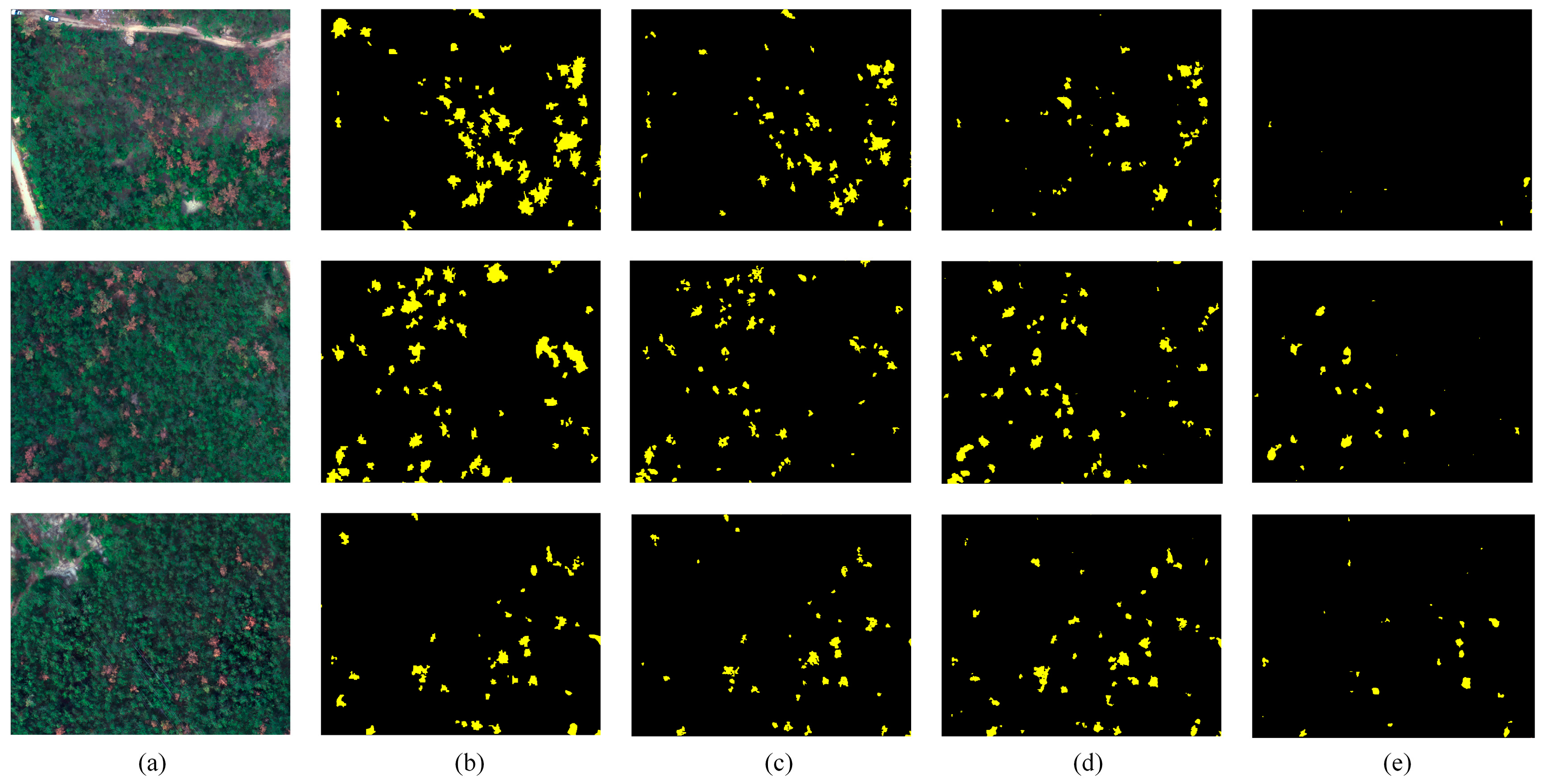
4.2. Comparisons with Related Networks
4.3. Comparison with Ablation Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ye, J. Epidemic Status of Pine Wilt Disease in China and Its Prevention and Control Techniques and Counter Measures. Sci. Silvae Sin. 2019, 55. [Google Scholar] [CrossRef]
- Fuente, B.D.L.; Beck, P.S.A. Management measures to control pine wood nematode spread in Europe. J. Appl. Ecol. 2019, 56. [Google Scholar] [CrossRef]
- Brockhaus, J.A.; Khorram, S.; Bruck, R.I.; Campbell, M.V.; Stallings, C. A comparison of Landsat TM and SPOT HRV data for use in the development of forest defoliation models. Int. J. Remote Sens. 1992, 13, 3235–3240. [Google Scholar] [CrossRef]
- Nakane, K.; Kimura, Y. Assessment of pine forest damage by blight based on Landsat TM data and correlation with environmental factors. Ecol. Res. 1992, 7, 9–18. [Google Scholar] [CrossRef]
- Wu, H. A study of the potential of using worldview-2 of images for the detection of red attack pine tree. In Proceedings of the Eighth International Conference on Digital Image Processing. International Society for Optics and Photonics, Chengu, China, 29 August 2016. [Google Scholar]
- Du, H.; Ge, H.; Fan, W.; Jin, W.; Zhou, Y.; Li, J. Study on relationships between total chlorophyll with hyperspectral features for leaves of Pinus massoniana forest. Spectrosc. Spectr. Anal. 2009, 29, 3033–3037. [Google Scholar]
- Kong, Y.; Huang, Q.; Wang, C.; Chen, J.; Chen, J.; He, D. Long Short-Term Memory Neural Networks for Online Disturbance Detection in Satellite Image Time Series. Remote Sens. 2018, 10, 452. [Google Scholar] [CrossRef]
- Luo, Q.; Xin, W.; Qiming, X. Identification of pests and diseases of Dalbergia hainanensis based on EVI time series and classification of decision tree. Iop Conf. 2017, 69, 012162. [Google Scholar] [CrossRef]
- Shimu, S.A.; Aktar, M.; Afjal, M.I.; Nitu, A.M.; Uddin, M.P.; Mamun, M.A. NDVI Based Change Detection in Sundarban Mangrove Forest Using Remote Sensing Data. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Murakami, T. Forest Remote Sensing Using UAVs. J. Remote Sens. Soc. Jpn. 2018, 38, 258–265. [Google Scholar]
- Mukhopadhyay, A.; Maulik, U. Unsupervised Pixel Classification in Satellite Imagery Using Multiobjective Fuzzy Clustering Combined with SVM Classifier. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1132–1138. [Google Scholar] [CrossRef]
- Meigs, G.W.; Kennedy, R.E.; Cohen, W.B. A Landsat time series approach to characterize bark beetle and defoliator impacts on tree mortality and surface fuels in conifer forests. Remote Sens. Environ. 2011, 115, 3707–3718. [Google Scholar] [CrossRef]
