
DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements


Abstract
:1. Introduction
2. DESIS and RadCalNet Overview
2.1. DESIS
2.2. RadCalNet
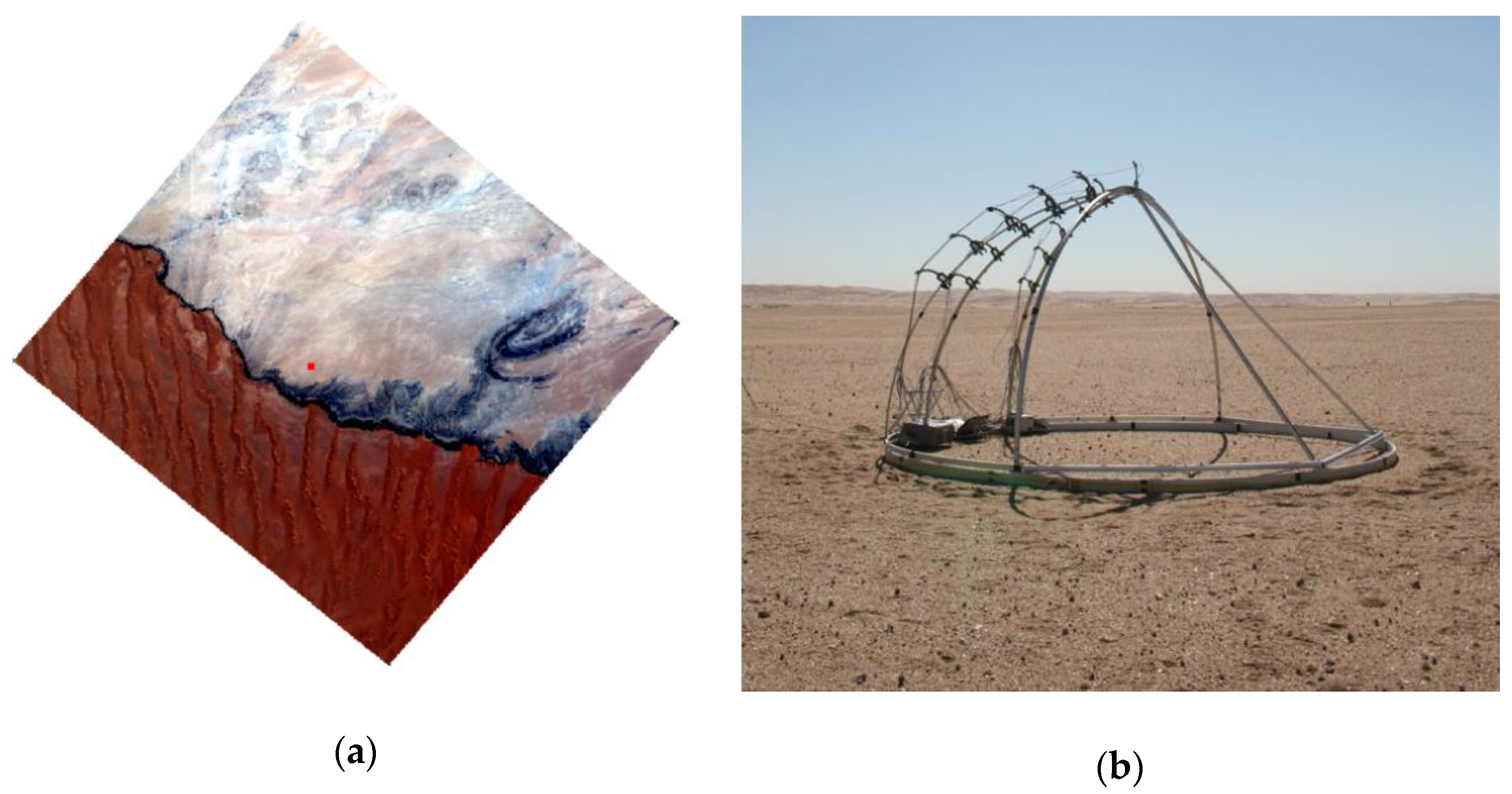
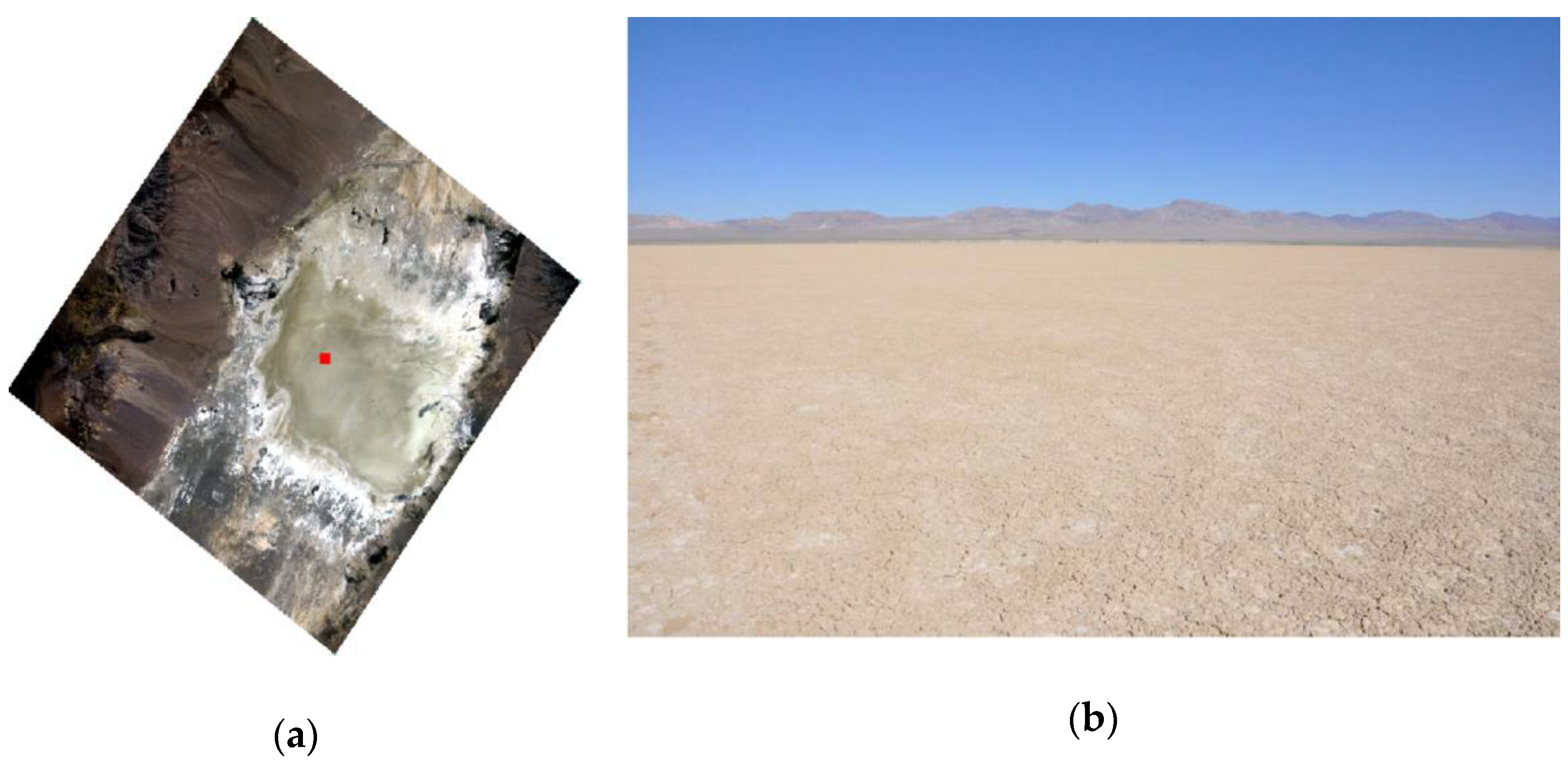
2.2.1. Railroad Valley Playa
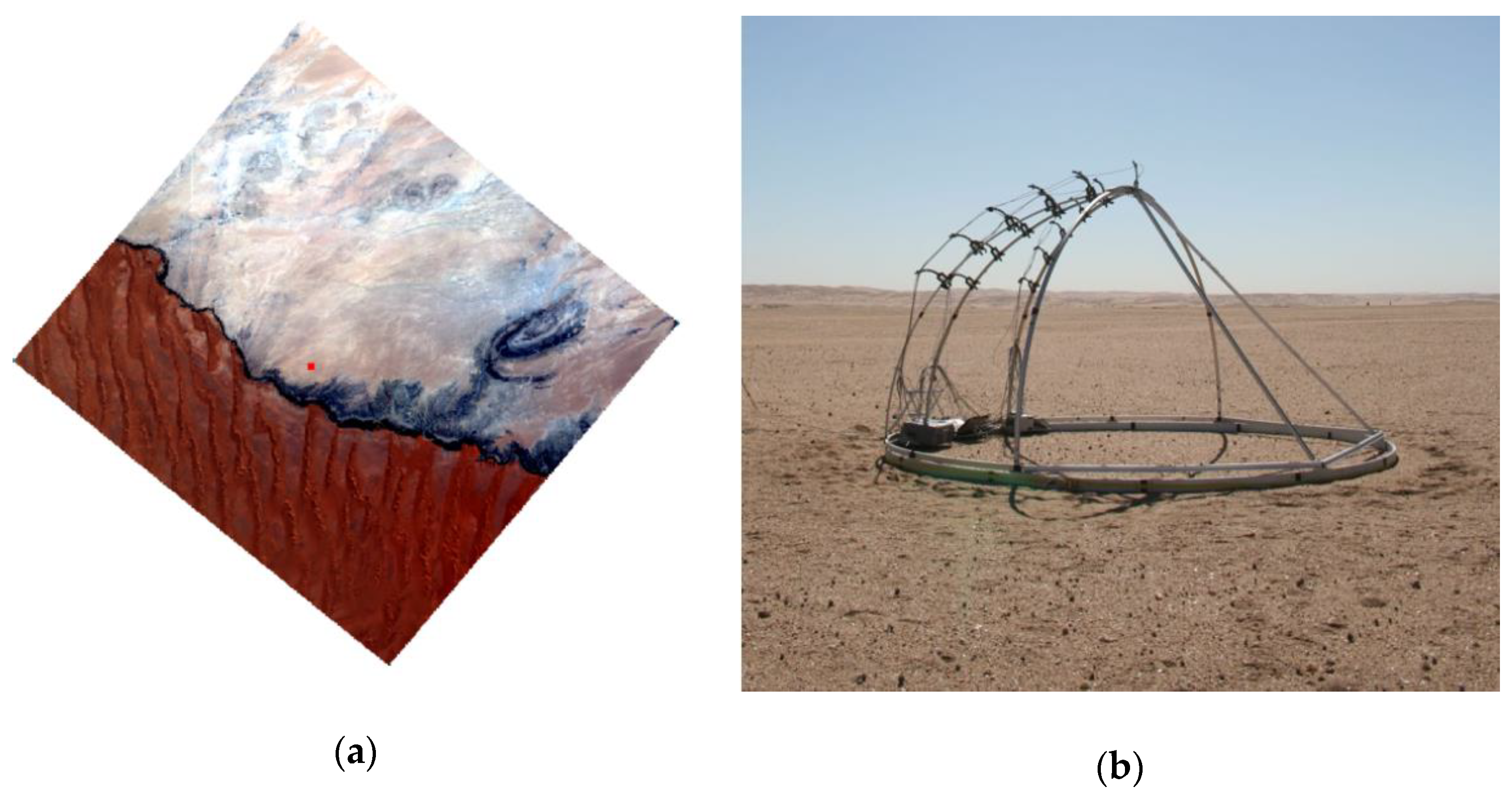
2.2.2. Gobabeb
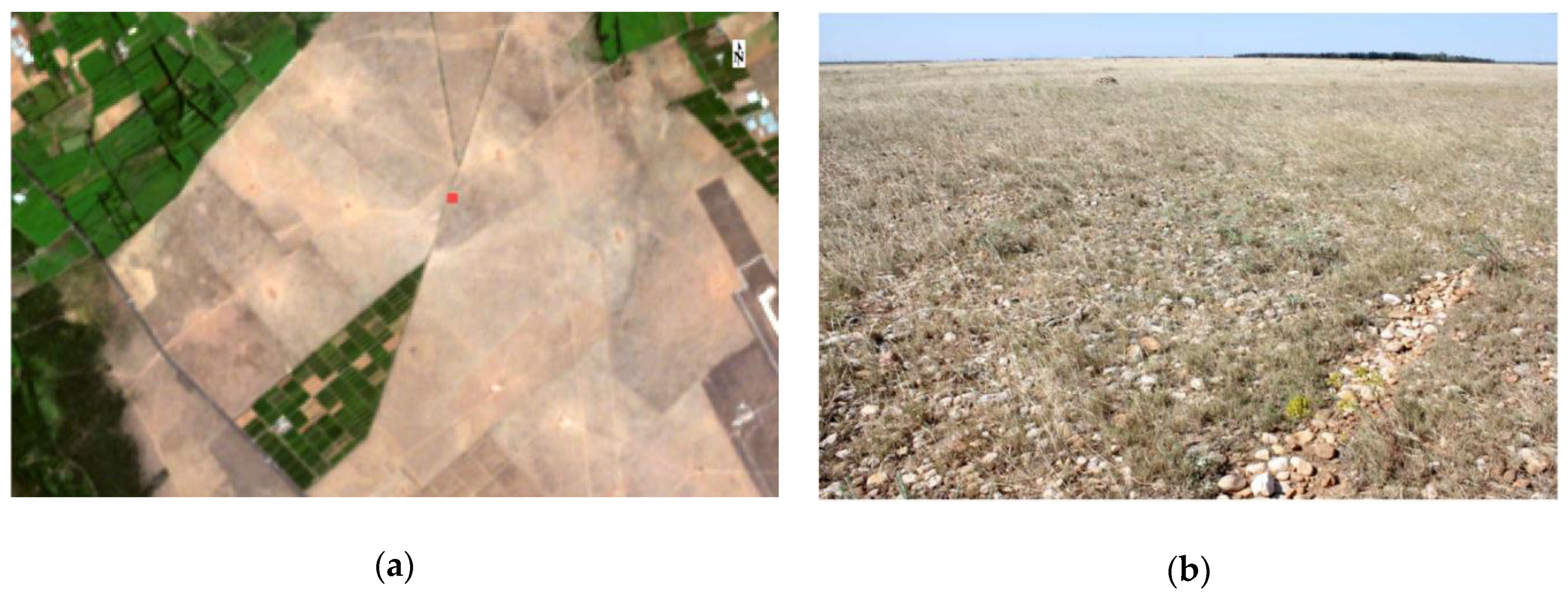
2.2.3. La Crau
2.2.4. Baotau Sand
3. Materials and Methods
3.1. Data Selection
3.2. Data Screening
3.3. Image Region of Interest (ROI) Extraction
3.4. Conversion to TOA Reflectance
4. Results
