
A V-SLAM Guided and Portable System for Photogrammetric Applications




Abstract

1. Introduction
1.1. Brief Introduction to Visual SLAM
1.2. Paper Contributions
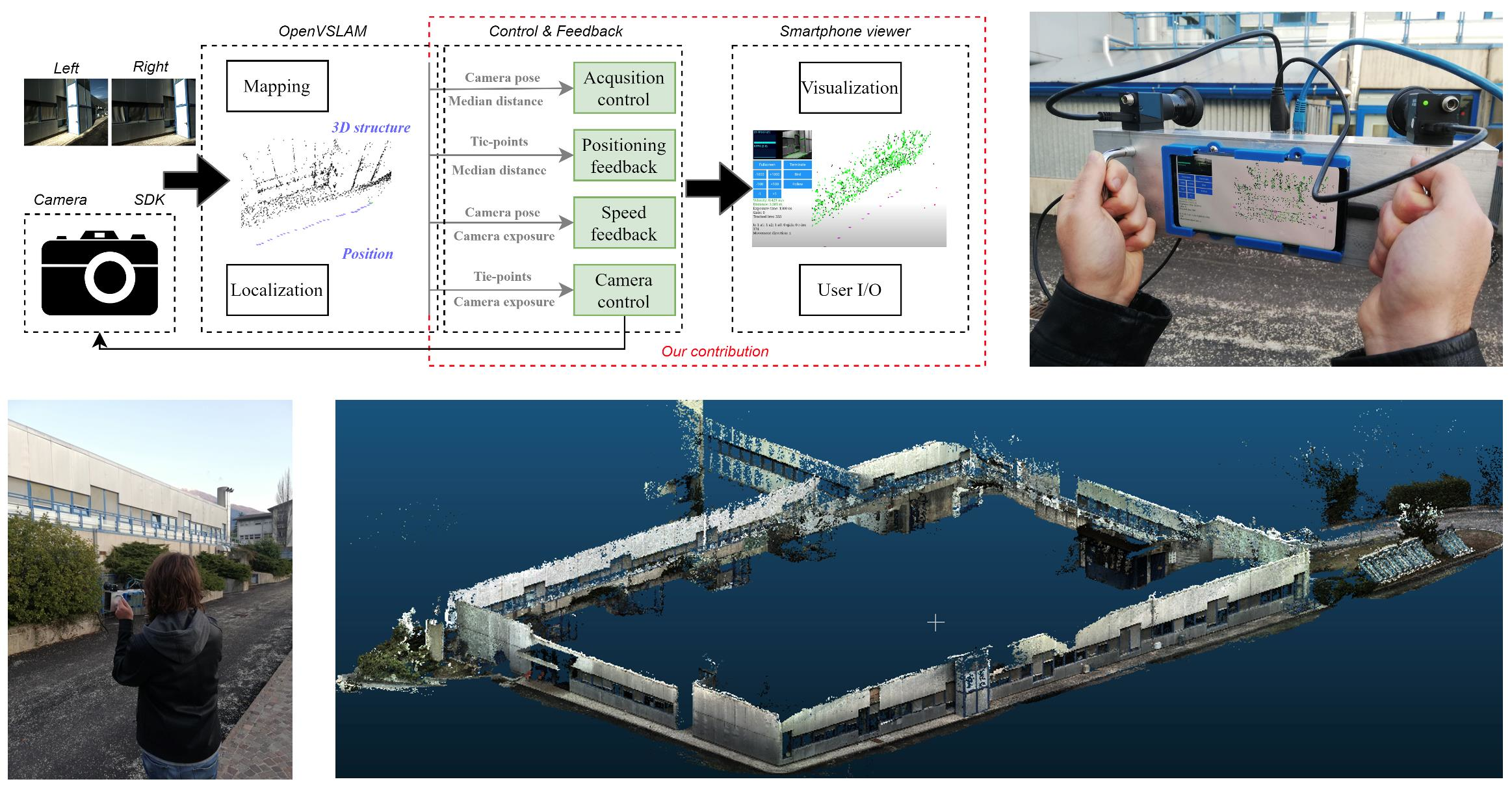
- Realization of a flexible, low-cost and highly portable V-SLAM-based stereo vision prototype—named GuPho (Guided Photogrammetric System)—that integrates an image acquisition system with a real-time guidance system (distance from the target object, speed, overlap, automatic exposure). To the best of our knowledge, this is the first example of a portable system for photogrammetric applications with a real-time guidance control that does not use coded targets or any other external positioning system (e.g., GNSS, motion capture).
