
Retrieving Three-Dimensional Large Surface Displacements in Coal Mining Areas by Combining SAR Pixel Offset Measurements with an Improved Mining Subsidence Model



Abstract
:1. Introduction
2. Principle of Mining Subsidence
2.1. Mining Subsidence in the Original Mining Subsidence Model
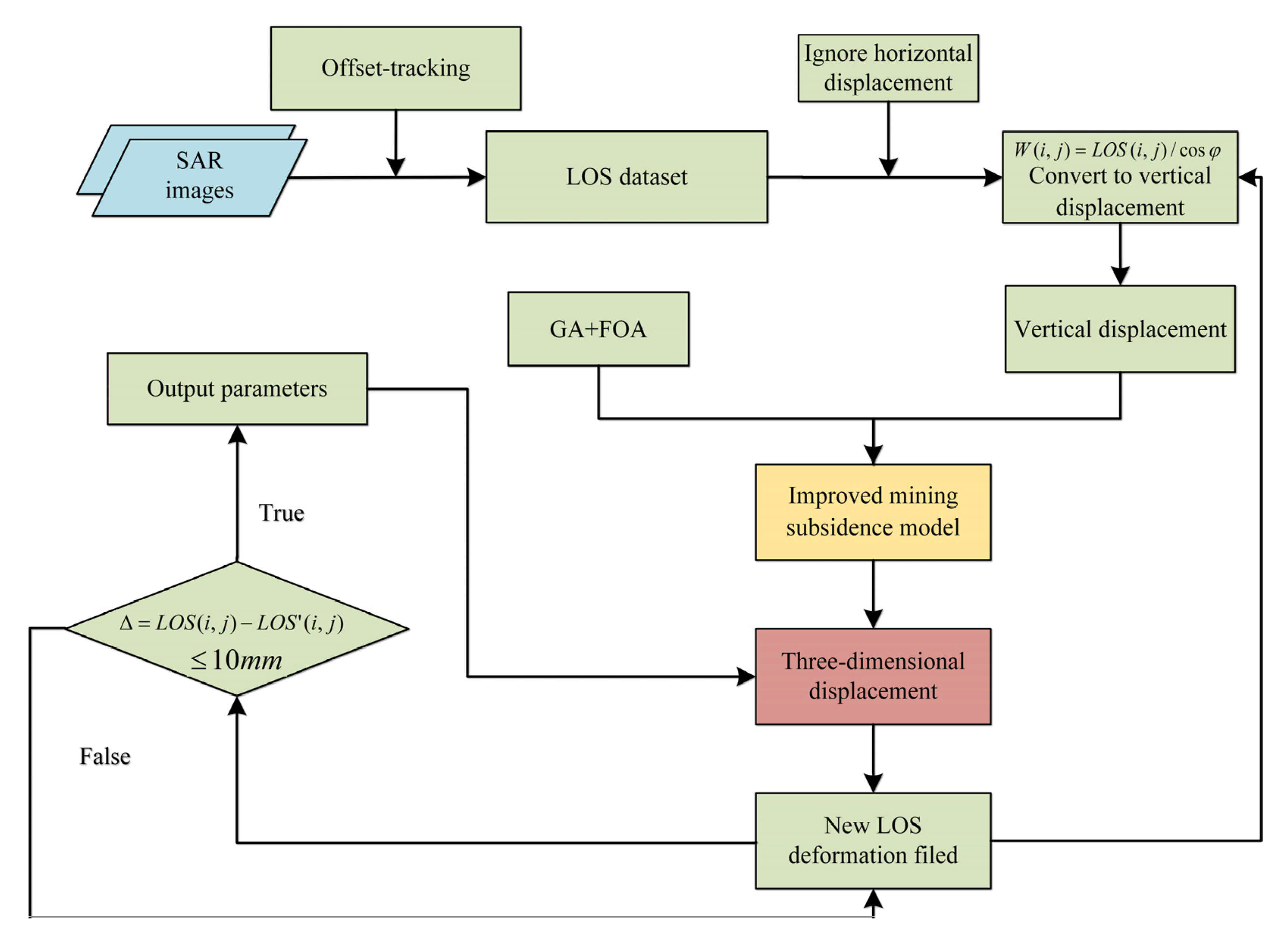
2.2. Modeling 3D Surface Displacements in Coal Mining Areas with Improved Mining Subsidence Model
2.3. Estimation of Model Parameters using OT Results
3. Case Study
3.1. Study Area and Data Used in this Study
3.2. 3D Surface Displacement Model in the Study Area
3.3. Performance Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, F.; Gu, H.; Jie, G.; Rong, L. Analysis of ground deformation based on GPS in Sanshandao gold mine, China. J. Nepal Geol. Soc. 2018, 55, 7–14. [Google Scholar] [CrossRef]
- Dinescu, S.A. Using GIS/GPS for monitoring the closed mine areas. In Proceedings of the 17th International Multidisciplinary Scientific GeoConference SGEM2017, Albena, Bulgaria, 29 June–5 July 2017. [Google Scholar]
- Amelung, F.; Galloway, D.L.; Bell, J.W.; Zebker, H.A.; Laczniak, R.J. Sensing the ups and downs of Las Vegas: InSAR reveals structural control of land subsidence and aquifer-system deformation. Geology 1999, 27, 483–486. [Google Scholar] [CrossRef]
- Hooper, A. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, 10029–10034. [Google Scholar] [CrossRef]
- Qing, Y.; Zhanqiang, C.; Yanqiao, W.; Yanxin, Z.; Songbo, H. Ground deformation of Dongsheng mining area revealed by multi-temporal InSAR. IOP Conf. Ser. Earth Environ. Sci. 2021, 675, 012029. [Google Scholar]
- Ishwar, S.G.; Kumar, D. Application of DInSAR in Mine Surface Subsidence Monitoring and Prediction. Curr. Sci. 2017, 112, 46. [Google Scholar] [CrossRef]
- Wempen, J.M.; Mccarter, M.K. Comparison of L-band and X-band differential interferometric synthetic aperture radar for mine subsidence monitoring in central Utah. Int. J. Min. Sci. Technol. 2017, 27, 159–163. [Google Scholar] [CrossRef]
- Fan, H.; Xu, Q.; Hu, Z.; Du, S. Using temporarily coherent point interferometric synthetic aperture radar for land subsidence monitoring in a mining region of western China. J. Appl. Remote Sens. 2017, 11, 26003. [Google Scholar] [CrossRef]
- Pawluszek-Filipiak, K.; Borkowski, A. Integration of DInSAR and SBAS Techniques to Determine Mining-Related Deformations Using Sentinel-1 Data: The Case Study of Rydułtowy Mine in Poland. Remote Sens. 2020, 12, 242. [Google Scholar] [CrossRef] [Green Version]