- Kim, B.J.; Jo, M.H.; Oh, J.S.; Lee, K.J.; Park, S.J. Extraction method of damaged area by pine tree pest using remotely sensed data and GIS. In Proceedings of the 22nd Asian Conference on Remote Sensing, Singapore, 5–9 November 2001; Volume 10, pp. 123–134. [Google Scholar]
- Shi, Y.; Skidmore, A.K.; Wang, T.; Stefanie, H.; Uta, H.; Nicole, P.; Xi, Z. Tree species classification using plant functional traits from LiDAR and hyperspectral data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 207–219. [Google Scholar] [CrossRef]
- Hellesen, T.; Matikainen, L. An Object-Based Approach for Mapping Shrub and Tree Cover on Grassland Habitats by Use of LiDAR and CIR Orthoimages. Remote Sens. 2013, 5, 558–583. [Google Scholar] [CrossRef]
- Takenaka, Y.; Katoh, M.; Deng, S.; Cheung, K. Detecting forests damaged by pine wilt disease at the individual tree level using airborne laser data and worldview-2/3 images over two seasons. In Proceedings of the ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Jyväskylä, Finland, 25–27 October 2017; Volume XLII-3/W3, pp. 181–184. [Google Scholar]
- Iordache, M.D.; Mantas, V.; Baltazar, E.; Pauly, K.; Lewyckyj, N. A Machine Learning Approach to Detecting Pine Wilt Disease Using Airborne Spectral Imagery. Remote Sens. 2020, 12, 2280. [Google Scholar] [CrossRef]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and Location of Dead Trees with Pine Wilt Disease Based on Deep Learning and UAV Remote Sensing. AgriEngineering 2020, 2, 294–307. [Google Scholar] [CrossRef]
- Alex, K.; Ilya, S.; Geoffrey, E.H. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 84–90. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar]
- Wu, P.; Yin, Z.; Yang, H.; Wu, Y.L.; Ma, X. Reconstructing Geostationary Satellite Land Surface Temperature Imagery Based on a Multiscale Feature Connected Convolutional Neural Network. Remote Sens. 2019, 11, 300. [Google Scholar] [CrossRef]
- Yao, X.D.; Yang, H.; Wu, Y.L.; Wu, P.H.; Wang, S. Land Use Classification of the Deep Convolutional Neural Network Method Reducing the Loss of Spatial Features. Sensors 2019, 19, 2792. [Google Scholar] [CrossRef]
- Yin, Z.; Wu, P.; Foody, G.M.; Wu, Y.L.; Ling, F. Spatiotemporal Fusion of Land Surface Temperature Based on a Convolutional Neural Network. IEEE Trans. Geoence Remote Sens. 2020, PP(99), 1–15. [Google Scholar] [CrossRef]