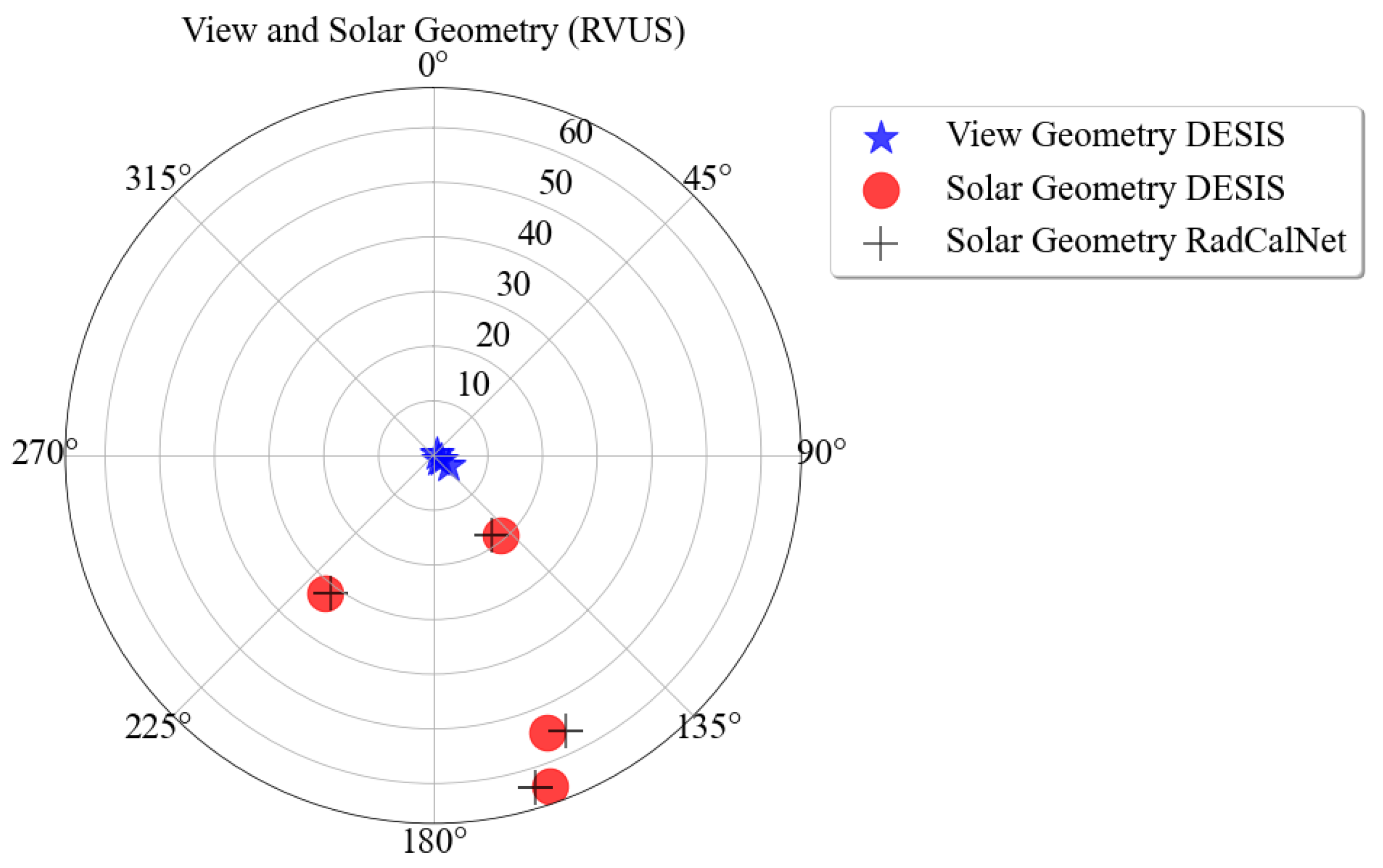
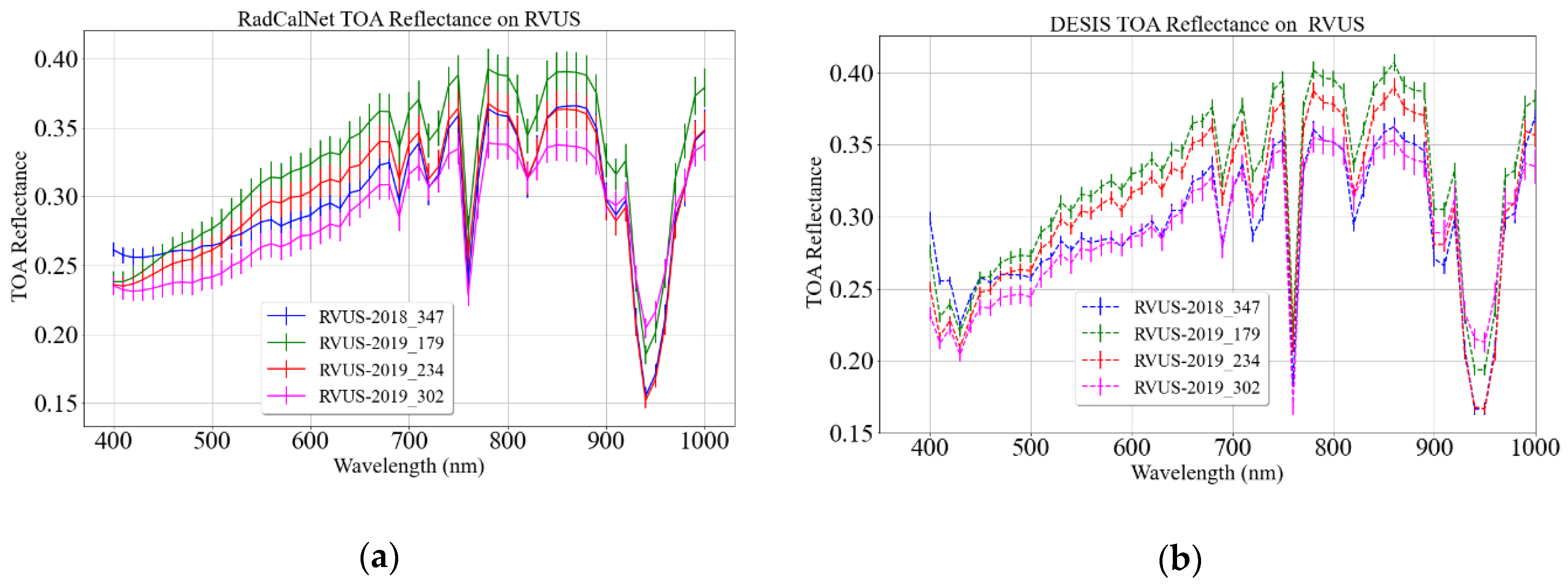
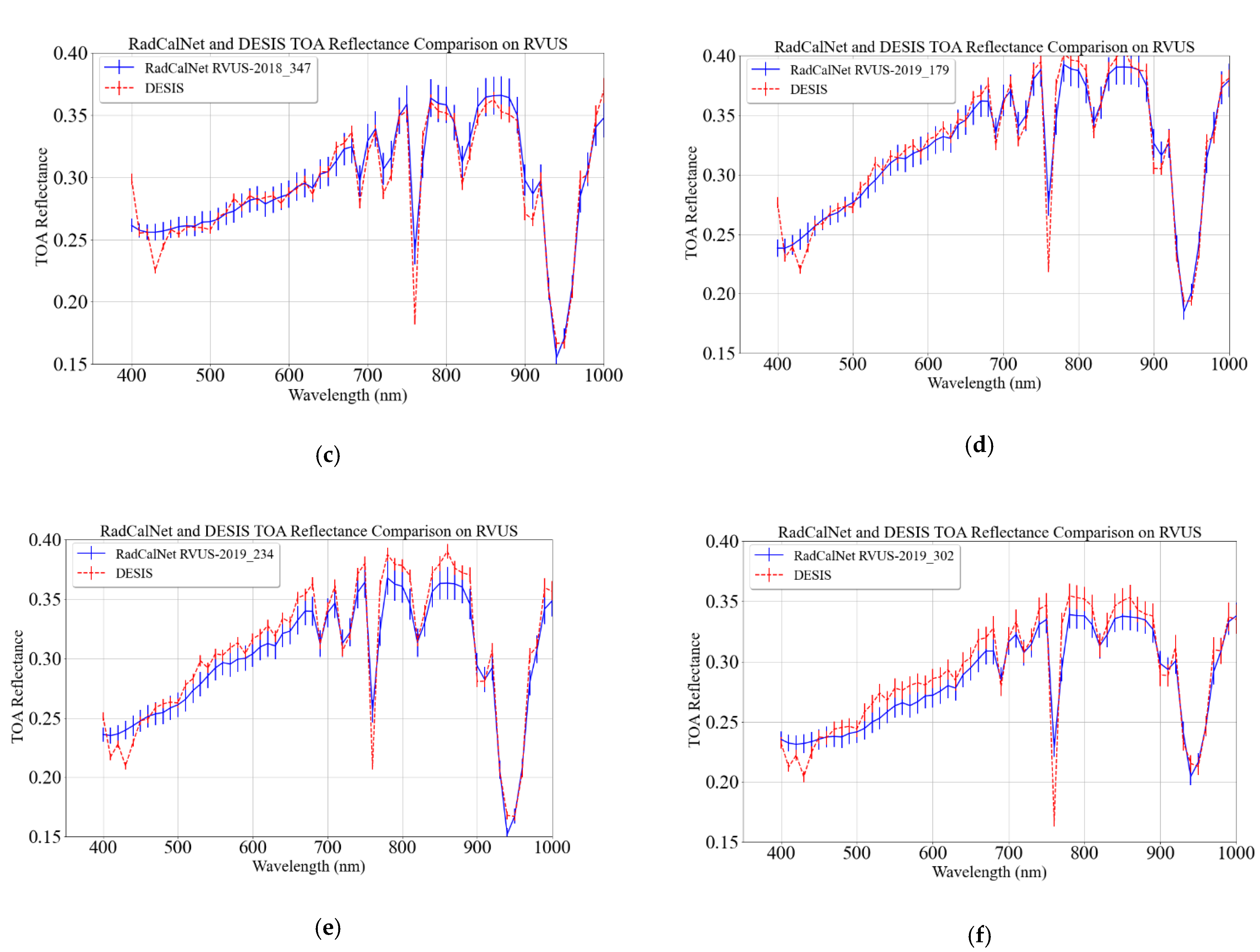
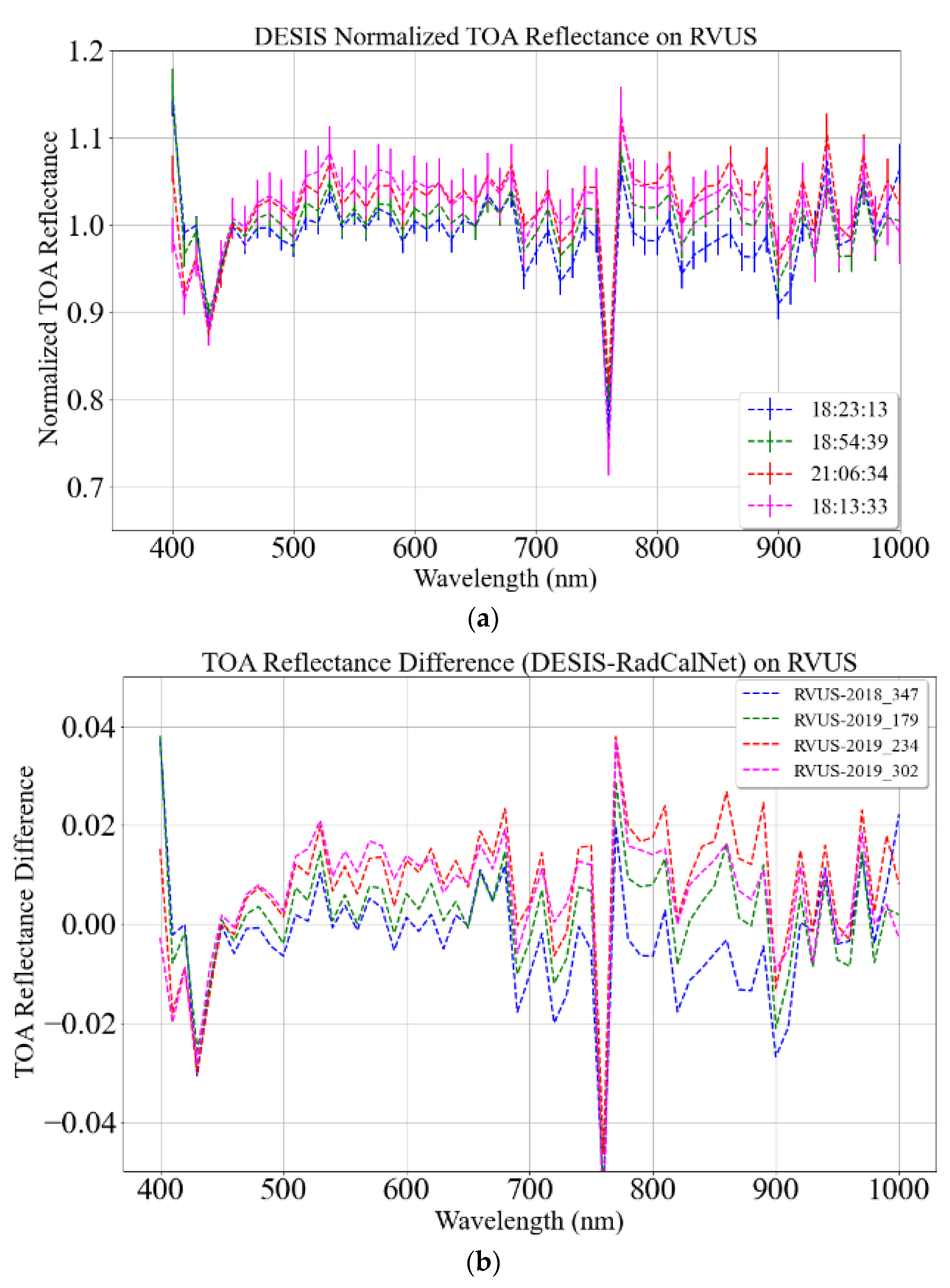
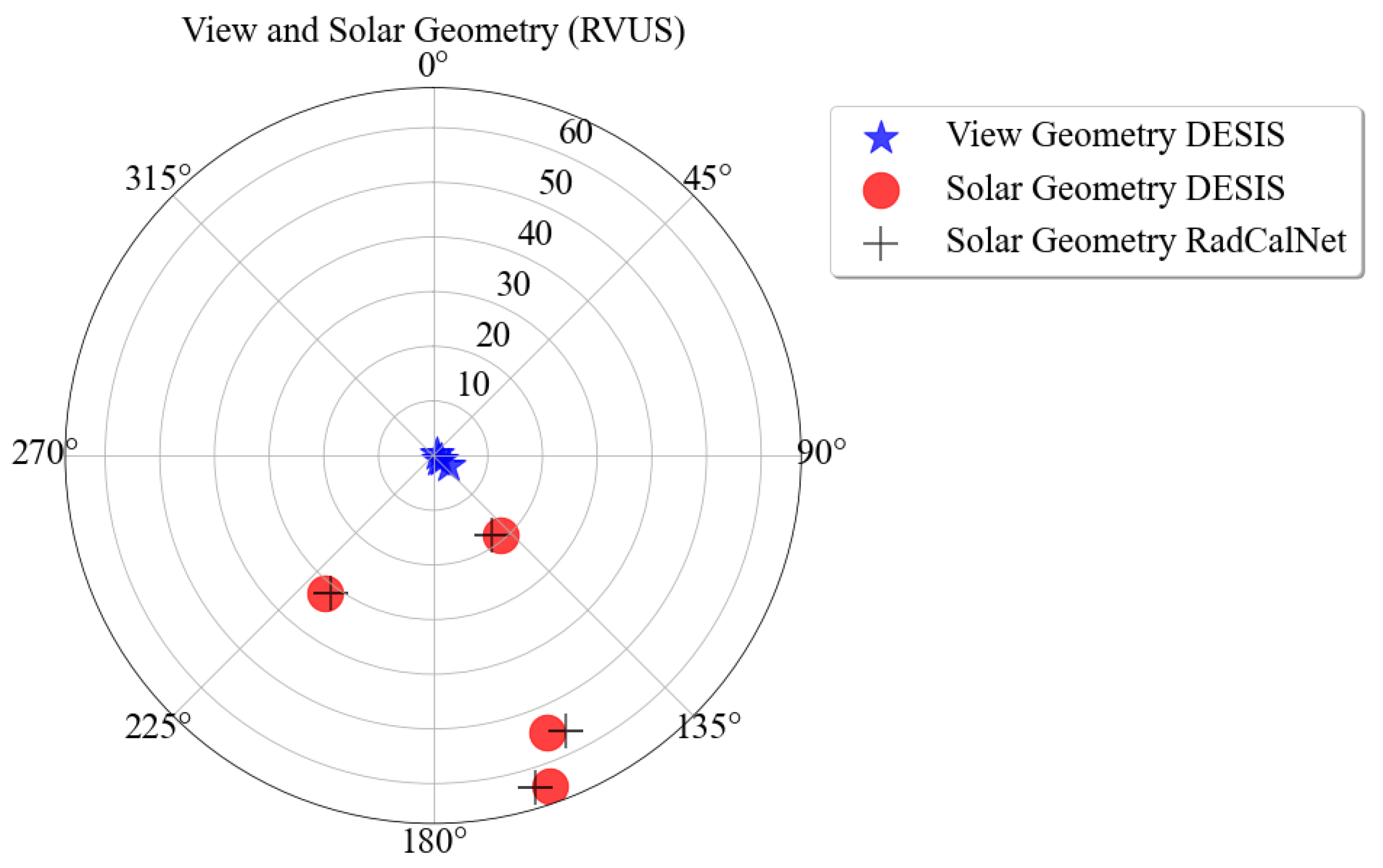
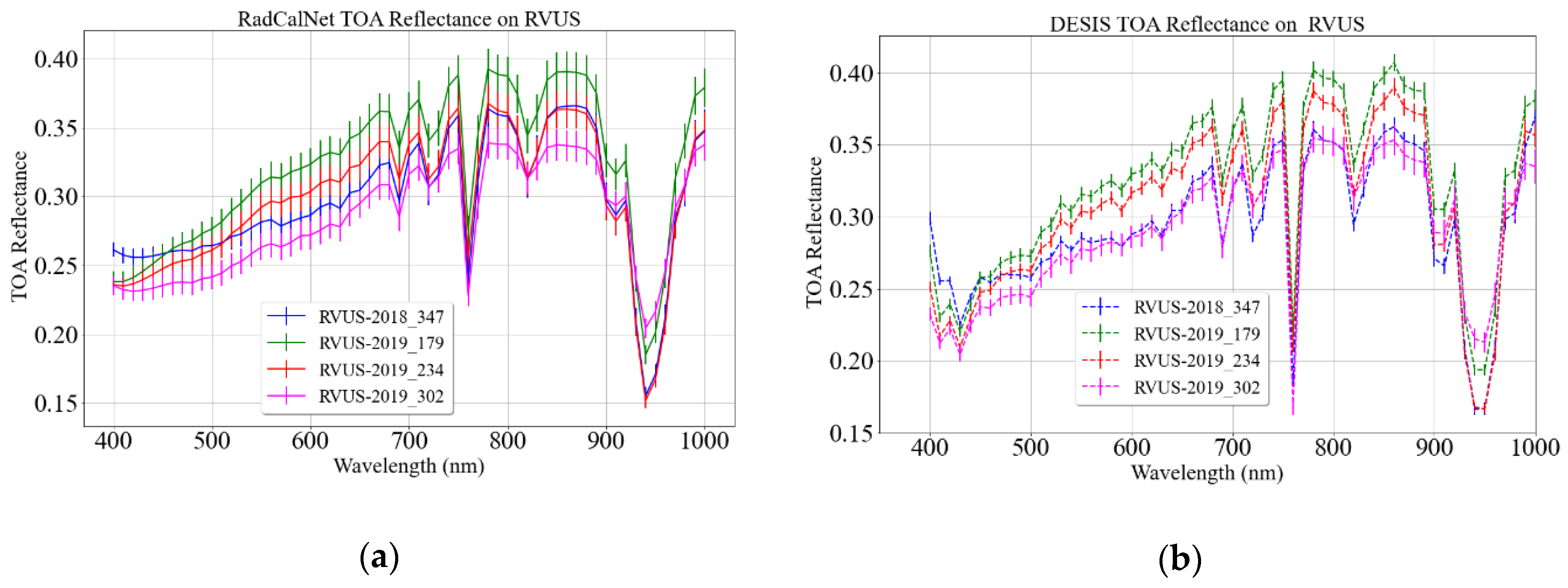
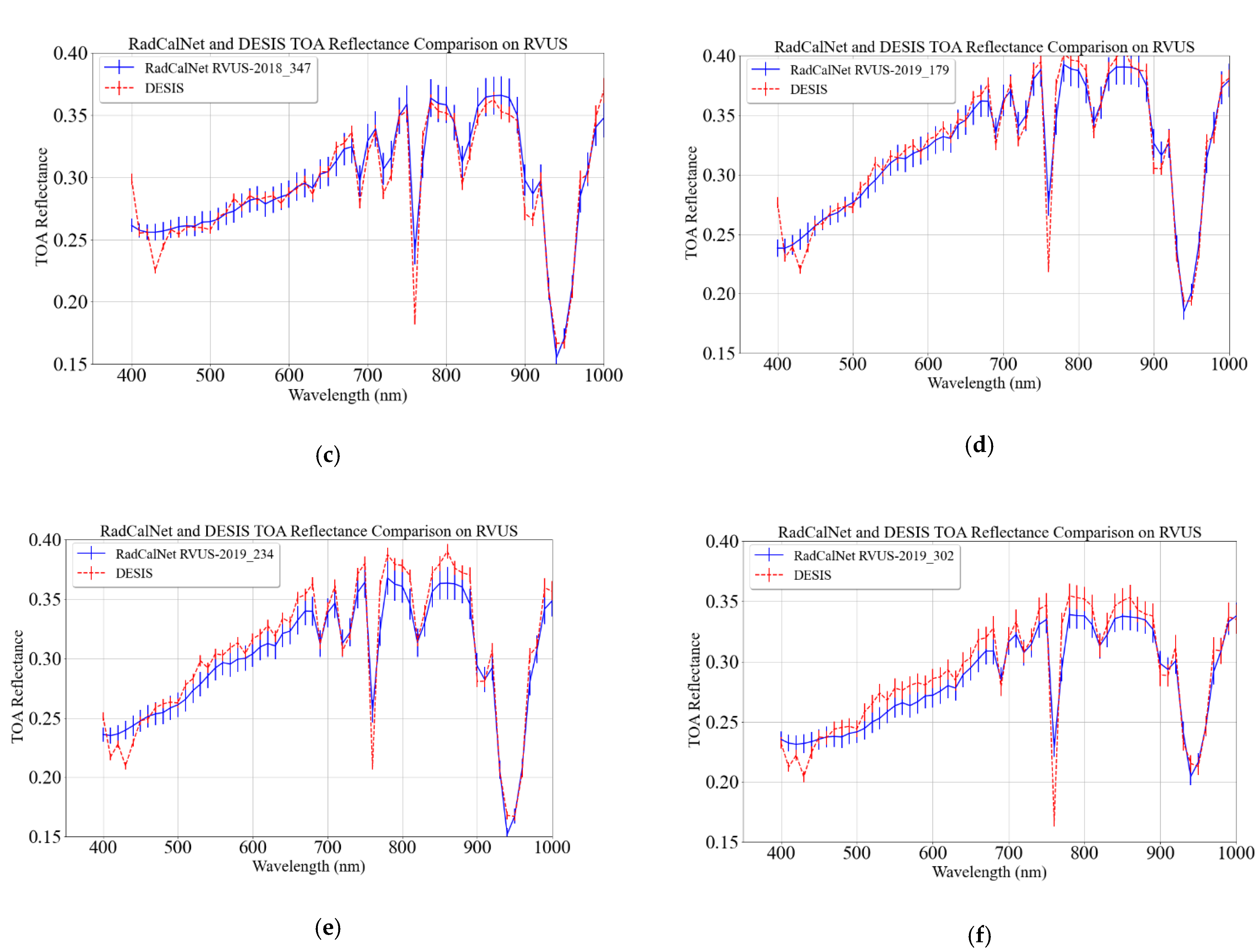
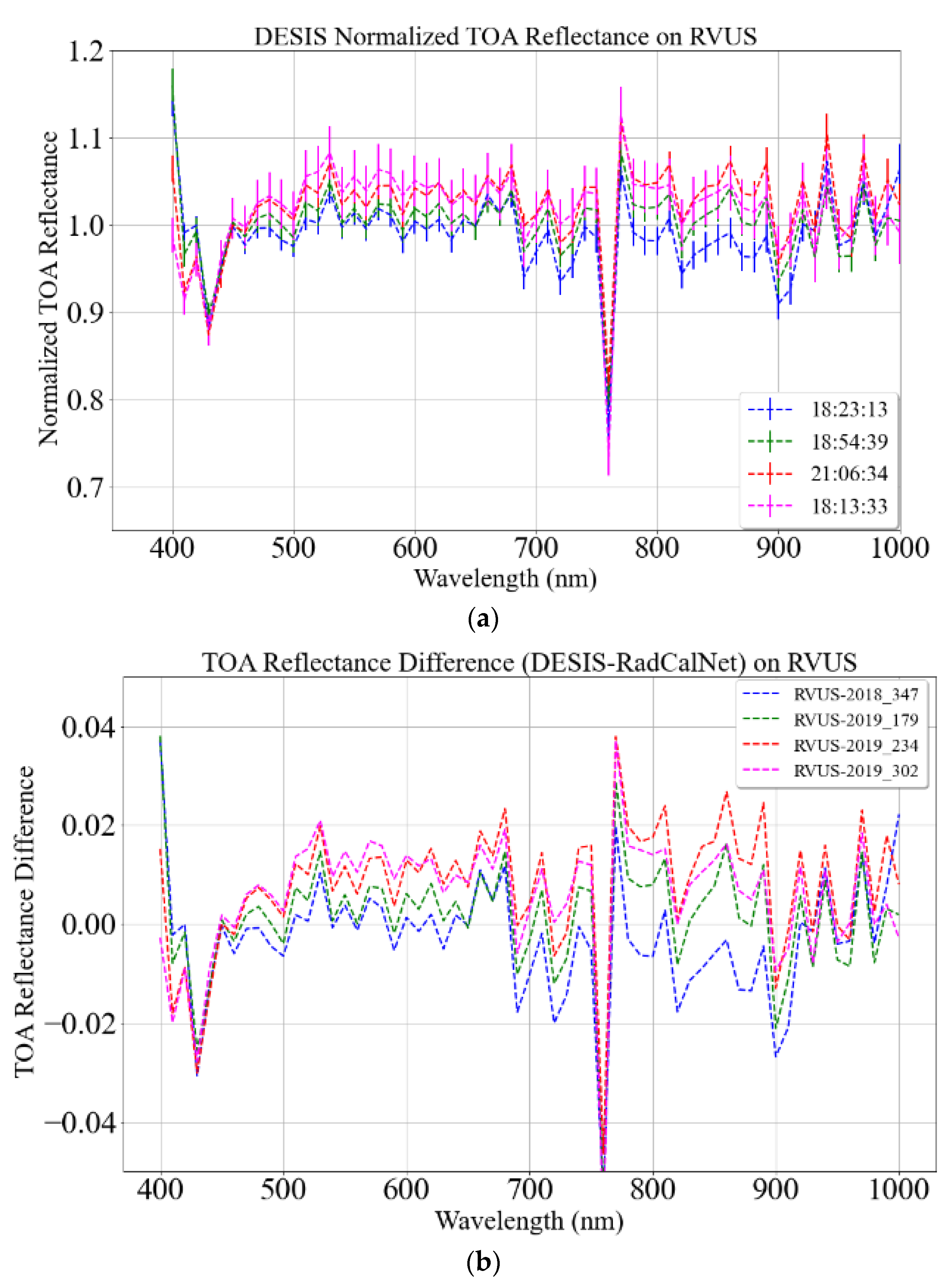
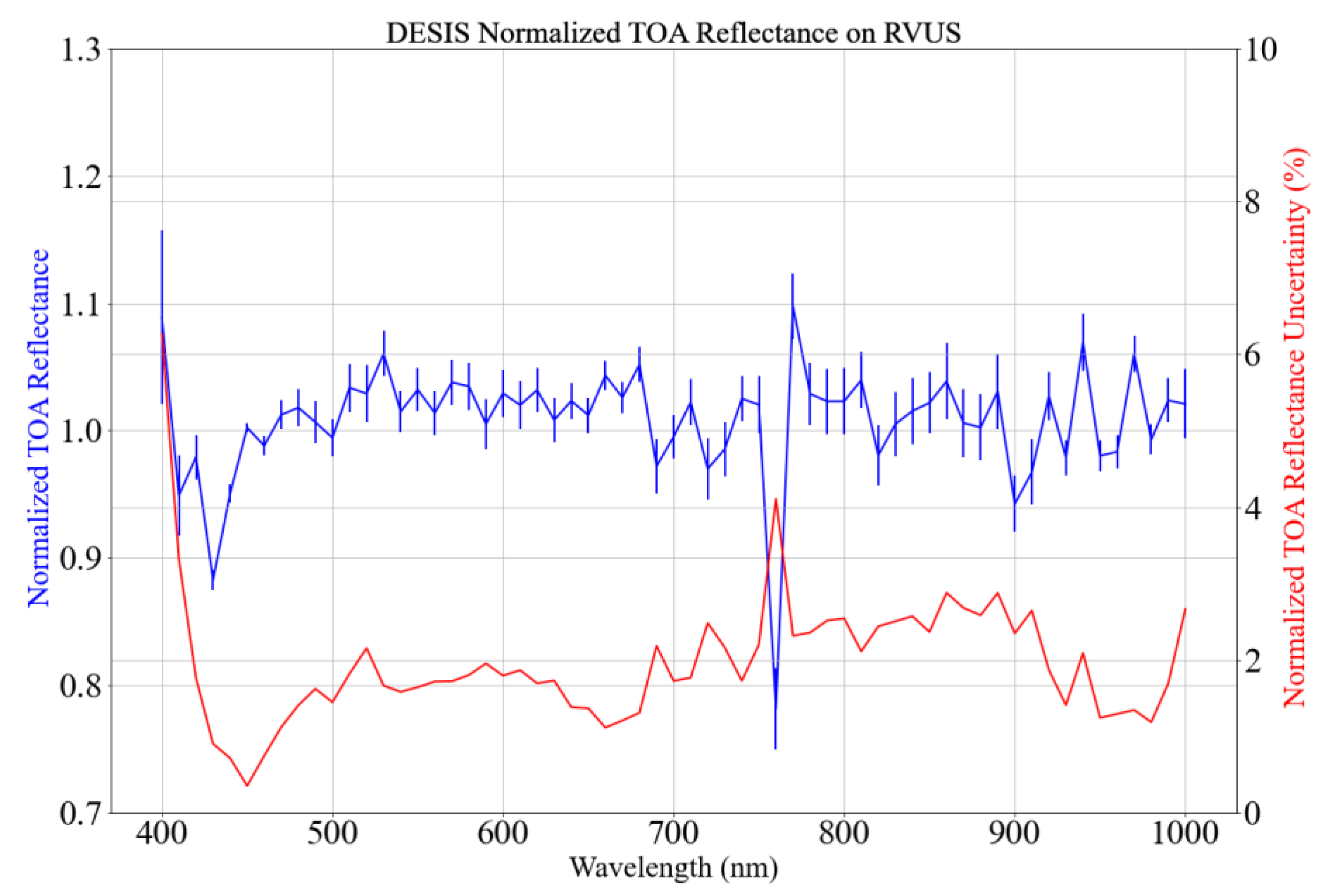
4.1. Comparison on Railroad Valley Playa (RVUS)
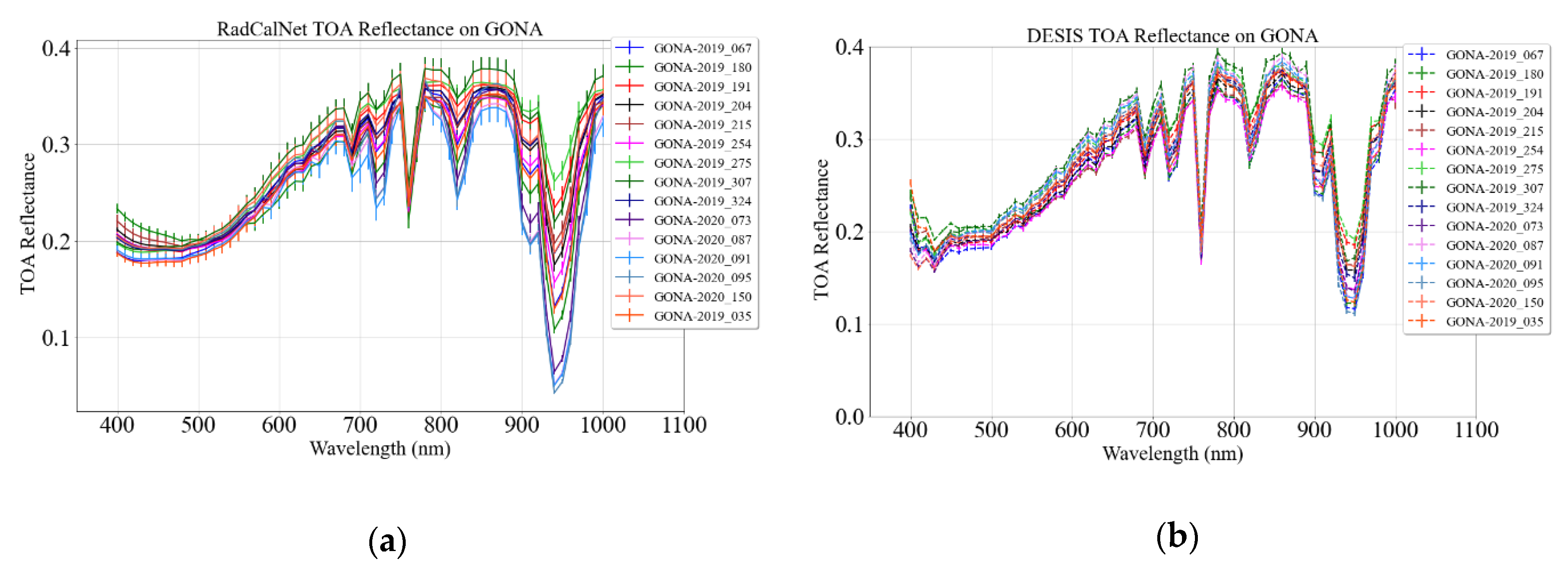
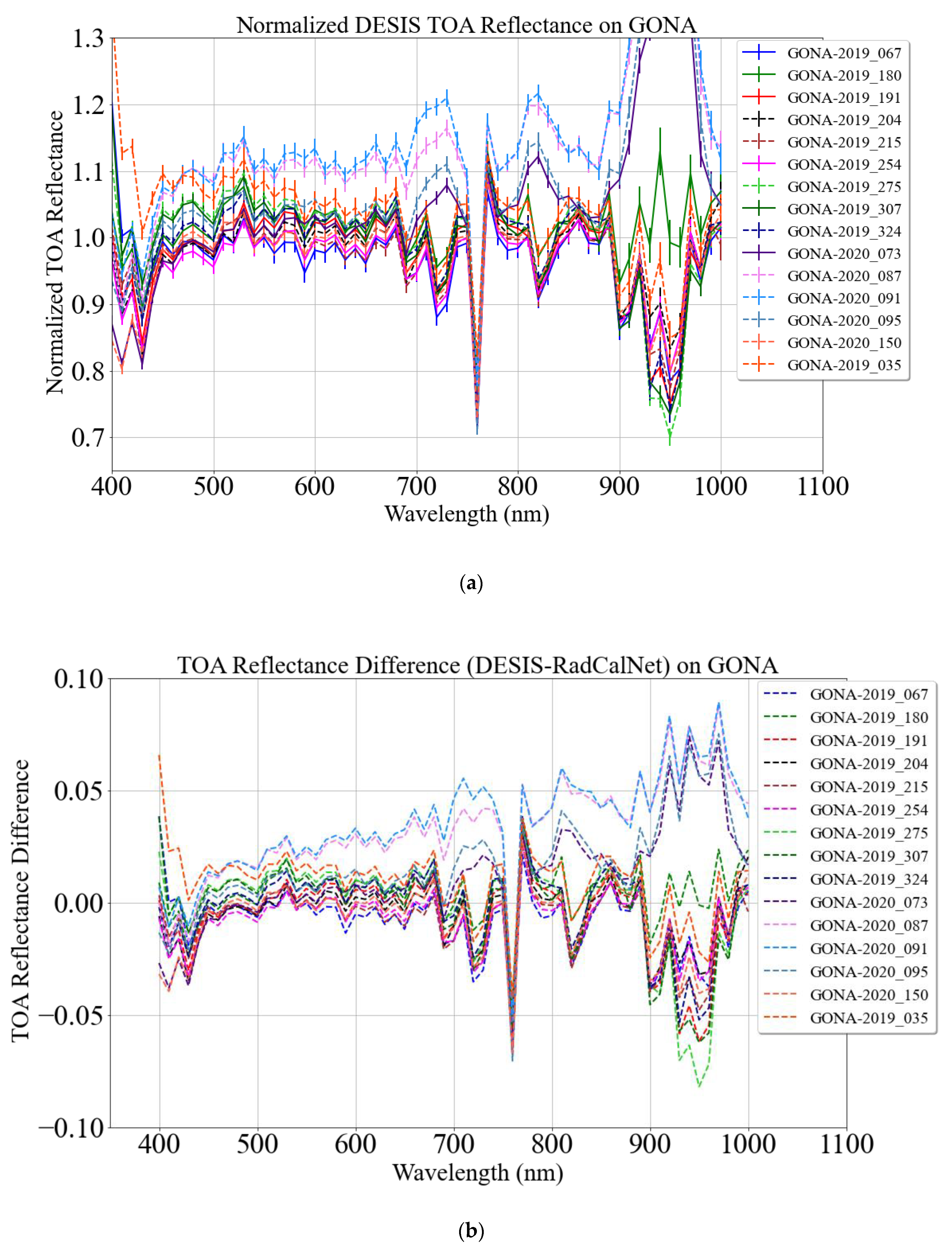
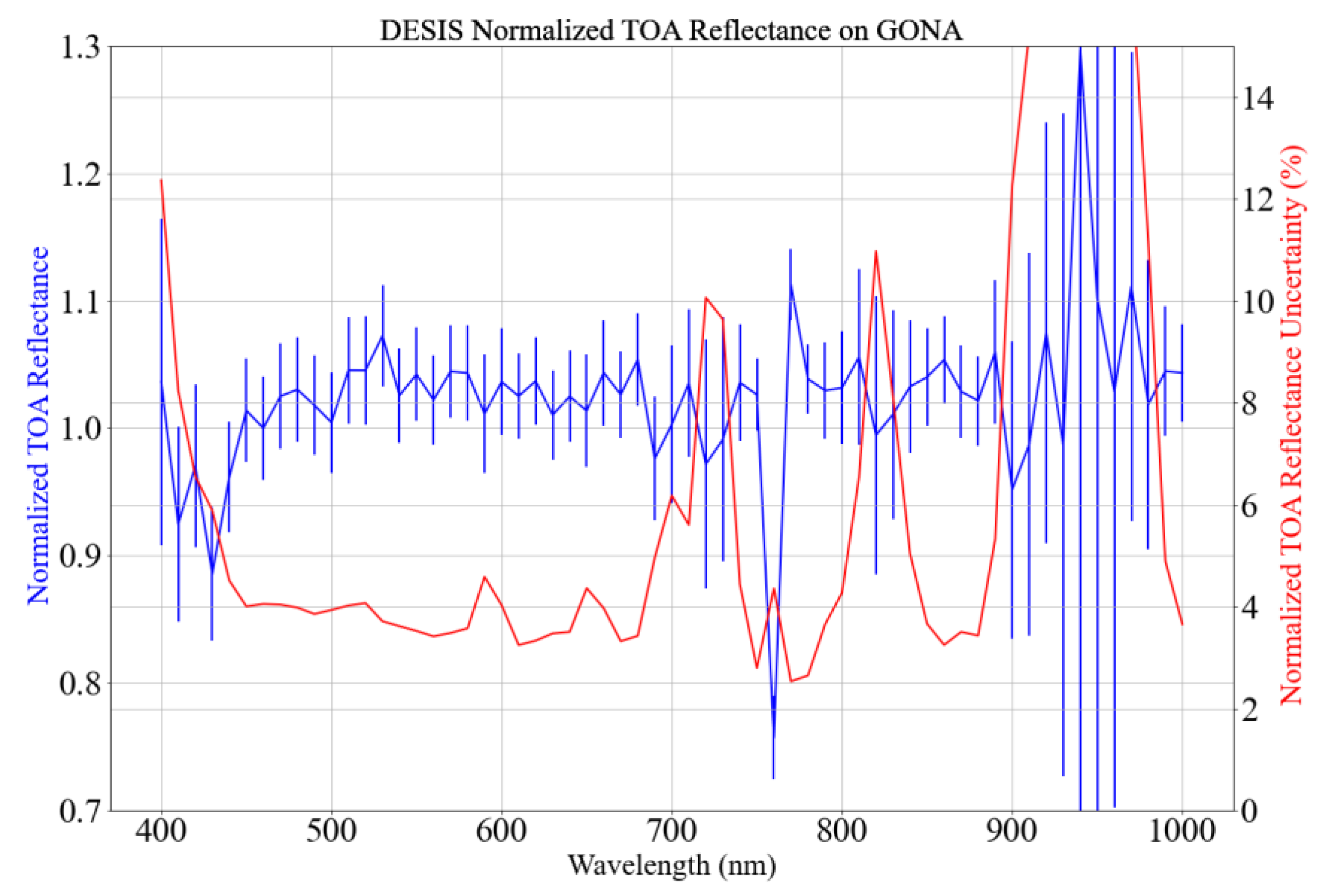
