
Outdoor Mobile Mapping and AI-Based 3D Object Detection with Low-Cost RGB-D Cameras: The Use Case of On-Street Parking Statistics



Abstract
:
1. Introduction
- A mobile mapping payload based on the Robot Operating System (ROS) with a low-cost global navigation satellite system/inertial measurement unit (GNSS/IMU) positioning unit and two low-cost Intel RealSense D455 3D cameras
- Integration of the above on an electric tricycle as a versatile mobile mapping research platform (capable of carrying multiple sensor payloads)
- A performance evaluation of different low-cost 3D cameras under real-world outdoor conditions
- A neural network-based approach for 3D vehicle detection and localization from RGB-D imagery yielding position, dimension, and orientation of the detected vehicles
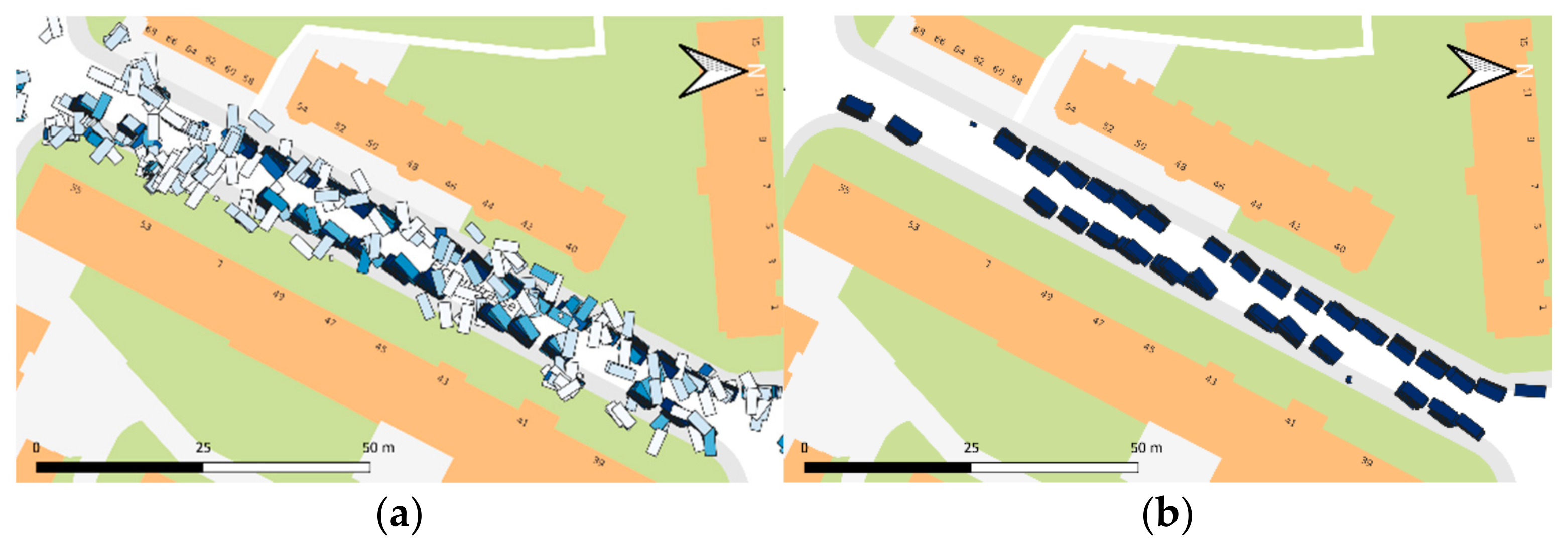
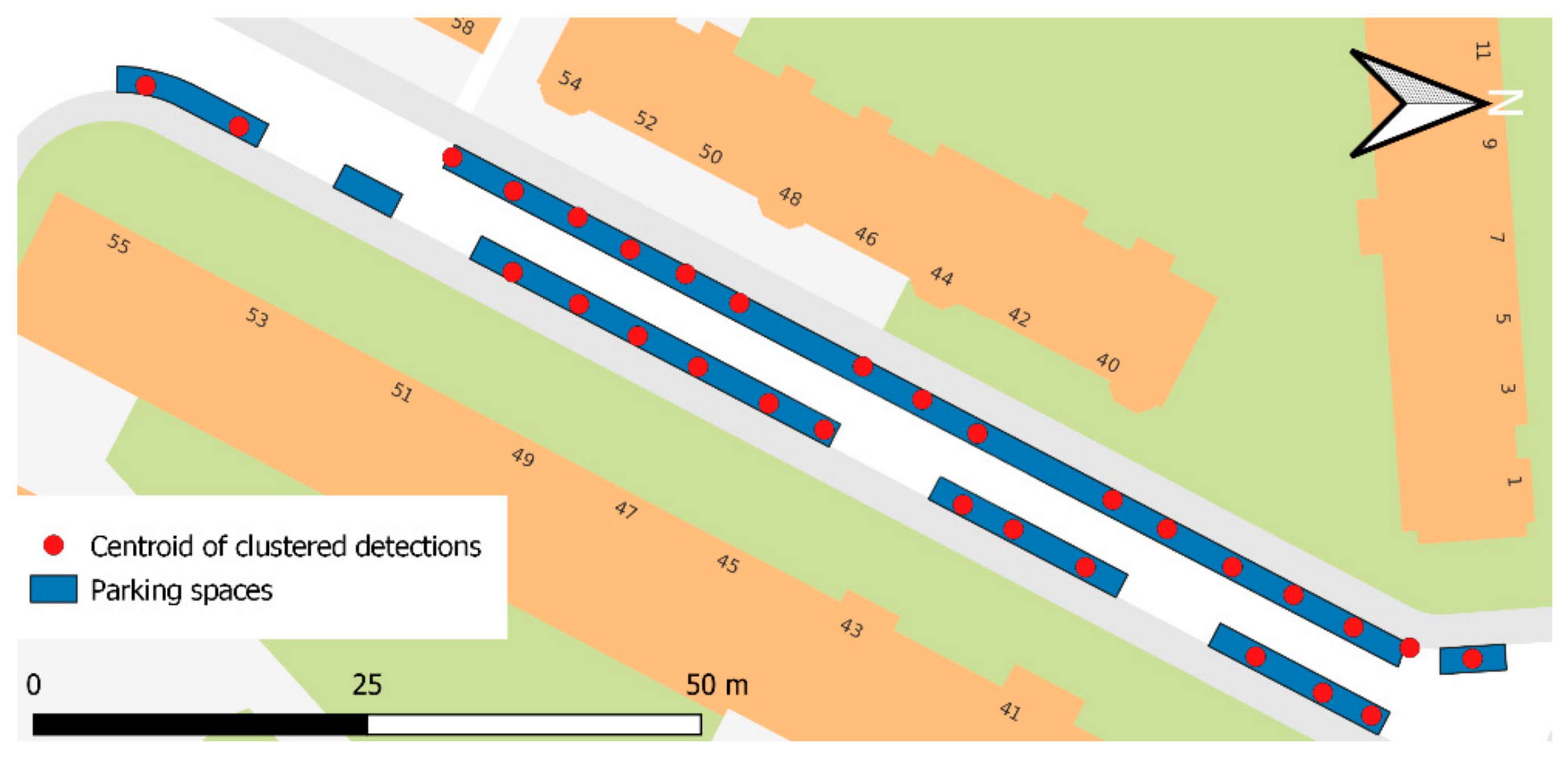
- A GIS-based approach for clustering of vehicle detections and to increase the robustness of the detections
- Test campaigns to evaluate the performance and limitations of our method.
2. Related Work
2.1. Smart Parking and On-Street Parking Statistics
