
FLATSIM: The ForM@Ter LArge-Scale Multi-Temporal Sentinel-1 InterferoMetry Service

 , , , ,
, , , , 
Abstract
:1. Introduction
2. The NSBAS Processing Chain Used in the FLATSIM Service
2.1. Main Steps
- Import all available S-1 data with VV polarization for a given track in a given region of interest defined by its maximum and minimum latitudes (ROI);
- Import and assemble the digital elevation model (DEM) encompassing the area covered by the downloaded S-1 data. We use the DEM from the Shuttle Radar Topography Mission (SRTM) [44];
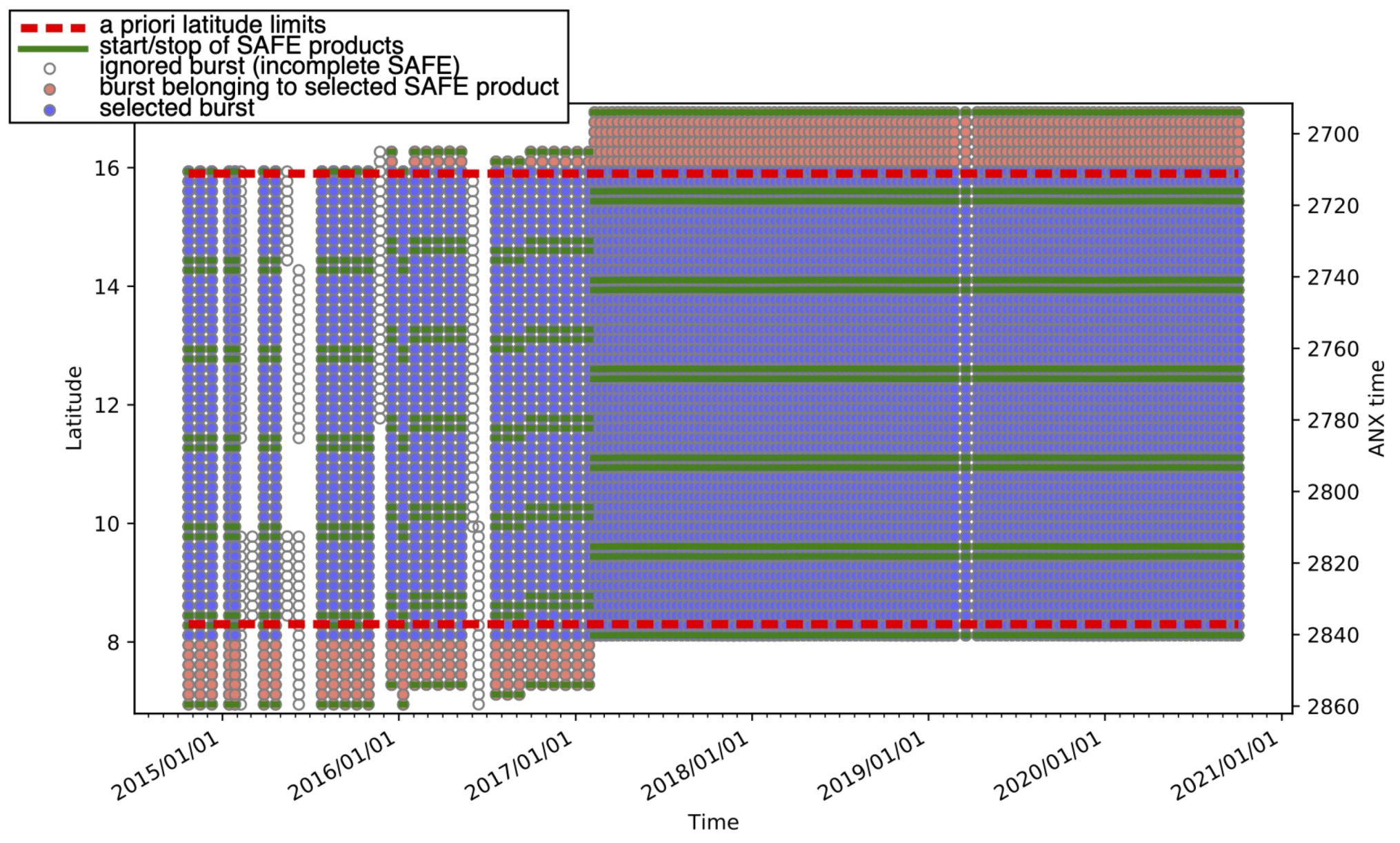
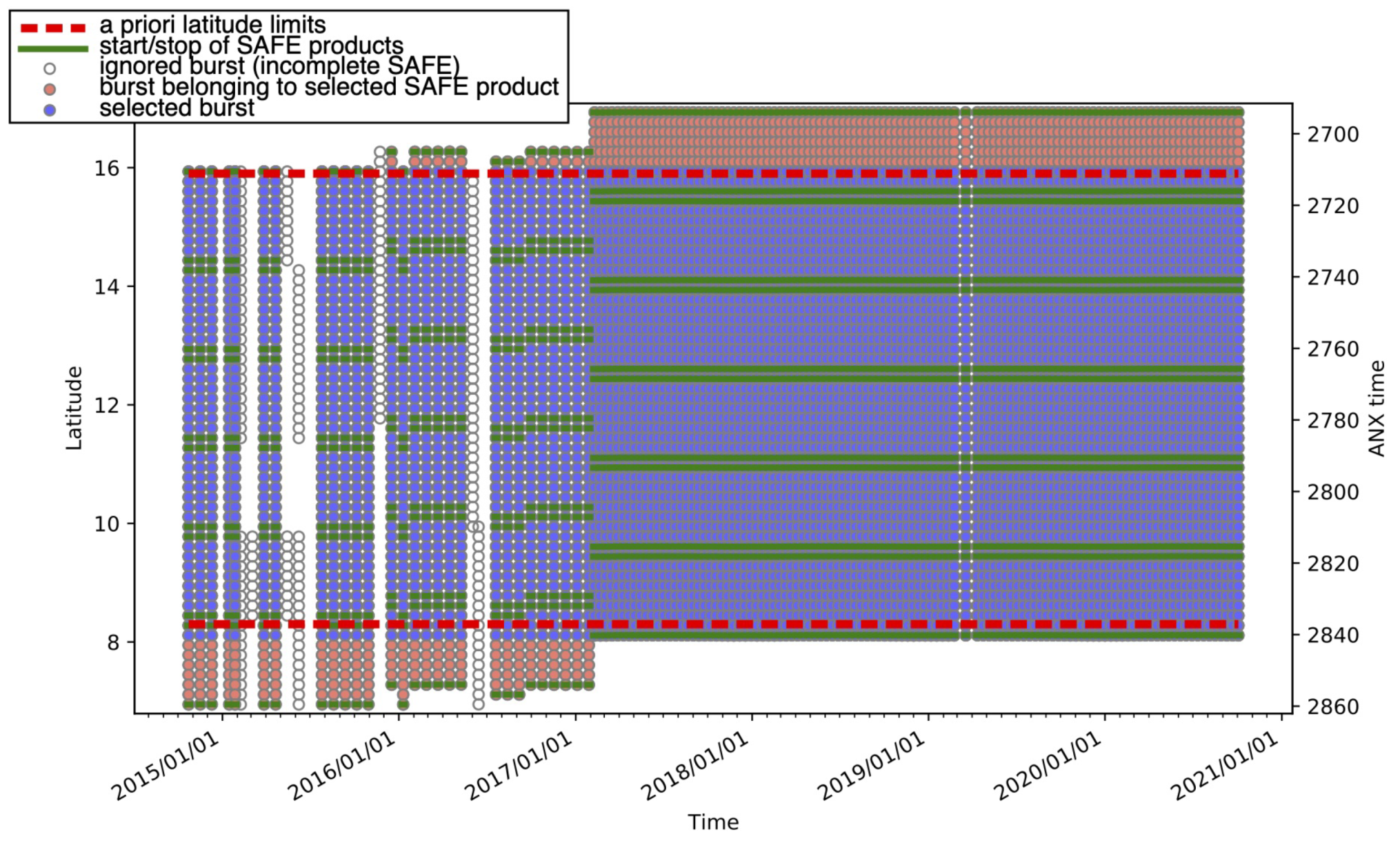
- Select bursts for each subswath independently and retain only complete acquisitions within the chosen latitude range;
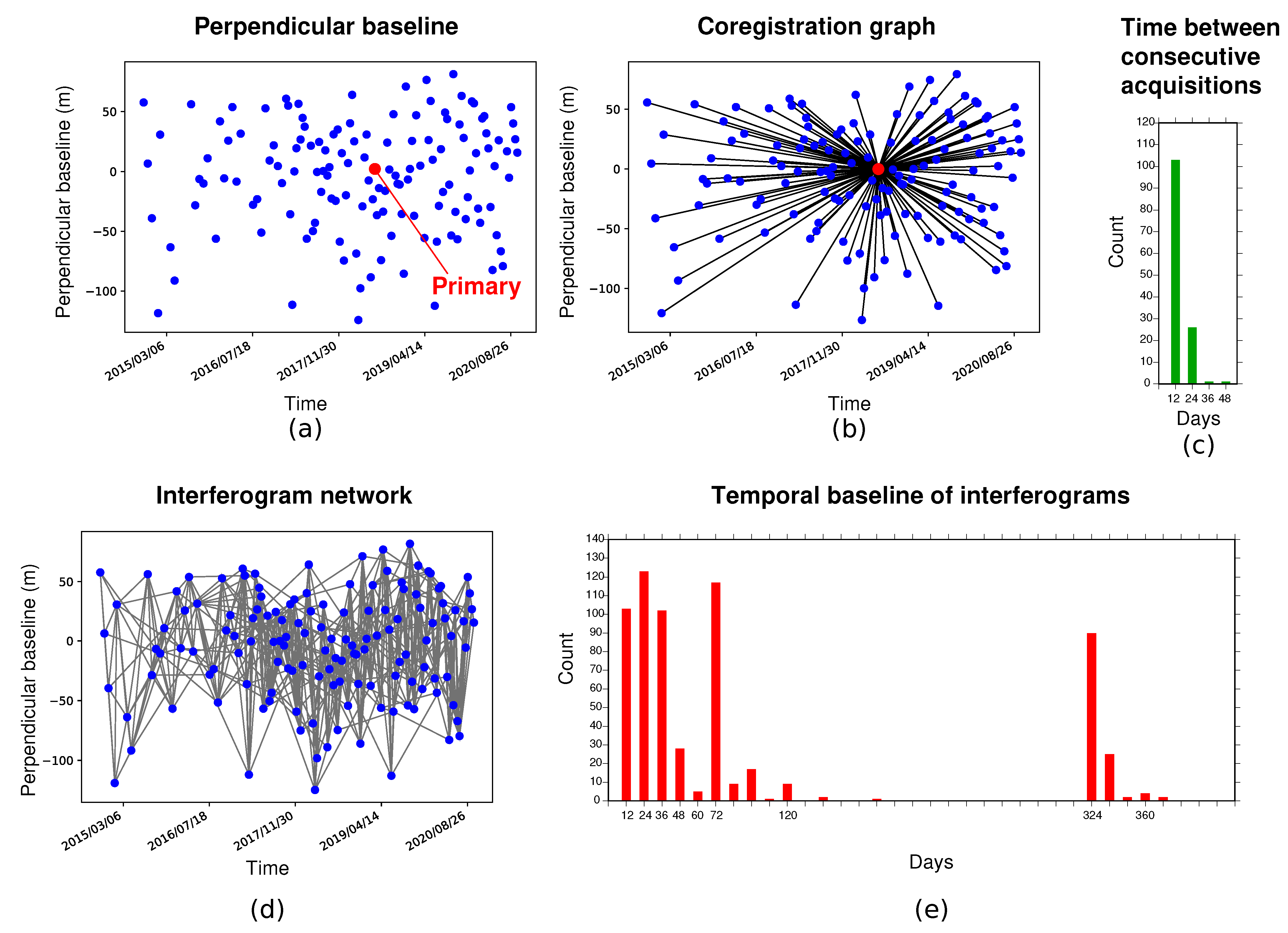
- Download precise orbits, compute perpendicular, and temporal baselines, and choose a single primary date common for the three subswaths;
- For each subswath, assemble bursts into Single Look Complex data (SLC), transform the DEM in the primary date radar geometry, and compute the geometrical transformations of all secondary SLCs on the geometry of the primary acquisition, combining orbit, DEM, and correlation offsets information;
