
Assessing Repeatability and Reproducibility of Structure-from-Motion Photogrammetry for 3D Terrain Mapping of Riverbeds

 ,
,  ,
,  , and
, and 
Abstract
:
1. Introduction
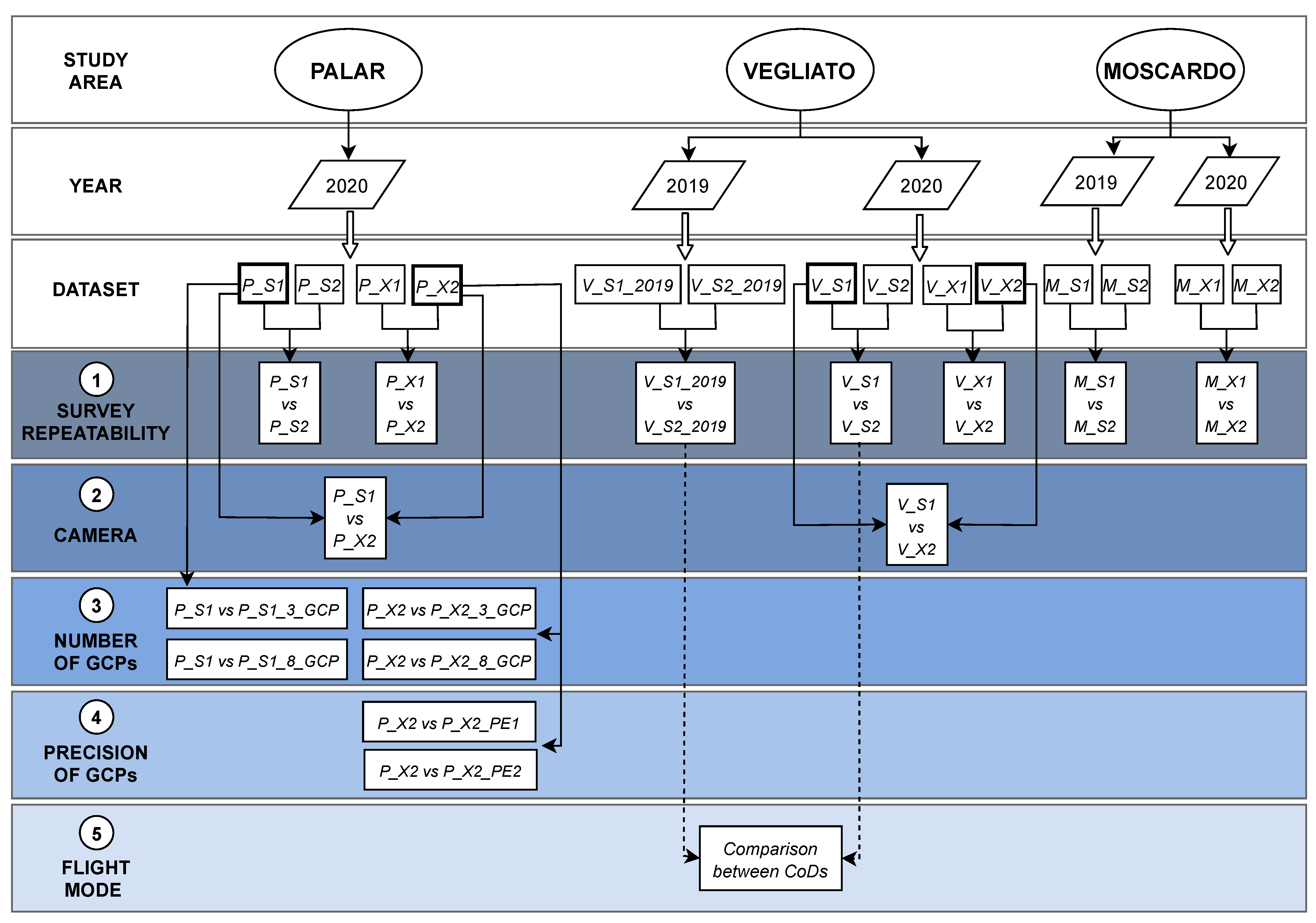
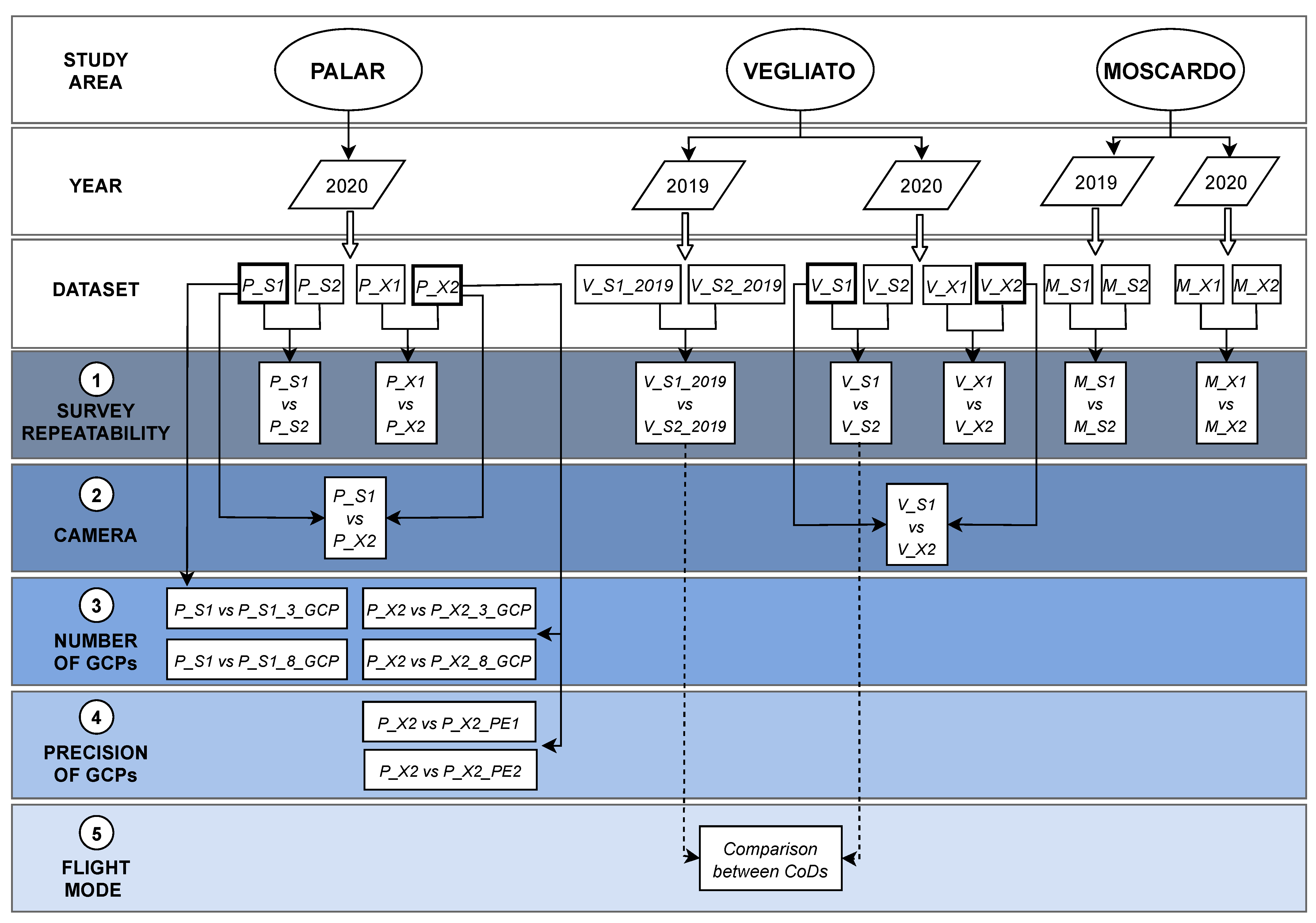
2. Materials and Methods
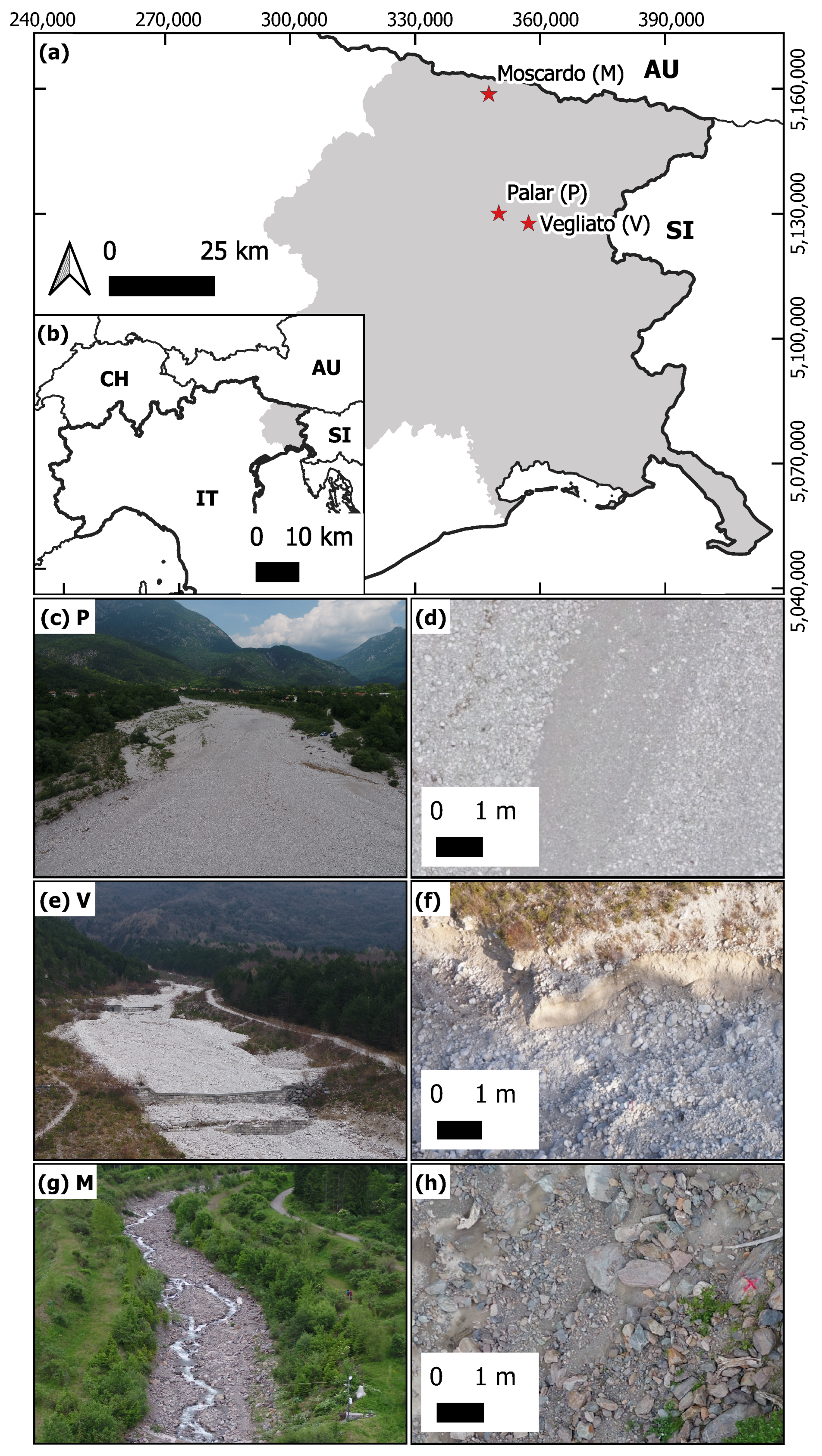
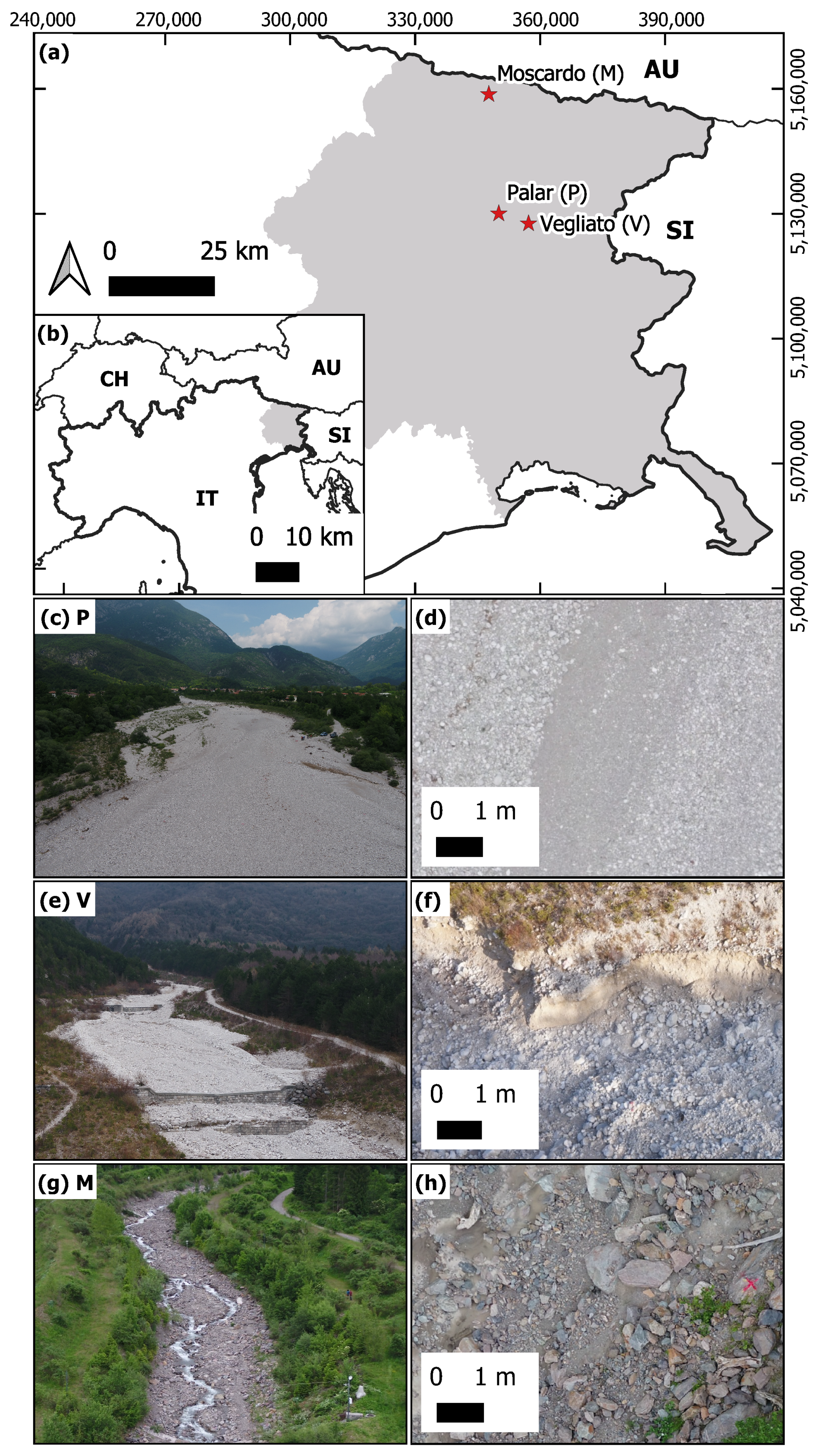
2.1. Study Areas
2.2. Data Acquisition
2.3. Data Processing
3. Results
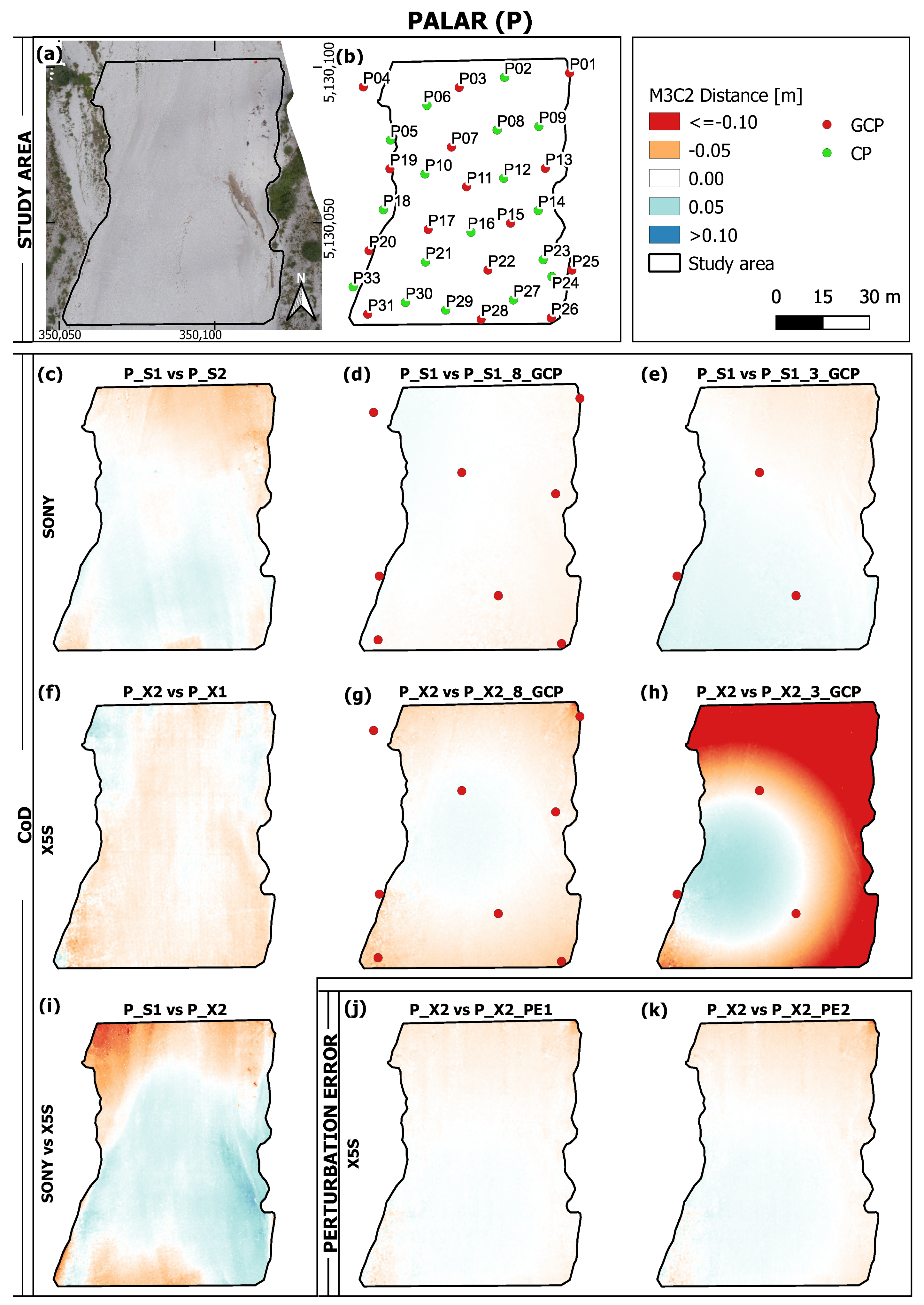
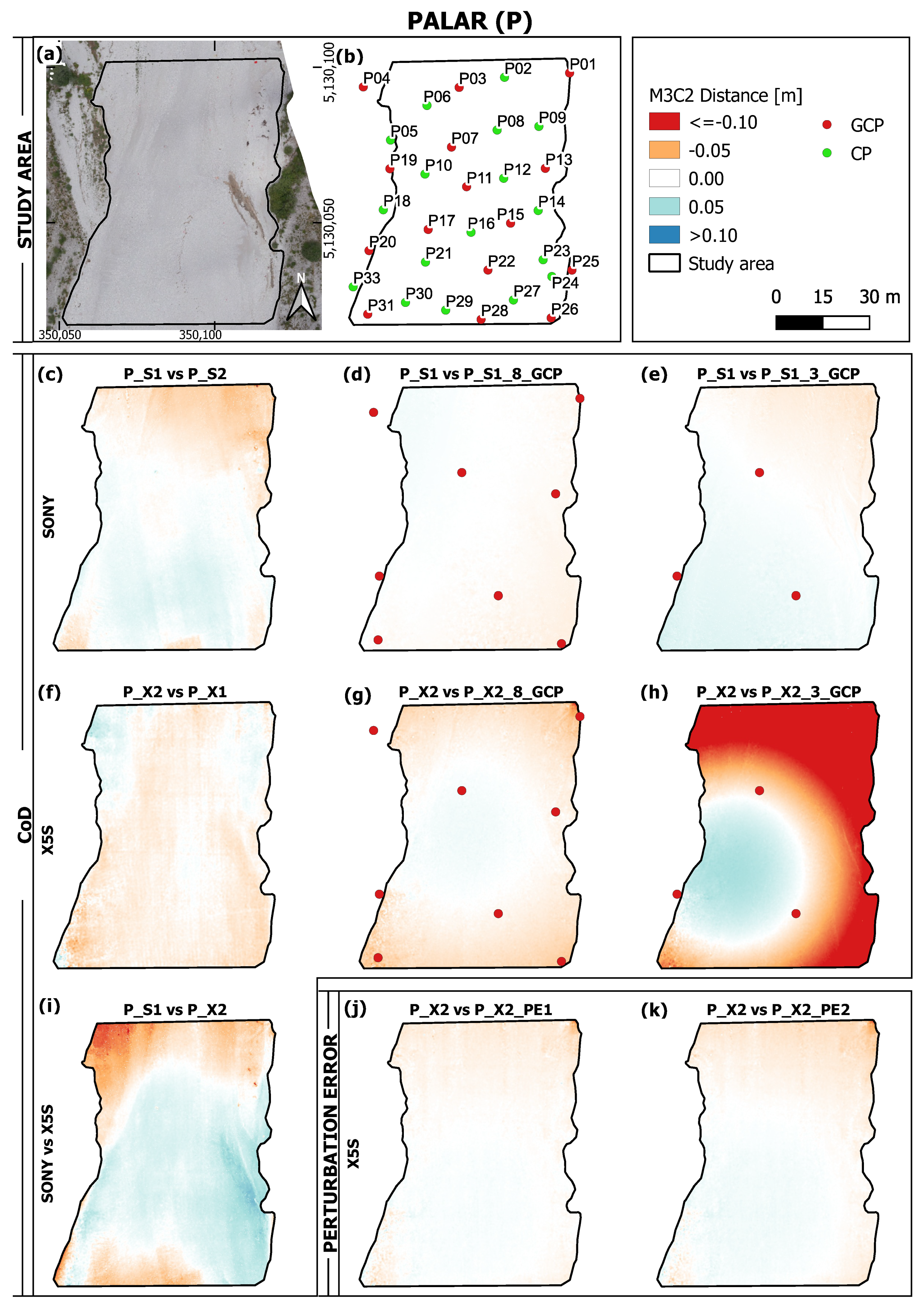
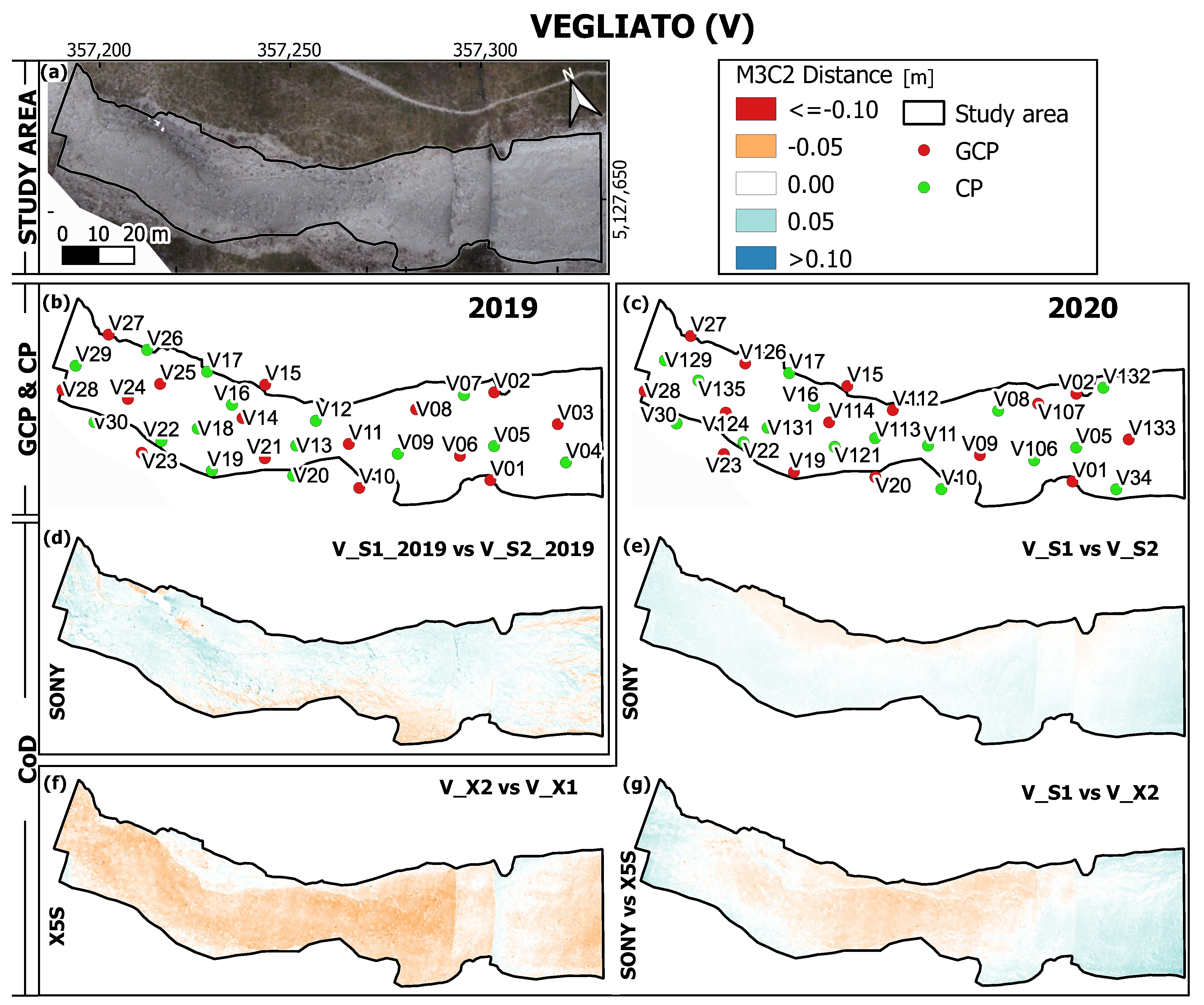
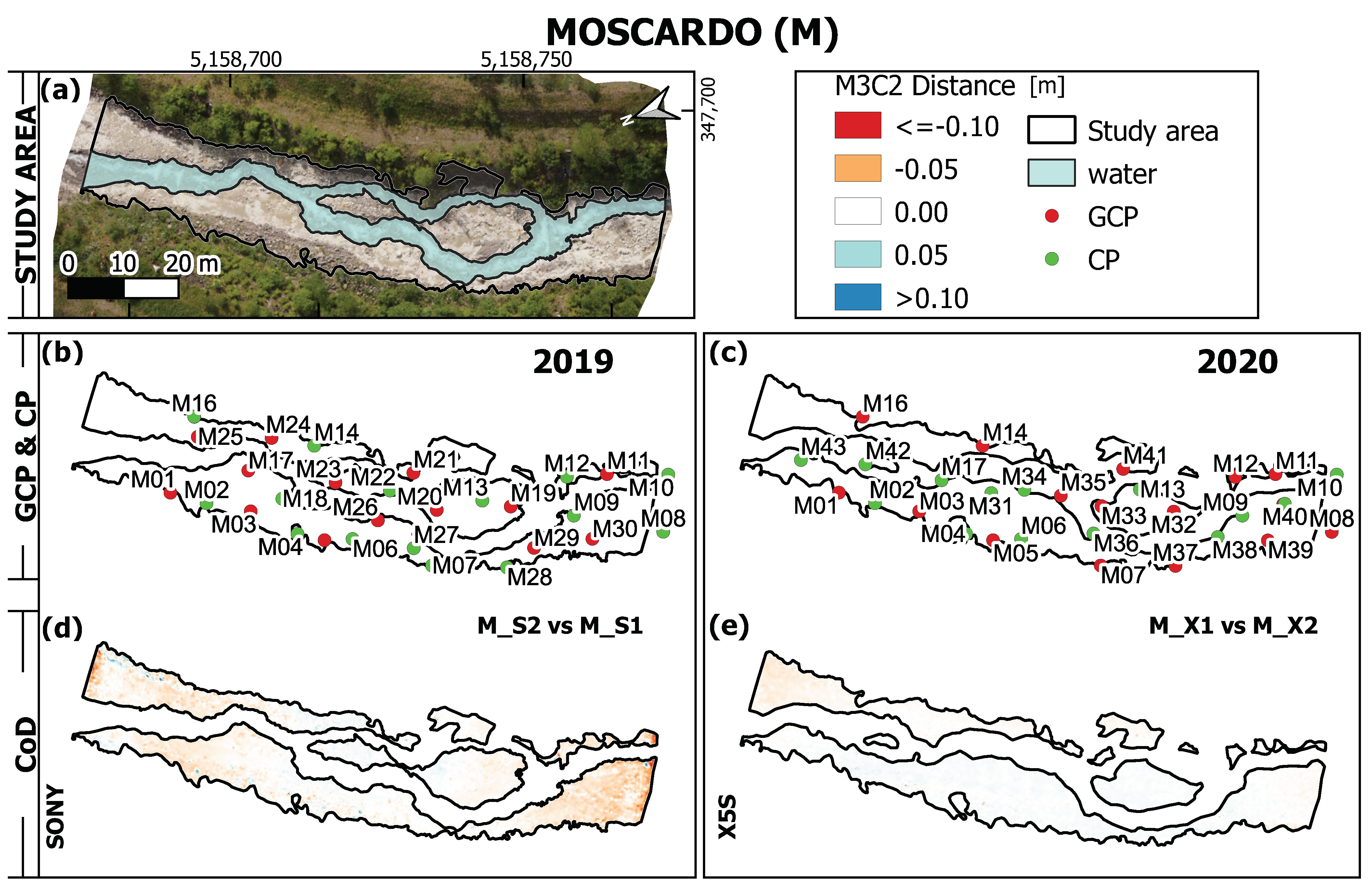
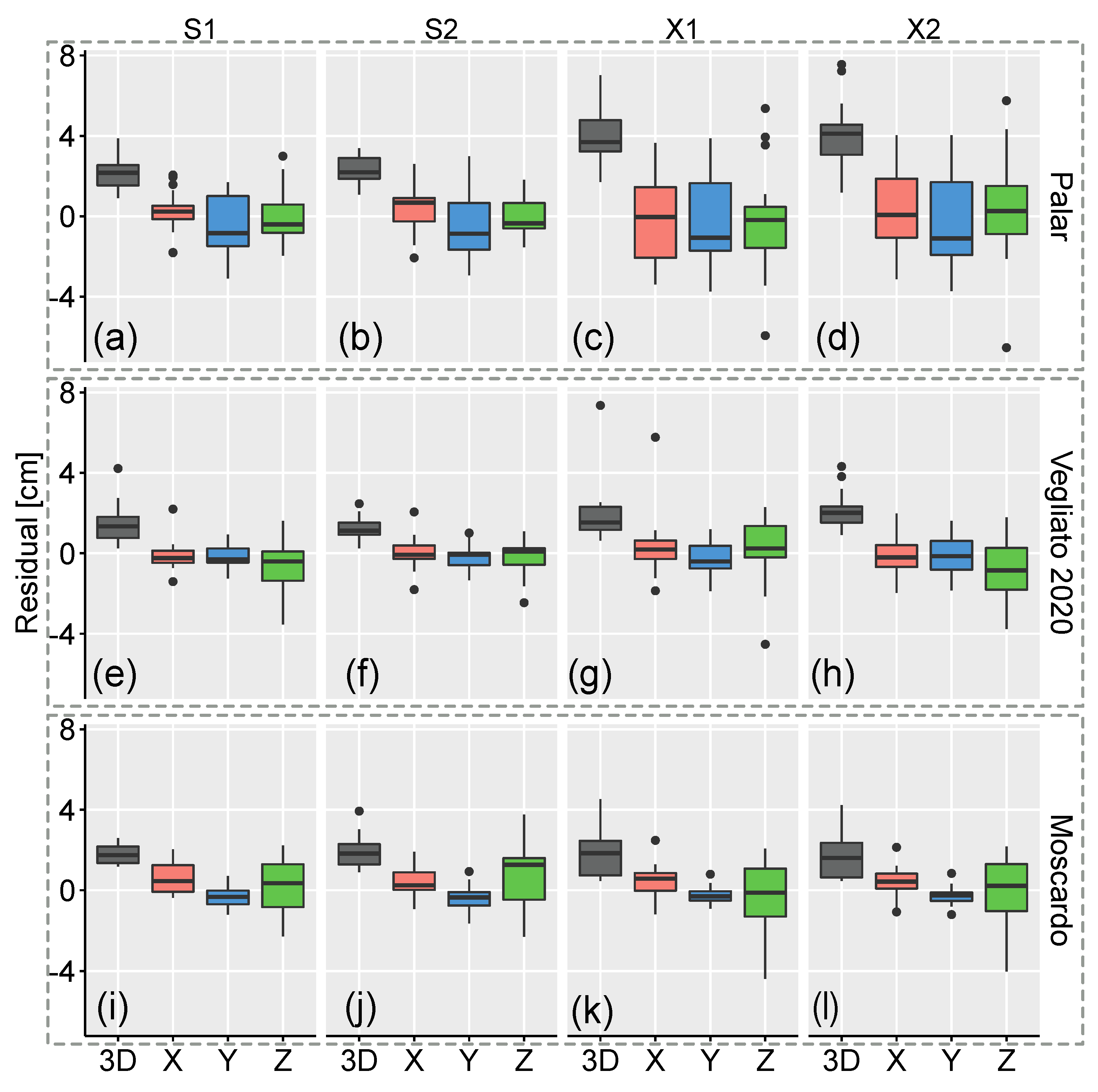
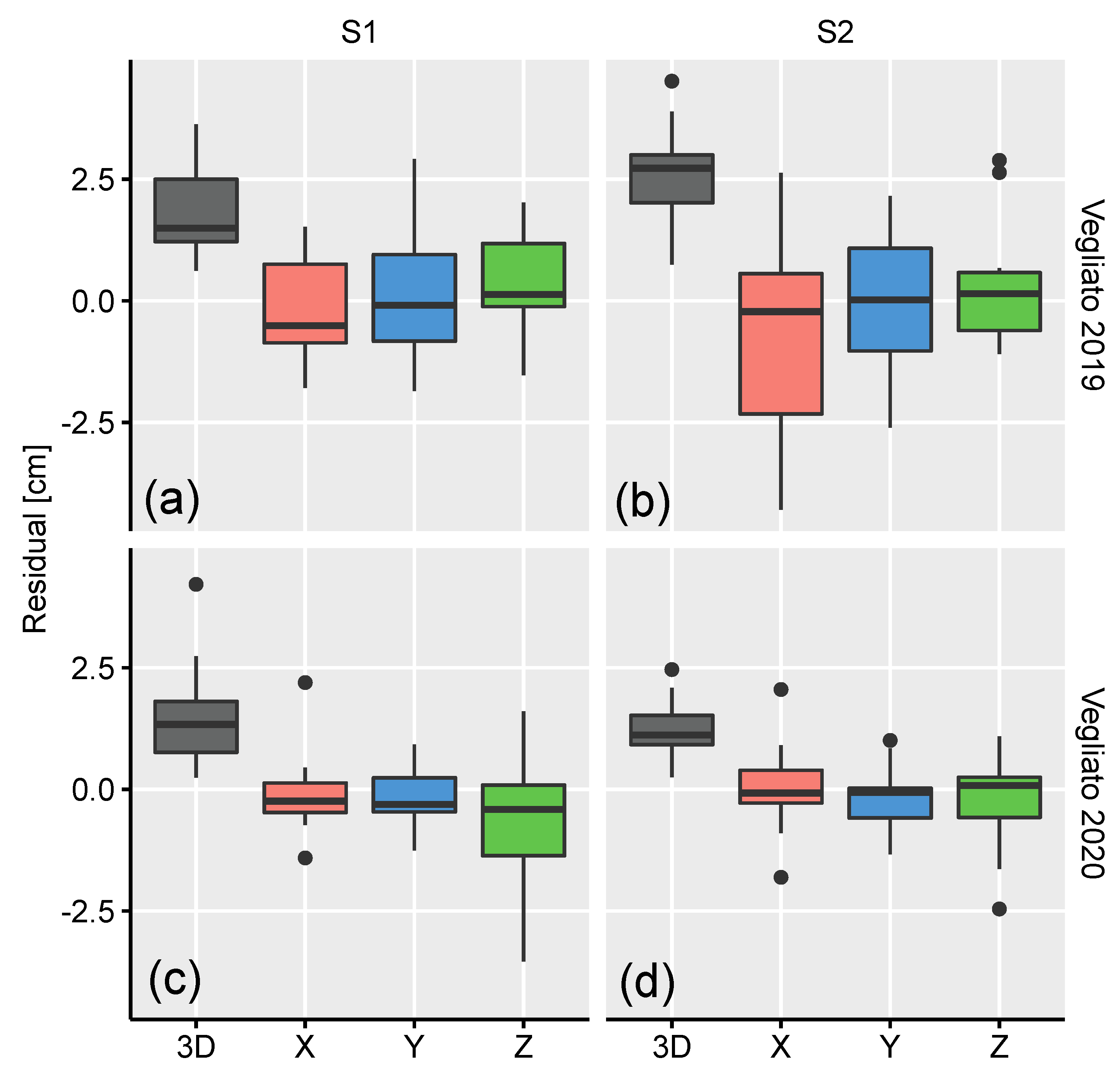
3.1. Assessment of Survey Repeatability and Camera Influence
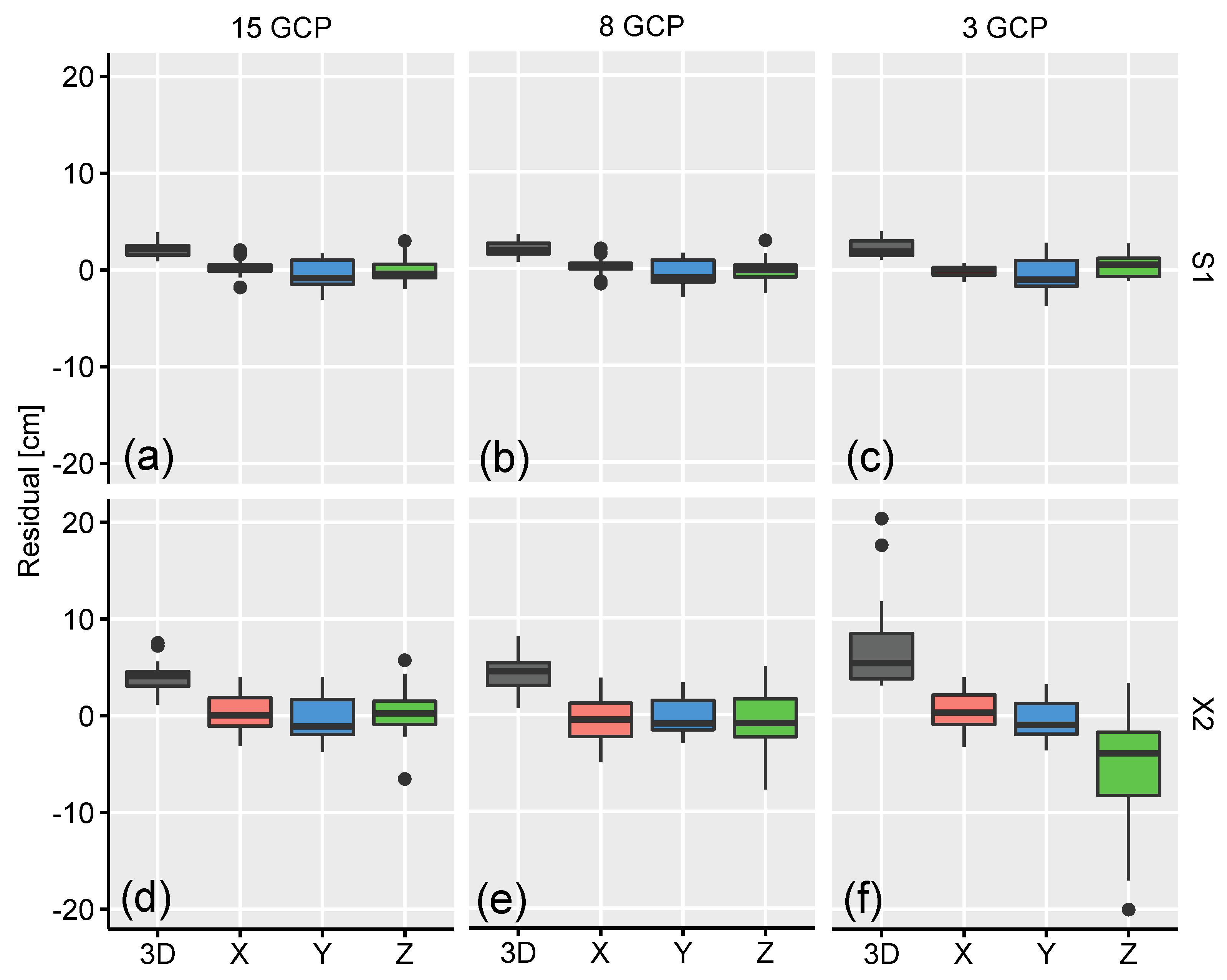
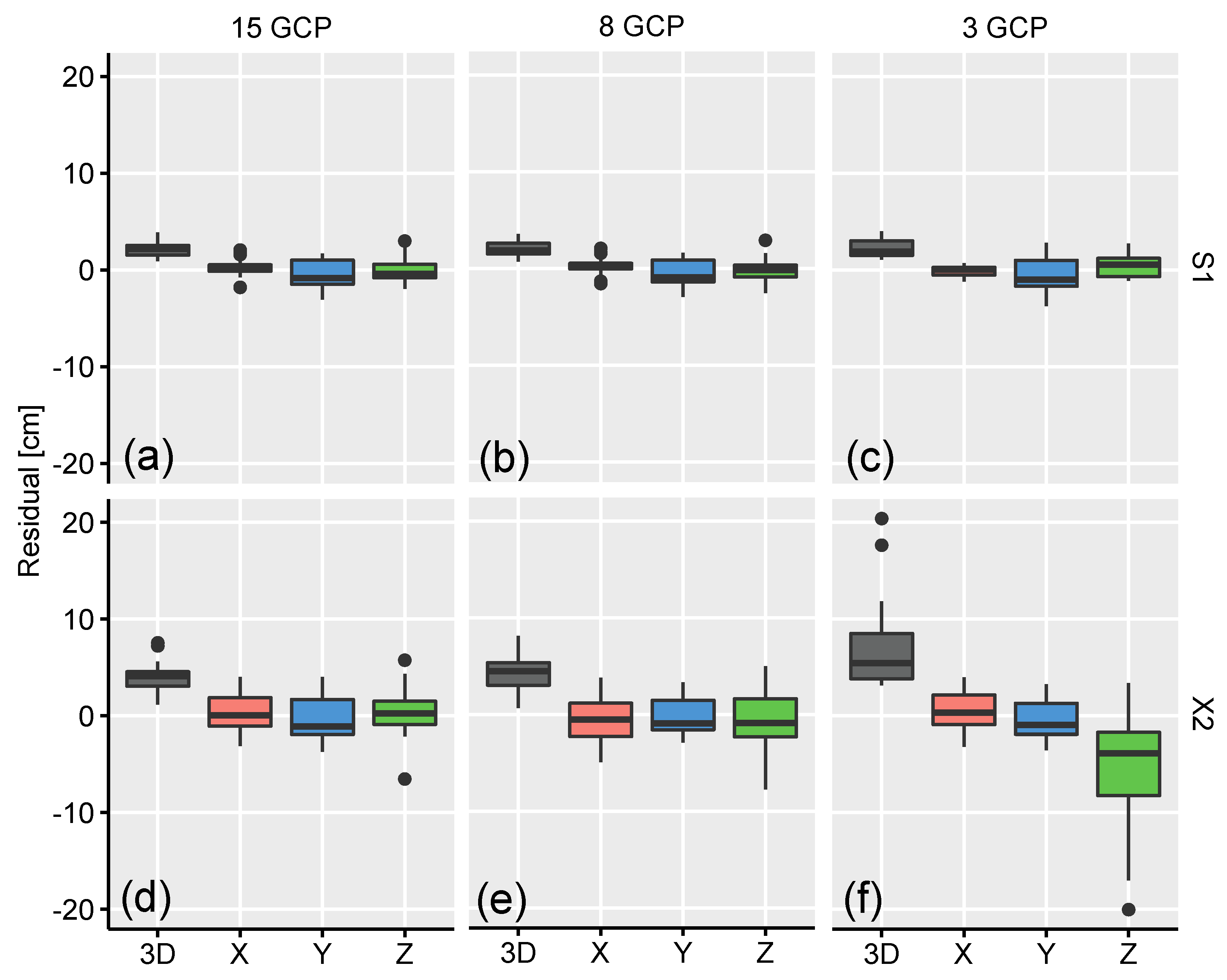
3.2. Assessment of the Effect of the Number and Coordinate Precision of GCPs
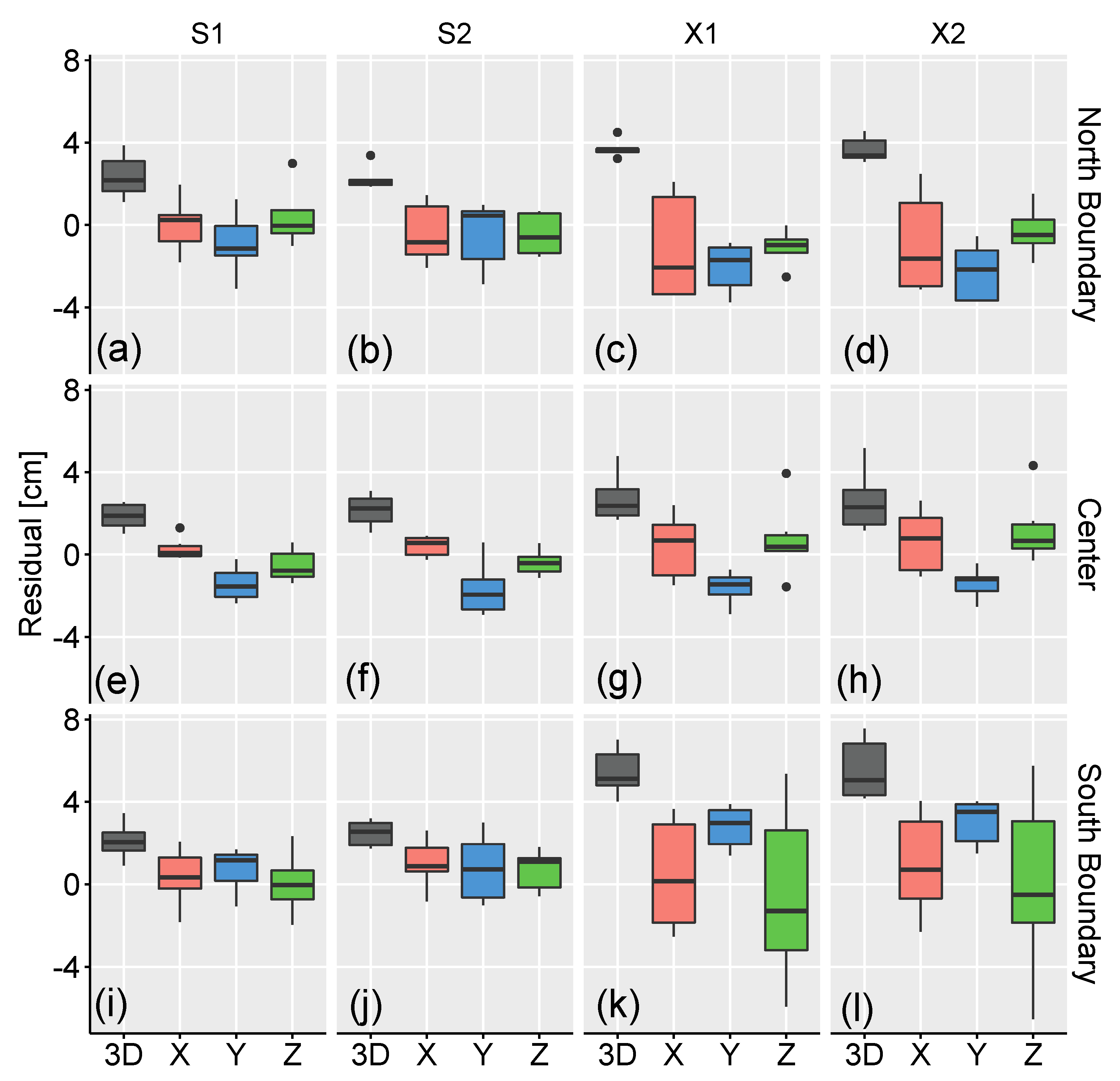
3.3. Assessment of UAV Flight Mode Impact
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CD | Change Detection |
| CoD | Cloud of Difference |
| CORS | Continuously Operating Reference Station |
| CP | Check Point |
| DEM | Digital Elevation Model |
| GSD | Ground Sampling Distance |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| InSAR | Interferometric Synthetic Aperture Radar |
| LiDAR | Light Detection and Ranging |
| M3C2 | Multiscale Model to Model Cloud Comparison |
| NRTK | Network Real-Time Kinematic |
| PPK | Post-Processed Kinematic |
| SfM | Structure-from-Motion |
| UAV | Unmanned Aerial Vehicle (also known as Uncrewed Aerial Vehicle) |
| VHR | Very High Resolution |
References