2.2. Low-Cost 3D Sensors and Applications
2.2.1. RGB-D Cameras in Mapping Applications
2.2.2. Performance Evaluation of RGB-D Cameras
2.3. Vehicle Detection
2.3.1. Monocular
2.3.2. Point Cloud
2.3.3. Fusion
3. Materials and Methods
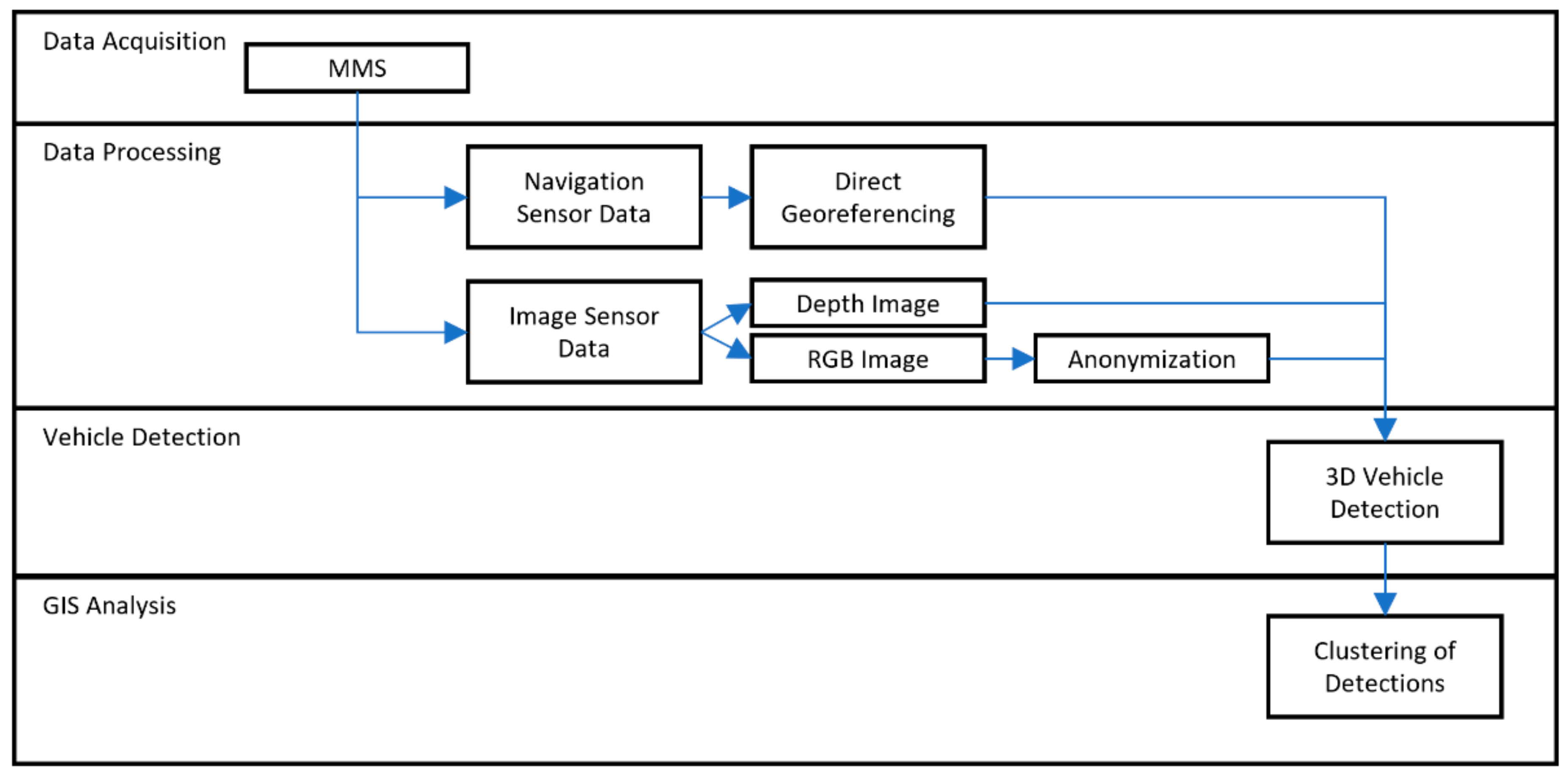
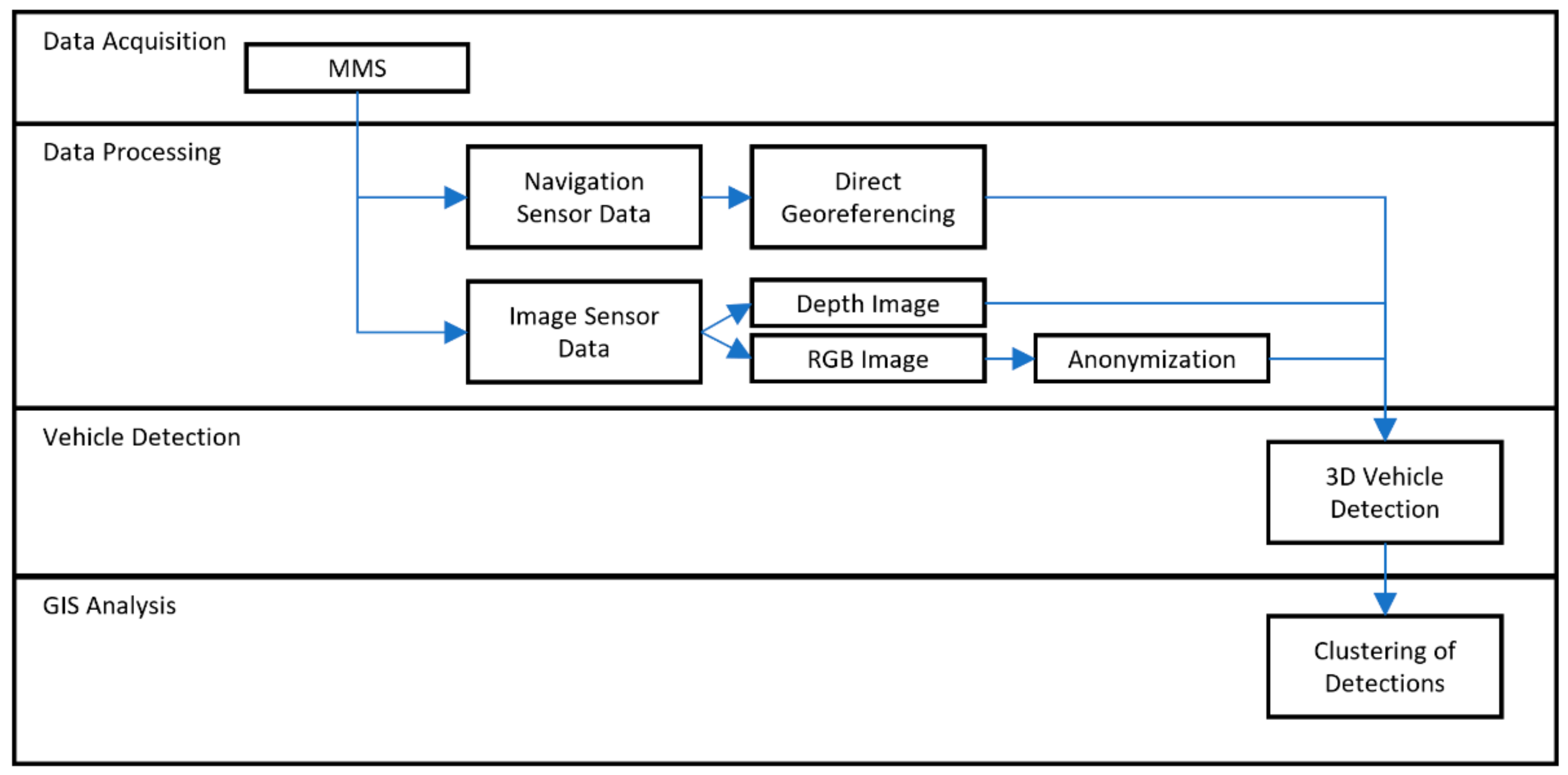
3.1. Overview of System and Workflow
3.2. Data Capturing System
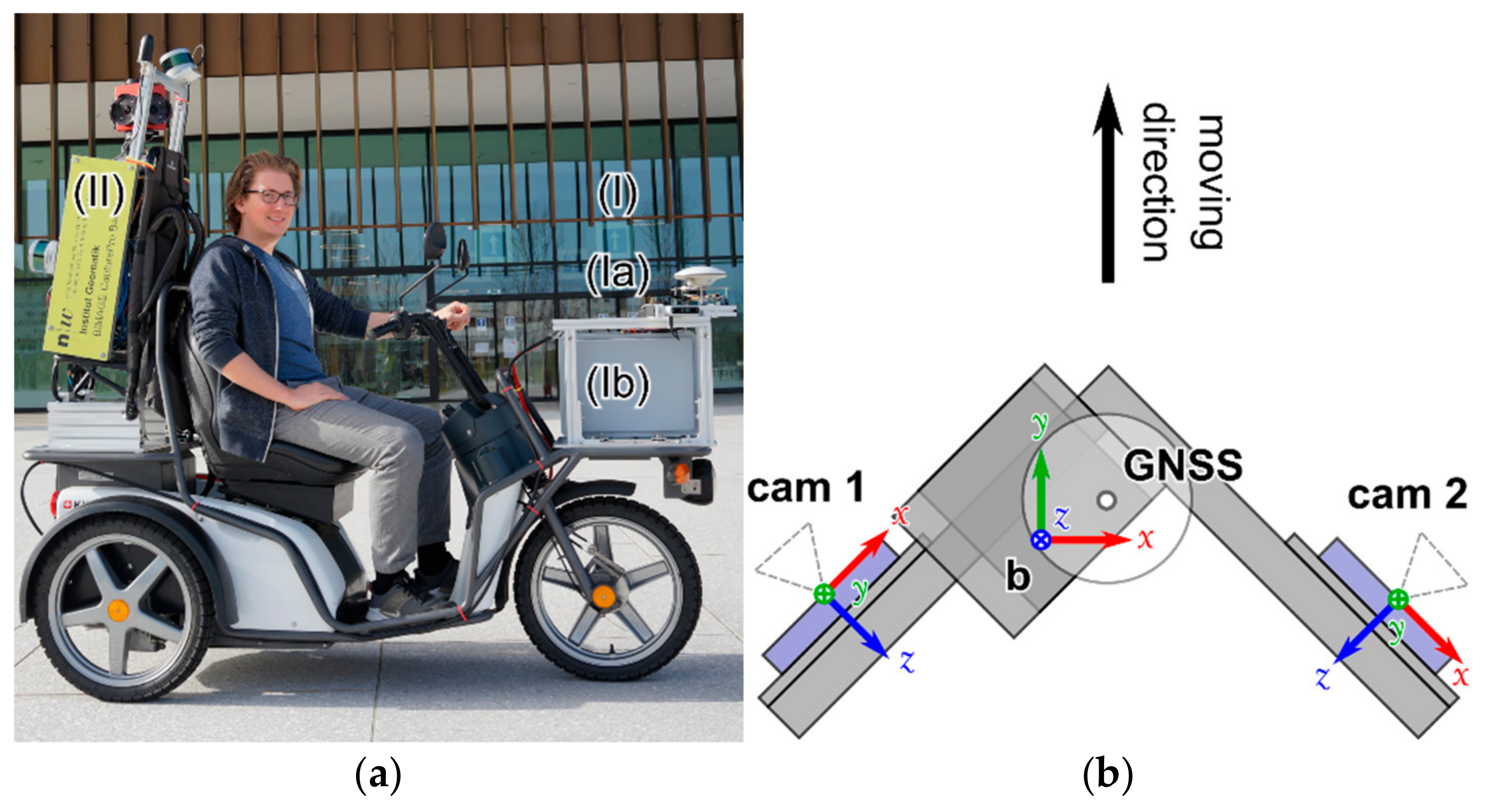
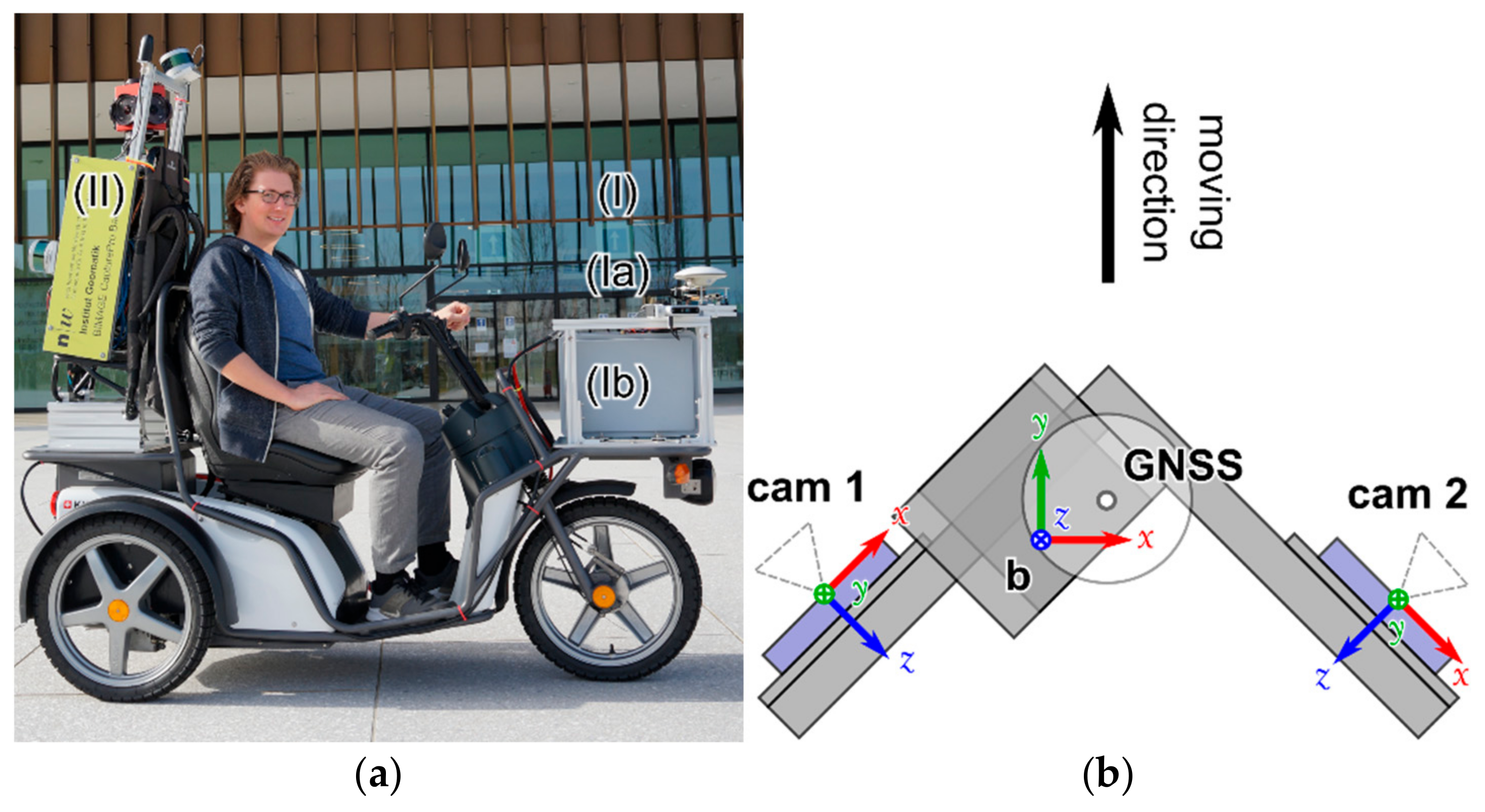
3.2.1. System Components
3.2.2. System Configuration
3.2.3. System Software