- For each subswath, reassemble secondary SLCs using the position of the burst limits from the primary image and an improved deramping function, and resample secondary SLCs on the primary geometry;
- Define the interferometric network and computes differential interferograms for each subswath;
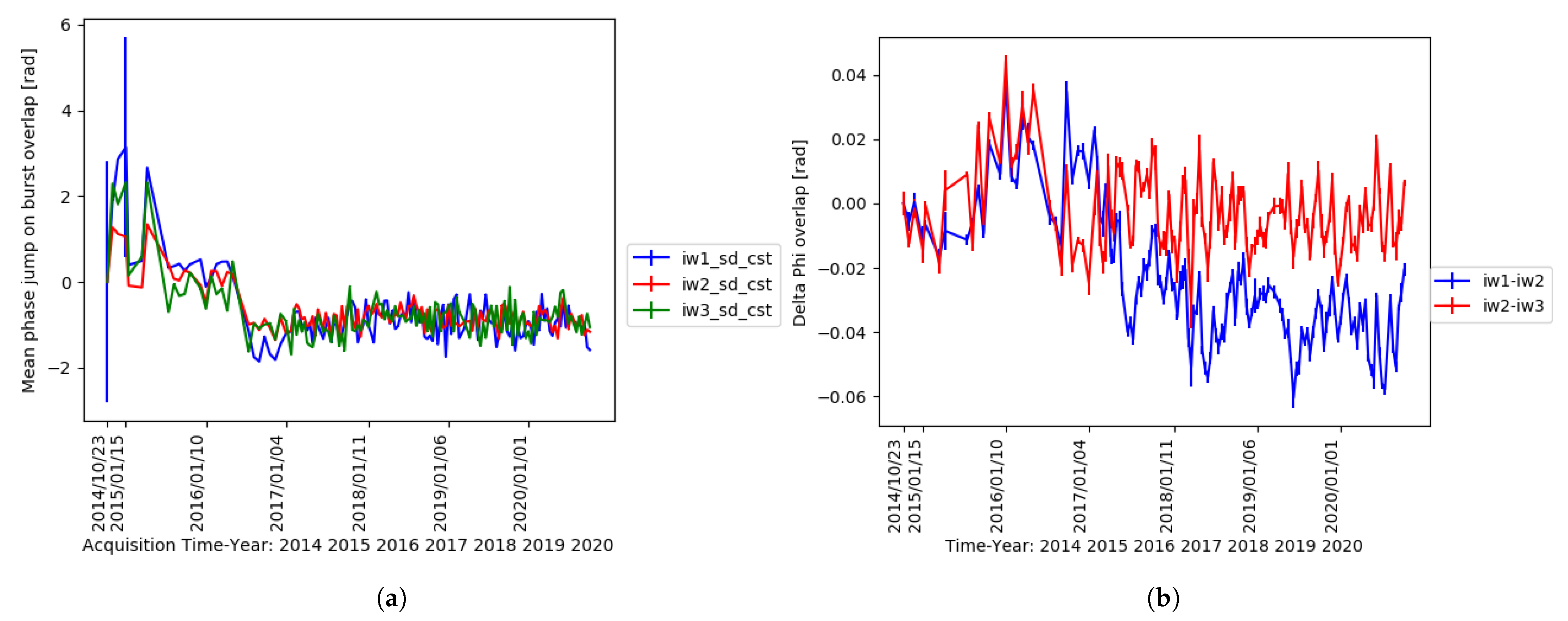
- For each subswath, evaluate spectral diversity parameters and correct interferograms;
- Merge the subswaths of all interferograms and of some auxiliary images using available metadata and inverted phase jumps in subswath overlaps;
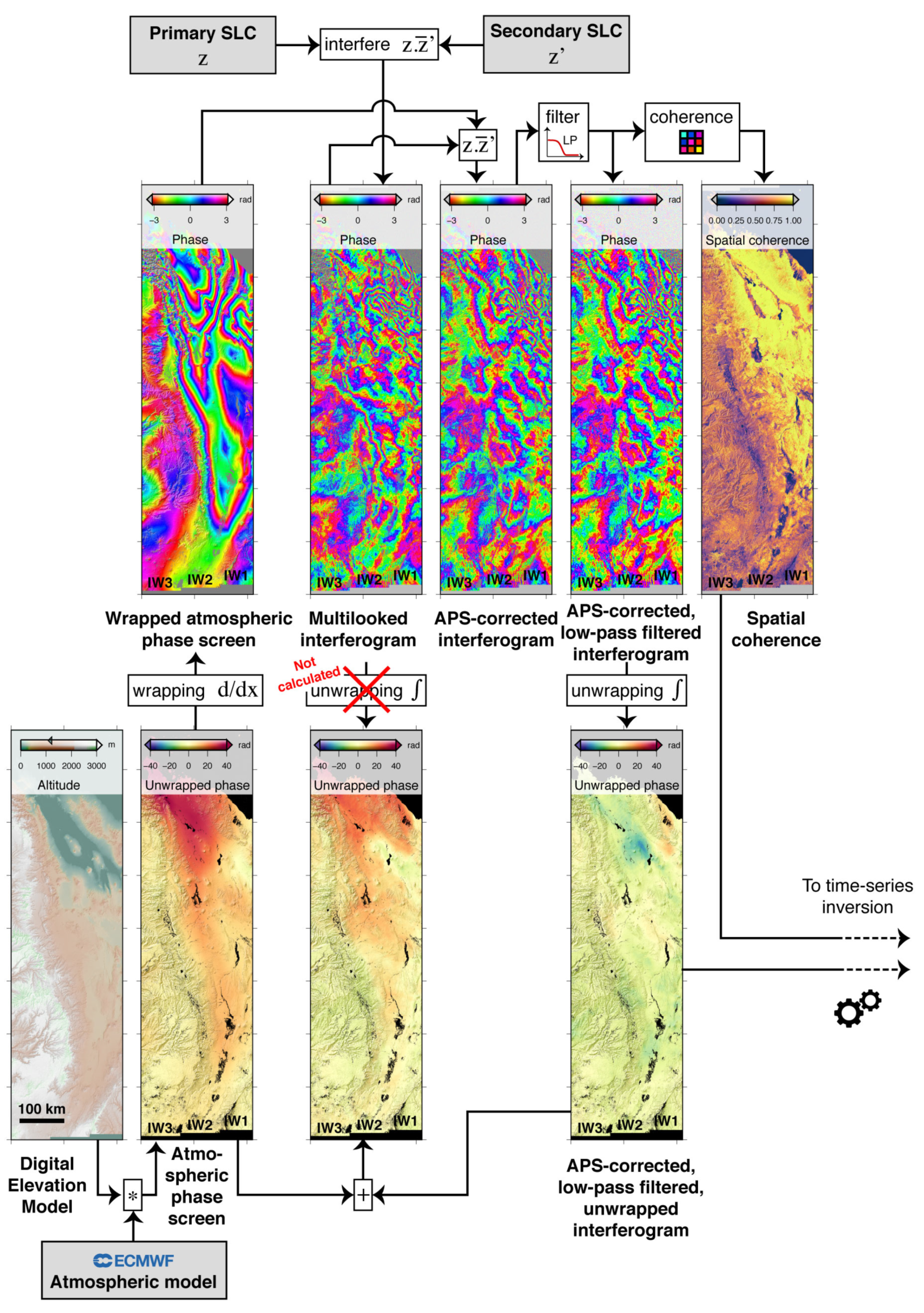
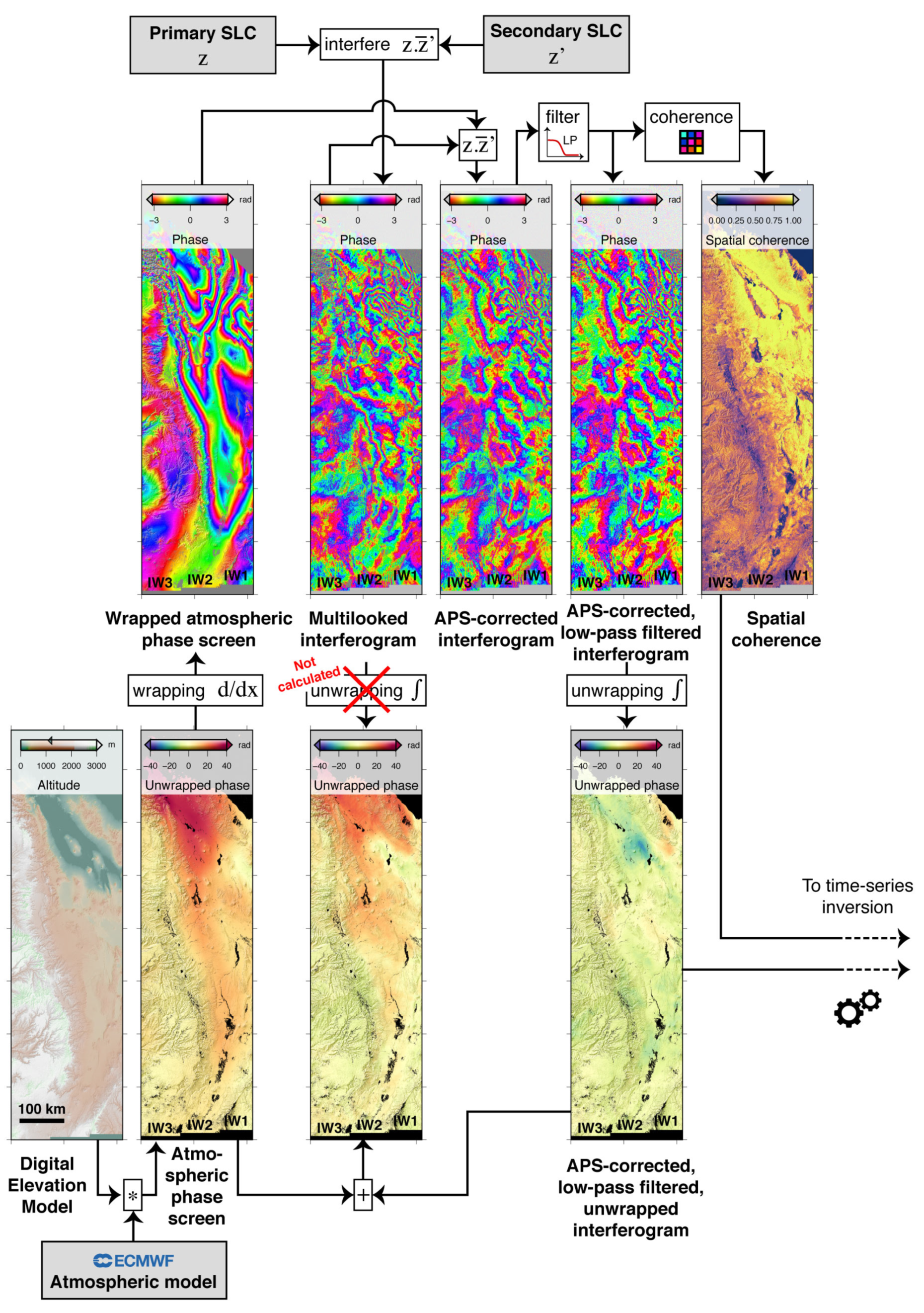
- Correct interferograms from stratified atmospheric effects, multi-look, filter, unwrap, remove phase ramps in range and azimuth and reference;
- Discard possible low quality interferograms based on their phase variance or unwrapping fraction;
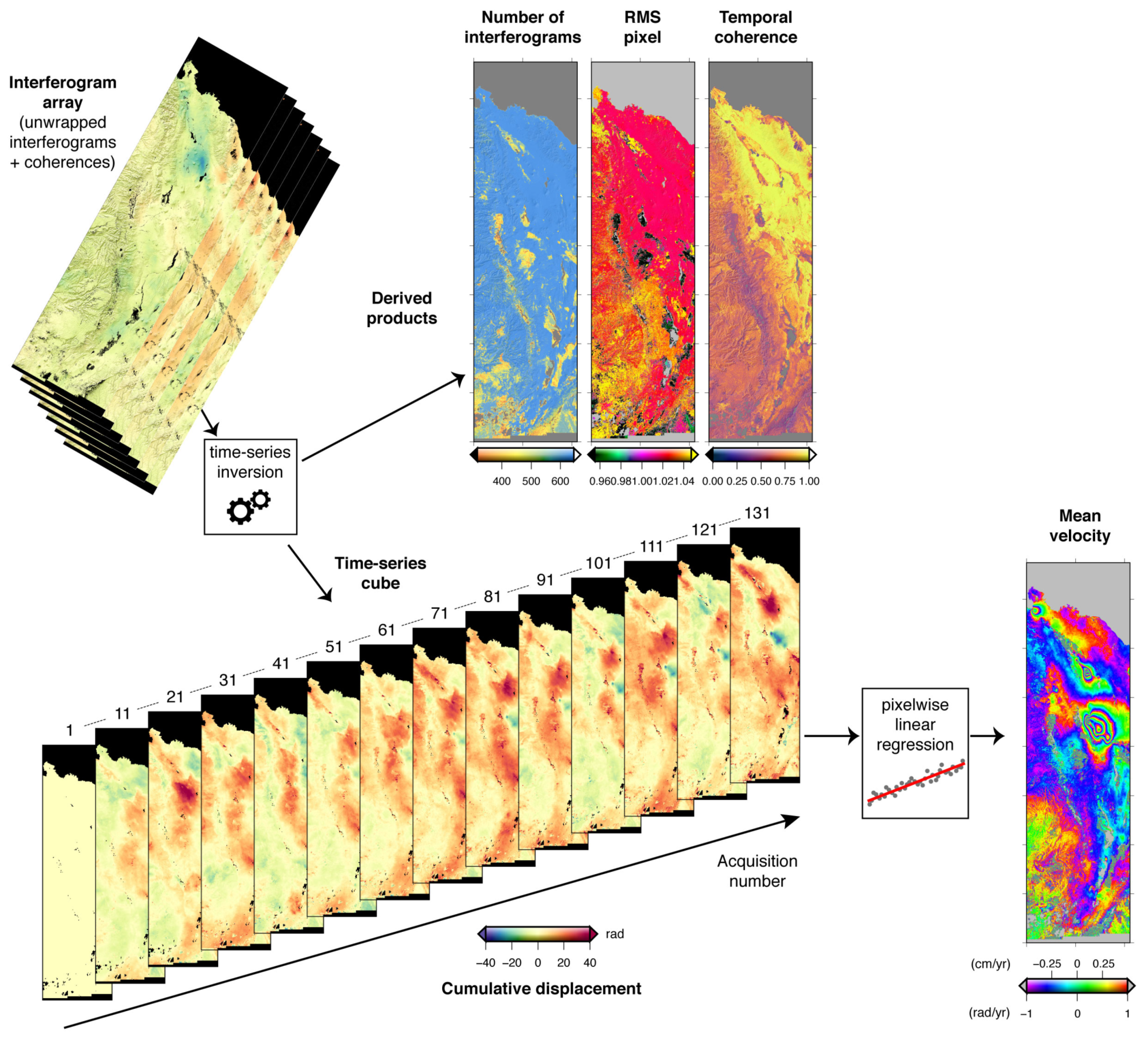
- Invert interferograms into time series and provide quality indicators;
- Prepare products in tiff or geotiff format, together with metadata, previews, and text files.
