
Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution




Abstract
:1. Introduction
- -
- the position of the GNSS satellite is corrected with SBAS corrections;
- -
- the GNSS satellite clock error is corrected with SBAS corrections;
- -
- the ionospheric delay is determined from the SBAS model [8];
- -
2. Related Works
- -
- the use of the SBAS solution in UAV technology to perform VLOS (visual line of sight) and BVLOS (beyond visual line of sight) flights [12];
- -
- the determination of SBAS EGNOS (European Geostationary Navigation Overlay Service) positioning reliability for UAV technology [13];
- -
- the implementation of the SBAS solution in aviation operations performed in circumpolar zones with the use of UAV technology [14];
- -
- the application of SBAS solutions for RPAS systems (Remotely Piloted Aircraft Systems) [15];
- -
- -
- -
- the use of the SBAS solution for precise UAV positioning in real-time and post-processing mode [21];
- -
- -
- the UAV positioning using SBAS corrections as part of the PBN (performance-based navigation) navigation concept [24].
- -
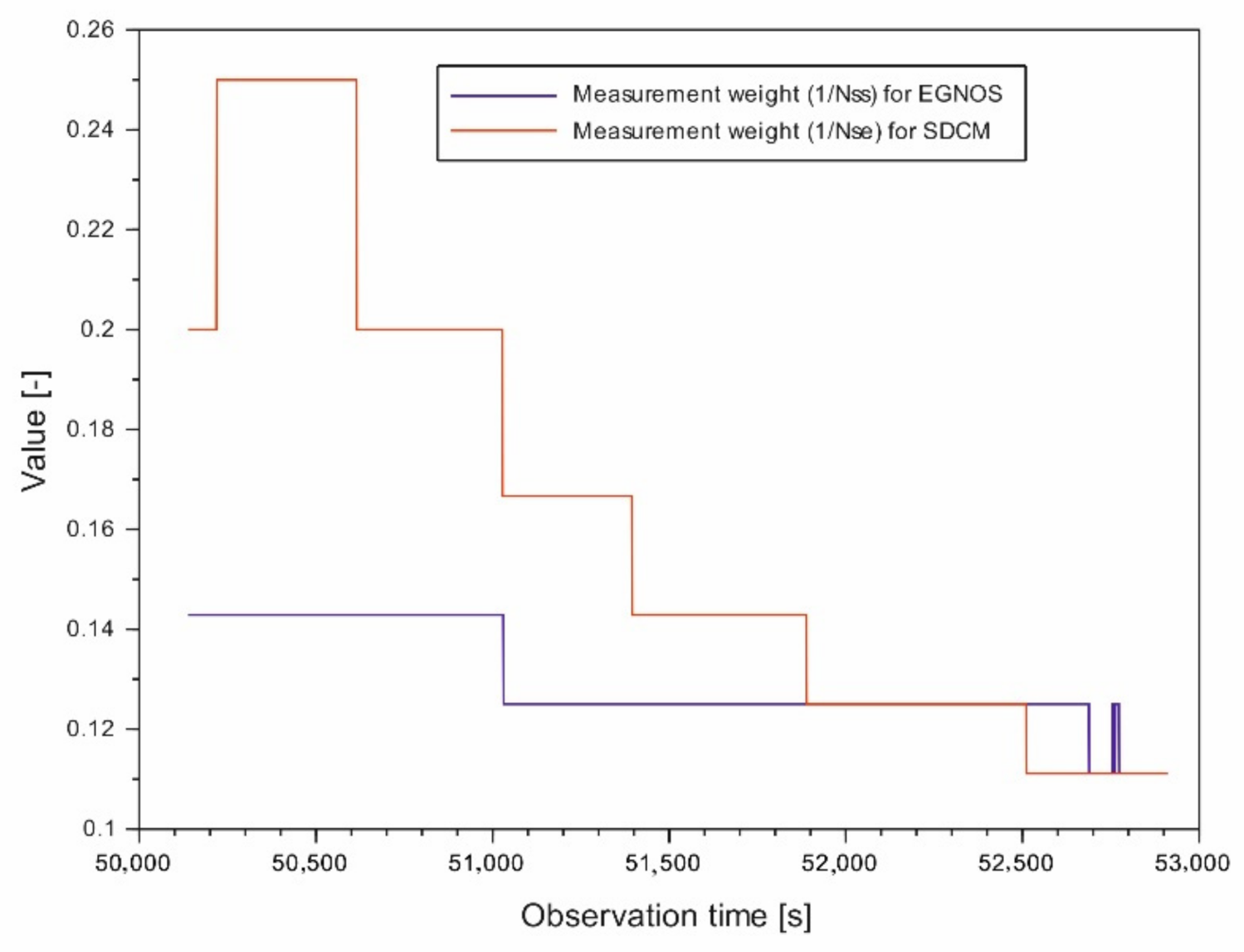
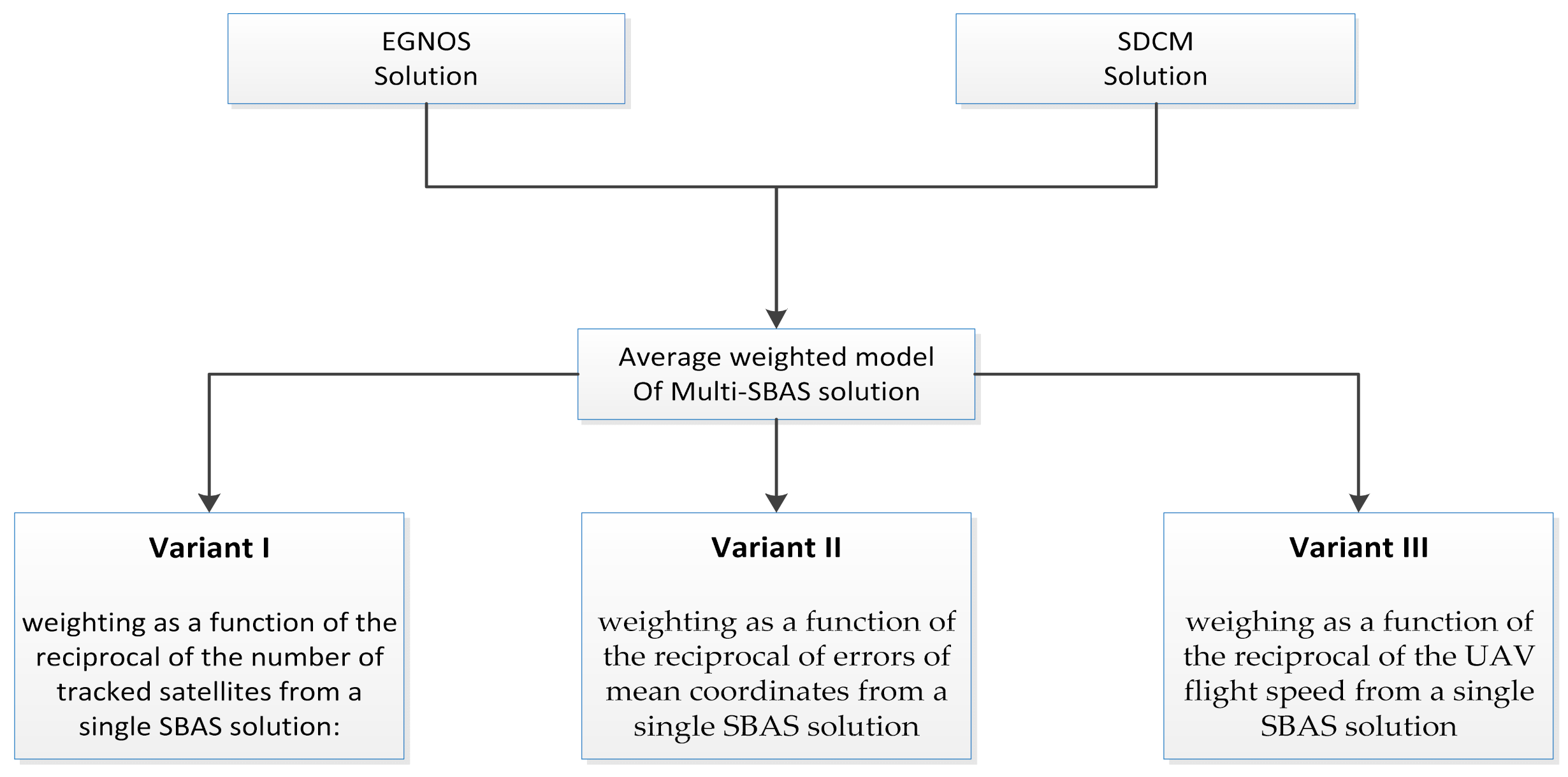
