
Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser


Abstract
:
1. Introduction
2. Materials and Methods
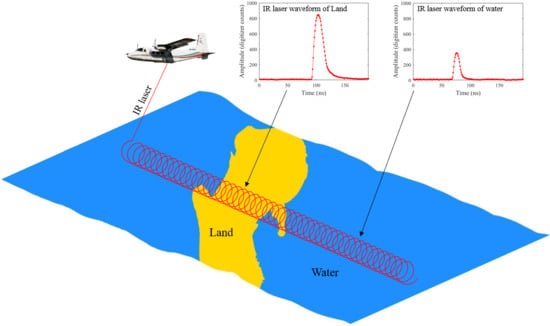
2.1. Research Area and Data Acquisition
2.2. Feature Selection
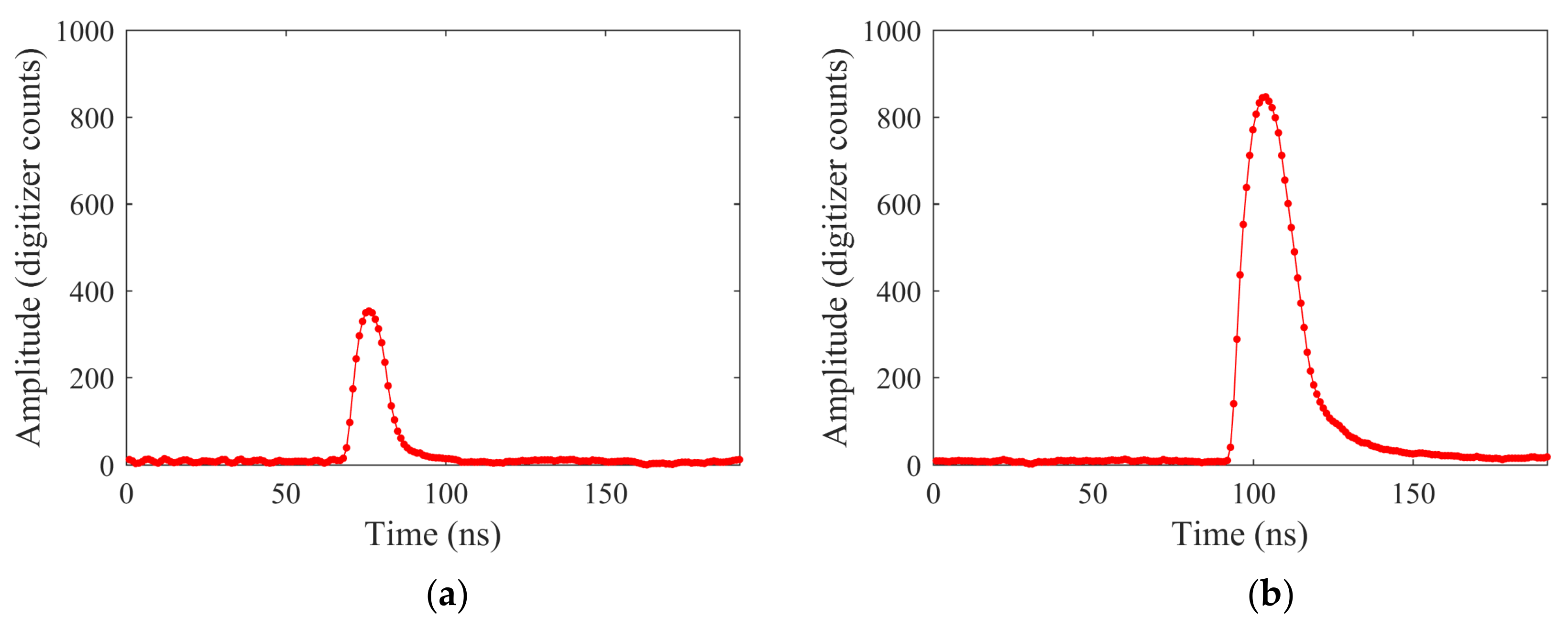