- Modular system design based on power efficient ARM architecture: data computation and data visualization are split among two different systems (Raspberry and smartphone) and they can exploit the full computational resources available on each device.
- An algorithm for assisted and optimized image acquisition following photogrammetric principles, with real-time positioning and speed feedback (Section 2.3.1, Section 2.3.3 and Section 2.3.3).
- A method for automatic camera exposure control guided by the locations and depths of the stereo matched tie-points, which is robust in challenging lighting situations and prioritizes the surveyed object over background image regions (Section 2.3.4).
- Experiments and validation on large-scale scenarios with long trajectory (more than 300 m) and accuracy analyses in 3D space by means of laser scanning ground truth data (Section 3).
2. Proposed Prototype
2.1. Hardware
2.2. Software
2.3. Guidance System
- Acquisition control.
- Positioning feedback.
- Speed feedback.
- Camera control.
2.3.1. Acquisition Control
2.3.2. Positioning Feedback
2.3.3. Speed Feedback
2.3.4. Camera Control for Exposure Correction
3. Experiments
3.1. Camera Syncronization and Calibration
3.2. Positioning and Speed Feedback Test
3.3. Camera Control Test
3.4. Accuracy Test
- Directly using the camera poses estimated by our system, without further refining.
- Re-estimating the camera poses with photogrammetric software, fixing the stereo baseline between corresponding pairs to impose the scale.
4. Discussion
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Riveiro, B.; Lindenbergh, R. (Eds.) Laser Scanning: An Emerging Technology in Structural Engineering, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar] [CrossRef]
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Review of mobile mapping and surveying technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Toschi, I.; Rodríguez-Gonzálvez, P.; Remondino, F.; Minto, S.; Orlandini, S.; Fuller, A. Accuracy evaluation of a mobile mapping system with advanced statistical methods. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 245. [Google Scholar] [CrossRef]
- Nocerino, E.; Rodríguez-Gonzálvez, P.; Menna, F. Introduction to mobile mapping with portable systems. In Laser Scanning; CRC Press: Boca Raton, FL, USA, 2019; pp. 37–52. [Google Scholar]
- Hassan, T.; Ellum, C.; Nassar, S.; Wang, C.; El-Sheimy, N. Photogrammetry for Mobile Mapping. GPS World 2007, 18, 44–48. [Google Scholar]
- Burkhard, J.; Cavegn, S.; Barmettler, A.; Nebiker, S. Stereovision mobile mapping: System design and performance evaluation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 5, 453–458. [Google Scholar] [CrossRef]
- Holdener, D.; Nebiker, S.; Blaser, S. Design and Implementation of a Novel Portable 360 Stereo Camera System with Low-Cost Action Cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 105. [Google Scholar] [CrossRef]
- Blaser, S.; Nebiker, S.; Cavegn, S. System design, calibration and performance analysis of a novel 360 stereo panoramic mobile mapping system. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 207. [Google Scholar] [CrossRef]
- Ortiz-Coder, P.; Sánchez-Ríos, A. An Integrated Solution for 3D Heritage Modeling Based on Videogrammetry and V-SLAM Technology. Remote Sens. 2020, 12, 1529. [Google Scholar] [CrossRef]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Visintini, D.; Vettore, A. Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Appl. Sci. 2018, 8, 416. [Google Scholar] [CrossRef]
- Al-Hamad, A.; Elsheimy, N. Smartphones Based Mobile Mapping Systems. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 29–34. [Google Scholar] [CrossRef]