- Zebker, H.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Zhang, Q.; Zhao, C.; Ji, L.; Zhu, W. Monitoring mine collapse by D-InSAR. Min. Sci. Technol. 2010, 20, 441–500. [Google Scholar] [CrossRef]
- Zhao, C.; Lu, Z.; Zhang, Q.; Yang, C.; Zhu, W. Mining collapse monitoring with SAR imagery data: A case study of Datong mine, China. J. Appl. Remote Sens. 2014, 8, 83574. [Google Scholar] [CrossRef]
- Zhao, C.; Zhong, L.U.; Zhang, Q. Time-series deformation monitoring over mining regions with SAR intensity-based offset measurements. Remote Sens. Lett. 2013, 4, 436–445. [Google Scholar] [CrossRef]
- Huang, J.; Deng, K.; Fan, H.; Yan, S. An improved pixel-tracking method for monitoring mining subsidence. Remote Sens. Lett. 2016, 7, 731–740. [Google Scholar] [CrossRef]
- Gudmundsson, S.; Sigmundsson, F.; Carstensen, J.M. Three-dimensional surface motion maps estimated from combined interferometric synthetic aperture radar and GPS data. J. Geophys. Res. Space Phys. 2002, 107, ETG 13. [Google Scholar] [CrossRef]
- Samsonov, S.; Tiampo, K. Analytical Optimization of a DInSAR and GPS Dataset for Derivation of Three-Dimensional Surface Motion. IEEE Geosci. Remote Sens. Lett. 2006, 3, 107–111. [Google Scholar] [CrossRef]
- Guglielmino, F.; Nunnari, G.; Puglisi, G.; Spata, A. Simultaneous and Integrated Strain Tensor Estimation From Geodetic and Satellite Deformation Measurements to Obtain Three-Dimensional Displacement Maps. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1815–1826. [Google Scholar] [CrossRef]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, 31. [Google Scholar] [CrossRef] [Green Version]
- HM, N.G.; Linlin, G.E.; Zhang, K.; Chang, H.C.; Xiaojing, L.; Rizos, C.; Omura, M. Deformation mapping in three dimensions for underground mining using InSAR—Southern highland coalfield in New South Wales, Australia. Int. J. Remote Sens. 2011, 32, 7227–7256. [Google Scholar]
- Gray, L. Using multiple RADARSAT InSAR pairs to estimate a full three-dimensional solution for glacial ice movement. Geophys. Res. Lett. 2011, 38, L05502. [Google Scholar]
- Samsonov, S.; Tiampo, K.; Rundle, J.; Li, Z. Application of DInSAR-GPS Optimization for Derivation of Fine-Scale Surface Motion Maps of Southern California. IEEE Trans. Geosci. Remote Sens. 2007, 45, 512–521. [Google Scholar] [CrossRef] [Green Version]
- Litwiniszyn, J. Stochastic Methods in Mechanics of Granular Bodies; Springer: Vienna, Austria, 1974. [Google Scholar]