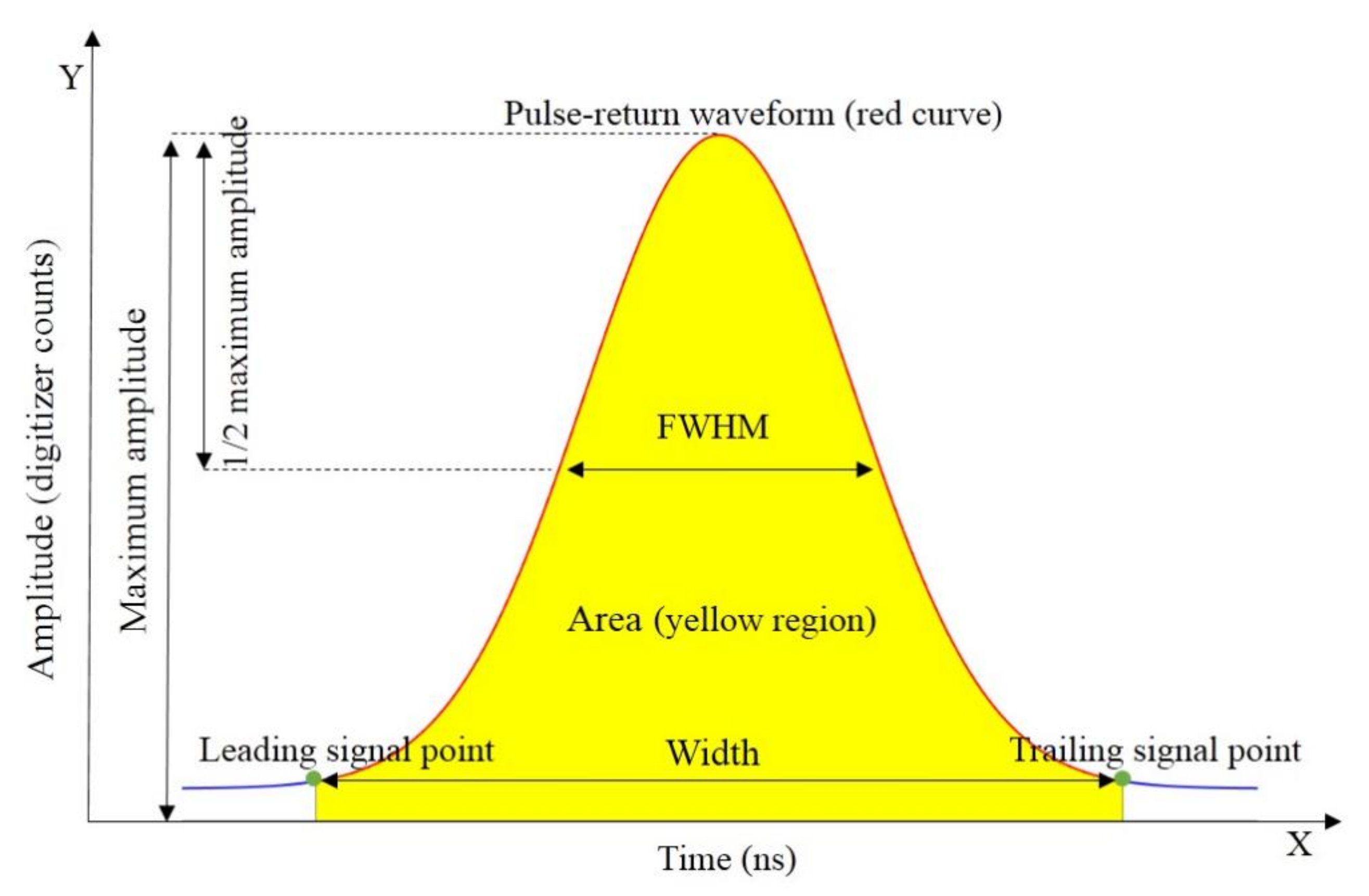
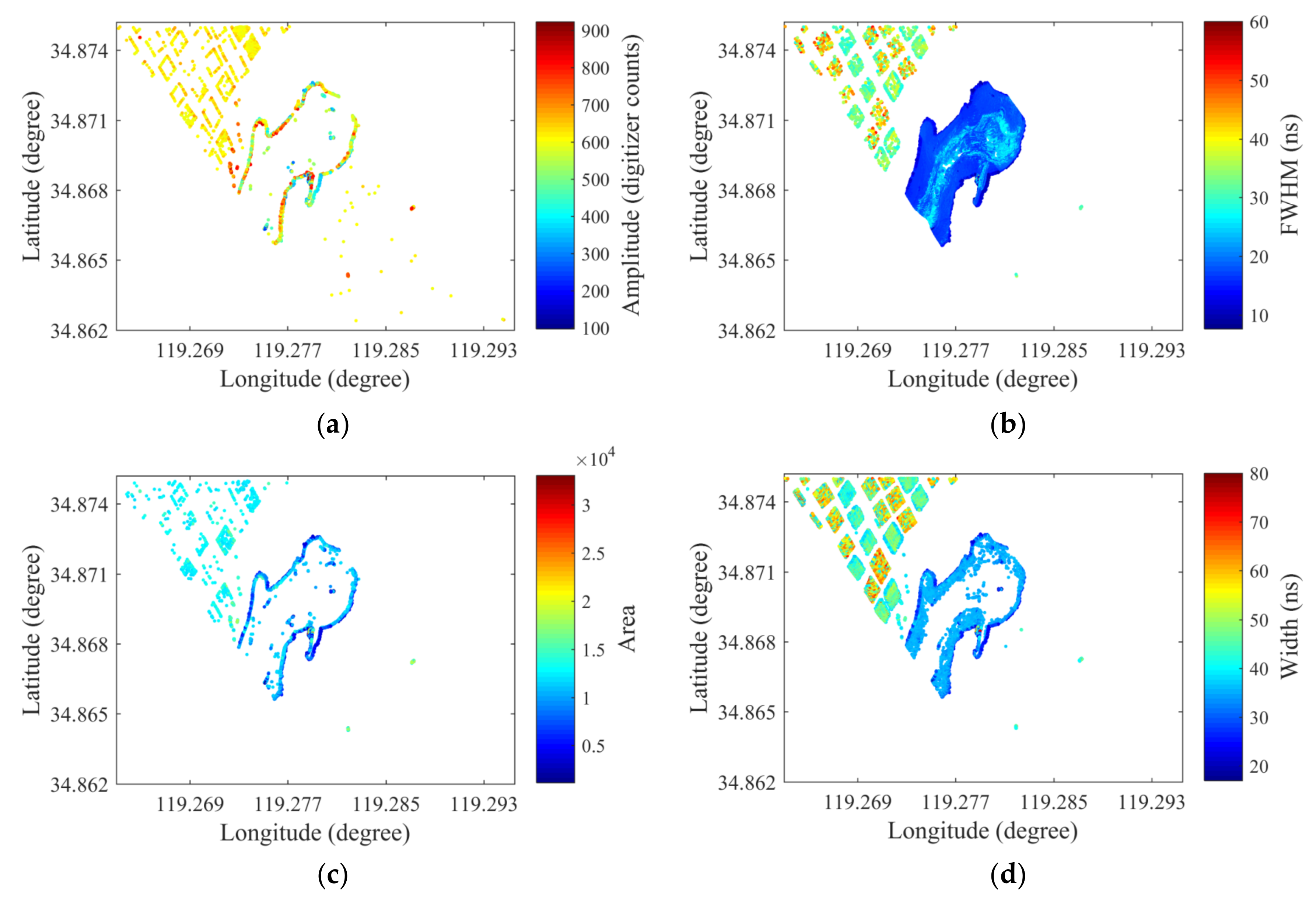
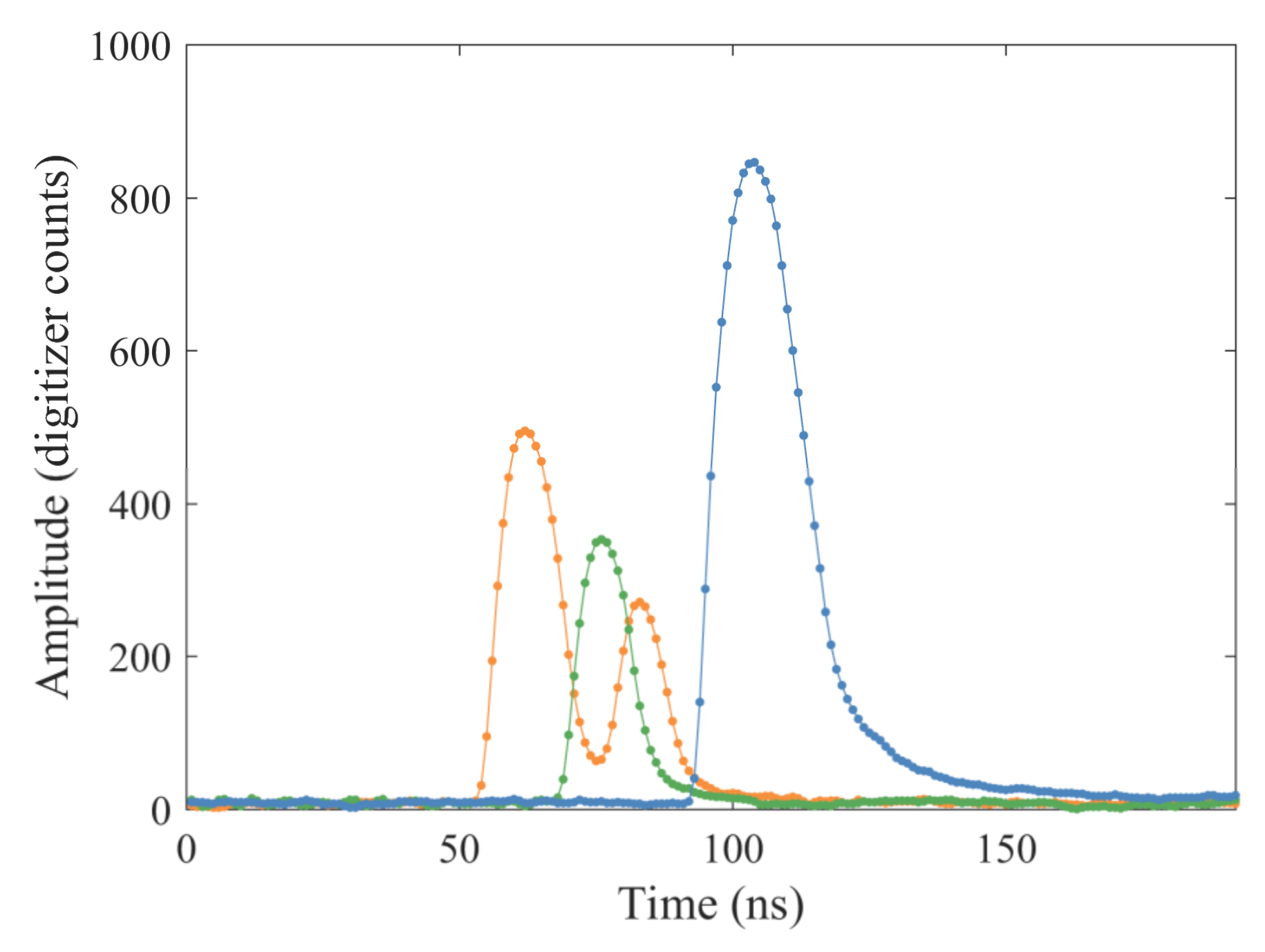
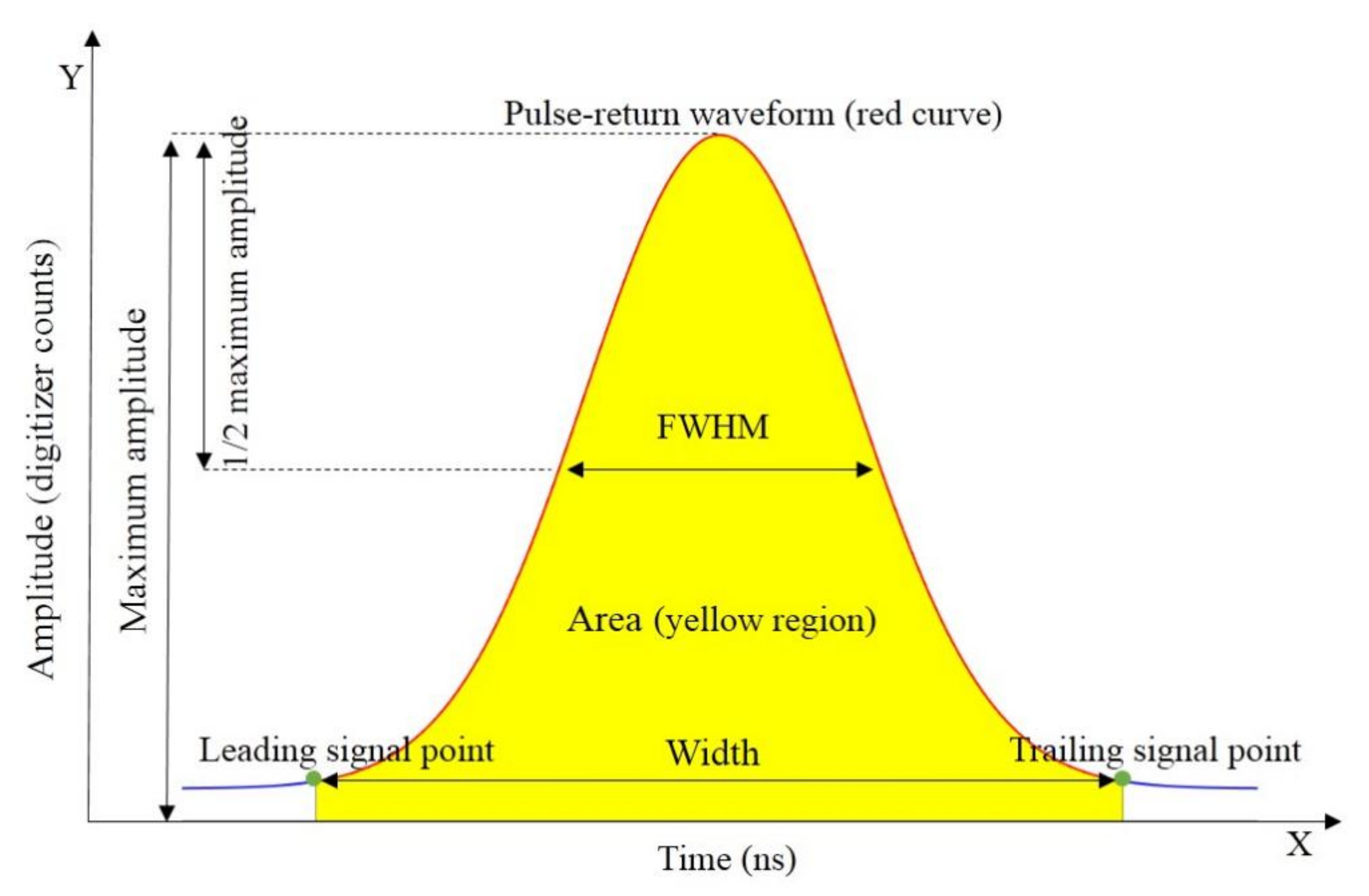
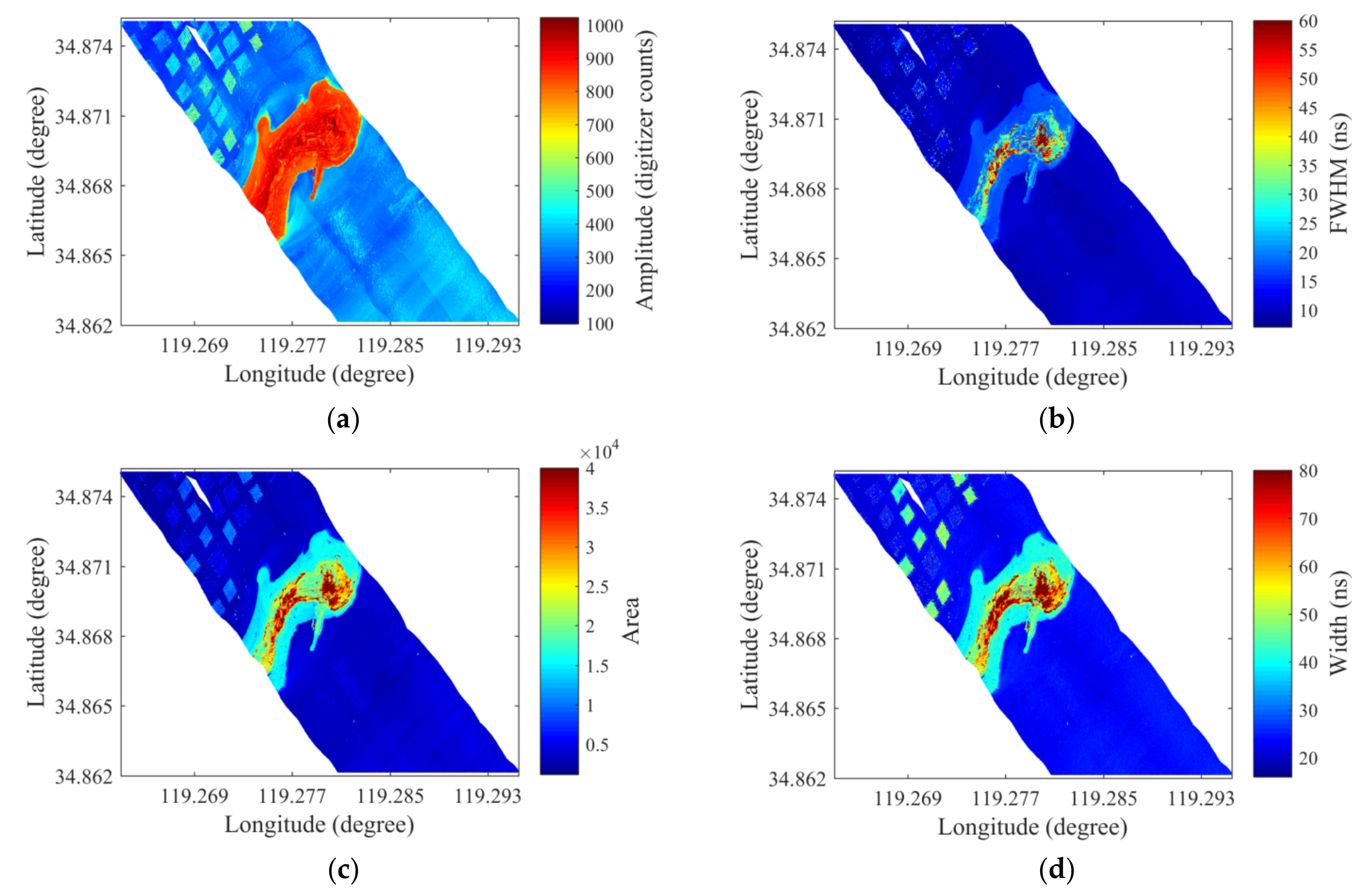
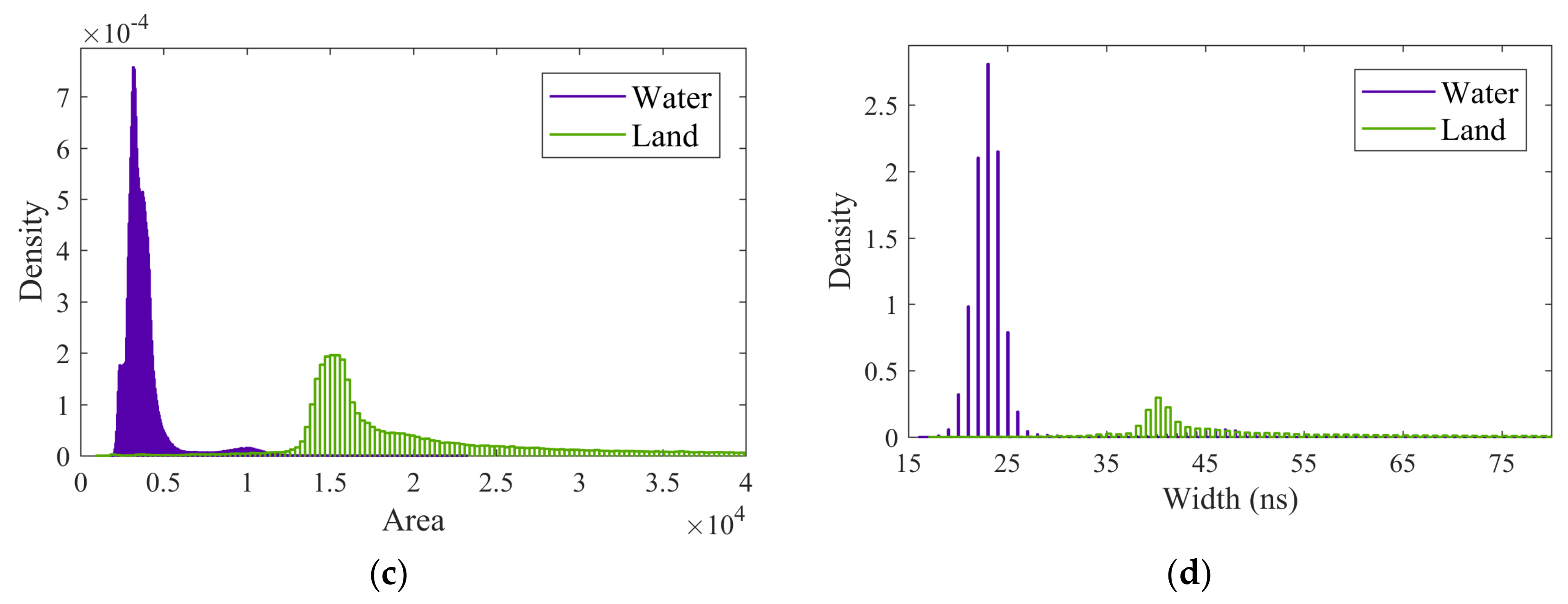
2.2.1. Single Waveform Feature
2.2.2. Combination of Waveform Features
2.3. Dual-Clustering Method for Mislabeled Waveform Correction
2.3.1. K-Means Clustering
- Step 1:
- Randomly select two points from X as the initial centroids of C1 and C2.