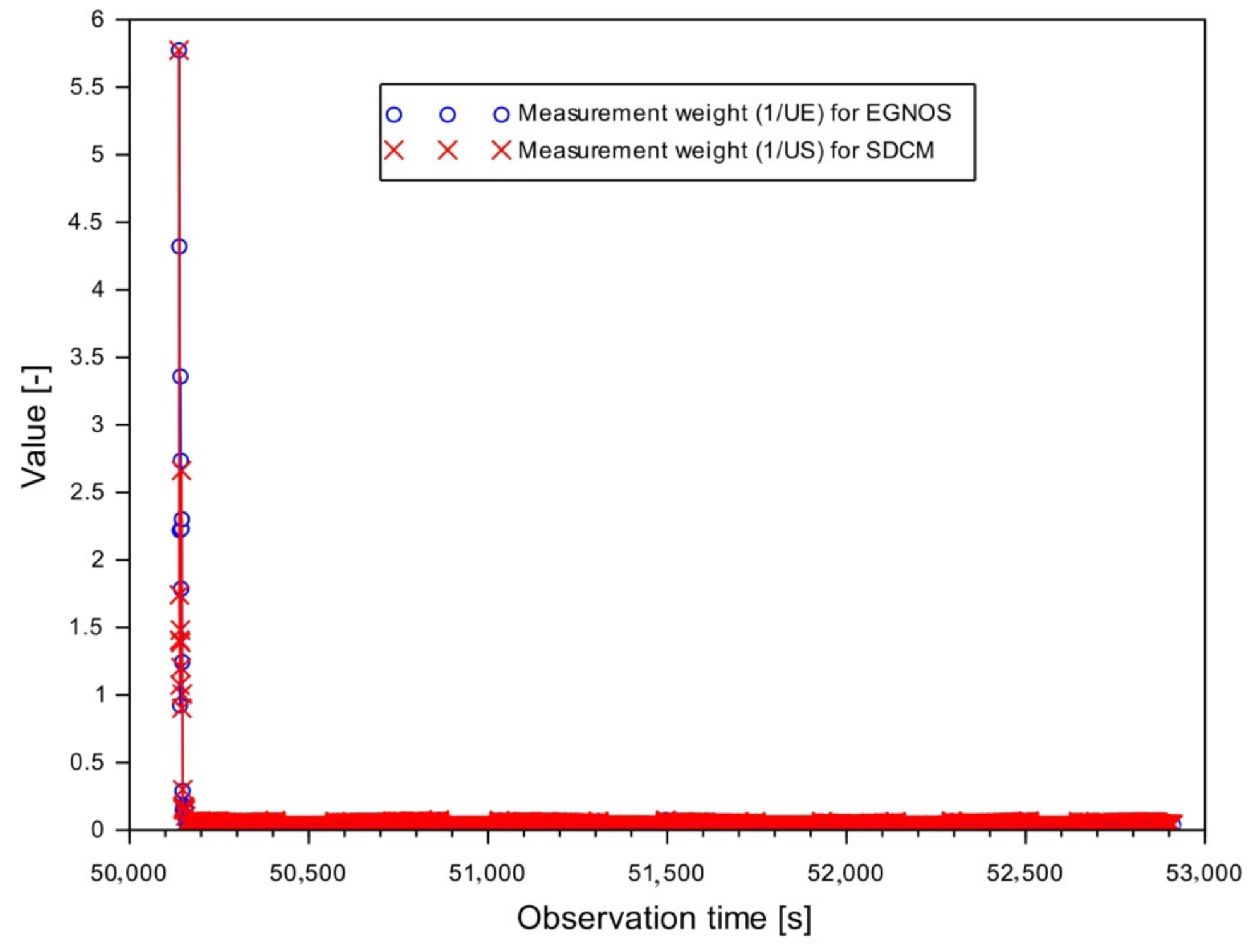
- the reciprocal of the number of tracked satellites from a single SBAS solution;
- -
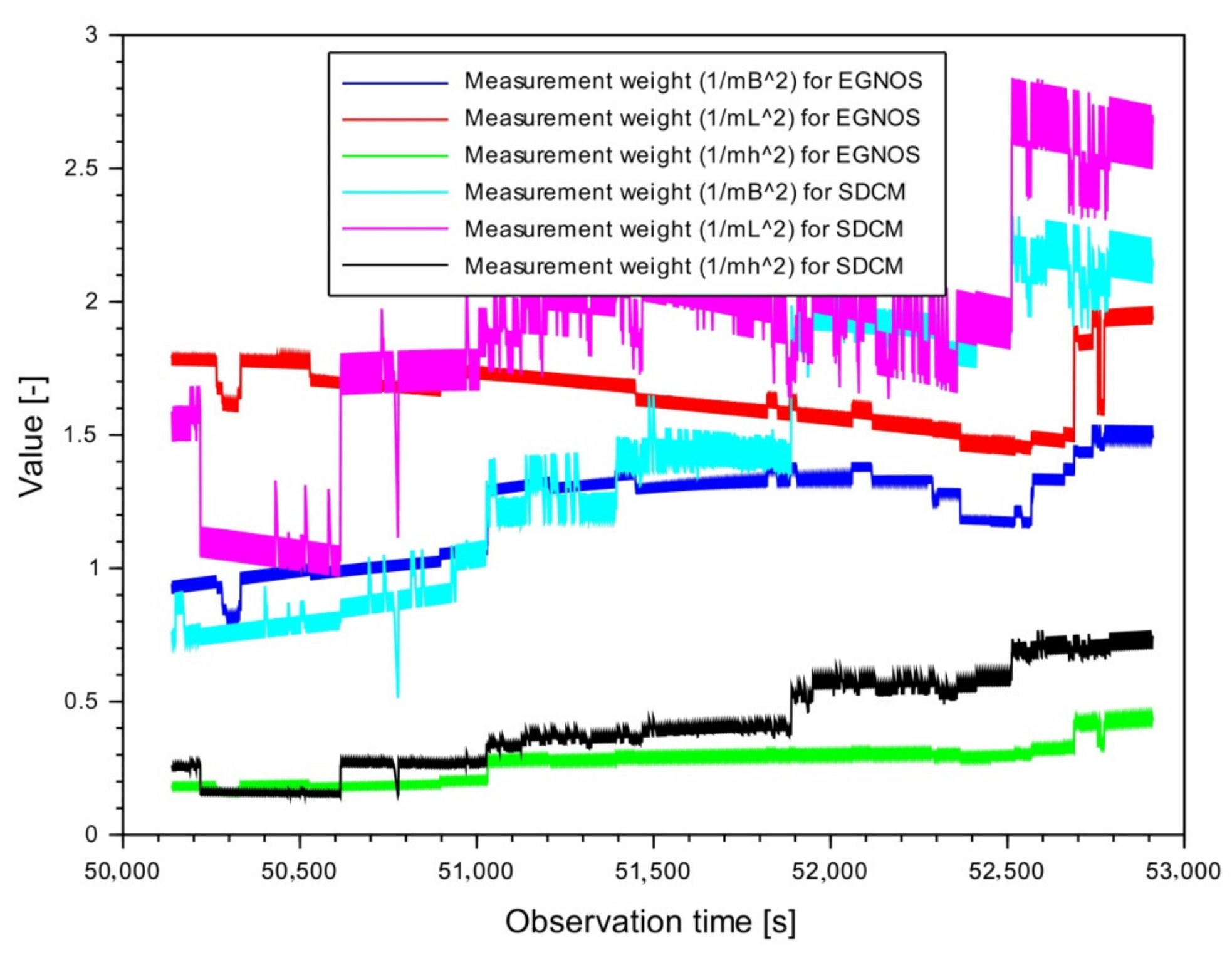
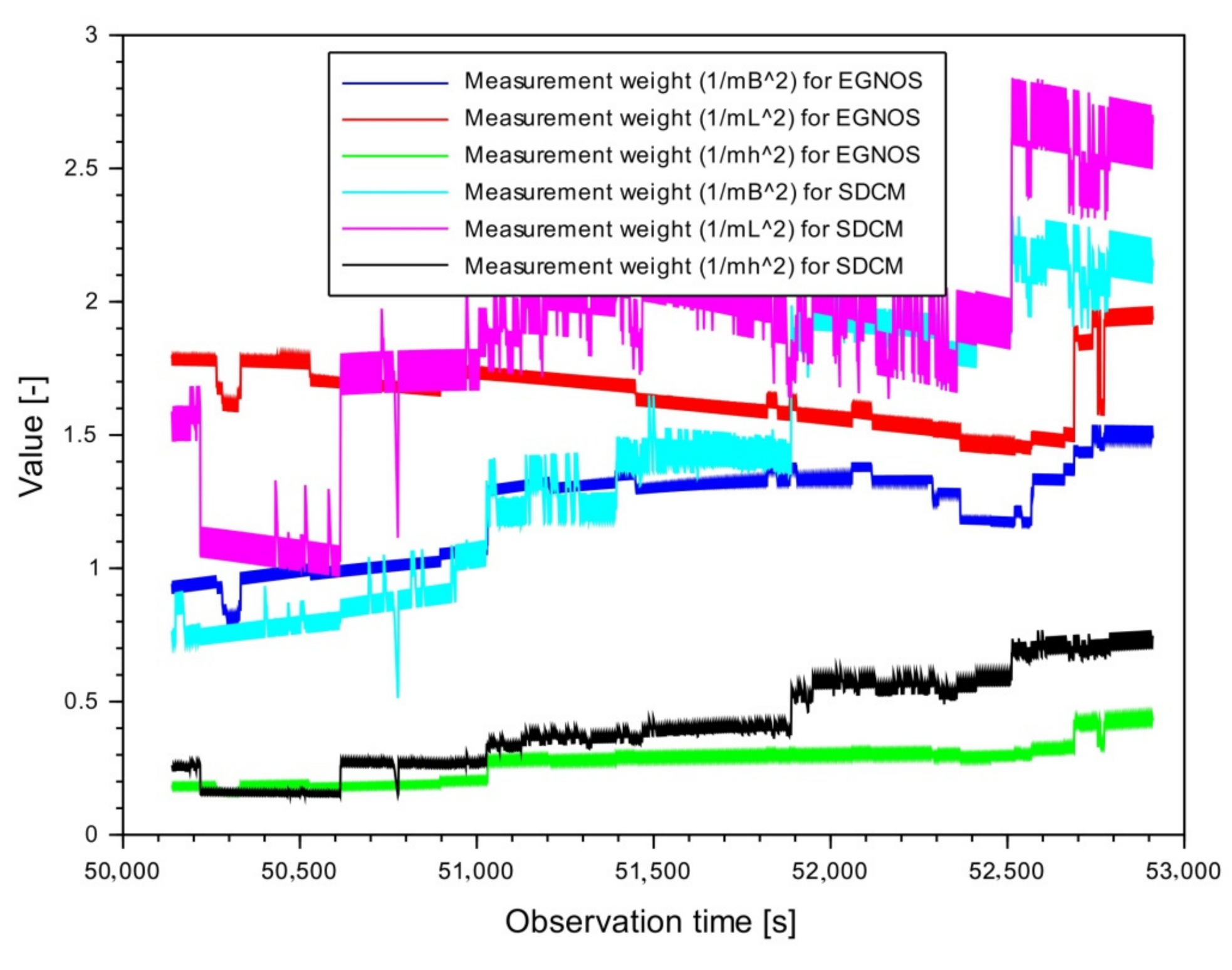
- the inverse of the square of the mean coordinate errors from a single SBAS solution;
- -
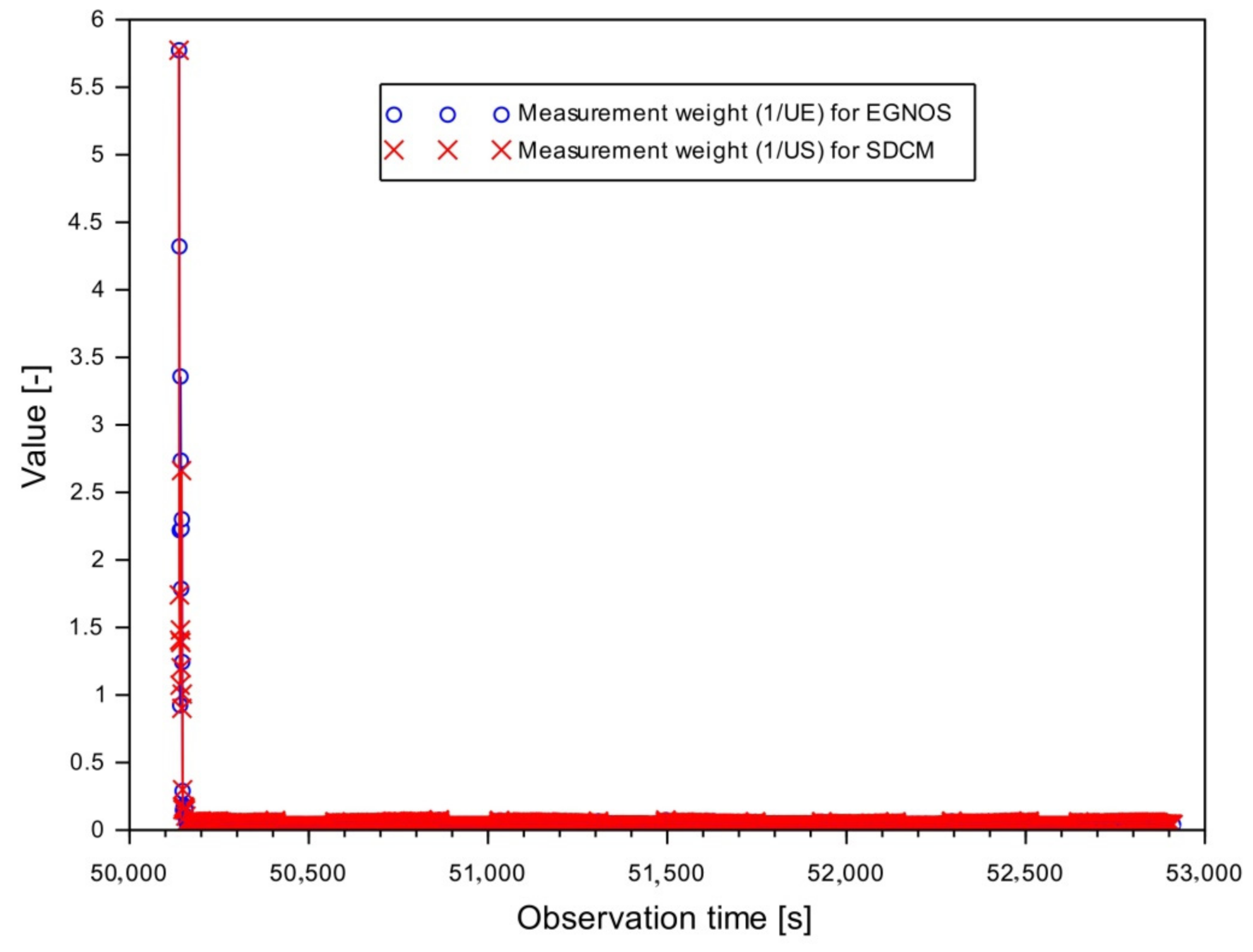
- the reciprocal of the UAV flight speed from a single SBAS solution.
- -
- development of a new linear combination model for the combination of a single SBAS solution from EGNOS and SDCM systems;
- -
- implementation of various weighing variants in order to optimize the calculation process and selection of the best method to improve the positioning accuracy of the multi-SBAS;
- -
- development of algorithms for assessing internal and external accuracy;
- -
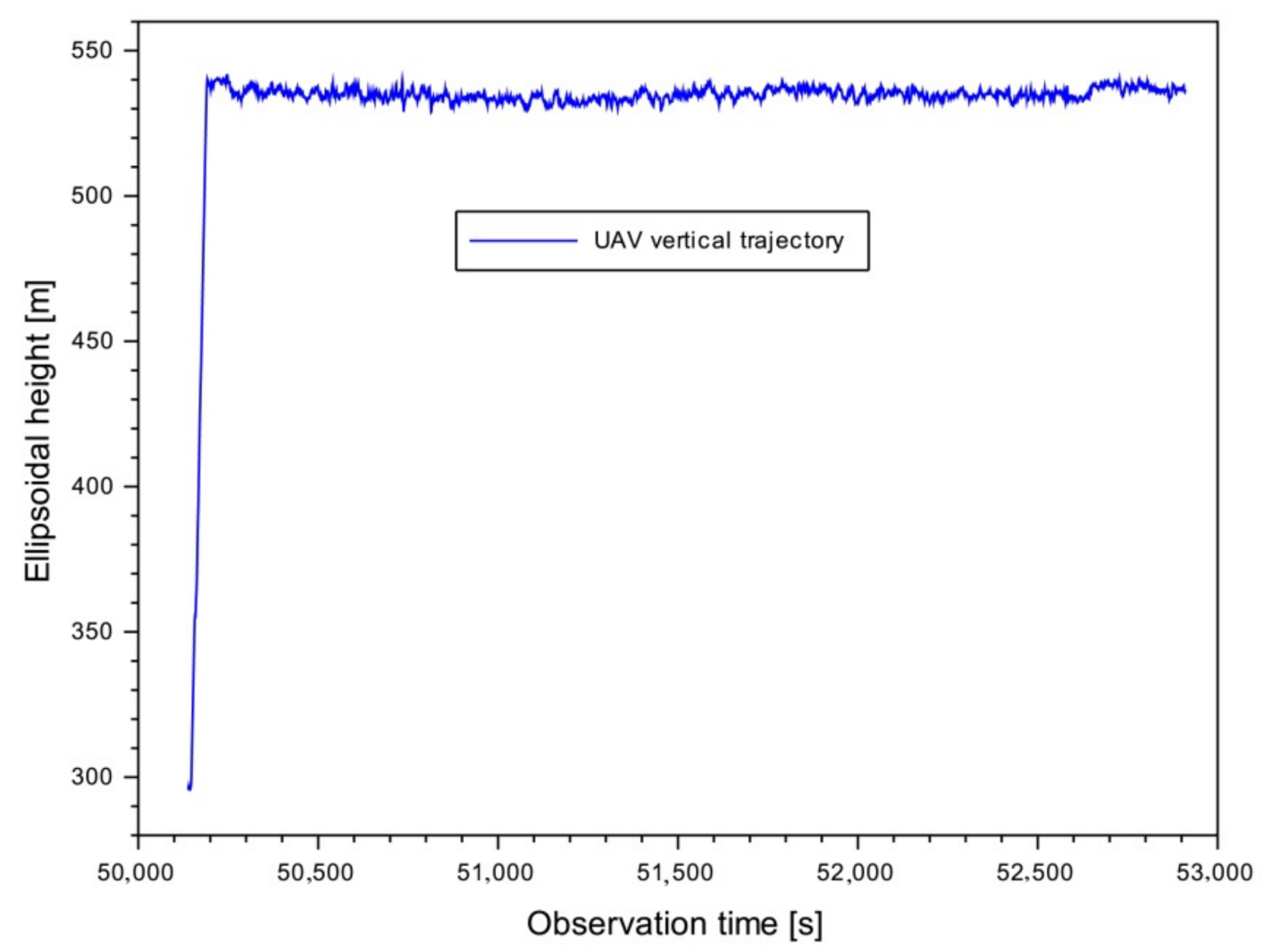
- research on improving the determination of the vertical h component for the UAV flight.
3. Research Method
- -
- reciprocal of the number of tracked satellites from a single SBAS solution;
- -
- the inverse of the square of the mean coordinate errors from a single SBAS solution;
- -
- the reciprocal of the UAV flight speed from a single SBAS solution.