3.2.4. Data Acquisition and Georeferencing
3.3. Data Pre-Processing
3.3.1. Data Anonymization
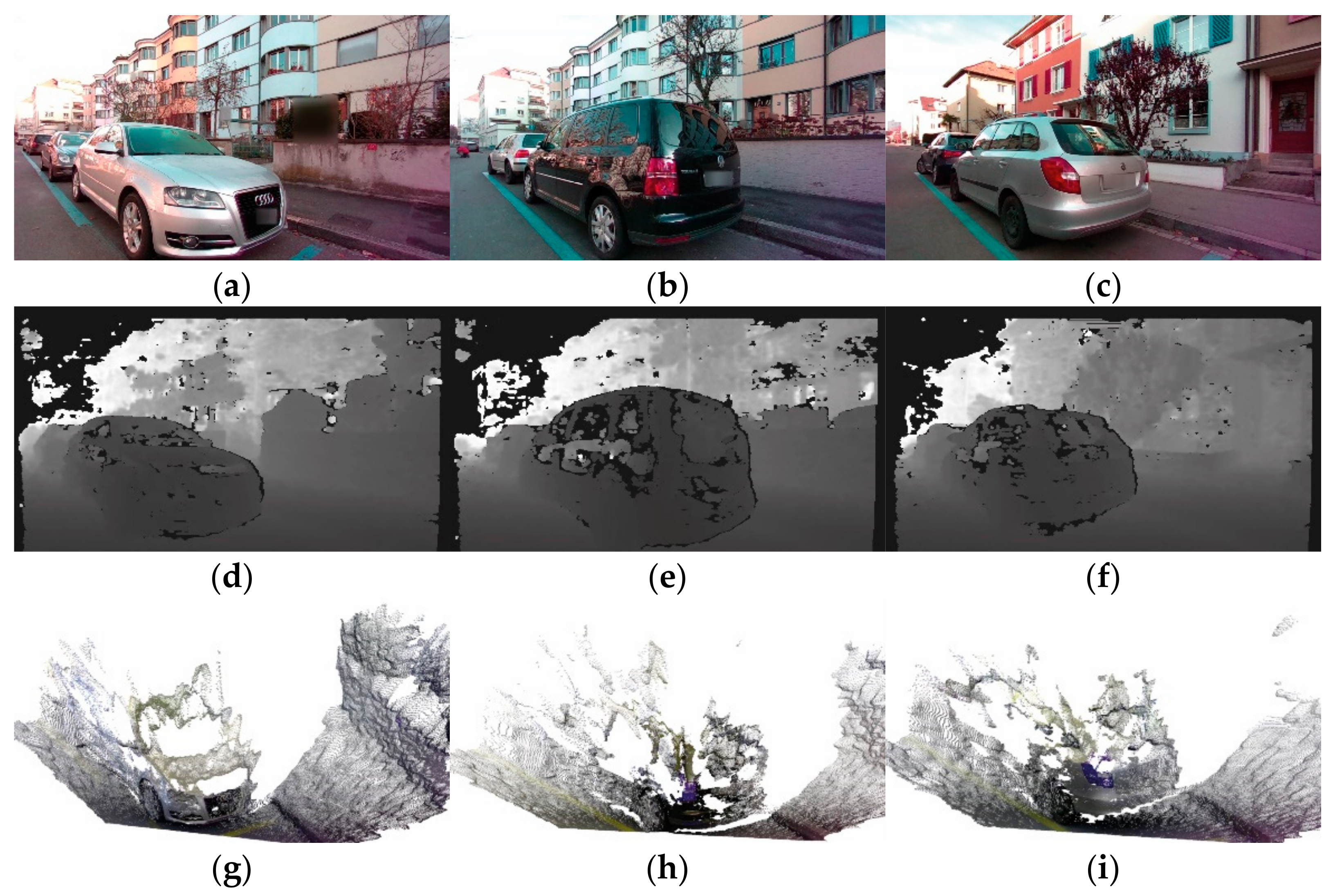
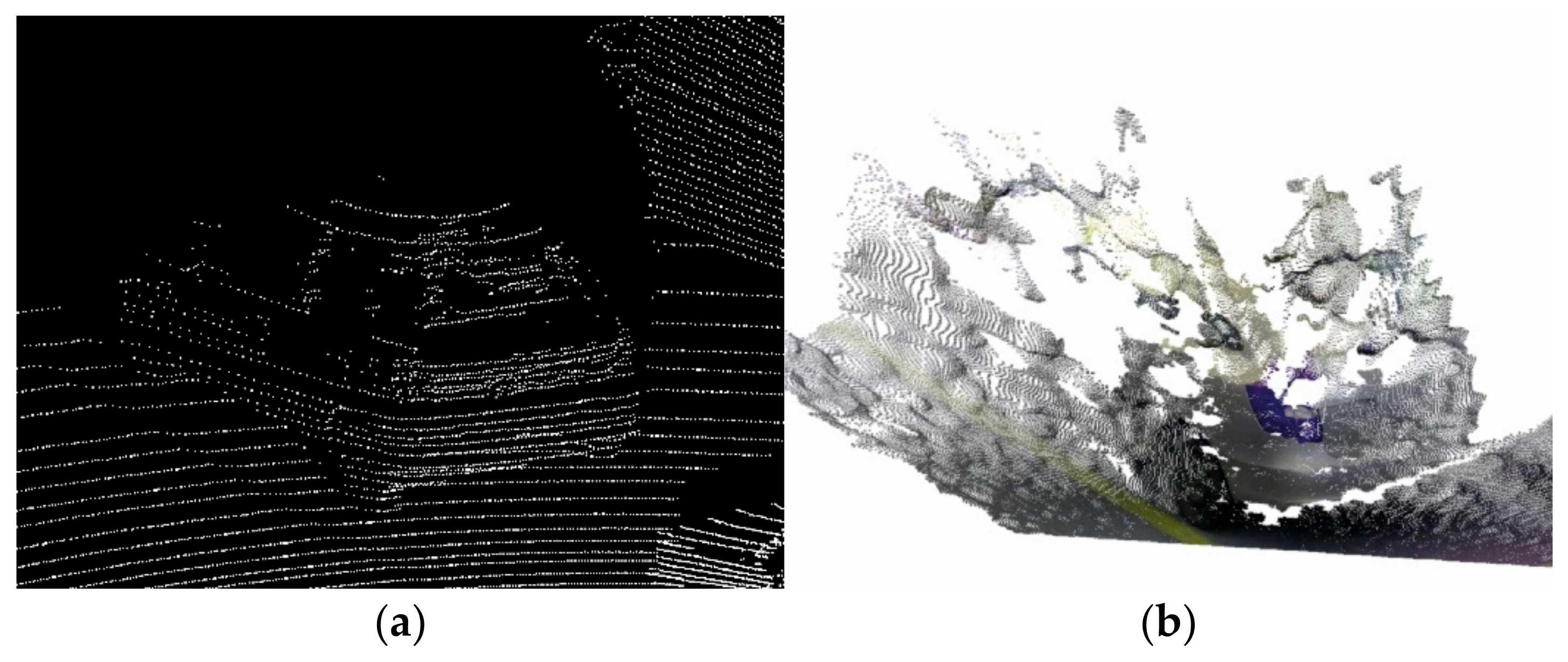
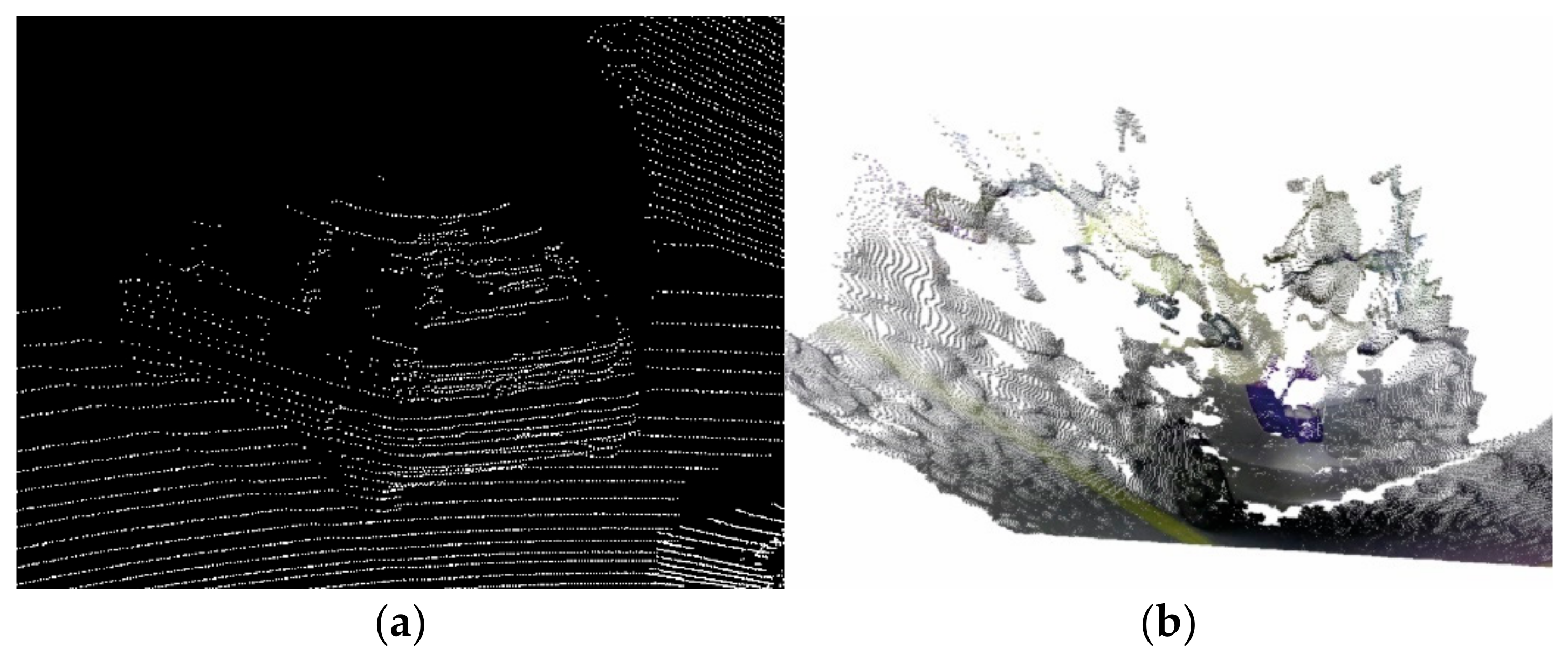
3.3.2. Conversion of Depth Maps to Point Clouds
3.4. 3D Vehicle Detection and Mapping
3.4.1. AI-Based 3D Detection
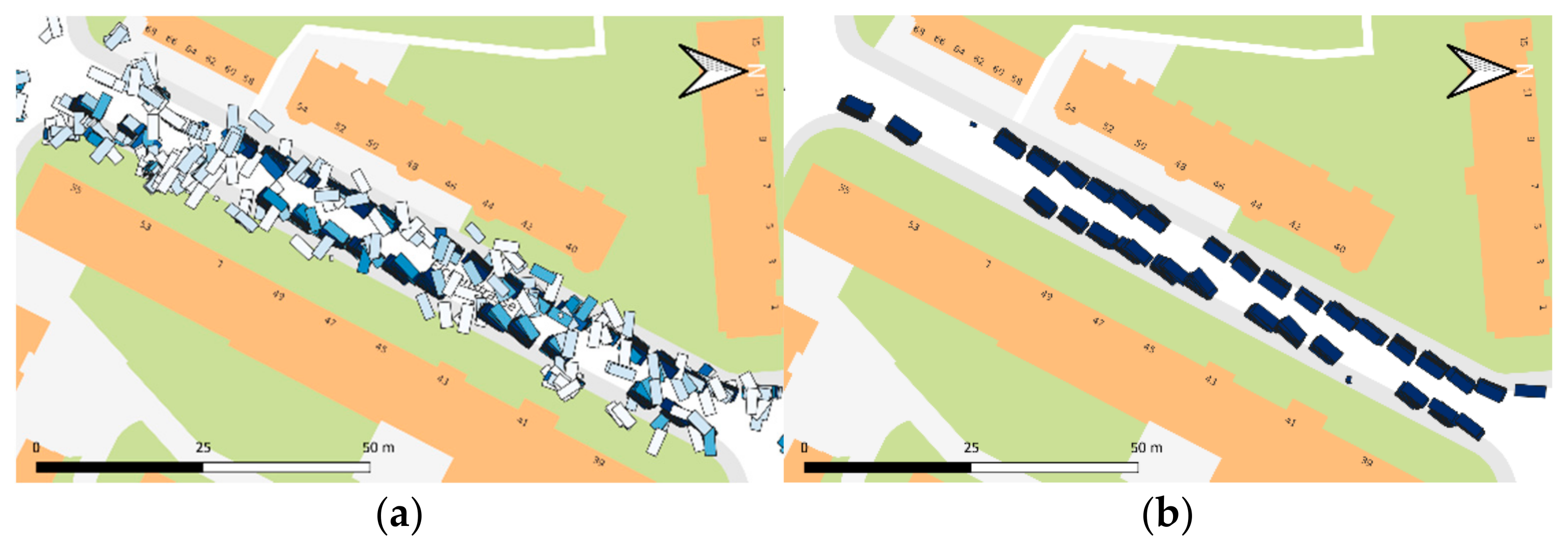
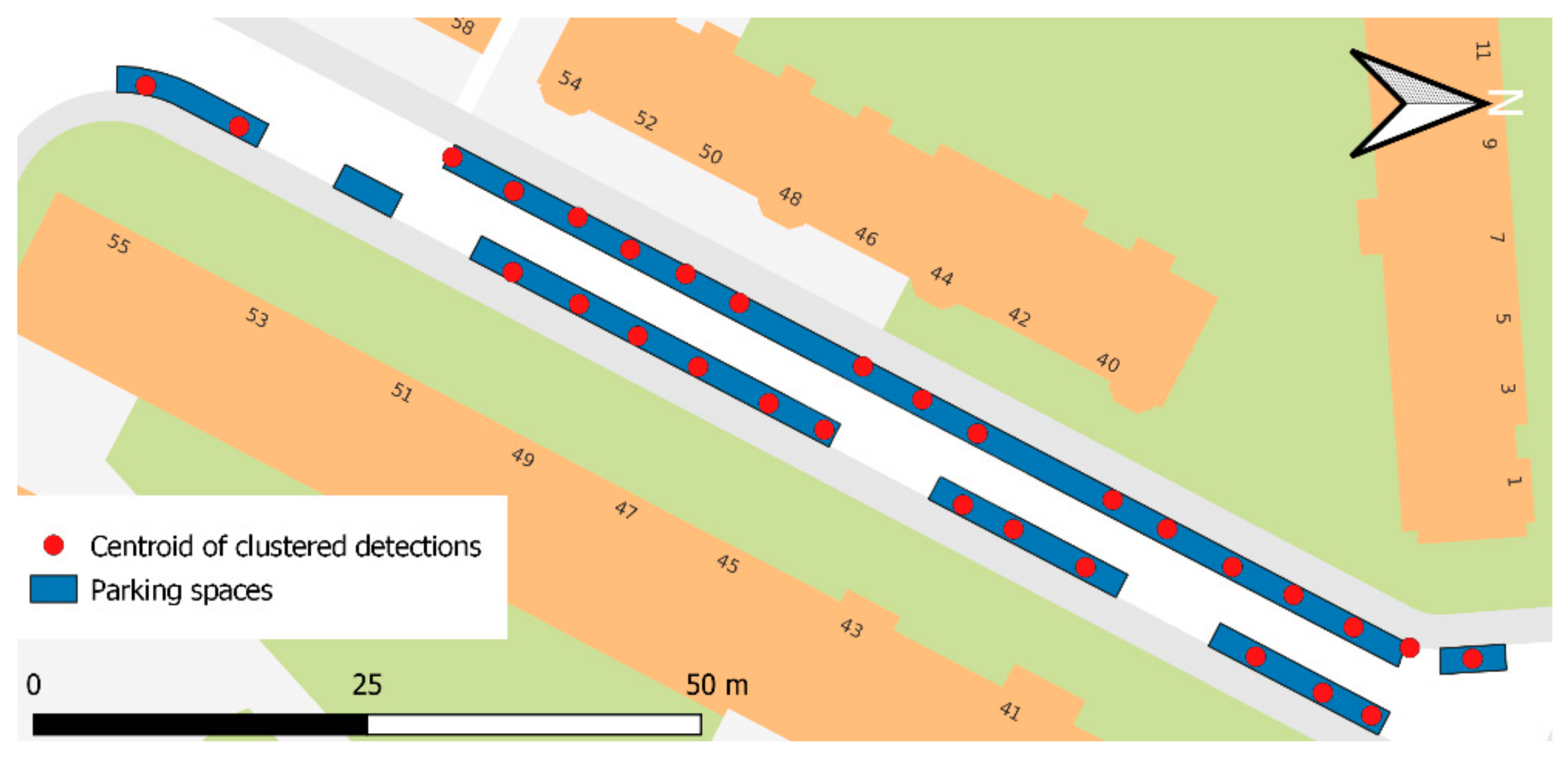
3.4.2. GIS Analysis
4. Experiments and Results
- Georeferencing investigations in demanding urban environments