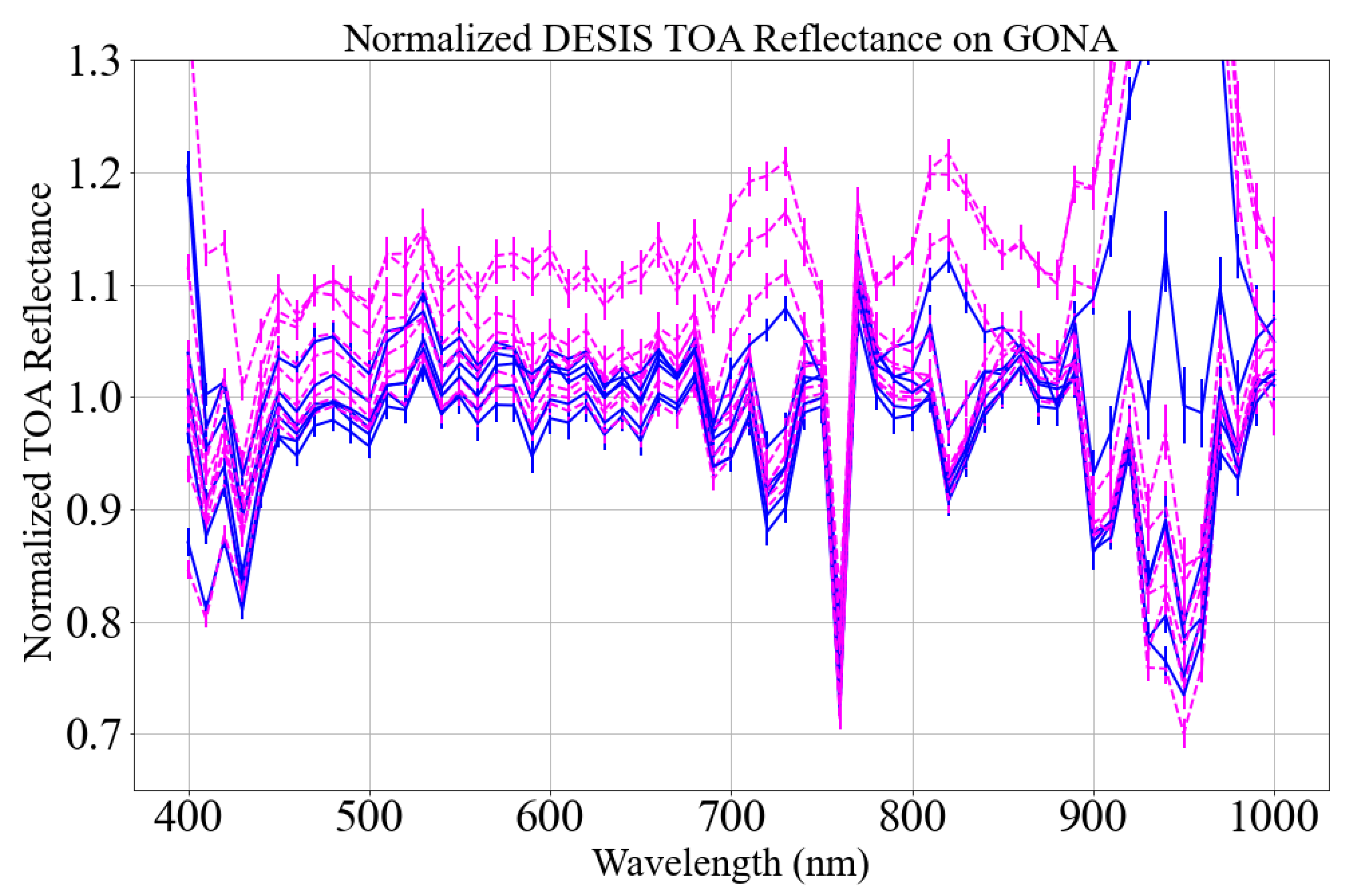
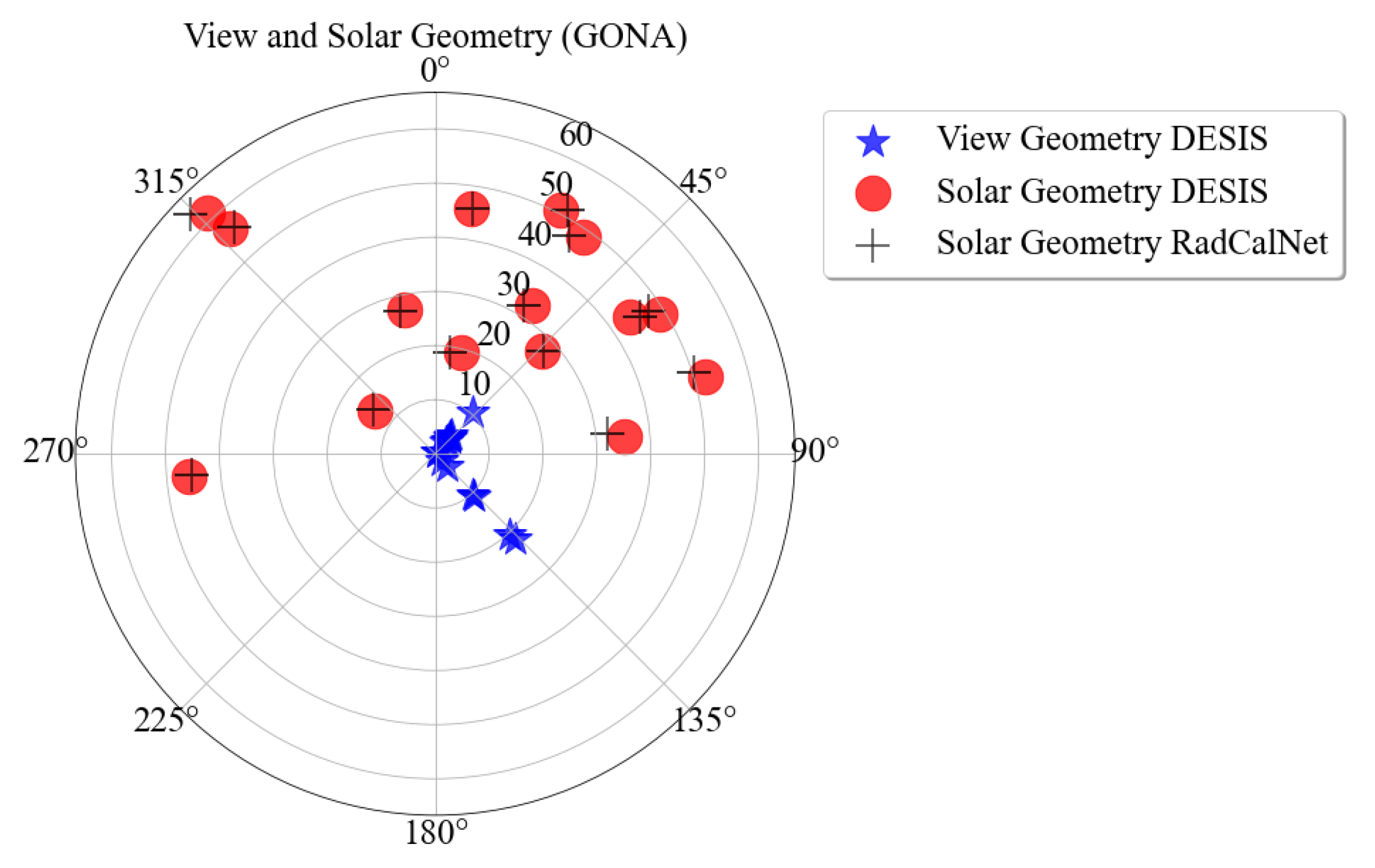
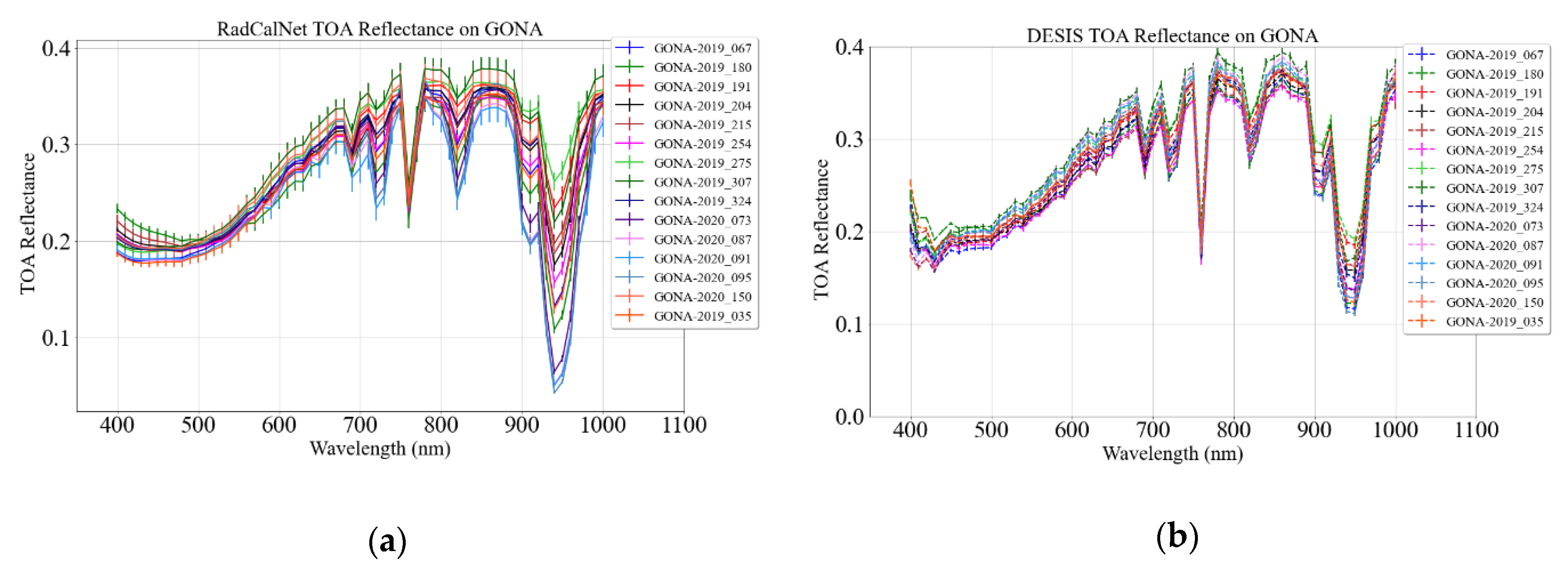
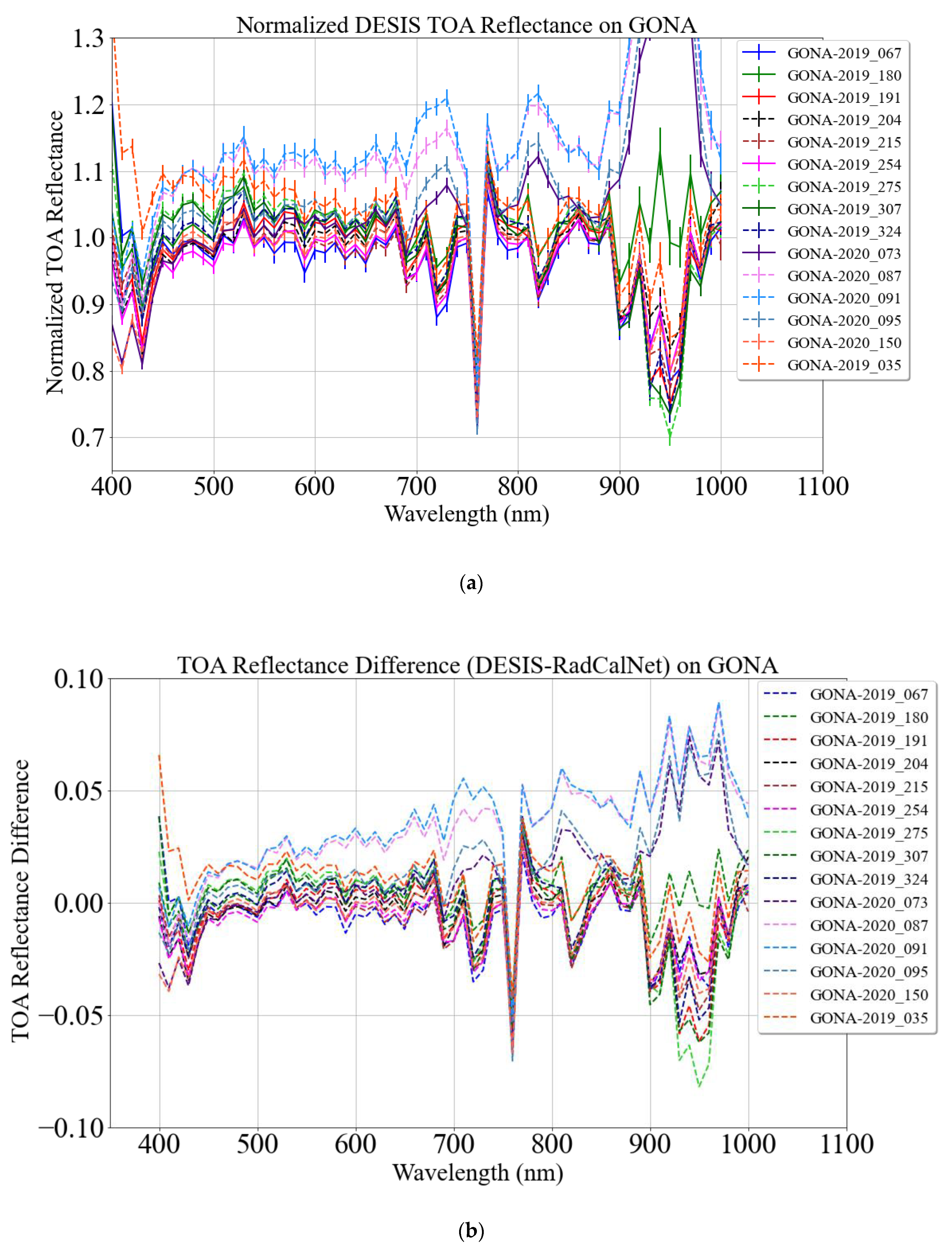
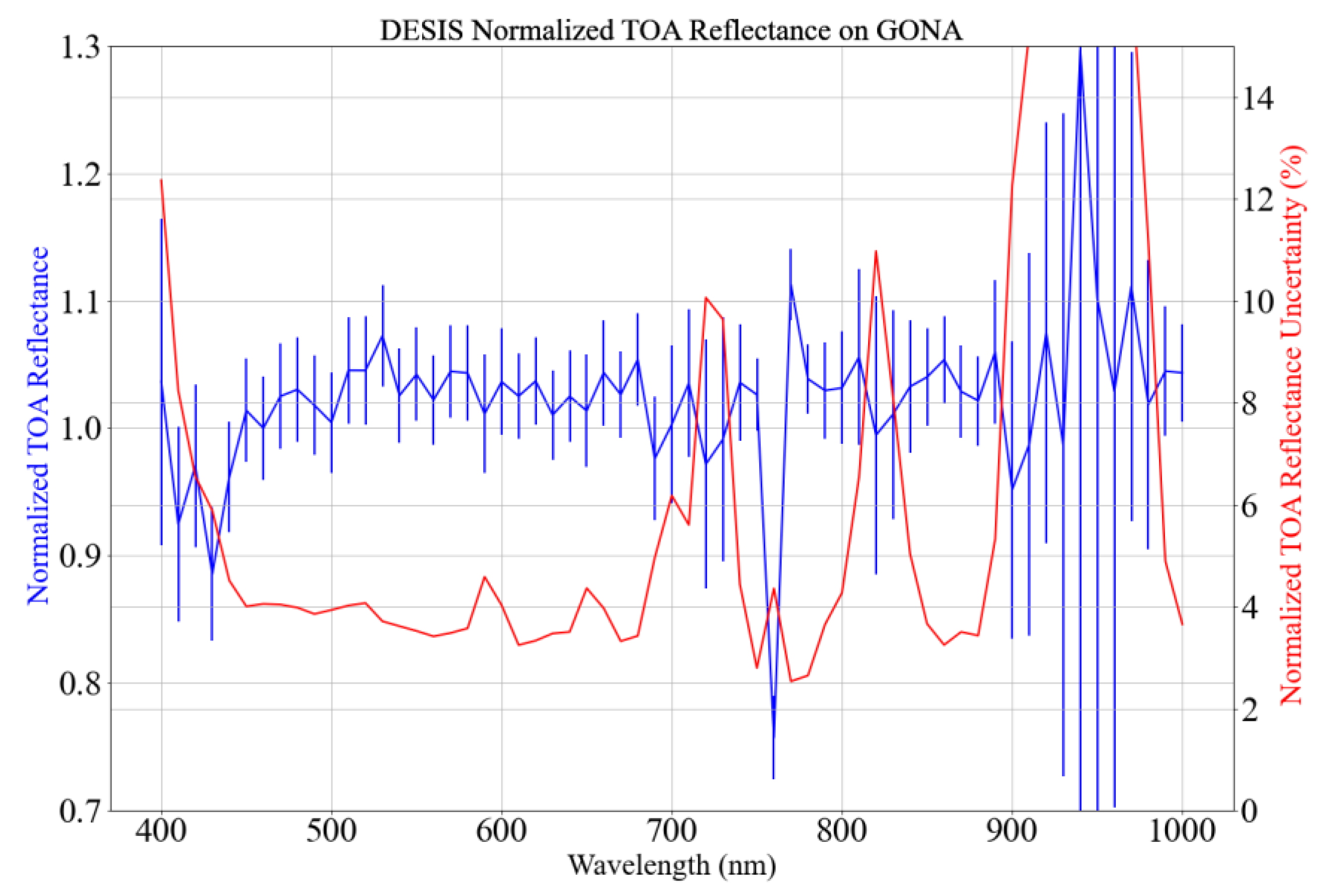
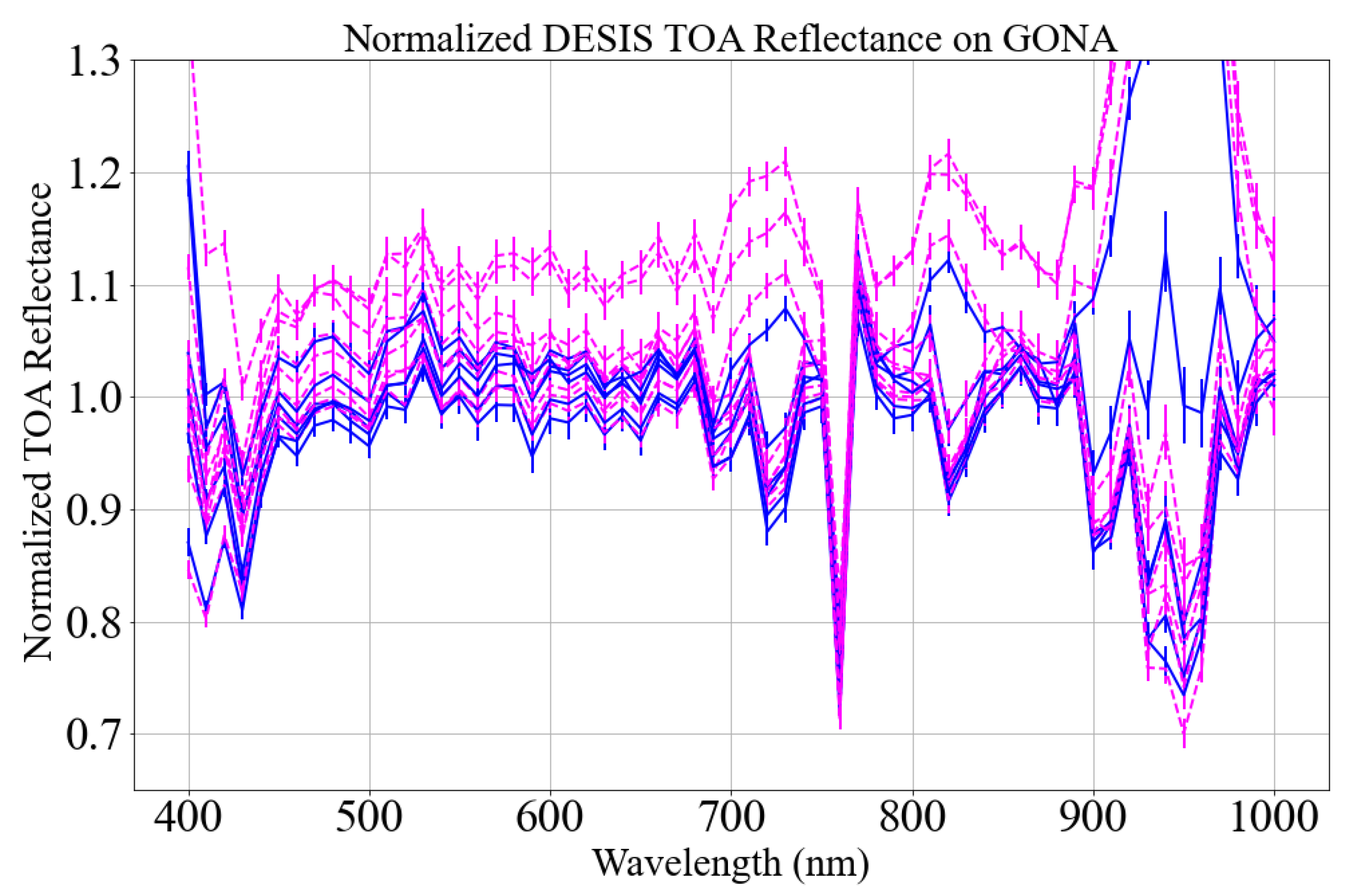
4.2. Comparison on GONA
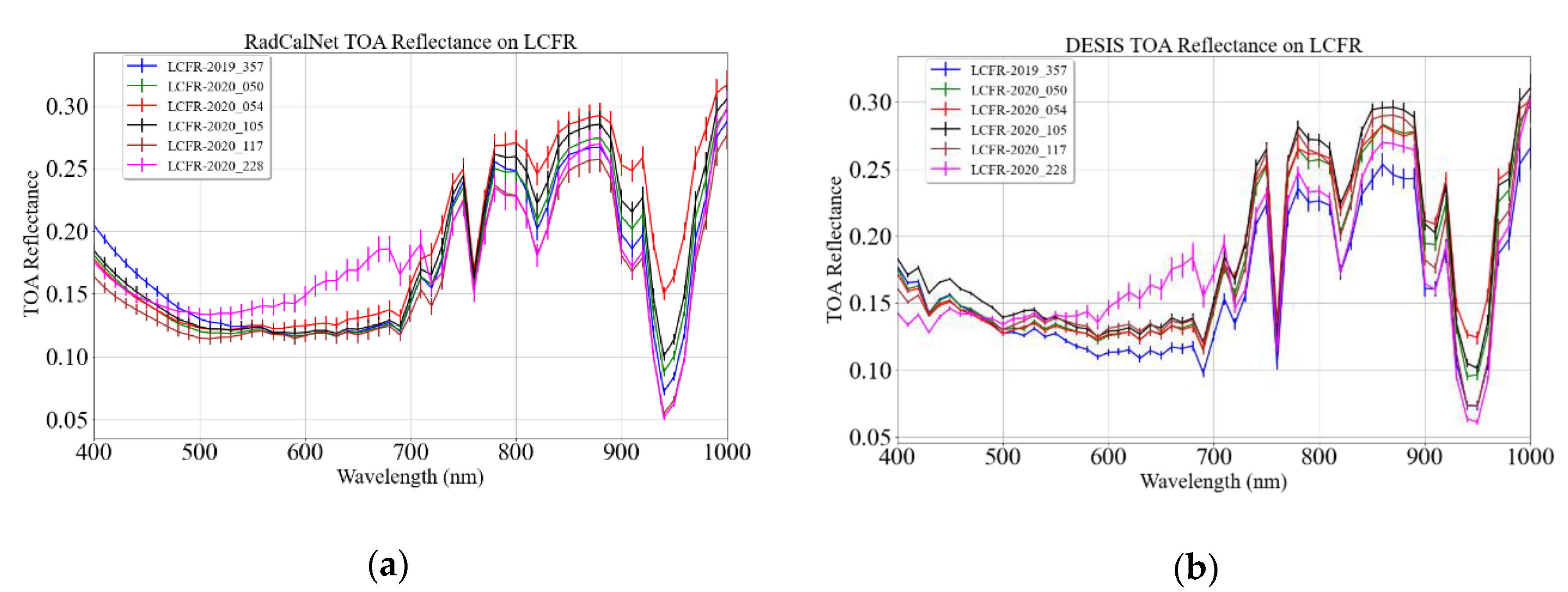
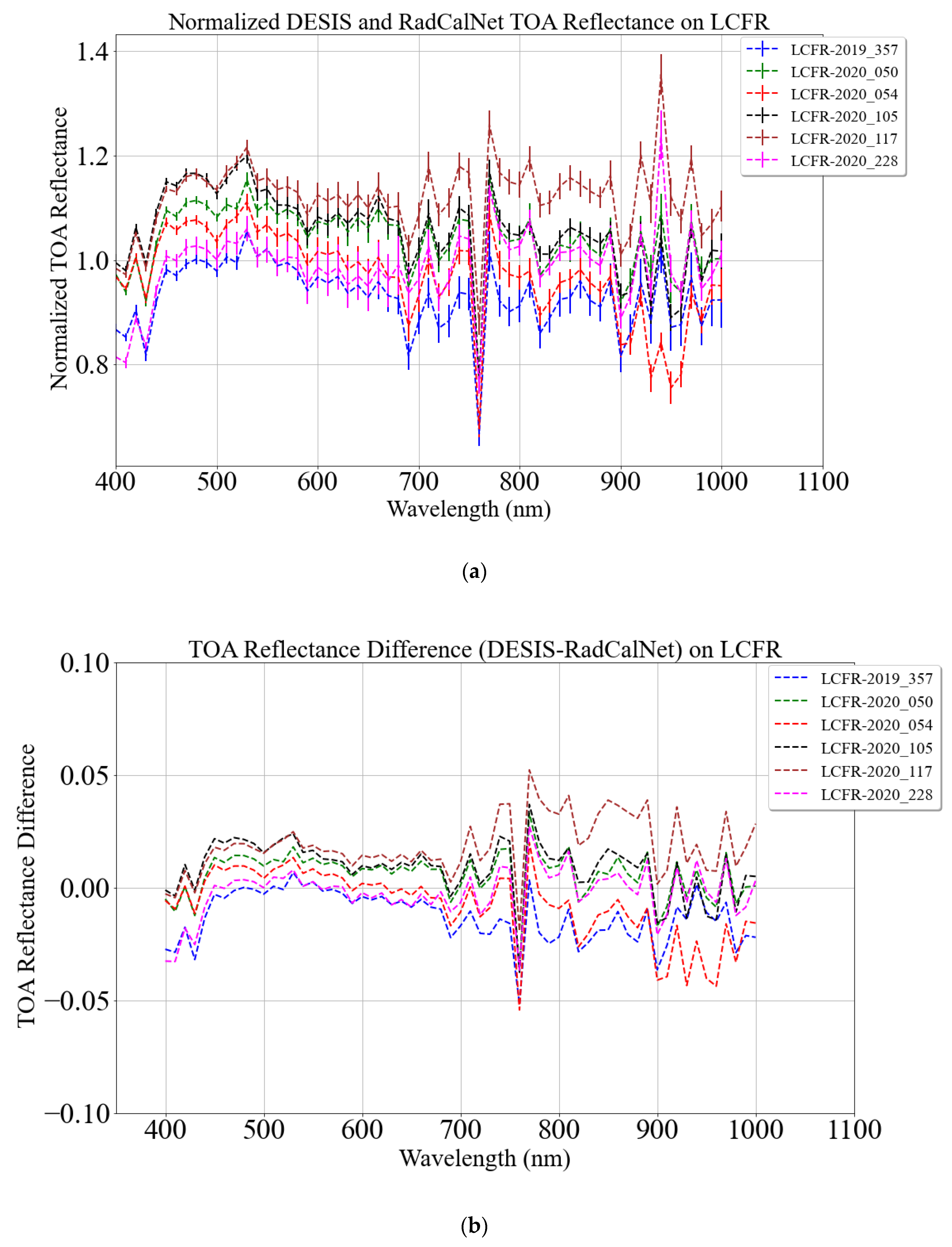
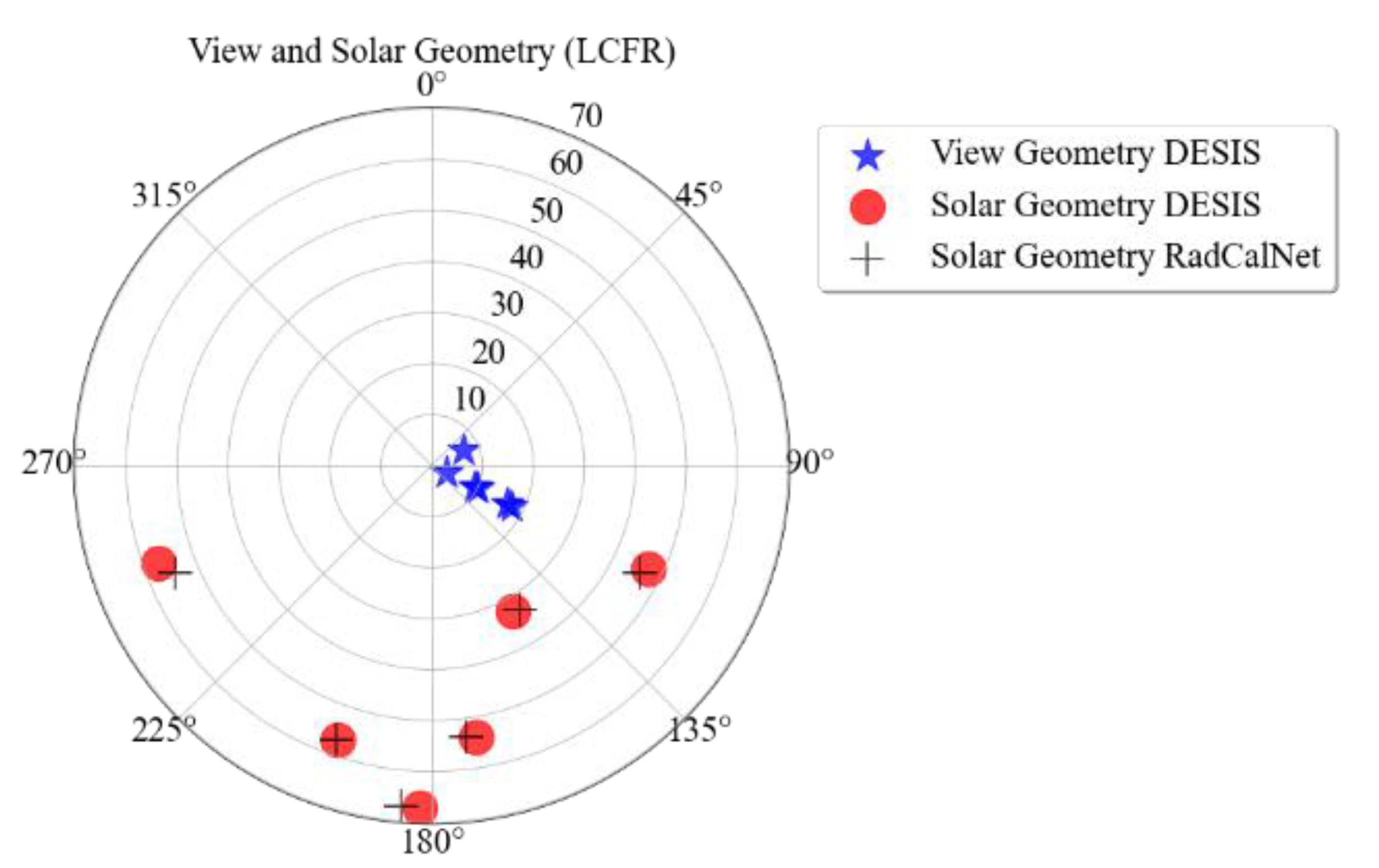
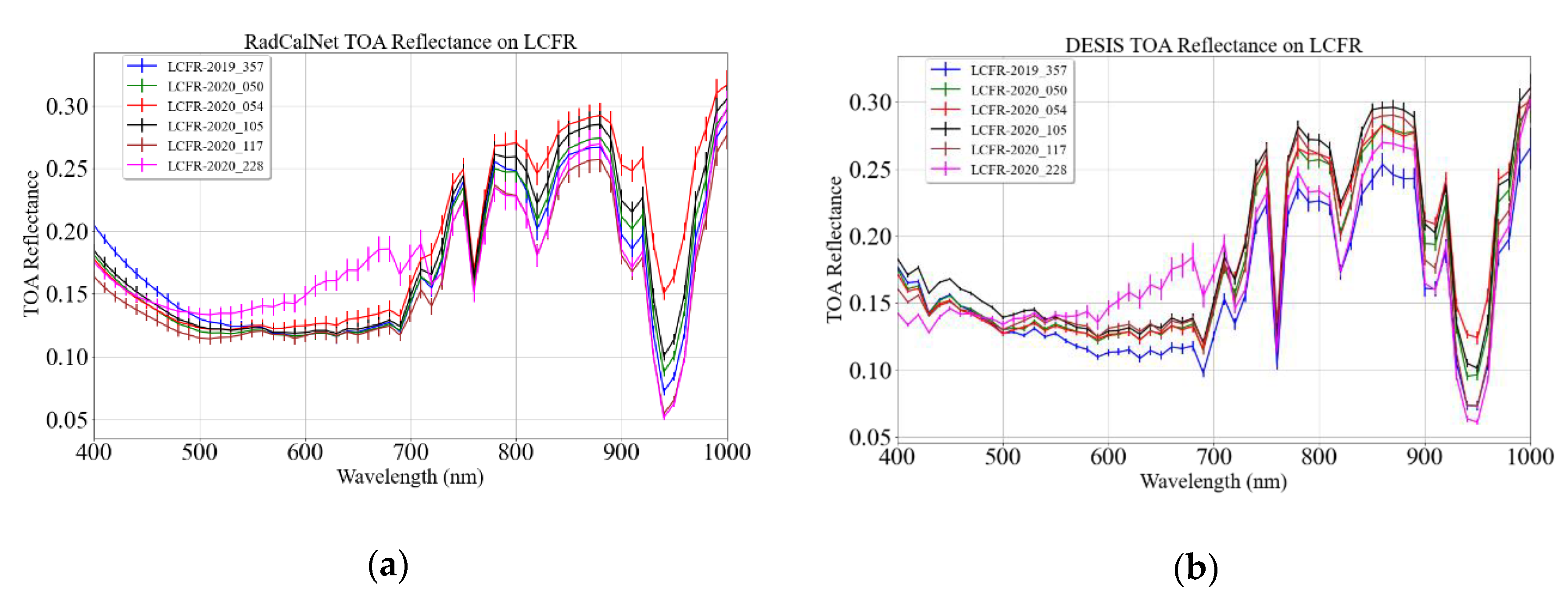
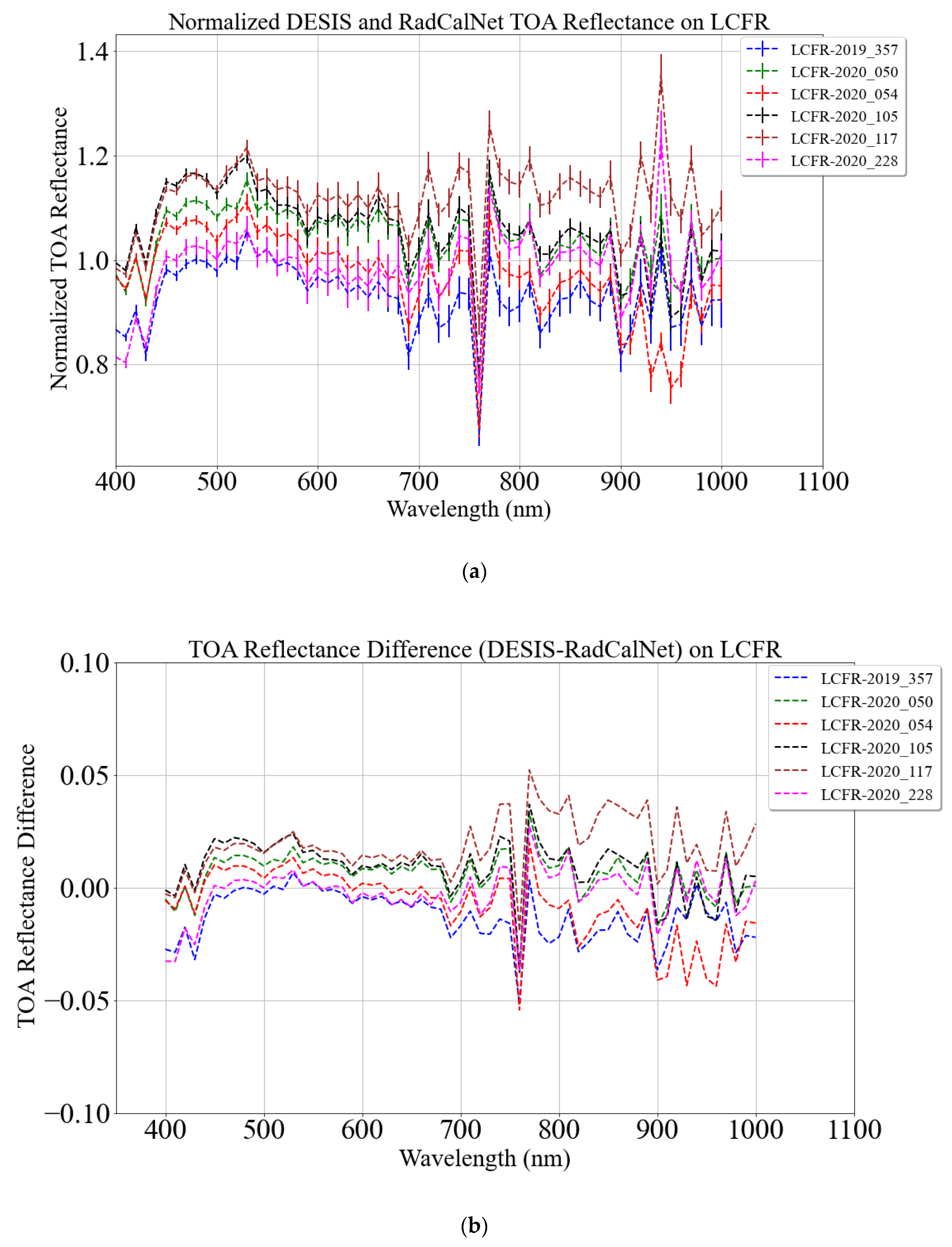
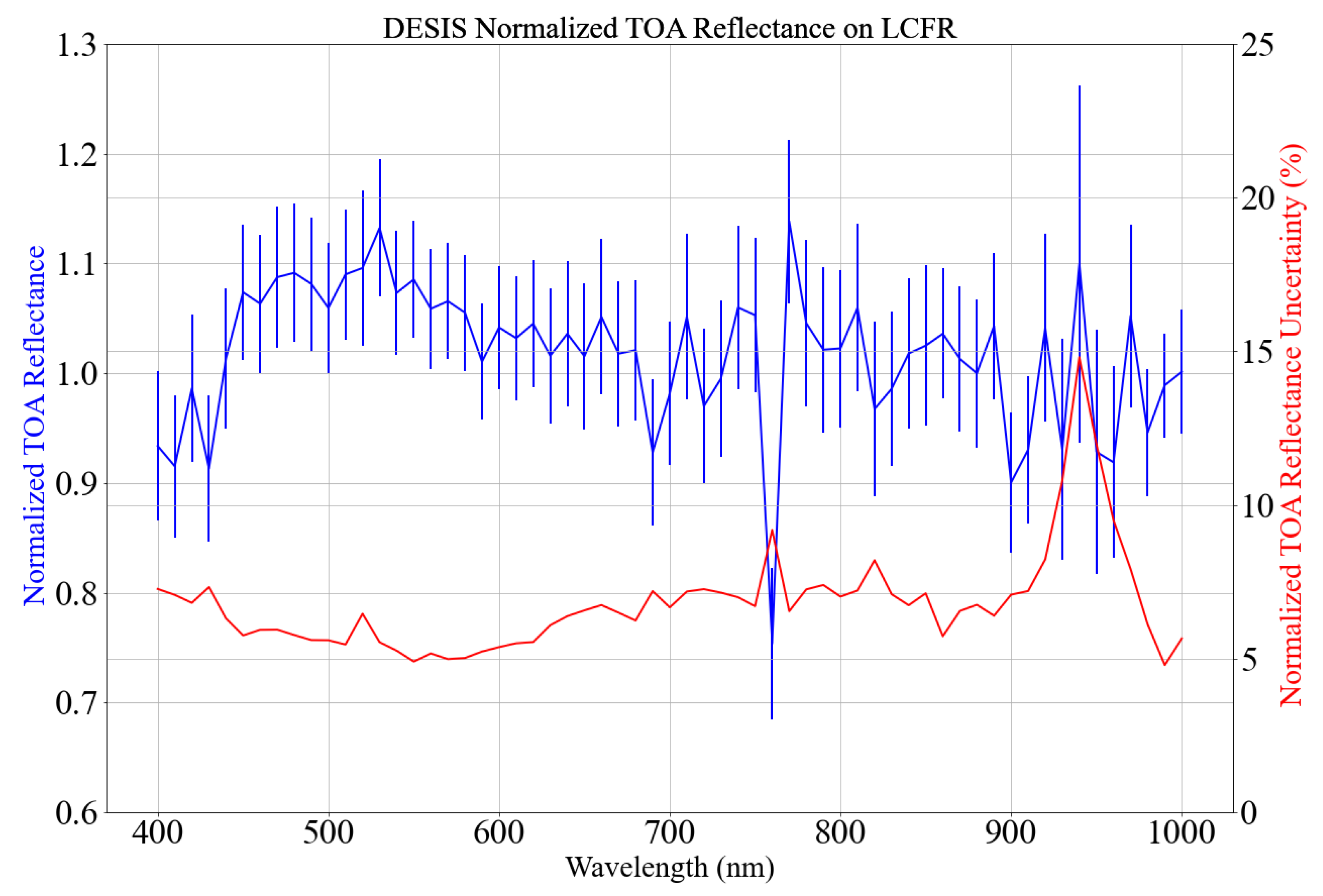
4.3. Comparison on LCFR
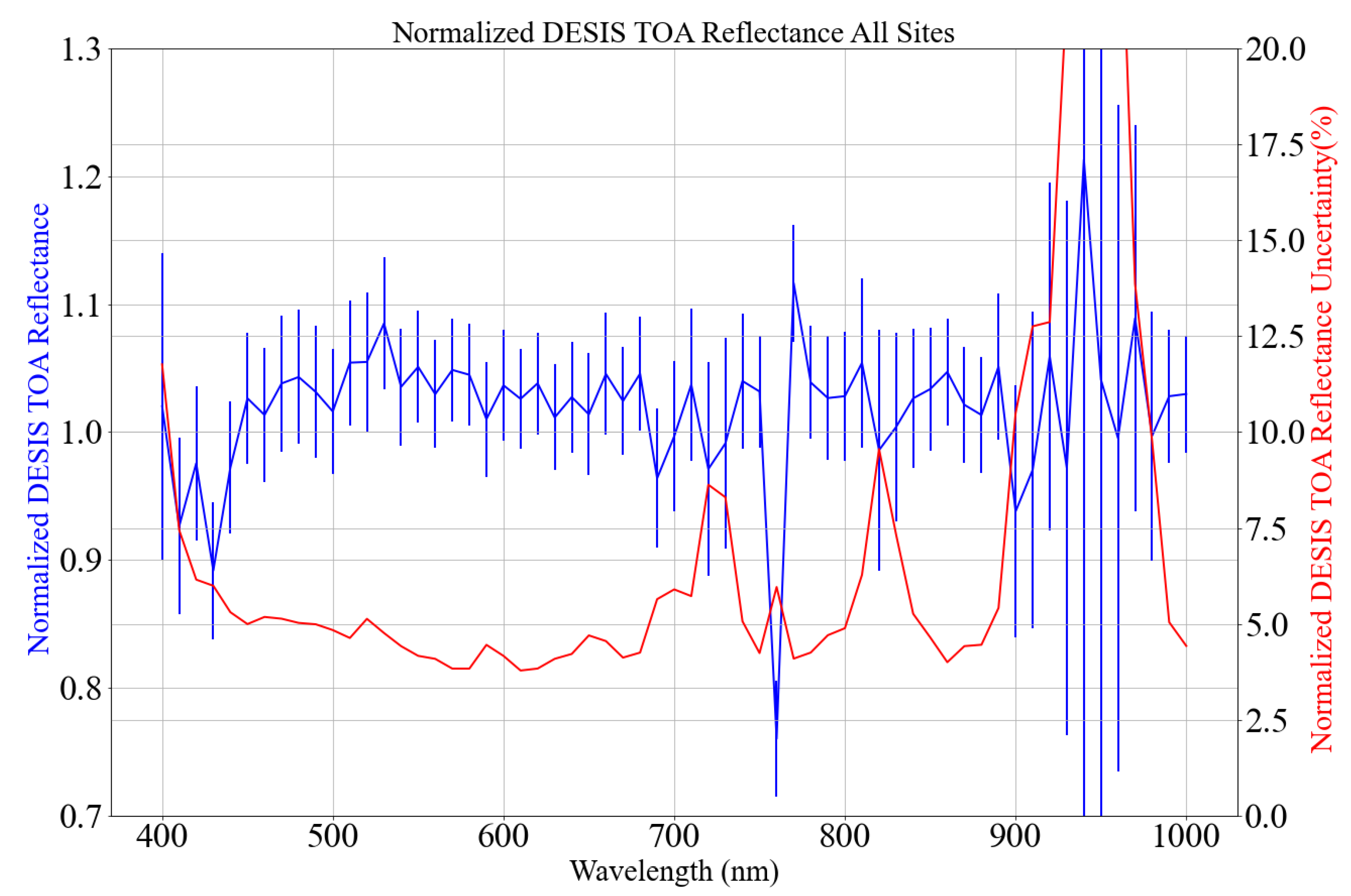