- Nocerino, E.; Poiesi, F.; Locher, A.; Tefera, Y.T.; Remondino, F.; Chippendale, P.; Van Gool, L. 3D Reconstruction with a Collaborative Approach Based on Smartphones and a Cloud-Based Server. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 187–194. [Google Scholar] [CrossRef]
- Fraser, C.S. Network design considerations for non-topographic photogrammetry. Photogramm. Eng. Remote Sens. 1984, 50, 1115–1126. [Google Scholar]
- Nocerino, E.; Menna, F.; Remondino, F.; Saleri, R. Accuracy and block deformation analysis in automatic UAV and terrestrial photogrammetry-Lesson learnt. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, W1. [Google Scholar] [CrossRef]
- Nocerino, E.; Menna, F.; Remondino, F. Accuracy of typical photogrammetric networks in cultural heritage 3D modeling projects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 45, 465–472. [Google Scholar] [CrossRef]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A Critical Review of Automated Photogrammetricprocessing of Large Datasets. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 591–599. [Google Scholar] [CrossRef]
- Sieberth, T.; Wackrow, R.; Chandler, J.H. Motion blur disturbs—The influence of motion-blurred images in photogrammetry. Photogramm. Rec. 2014, 29, 434–453. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Ballabeni, A.; Apollonio, F.I.; Gaiani, M.; Remondino, F. Advances in Image Pre-processing to Improve Automated 3D Reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 8, 178. [Google Scholar] [CrossRef]
- Lecca, M.; Torresani, A.; Remondino, F. Comprehensive evaluation of image enhancement for unsupervised image description and matching. IET Image Process. 2020, 14, 4329–4339. [Google Scholar] [CrossRef]
- Kedzierski, M.; Wierzbicki, D. Radiometric quality assessment of images acquired by UAV’s in various lighting and weather conditions. Measurement 2015, 76, 156–169. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns. Photogramm. Fernerkund. Geoinf. PFG 2016, 1, 17–30. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed]
- Nex, F.; Duarte, D.; Steenbeek, A.; Kerle, N. Towards real-time building damage mapping with low-cost UAV solutions. Remote Sens. 2019, 11, 287. [Google Scholar] [CrossRef]
- Sahinoglu, Z. Ultra-Wideband Positioning Systems; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Shim, I.; Lee, J.-Y.; Kweon, I.S. Auto-adjusting camera exposure for outdoor robotics using gradient information. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1011–1017. [Google Scholar] [CrossRef]
- Zhang, Z.; Forster, C.; Scaramuzza, D. Active exposure control for robust visual odometry in HDR environments. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3894–3901. [Google Scholar] [CrossRef]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Younes, G.; Asmar, D.; Shammas, E.; Zelek, J. Keyframe-based monocular SLAM: Design, survey, and future directions. Robot. Auton. Syst. 2017, 98, 67–88. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Towards the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Sualeh, M.; Kim, G.-W. Simultaneous Localization and Mapping in the Epoch of Semantics: A Survey. Int. J. Control Autom. Syst. 2019, 17, 729–742. [Google Scholar] [CrossRef]
- Chen, S.; Li, Y.; Kwok, N.M. Active vision in robotic systems: A survey of recent developments. Int. J. Robot. Res. 2011, 30, 1343–1377. [Google Scholar] [CrossRef]
- Sünderhauf, N.; Brock, O.; Scheirer, W.; Hadsell, R.; Fox, D.; Leitner, J.; Upcroft, B.; Abbeel, P.; Burgard, W.; Milford, M.; et al. The Limits and Potentials of Deep Learning for Robotics. Int. J. Robot. Res. 2018, 37, 405–420. [Google Scholar] [CrossRef]