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef] [Green Version]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection—Approaches and applications. ISPRS J. Photogramm. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. Structure-from-Motion photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: West Sussex, UK, 2016. [Google Scholar]
- Turner, D.; Lucieer, A.; De Jong, S.M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef] [Green Version]
- Gomez, C.; Allouis, T.; Lissak, C.; Hotta, N.; Shinohara, Y.; Hadmoko, D.; Vilimek, V.; Wassmer, P.; Lavigne, F.; Setiawan, A.; et al. High-Resolution Point-Cloud for Landslides in the 21st Century: From Data Acquisition to New Processing Concepts. In Workshop on World Landslide Forum; Springer Nature Switzerland AG: Cham, Switzerland, 2020; pp. 199–213. [Google Scholar]
- Piermattei, L.; Carturan, L.; Blasi, F.d.; Tarolli, P.; Dalla Fontana, G.; Vettore, A.; Pfeifer, N. Suitability of ground-based SfM–MVS for monitoring glacial and periglacial processes. Earth Surf. Dyn. 2016, 4, 425–443. [Google Scholar] [CrossRef] [Green Version]
- De Marco, J.; Carturan, L.; Piermattei, L.; Cucchiaro, S.; Moro, D.; Dalla Fontana, G.; Cazorzi, F. Minor Imbalance of the Lowermost Italian Glacier from 2006 to 2019. Water 2020, 12, 2503. [Google Scholar] [CrossRef]
- Cucchiaro, S.; Cavalli, M.; Vericat, D.; Crema, S.; Llena, M.; Beinat, A.; Marchi, L.; Cazorzi, F. Monitoring topographic changes through 4D-structure-from-motion photogrammetry: Application to a debris-flow channel. Environ. Earth Sci. 2018, 77, 1–21. [Google Scholar] [CrossRef]
- Backes, D.; Smigaj, M.; Schimka, M.; Zahs, V.; Grznárová, A.; Scaioni, M. River Morphology Monitoring of a Small-Scale Alpine Riverbed Using Drone Photogrammetry and LIDAR. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 1017–1024. [Google Scholar] [CrossRef]