- Step 2:
- Calculate the Euclidean distance dj = ∥xi−μj∥ between point xi and centroids μ1 and μ2 and assign point xi to the nearest cluster.
- Step 3:
- Recalculate the centroids of all clusters using the reassigned points.
- Step 4:
- Repeat Steps 2 and 3 until μ1 and μ2 are stable.
2.3.2. DBSCAN Clustering
- Step 1
- Initialize the core point set Ω = ϕ, the number of clusters k = 0, the sample set unvisited Γ = D, and the cluster division C = ϕ.
- Step 2
- All core points can be found for i = 1, 2, …, m by following the steps:
- (1)
- The Eps-neighborhood subsample set NEps(xi) of the sample xi should be determined through distance measurement;
- (2)
- If the number of samples in the subsample set satisfies |NEps(xi)| ≥ MinPts, sample xi will be added to the core point set, that is, Ω = Ω ∪ {xi}.
- Step 3
- If the core point set Ω is equal to ϕ, then the algorithm would end. Subsequently, the cluster division C = {C1, C2, …, Ck}. Otherwise go to step 4.
- Step 4
- A core point o needs to be randomly selected from the core point set Ω. Then, the current core point queue Ωcur = {o}, the serial number k = k + 1, and the current cluster sample set Ck = {o}. The data set unvisited Γ is updated to Γ−{o}.
- Step 5
- If the current core point queue Ωcur is ϕ, cluster C would be {C1, C2, …, Ck} and the core point set Ω would be Ω−Ck. Then, go to Step 3. Otherwise, the core point set Ω would be Ω−Ck.
- Step 6
- A core point o’ is taken from the current core point queue Ωcur. Then, all Eps-neighborhood subsample sets NEps(o’) can be found through the Eps-neighborhood distance threshold Eps. Let Δ equal to NEps (o’) ∩ Γ. Ck updates to Ck ∪ Δ, Γ updates to Γ−Δ, and Ωcur updates to Ωcur ∪ (Δ ∩ Ω)−o’. Then, go to step 5.
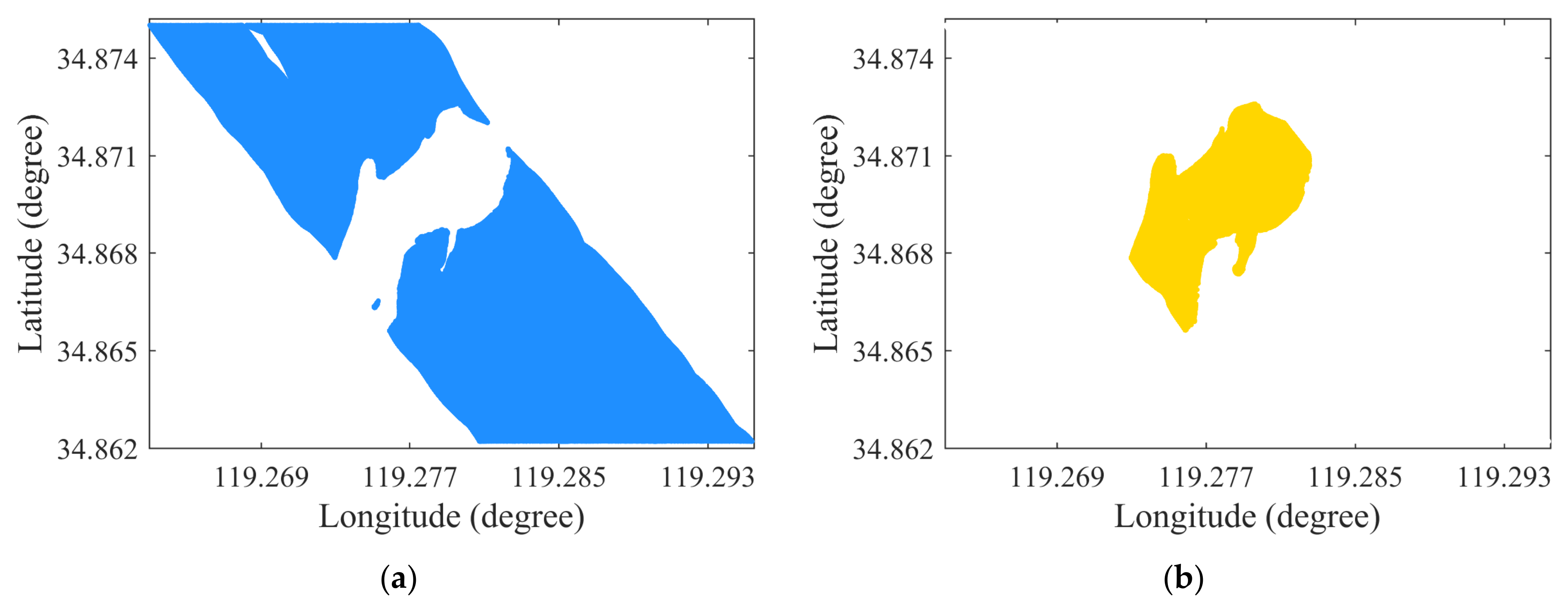
2.4. Reference Water–Land Interface
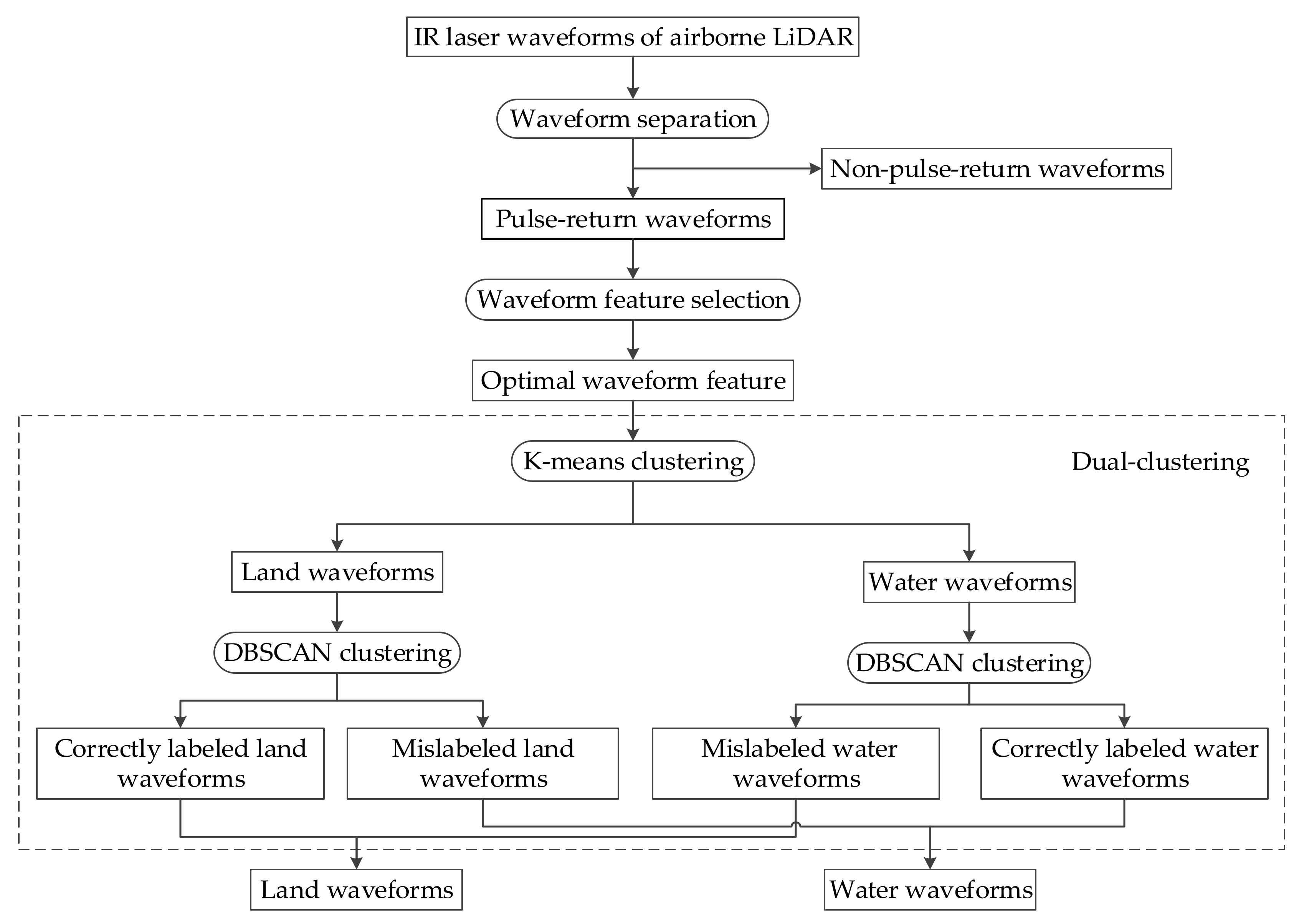
2.5. Flowchart of the Proposed Water–Land Discrimination Procedure
3. Results
3.1. Optimal Feature Selection
3.1.1. Single Waveform Feature
3.1.2. Combination of Waveform Features
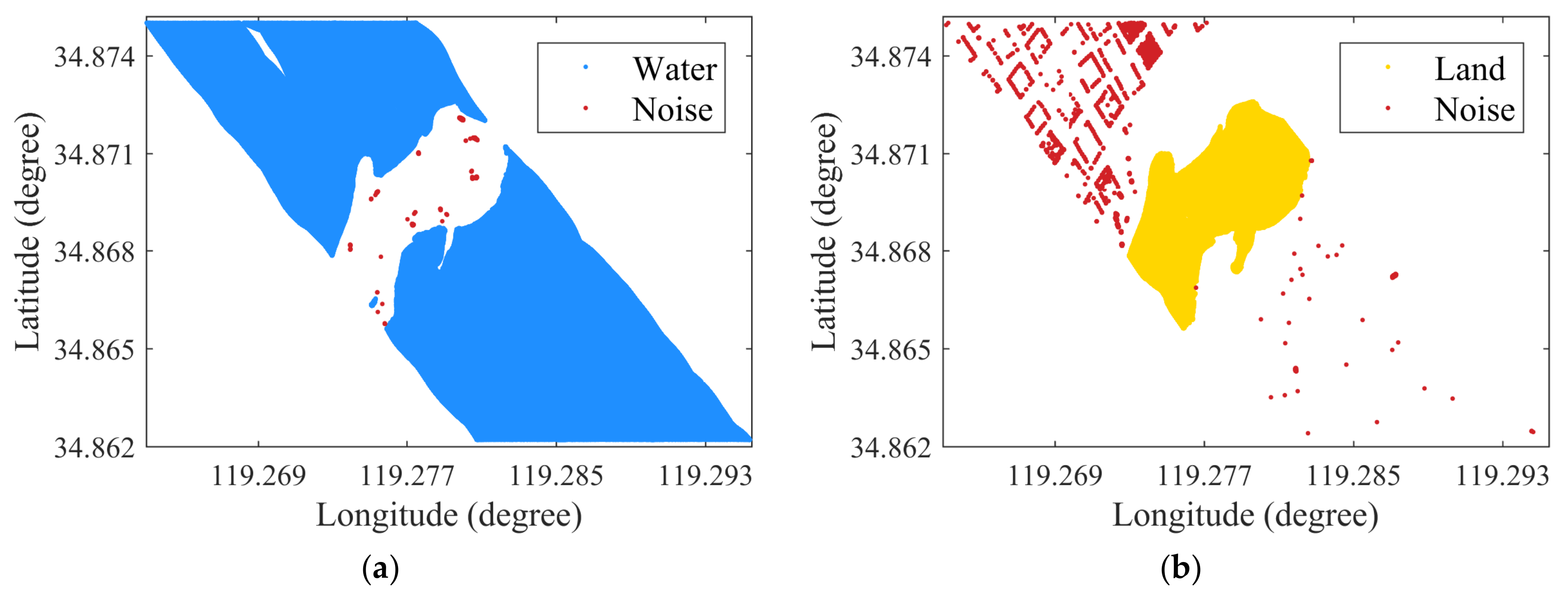
3.2. Dual-Clustering Method
3.2.1. K-Means Clustering
3.2.2. DBSCAN Clustering