- Karam, S.; Vosselman, G.; Peter, M.; Hosseinyalamdary, S.; Lehtola, V. Design, Calibration, and Evaluation of a Backpack Indoor Mobile Mapping System. Remote Sens. 2019, 11, 905. [Google Scholar] [CrossRef]
- Lauterbach, H.A.; Borrmann, D.; Heß, R.; Eck, D.; Schilling, K.; Nüchter, A. Evaluation of a Backpack-Mounted 3D Mobile Scanning System. Remote Sens. 2015, 7, 13753–13781. [Google Scholar] [CrossRef]
- Kalisperakis, I.; Mandilaras, T.; El Saer, A.; Stamatopoulou, P.; Stentoumis, C.; Bourou, S.; Grammatikopoulos, L. A Modular Mobile Mapping Platform for Complex Indoor and Outdoor Environments. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 243–250. [Google Scholar] [CrossRef]
- Davison, A.J.; Reid, I.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Klein, G.; Murray, D. Parallel Tracking and Mapping on a camera phone. In Proceedings of the 2009 8th IEEE International Symposium on Mixed and Augmented Reality, Orlando, FL, USA, 19–22 October 2009; pp. 83–86. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar] [CrossRef]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-Scale Direct Monocular SLAM. In Computer Vision—ECCV 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; Volume 8690, pp. 834–849. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Sumikura, S.; Shibuya, M.; Sakurada, K. OpenVSLAM: A Versatile Visual SLAM Framework. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; ACM Press: New York, NY, USA; pp. 2292–2295. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM. ArXiv200711898 Cs. Available online: http://arxiv.org/abs/2007.11898 (accessed on 12 March 2021).
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. In ACM Siggraph 2006 Papers; ACM Press: New York, NY, USA, 2006; pp. 835–846. [Google Scholar]
- Schonberger, J.L.; Frahm, J.-M. Structure-from-motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Trajković, M.; Hedley, M. Fast corner detection. Image Vis. Comput. 1998, 16, 75–87. [Google Scholar] [CrossRef]
- Calonder, M.; Lepetit, V.; Ozuysal, M.; Trzcinski, T.; Strecha, C.; Fua, P. BRIEF: Computing a Local Binary Descriptor Very Fast. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1281–1298. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcellona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Kummerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2O: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar] [CrossRef]
- Galvez-López, D.; Tardos, J.D. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Torresani, A.; Remondino, F. Videogrammetry vs Photogrammetry for heritage 3D reconstruction. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W15, 1157–1162. Available online: http://hdl.handle.net/11582/319626 (accessed on 1 June 2021).
- Perfetti, L.; Polari, C.; Fassi, F.; Troisi, S.; Baiocchi, V.; del Pizzo, S.; Giannone, F.; Barazzetti, L.; Previtali, M.; Roncoroni, F. Fisheye Photogrammetry to Survey Narrow Spaces in Architecture and a Hypogea Environment. In Latest Developments in Reality-Based 3D Surveying Model; MDPI: Basel, Switzeralnd, 2018; pp. 3–28. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging; Walter de Gruyter: Berlin, Germany, 2013. [Google Scholar]
- Tong, H.; Li, M.; Zhang, H.; Zhang, C. Blur detection for digital images using wavelet transform. In Proceedings of the 2004 IEEE International Conference on Multimedia and Expo (ICME) (IEEE Cat. No.04TH8763); IEEE: Toulouse, France, 2004; Volume 1, pp. 17–20. [Google Scholar] [CrossRef]
- Ji, H.; Liu, C. Motion blur identification from image gradients. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Pertuz, S.; Puig, D.; Garcia, M.A. Analysis of focus measure operators for shape-from-focus. Pattern Recognit. 2013, 46, 1415–1432. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2012, 60, 84–90. [Google Scholar] [CrossRef]