- López, J.B.; Jiménez, G.A.; Romero, M.S.; García, E.A.; Martín, S.F.; Medina, A.L.; Guerrero, J.E. 3D modelling in archaeology: The application of Structure from Motion methods to the study of the megalithic necropolis of Panoria (Granada, Spain). J. Archaeol. Sci. Rep. 2016, 10, 495–506. [Google Scholar] [CrossRef]
- Cucchiaro, S.; Fallu, D.J.; Zhao, P.; Waddington, C.; Cockcroft, D.; Tarolli, P.; Brown, A.G. SfM photogrammetry for GeoArchaeology. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 183–205. [Google Scholar]
- Eltner, A.; Sofia, G. Structure from motion photogrammetric technique. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 1–24. [Google Scholar]
- Cucchiaro, S.; Maset, E.; Cavalli, M.; Crema, S.; Marchi, L.; Beinat, A.; Cazorzi, F. How does co-registration affect geomorphic change estimates in multi-temporal surveys? GIScience Remote Sens. 2020, 57, 611–632. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A critical review of automated photogrammetric processing of large datasets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 591–599. [Google Scholar] [CrossRef] [Green Version]
- Cucchiaro, S.; Maset, E.; Fusiello, A.; Cazorzi, F. 4D-SFM photogrammetry for monitoring sediment dynamics in a debris-flow catchment: Software testing and results comparison. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 281–288. [Google Scholar] [CrossRef] [Green Version]
- Goetz, J.; Brenning, A.; Marcer, M.; Bodin, X. Modeling the precision of structure-from-motion multi-view stereo digital elevation models from repeated close-range aerial surveys. Remote Sens. Environ. 2018, 210, 208–216. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- James, M.R.; Antoniazza, G.; Robson, S.; Lane, S.N. Mitigating systematic error in topographic models for geomorphic change detection: Accuracy, precision and considerations beyond off-nadir imagery. Earth Surf. Process. Landf. 