2.2. Burst Selection
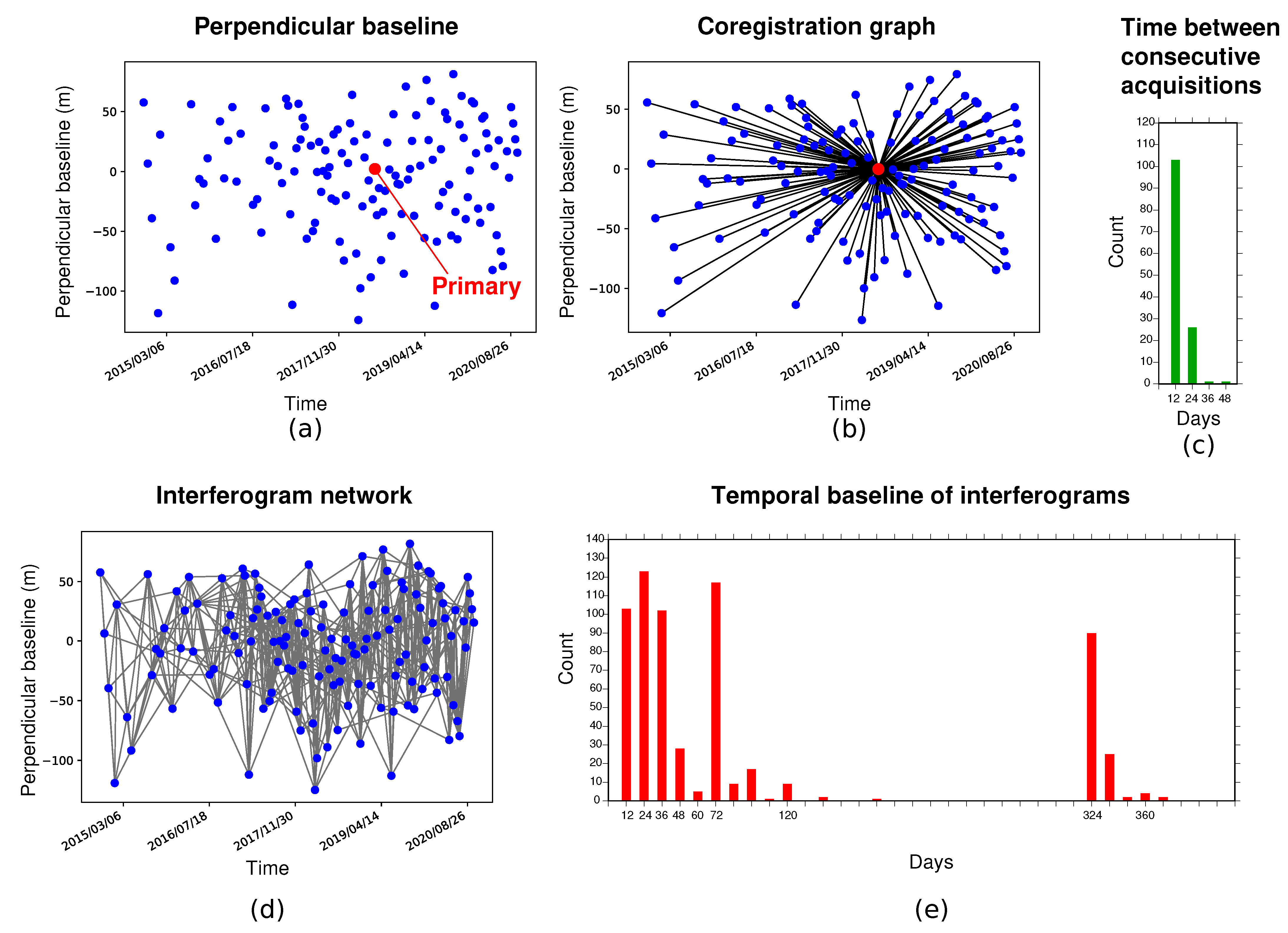
2.3. Coregistration and Interferometric Network Selection
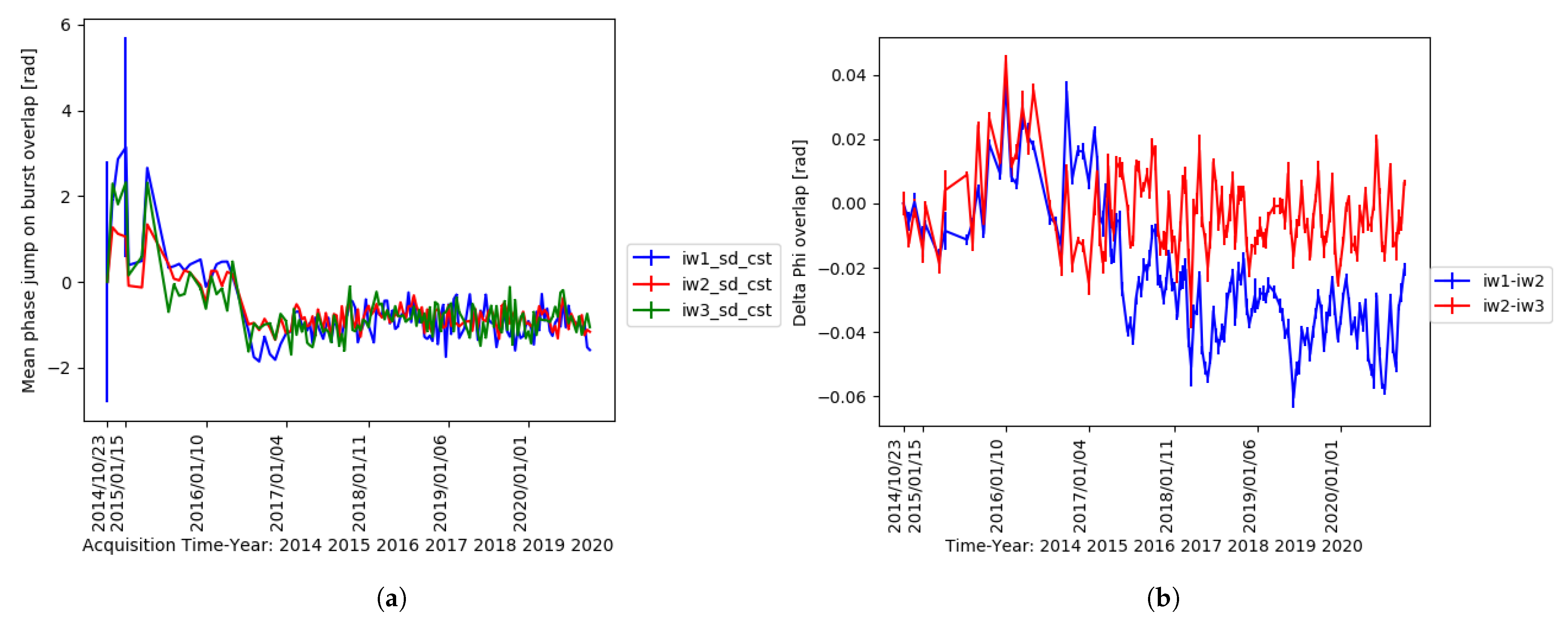
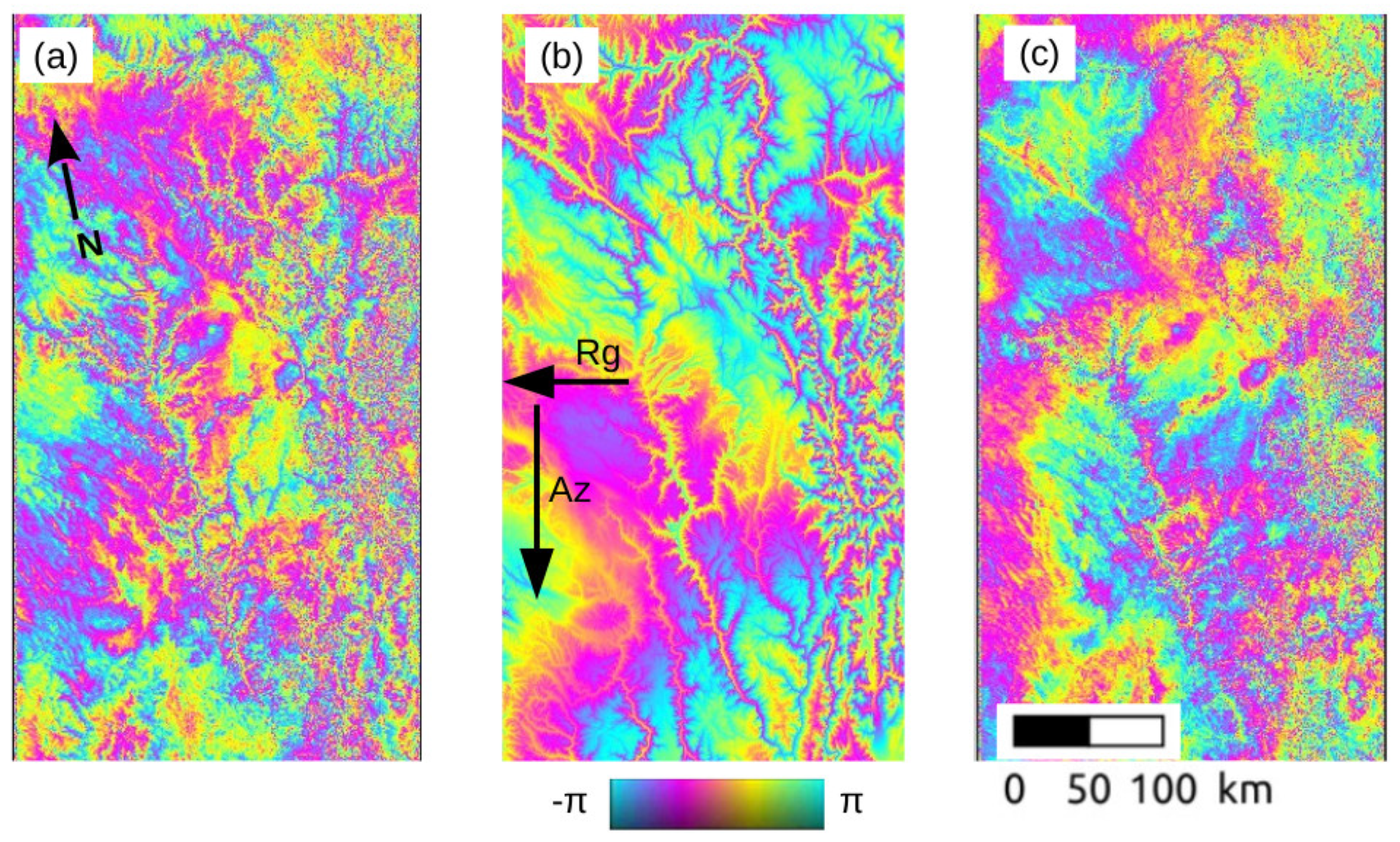
2.4. Enhanced Spectral Diversity Correction
2.5. Stratified Atmospheric Correction
2.6. Interferogram Multi-Looking, Filtering, and Unwrapping
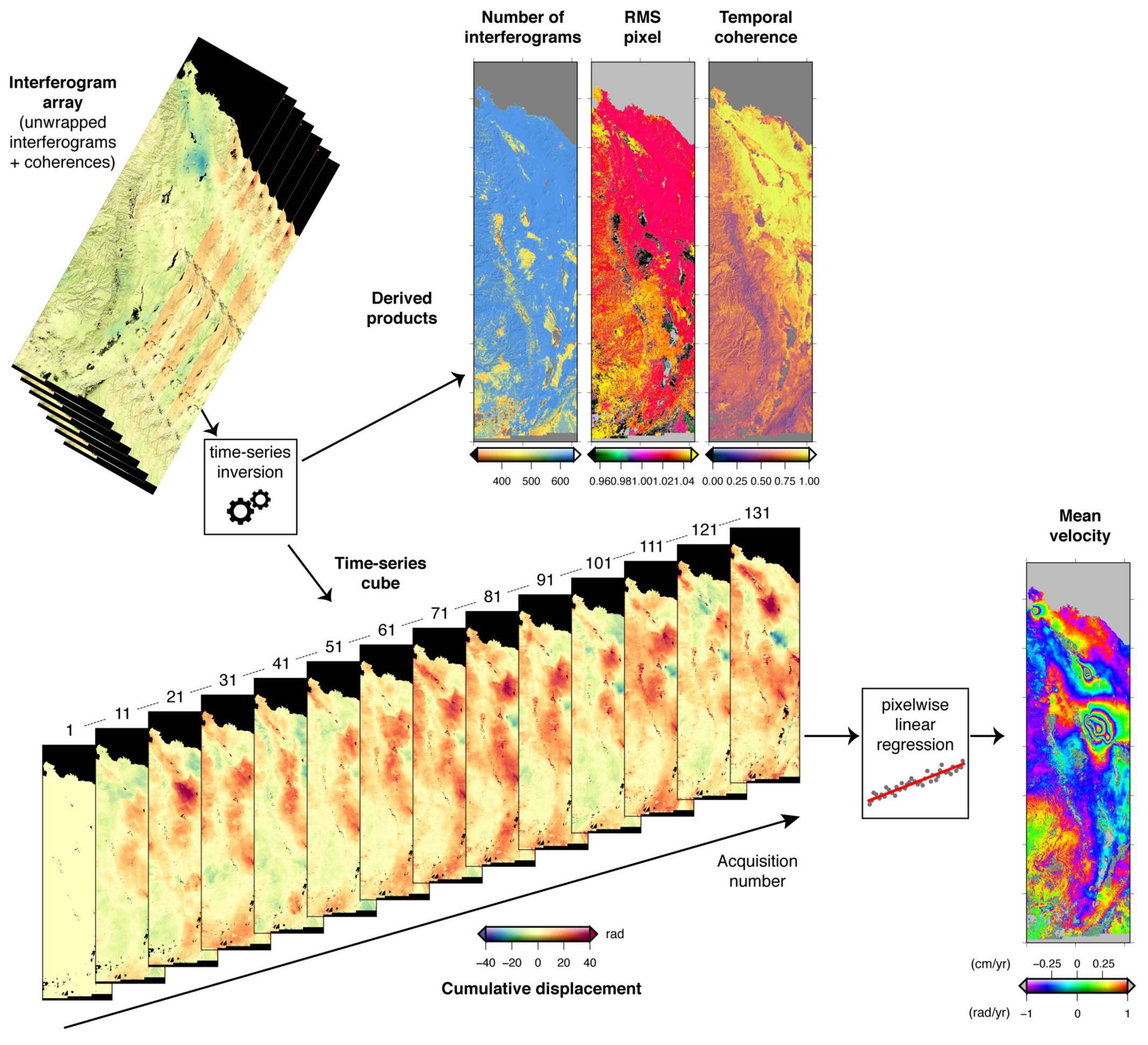
2.7. Time Series Inversion
3. FLATSIM Architecture
3.1. Architecture of the FLATSIM Project: Distributed and Scalable by Design
3.2. Architecture of the CNES HPC Infrastructure
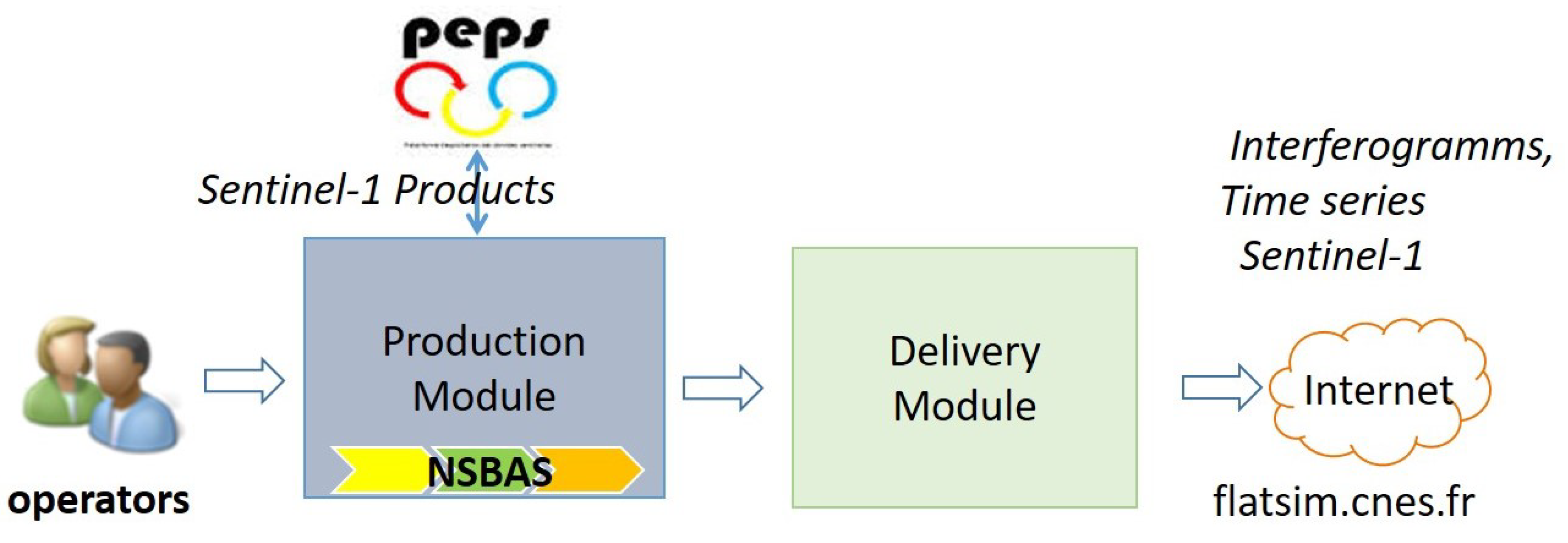
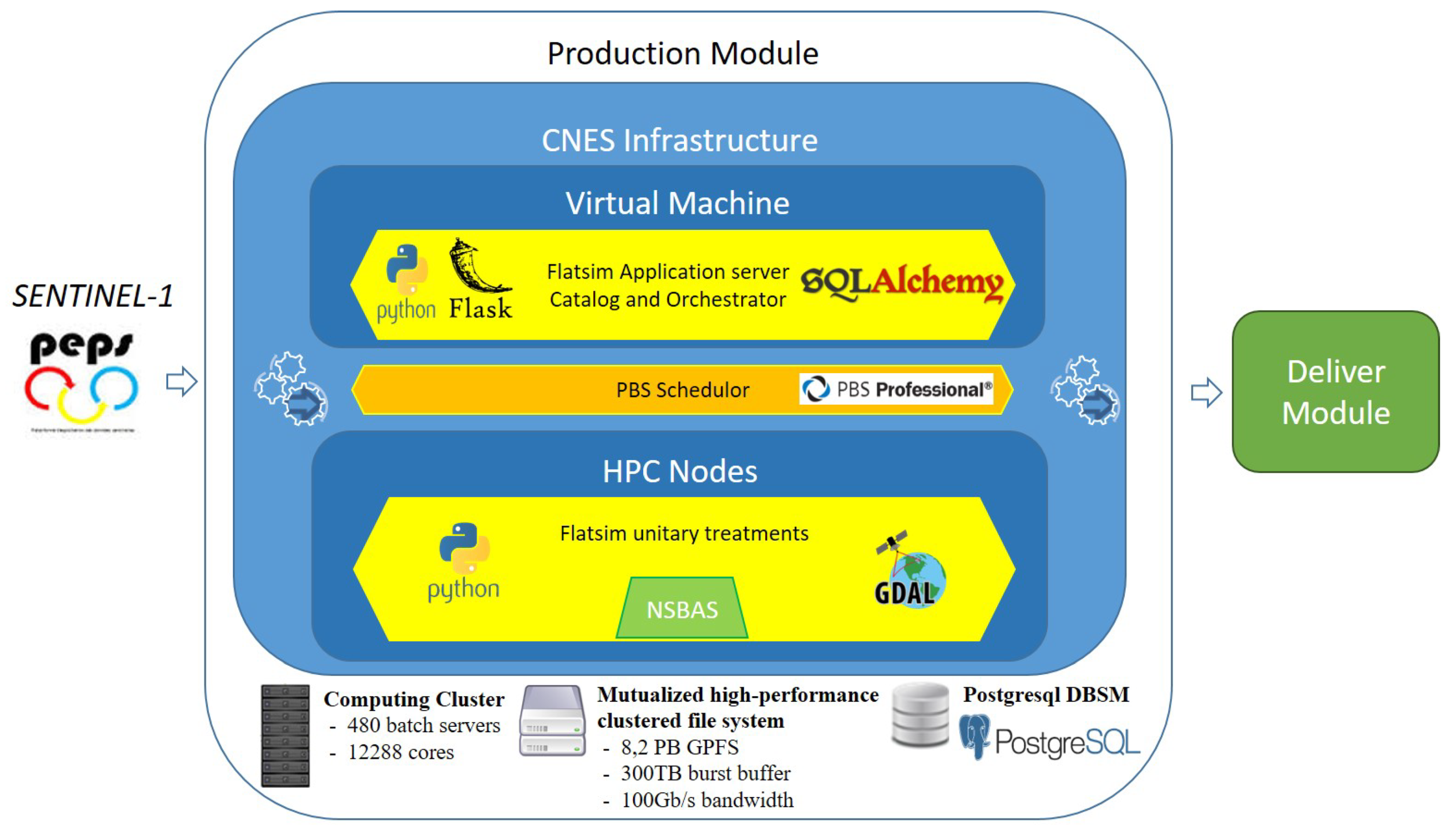
3.3. Architecture of the FLATSIM Production Module
- The FLATSIM application server which includes catalog and orchestrator capabilities;
- The FLATSIM unitary treatments that integrate NSBAS as a library and run as unitary jobs on nodes of the HPC center.
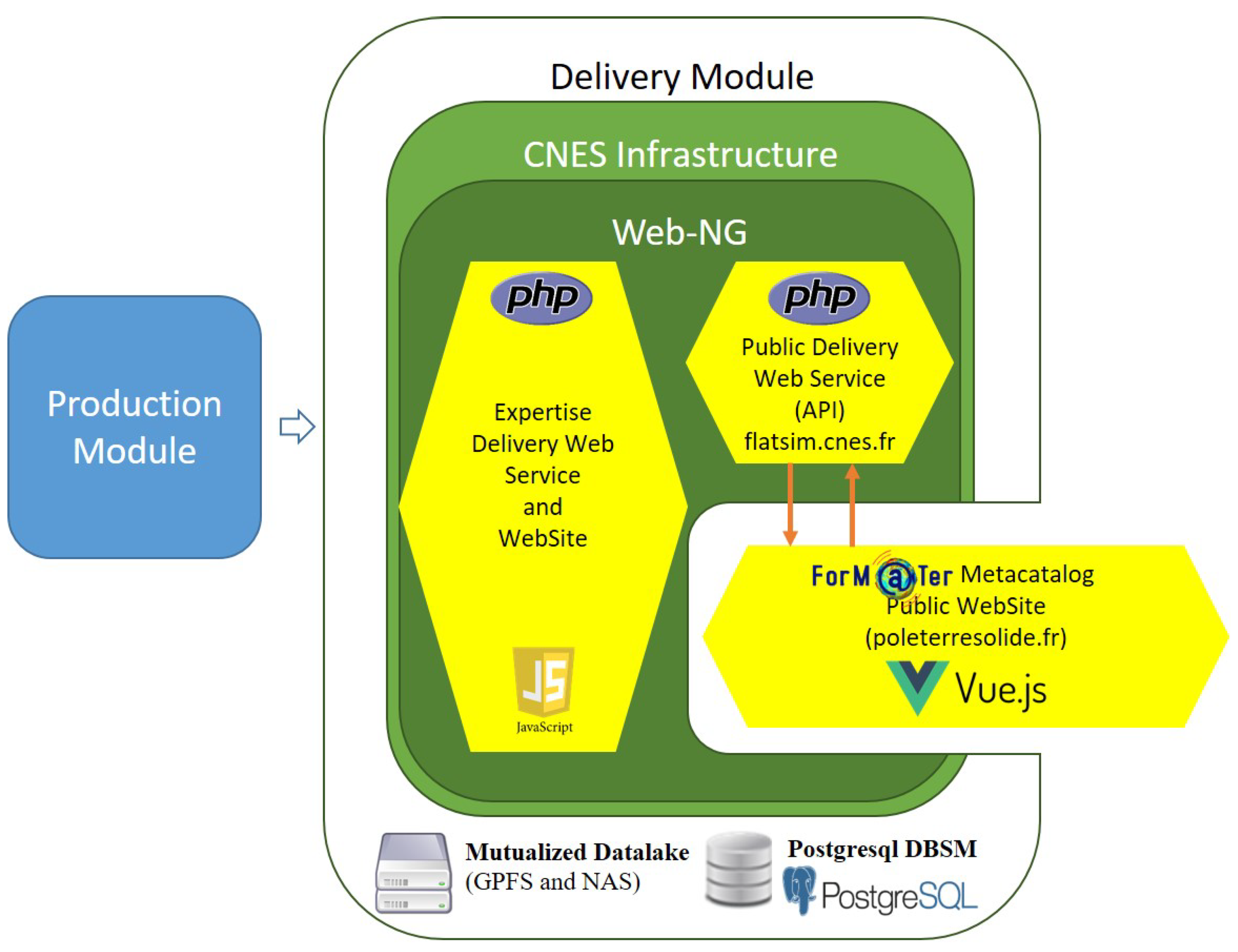
3.4. Architecture of the FLATSIM Delivery Module
- Downloadable products on the GPFS part of the datalake;
- Visualization data on the network attached storage (NAS) part of the datalake;
- Metadata in the PostgreSQL database.