3.2.3. Accuracy Analysis
4. Discussion
4.1. Influencing Factors for Water–Land Discrimination
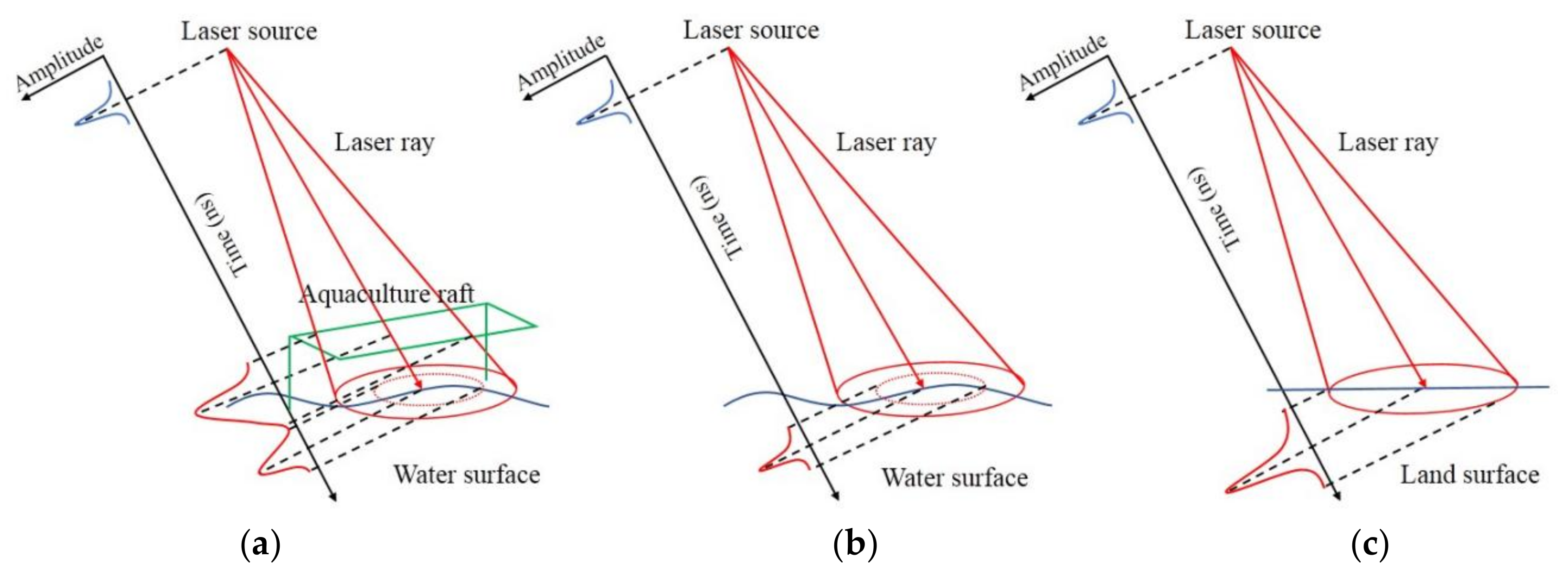
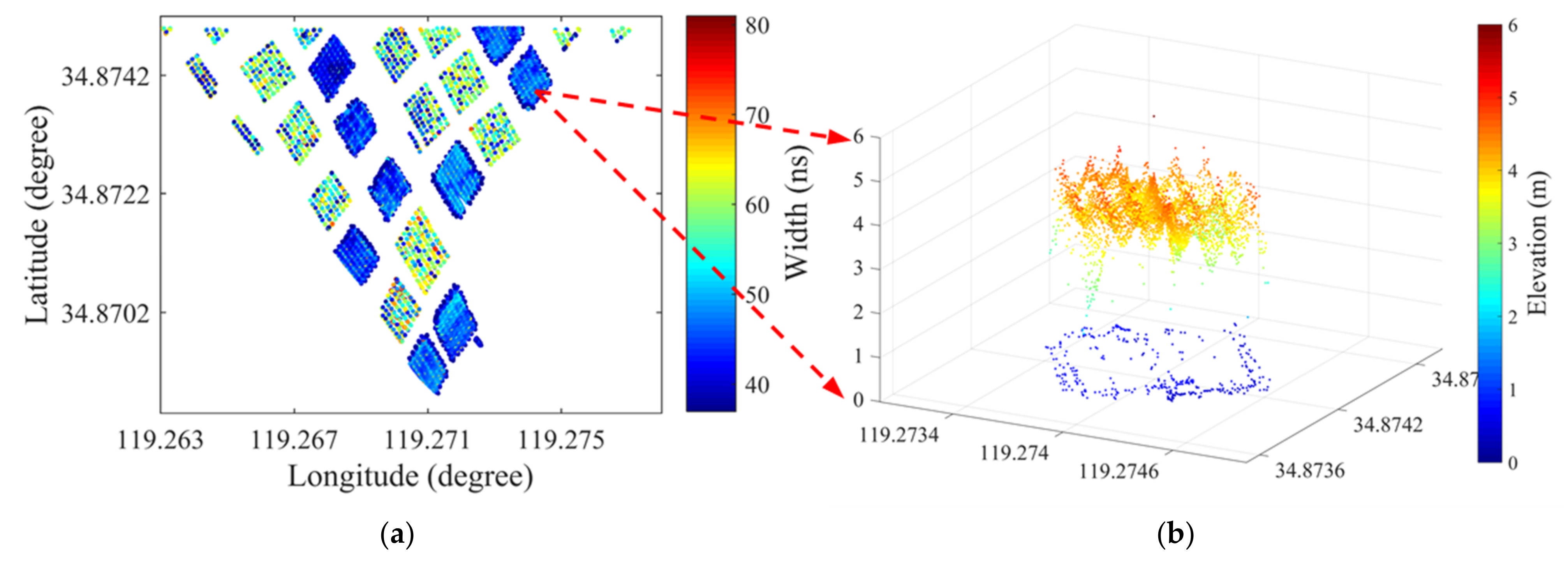
4.2. Detection of Aquaculture Rafts Using Waveform Width
4.3. Applications
5. Conclusions
- (1)
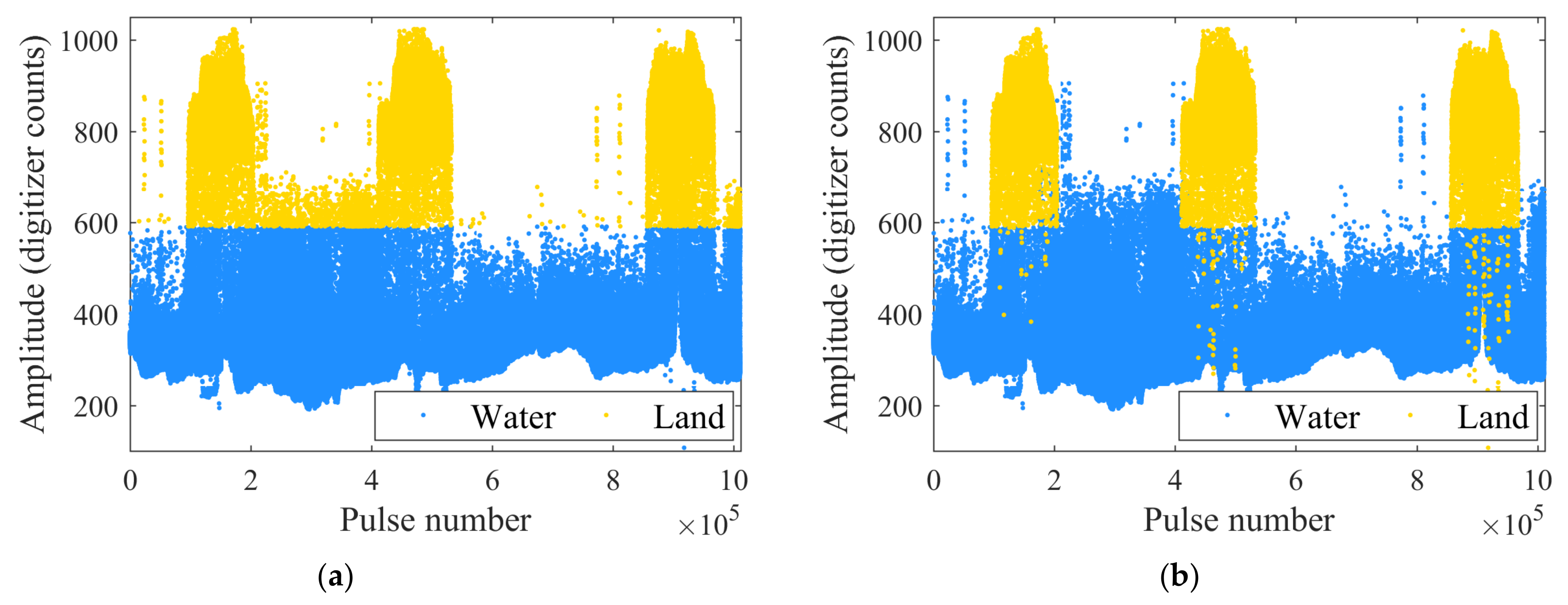
- The performance of water–land discrimination using single waveform features and combinations of waveform features are evaluated and compared through experimental analysis. The overall accuracy rates of water–land discrimination using amplitude; FWHM; area; width; a combination of amplitude and FWHM; a combination of amplitude and area; a combination of amplitude and width; a combination of amplitude, FWHM, area, and width; and a combination of amplitude, FWHM, area, and width after PCA reduction based on K-means clustering are 99.482%, 86.313%, 99.352%, 95.105%, 99.482%, 99.353%, 99.476%, 99.353%, and 99.353%, respectively. The results show that waveform amplitude is the optimal feature for water–land discrimination using IR laser waveforms.