2020, 45, 2251–2271. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Bartlett, J.; Frost, C. Reliability, repeatability and reproducibility: Analysis of measurement errors in continuous variables. Ultrasound Obstet. Gynecol. Off. J. Int. Soc. Ultrasound Obstet. Gynecol. 2008, 31, 466–475. [Google Scholar] [CrossRef] [PubMed]
- James, M.R.; Robson, S.; d’Oleire Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Marchi, L.; Cazorzi, F.; Arattano, M.; Cucchiaro, S.; Cavalli, M.; Crema, S. Debris flows recorded in the Moscardo catchment (Italian Alps) between 1990 and 2019. Nat. Hazards Earth Syst. Sci. 2021, 21, 87–97. [Google Scholar] [CrossRef]
- Piermattei, L.; Carturan, L.; Guarnieri, A. Use of terrestrial photogrammetry based on structure-from-motion for mass balance estimation of a small glacier in the Italian alps. Earth Surf. Process. Landf. 2015, 40, 1791–1802. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Manfreda, S.; Dvorak, P.; Mullerova, J.; Herban, S.; Vuono, P.; Arranz Justel, J.J.; Perks, M. Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems. Drones 2019, 3, 15. [Google Scholar] [CrossRef] [Green Version]
- Oniga, V.E.; Breaban, A.I.; Pfeifer, N.; Chirila, C. Determining the suitable number of ground control points for UAS images georeferencing by varying number and spatial distribution. Remote Sens. 2020, 12, 876. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry—merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- Maset, E.; Magri, L.; Toschi, I.; Fusiello, A. Bundle Block Adjustment with Constrained Relative Orientations. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2, 49–55. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Model | Company | Resolution [MP] | Sensor Dimension [mm] | Focal Length [mm] | Image Resolution [px] |