- Hinton, G.; Vinyals, O.; Dean, J. Distilling the Knowledge in a Neural Network. arXiv 2015, arXiv:1503.02531. [Google Scholar]
- Nourani-Vatani, N.; Roberts, J. Automatic camera exposure control. In Proceedings of the Australasian Conference on Robotics and Automation 2007; Dunbabin, M., Srinivasan, M., Eds.; Australian Robotics and Automation Association Inc.: Sydney, Australia, 2007; pp. 1–6. [Google Scholar]
- Menna, F.; Nocerino, E. Optical aberrations in underwater photogrammetry with flat and hemispherical dome ports. In Videometrics, Range Imaging, and Applications XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10332, p. 1033205. [Google Scholar] [CrossRef]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. In Eurographics Italian Chapter Conference; CNR: Pisa, Italy, 2008; pp. 129–136. [Google Scholar]
- Nocerino, E.; Menna, F.; Remondino, F.; Toschi, I.; Rodríguez-Gonzálvez, P. Investigation of indoor and outdoor performance of two portable mobile mapping systems. SPIE Proc. In Proceedings of the Videometrics, Range Imaging, and Applications XIV, Munich, Germany, 26 June 2017; Volume 10332. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MMS | FORM. | SENSING DEVICE | SYST. ARCH. | R.G.S. | DOM. |
|---|---|---|---|---|---|
| Holdener et al. [7] | H | Cameras (multi-view) | ARM | No | R |
| Ortiz-Coder et al. [9] | H | Camera | X86/X64 | Partial | R |
| Nocerino et al. [12] | S | Camera | ARM | No | R |
| Karam et al. [34] | B | Laser | X86/X64 | - | R |
| Lauterbach et al. [35] | B | Laser | X86/X64 | - | R |
| Kalisperakis et al. [36] | T | Laser-cameras (multi-view) | ARM | - | R |
| Vexcel Ultracam Panther | B | Laser-cameras (multi-view) | X86/X64 | - | C |
| GeoSLAM Horizon | H | Laser-camera | X86/X64 | - | C |
| Leica Pegasus:backpack | B | Laser-cameras (multi-view) | X86/X64 | - | C |
| Kaarta Stencil 2 | H | Laser-camera | X86/X64 | - | C |
| Ours | H | Cameras (stereo) | ARM | Yes | R |
| First Calibration with Focus 1m—Small Test Field | |||||||
| (mm) | (mm) | (deg) | (deg) | (deg) | (deg) | (deg) | (deg) |
| 245.3167 | 0.1099 | −0.0935 | 0.0394 | −22.1123 | 0.0121 | −0.0239 | 0.0341 |
| Second Calibration with Focus at Hyperfocal—Large Test Field | |||||||
| (mm) | (mm) | (deg) | (deg) | (deg) | (deg) | (deg) | (deg) |
| 244.9946 | 0.2388 | −0.0941 | 0.0136 | −22.4721 | 0.0079 | −0.01199 | 0.0055 |
| Pair | Laser Data [m] | Dense (SLAM-Based) Cloud [m] | LME [m] | RLME [%] |
|---|---|---|---|---|
| 1 | 4.7766 | 4.7508 | 0.0258 | −0.5401 |
| 2 | 2.3843 | 2.3701 | 0.0142 | −0.5956 |
| 3 | 3.5795 | 3.5854 | 0.0059 | 0.1648 |
| 4 | 0.4948 | 0.4901 | 0.0047 | −0.9498 |
| 5 | 2.3888 | 2.3433 | 0.0455 | −1.9047 |
| 6 | 2.3730 | 2.3840 | 0.011 | 0.4635 |
| 7 | 4.7647 | 4.7838 | 0.0191 | 0.4009 |
| Median | 0.0142 | −0.5401 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torresani, A.; Menna, F.; Battisti, R.; Remondino, F. A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sens. 2021, 13, 2351. https://doi.org/10.3390/rs13122351
Torresani A, Menna F, Battisti R, Remondino F. A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sensing. 2021; 13(12):2351. https://doi.org/10.3390/rs13122351
Chicago/Turabian StyleTorresani, Alessandro, Fabio Menna, Roberto Battisti, and Fabio Remondino. 2021. "A V-SLAM Guided and Portable System for Photogrammetric Applications" Remote Sensing 13, no. 12: 2351. https://doi.org/10.3390/rs13122351
APA StyleTorresani, A., Menna, F., Battisti, R., & Remondino, F. (2021). A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sensing, 13(12), 2351. https://doi.org/10.3390/rs13122351