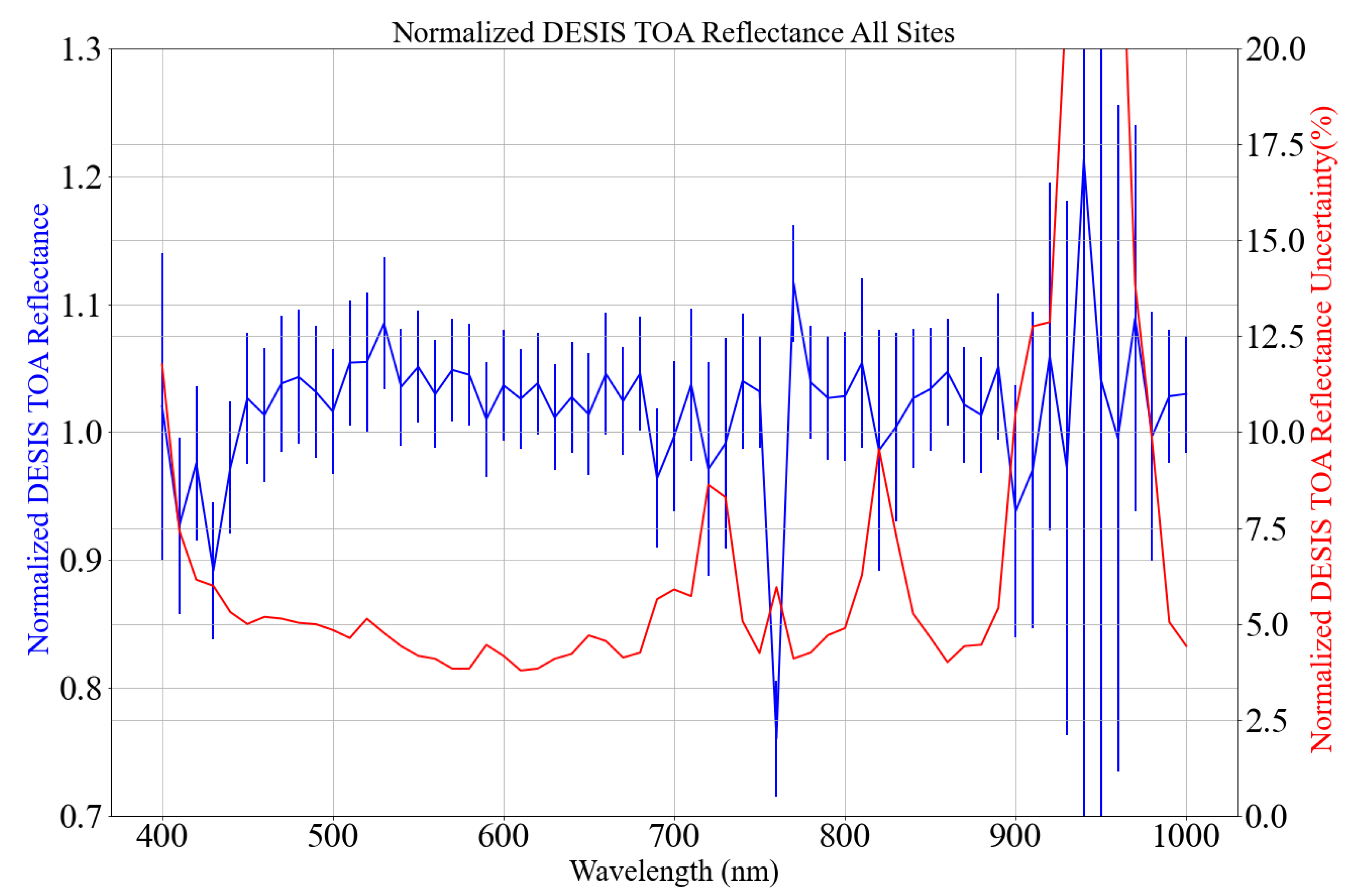
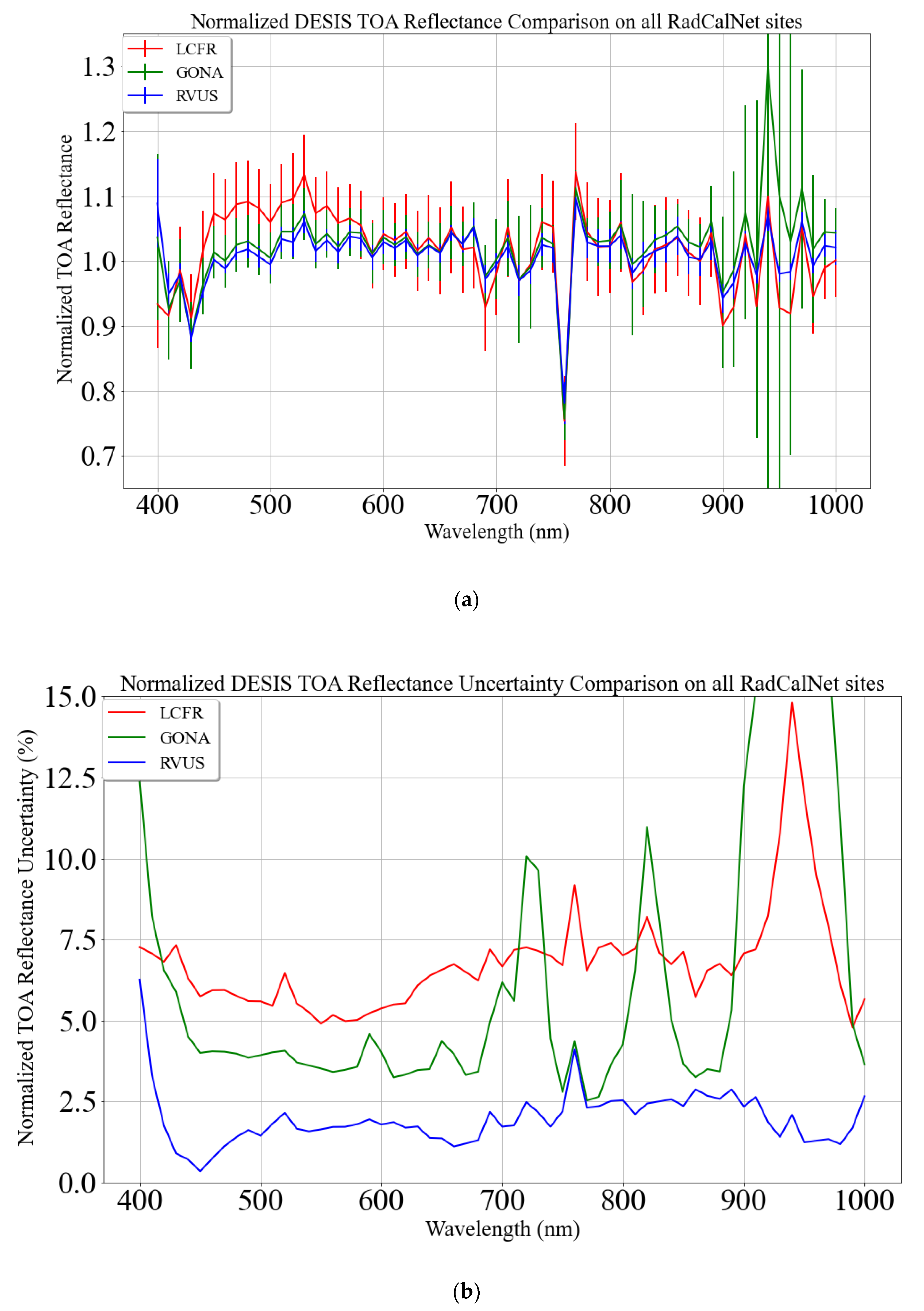
4.4. Comparison Using All Sites
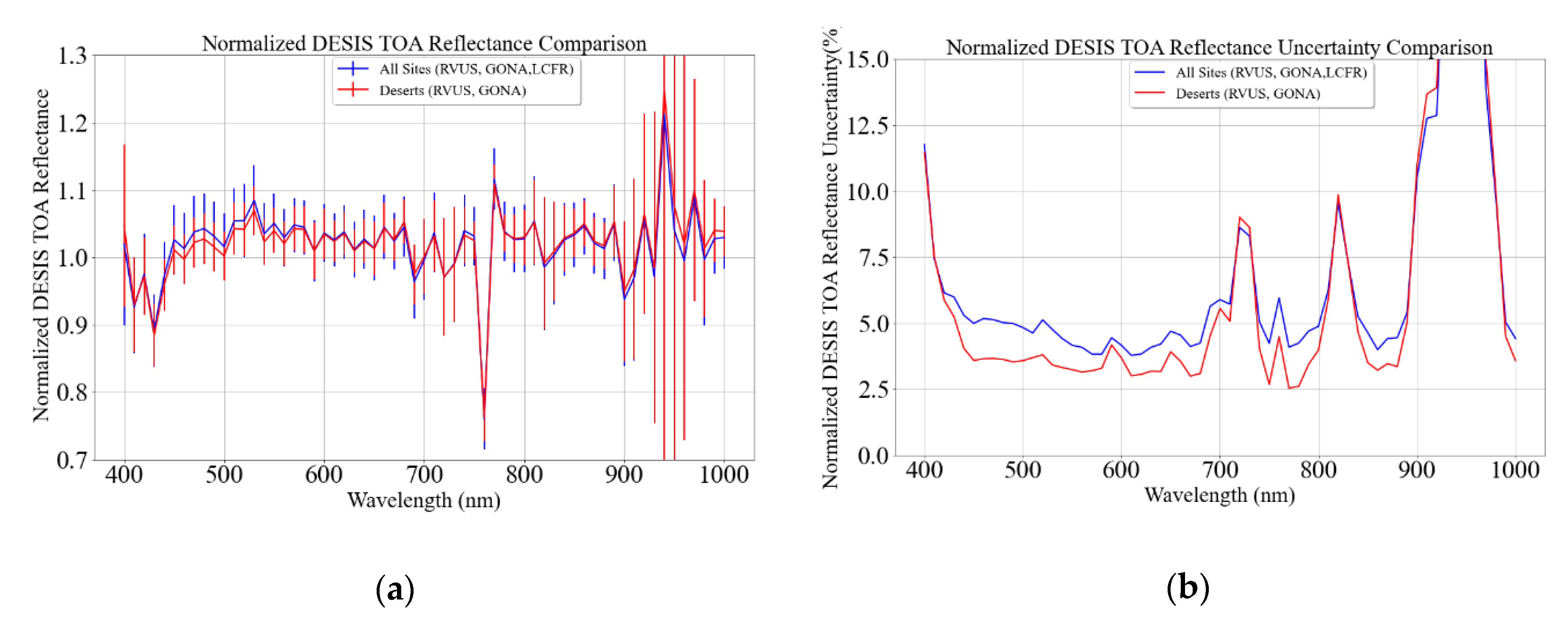
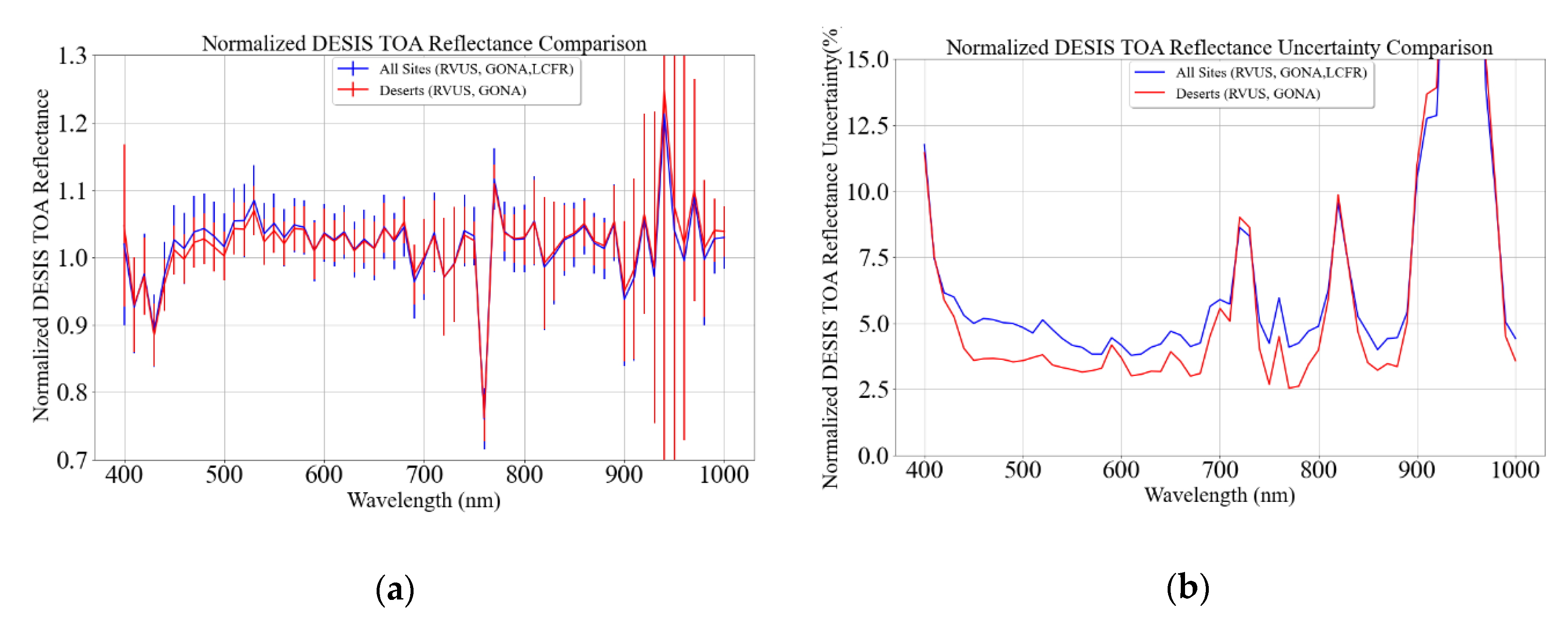
4.5. Comparison Using All Sites and Only Desert Sites
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Z.; Snyder, G.; Vadnais, C.; Arora, R.; Babcock, M.; Stensaas, G.; Doucette, P.; Newman, T. User needs for future Landsat missions. Remote Sens. Environ. 2019, 231, 111214. [Google Scholar] [CrossRef]