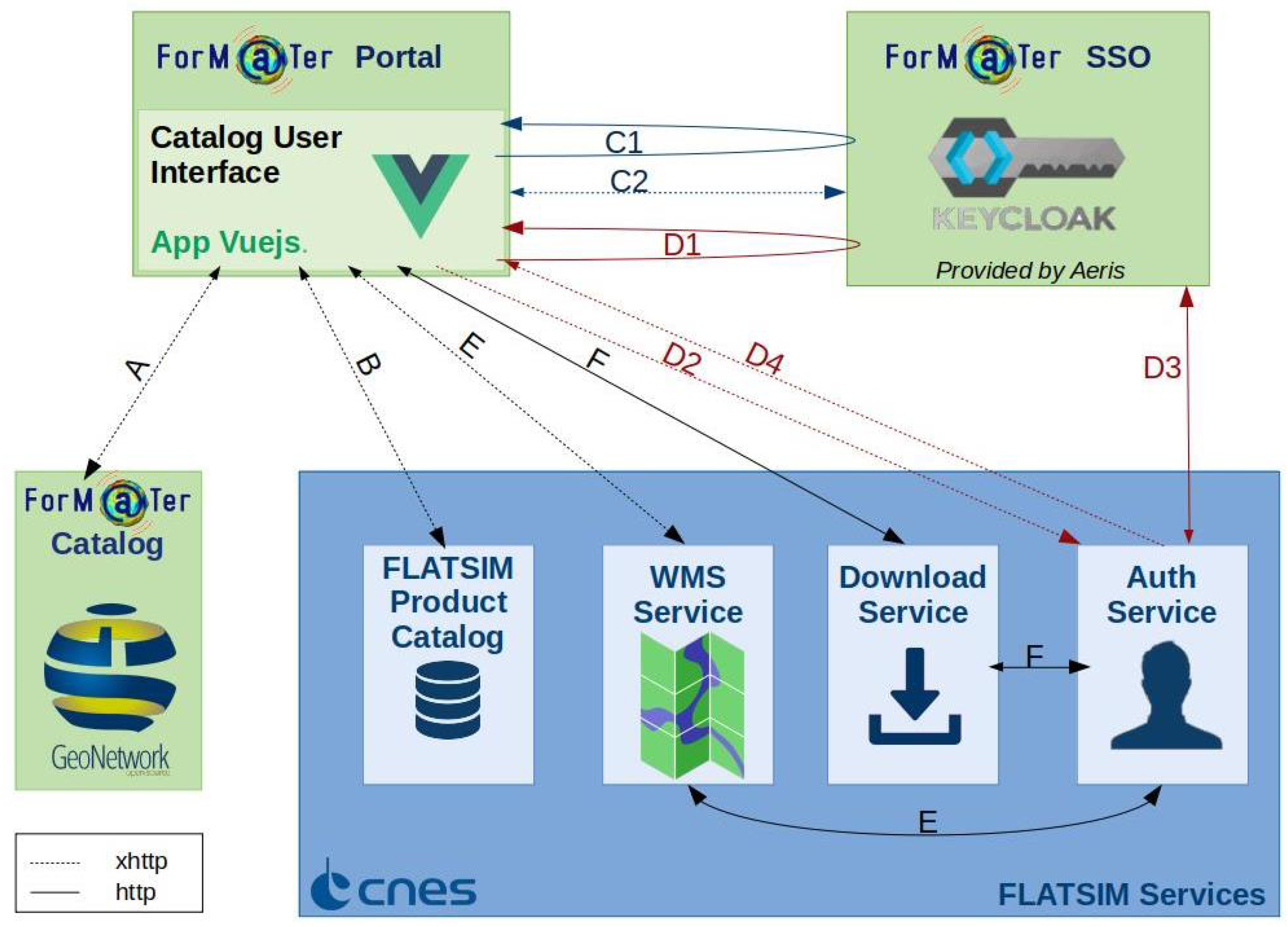
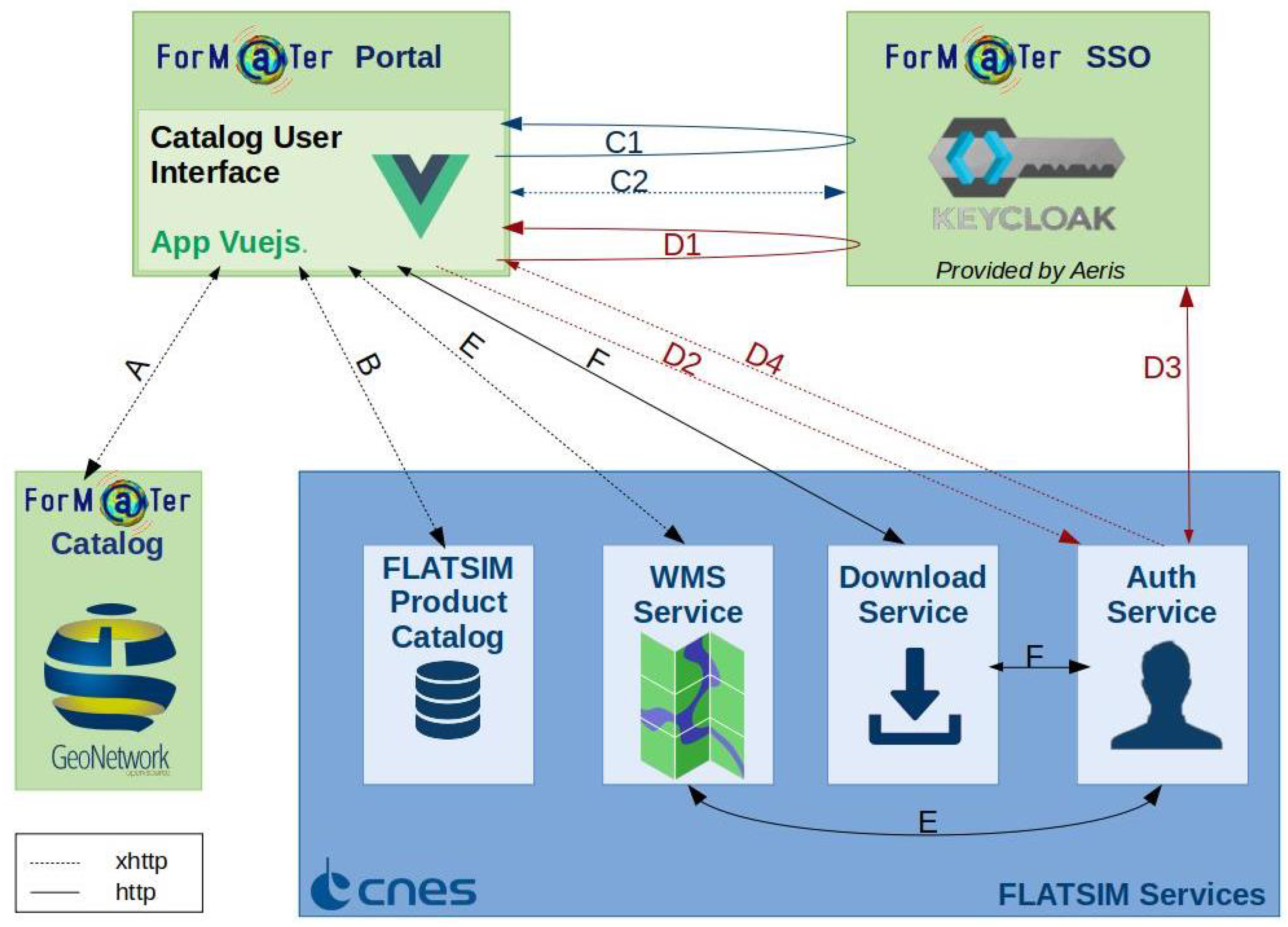
3.5. User Access Interface
- Request A: Geonetwork’s Q Search API is used for user searches among collections. These searches can be spatial, temporal, by data center, open term, variable, or platform. The requests are xhttp requests, invisible to the user;
- Request B: The meta-catalog‘s Opensearch API allows searches among the granules of a FLATSIM collection. The requests are xhttp requests, invisible to the user;
- Requests C1 and C2 (User authentication for the metacatalog):
- C1, the user authenticates with the Keycloack SSO and is redirected with a code to the meta-catalog page;
- C2, the Vuejs meta-catalog application queries the SSO with the code to obtain an access token and user information (invisible to the user),
- Requests D1 to D4 (Authentication with FLATSIM):
- D1, the user authorizes FLATSIM to access his user data and is redirected to the meta-catalog page with a code for FLATSIM authentication;
- D2, the meta-catalog application transmits the code to the FLATSIM authentication service (invisible to the user);
- D3, FLATSIM’s authentication service queries the SSO with the code, to get user data (invisible to the user);
- D4, the authentication service transmits a FLATSIM data access token to the meta-catalog application (invisible to the user);
- Request E: The user now has a FLATSIM access token, he can query the WMS Flatsim service by transmitting the token. The service checks that the token is valid with the FLATSIM authentication service and sends the images back (invisible to the user).
- Request F: The user now can request a download by transmitting the token. The service checks that the token is valid with the FLATSIM authentication service and then returns the archive (invisible to the user).
3.6. Service Access
4. Description of Products
4.1. General Description
| CNES_TYPE_GEOMETRY_[DATE1_DATE2]_LOOKSrlks.EXT |
- TYPE
- points toward the file type (i.e., wrapped interferograms, coherence, etc.). See hereafter for a more detailed description.
- GEOMETRY
- is set either to radar for radar geometry or geo for ground geometry.
- DATE1
- (DATE2, respectively). These optional fields corresponds to the date at which the first (second or last, respectively) image has been taken.
- LOOKS
- is the number of looks used to downsample the image (note there is a factor 4 between the number of range and azimuth looks, i.e., 2 looks means 8 looks in range and 2 looks in azimuth).
- EXT
- is the extension of the file that defines its type:
- tiff
- contains the data;
- png
- a preview file. It comes with a legend file, typically a colorbar with the scale information.
- meta
- a file that contains additional metadata. It contains for example information about the parameters of the processing chain, or about the product itself like its DOI, or about the satellite geometry, like the orbit direction, the relative orbit number, etc.
4.2. Packages of Interferogram Products
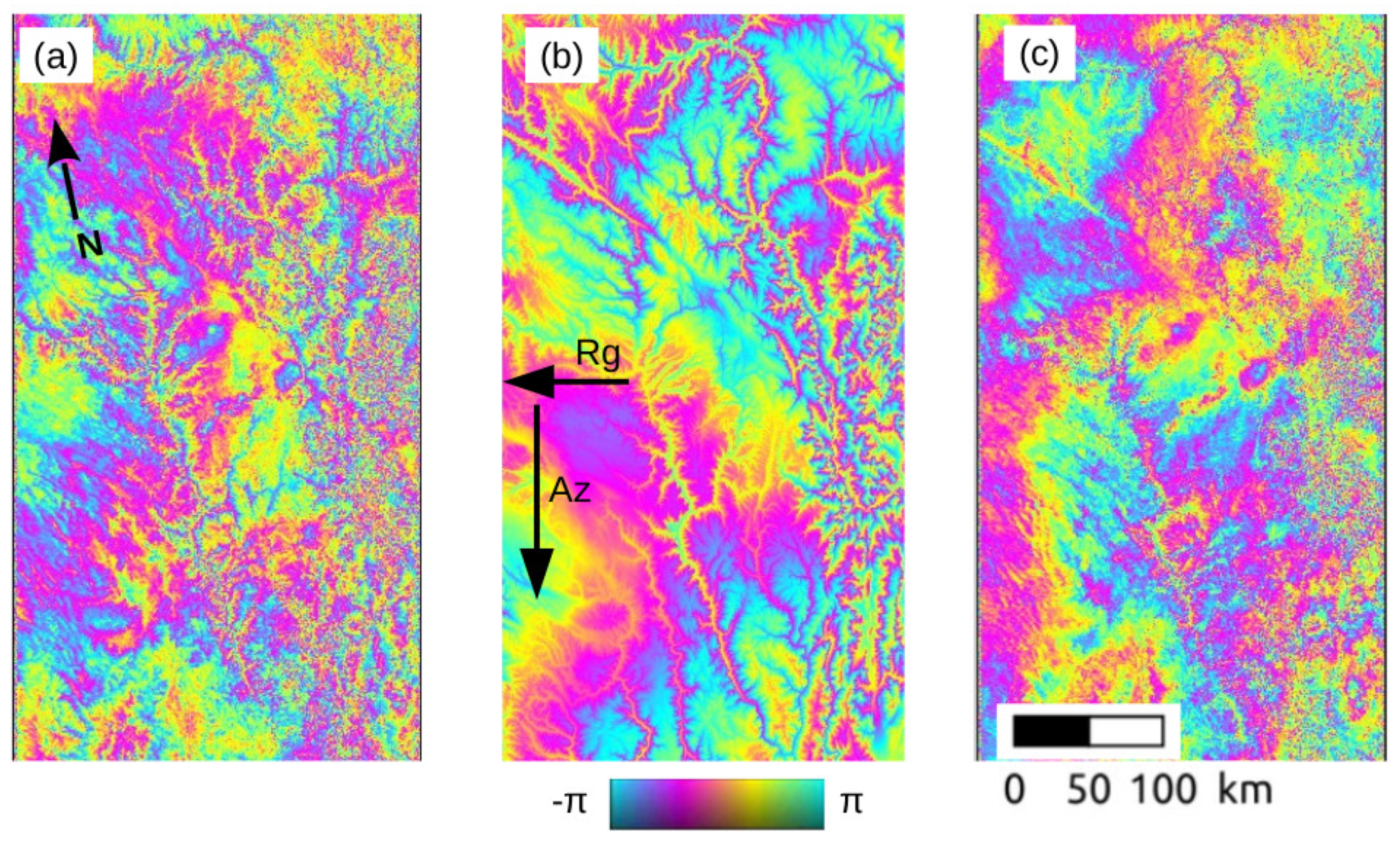
- Wrapped/Unwrapped InterferogramInW (InU, respectively) is the wrapped (unwrapped, respectively) merged interferogram. Wrapped interferograms in radar geometry are provided both in 2 and 8 (or 16) looks. The initial number of looks of the interferograms before they are geocoded is given in their names and metadata. The ground pixel spacing is chosen according to the initial pixel spacing in radar geometry. The InWF and InU products are spatially filtered. All interferograms have been corrected using spectral diversity and the ERA5 atmospheric model.