|---|---|---|---|---|---|
| 5000 | SONY | 20.0 | 15.4 × 23.2 | 20 | 5456 × 3632 |
| X5S | DJI | 20.8 | 17.3 × 13 | 25 | 5280 × 3956 |
| Study Site | Camera | Dataset | Date | Drone | Flight Mode | Flight Altitude [m a.g.l.] | Images | GCPs | CPs | GSD [mm/px] |
|---|---|---|---|---|---|---|---|---|---|---|
| P | S | P_S1 | 13 June 2020 | NT4 | Mnl | 25 | 167 | 15 | 17 | 7 |
| S | P_S2 | 13 June 2020 | NT4 | Mnl | 25 | 150 | 15 | 17 | 7 | |
| X | P_X1 | 13 June 2020 | MT | Pln | 25 | 161 | 15 | 17 | 5 | |
| X | P_X2 | 13 June 2020 | MT | Pln | 25 | 169 | 15 | 17 | 5 | |
| V | S | V_S1_2019 | 16 December 2019 | NT4 | Mnl | 35 | 217 | 15 | 15 | 10 |
| S | V_S2_2019 | 16 December 2019 | NT4 | Mnl | 35 | 167 | 15 | 15 | 10 | |
| S | V_S1 | 17 December 2020 | MT | Pln | 35 | 281 | 15 | 16 | 10 | |
| S | V_S2 | 17 December 2020 | MT | Pln | 35 | 285 | 15 | 16 | 10 | |
| X | V_X1 | 17 December 2020 | MT | Pln | 35 | 191 | 15 | 16 | 8 | |
| X | V_X2 | 17 December 2020 | MT | Pln | 35 | 191 | 15 | 16 | 8 | |
| M | S | M_S1 | 10 June 2019 | NT4 | Mnl | 25 | 155 | 14 | 12 | 7 |
| S | M_S2 | 10 June 2019 | NT4 | Mnl | 25 | 142 | 14 | 12 | 7 | |
| X | M_X1 | 12 June 2020 | MT | Pln | 25 | 197 | 15 | 14 | 5 | |
| X | M_X2 | 12 June 2020 | MT | Pln | 25 | 199 | 15 | 14 | 5 |
| Study Site | Dataset | f [px] | [px] | [px] | [–] | [–] | [] | [] | [] | [] | [] | [] | Reprj. err. [px] | GSD [mm/px] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| P | P_S1 | 4780.6 | −24.0 | 2.7 | −0.28 | −0.23 | −15.2 | 11.4 | 5.1 | −3.6 | −0.8 | 0.7 | 0.66 | 9 |
| P_S1_8_GCP | 4791.4 | −24.0 | 2.5 | −0.28 | −0.19 | −15.2 | 11.6 | 5.1 | −3.6 | −0.8 | 0.7 | 0.67 | 9 | |