- -
- corrections along each axis of BLh components;
- -
- the mean error of the resultant UAV position;
- -
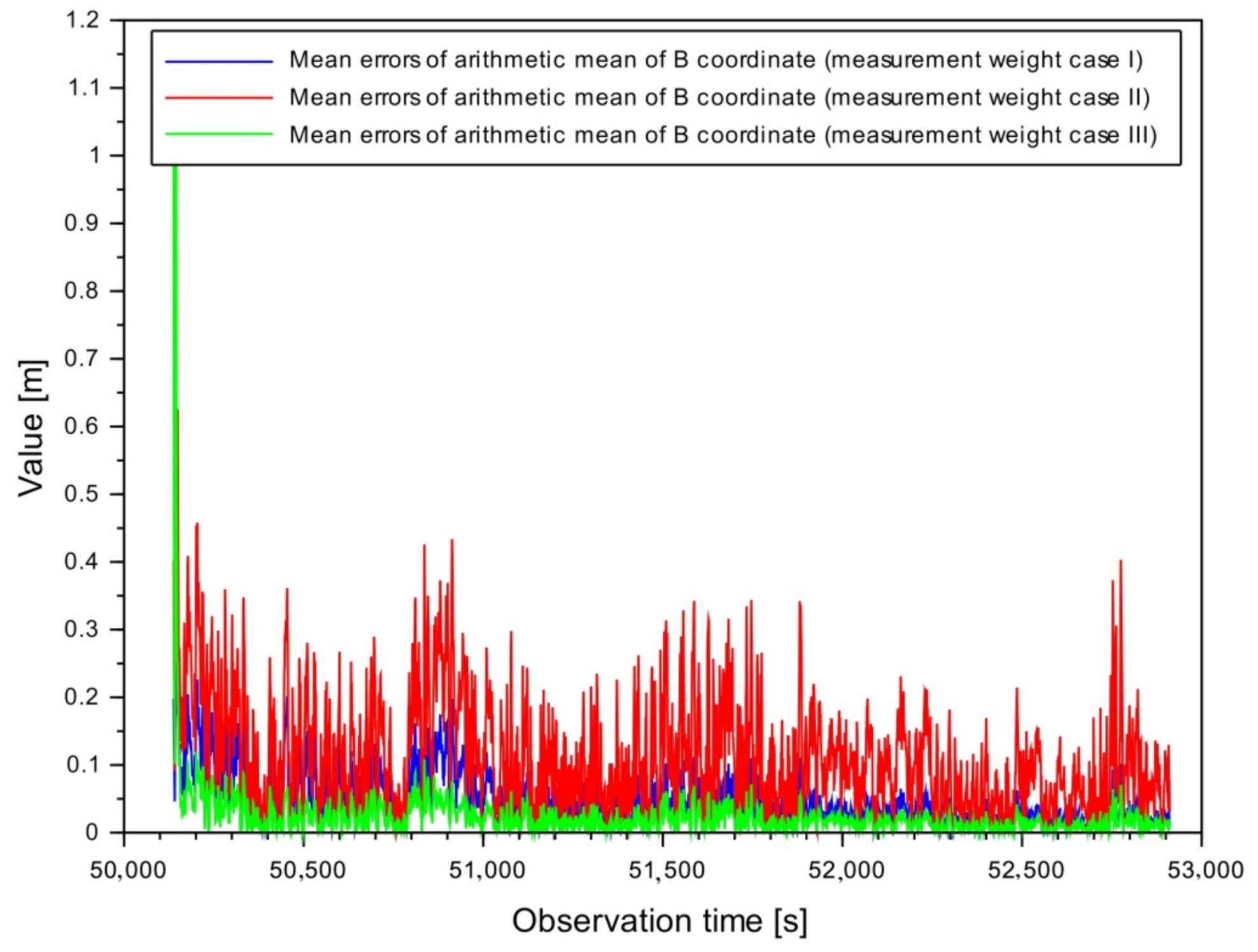
- the mean error of the arithmetic means for the resultant UAV position.
- (I)
- corrections along each axis of BLh components:where:
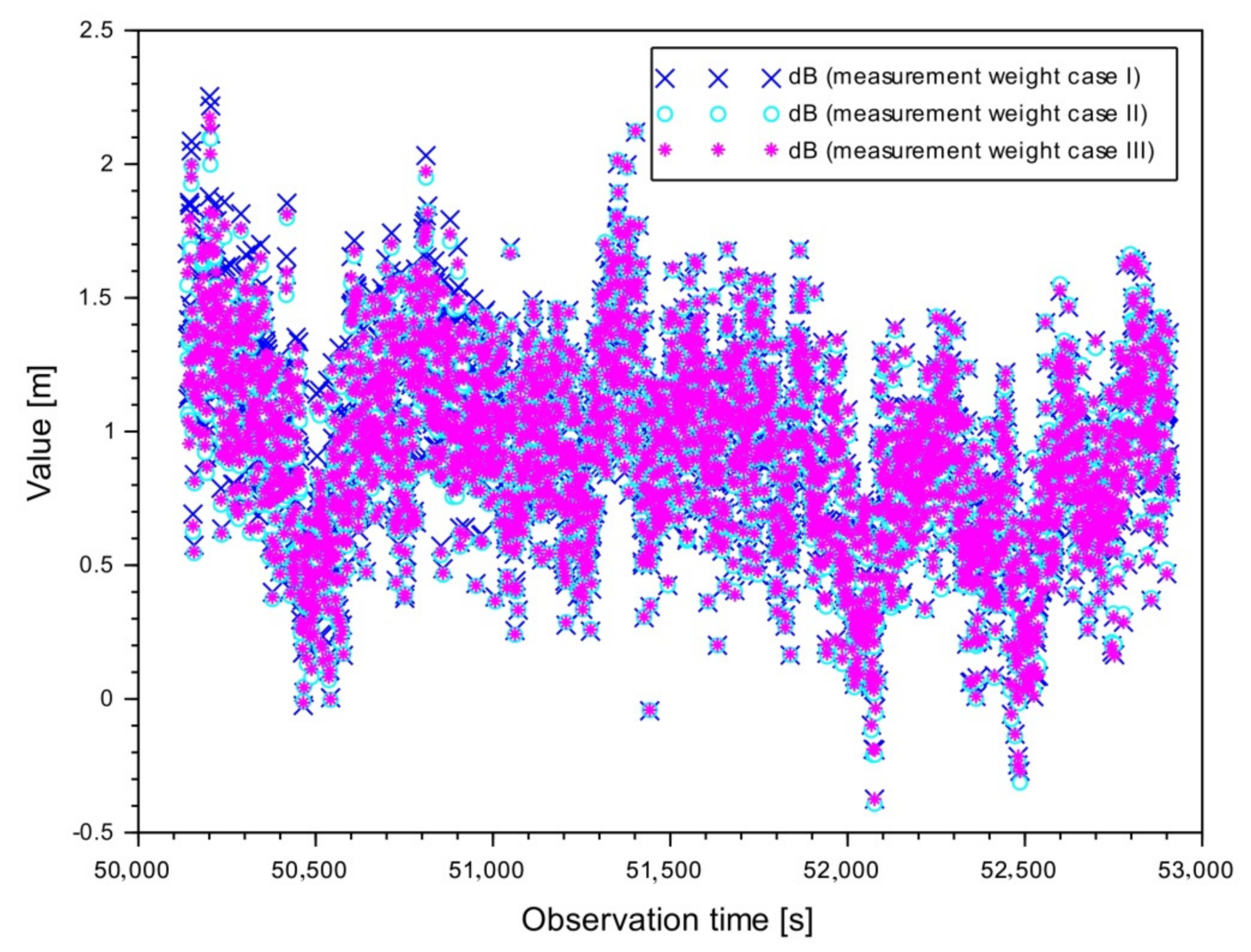
- —corrections along the B axis;
- —corrections along the L axis;
- —corrections along the h axis.
- (II)
- mean error of the resultant UAV position:where:
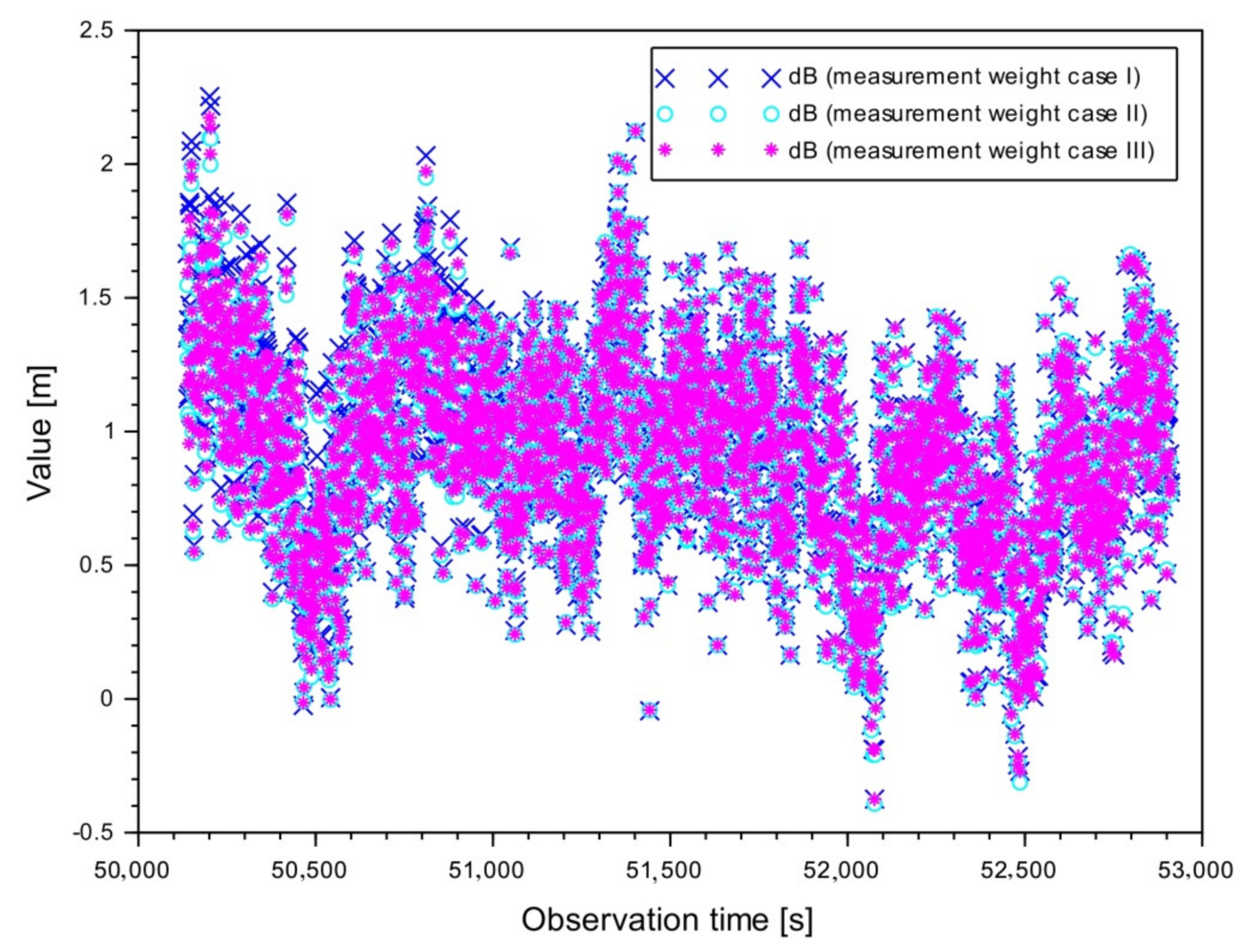