- Fan, H.; Wen, B.; Liu, J.; Liu, J.; Yin, J. An improved method of three-dimensional displacement field generation in mining areas with a single InSAR pair. Eur. J. Remote Sens. 2019, 52, 493–503. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Li, Z.; Zhu, J.; Preusse, A.; Hu, J.; Feng, G.; Papst, M. Time-Series 3-D Mining-Induced Large Displacement Modeling and Robust Estimation from a Single-Geometry SAR Amplitude Data Set. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3600–36101. [Google Scholar] [CrossRef]
- Wu, K.; Ge, J. Some modifications of using probability method to predicate model. J. China Coal Soc. 1998, 23, 33–36. [Google Scholar]
- He, G.; Ma, W. New knowledge of distribution of horizontal deformation caused by ground movement and “YY” program. J. China Coal Soc. 1987, 1, 5603490. [Google Scholar]
- Barbato, J.; Hebblewhite, B.; Mitra, R.; Mills, K. Prediction of horizontal movement and strain at the surface due to longwall coal mining. Int. J. Rock Mech. Min. Sci. 2016, 84, 105–118. [Google Scholar] [CrossRef]
- Wang, Z. Study on the Non-Linear Prediction Theory of Old Goaf Residual Subsidence and Its Application; China University of Mining and Technology: Beijing, China, 2011. [Google Scholar]
- Chen, B.; Li, Z.; Yu, C.; Fairbairn, D.; Liang, L. Three-dimensional time-varying large surface displacements in coal exploiting areas revealed through integration of SAR pixel offset measurements and mining subsidence model. Remote Sens. Environ. 2020, 240, 111663. [Google Scholar] [CrossRef]
- Heidegger, M. The Basic Problems of Phenomenology; Indiana University Press: Bloomington, IN, USA, 1988. [Google Scholar]
- Holland, J.H. Genetic Algorithms and the Optimal Allocation of Trials. Siam J. Comput. 1973, 2, 88–105. [Google Scholar] [CrossRef]
- Pan, W.T. A new Fruit Fly Optimization Algorithm: Taking the financial distress model as an example. Knowl. Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Lin, S.-M. Analysis of service satisfaction in web auction logistics service using a combination of Fruit fly optimization algorithm and general regression neural network. Neural Comput. Appl. 2013, 22, 783–791. [Google Scholar] [CrossRef]
- Mitić, M.; Vuković, N.; Petrović, M. Chaotic fruit fly optimization algorithm. Knowl. Based Syst. 2015, 89, 446–458. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M.; Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 M_W7.1 Hector Mine Earthquake, California, from space geodetic observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef] [Green Version]
- NASA SRTM Version 3.0 Global 1 Arc Second Dataset. 2015. Available online: https://lpdaac.usgs.gov/documents/179/SRTM_User_Guide_V3.pdf (accessed on 1 October 2015).