- Guo, Q.; Wang, H.; Kang, L.; Li, Z.; Xu, F. Aircraft Target Detection from Spaceborne SAR Image. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Tetila, E.C.; Machado, B.B.; Belete, N.A.S.; Guimaraes, D.A. Identification of Soybean Foliar Diseases Using Unmanned Aerial Vehicle Images. IEEE Geoence Remote Sens. Lett. 2017, 14, 2190–2194. [Google Scholar] [CrossRef]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H.C. Deep Convolutional Neural Networks for Hyperspectral Image Classification. J. Sens. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Minh, D.L.; Syed, I.H.; Irfan, M.; Hyeonjoon, M. UAV based wilt detection system via convolutional neural networks. Sustain. Comput. Inform. Syst. 2020, 28. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. arXiv 2018, arXiv:1802.02611. [Google Scholar]
- Sun, K.; Xiao, B.; Liu, D.; Wang, J. Deep High-Resolution Representation Learning for Human Pose Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–21 June 2019; pp. 5693–5703. [Google Scholar]
- Yang, H.; Wu, P.; Yao, X.; Wu, Y.; Wang, B.; Xu, Y. Building Extraction in very High Resolution Remote Sensing Imagery by Dense-Attention Networks. Remote Sens. 2018, 10, 1768. [Google Scholar] [CrossRef]
- Liao, W.; Coillie, F.V.; Gao, L.; Li, L.; Chanussot, J. Deep Learning for Fusion of APEX Hyperspectral and Full-waveform LiDAR Remote Sensing Data for Tree Species Mapping. IEEE Access 2018, 6, 8716–68729. [Google Scholar]
- Zhou, X.; Wang, Y.; Zhu, Q.; Mao, J.; Xiao, C.; Lu, X.; Zhang, H. A Surface Defect Detection Framework for Glass Bottle Bottom Using Visual Attention Model and Wavelet Transform. IEEE Trans. Ind. Informatics 2019, 16, 2189–2201. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Laurens, V.D.M.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 40, 834–848. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking Atrous Convolution for Semantic Image Segmentation. arXiv 2017, arXiv:1706.05587v2. [Google Scholar]
- Peng, C.; Zhang, X.; Yu, G.; Luo, G.; Sun, J. Large Kernel Matters—Improve Semantic Segmentation by Global Convolutional Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1743–1751. [Google Scholar] [CrossRef]
- He, Y.; Chen, G.; Potter, C.; Meentemeyer, R.K. Integrating multi-sensor remote sensing and species distribution modeling to map the spread of emerging forest disease and tree mortality. Remote. Sens. Environ. 2019, 231, 111238. [Google Scholar] [CrossRef]
- Wang, S.; Yang, H.; Wu, Q.; Zheng, Z.; Wu, Y.L.; Li, J. An Improved Method for Road Extraction from High-Resolution Remote-Sensing Images that Enhances Boundary Information. Sensors 2020, 20, 2064. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Huangshan-1 | Huangshan-2 | Wuhan | Yantai |
|---|---|---|---|---|
| Locate | Anhui Province | Anhui Province | Hubei Province | Shandong Province |
| Flight height | 150 m | 150 m | 200 m | 160 m |
| Spatial resolution | 0.1 m | 0.1 m | 0.125 m | 0.1 m |
| Flight date | 2019-08-12 | 2019-08-13 | 2019-8-21 | 2019-10-16 |
| Centre coordinates | E118°19′12″ N29°47′19″ | E118°18′44″ N29°47′33″ | E114°29′36″ N27°37′03″ | E121°55′18″ N37°27′30″ |