| P_S1_3_GCP | 4791.2 | −24.0 | 2.5 | −0.28 | −0.19 | −15.2 | 11.6 | 5.1 | −3.6 | −0.8 | 0.7 | 0.67 | 9 | |
| P_S2 | 4818.8 | −24.2 | 0.3 | −0.28 | 0.83 | −15.5 | 11.7 | 5.6 | −3.7 | −0.2 | 1.2 | 0.72 | 10 | |
| P_X1 | 4459.0 | 46.7 | 18.9 | −6.66 | 0.3 | 0.6 | −4.5 | 12.9 | −10.9 | 2.3 | 1.0 | 0.85 | 5 | |
| P_X2 | 4385.1 | 50.4 | 18.9 | −6.93 | 0.44 | 0.5 | −3.9 | 10.9 | −9.1 | 2.2 | 0.9 | 0.82 | 5 | |
| P_X2_8_GCP | 4378.1 | 49.8 | 18.9 | −7.31 | 0.46 | 0.6 | −4.5 | 12.4 | −10.3 | 2.2 | 0.9 | 0.76 | 5 | |
| P_X2_3_GCP | 4383.5 | 49.6 | 18.8 | −7.42 | 0.46 | 0.8 | −4.5 | 12.6 | −10.5 | 2.2 | 0.9 | 0.76 | 5 | |
| P_X2_PE1 | 4396.9 | 49.3 | 18.7 | −7.42 | 0.48 | 0.6 | −4.5 | 12.7 | −10.6 | 2.2 | 0.9 | 0.76 | 5 | |
| P_X2_PE2 | 4400.5 | 49.2 | 18.6 | −7.42 | 0.48 | 0.6 | −4.6 | 12.8 | −10.7 | 2.2 | 0.9 | 0.76 | 5 | |
| V | V_S1_2019 | 4814.8 | −12.6 | 3.9 | −0.28 | 1.08 | −15.8 | 13.3 | 1.6 | 0.1 | −0.7 | 1.1 | 0.70 | 7 |
| V_S2_2019 | 4809.9 | −11.2 | 3.4 | −0.28 | 0.27 | −15.4 | 11.4 | 7.1 | −5.7 | −0.4 | 1.5 | 0.69 | 8 | |
| V_S1 | 4801.7 | −25.6 | 7.3 | −0.28 | −0.33 | −15.4 | 11.3 | 6.8 | −5.3 | −0.6 | 1.1 | 0.69 | 7 | |
| V_S2 | 4781.6 | −33.7 | −19.8 | −0.28 | 0.83 | −15.2 | 11.0 | 7.0 | −5.5 | −0.6 | 1.1 | 0.69 | 7 | |
| V_X1 | 4526.2 | 43.8 | 4.6 | −7.06 | −0.17 | −0.2 | −0.2 | 2.1 | −1.0 | 2.3 | 0.4 | 0.91 | 7 | |
| V_X2 | 4578.9 | 39.9 | 5.2 | −7.72 | 0.47 | −0.5 | 0.2 | 0.6 | 0.9 | 2.1 | 0.4 | 0.87 | 7 | |
| M | M_S1 | 4812.5 | −25.0 | 4.9 | −0.28 | 0.83 | −15.5 | 13.2 | 1.3 | 0.1 | −0.8 | 1.0 | 1.22 | 8 |
| M_S2 | 4808.4 | −26.2 | 12.7 | −0.28 | 0.83 | −15.7 | 13.7 | 0.5 | 0.1 | −0.7 | 0.4 | 1.24 | 7 | |
| M_X1 | 4543.2 | 42.8 | 15.0 | −5.52 | −1.93 | −0.03 | −1.3 | 5.0 | −4.3 | 2.2 | 0.9 | 0.92 | 6 | |