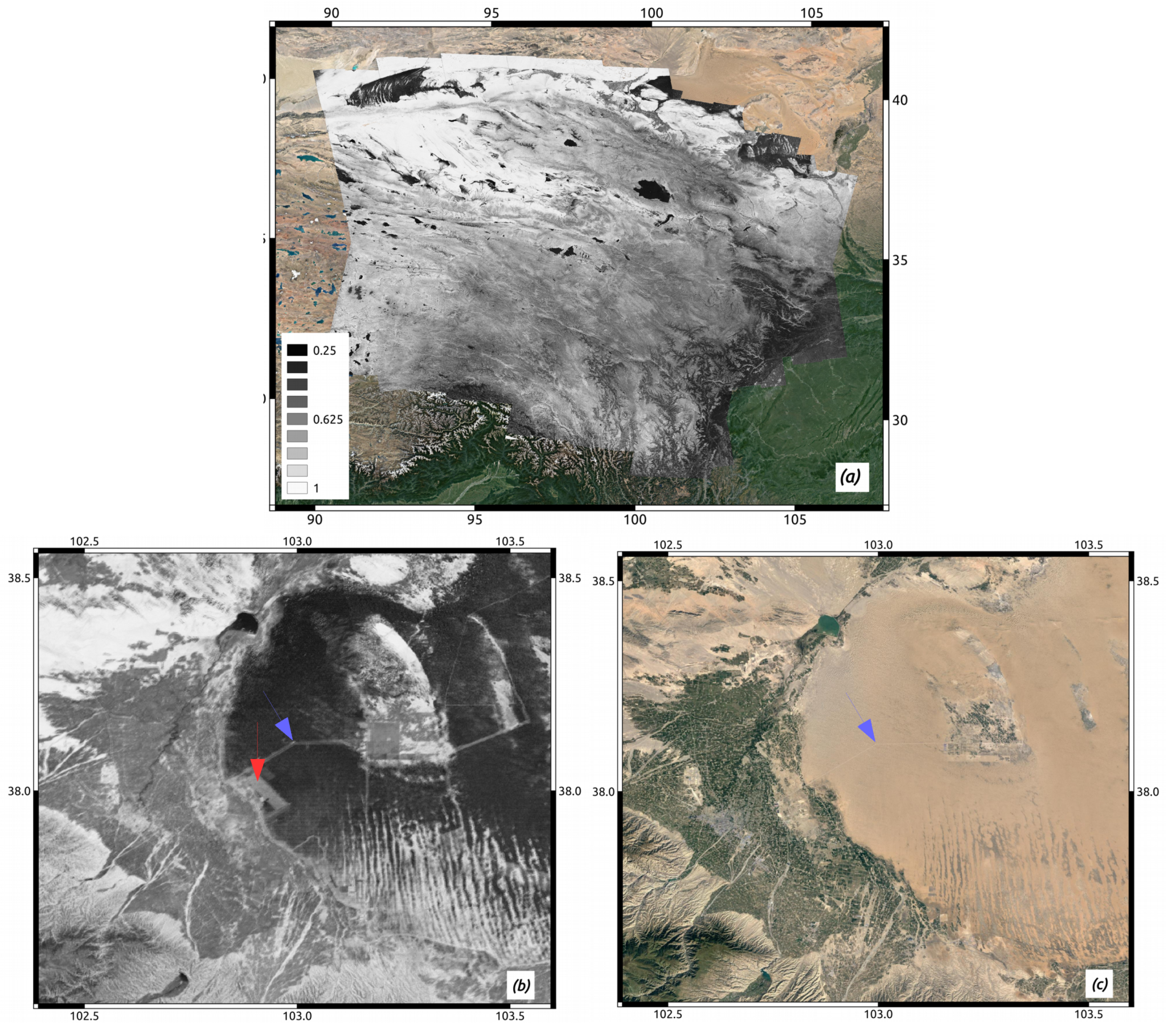
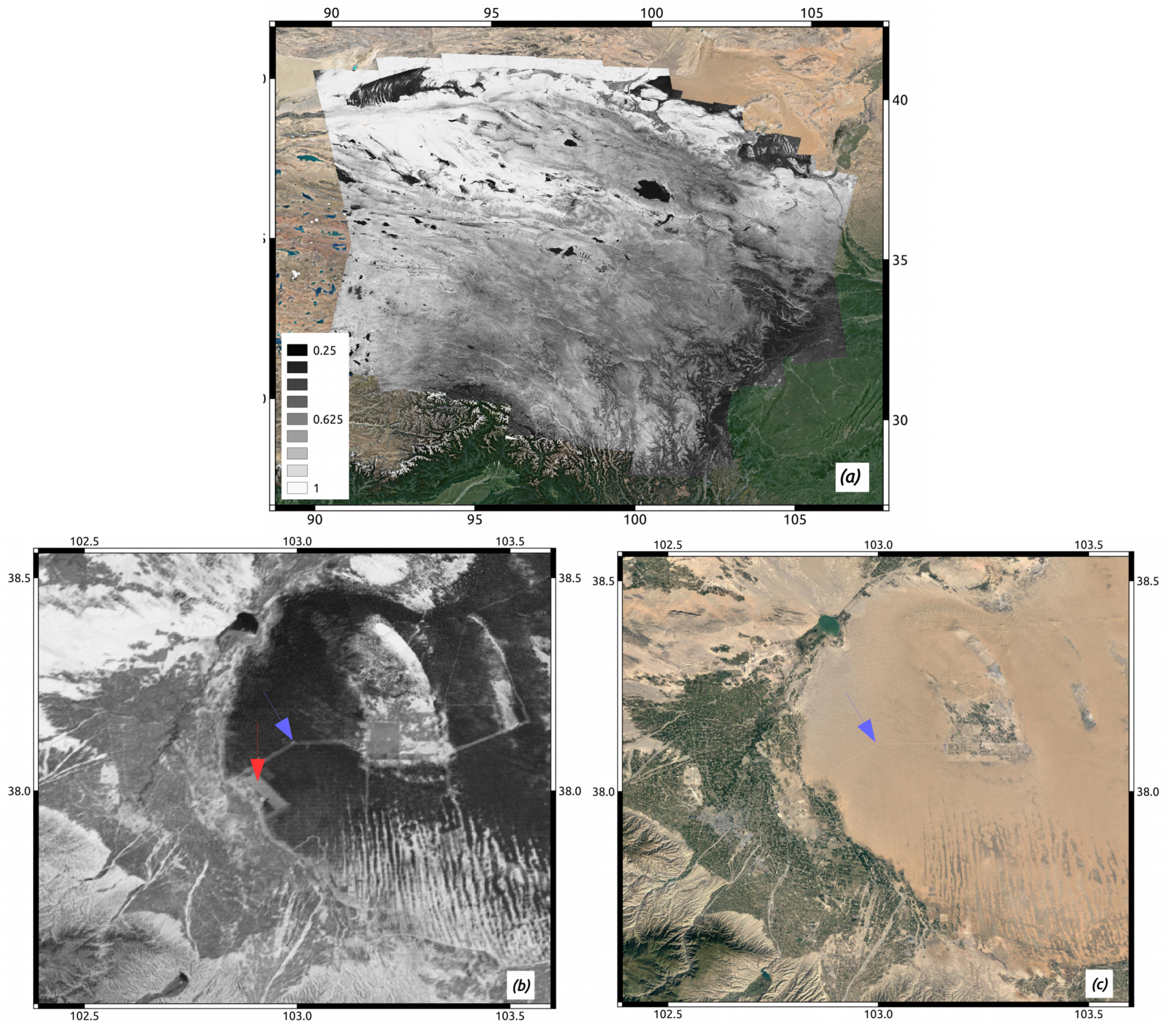
- Spatial coherenceCoh is the spatial coherence of the wrapped interferogram. It can thus be considered as a proxy of the quality and reliability of the signal. Typically, the spatial coherence will be very low (close to zero) at points located on water—e.g., sea, lakes, rivers, snow—and close to one at locations with stable backscattering properties where there is no vegetation—e.g., deserts, rocky mountains without snow, roads, buildings, etc.
- Atmospheric phase screen
4.3. Time-Series Package
- DTs: time-seriesThis product is a data cube that contains the cumulated total phase delay images at each acquisition with respect to the first date. In practice, the reference is set to the origin of a linear fit through the time series for each pixel. This representation avoids for the APS of the first image to appear in negative on all other dates. Note, however, that it is not ideal in case of strongly non-linear deformation. The time series may be incomplete for some pixels and for some dates, and values are then replaced by NaN. We choose to deliver the total phase delay, that includes both residual atmospheric phase screens and displacement signals, without any attempt by us to separate both contributions. This allows the user to perform its own separation, possibly guided by his knowledge of the expected deformation signal properties.The geotiff file includes as many bands as time steps. The unit is in radians along LOS, positive away from satellite. Each band is named by the acquisition date. The associated preview file displays the cumulated displacement at the last time step.
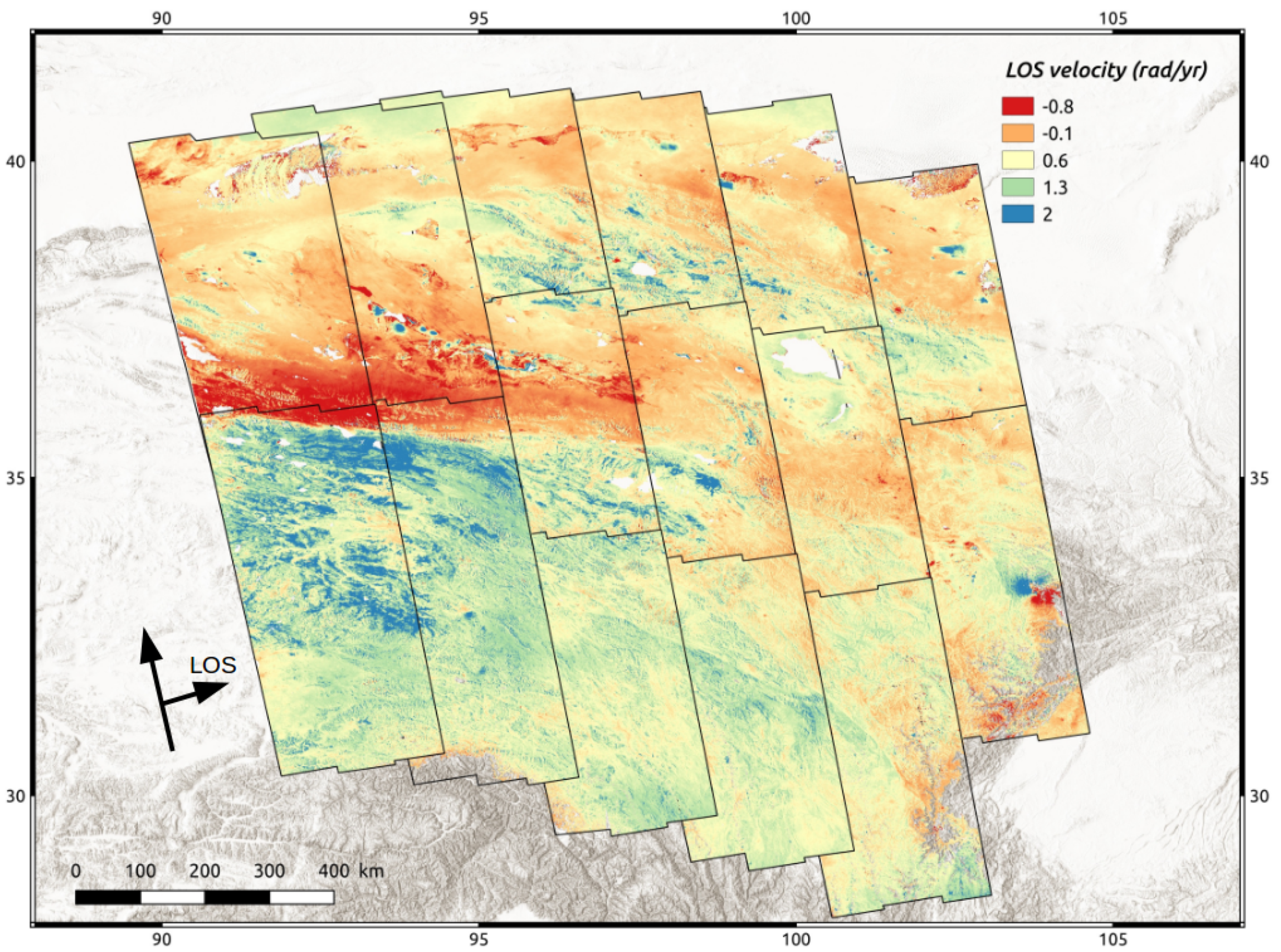
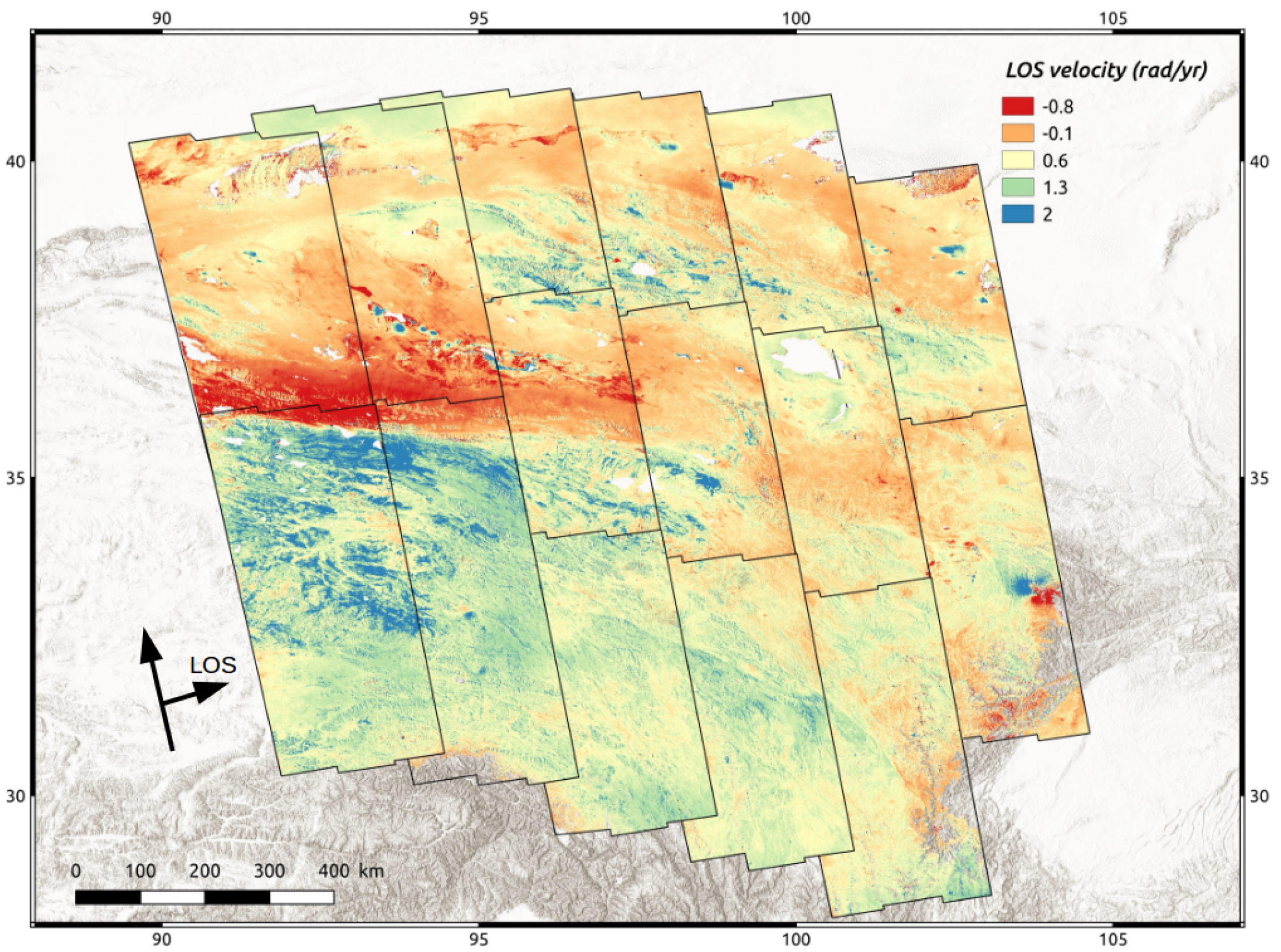
- MV-LOS: LOS velocityThe mean LOS velocity is given in a geotiff product with two bands:
- –
- Band 1 is the mean velocity in rad/yr, positive away from satellite;
- –
- Band 2 is a shaded view of the topography, with an illumination simulated to match the radar backscatter amplitude.