| Wavelength (nm) | Blue: 475 nm Green: 560 nm Red: 670 nm RedEdge: 720 nm Near IR: 840 nm | |||
| Images | Total Visual Interpretation | Total Number of Identification | Correct Number | Overall Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|
| Huangshan-1 | 186 | 203 | 174 | 80.93% | 0.85 | 0.94 |
| Wuhan | 515 | 521 | 453 | 77.70% | 0.87 | 0.88 |
| Yantai | 1005 | 1090 | 927 | 79.37% | 0.85 | 0.92 |
| Mean | - | - | - | 79.33% | 0.86 | 0.91 |
| Images | Total Number of Checkpoint | Correct Number | Recall | Missing Alarm |
|---|---|---|---|---|
| Huangshan-1 | 59 | 55 | 0.93 | 0.07 |
| Images | Models | Total Visual Interpretation | Number of Identification | Correct Number | Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|---|
| Huangshan-1 | SCANet | 186 | 203 | 174 | 80.93% | 0.86 | 0.94 |
| Deeplab V3+ | 186 | 173 | 146 | 68.54% | 0.84 | 0.78 | |
| HRNet | 186 | 175 | 152 | 72.73% | 0.87 | 0.82 | |
| DenseNet | 186 | 189 | 160 | 74.42% | 0.85 | 0.86 | |
| Wuhan | SCANet | 515 | 521 | 453 | 77.70% | 0.87 | 0.88 |
| Deeplab V3+ | 515 | 801 | 385 | 41.53% | 0.48 | 0.75 | |
| HRNet | 515 | 460 | 326 | 50.23% | 0.71 | 0.63 | |
| DenseNet | 515 | 691 | 405 | 50.56% | 0.59 | 0.79 | |
| Yantai | SCANet | 1005 | 1090 | 927 | 79.37% | 0.85 | 0.92 |
| Deeplab V3+ | 1005 | 1098 | 787 | 59.80% | 0.72 | 0.78 | |
| HRNet | 1005 | 900 | 617 | 47.80% | 0.69 | 0.61 | |
| DenseNet | 1005 | 1340 | 660 | 39.17% | 0.49 | 0.65 |
| Images | Models | Total Visual Interpretation | Number of Identification | Correct Number | Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|---|
| Huangshan-1 | SCANet | 186 | 203 | 174 | 80.93% | 0.86 | 0.94 |
| SNet | 186 | 297 | 169 | 53.82% | 0.57 | 0.91 | |
| CANet | 186 | 126 | 65 | 26.31% | 0.58 | 0.35 | |
| Wuhan | SCANet | 515 | 521 | 453 | 77.70% | 0.87 | 0.88 |
| SNet | 515 | 711 | 462 | 60.47% | 0.65 | 0.90 | |
| CANet | 515 | 367 | 205 | 30.28% | 0.56 | 0.40 | |
| Yantai | SCANet | 1005 | 1090 | 927 | 79.37% | 0.85 | 0.92 |
| SNet | 1005 | 1368 | 900 | 61.09% | 0.66 | 0.90 | |
| CANet | 1005 | 565 | 326 | 26.21% | 0.57 | 0.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. https://doi.org/10.3390/rs13020162
Qin J, Wang B, Wu Y, Lu Q, Zhu H. Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sensing. 2021; 13(2):162. https://doi.org/10.3390/rs13020162
Chicago/Turabian StyleQin, Jun, Biao Wang, Yanlan Wu, Qi Lu, and Haochen Zhu. 2021. "Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms" Remote Sensing 13, no. 2: 162. https://doi.org/10.3390/rs13020162
APA StyleQin, J., Wang, B., Wu, Y., Lu, Q., & Zhu, H. (2021). Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sensing, 13(2), 162. https://doi.org/10.3390/rs13020162