- Yang, Z.; Li, Z.; Zhu, J.; Preusse, A.; Hu, J.; Feng, G.; Yi, H.; Papst, M. An Alternative Method for Estimating 3-D Large Displacements of Mining Areas from a Single SAR Amplitude Pair Using Offset Tracking. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3645–3656. [Google Scholar] [CrossRef]
- Taguchi, G. Off-line and on-line quality control systems. In Proceedings of the International Conference on Quality, Tokyo, Japan, 6–12 September 1978; Volume 4, pp. 1–5. [Google Scholar]
- Darling, P. SME Mining Engineering Handbook; SME: Englewood, CO, USA, 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Acquisition Date | Pass Direction | Temporal Baseline/d | Perpendicular Baseline/m | Band | Incidence Angle/° | Heading Angle/° |
|---|---|---|---|---|---|---|---|
| TerraSAR-X | 21 November 2012 | Descending | 132 | −72.52 | X | 42.43 | 189.53 |
| 2 April 2013 | 42.43 | 189.53 |
| Parameter | θ (°) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Initial range | 0.1–1 | 1–3 | 1–3 | 80–90 | 0.1–0.3 | 30–50 | 30–50 | 30–50 | 30–50 | 0–1 |
| Inversion value | 0.62 | 2.06 | 1.68 | 87.9 | 0.27 | 45 | 45 | 46 | 42 | 0.4 |
| Methods | OT-IRMT | OT-CMT | AOT-SAP | Improvement in OT-IRMT vs. OT-CMT | Improvement in OT-IRMT vs. AOT-SAP |
|---|---|---|---|---|---|
| Vertical RMSE | 6.8 cm | 7.3 cm | 17.2 cm | 6.8% | 60.4% |
| Horizontal RMSE | 7.1 cm | 8.7 cm | 14.7 cm | 18.4% | 51.7% |
| Parameters | qa | s | ||||
|---|---|---|---|---|---|---|
| True values | 0.75 | 2.0 | 1.5 | 85 | 20 | 0.4 |
| Range of values | 0.65 | 1.5 | 1.0 | 85 | 20 | 0.2 |
| 0.75 | 2.0 | 1.2 | 86 | 25 | 0.3 | |
| 0.85 | 2.5 | 1.5 | 87 | 30 | 0.4 |
| Experiment Number | qa | s | ||||
|---|---|---|---|---|---|---|
| 1 | 0.65 | 1.5 | 1.0 | 85 | 20 | 0.2 |
| 2 | 0.65 | 1.5 | 1.0 | 85 | 25 | 0.3 |
| 3 | 0.65 | 1.5 | 1.0 | 85 | 30 | 0.4 |
| 4 | 0.65 | 2.0 | 1.2 | 86 | 20 | 0.2 |
| 5 | 0.65 | 2.0 | 1.2 | 86 | 25 | 0.3 |
| 6 | 0.65 | 2.0 | 1.2 | 86 | 30 | 0.4 |
| 7 | 0.65 | 2.5 | 1.5 | 87 | 20 | 0.2 |
| 8 | 0.65 | 2.5 | 1.5 | 87 | 25 | 0.3 |
| 9 | 0.65 | 2.5 | 1.5 | 87 | 30 | 0.4 |
| 10 | 0.75 | 1.5 | 1.2 | 87 | 20 | 0.3 |
| 11 | 0.75 | 1.5 | 1.2 | 87 | 25 | 0.4 |
| 12 | 0.75 | 1.5 | 1.2 | 87 | 30 | 0.2 |
| 13 | 0.75 | 2.0 | 1.5 | 85 | 20 | 0.3 |
| 14 | 0.75 | 2.0 | 1.5 | 85 | 25 | 0.4 |
| 15 | 0.75 | 2.0 | 1.5 | 85 | 30 | 0.2 |
| 16 | 0.75 | 2.5 | 1.0 | 86 | 20 | 0.3 |
| 17 | 0.75 | 2.5 | 1.0 | 86 | 25 | 0.4 |
| 18 | 0.75 | 2.5 | 1.0 | 86 | 30 | 0.2 |
| 19 | 0.85 | 1.5 | 1.5 | 86 | 20 | 0.4 |
| 20 | 0.85 | 1.5 | 1.5 | 86 | 25 | 0.2 |
| 21 | 0.85 | 1.5 | 1.5 | 86 | 30 | 0.3 |