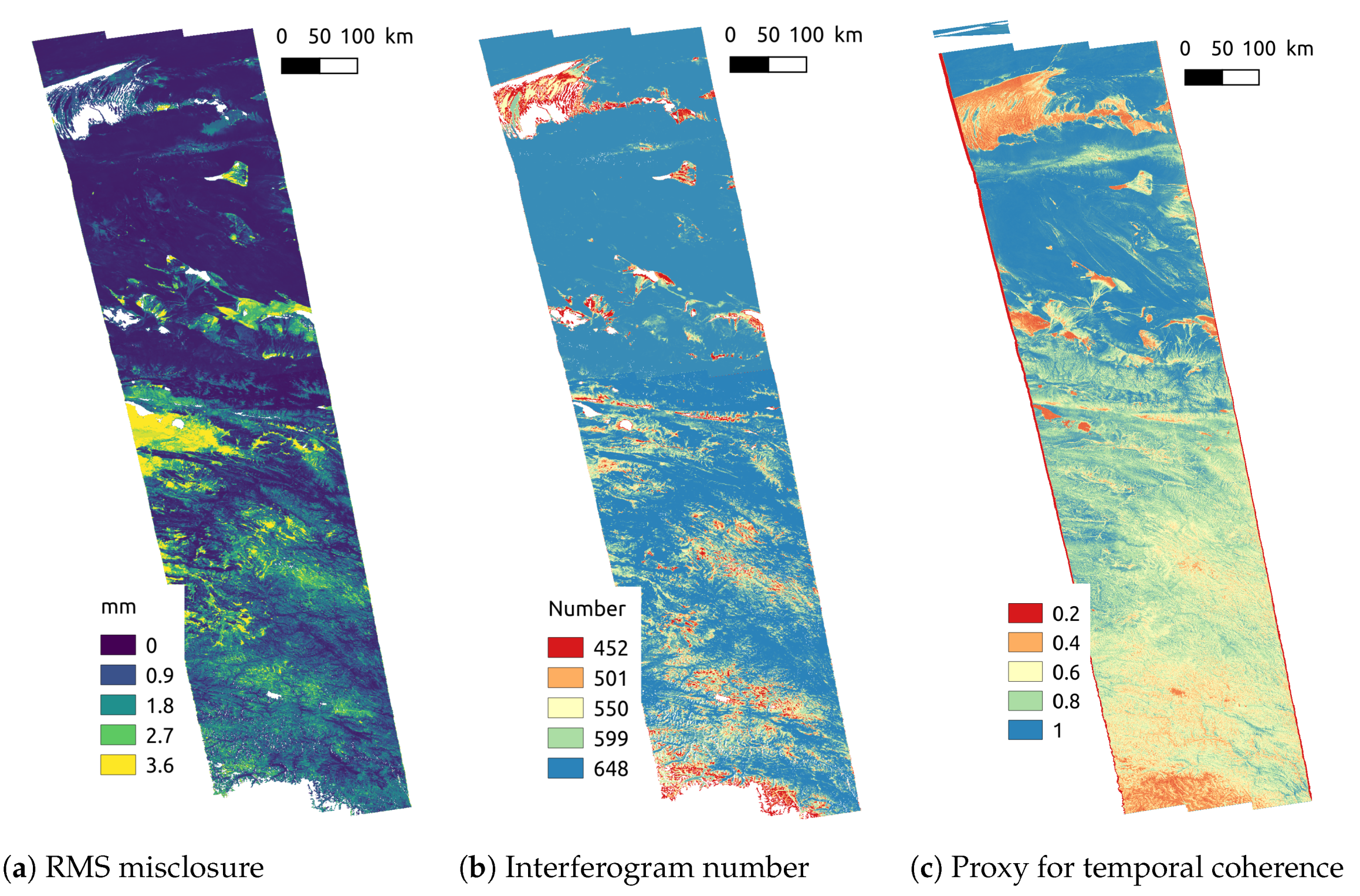
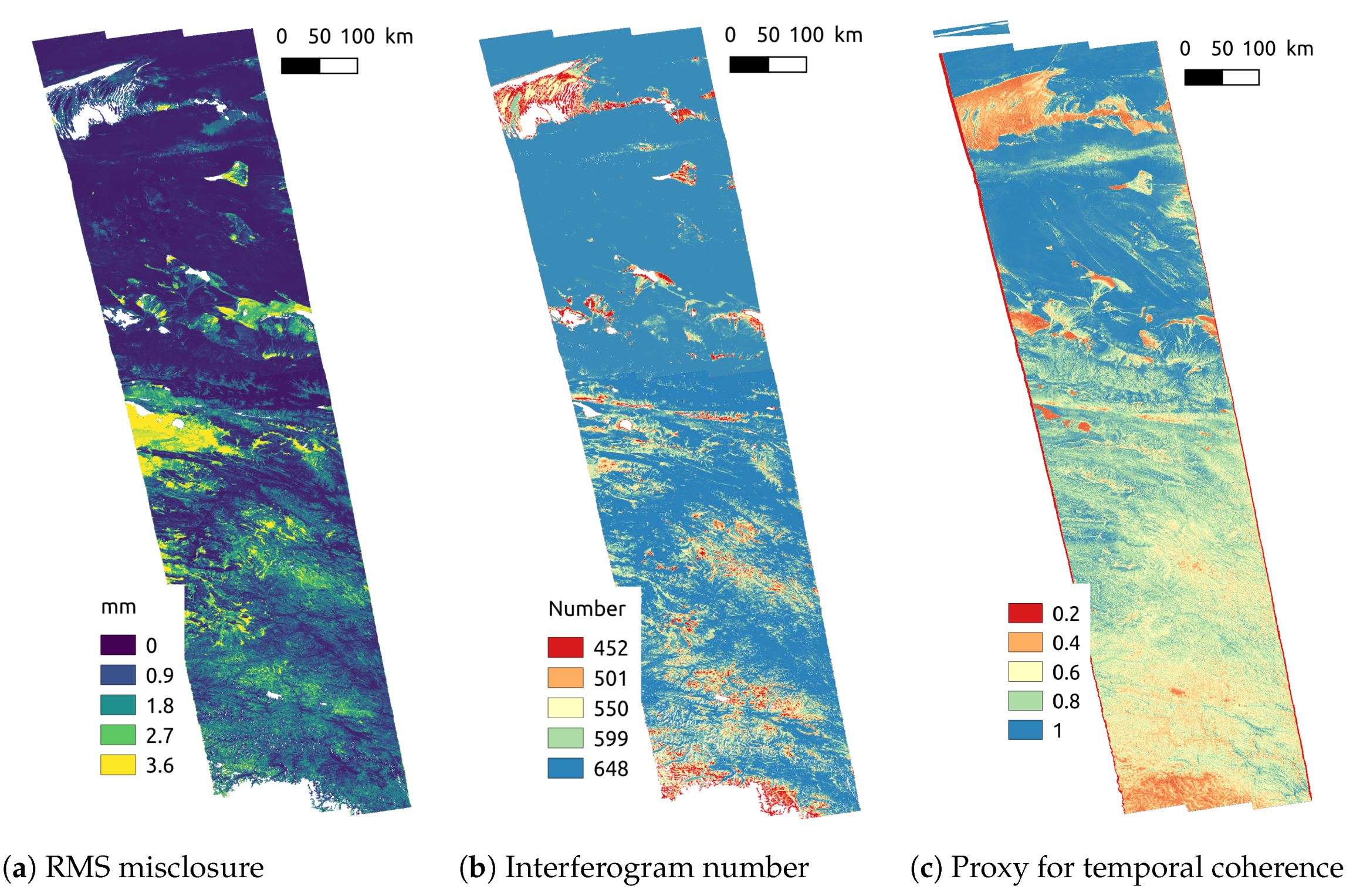
- Net: Quality assessment productThis geotiff product gives various indicators of the quality of the time series inversion, provided in radar and in ground geometry.
- –
- Band 1: RMS misclosure of the interferogram network for each pixel, in rad;
- –
- Band 2: Number of interferograms used in the time series inversion for each pixel;
- –
- Band 3: Number of images used in the time series inversion for each pixel;
- –
- Band 4: Proxy for the temporal coherence, computed as the norm of the average of all successive interferometric triplets (between 0 and 1);
- –
- Band 5: Proxy for a possible bias in the timeseries, computed as the argument of the average of all successive interferometric triplets (in rad).
- Stk-In: interferogram list productIt gives information on the timeseries, as for example the list of dates and interferograms used as input to the time serie inversion and the reference image that was selected.
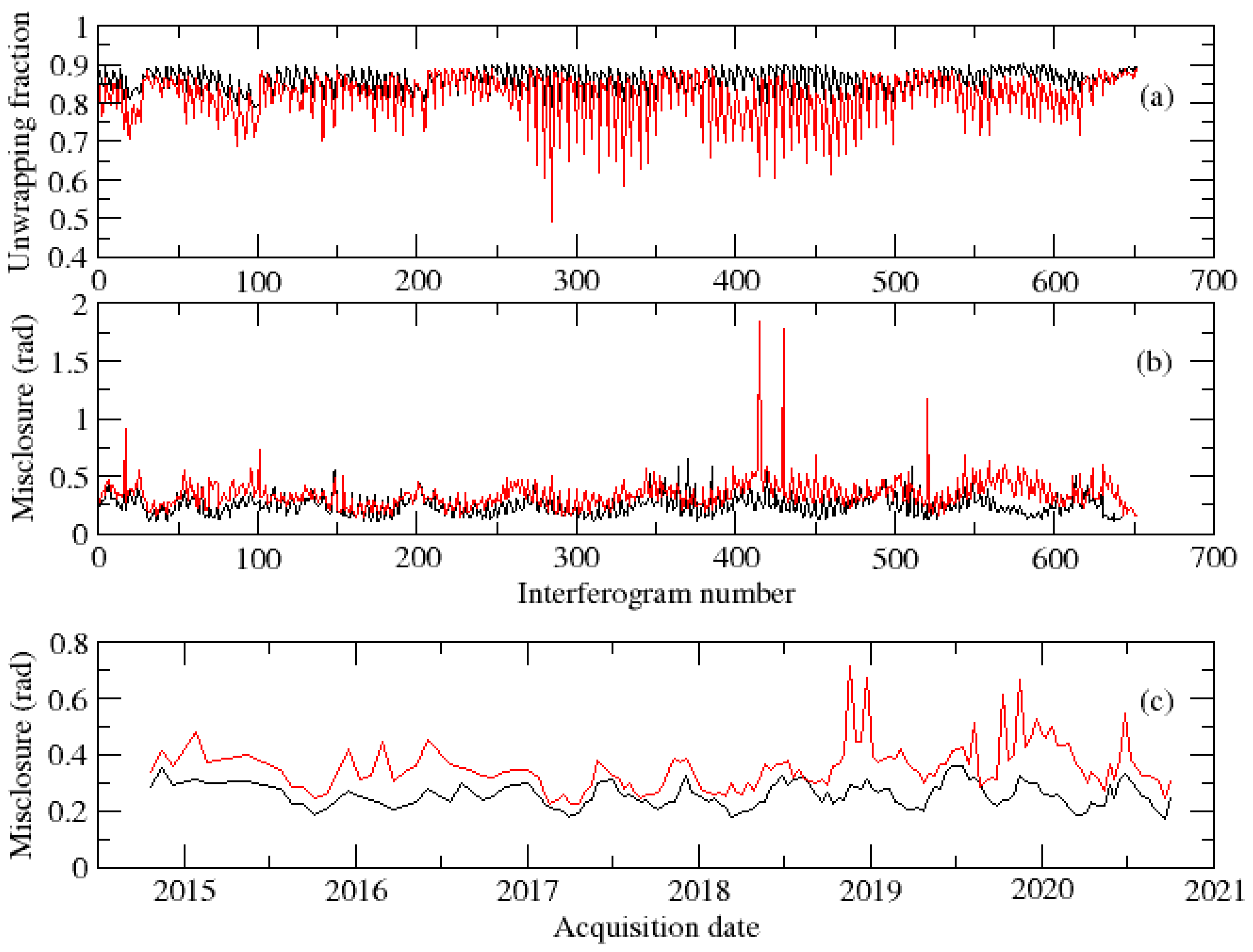
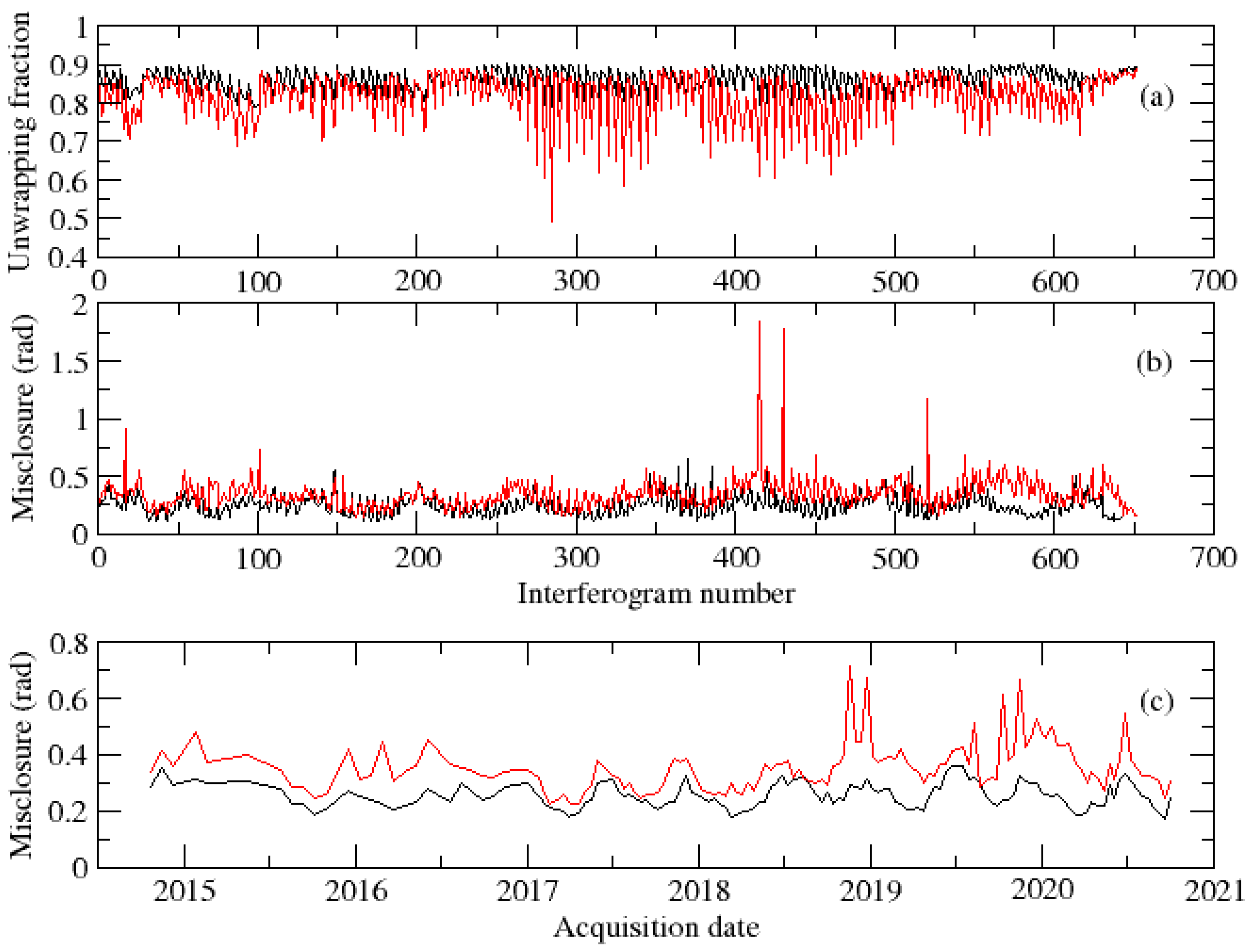
- Additional txt filesThe “RMSinterfero.txt” and “RMSdate.txt” files, together with their png previews, are very useful to check possible problems on interferograms or on acquisitions. They provide the RMS interferometric network misclosure averaged either by interferogram or by date. For example, the RMS value for some interferograms will be large in case of uncorrected unwrapping errors. Specific errors associated with one image, for example in case of snow, strong atmospheric or ionospheric perturbations, or bad azimuth frequency modulation corrections, can also be detected.
4.4. Auxiliary Data Package
- CosENU: LOS unit vectorThe three-bands geotiff product in either radar or ground geometry gives the LOS unit vector , along the satellite to ground direction, such that the LOS velocity, , can be related to the ground velocity vector, , by
- LuT: Look-up tablesThe provided LuT tables allows to project 2-looks or 8-looks products in radar geometry in ground geometry and inversely.
- TCoh: Radar backscatter propertiesThis product assembles at about 40 m × 40 m resolution backscatter properties averaged over the complete data stack. It includes (1) the averaged SLC amplitude, (2) the amplitude dispersion index (, (3) the norm of the complex average of all successive interferogram triplets, (4) the argument of the complex average of all successive interferogram triplets.
- Auxiliary text filesNumerous text files are added in the package for users wanting to verify some crucial processing steps. They include perpendicular baseline information, parameters for enhanced spectral diversity corrections for each sub-swath, interferogram unwrapping fractions, and interferogram phase standard deviations.