- 3D camera performance evaluation in indoor and outdoor settings
- AI-based 3D vehicle detection experiments in a representative urban environment with different parking types.
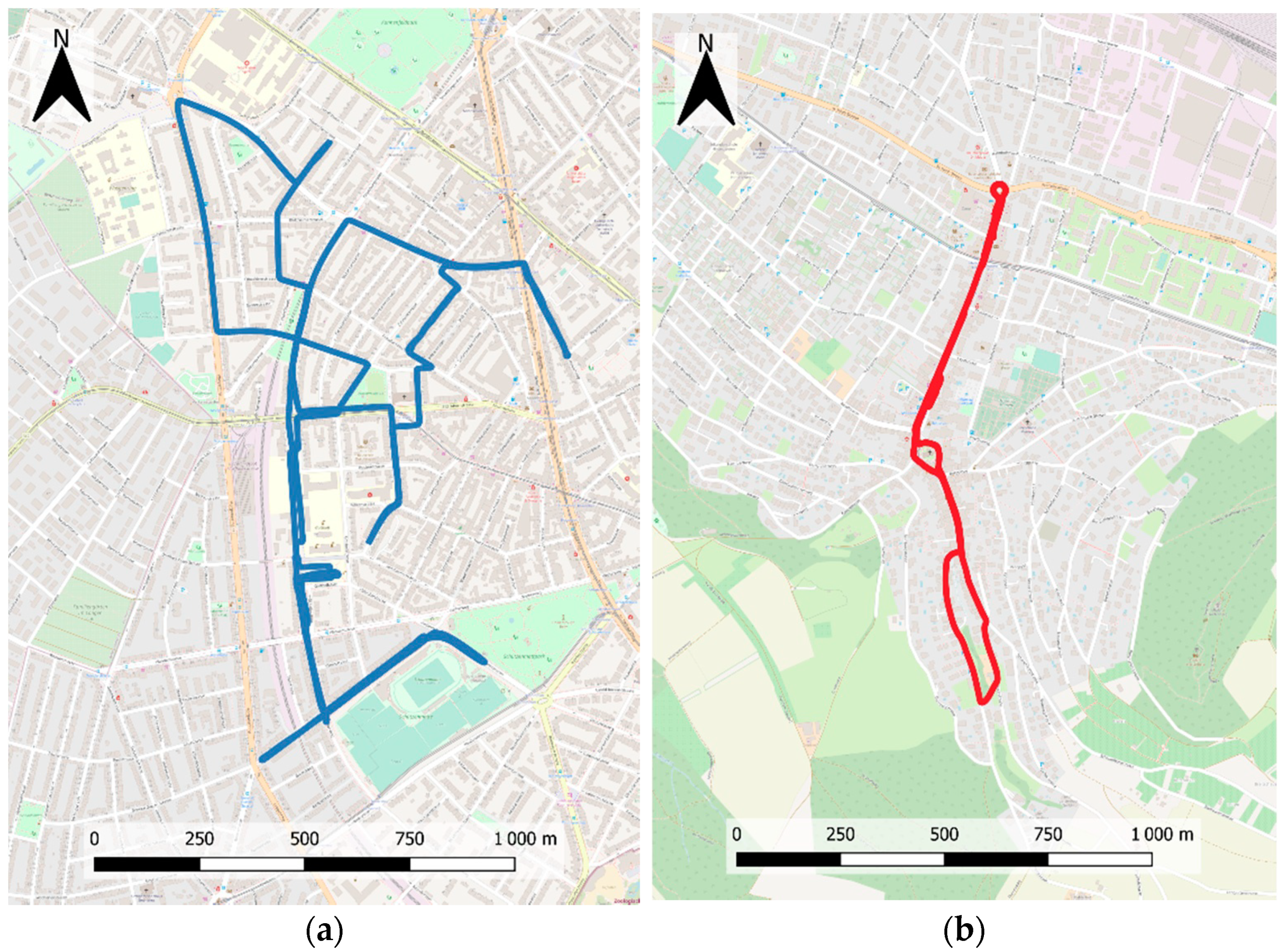
4.1. Study Areas and Data
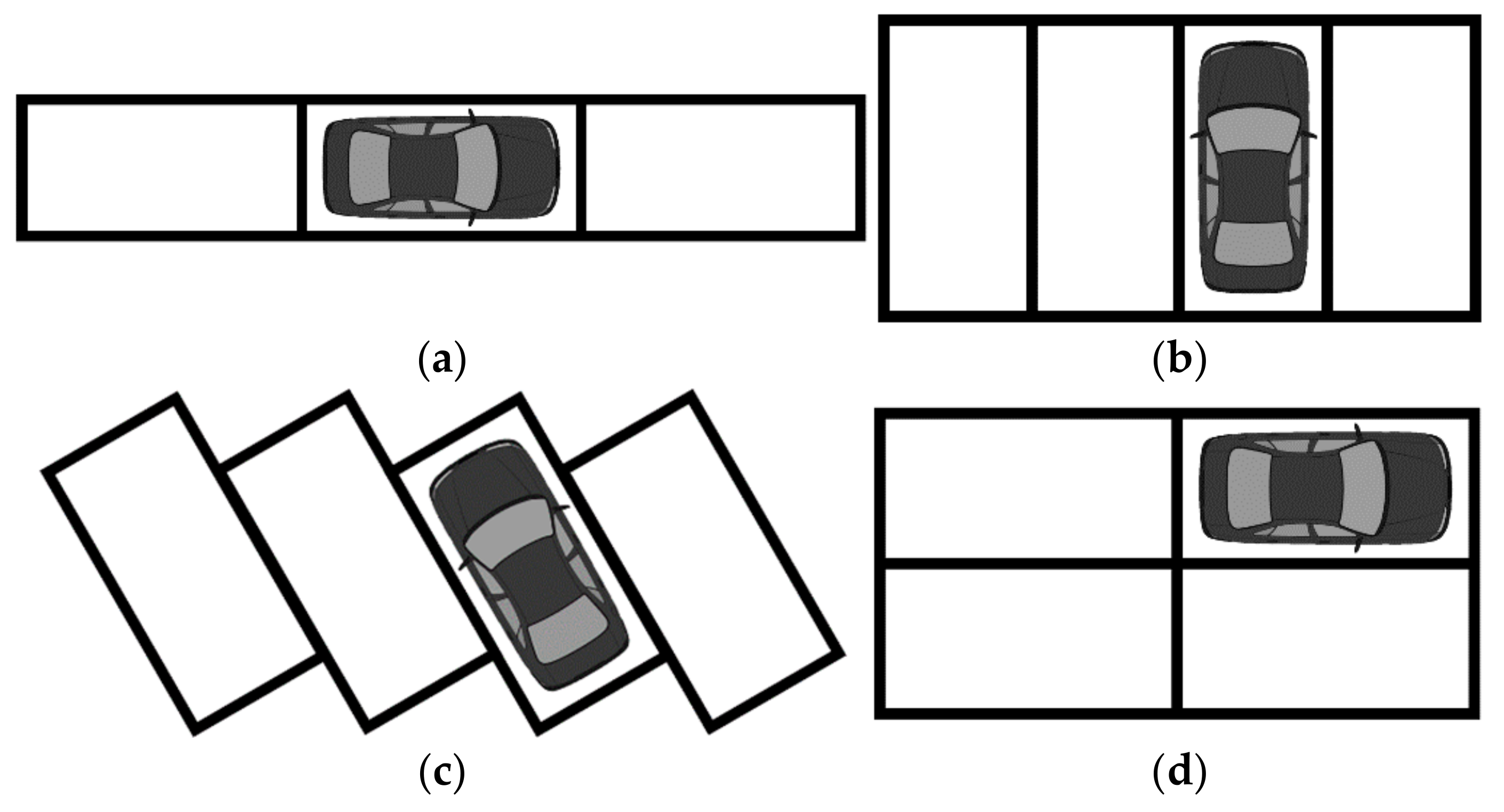
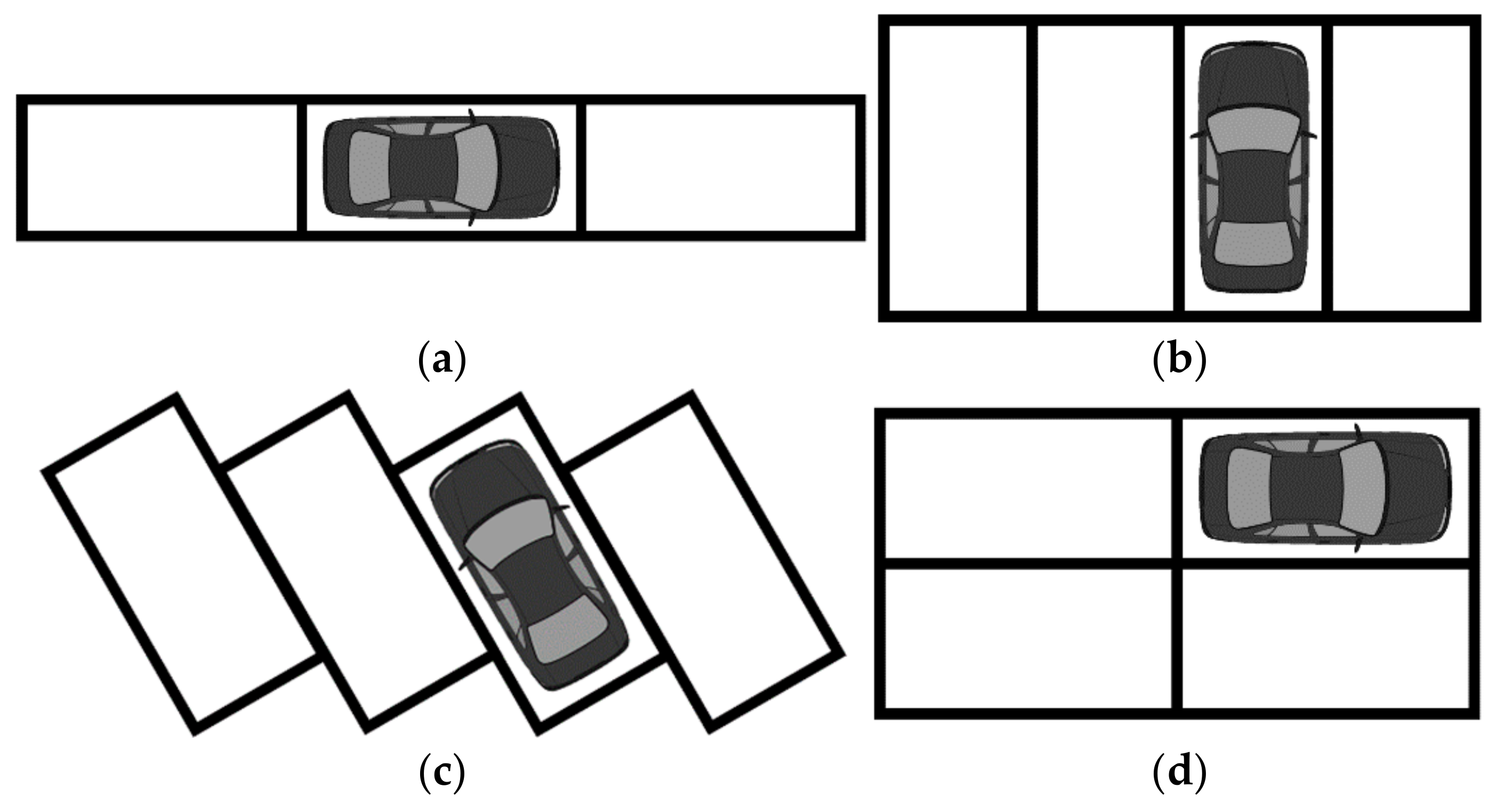
Investigated On-Street Parking Types
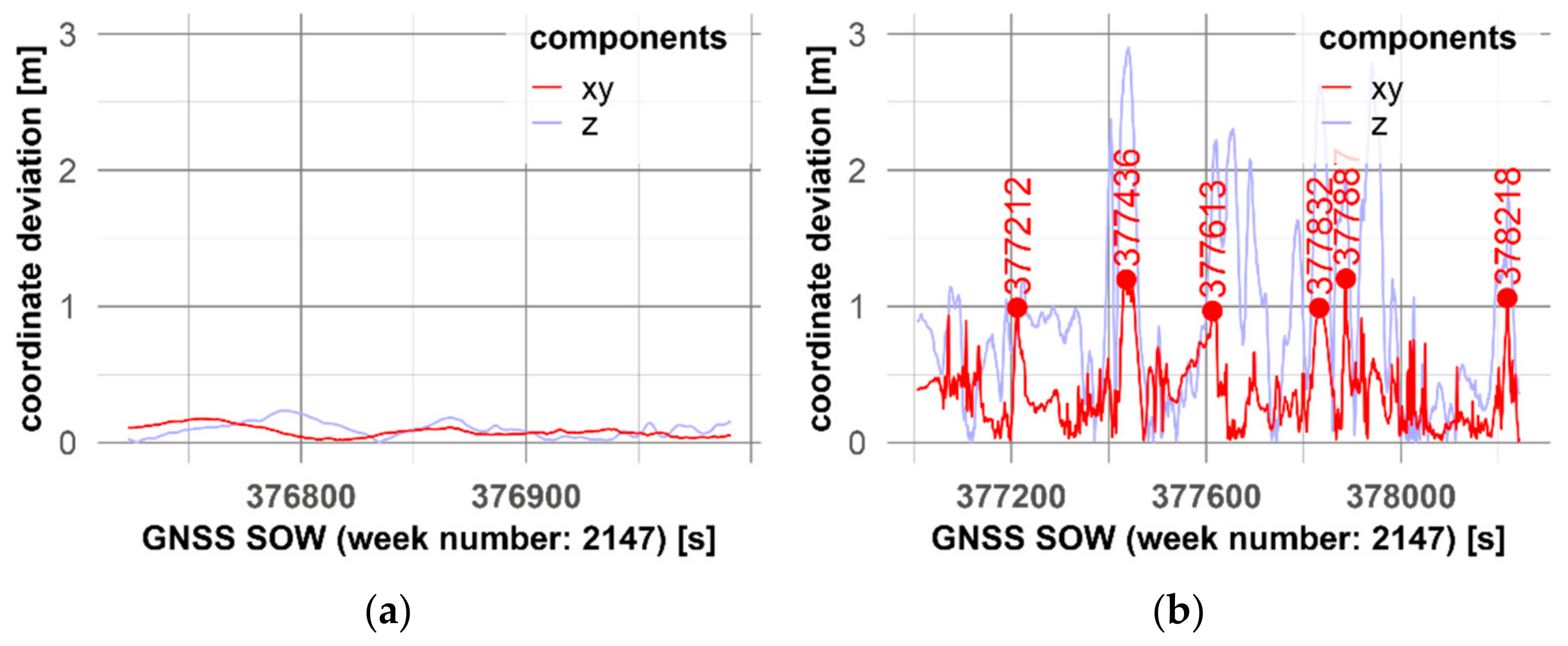
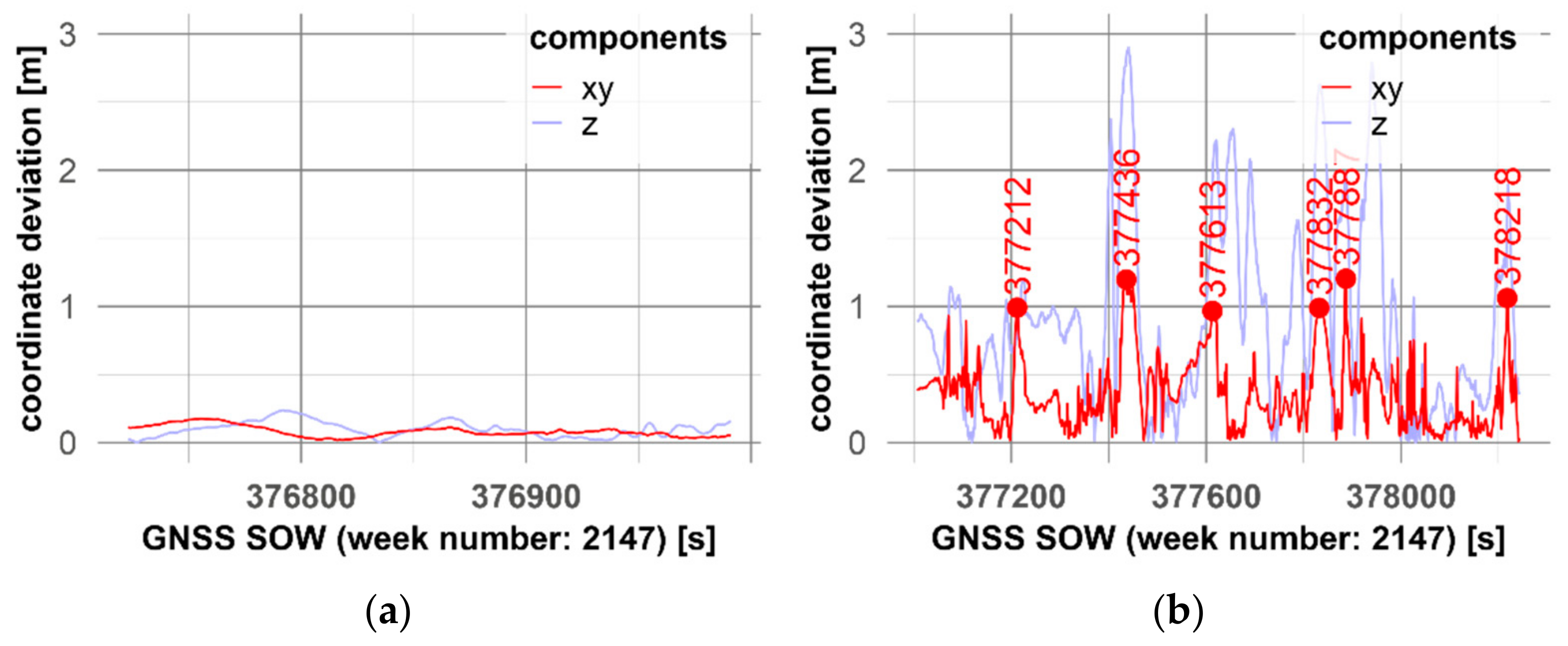
4.2. Georeferencing Investigations
4.3. 3D Camera Performance Evaluation
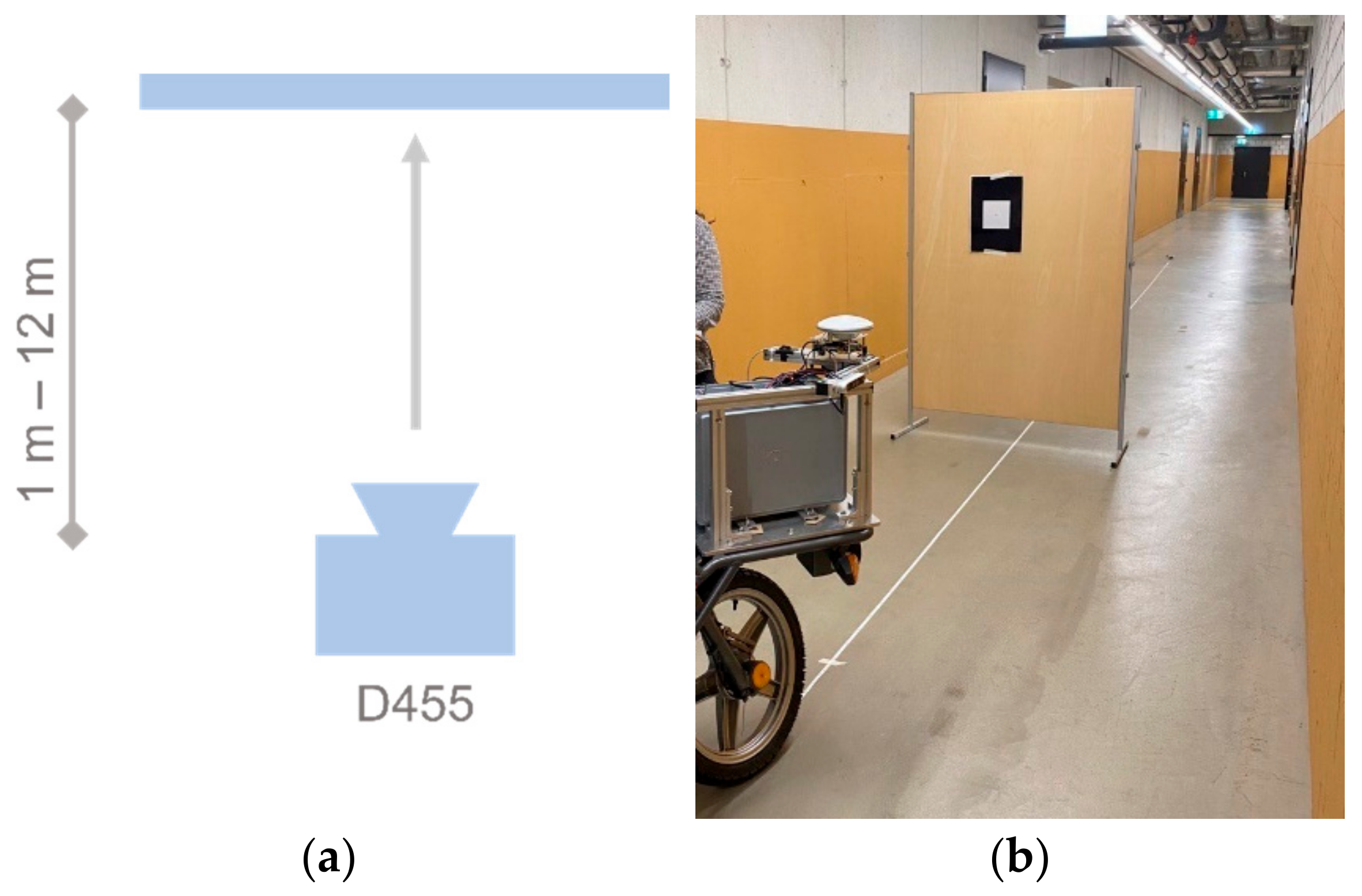