- —mean error for the resultant component B;
- —mean error for the resultant component L;
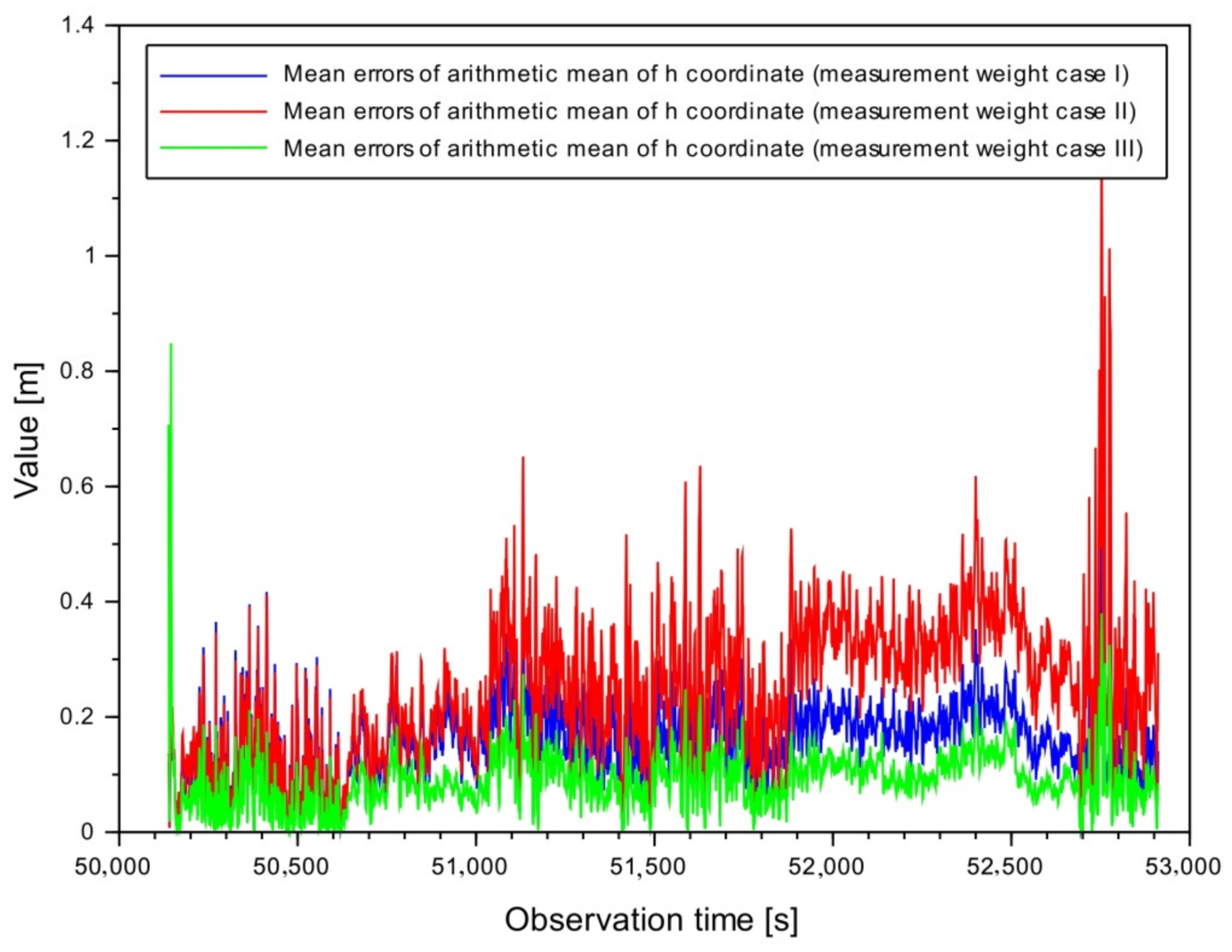
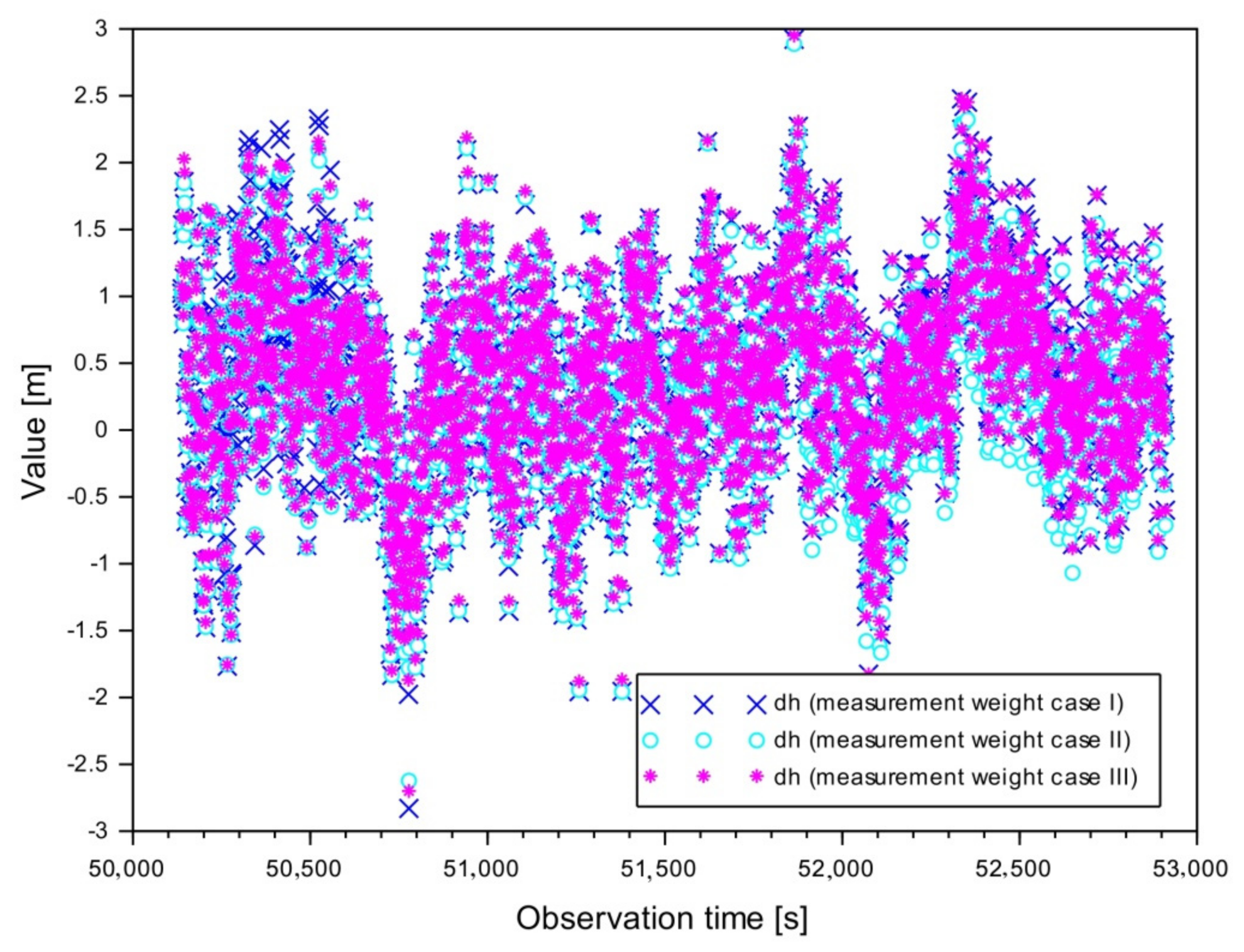
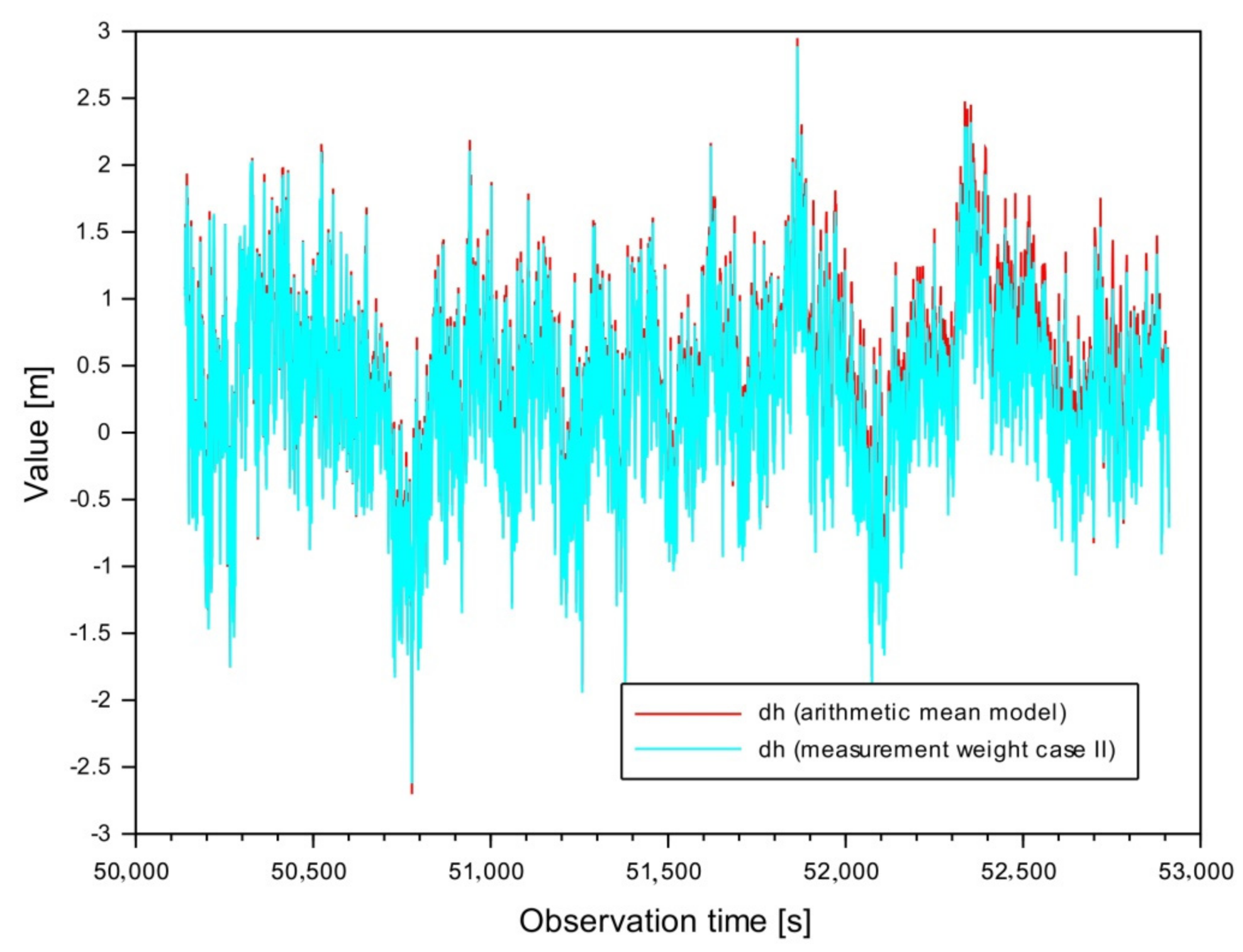
- —mean error for the resultant h component;
- —number of independent positioning,.
- (III)
- the mean error of the arithmetic mean for the resultant UAV position:where:
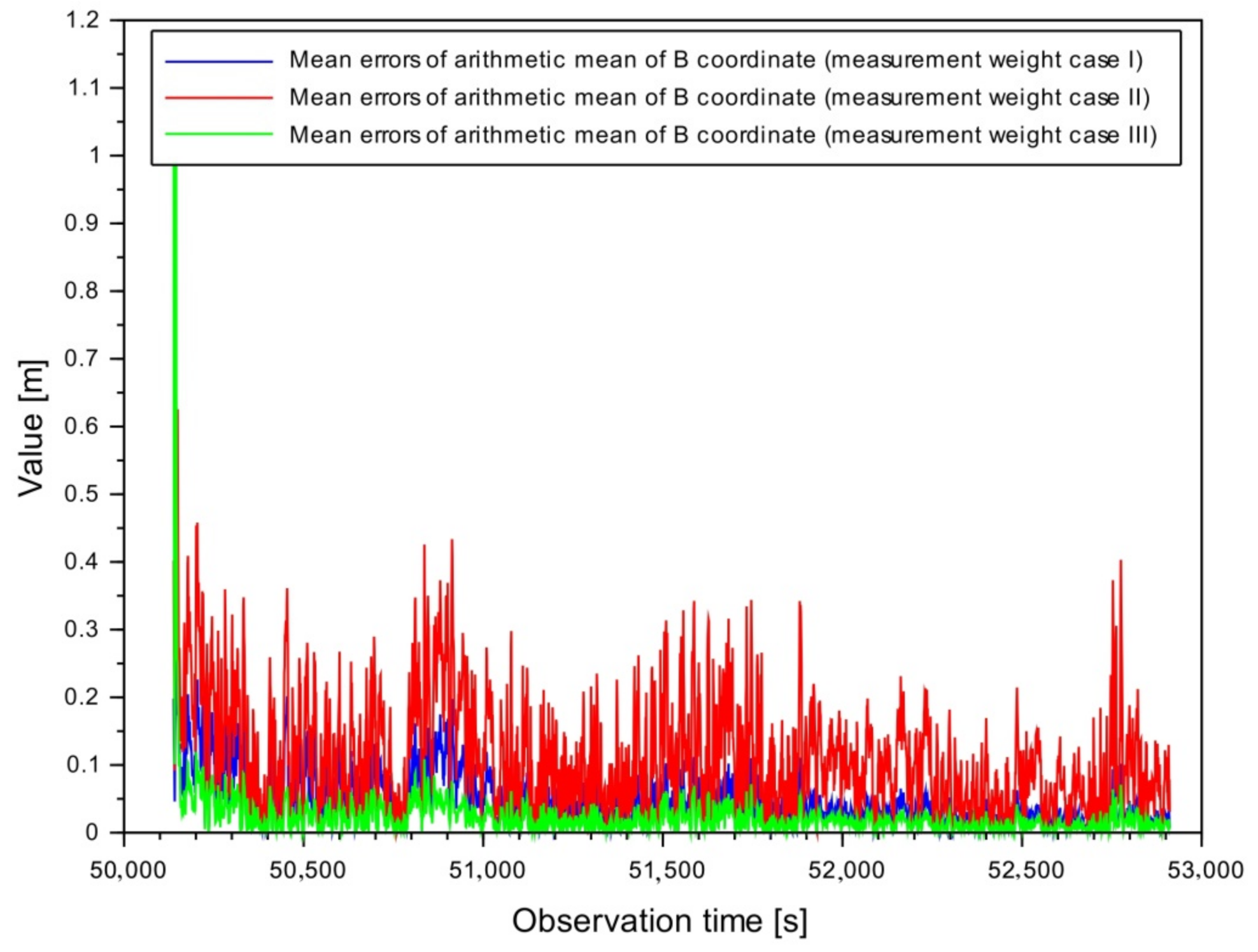
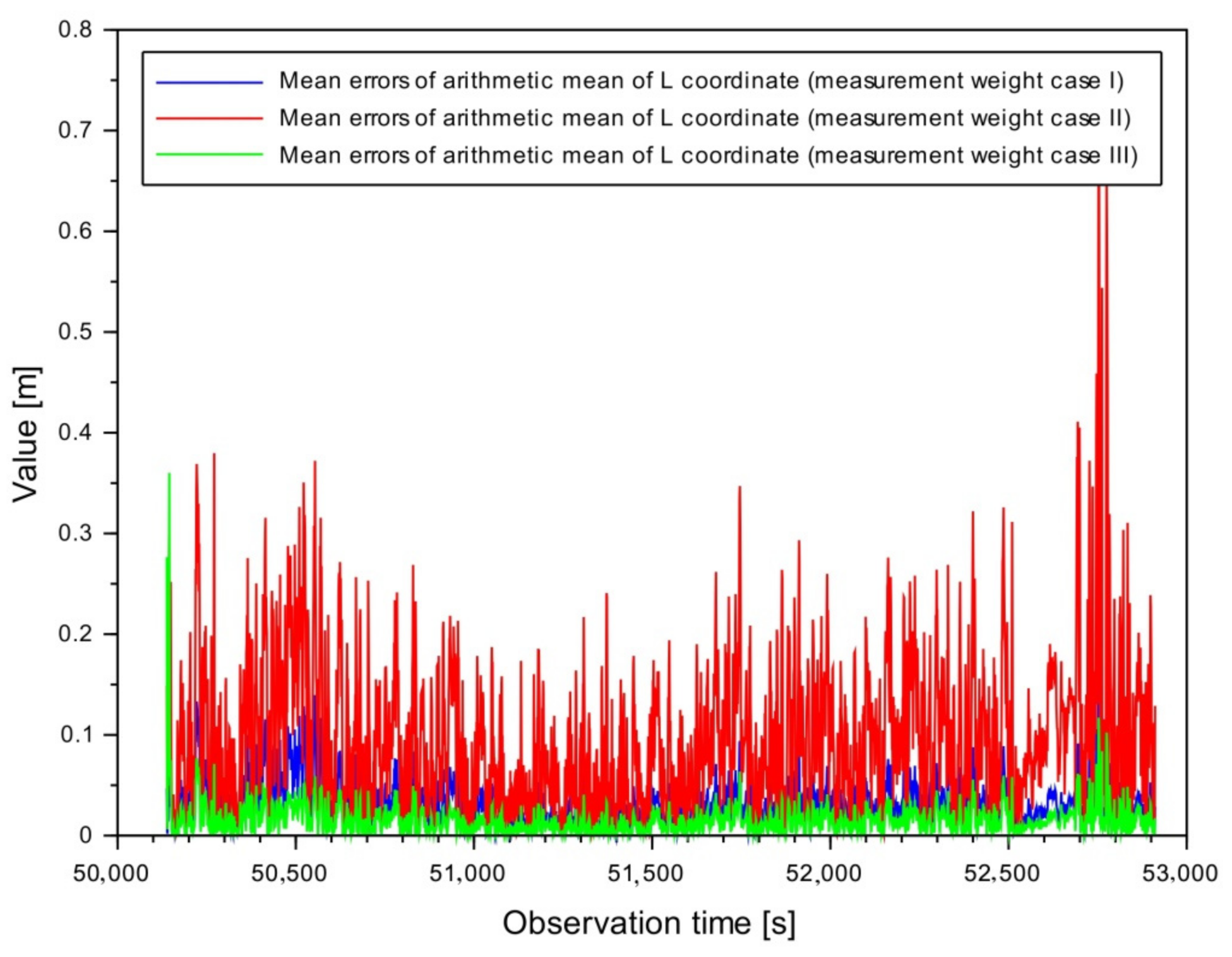
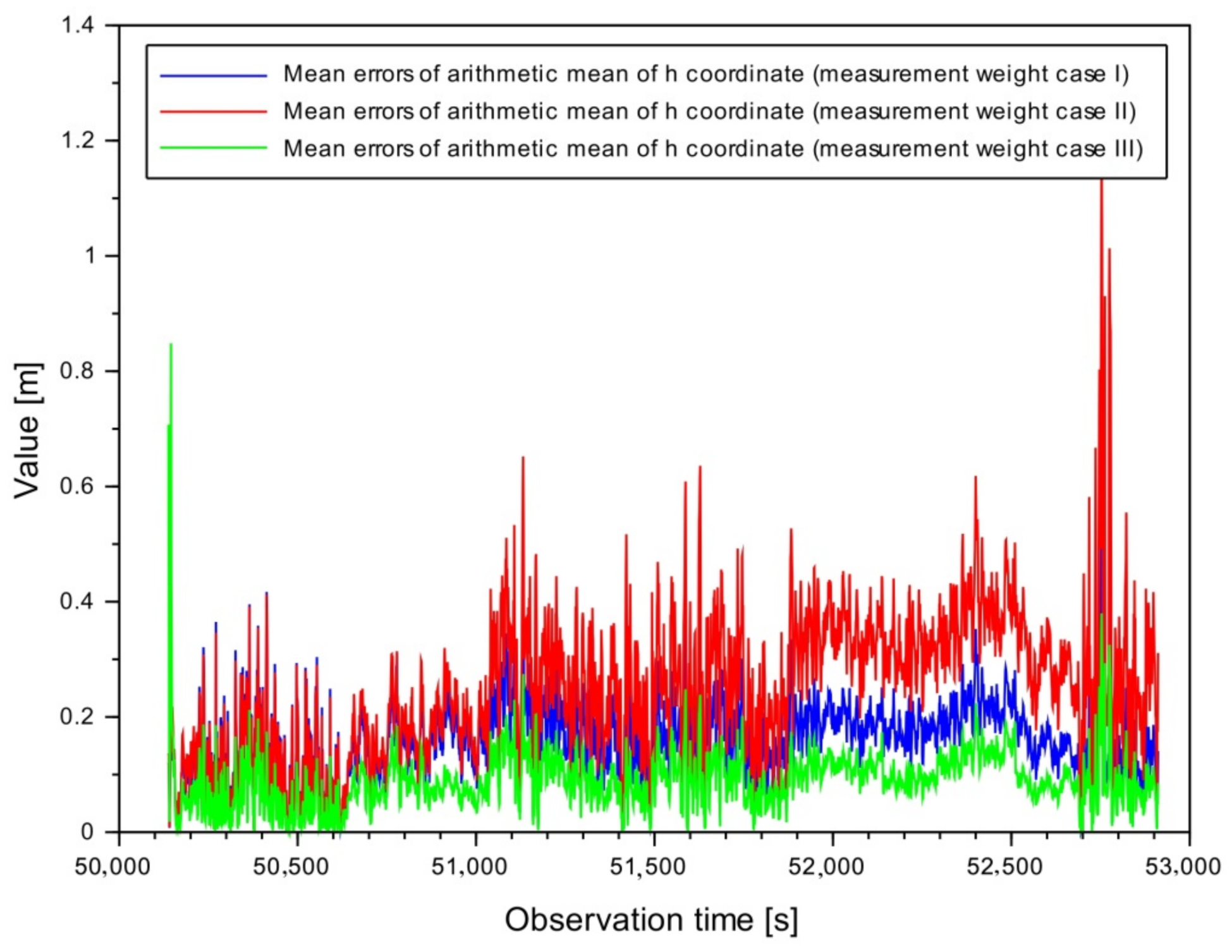
- —mean error of the arithmetic mean for the resultant B component;