5. Results and Products Qualification
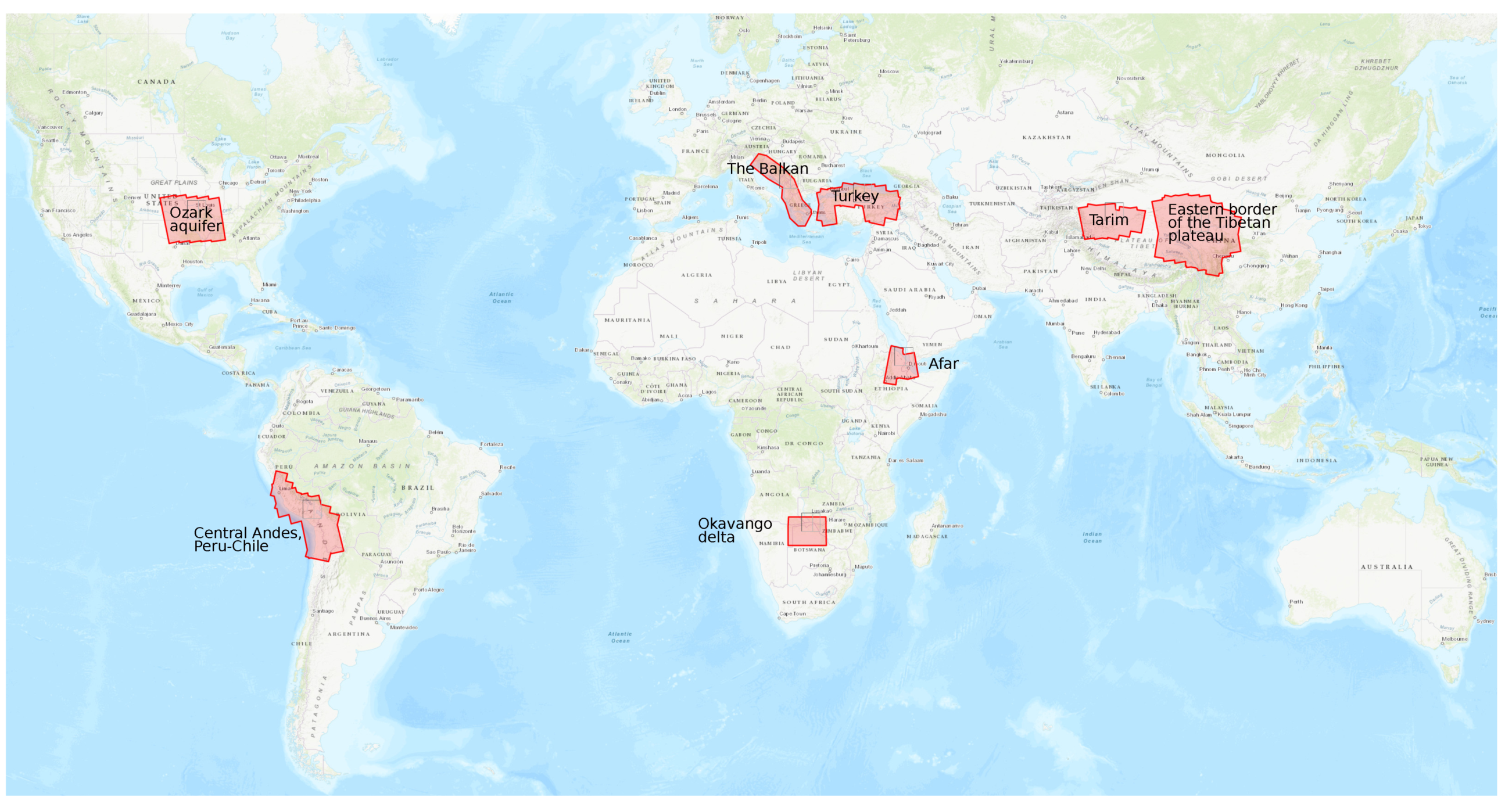
5.1. First Processed Areas
- The Ozark aquifer project covers a region located in North America. It focuses on the study of the deformations associated with the Ozark aquifer (south of the Mississippi basin), subject to strong variations in groundwater level, and in neighboring regions where significant seismicity is observed, with a strong seasonal component (New Madrid), or related to wastewater injections (Oklahoma). The objective is to better understand the geodetic signature of the hydrological cycle;
- The Central Andes, Peru–Chile project aims at (1) better understanding the seismic cycle of the Andean subduction zone in Peru and Chile and of the crustal faults in the Andes, (2) monitoring the dynamics of the large active volcanoes in the region (and to detect possible precursors to eruptions), and (3) at studying the seismic, climatic, and anthropogenic forcing on the dynamics of landslides in the Andes;
- The Balkan region is one of the most seismically active zones in Europe, with intense industrial and demographic development. The purpose of the project is to better quantify the deformations of tectonic origin in this region (kinematics and localization of active faults, study of earthquakes). It also aims at quantifying the deformations of anthropogenic or climatic origin (linked to the exploitation of natural ressources or to variations in sea level);
- Turkey: The objective of this project is to characterize the seismic and aseismic behavior of the North Anatolian and East Anatolian faults, in order to better assess their seismic hazard and understand the physical processes governing the dynamics of a fault. It also includes the monitoring of deformations in the grabens of western Turkey, which are major geological structures with high seismic potential;
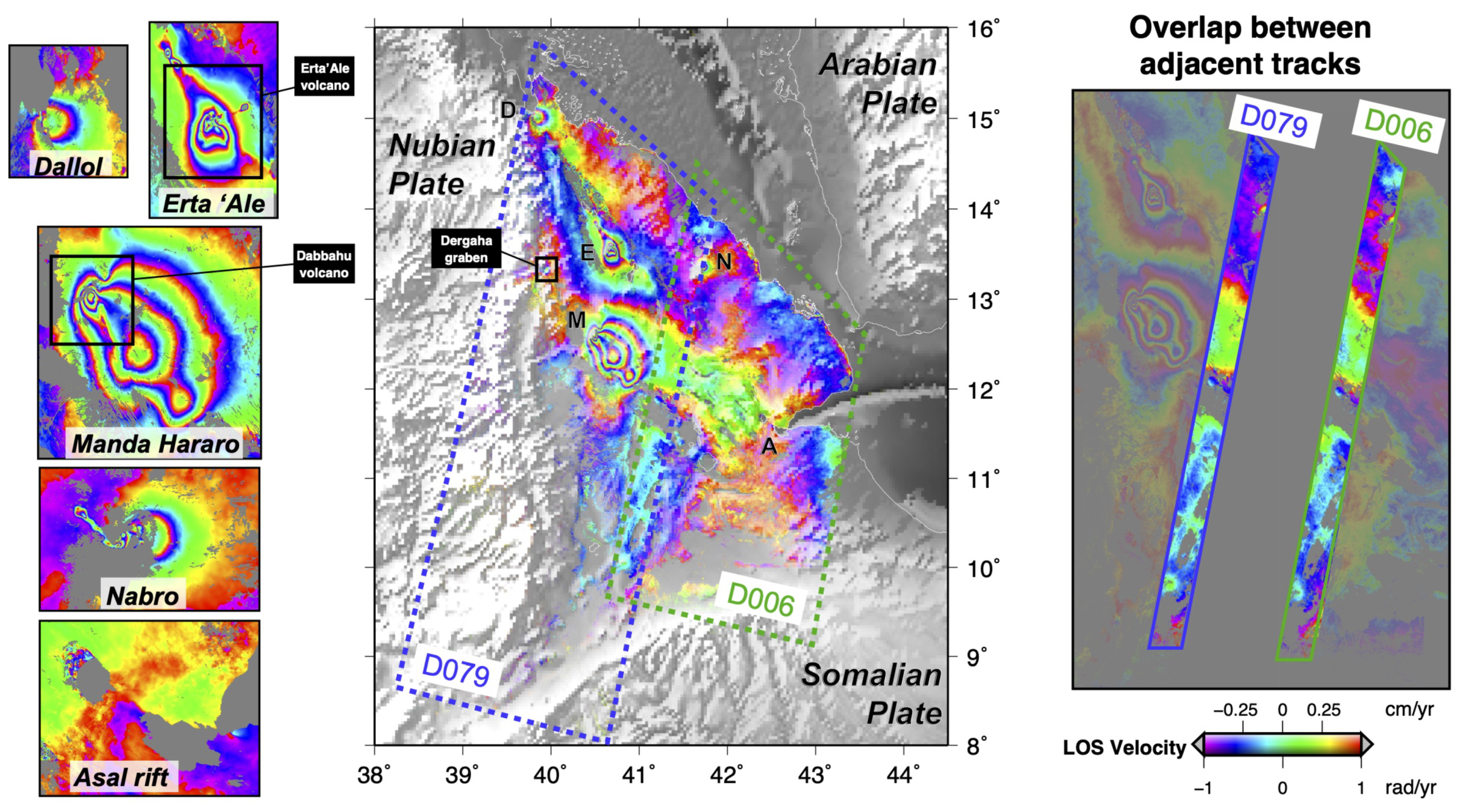
- The Afar project aims at characterizing the spatial and temporal distribution of the deformation in the region of the Afar depression. The purpose is to better understand the large-scale tectonics (localization of divergent borders, kinematics of the triple point), but also the dynamics of volcanic, seismic, and aseismic events, and the mechanics of active faults. The issue of landslides hazard will also be addressed;
- Okavango delta: This project aims at better understanding the deformations of tectonic origin in the area of the Okavango Delta (associated with the functioning of the Okavango rift and the East African rift), or of hydrological origin (linked in particular to the flood cycle), and the possible interactions between tectonics and hydrology in this region;
- The Tarim project focuses on the analysis of tectonic deformations along the Western Kunlun Range, on the northwestern edge of the Tibetan Plateau. This region is marked by the interaction between large strike-slip and thrust faults, with in particular the existence of one of the largest thrust sheet in the world, whose interseismic loading and capability to produce “mega-earthquakes” will be investigated;
- Eastern border of the Tibetan plateau: The objective of the project is to quantify and model the current deformations on the eastern edge of the Tibetan plateau. It focuses on deformations of tectonic origin, at the scale of active faults, as well as at the continental scale, to address issues of the seismic cycle and uplift mechanisms of the Tibetan plateau. This project is also interested in monitoring non-tectonic signals present in the time series (hydrological overloads in particular).
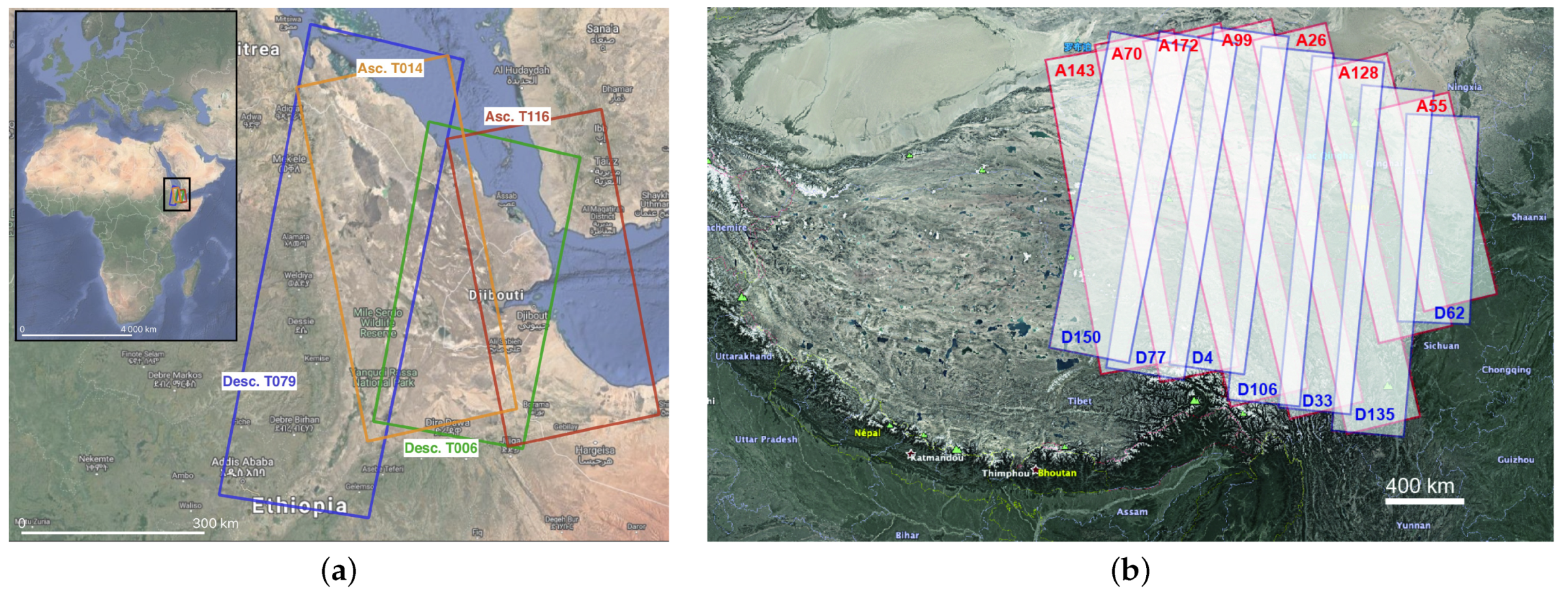
5.2. Result Discussion in Tibet Area
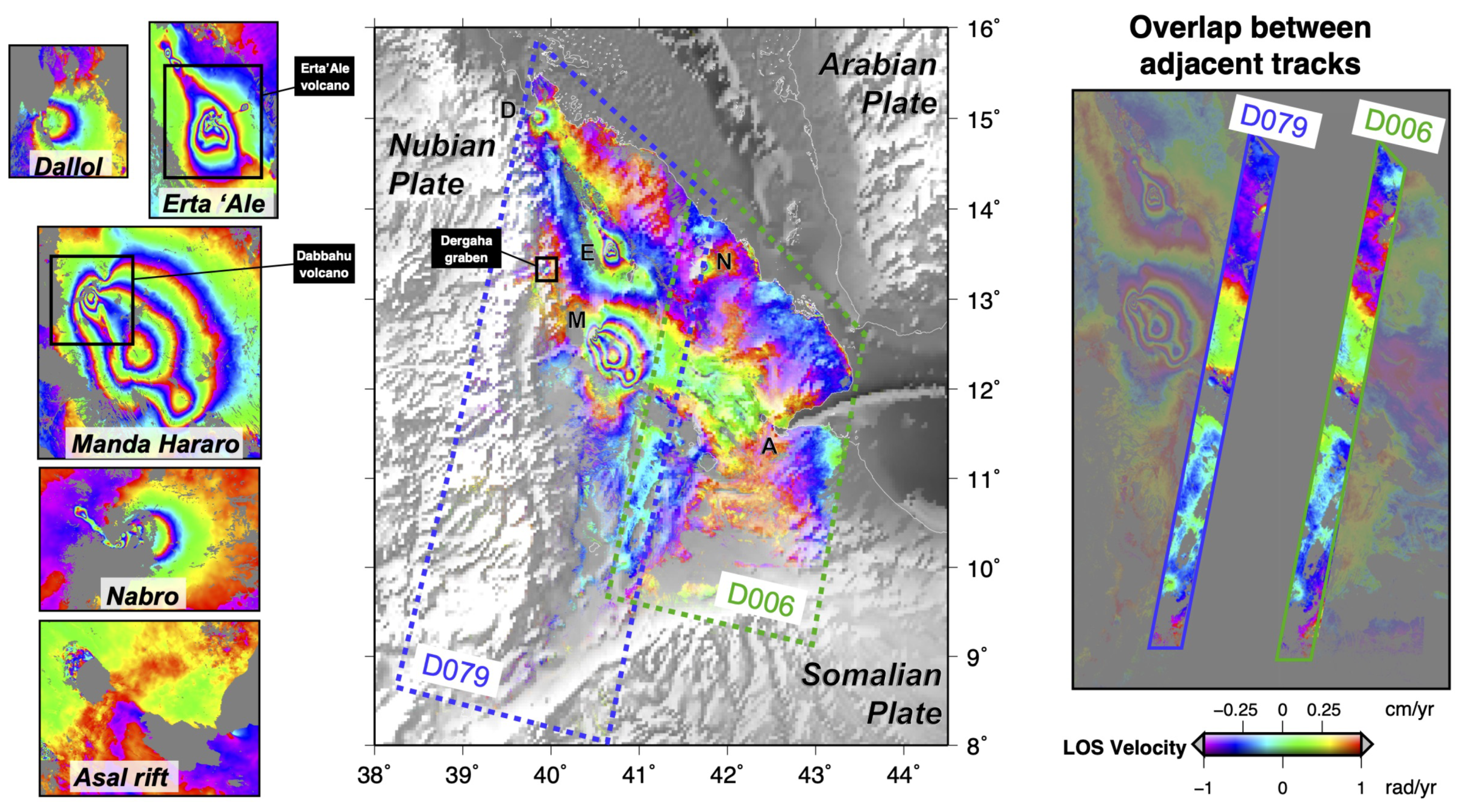
5.3. Discussion of Results in the Afar Area
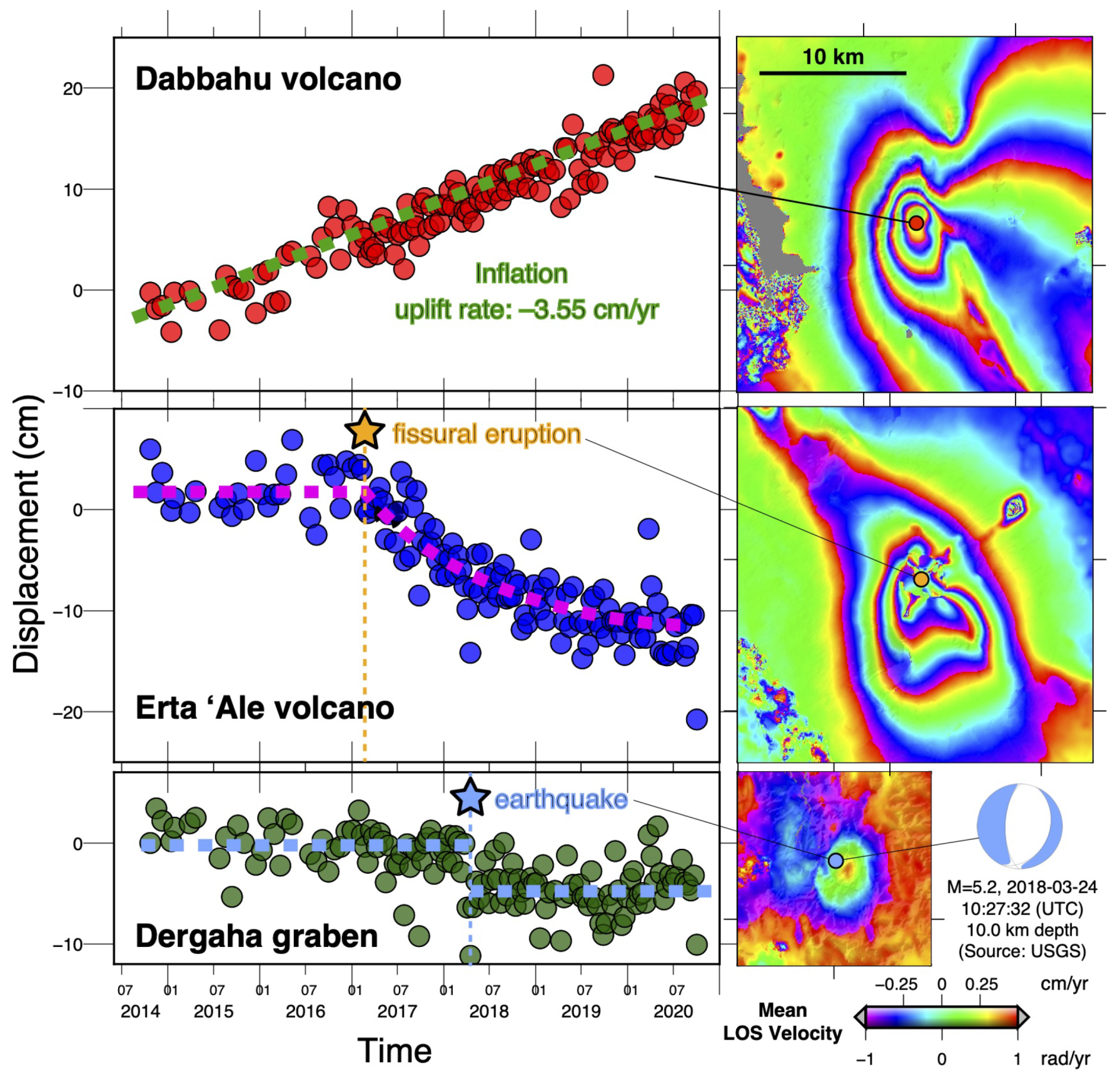
- Following a major rifting episode that took place between 2005 and 2011 [55], the Dabbahu volcano (located North West of Manda Hararo in Figure 18) has experienced a steady re-inflation, inducing uplift at a rate of ≈3.5 cm/yr. The inflation is remarkably constant between 2014 and 2021, confirming the findings of [56];
- In contrast, the volcano Erta ’Ale has shown a transient deflation that started in January 2017 following a lava lake overflow event, that produced long-lived lava flows [57];
- Finally, a very small signal is detected in the Dergaha graben, coinciding with a cluster of seismicity detected in 2008 [58]. The time-series shows a clear step around March 2018, which corresponds well with the time of occurrence of the largest event of the seismic sequence.