- (2)
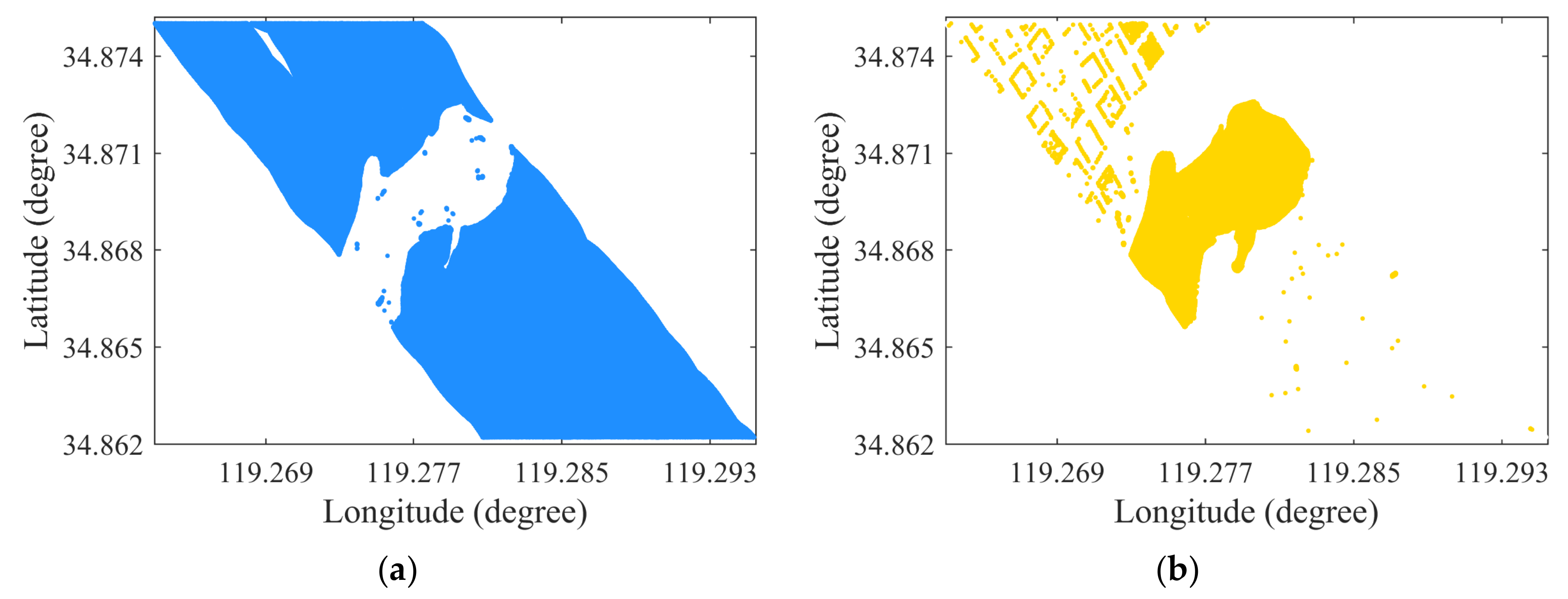
- Dual-clustering has two levels. The first level removes outliers in the waveform amplitudes. The second level removes geographic outliers to correct the mislabeled waveforms derived by the first level. The proposed dual-clustering method can correct mislabeled water or land waveforms and reduce the number of mislabeled waveforms by 48% with respect to the number obtained through traditional K-means clustering. Water–land discrimination using IR waveform amplitude and the proposed dual-clustering method can reach an overall accuracy of 99.730%. The proposed dual-clustering method can correct and reduce mislabeled waveforms with respect to the traditional feature clustering methods.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guenther, G.C. Airborne Laser Hydrography: System Design and Performance Factors; NOAA Professional Paper Series; NOAA: Washington, DC, USA, 1985; pp. 1–385. [Google Scholar]
- Guenther, G.C.; Cunningham, A.G.; LaRocque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne Lidar bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000; pp. 1–27. [Google Scholar]
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Process. Landf. 2008, 33, 773–783. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Nelson, J.M. Mapping river bathymetry with a small footprint green lidar: Applications and challenges. J. Am. Water Resour. Assoc. 2013, 49, 183–204. [Google Scholar] [CrossRef]
- Saylam, K.; Hupp, J.R.; Averett, A.R.; Gutelius, W.F.; Gelhar, B.W. Airborne lidar bathymetry: Assessing quality assurance and quality control methods with Leica Chiroptera examples. Int. J. Remote. Sens. 2018, 39, 2518–2542. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.-S.; Pastol, Y.; Le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2013, II-5/W2, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Shallow Water Measurements Using a Single Green Laser Corrected by Building a Near Water Surface Penetration Model. Remote Sens. 2017, 9, 426. [Google Scholar] [CrossRef] [Green Version]
- Pe’Eri, S.; Morgan, L.V.; Philpot, W.D.; Armstrong, A.A. Land-Water Interface Resolved from Airborne LIDAR Bathymetry (ALB) Waveforms. J. Coast. Res. 2011, 62, 75–85. [Google Scholar] [CrossRef]
- Collin, A.; Long, B.; Archambault, P. Merging land-marine realms: Spatial patterns of seamless coastal habitats using a multispectral LiDAR. Remote. Sens. Environ. 2012, 123, 390–399. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zhao, J.; Zhou, F. Water–land classifification using three-dimensional point cloud data of airborne LiDAR bathymetry based on elevation threshold intervals. J. Appl. Remote. Sens. 2019, 13, 034511. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zhao, J.; Zhou, F. An Improved Water–land Discriminator Using Laser Waveform Amplitude and Point Cloud Elevation of Airborne LiDAR. J. Coast. Res. 2021. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J.; Zhang, H.; Zhou, F. Remote Sensing of Suspended Sediment Concentrations Based on the Waveform Decomposition of Airborne LiDAR Bathymetry. Remote Sens. 2018, 10, 247. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Zhao, J.; Zhang, H.; Zhou, F. Remote Sensing of Sub-Surface Suspended Sediment Concentration by Using the Range Bias of Green Surface Point of Airborne LiDAR Bathymetry. Remote Sens. 2018, 10, 681. [Google Scholar] [CrossRef] [Green Version]
- Tulldahl, H.M.; Steinvall, K.O. Simulation of sea surface wave influence on small target detection with airborne laser depth sounding. Appl. Opt. 2004, 43, 2462–2483. [Google Scholar] [CrossRef] [PubMed]
- Westfeld, P.; Maas, H.-G.; Richter, K.; Weiß, R. Analysis and correction of ocean wave pattern induced systematic coordinate errors in airborne LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2017, 128, 314–325. [Google Scholar] [CrossRef]
- Xu, W.; Guo, K.; Liu, Y.; Tian, Z.; Tang, Q.; Dong, Z.; Li, J. Refraction error correction of Airborne LiDAR Bathymetry data considering sea surface waves. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102402. [Google Scholar] [CrossRef]
- Guo, K.; Li, Q.; Mao, Q.; Wang, C.; Zhu, J.; Liu, Y.; Xu, W.; Zhang, D.; Wu, A. Errors of Airborne Bathymetry LiDAR Detection Caused by Ocean Waves and Dimension-Based Laser Incidence Correction. Remote Sens. 2021, 13, 1750. [Google Scholar] [CrossRef]
- Wang, C.-K.; Philpot, W. Using airborne bathymetric lidar to detect bottom type variation in shallow waters. Remote Sens. Environ. 2007, 106, 123–135. [Google Scholar] [CrossRef]
- Narayanan, R.; Sohn, G.; Kim, H.B.; Miller, J.R. Soft classification of mixed seabed points based on fuzzy clustering analysis using airborne LIDAR bathymetry data. J. Appl. Remote Sens. 2011, 5, 053534. [Google Scholar] [CrossRef]
- Su, D.; Yang, F.; Ma, Y.; Zhang, K.; Huang, J.; Wang, M. Classification of coral reefs in the south china sea by combining air-borne lidar bathymetry bottom waveforms and bathymetric features. IEEE Trans. Geosci. Remote Sens. 2019, 57, 815–828. [Google Scholar] [CrossRef]
- Guenther, G.C.; Larocque, P.E.; Lillycrop, W.J. Multiple surface channels in Scanning Hydrographic Operational Airborne Lidar Survey (SHOALS) airborne lidar. In Proceedings of the Ocean Optics XII, Bergen, Norway, 26 October 1994; Volume 2258, pp. 422–430. [Google Scholar]
- Pe’eri, S.; Philpot, W. Increasing the Existence of Very Shallow-Water LIDAR Measurements Using the Red-Channel Wave-forms. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1217–1223. [Google Scholar] [CrossRef]
- Cao, B.; Zhu, S.; Qiu, Z.; Cao, B. Water–land classification for LiDAR bathymetric data based on echo waveform characteristics. Hydrographic surveying and charting. Hydrogr. Surv. Chart. 2018, 38, 12–16. [Google Scholar]
- Qiu, Z.; Cao, B. Water–land classification method for airborne LiDAR bathymetric data. In Proceedings of the China Inertial Technology Society High-end Frontier Special Topics Academic Conference, Beijing, China, 10 December 2017; pp. 328–338. [Google Scholar]
- Huang, T.; Tao, B.; Mao, Z.; He, Y.; Hu, S.; Wang, C.; Yu, J.; Chen, P. Classification of sea and land waveform based on multi–channel ocean LiDAR. Chin. J. Lasers 2017, 44, 294–303. [Google Scholar]