- Alonso, K.; Bachmann, M.; Burch, K.; Carmona, E.; Cerra, D.; de los Reyes, R.; Dietrich, D.; Heiden, U.; Hölderlin, A.; Ickes, J. Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors 2019, 19, 4471. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.-C.; Montes, M.J.; Davis, C.O.; Goetz, A.F. Atmospheric correction algorithms for hyperspectral remote sensing data of land and ocean. Remote Sens. Environ. 2009, 113, S17–S24. [Google Scholar] [CrossRef]
- Acosta, I.C.C.; Khodadadzadeh, M.; Tusa, L.; Ghamisi, P.; Gloaguen, R. A machine learning framework for drill-core mineral mapping using hyperspectral and high-resolution mineralogical data fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4829–4842. [Google Scholar] [CrossRef]
- McCorkel, J.; Thome, K.; Ong, L. Vicarious calibration of EO-1 Hyperion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 400–407. [Google Scholar] [CrossRef] [Green Version]
- Pignatti, S.; Palombo, A.; Pascucci, S.; Romano, F.; Santini, F.; Simoniello, T.; Umberto, A.; Vincenzo, C.; Acito, N.; Diani, M. The PRISMA hyperspectral mission: Science activities and opportunities for agriculture and land monitoring. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July2013; pp. 4558–4561. [Google Scholar]
- Iwasaki, A.; Ohgi, N.; Tanii, J.; Kawashima, T.; Inada, H. Hyperspectral Imager Suite (HISUI)-Japanese hyper-multi spectral radiometer. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1025–1028. [Google Scholar]
- Shea, Y. Pathfinder Mission for Climate Absolute Radiance and Refractivity Observatory (CLARREO) Pathfinder. Available online: https://clarreo-pathfinder.larc.nasa.gov/clarreo/ (accessed on 7 December 2020).