- —mean error of the arithmetic mean for the resultant L component;
- —mean error of the arithmetic mean for the resultant h component.
4. Research Test
5. Results
6. Discussion
- -
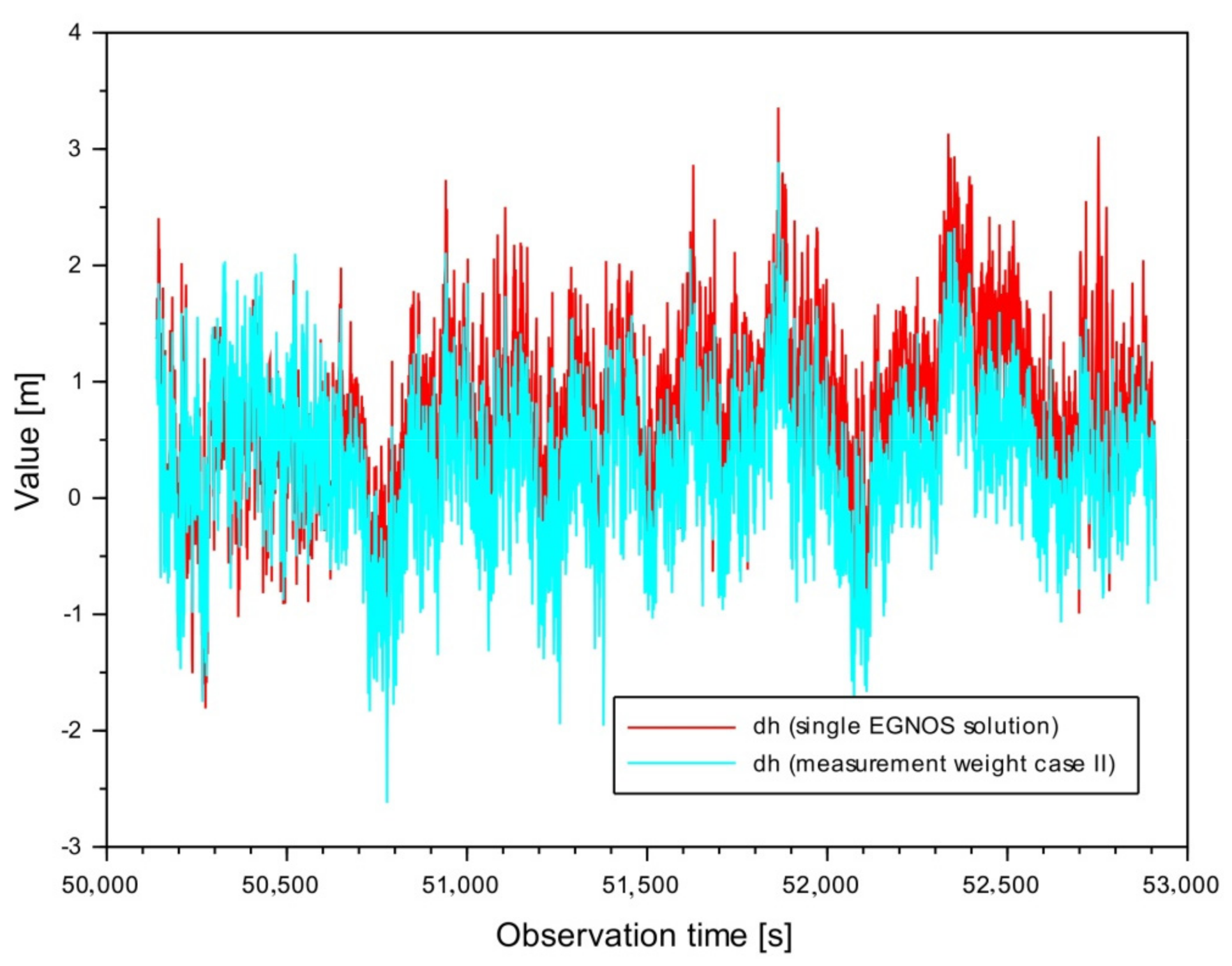
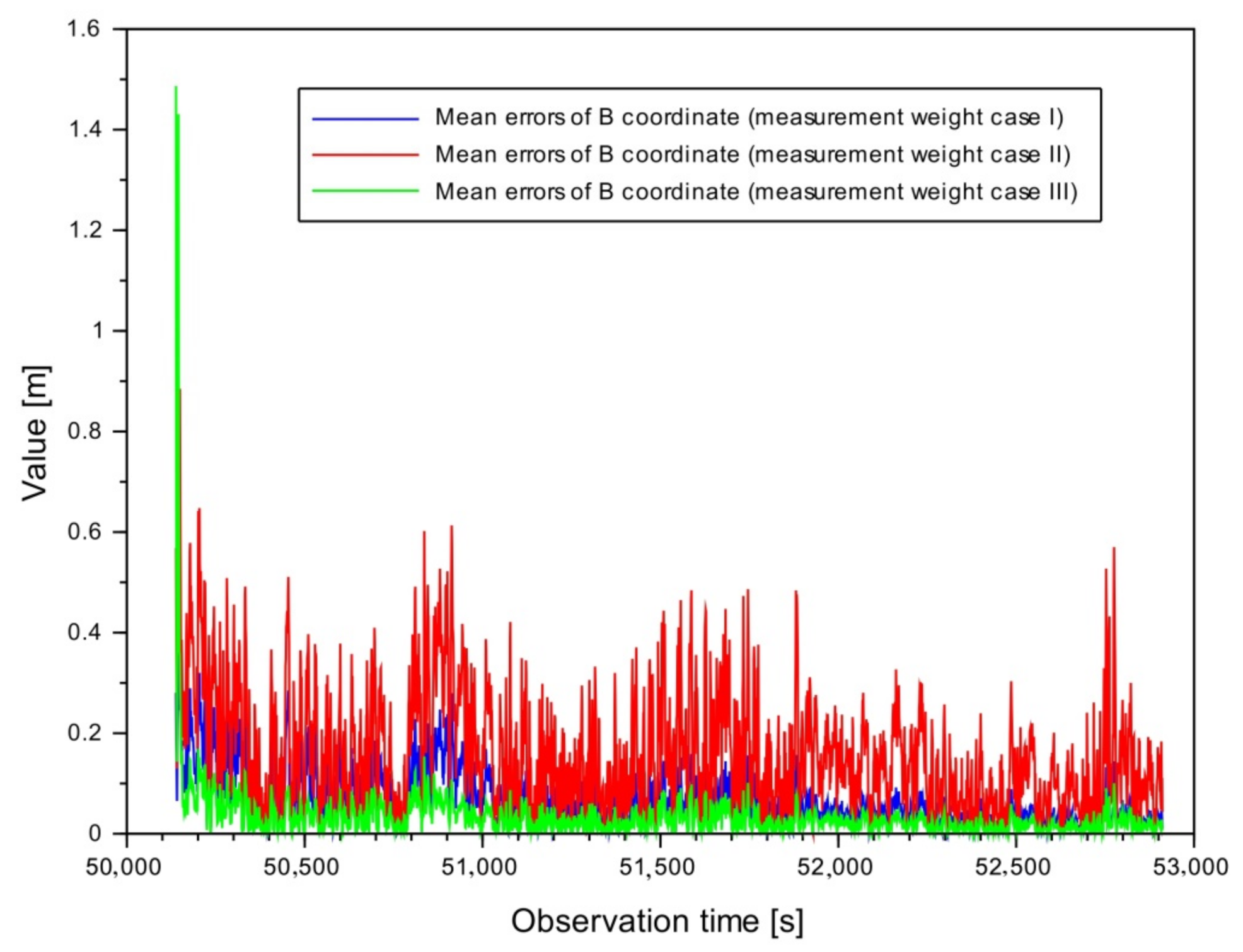
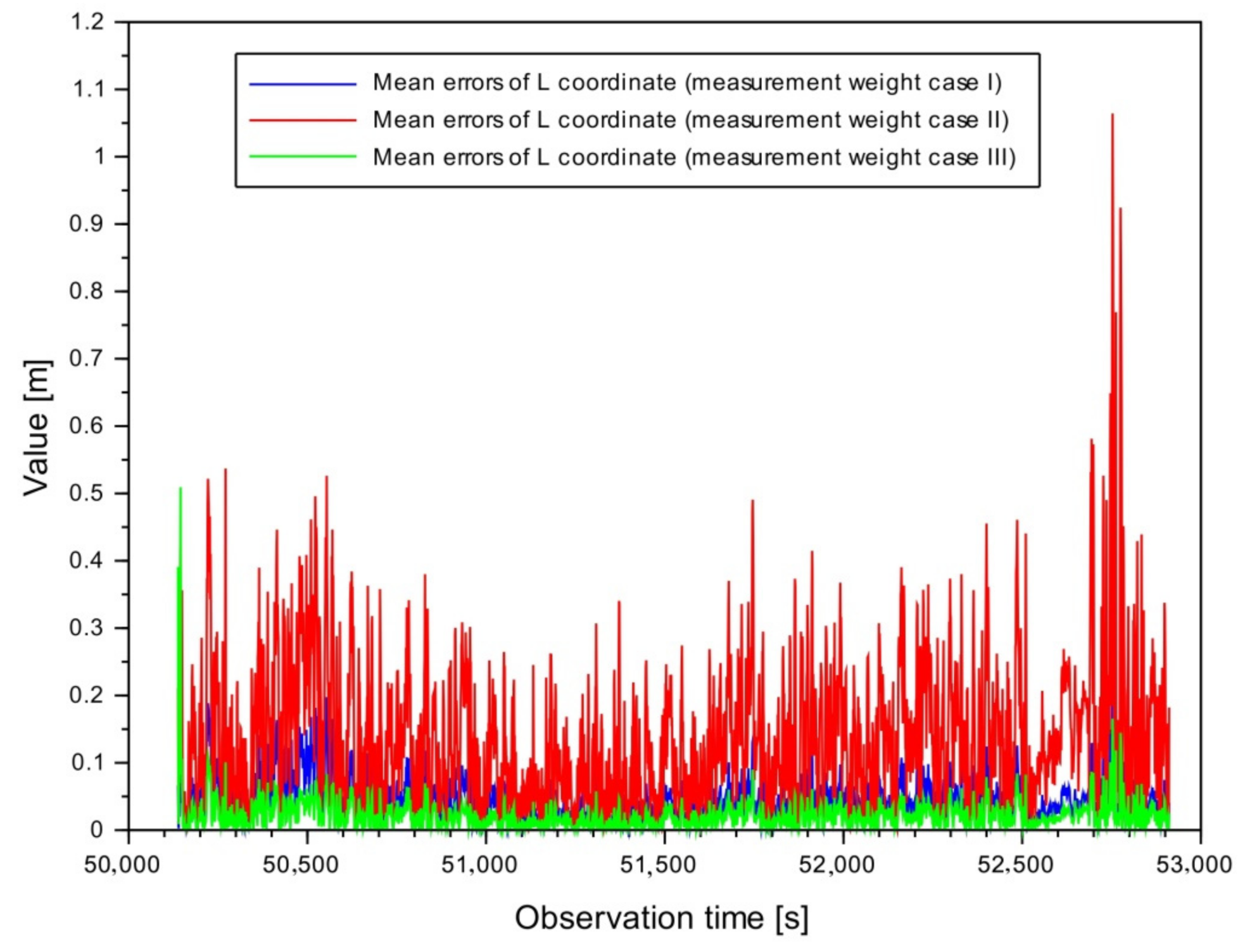
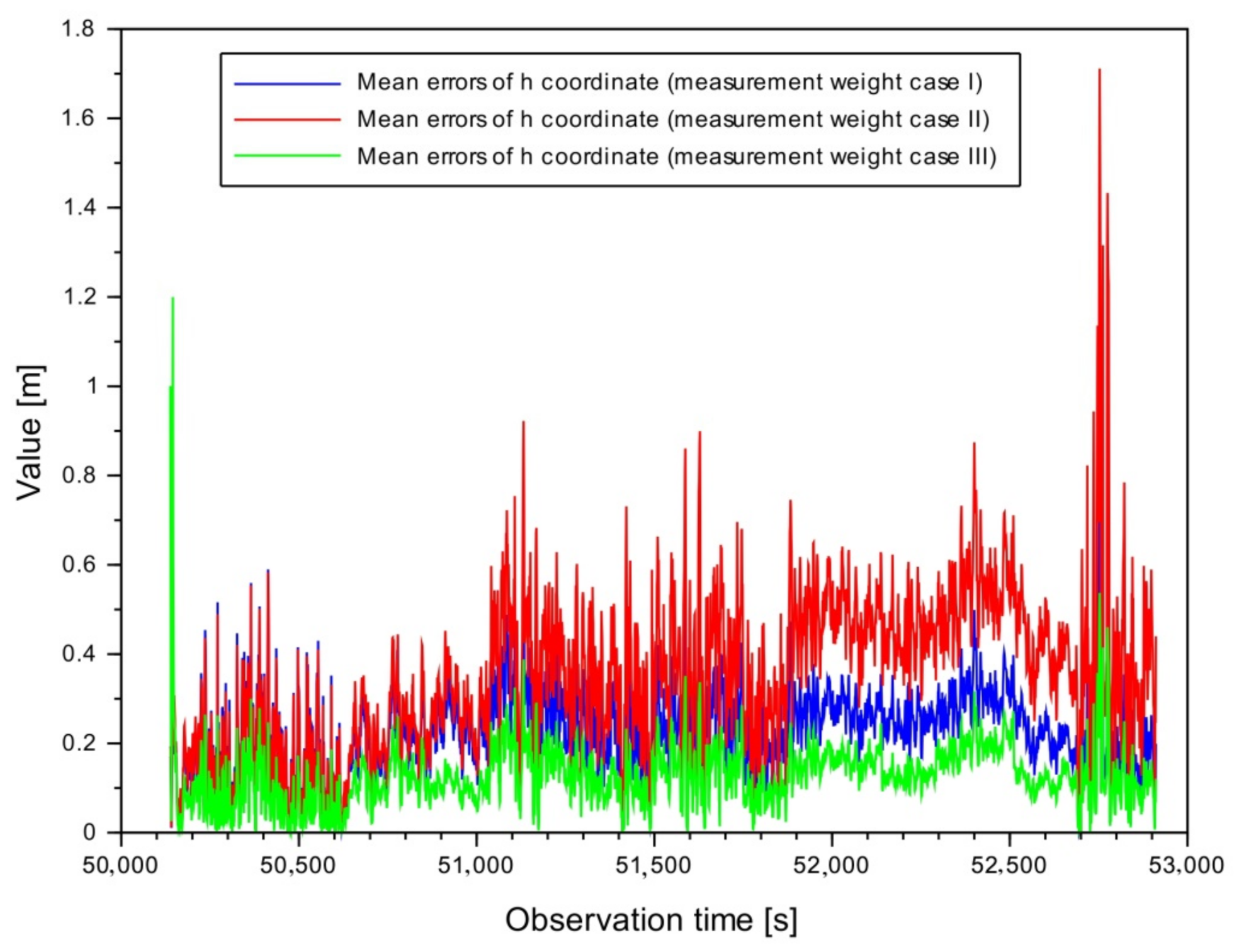
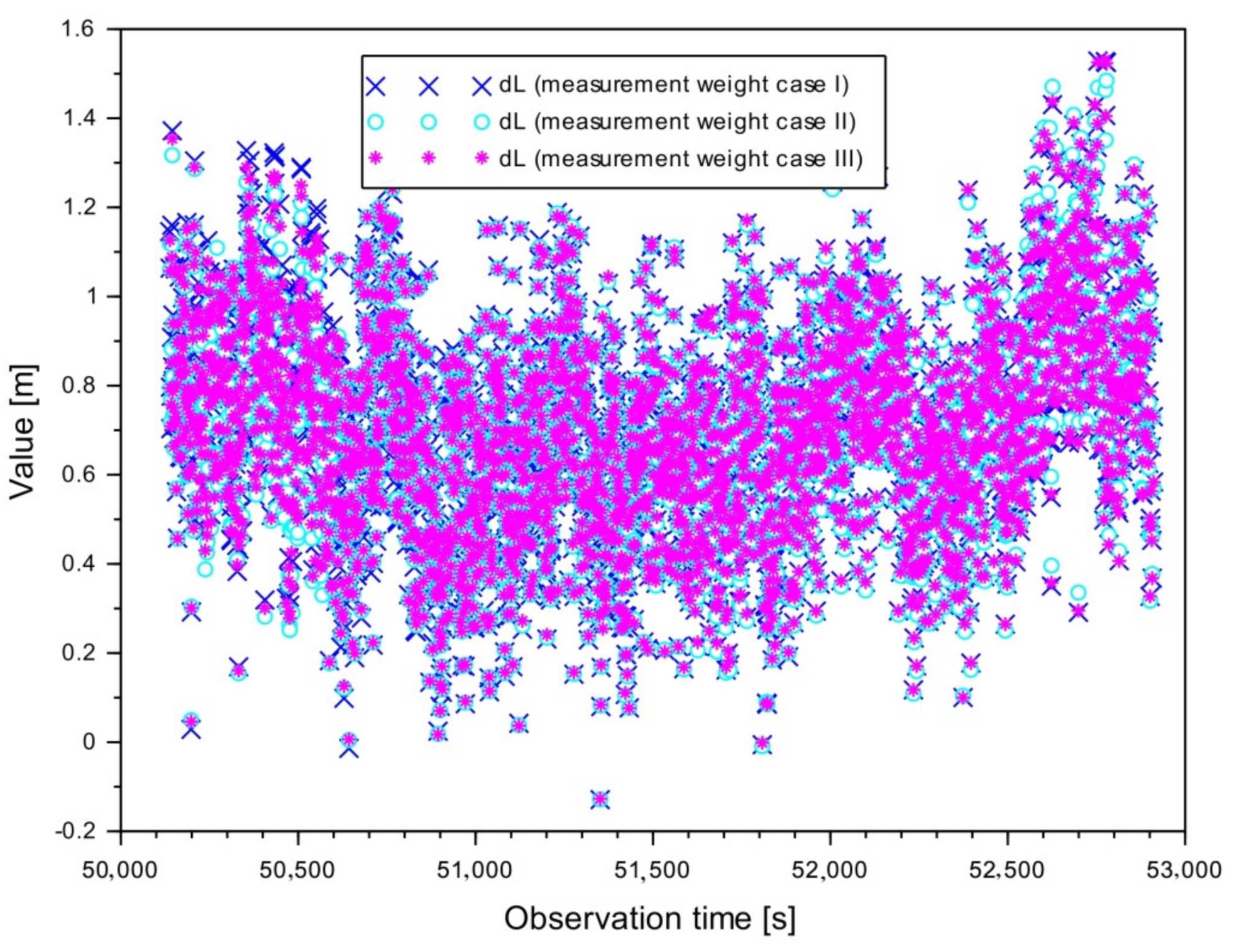
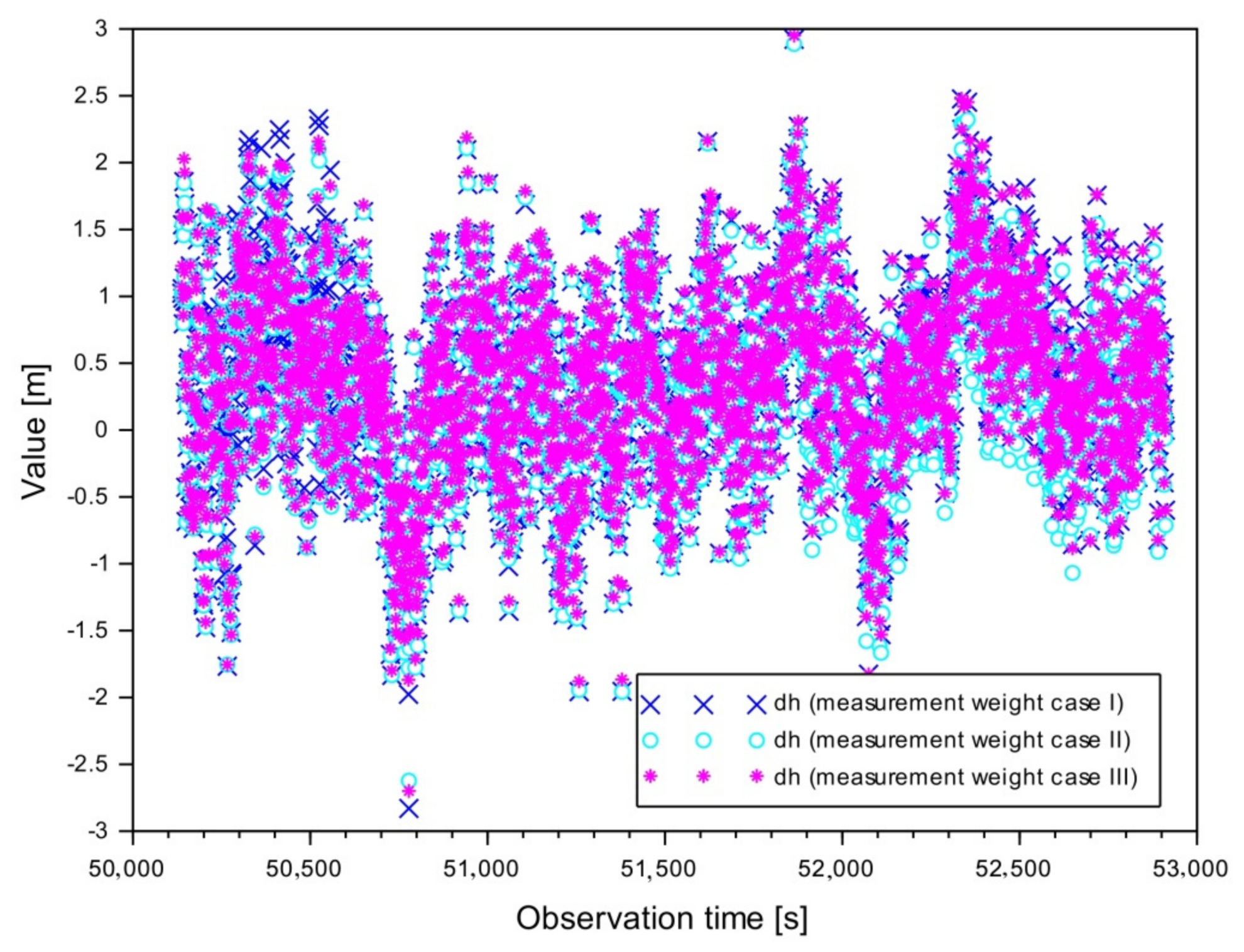
- the improvement of the accuracy of Solution II in relation to the results from Variant I is, respectively, 2% for the B component, 1% for the L component, and 19% for the h component;
- -
- the improvement of the accuracy of Solution II in relation to Variant III results is 1% for the B component, 1% for the L component, and 22% for the h component.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- EASA. Concept of Operations for Drones. 2015, p. 12. Available online: https://www.easa.europa.eu/sites/default/files/dfu/204696_EASA_concept_drone_brochure_web.pdf (accessed on 10 March 2021).