- Fuchs, E.; Tuell, G. Conceptual design of the CZMIL data acquisition system (DAS): Integrating a new bathymetric lidar with a commercial spectrometer and metric camera for coastal mapping applications. Proc. SPIE 2010, 7695, 76950U. [Google Scholar] [CrossRef]
- Zhang, X.; Lewis, M.; Johnson, B. Influence of bubbles on scattering of light in the ocean. Appl. Opt. 1998, 37, 6525–6536. [Google Scholar] [CrossRef] [PubMed]
- Pierce, J.W.; Fuchs, E.; Nelson, S.; Feygels, V.; Tuell, G. Development of a novel laser system for the CZMIL lidar. Proc. SPIE 2010, 7695, 76950. [Google Scholar] [CrossRef]
- Payment, A.; Feygels, V.; Fuchs, E. Proposed lidar receiver architecture for the CZMIL system. Proc. SPIE 2010, 7695, 76950. [Google Scholar] [CrossRef]
- Fuchs, E.; Mathur, A. Utilizing circular scanning in the CZMIL system. Proc. SPIE 2010, 7695, 76950W. [Google Scholar] [CrossRef]
- Zhao, X.; Liang, G.; Liang, Y.; Zhao, J.; Zhou, F. Background noise reduction for airborne bathymetric full waveforms by cre-ating trend models using Optech CZMIL in the Yellow Sea of China. Appl. Opt. 2020, 59, 11019–11026. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. A local search approximation algorithm for k-means clustering. Comput. Geom. 2004, 28, 89–112. [Google Scholar] [CrossRef]
- Abdeyazdan, M. Data clustering based on hybrid K-harmonic means and modifier imperialist competitive algorithm. J. Supercomput. 2013, 68, 574–598. [Google Scholar] [CrossRef]
- Li, R.; Huang, Y.; Wang, J. Long-term traffic volume prediction based on K-means Gaussian interval type-2 fuzzy sets. IEEE/CAA J. Autom. Sin. 2019, 1–8. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. AAAI Press 1996, 96, 226–231. [Google Scholar]
- Cui, H.; Wu, W.; Zhang, Z.; Han, F.; Liu, Z. Clustering and application of grain temperature statistical parameters based on the DBSCAN algorithm. J. Stored Prod. Res. 2021, 93, 101819. [Google Scholar] [CrossRef]
- Çelik, M.; Dadaşer-Çelik, F.; Dokuz, A.Ş. Anomaly detection in temperature data using DBSCAN algorithm. In Proceedings of the 2011 International Symposium on Innovations in Intelligent Systems and Applications, Istanbul, Turkey, 15–18 June 2011; pp. 91–95. [Google Scholar]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-Time Superpixel Segmentation by DBSCAN Clustering Algorithm. IEEE Trans. Image Process. 2016, 25, 5933–5942. [Google Scholar] [CrossRef] [Green Version]
- Randazzo, G.; Barreca, G.; Cascio, M.; Crupi, A.; Fontana, M.; Gregorio, F.; Lanza, S.; Muzirafuti, A. Analysis of Very High Spatial Resolution Images for Automatic Shoreline Extraction and Satellite-Derived Bathymetry Mapping. Geosciences 2020, 10, 172. [Google Scholar] [CrossRef]
- Carr, D.A. A Study of the Target Detection Capabilities of an Airborne Lidar Bathymetry System. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2013. [Google Scholar]
- Zhao, X.; Zhao, J.; Wang, X.; Zhou, F. Improved waveform decomposition with bound constraints for green waveforms of airborne LiDAR bathymetry. J. Appl. Remote Sens. 2020, 14, 027502. [Google Scholar] [CrossRef]
- Geng, H.; Yan, T.; Yu, R.; Zhang, Q.; Kong, F.; Zhou, M. Comparative study on germination of Ulva prolifera spores on different substrates. Oceanol. Limnol. Sin. 2018, 49, 1006–1013. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Flight altitude | 400 m (nominal) |
| Flight velocity | 140 kts (nominal) |
| Laser pulse repetition rate | 10 kHz |
| Scanner frequency | 27 Hz |
| Laser wavelength | IR: 1064 nm; green: 532 nm |
| Maximum measurable depth | 4.2/Kd (bottom power reflectivity > 15%) |
| Minimum measurable depth | 0.15 m |
| Depth accuracy | (0.32 + (0.013 d)2)½ m, 2σ |
| Horizontal accuracy | (3.5 + 0.05 d) m, 2σ |
| Scan angle | 20° (circular scan) |
| Cross-track swath width | 294 m (nominal) |
| Water (Reference Label) | Land (Reference Label) | |
|---|---|---|
| Water (discriminated label) | TN | FN |
| Land (discriminated label) | FP | TP |
| Feature | Confusion Matrix | Overall Accuracy | ||
|---|---|---|---|---|
| Reference Water | Reference Land | |||
| Amplitude | Discriminated water | 839,274 | 1826 | 99.48% |
| Discriminated land | 3416 | 166,616 | ||
| FWHM | Discriminated water | 840,597 | 136,299 | 86.31% |
| Discriminated land | 2093 | 32,143 | ||
| Area | Discriminated water | 841,276 | 5139 | 99.35% |
| Discriminated land | 1414 | 163,303 | ||
| Width | Discriminated water | 802,969 | 9769 | 95.11% |
| Discriminated land | 39,721 | 158,673 | ||
| Feature | Confusion Matrix | Overall Accuracy | ||
|---|---|---|---|---|
| Reference Water | Reference Land | |||
| Amplitude and FWHM | Discriminated water | 839,274 | 1826 | 99.48% |
| Discriminated land | 3416 | 166,616 | ||
| Amplitude and area | Discriminated water | 841,275 | 5130 | 99.35% |
| Discriminated land | 1415 | 163,312 | ||
| Amplitude and width | Discriminated water | 839,219 | 1826 | 99.48% |
| Discriminated land | 3471 | 166,616 | ||
| Combination of amplitude, FWHM, area, and width | Discriminated water | 841,275 | 5130 | 99.35% |
| Discriminated land | 1415 | 163,312 | ||
| Combination of amplitude, FWHM, area, and width after PCA reduction | Discriminated water | 841,276 | 5129 | 99.35% |
| Discriminated land | 1414 | 163,313 | ||
| Method | Confusion Matrix | Overall Accuracy | ||
|---|---|---|---|---|
| Reference Water | Reference Land | |||
| K-means | Discriminated water | 839,274 | 1826 | 99.48% |
| Discriminated land | 3416 | 166,616 | ||
| Dual clustering | Discriminated water | 841,615 | 1659 | 99.73% |
| Discriminated land | 1075 | 166,783 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, G.; Zhao, X.; Zhao, J.; Zhou, F. Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser. Remote Sens. 2021, 13, 3628. https://doi.org/10.3390/rs13183628
Liang G, Zhao X, Zhao J, Zhou F. Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser. Remote Sensing. 2021; 13(18):3628. https://doi.org/10.3390/rs13183628
Chicago/Turabian StyleLiang, Gang, Xinglei Zhao, Jianhu Zhao, and Fengnian Zhou. 2021. "Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser" Remote Sensing 13, no. 18: 3628. https://doi.org/10.3390/rs13183628
APA StyleLiang, G., Zhao, X., Zhao, J., & Zhou, F. (2021). Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser. Remote Sensing, 13(18), 3628. https://doi.org/10.3390/rs13183628