| M_X2 | 4541.2 | 43.1 | 14.4 | −6.54 | −1.47 | −0.1 | −0.3 | 1.1 | 0.3 | 2.2 | 0.8 | 0.88 | 6 |
| Study Site | Dataset | [cm] | [cm] | [cm] | [cm] | [cm] | [cm] | [cm] | [cm] | [GSD] | [GSD] |
|---|---|---|---|---|---|---|---|---|---|---|---|
| P | P_S1 | 0.2 | 1.1 | −0.5 | 1.5 | 0.0 | 1.3 | 2.1 | 0.8 | 2.4 | 1.0 |
| P_S1_8_GCP | 0.3 | 1.0 | −0.6 | 1.4 | −0.1 | 1.2 | 2.0 | 0.8 | 2.3 | 1.0 | |
| P_S1_3_GCP | −0.2 | 0.6 | −0.5 | 2.0 | 0.5 | 1.2 | 2.2 | 0.9 | 2.5 | 1.1 | |
| P_S2 | 0.4 | 1.2 | −0.5 | 1.8 | 0.0 | 1.0 | 2.3 | 0.7 | 2.2 | 0.6 | |
| P_X1 | 0.0 | 2.3 | −0.2 | 2.5 | −0.3 | 2.8 | 4.0 | 1.5 | 7.1 | 2.7 | |
| P_X2 | 0.3 | 2.2 | −0.1 | 2.6 | 0.4 | 2.8 | 4.0 | 1.8 | 7.7 | 3.5 | |
| P_X2_8_GCP | −0.5 | 2.5 | −0.2 | 2.0 | −0.6 | 3.4 | 4.3 | 1.8 | 8.3 | 3.6 | |
| P_X2_3_GCP | 0.5 | 2.3 | −0.4 | 2.3 | −5.0 | 6.6 | 7.3 | 5.0 | 14.1 | 9.8 | |
| P_X2_PE1 | 0.2 | 2.3 | −0.1 | 2.4 | 0.1 | 3.0 | 4.0 | 1.7 | 7.8 | 3.3 | |
| P_X2_PE2 | 0.4 | 2.3 | −0.3 | 2.3 | 0.2 | 2.9 | 4.0 | 1.6 | 7.7 | 3.2 | |
| V | V_S1_2019 | −0.1 | 1.1 | 0.0 | 1.3 | 0.4 | 1.1 | 1.8 | 0.8 | 2.7 | 1.3 |
| V_S2_2019 | −0.6 | 2.0 | −0.1 | 1.4 | 0.3 | 1.2 | 2.5 | 1.0 | 3.1 | 1.3 | |
| V_S1 | −0.1 | 0.8 | −0.1 | 0.6 | −0.7 | 1.4 | 1.5 | 1.0 | 2.1 | 1.5 | |
| V_S2 | 0.0 | 0.8 | −0.2 | 0.6 | −0.2 | 0.9 | 1.2 | 0.6 | 1.8 | 0.9 | |
| V_X1 | 0.3 | 1.6 | −0.2 | 0.9 | 0.1 | 1.7 | 2.0 | 1.6 | 2.7 | 2.1 | |
| V_X2 | −0.1 | 1.0 | −0.1 | 0.9 | −0.9 | 1.8 | 2.1 | 0.9 | 2.9 | 1.3 | |
| M | M_S1 | 0.6 | 0.8 | −0.3 | 0.6 | 0.2 | 1.5 | 1.8 | 0.5 | 2.2 | 0.6 |
| M_S2 | 0.4 | 0.7 | −0.4 | 0.7 | 0.9 | 1.6 | 1.9 | 0.9 | 2.8 | 1.3 | |
| M_X1 | 0.5 | 0.9 | −0.3 | 0.5 | −0.3 | 1.9 | 1.9 | 1.2 | 3.2 | 2.1 | |
| M_X2 | 0.4 | 0.8 | −0.3 | 0.5 | −0.1 | 1.8 | 1.7 | 1.1 | 2.8 | 1.8 |