- Wierzbicki, D.; Krasuski, K. Determination the coordinates of the projection center in the digital aerial triangulation using data from Unmanned Aerial Vehicle. Aparatura Badawcza i Dydaktyczna 2016, 3, 127–134. (In Polish) [Google Scholar]
- Wierzbicki, D.; Krasuski, K. Determining the Elements of Exterior Orientation in Aerial Triangulation Processing Using UAV Technology. Commun. Sci. Lett. Univ. Zilina 2020, 22, 15–24. [Google Scholar] [CrossRef]
- Lalak, M.; Wierzbicki, D.; Kędzierski, M. Methodology of Processing Single-Strip Blocks of Imagery with Reduction and Optimization Number of Ground Control Points in UAV Photogrammetry. Remote Sens. 2020, 12, 3336. [Google Scholar] [CrossRef]
- Jimenez-Baňos, D.; Powe, M.; Raj Matur, A.; Toran, F.; Flament, D.; Chatre, E. EGNOS Open Service guidelines for receiver manufacturers. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 2505–2512. [Google Scholar]
- Krasuski, K.; Wierzbicki, D. Monitoring Aircraft Position Using EGNOS Data for the SBAS APV Approach to the Landing Procedure. Sensors 2020, 20, 1945. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krasuski, K.; Wierzbicki, D. Application the SBAS/EGNOS Corrections in UAV Positioning. Energies 2021, 14, 739. [Google Scholar] [CrossRef]
- Ciećko, A.; Grunwald, G. Klobuchar, NeQuick G, and EGNOS Ionospheric Models for GPS/EGNOS Single-Frequency Positioning under 6–12 September 2017 Space Weather Events. Appl. Sci. 2020, 10, 1553. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Wang, J.; Li, H.; Balz, T. Global Assessment of the GNSS Single Point Positioning Biases Produced by the Residual Tropospheric Delay. Remote Sens. 2021, 13, 1202. [Google Scholar] [CrossRef]
- Sanz Subirana, J.; Juan Zornoza, J.M.; Hernandez-Pajares, M. Fundamentals and algorithms. In GNSS Data Processing; ESA Communications ESTEC: Noordwijk, The Netherlands, 2013; Volume 1, ISBN 978-92-9221-886-7. [Google Scholar]
- Grzegorzewski, M.; Ciecko, A.; Oszczak, S.; Popielarczyk, D. Autonomous and EGNOS Positioning Accuracy Determination of Cessna Aircraft on the Edge of EGNOS Coverage. In Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 407–410. [Google Scholar]
- Balsi, M.; Prem, S.; Williame, K.; Teboul, D.; Délétraz, L.; Hebrard Capdeville, P.I. Establishing new foundations for the use of remotely-piloted aircraft systems for civilian applications. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, 2, 197–201. [Google Scholar] [CrossRef] [Green Version]
- Yoon, H.; Seok, H.; Lim, C.; Park, B. An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors 2020, 20, 3047. [Google Scholar] [CrossRef]
- Sheridan, I. Drones and global navigation satellite systems: Current evidence from polar scientists. R. Soc. Open Sci. 2020, 7, 191494. [Google Scholar] [CrossRef] [Green Version]
- Alarcón, F.; Viguria, A.; Vilardaga, S.; Montolio, J.; Soley, S. EGNOS-based Navigation and Surveillance System to Support the Approval of RPAS Operations. In Proceedings of the 9th SESAR Innovation Days, Athens, Greece, 2–6 December 2019. [Google Scholar]
- Tamouridou, A.A.; Alexandridis, T.; Pantazi, X.; Lagopodi, A.L.; Kashefi, J.; Kasampalis, D.A.; Kontouris, G.; Moshou, D. Application of Multilayer Perceptron with Automatic Relevance Determination on Weed Mapping Using UAV Multispectral Imagery. Sensors 2017, 17, 2307. [Google Scholar] [CrossRef]
- Molina, P.; Colomina, I.; Vitoria, T.; Silva, P.F.; Stebler, Y.; Skaloud, J.; Kornus, W.; Prades, R. EGNOS-based multi-sensor accurate and reliable navigation. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2012, 1, 87–93. [Google Scholar] [CrossRef] [Green Version]
- Molina, P.; Colomina, I.; Vitoria, T.; Freire, P.; Skaloud, J.; Kornus, W.; Mata, R.; Aguilera, C. The CLOSE-SEARCH project UAV-based search operations using thermal imaging and EGNOS-SoL navigation. In Proceedings of the GeoInformation for Disaster Management Conference (Gi4DM 2011), Antalya, Turkey, 3–7 May 2011. [Google Scholar]
- Molina, P.; Colomina, I.; Victoria, T.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Searching lost people with UAVS: The system and results of the CLOSE-SEARCH project. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Molina, P.; Colomina, I.; Vitoria, T.; Silva, P.F.; Bandeiras, J.; Stebler, Y.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Integrity Aspects of Hybrid EGNOS-based Navigation on Support of Search-And-Rescue Missions with UAVs. In Proceedings of the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 3773–3781. [Google Scholar]
- Fellner, A.; Sulkowski, J.; Trominski, P.; Zadrag, P. The use of reference systems for UAV flight routing. In Proceedings of the EGU General Assembly, Vienna, Austria, 22–27 April 2012; p. 6434. [Google Scholar]
- Pullen, S.; Enge, P.; Lee, J. Local-Area Differential GNSS Architectures Optimized to Support Unmanned Aerial Vehicles (UAVs). In Proceedings of the International Technical Meeting of the Institute of Navigation (ION ITM 2013), San Diego, CA, USA, 28–30 January 2013; pp. 559–571. [Google Scholar]
- Watanabe, Y.; Manecy, A.; Hiba, A.; Nagai, S.; Shin, A. Vision-integrated navigation system for aircraft final approach in case of GNSS/SBAS or ILS failures. In Proceedings of the AIAA Scitech 2019, San Diego, CA, USA, 7–11 January 2009; p. 113. [Google Scholar]
- Geister, R.; Limmer, L.; Rippl, M.; Dautermann, T. Total system error performance of drones for an unmanned PBN concept. In Proceedings of the IEEE Integrated Communications, Navigation, Surveillance Conference (ICNS 2018), Herndon, VA, USA, 10–12 April 2018; pp. 2D4-1–2D4-9. [Google Scholar]
- Simon, J.; Ostolaza, J.; Moran, J.; Fernandez, M.; Caro, J.; Madrazo, A. On the Performance of Dual-frequency Multi-constellation SBAS: Real Data Results with Operational State-of-the-art SBAS Prototype. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 1298–1309. [Google Scholar]
- Sakai, T. The Status of Dual-Frequency Multi-Constellation SBAS Trial by Japan. In Proceedings of the IS-GNSS 2017, Hong Kong, China, 10–13 December 2017; pp. 1–15. [Google Scholar]
- Tsai, Y.; Low, K. Performance assessment on expanding SBAS service areas of GAGAN and MSAS to Singapore region. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 686–691. [Google Scholar]
- Azoulai, L.; Virag, S.; Leinekugel-Le-Cocq, R.; Germa, C.; Charlot, B. Multi SBAS Interoperability Flight Trials with A380. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1449–1464. [Google Scholar]
- INTERNATIONAL CIVIL AVIATION ORGANIZATION ASIA AND PACIFIC OFFICE. SBAS Safety Assessment Guidance Related to Anomalous Ionospheric Conditions; Edition 1.0—July 2016 Adopted by APANPIRG/27; ICAO: Montreal, QC, Canada, 2016; pp. 1–26. [Google Scholar]
- Sahmoudi, M.; Issler, J.-L.; Perozans, F.; Tawk, Y.; Jovanovic, A.; Botteron, C.; Farine, P.A.; Rene, L.; Dehant, V.; Caporali, A.; et al. U-SBAS: A universal multi-SBAS standard to ensure compatibility, interoperability and interchangeability. In Proceedings of the 2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–18. [Google Scholar]
- Park, K.W.; Park, J.I.; Park, C. Efficient Methods of Utilizing Multi-SBAS Corrections in Multi-GNSS Positioning. Sensors 2020, 20, 256. [Google Scholar] [CrossRef] [Green Version]
- Walter, T.; Blanch, J.; Kropp, V. Satellite Selection for Aviation Users of Multi-Constellation SBAS; InsideGNSS: Red Bank, NJ, USA, 2016; pp. 50–58. [Google Scholar]
- Heßelbarth, A.; Wanninger, L. SBAS orbit and satellite clock corrections for precise point positioning. GPS Solut. 2013, 17, 465–473. [Google Scholar] [CrossRef]
- Nie, Z.; Zhou, P.; Liu, F.; Wang, Z.; Gao, Y. Evaluation of Orbit, Clock and Ionospheric Corrections from Five Currently Available SBAS L1 Services: Methodology and Analysis. Remote Sens. 2019, 11, 411. [Google Scholar] [CrossRef] [Green Version]
- Krasuski, K.; Wierzbicki, D. New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems. Energies 2021, 14, 2525. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Grunwald, G.; Wierzbicki, D. Assessment of velocity accuracy of aircraft in the dynamic tests using GNSS sensors. Facta Univ. Ser. Mech. Eng. 2020, 18, 18–301. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Bakuła, M.; Wierzbicki, D. New Strategy for Improving the Accuracy of Aircraft Positioning Based on GPS SPP Solution. Sensors 2020, 20, 4921. [Google Scholar] [CrossRef]
- Kozuba, J.; Krasuski, K.; Ćwiklak, J.; Jafernik, H. Aircraft position determination in SBAS system in air transport. In Proceedings of the 17th International Conference Engineering for rural development, Jelgava, Latvia, 23–25 May 2018; pp. 788–794. [Google Scholar]
- Lim, C.-S.; Seok, H.-J.; Hwang, H.-Y.; Park, B. Prediction on the Effect of Multi-Constellation SBAS by the Application of SDCM in Korea and Its Performance Evaluation. J. Adv. Navig. Technol. 2016, 20, 417–424. [Google Scholar] [CrossRef] [Green Version]
- Krasuski, K. The Research of Accuracy of Aircraft Position Using SPP Code Method. Ph.D. Thesis, Warsaw University of Technology, Warsaw, Poland, September 2019; pp. 1–106. (In Polish). [Google Scholar]
- Specht, M. Statistical Distribution Analysis of Navigation Positioning System Errors—Issue of the Empirical Sample Size. Sensors 2020, 20, 7144. [Google Scholar] [CrossRef] [PubMed]
- Osada, E. Geodesy; Oficyna Wydawnicza Politechniki Wroclawskiej: Wroclaw, Poland, 2001; Volume 92, pp. 236–241. ISBN 83-7085-663-2. (In Polish) [Google Scholar]
- Wingtra Service. Available online: www.wingtra.com (accessed on 10 March 2021).
- CNES Service. Available online: Ftp://serenad-public.cnes.fr/SERENAD0 (accessed on 10 March 2021).
- Takasu, T. RTKLIB ver. 2.4.2 Manual, RTKLIB: An Open Source Program. Package for GNSS Positioning. 2013. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 30 March 2021).
- Krasuski, K. Application of the GPS/EGNOS solution for the precise positioning of an aircraft vehicle. Sci. J. Sil. Univ. Technol. Ser. Transport. 2017, 96, 81–93. [Google Scholar] [CrossRef]
- Jafernik, H.; Krasuski, K.; Ćwiklak, J. Tests of the EGNOS System for Recovery of Aircraft Position in Civil Aircraft Transport. Rev. Eur. Derecho Naveg. Marítima Aeronáutica 2019, 36, 17–38. [Google Scholar]
- Scilab Website. Available online: https://www.scilab.org/ (accessed on 30 March 2021).