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.B.; Angal, A.; Choi, T.; Xiong, X.; Doelling, D.R. Applications of spectral band adjustment factors (SBAF) for cross-calibration. IEEE Trans. Geosci. Remote Sens. 2012, 51, 1267–1281. [Google Scholar] [CrossRef]
- Pinto, C.T.; Shrestha, M.; Hasan, N.; Leigh, L.; Helder, D. SBAF for cross-calibration of Landsat-8 OLI and Sentinel-2 MSI over North African PICS. In Proceedings of the Earth Observing Systems XXIII, Event: SPIE Optical Engineering + Applications, San Diego, CA, USA, 7 September 2018; p. 107640Y. [Google Scholar]
- Dinguirard, M.; Slater, P.N. Calibration of space-multispectral imaging sensors: A review. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Biggar, S.F.; Thome, K.J.; Wisniewski, W. Vicarious radiometric calibration of EO-1 sensors by reference to high-reflectance ground targets. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1174–1179. [Google Scholar] [CrossRef] [Green Version]
- Barsi, J.A.; Alhammoud, B.; Czapla-Myers, J.; Gascon, F.; Haque, M.O.; Kaewmanee, M.; Leigh, L.; Markham, B.L. Sentinel-2A MSI and Landsat-8 OLI radiometric cross comparison over desert sites. Eur. J. Remote Sens. 2018, 51, 822–837. [Google Scholar] [CrossRef]
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S. RadCalNet: A Radiometric Calibration Network for Earth Observing Imagers Operating in the Visible to Shortwave Infrared Spectral Range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef] [Green Version]
- Sebastian, I.; Krutz, D.; Eckardt, A.; Venus, H.; Walter, I.; Günther, B.; Neidhardt, M.; Reulke, R.; Müller, R.; Uhlig, M. On-ground calibration of DESIS: DLR’s Earth Sensing Imaging Spectrometer for the International Space Station (ISS). In Proceedings of the Optical Sensing and Detection V, Event: SPIE Photonics Europe, Strasbourg, France, 9 May 2018; p. 1068002. [Google Scholar]
- Krutz, D.; Müller, R.; Knodt, U.; Günther, B.; Walter, I.; Sebastian, I.; Säuberlich, T.; Reulke, R.; Carmona, E.; Eckardt, A. The instrument design of the DLR earth sensing imaging spectrometer (DESIS). Sensors 2019, 19, 1622. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thome, K.J.; Helder, D.L.; Aaron, D.; Dewald, J.D. Landsat-5 TM and Landsat-7 ETM+ absolute radiometric calibration using the reflectance-based method. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2777–2785. [Google Scholar] [CrossRef]
- Thome, K.; Nandy, P. Accuracy of ground-reference calibration of imaging spectroradiometers at large sensor view angles. J. Remote Sens. Soc. Jpn. 2000, 20, 602–614. [Google Scholar]
- Thome, K.; Cattrall, C.; D’Amico, J.; Geis, J. Ground-reference calibration results for Landsat-7 ETM+. In Proceedings of the Earth Observing Systems X, Event: Optics and Photonics, San Diego, CA, USA, 22 August 2005; p. 58820B. [Google Scholar]
- Czapla-Myers, J. RadCalNet Site Description. CEOS Reference: QA4EO-WGCV-IVO-CSP-002_RVUS; University of Arizona: Tucson, AZ, USA, 2018. [Google Scholar]
- Santer, R.; Gu, X.; Guyot, G.; Deuze, J.; Devaux, C.; Vermote, E.; Verbrugghe, M. SPOT calibration at the La Crau test site (France). Remote Sens. Environ. 1992, 41, 227–237. [Google Scholar] [CrossRef]
- Meygret, A. RadCalNet Site Description.CEOS Reference: QA4EO-WGCV-IVO-CSP-002_LCFR; CNES, Physics for Optical Mesurement Service: Belin, France, 2018. [Google Scholar]
- Meygret, A.; Santer, R.P.; Berthelot, B. ROSAS: A robotic station for atmosphere and surface characterization dedicated to on-orbit calibration. In Proceedings of the Earth Observing Systems XVI, Event: SPIE Optical Engineering + Applications, San Diego, CA, USA, 13 September 2011; p. 815311. [Google Scholar]
- Ma, L. RadCalNet Site Description.CEOS Reference: QA4EO-WGCV-RadCalNet-BSCN-Q-v1; Academy of Opto-Electronics, Chinese Academy of Science: Beijing, China, 2018. [Google Scholar]
- Ma, L.; Zhao, Y.; Woolliams, E.R.; Dai, C.; Wang, N.; Liu, Y.; Li, L.; Wang, X.; Gao, C.; Li, C. Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples. Remote Sens. 2020, 12, 1696. [Google Scholar] [CrossRef]
- Li, C.; Ma, L.; Gao, C.; Tang, L.; Wang, N.; Liu, Y.; Zhao, Y.; Dou, S.; Zhang, D.; Li, X. Permanent target for optical payload performance and data quality assessment: Spectral characterization and a case study for calibration. J. Appl. Remote Sens. 2015, 8, 083498. [Google Scholar] [CrossRef]
- Greenwell, C. RadCalNet Site Description. CEOS Reference: QA4EO-WGCV-IVO-CSP-002_GONA; National Physical Laboratory: Hampton Raod, UK, 2018. [Google Scholar]
- Thome, K. Sampling and uncertainty issues in trending reflectance-based vicarious calibration results. In Proceedings of the Earth Observing Systems X, Event: Optics and Photonics, San Diego, CA, USA, 22 August 2005; p. 588216. [Google Scholar]
- Jing, X.; Leigh, L.; Teixeira Pinto, C.; Helder, D. Evaluation of RadCalNet Output Data Using Landsat 7, Landsat 8, Sentinel 2A, and Sentinel 2B Sensors. Remote Sens. 2019, 11, 541. [Google Scholar] [CrossRef] [Green Version]
- Pratlong, J.; Burt, D.; Jerram, P.; Mayer, F.; Walker, A.; Simpson, R.; Johnson, S.; Hubbard, W. CMOS sensors for atmospheric imaging. In Proceedings of the International Conference on Space Optics—ICSO 2016, Biarritz, France, 18–21 October 2016; p. 105622N. [Google Scholar]
- Shrestha, M.; Christopherson, J. Cross Comparison of DESIS with Landsat 8 OLI and Sentinel 2A MSI. In Proceedings of the Calcon, Space Dynamics Laboratory, Logan, UT, USA, 24 September 2020. [Google Scholar]
- Teixeira Pinto, C.; Jing, X.; Leigh, L. Evaluation Analysis of Landsat Level-1 and Level-2 Data Products Using In Situ Measurements. Remote Sens. 2020, 12, 2597. [Google Scholar] [CrossRef]
- Sterckx, S.; Wolters, E. Radiometric Top-of-Atmosphere Reflectance Consistency Assessment for Landsat 8/OLI, Sentinel-2/MSI, PROBA-V, and DEIMOS-1 over Libya-4 and RadCalNet Calibration Sites. Remote Sens. 2019, 11, 2253. [Google Scholar] [CrossRef] [Green Version]
- Aparajithan, S. USGS System Characterization Results and Plans. In Proceedings of the 19th JACIE Virtual Conference, USGS EROS, Sioux Falls, SD, USA, 18 November 2020. [Google Scholar]
- Czapla-Myers, J.S.; Coburn, C.A.; Thome, K.J.; Wenny, B.N.; Anderson, N.J. Directional reflectance studies in support of the Radiometric Calibration Test Site (RadCaTS) at Railroad Valley. In Proceedings of the Earth Observing Systems XXIII, Event: SPIE Optical Engineering + Applications, San Diego, CA, USA, 7 September 2018; p. 107640Z. [Google Scholar]
- Bruegge, C.J.; Coburn, C.; Elmes, A.; Helmlinger, M.C.; Kataoka, F.; Kuester, M.; Kuze, A.; Ochoa, T.; Schaaf, C.; Shiomi, K. Bi-Directional Reflectance Factor Determination of the Railroad Valley Playa. Remote Sens. 2019, 11, 2601. [Google Scholar] [CrossRef] [Green Version]
- Shrestha, M. Bidirectional Distribution Reflectance Function of Algodones Dunes. Master’s Thesis, South Dakota State University, Brookings, SD, USA, 2016. Available online: https://openprairie.sdstate.edu/etd/1141/ (accessed on 25 April 2021).
- Shrestha, M.; Hasan, N.; Leigh, L.; Helder, D. Derivation of Hyperspectral Profile of Extended Pseudo Invariant Calibration Sites (EPICS) for Use in Sensor Calibration. Remote Sens. 2019, 11, 2279. [Google Scholar] [CrossRef] [Green Version]
- Shrestha, M.; Leigh, L.; Helder, D. Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors. Remote Sens. 2019, 11, 875. [Google Scholar] [CrossRef] [Green Version]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Pearlman, J.; Carman, S.; Segal, C.; Jarecke, P.; Clancy, P.; Browne, W. Overview of the Hyperion imaging spectrometer for the NASA EO-1 mission. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; pp. 3036–3038. [Google Scholar]
- Loveland, T.R.; Dwyer, J.L. Landsat: Building a strong future. Remote Sens. Environ. 2012, 122, 22–29. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Goldin, D.; Xiong, X.; Shea, Y.; Lukashin, C. CLARREO Pathfinder/VIIRS Intercalibration: Quantifying the Polarization Effects on Reflectance and the Intercalibration Uncertainty. Remote Sens. 2019, 11, 1914. [Google Scholar] [CrossRef] [Green Version]
- Transon, J.; d’Andrimont, R.; Maugnard, A.; Defourny, P. Survey of hyperspectral earth observation applications from space in the sentinel-2 context. Remote Sens. 2018, 10, 157. [Google Scholar] [CrossRef] [Green Version]
- Rast, M.; Painter, T.H. Earth Observation imaging spectroscopy for terrestrial systems: An overview of its history, techniques, and applications of its missions. Surv. Geophys. 2019, 40, 303–331. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Field of View (FOV) | 4.1° |
| Instantaneous Field of View (IFOV) | 0.004° |
| Ground Sample Distance (GSD) | 30 m |
| Swath | 30 km |
| Spectral Sampling | 2.55 nm |
| Signal to Noise Ratio (SNR) | 195 (no binning) 386 (binning 4) |
| Number of spectral channels Binning Modes | 235 1,2,3,4 |
| Radiometric Resolution | 12 bits + 1-bit gain |
| Full Width Half Max (FWHM) | <3 nm |
| Orbit | 51.6° inclination |
| Altitude | 400 nm |
| Coverage | 52° North to 52° South |
| Revisit Frequency | 3 to 5 days (mean) |
| RVUS | GONA | LCFR | BSCN |
|---|---|---|---|
| 2018.11.03 | 2019.02.04 | 2019.03.05 | 2019.06.04 |
| 2018.12.10 | 2019.03.08 | 2019.06.24 | 2019.10.20 |
| 2018.12.13 | 2019.06.29 | 2019.07.30 | 2019.10.28 |
| 2019.02.28 | 2019.07.10 | 2019.08.14 | |
| 2019.03.07 | 2019.07.23 | 2019.09.04 | |
| 2019.06.21 | 2019.08.03 | 2019.12.23 | |
| 2019.06.28 | 2019.09.11 | 2020.02.19 | |
| 2019.08.04 | 2019.10.02 | 2020.02.23 | |
| 2019.08.19 | 2019.10.26 | 2020.04.14 | |
| 2019.08.22 | 2019.11.03 | 2020.04.26 | |
| 2019.09.06 | 2019.11.20 | 2020.06.20 | |
| 2019.10.21 | 2020.03.13 | 2020.08.15 | |
| 2019.10.25 | 2020.03.27 | ||
| 2019.10.29 | 2020.03.31 | ||
| 2020.01.29 | 2020.04.04 | ||
| 2020.02.14 | 2020.05.29 | ||
| 2020.02.21 | 2020.06.27 | ||
| 2020.03.04 | |||
| 2020.04.01 | |||
| 2020.06.11 | |||
| 2020.06.14 | |||
| 2020.09.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shrestha, M.; Helder, D.; Christopherson, J. DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements. Remote Sens. 2021, 13, 2420. https://doi.org/10.3390/rs13122420
Shrestha M, Helder D, Christopherson J. DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements. Remote Sensing. 2021; 13(12):2420. https://doi.org/10.3390/rs13122420
Chicago/Turabian StyleShrestha, Mahesh, Dennis Helder, and Jon Christopherson. 2021. "DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements" Remote Sensing 13, no. 12: 2420. https://doi.org/10.3390/rs13122420
APA StyleShrestha, M., Helder, D., & Christopherson, J. (2021). DLR Earth Sensing Imaging Spectrometer (DESIS) Level 1 Product Evaluation Using RadCalNet Measurements. Remote Sensing, 13(12), 2420. https://doi.org/10.3390/rs13122420