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gabriel, A.; Goldstein, R.M.; Zebker, H. Mapping small elevation changes over large areas: Differential radar interferometry. J. Geophys. Res. 1989, 94, 9183–9191. [Google Scholar] [CrossRef]
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The displacement field of the Landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Peltzer, G.; Rosen, P. Surface Displacements of the 17 May 1993 Eureka Valley, California, Earthquake Observed by SAR Interferometry. Science 1995, 268, 1333–1336. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Schmidt, D.A.; Bürgmann, R. Time-dependent land uplift and subsidence in the Santa Clara valley, California, from a large interferometric synthetic aperture radar data set. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Peltzer, G.; Crampé, F.; Hensley, S.; Rosen, P. Transient strain accumulation and fault interaction in the Eastern California shear zone. Geology 2001, 29, 975–978. [Google Scholar] [CrossRef]
- Wright, T.; Parsons, B.; Fielding, E. Measurement of interseismic strain accumulation across the North Anatolian Fault by satellite radar interferometry. Geophys. Res. Lett. 2001, 28, 2117–2120. [Google Scholar] [CrossRef]
- Doubre, C.; Peltzer, G. Fluid-controlled faulting process in the Asal Rift, Djibouti, from 8-year radar interferometry observations. Geology 2007, 35, 69–72. [Google Scholar] [CrossRef]
- Jolivet, R.; Lasserre, C.; Doin, M.P.; Peltzer, G.; Avouac, J.P.; Sun, J.; Dailu, R. Spatio-temporal evolution of aseismic slip along the Haiyuan fault, China: Implications for fault frictional properties. Earth Planet. Sci. Lett. 2013, 377–378, 23–33. [Google Scholar] [CrossRef]
- Bacques, G.; de Michele, M.; Raucoules, D.; Aochi, H.; Rolandone, F. Shallow deformation of the San Andreas fault 5 years following the 2004 Parkfield earthquake (Mw6) combining ERS2 and Envisat InSAR. Sci. Rep. 2018, 8, 6032. [Google Scholar] [CrossRef]
- Aslan, G.; Lasserre, C.; Cakir, Z.; Ergintav, S.; Ozarpaci, S.; Dogan, U.; Bilham, R.; Renard, F. Shallow Creep Along the 1999 Izmit Earthquake Rupture (Turkey) From GPS and High Temporal Resolution Interferometric Synthetic Aperture Radar Data (2011-2017). J. Geophys. Res. Solid Earth 2019, 124, 2218–2236. [Google Scholar] [CrossRef]
- Maubant, L.; Pathier, E.; Daout, S.; Radiguet, M.; Doin, M.P.; Kazachkina, E.; Kostoglodov, V.; Cotte, N.; Walpersdorf, A. Independent Component Analysis and Parametric Approach for Source Separation in InSAR Time Series at Regional Scale: Application to the 2017–2018 Slow Slip Event in Guerrero (Mexico). J. Geophys. Res. Solid Earth 2020, 125. [Google Scholar] [CrossRef]
- Daout, S.; Doin, M.P.; Peltzer, G.; Socquet, A.; Lasserre, C. Large-scale InSAR monitoring of permafrost freeze-thaw cycles on the Tibetan Plateau. Geophys. Res. Lett. 2017, 44, 901–909. [Google Scholar] [CrossRef]
- Solaro, G.; Acocella, V.; Pepe, S.; Ruch, J.; Neri, M.; Sansosti, E. Anatomy of an unstable volcano from InSAR: Multiple processes affecting flank instability at Mt. Etna, 1994–2008. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef]
- Chen, Y.; Remy, D.; Froger, J.L.; Peltier, A.; Villeneuve, N.; Darrozes, J.; Perfettini, H.; Bonvalot, S. Long-term ground displacement observations using InSAR and GNSS at Piton de la Fournaise volcano between 2009 and 2014. Remote Sens. Environ. 2017, 194, 230–247. [Google Scholar] [CrossRef]
- Cavalié, O.; Doin, M.P.; Lasserre, C.; Briole, P. Ground motion measurement in the Lake Mead area, Nevada, by differential synthetic aperture radar interferometry time series analysis: Probing the lithosphere rheological structure. J. Geophys. Res. Solid Earth 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Doin, M.P.; Twardzik, C.; Ducret, G.; Lasserre, C.; Guillaso, S.; Jianbao, S. InSAR measurement of the deformation around Siling Co Lake: Inferences on the lower crust viscosity in central Tibet. J. Geophys. Res. Solid Earth 2015, 120, 5290–5310. [Google Scholar] [CrossRef]
- Pousse Beltran, L.; Pathier, E.; Jouanne, F.; Vassallo, R.; Reinoza, C.; Audemard, F.; Doin, M.P.; Volat, M. Spatial and temporal variations in creep rate along the El Pilar fault at the Caribbean-South American plate boundary (Venezuela), from InSAR. J. Geophys. Res. Solid Earth 2016, 121, 8276–8296. [Google Scholar] [CrossRef]
- Wang, H.; Wright, T.J. Satellite geodetic imaging reveals internal deformation of western Tibet. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef] [Green Version]
- Daout, S.; Doin, M.P.; Peltzer, G.; Lasserre, C.; Socquet, A.; Volat, M.; Sudhaus, H. Strain Partitioning and Present-Day Fault Kinematics in NW Tibet From Envisat SAR Interferometry. J. Geophys. Res. Solid Earth 2018, 123, 2462–2483. [Google Scholar] [CrossRef]
- Weiss, J.R.; Walters, R.J.; Morishita, Y.; Wright, T.J.; Lazecky, M.; Wang, H.; Hussain, E.; Hooper, A.J.; Elliott, J.R.; Rollins, C. High-Resolution Surface Velocities and Strain for Anatolia From Sentinel-1 InSAR and GNSS Data. Geophys. Res. Lett. 2020, 47, 87376. [Google Scholar] [CrossRef]
- De Zan, F.; Monti Guarnieri, A. TOPSAR: Terrain Observation by Progressive Scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- SNAP-ESA Sentinel Application Platform v2.0.2. Available online: http://step.esa.int (accessed on 10 September 2021).
- Rosen, P.A.; Gurrola, E.; Sacco, G.F.; Zebker, H. The InSAR scientific computing environment. In Proceedings of the EUSAR 2012 9th European Conference on Synthetic Aperture Radar, Nuremberg, Germany, 23–26 April 2012; pp. 730–733. [Google Scholar]
- Sandwell, D.; Mellors, R.; Tong, X.; Wei, M.; Wessel, P. Open radar interferometry software for mapping surface Deformation. EOS Trans. Am. Geophys. Union 2011, 92, 234. [Google Scholar] [CrossRef] [Green Version]
- Wegnüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A.; Frey, O.; Santoro, M. Sentinel-1 Support in the GAMMA Software. Procedia Comput. Sci. 2016, 100, 1305–1312. [Google Scholar] [CrossRef] [Green Version]
- De Luca, C.; Cuccu, R.; Elefante, S.; Zinno, I.; Manunta, M.; Casola, V.; Rivolta, G.; Lanari, R.; Casu, F. An On-Demand Web Tool for the Unsupervised Retrieval of Earth’s Surface Deformation from SAR Data: The P-SBAS Service within the ESA G-POD Environment. Remote Sens. 2015, 7, 15630–15650. [Google Scholar] [CrossRef] [Green Version]
- Cigna, F.; Tapete, D. Sentinel-1 Big Data Processing with P-SBAS InSAR in the Geohazards Exploitation Platform: An Experiment on Coastal Land Subsidence and Landslides in Italy. Remote Sens. 2021, 13, 885. [Google Scholar] [CrossRef]
- Ferretti, A.; Novali, F.; Giannico, C.; Uttini, A.; Iannicella, I.; Mizuno, T. A Squeesar Database Over the Entire Japanese Territory. In Proceedings of the IGARSS 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 2078–2080. [Google Scholar] [CrossRef]
- Bischoff, C.A.; Ferretti, A.; Novali, F.; Uttini, A.; Giannico, C.; Meloni, F. Nationwide deformation monitoring with SqueeSAR® using Sentinel-1 data. Int. Assoc. Hydrol. Sci. 2020, 382, 31–37. [Google Scholar] [CrossRef] [Green Version]
- Kalia, A.; Frei, M.; Lege, T. A Copernicus downstream-service for the nationwide monitoring of surface displacements in Germany. Remote Sens. Environ. 2017, 202, 234–249. [Google Scholar] [CrossRef]
- Dehls, J.F.; Larsen, Y.; Marinkovic, P.; Lauknes, T.R.; Stødle, D.; Moldestad, D.A. A National Insar Deformation Mapping/Monitoring Service In Norway—From Concept To Operations. In Proceedings of the IGARSS, 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5461–5464. [Google Scholar] [CrossRef]
- Papoutsis, I.; Kontoes, C.; Alatza, S.; Apostolakis, A.; Loupasakis, C. InSAR Greece with Parallelized Persistent Scatterer Interferometry: A National Ground Motion Service for Big Copernicus Sentinel-1 Data. Remote Sens. 2020, 12, 3207. [Google Scholar] [CrossRef]
- Bekaert, D.; Karim, M.; Linick, J.P.; Hua, H.; Sangha, S.; Lucas, M.; Malarout, N.; Agram, P.; Pan, L.; Owen, S. Development of open-access Standardized InSAR Displacement Products by the Advanced Rapid Imaging and Analysis (ARIA) Project for Natural Hazards. In Proceedings of the AGU Fall Meeting 2019, San Francisco, CA, USA, 9–13 December 2019. [Google Scholar]
- Lazecký, M.; Spaans, K.; González, P.J.; Maghsoudi, Y.; Morishita, Y.; Albino, F.; Elliott, J.; Greenall, N.; Hatton, E.; Hooper, A. LiCSAR: An Automatic InSAR Tool for Measuring and Monitoring Tectonic and Volcanic Activity. Remote Sens. 2020, 12, 2430. [Google Scholar] [CrossRef]
- Morishita, Y.; Lazecky, M.; Wright, T.; Weiss, J.; Elliott, J.; Hooper, A. LiCSBAS: An Open-Source InSAR Time Series Analysis Package Integrated with the LiCSAR Automated Sentinel-1 InSAR Processor. Remote Sens. 2020, 12, 424. [Google Scholar] [CrossRef] [Green Version]
- Doin, M.; Guillaso, S.; Jolivet, R.; Lasserre, C.; Ducret, G.; Grandin, R.; Pathier, E.; Pinel, V. Presentation of the small baseline NSBAS processing chain on a case example: The Etna deformation monitoring from 2003 to 2010 using Envisat data. In Proceedings of the Fringe 2011 Workshop, Frascati, Italy, 19–23 September 2011. [Google Scholar]
- Grandin, R. Interferometric processing of SLC Sentinel-1 TOPS data. In Proceedings of the FRINGE’15, Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated repeat orbit interferometry package released. EOS Trans. Am. Geophys. Union 2004, 85, 47. [Google Scholar] [CrossRef]
- Minh, D.H.T.; Doin, M.P.; Pathier, E.; Hanssen, R. Advanced methods in time series InSAR. In Displacement Measurement by Remote Sensing Imagery; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Grandin, R.; Klein, E.; Métois, M.; Vigny, C. Three-dimensional displacement field of the 2015 Mw8. 3 Illapel earthquake (Chile) from across-and along-track Sentinel-1 TOPS interferometry. Geophys. Res. Lett. 2016, 43, 2552–2561. [Google Scholar] [CrossRef] [Green Version]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef] [Green Version]
- Ansari, H.; De Zan, F.; Parizzi, A. Study of Systematic Bias in Measuring Surface Deformation with SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1285–1301. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Scheiber, R.; Marotti, L.; Wollstadt, S.; Reigber, A. TOPS Interferometry With TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3179–3188. [Google Scholar] [CrossRef] [Green Version]
- Pinel-Puyssegur, B.; Michel, R.; Avouac, J.P. Multi-Link InSAR Time Series: Enhancement of a Wrapped Interferometric Database. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 784–794. [Google Scholar] [CrossRef]
- Doin, M.P.; Lasserre, C.; Peltzer, G.; Cavalié, O.; Doubre, C. Corrections of stratified tropospheric delays in SAR interferometry: Validation with global atmospheric models. J. Appl. Geophys. 2009, 69, 35–50. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic InSAR tropospheric phase delay corrections from global meteorological reanalysis data. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Grandin, R.; Doin, M.P.; Bollinger, L.; Pinel-Puysségur, B.; Ducret, G.; Jolivet, R.; Sapkota, S.N. Long-term growth of the Himalaya inferred from interseismic InSAR measurement. Geology 2012, 40, 1059–1062. [Google Scholar] [CrossRef] [Green Version]
- López-Quiroz, P.; Doin, M.P.; Tupin, F.; Briole, P.; Nicolas, J.M. Time series analysis of Mexico City subsidence constrained by radar interferometry. J. Appl. Geophys. 2009, 69, 1–15. [Google Scholar] [CrossRef]
- Ryder, I.; Bürgmann, R.; Pollitz, F. Lower crustal relaxation beneath the Tibetan Plateau and Qaidam Basin following the 2001 Kokoxili earthquake. Geophys. J. Int. 2011, 187, 613–630. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Xu, X.; Klinger, Y.; Nocquet, J.M.; Chen, G.; Yu, G.; Jónsson, S. Lower Crustal Heterogeneity Beneath the Northern Tibetan Plateau Constrained by GPS Measurements Following the 2001 Mw7.8 Kokoxili Earthquake. J. Geophys. Res. Solid Earth 2019, 124, 11992–12022. [Google Scholar] [CrossRef] [Green Version]
- Grandin, R.; Socquet, A.; Jacques, E.; Mazzoni, N.; de Chabalier, J.B.; King, G. Sequence of rifting in Afar, Manda-Hararo rift, Ethiopia, 2005–2009: Time-space evolution and interactions between dikes from interferometric synthetic aperture radar and static stress change modeling. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Albino, F.; Biggs, J. Magmatic Processes in the East African Rift System: Insights From a 2015–2020 Sentinel-1 InSAR Survey. Geochem. Geophys. Geosyst. 2021, 22. [Google Scholar] [CrossRef]
- Moore, C.; Wright, T.; Hooper, A.; Biggs, J. The 2017 Eruption of Erta’Ale Volcano, Ethiopia: Insights into the shallow axial plumbing system of an incipient Mid-Ocean Ridge. Geochem. Geophys. Geosyst. 2019, 20, 5727–5743. [Google Scholar] [CrossRef]
- La Rosa, A.; Keir, D.; Doubre, C.; Sani, F.; Corti, G.; Leroy, S.; Ayele, A.; Pagli, C. Lower crustal earthquakes in the March 2018 sequence along the Western Margin of Afar. Geochem. Geophys. Geosyst. 2021, 22. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| File Type | Description |
|---|---|
| APS | Interferogram Atmospheric Phase Screen from Global Atmospheric Model |
| InW/InU | Wrapped/Unwrapped Differential Interferograms |
| InWF | Wrapped Differential Filtered Interferograms |
| Coh | Spatial coherence |
| File Type | Description |
|---|---|
| DTs | Time series of total LOS phase delay (data cube) |
| MV-LOS | Mean LOS Velocity |
| Net | Auxiliary maps for the assessment of the time series quality |
| Stk-In | List of the interferograms file names |
| File Type | Description |
|---|---|
| CosENU | LOS unit vector expressed in local reference frame |
| (East, North, Up components). | |
| DEM | Elevation in meter in radar geometry. Comes in two resolutions. |
| LuT | Lookup Tables used to do the mapping between radar and ground geometry. |
| TCoh | Backscatter properties in 2 looks. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thollard, F.; Clesse, D.; Doin, M.-P.; Donadieu, J.; Durand, P.; Grandin, R.; Lasserre, C.; Laurent, C.; Deschamps-Ostanciaux, E.; Pathier, E.; et al. FLATSIM: The ForM@Ter LArge-Scale Multi-Temporal Sentinel-1 InterferoMetry Service. Remote Sens. 2021, 13, 3734. https://doi.org/10.3390/rs13183734
Thollard F, Clesse D, Doin M-P, Donadieu J, Durand P, Grandin R, Lasserre C, Laurent C, Deschamps-Ostanciaux E, Pathier E, et al. FLATSIM: The ForM@Ter LArge-Scale Multi-Temporal Sentinel-1 InterferoMetry Service. Remote Sensing. 2021; 13(18):3734. https://doi.org/10.3390/rs13183734
Chicago/Turabian StyleThollard, Franck, Dominique Clesse, Marie-Pierre Doin, Joëlle Donadieu, Philippe Durand, Raphaël Grandin, Cécile Lasserre, Christophe Laurent, Emilie Deschamps-Ostanciaux, Erwan Pathier, and et al. 2021. "FLATSIM: The ForM@Ter LArge-Scale Multi-Temporal Sentinel-1 InterferoMetry Service" Remote Sensing 13, no. 18: 3734. https://doi.org/10.3390/rs13183734
APA StyleThollard, F., Clesse, D., Doin, M.-P., Donadieu, J., Durand, P., Grandin, R., Lasserre, C., Laurent, C., Deschamps-Ostanciaux, E., Pathier, E., Pointal, E., Proy, C., & Specht, B. (2021). FLATSIM: The ForM@Ter LArge-Scale Multi-Temporal Sentinel-1 InterferoMetry Service. Remote Sensing, 13(18), 3734. https://doi.org/10.3390/rs13183734