| 22 | 0.85 | 2.0 | 1.0 | 87 | 20 | 0.4 |
| 23 | 0.85 | 2.0 | 1.0 | 87 | 25 | 0.2 |
| 24 | 0.85 | 2.0 | 1.0 | 87 | 30 | 0.3 |
| 25 | 0.85 | 2.5 | 1.2 | 85 | 20 | 0.4 |
| 26 | 0.85 | 2.5 | 1.2 | 85 | 25 | 0.2 |
| 27 | 0.85 | 2.5 | 1.2 | 85 | 30 | 0.3 |
| Vertical | SS/106 | df | F | p |
|---|---|---|---|---|
| Intercept | 1.52 | 1 | 301.927 | 0.000 ** |
| qa | 0.10 | 2 | 9.675 | 0.002 ** |
| tanβ1 | 0.04 | 2 | 4.038 | 0.041 * |
| tanβ2 | 0.08 | 2 | 7.893 | 0.005 ** |
| θ | 0.05 | 2 | 5.388 | 0.018 * |
| s | 0.01 | 2 | 1.033 | 0.042 |
| ρ | 0.03 | 2 | 2.497 | 0.118 |
| Residual | 0.07 | 14 | R2 = 0.813 | * p < 0.05, ** p < 0.01 |
| Easting | SS/106 | df | F | p |
| Intercept | 3.36 | 1 | 151.468 | 0.000 ** |
| qa | 0.04 | 2 | 0.944 | 0.413 |
| tanβ1 | 0.19 | 2 | 4.174 | 0.038 * |
| tanβ2 | 0.09 | 2 | 1.997 | 0.173 |
| θ | 0.01 | 2 | 0.239 | 0.791 |
| s | 0.00 | 2 | 0.089 | 0.915 |
| ρ | 2.24 | 2 | 50.459 | 0.000 ** |
| Residual | 0.31 | 14 | R2 = 0.892 | * p < 0.05, ** p < 0.01 |
| Northing | SS/106 | df | F | p |
| Intercept | 7.44 | 1 | 106.074 | 0.000 ** |
| qa | 0.20 | 2 | 1.406 | 0.278 |
| tanβ1 | 0.56 | 2 | 4.026 | 0.042 * |
| tanβ2 | 0.25 | 2 | 1.751 | 0.210 |
| θ | 0.04 | 2 | 0.303 | 0.743 |
| s | 0.03 | 2 | 0.225 | 0.801 |
| ρ | 5.09 | 2 | 36.307 | 0.000 ** |
| Residual | 0.98 | 14 | R2 = 0.863 | * p < 0.05, ** p < 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Mei, H.; Li, Z.; Wang, Z.; Yu, Y.; Yu, H. Retrieving Three-Dimensional Large Surface Displacements in Coal Mining Areas by Combining SAR Pixel Offset Measurements with an Improved Mining Subsidence Model. Remote Sens. 2021, 13, 2541. https://doi.org/10.3390/rs13132541
Chen B, Mei H, Li Z, Wang Z, Yu Y, Yu H. Retrieving Three-Dimensional Large Surface Displacements in Coal Mining Areas by Combining SAR Pixel Offset Measurements with an Improved Mining Subsidence Model. Remote Sensing. 2021; 13(13):2541. https://doi.org/10.3390/rs13132541
Chicago/Turabian StyleChen, Bingqian, Han Mei, Zhenhong Li, Zhengshuai Wang, Yang Yu, and Hao Yu. 2021. "Retrieving Three-Dimensional Large Surface Displacements in Coal Mining Areas by Combining SAR Pixel Offset Measurements with an Improved Mining Subsidence Model" Remote Sensing 13, no. 13: 2541. https://doi.org/10.3390/rs13132541
APA StyleChen, B., Mei, H., Li, Z., Wang, Z., Yu, Y., & Yu, H. (2021). Retrieving Three-Dimensional Large Surface Displacements in Coal Mining Areas by Combining SAR Pixel Offset Measurements with an Improved Mining Subsidence Model. Remote Sensing, 13(13), 2541. https://doi.org/10.3390/rs13132541