| Study Site | Reference Set | Compared Set | [cm] | RMS [cm] |
|---|---|---|---|---|
| P | P_S1 | P_S2 | −0.1 ± 1.3 | 1.3 |
| P_X2 | P_X1 | −0.6 ± 0.8 | 1.0 | |
| P_S1 | P_X2 | 0.4 ± 2.6 | 2.6 | |
| P_S1 | P_S1_3_GCP | 0.3 ± 0.8 | 0.9 | |
| P_S1 | P_S1_8_GCP | −0.1 ± 0.3 | 0.3 | |
| P_X2 | P_X2_3_GCP | −6.0 ± 8.3 | 10.3 | |
| P_X2 | P_X2_8_GCP | −0.7 ± 1.0 | 1.2 | |
| P_X2 | P_X2_PE1 | −0.2 ± 0.5 | 0.6 | |
| P_X2 | P_X2_PE2 | −0.2 ± 0.8 | 0.8 | |
| V | V_S1_2019 | V_S2_2019 | 0.5 ± 1.2 | 1.3 |
| V_S1 | V_S2 | 0.6 ± 0.7 | 1.0 | |
| V_X1 | V_X2 | −1.7 ± 1.3 | 2.1 | |
| V_S1 | V_X2 | 0.2 ± 1.5 | 1.5 | |
| M | M_S1 | M_S2 | −0.6 ± 1.2 | 1.4 |
| M_X1 | M_X2 | 0.1 ± 0.5 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Marco, J.; Maset, E.; Cucchiaro, S.; Beinat, A.; Cazorzi, F. Assessing Repeatability and Reproducibility of Structure-from-Motion Photogrammetry for 3D Terrain Mapping of Riverbeds. Remote Sens. 2021, 13, 2572. https://doi.org/10.3390/rs13132572
De Marco J, Maset E, Cucchiaro S, Beinat A, Cazorzi F. Assessing Repeatability and Reproducibility of Structure-from-Motion Photogrammetry for 3D Terrain Mapping of Riverbeds. Remote Sensing. 2021; 13(13):2572. https://doi.org/10.3390/rs13132572
Chicago/Turabian StyleDe Marco, Jessica, Eleonora Maset, Sara Cucchiaro, Alberto Beinat, and Federico Cazorzi. 2021. "Assessing Repeatability and Reproducibility of Structure-from-Motion Photogrammetry for 3D Terrain Mapping of Riverbeds" Remote Sensing 13, no. 13: 2572. https://doi.org/10.3390/rs13132572
APA StyleDe Marco, J., Maset, E., Cucchiaro, S., Beinat, A., & Cazorzi, F. (2021). Assessing Repeatability and Reproducibility of Structure-from-Motion Photogrammetry for 3D Terrain Mapping of Riverbeds. Remote Sensing, 13(13), 2572. https://doi.org/10.3390/rs13132572