- Burdziakowski, P.; Specht, C.; Dabrowski, P.S.; Specht, M.; Lewicka, O.; Makar, A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors 2020, 20, 4000. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | Navigational Parameter | Mean Weighted Model | Assessment |
|---|---|---|---|
| UAV [7] | Resultant coordinates BLh of UAV [7] | Measurement weights were defined as the inverse of the squared mean error values of the determined coordinates [7] | Standard deviation of the UAV position calculated from the weighted mean model improved by about 21 ÷ 50% compared to the arithmetic mean model’s solution [7] |
| Aircraft [35] | Resultant coordinates XYZ of aircraft vehicle [35] | The measurement weights are a function of the number of GPS and GLONASS satellites and the inverse of the mean error square [35] | The obtained accuracy is better by 11–87% for the model with a weighting scheme as a function of the inverse of the mean error square [35] |
| Aircraft [36] | Resultant velocity of aircraft vehicle [36] | Measurement weights were defined as the inverse number of GNSS satellites [36] | The RMS error of resultant velocity is less than 0.05 m/s [36] |
| Aircraft [37] | Resultant coordinates XYZ of aircraft vehicle [37] | Measurement weights were used as a function of the number of GPS satellites being tracked, and geometric PDOP (position dilution of precision) coefficient [37] | The RMS (root mean square) accuracy of positioning for XYZ geocentric coordinates was better than 1.2% to 33.7% for the weighted average method compared to a single GPS SPP solution [37] |
| Accuracy Parameter | Measurement Weight | Value (m) |
|---|---|---|
| Between −0.757 to 0.316 | ||
| Between −0.632 to 0.308 | ||
| Between −0.707 to 0.296 | ||
| Between −0.276 to 0.541 | ||
| Between −0.291 to 0.726 | ||
| Between −0.296 to 0.702 |
| Accuracy Parameter | Measurement Weight | Value (m) |
|---|---|---|
| Between −0.417 to 0.514 | ||
| Between −0.328 to 0.559 | ||
| Between −0.326 to 0.509 | ||
| Between −0.514 to 0.275 | ||
| Between −0.469 to 0.408 | ||
| Between −0.519 to 0.323 |
| Accuracy Parameter | Measurement Weight | Value (m) |
|---|---|---|
| Between −1.244 to 1.668 | ||
| Between −0.902 to 2.030 | ||
| Between −0.975 to 1.652 | ||
| Between −1.668 to 0.711 | ||
| Between −1.305 to 1.054 | ||
| Between −1.683 to 0.980 |
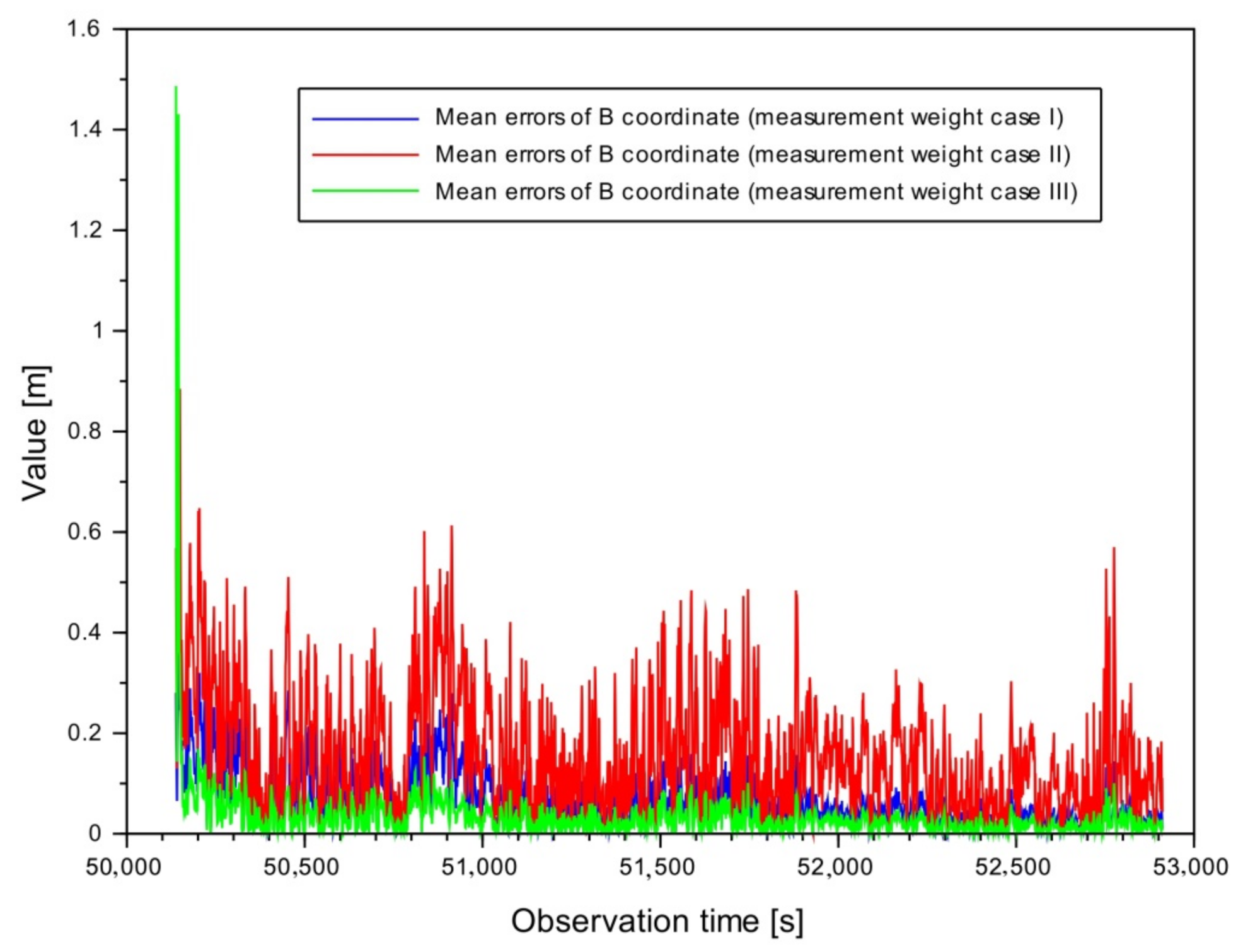
| Coordinate | Measurement Weight | Maximum Values of | Statistical Value of |
|---|---|---|---|
| B | 0.416 | 3.841 | |
| B | 0.885 | 3.841 | |
| B | 1.487 | 3.841 | |
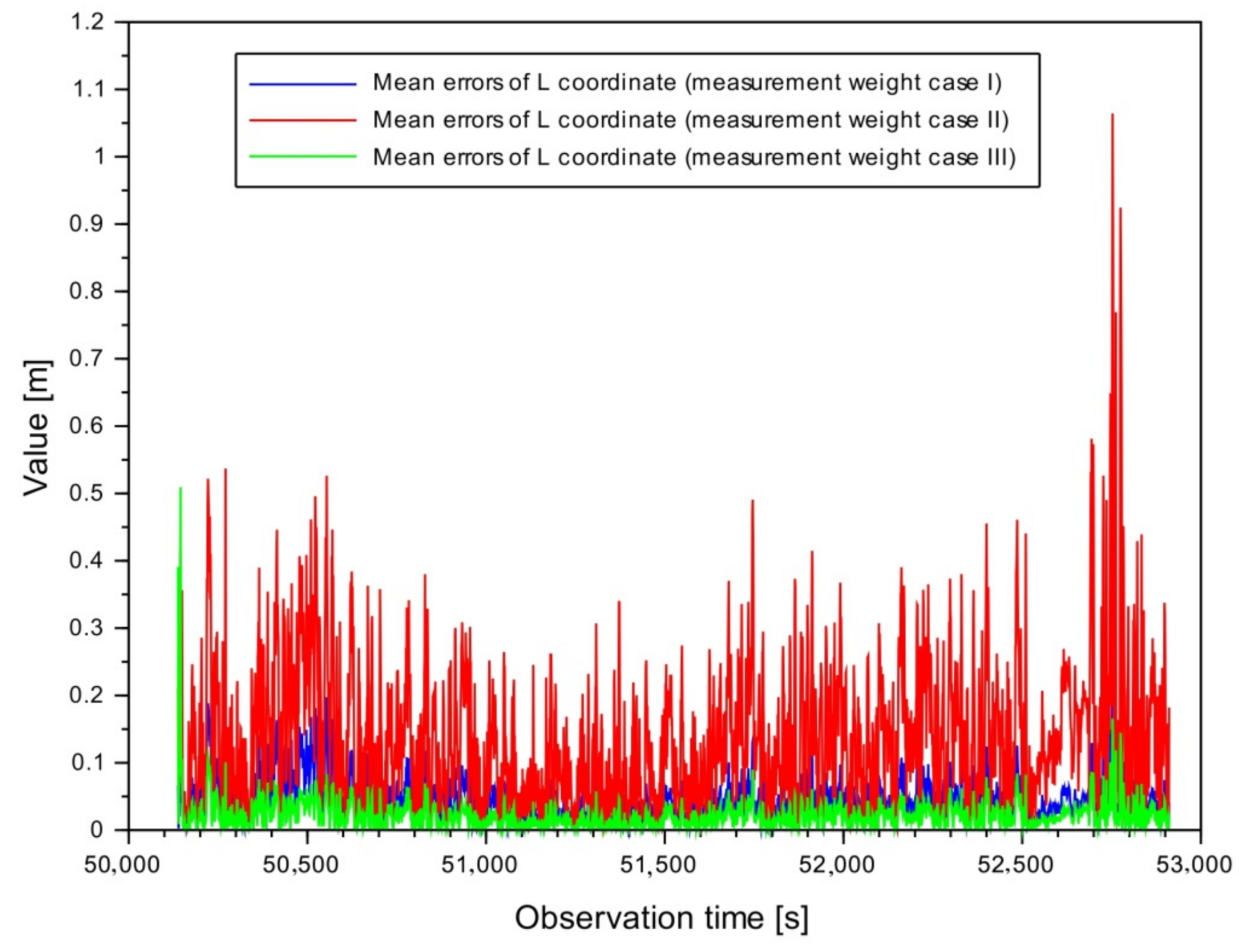
| Coordinate | Measurement weight | Maximum values of | Statistical value of |
| L | 0.242 | 3.841 | |
| L | 1.064 | 3.841 | |
| L | 0.509 | 3.841 | |
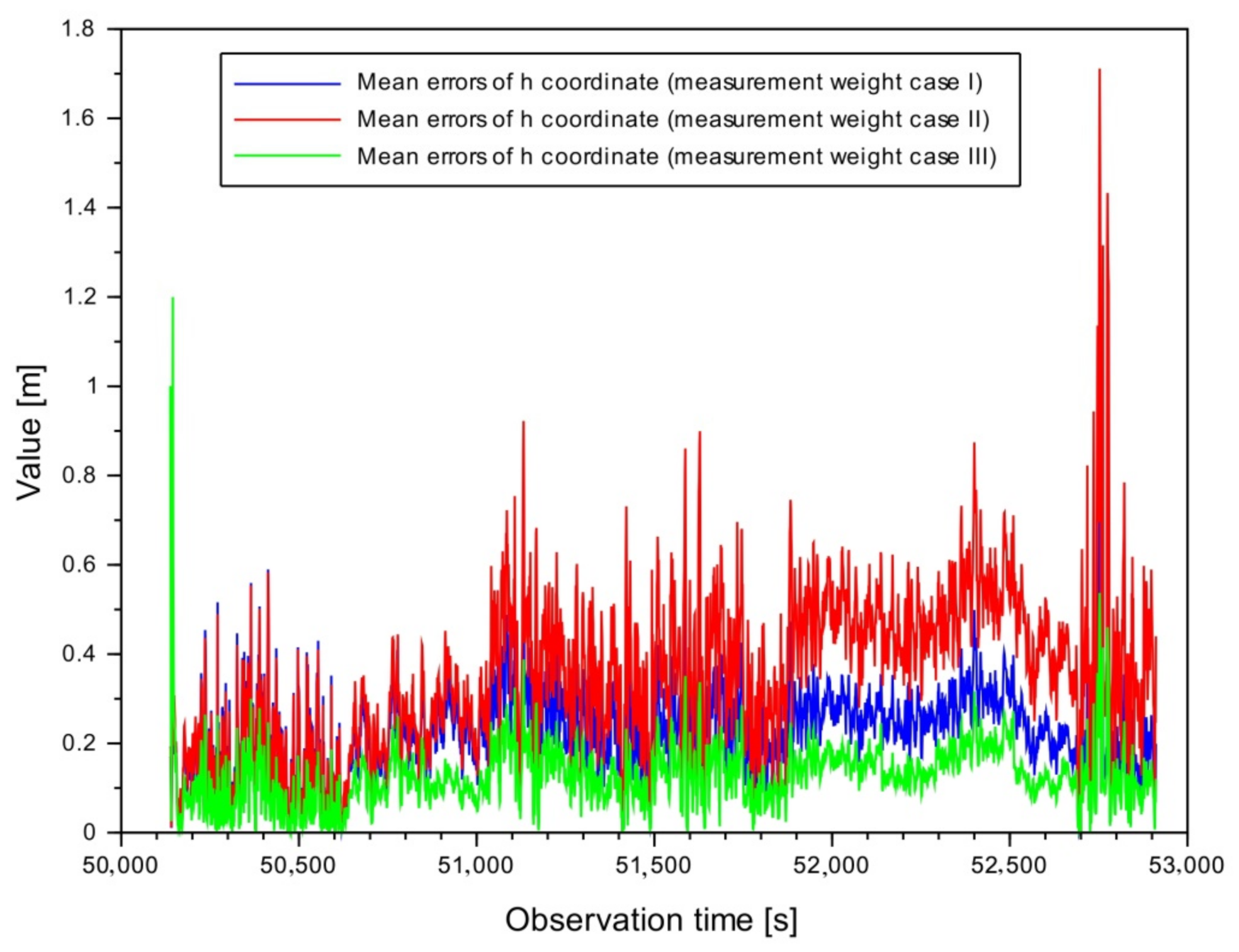
| Coordinate | Measurement weight | Maximum values of | Statistical value of |
| h | 0.787 | 3.841 | |
| h | 1.711 | 3.841 | |
| h | 1.199 | 3.841 |
| Accuracy Parameter | Measurement Weight | Value (m) | Comment |
|---|---|---|---|
| 0.934 | The highest accuracy is visible for the weighing Variant II | ||
| 0.919 | |||
| 0.924 | |||
| 0.712 | The highest accuracy is visible for the weighing Variant II | ||
| 0.706 | |||
| 0.710 | |||
| 0.366 | The highest accuracy is visible for the weighing Variant II | ||
| 0.295 | |||
| 0.381 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krasuski, K.; Wierzbicki, D.; Bakuła, M. Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sens. 2021, 13, 2597. https://doi.org/10.3390/rs13132597
Krasuski K, Wierzbicki D, Bakuła M. Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sensing. 2021; 13(13):2597. https://doi.org/10.3390/rs13132597
Chicago/Turabian StyleKrasuski, Kamil, Damian Wierzbicki, and Mieczysław Bakuła. 2021. "Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution" Remote Sensing 13, no. 13: 2597. https://doi.org/10.3390/rs13132597
APA StyleKrasuski, K., Wierzbicki, D., & Bakuła, M. (2021). Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sensing, 13(13), 2597. https://doi.org/10.3390/rs13132597