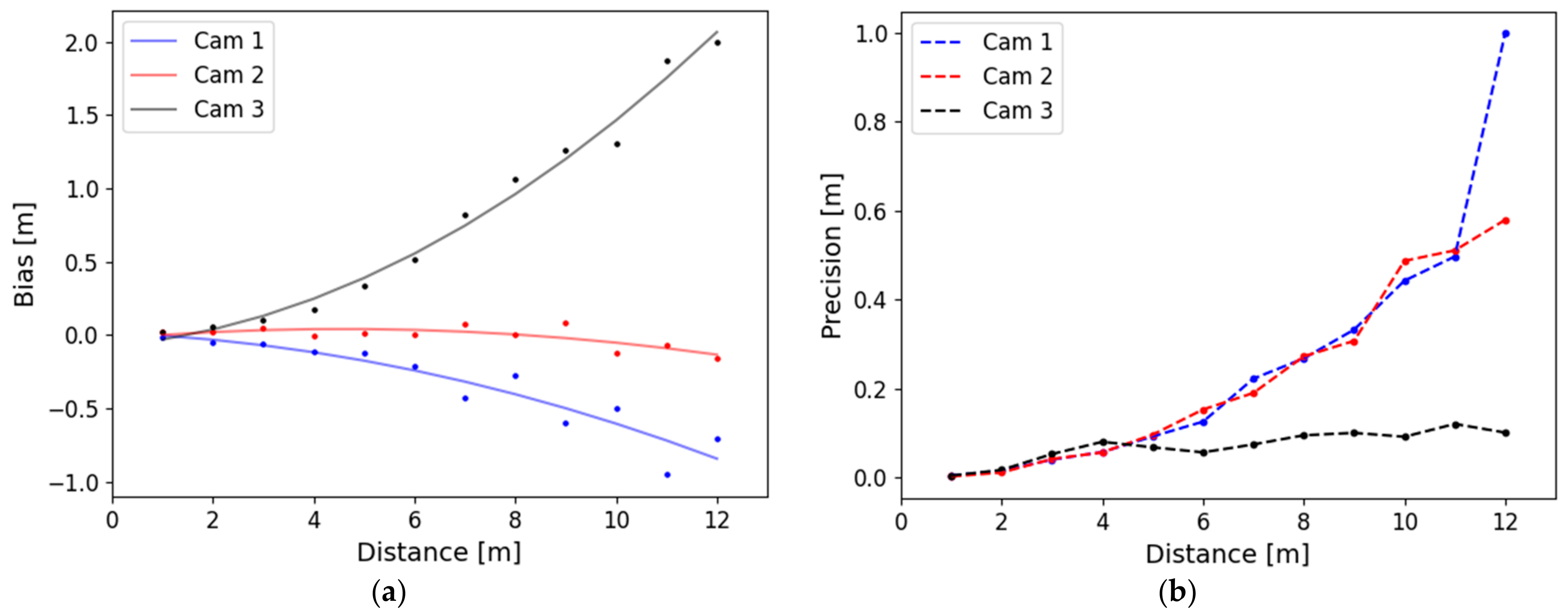
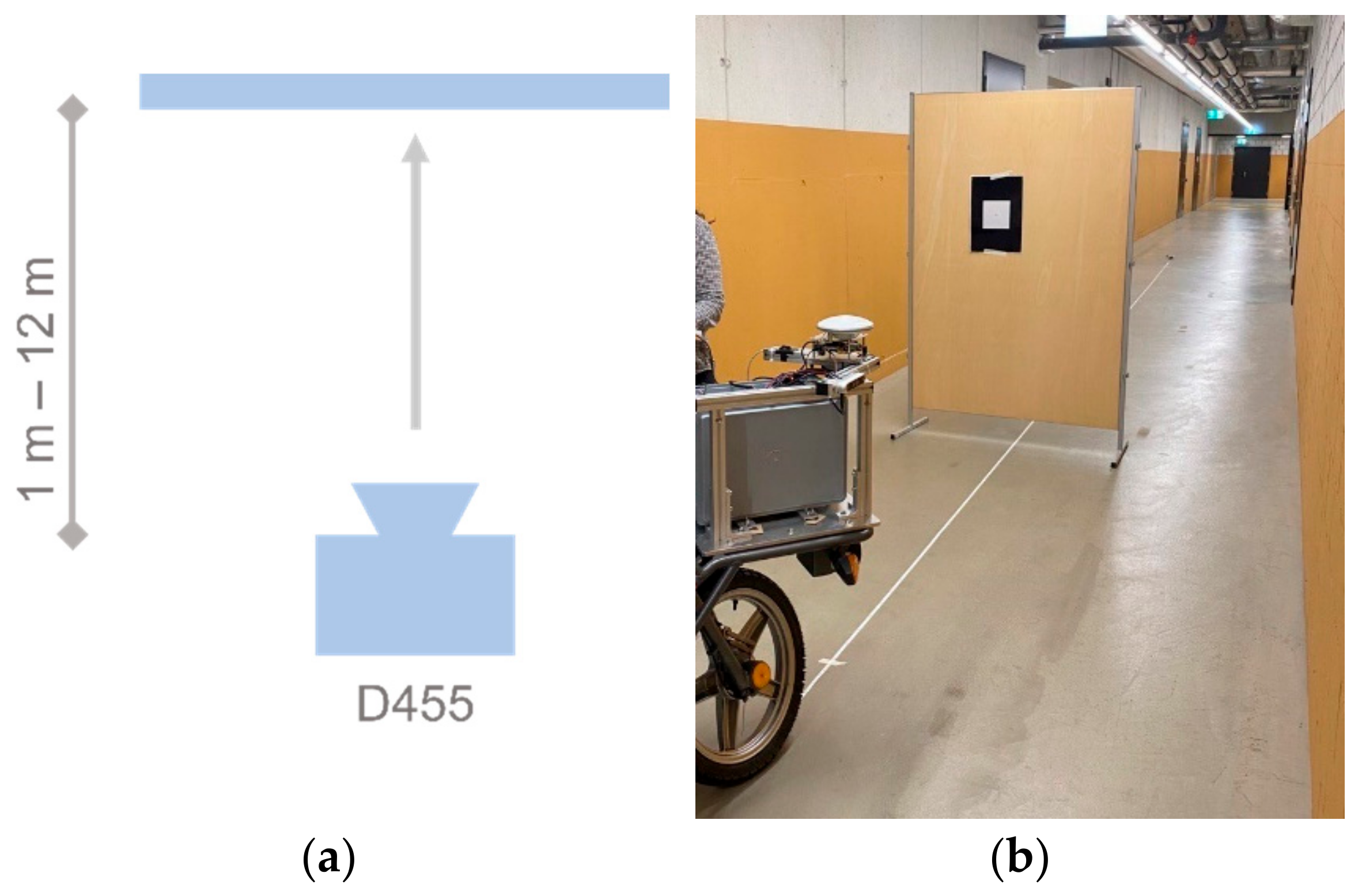
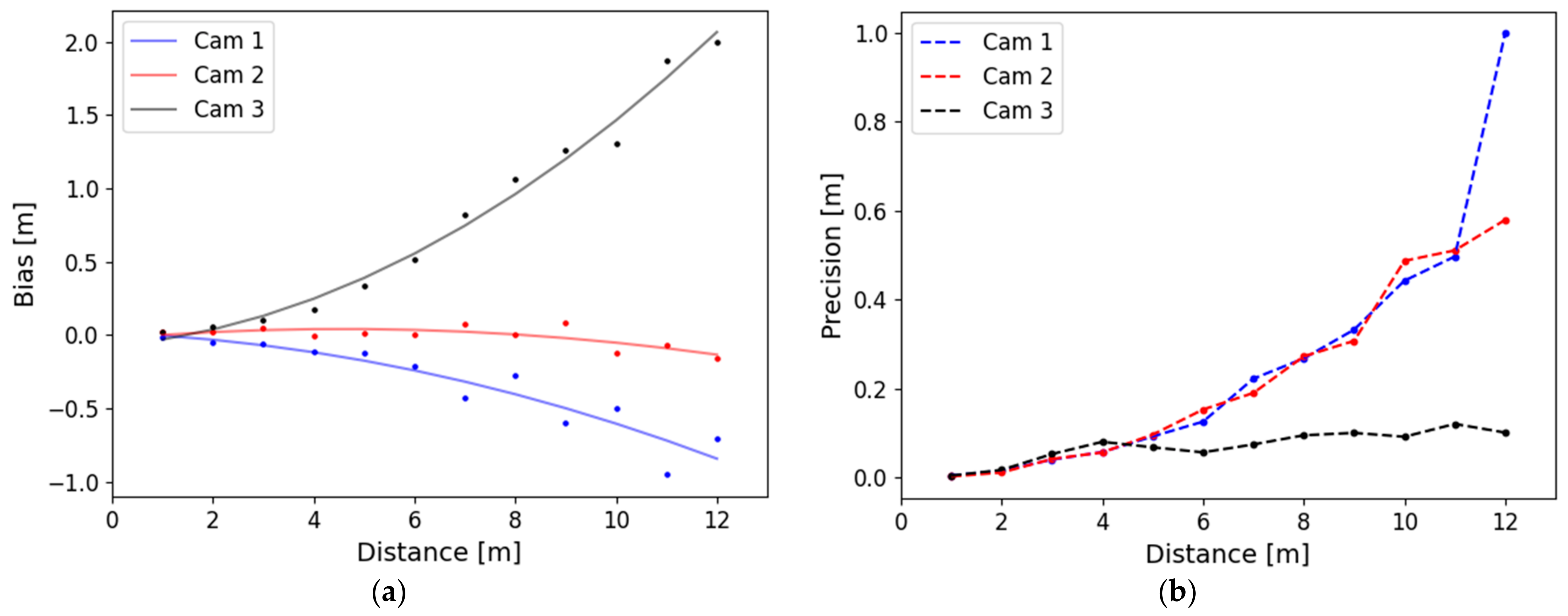
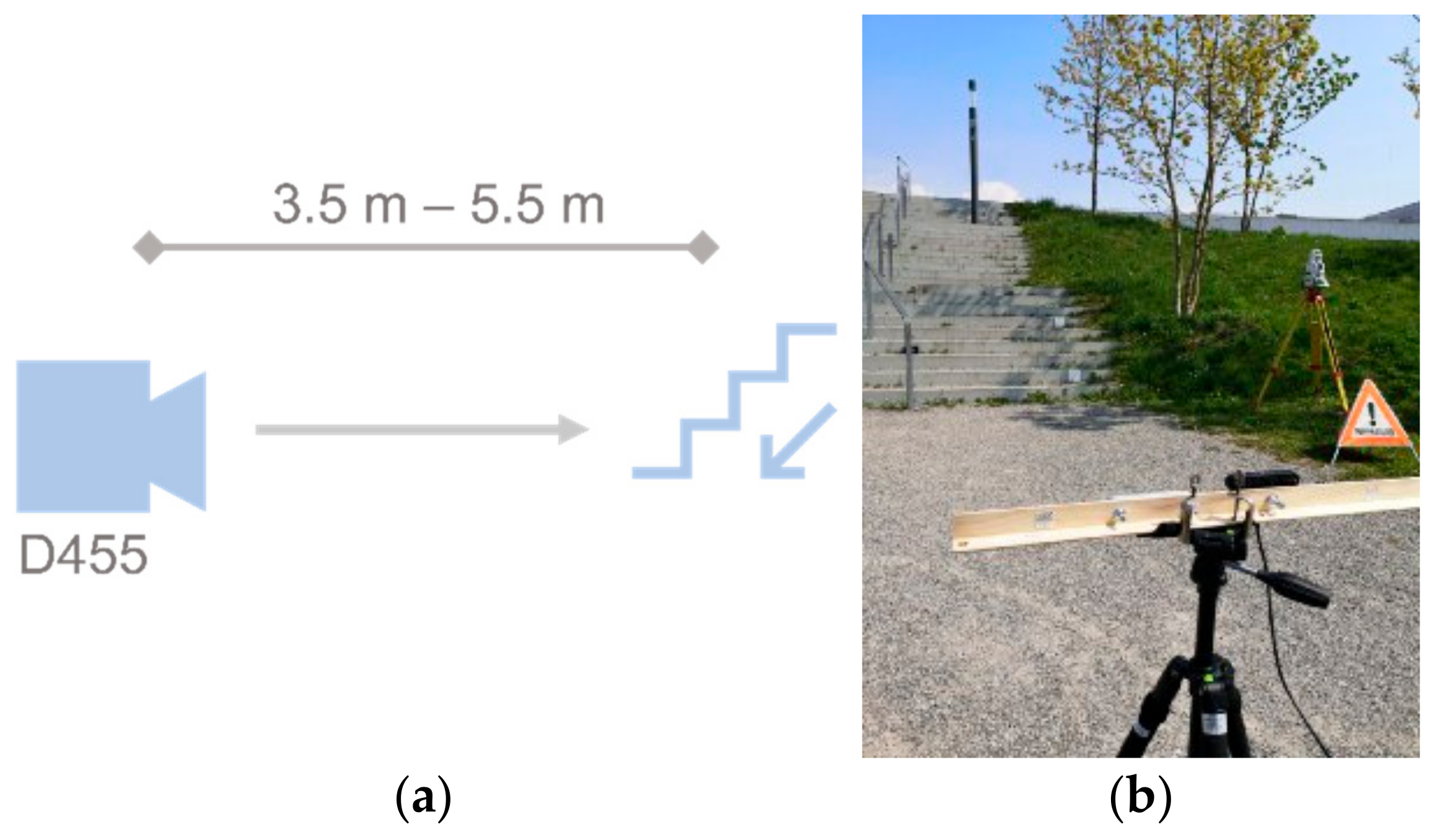
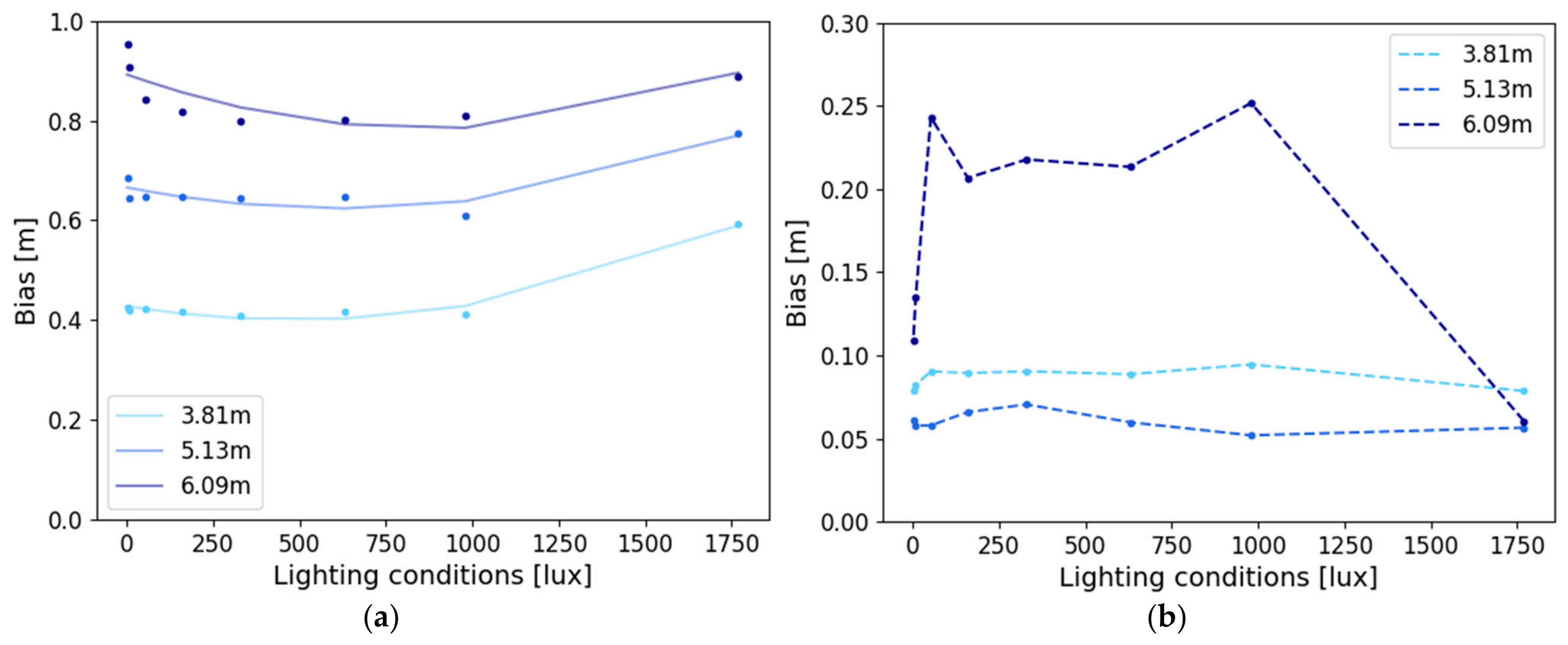
4.3.1. Distance-Dependent Depth Estimation
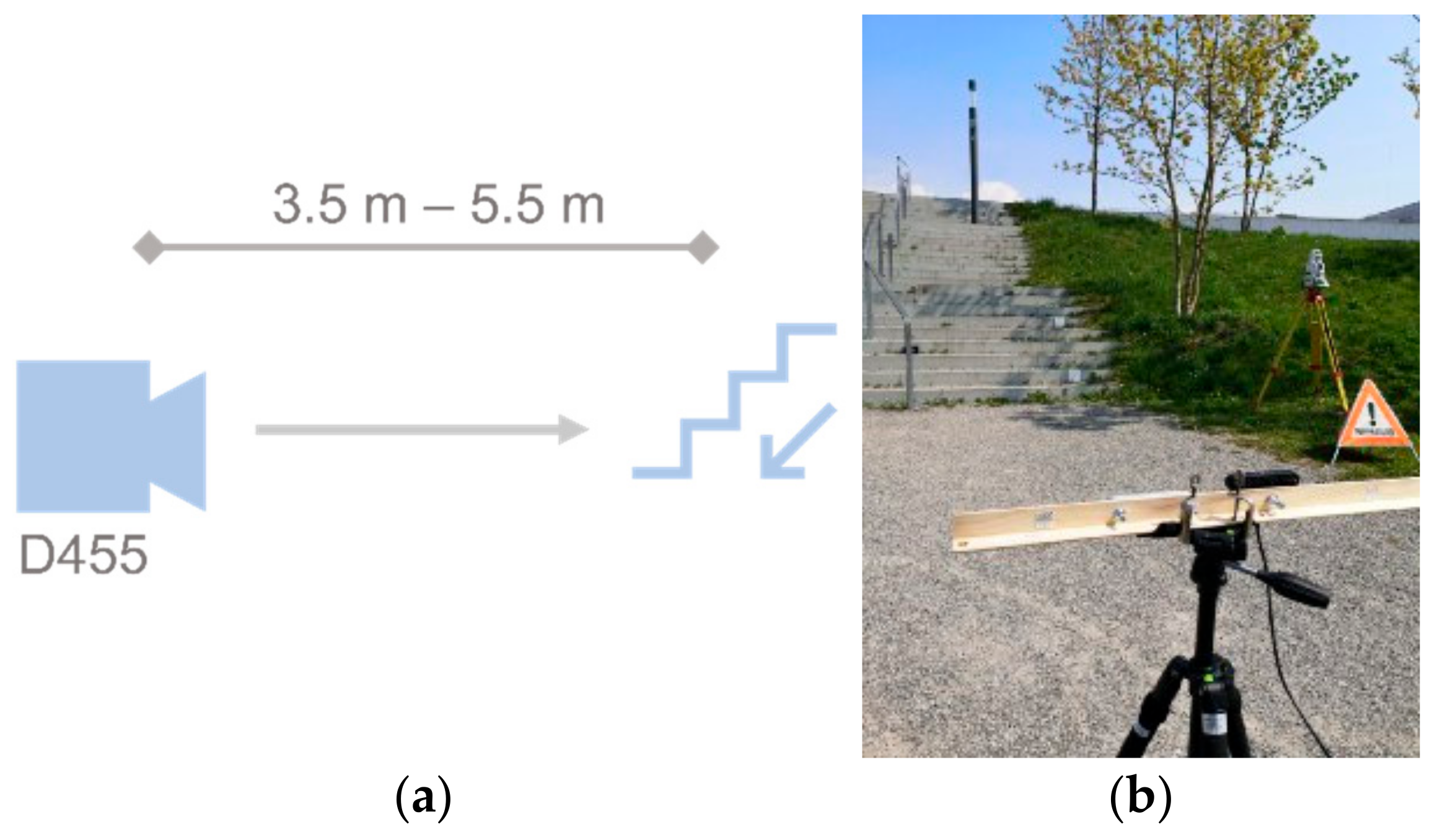
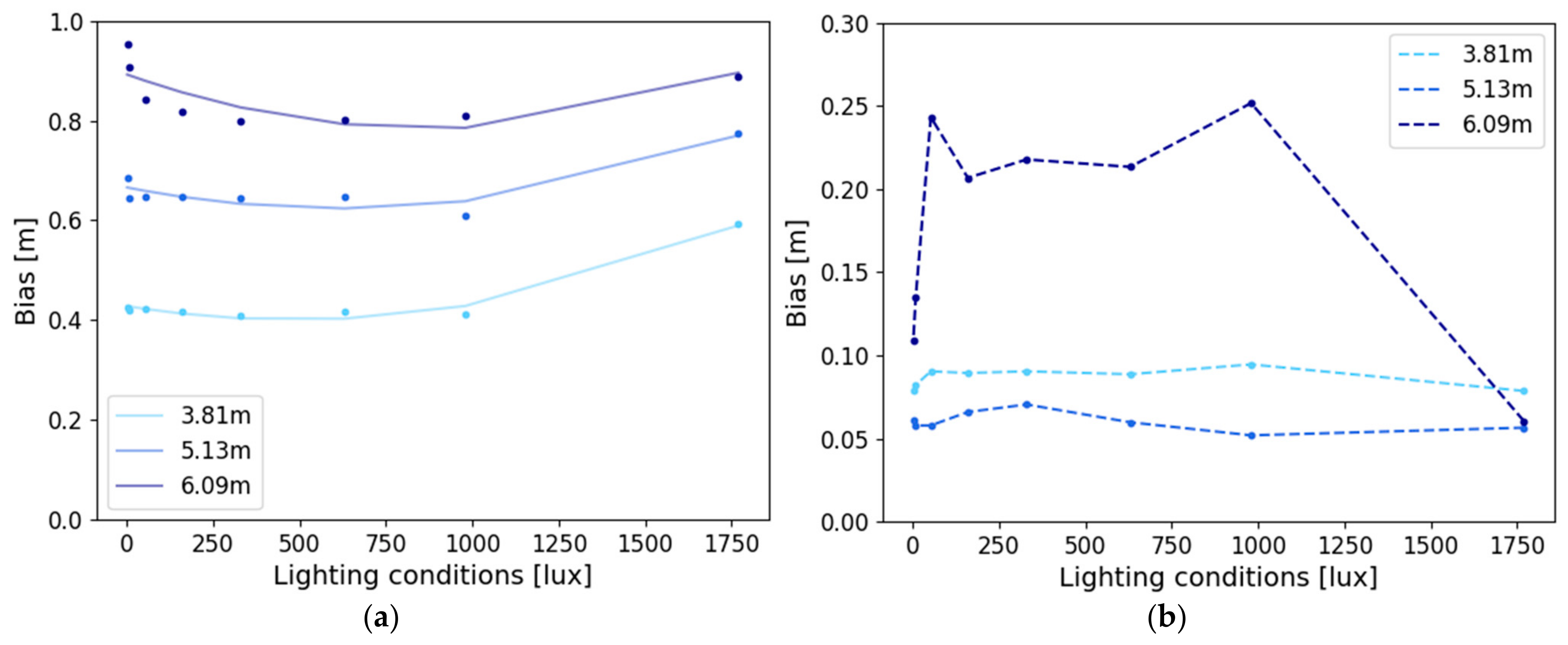
4.3.2. Influence of Lighting Conditions on Outdoor Measurements
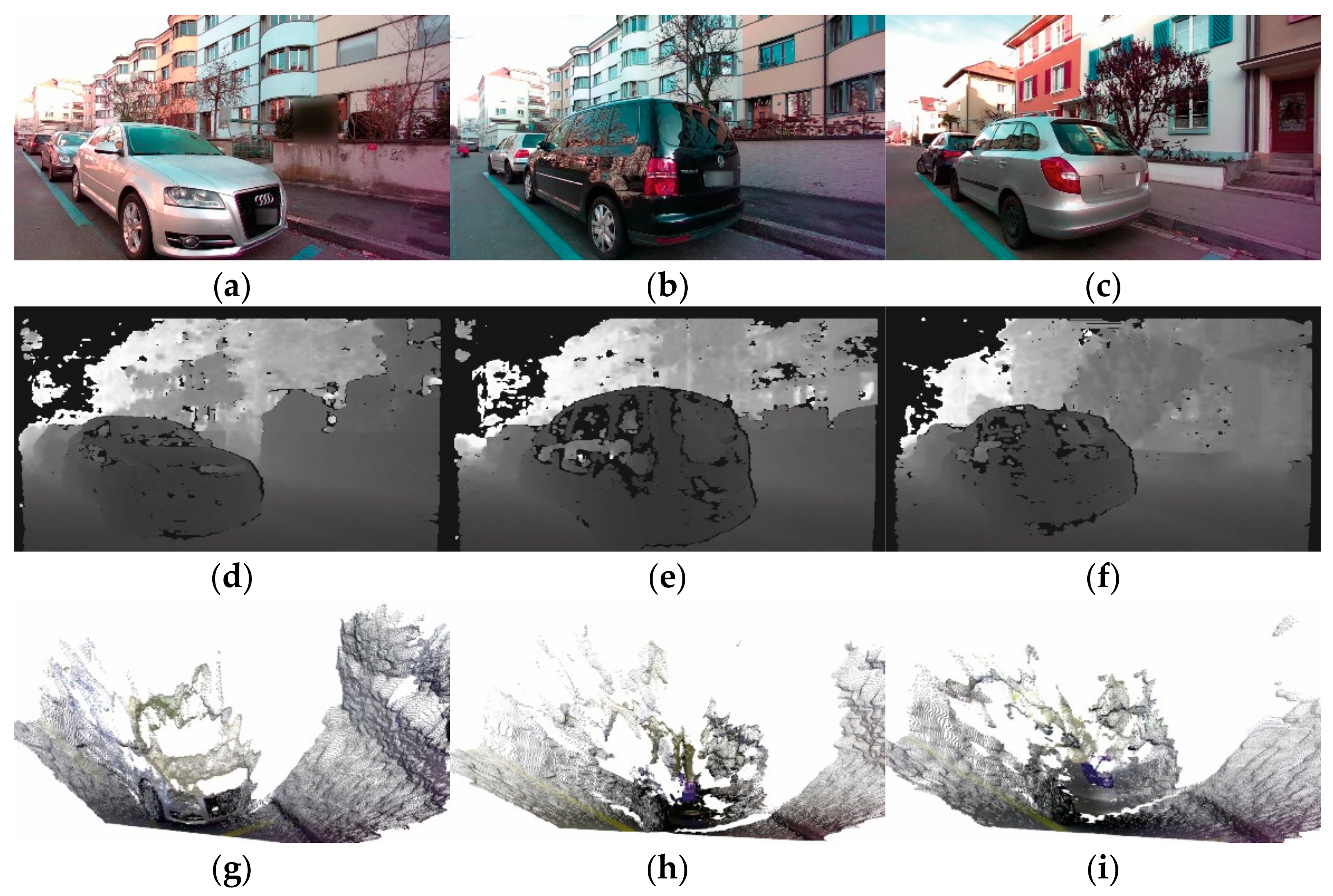
4.4. AI-Based 3D Vehicle Detection
5. Discussion
5.1. Georeferencing Investigations
5.2. 3D Camera Performance
5.3. 3D Object Detection Evaluation
5.4. Overall Capabilities and Performance
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shoup, D.C. Cruising for Parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Rapp Trans AG Basel-Stadt. Erhebung Parkplatzauslastung Stadt Basel 2019; Version 1; RAPP Group: Basel, Switzerland, 2019. [Google Scholar]
- Mathur, S.; Jin, T.; Kasturirangan, N.; Chandrasekaran, J.; Xue, W.; Gruteser, M.; Trappe, W. ParkNet. In Proceedings of the 8th International Conference on Mobile Systems, Applications and Services—MobiSys’10, San Francisco, CA, USA, 15–18 June 2010; p. 123. [Google Scholar] [CrossRef]
- Bock, F.; Eggert, D.; Sester, M. On-Street Parking Statistics Using LiDAR Mobile Mapping. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2812–2818. [Google Scholar] [CrossRef]
- Fetscher, S. Automatische Analyse von Streetlevel-Bilddaten Für das Digitale Parkplatzmanagement. Bachelor’s Thesis, FHNW University of Applied Sciences and Arts Northwestern Switzerland, Muttenz, Switzerland, 2020. [Google Scholar]
- Polycarpou, E.; Lambrinos, L.; Protopapadakis, E. Smart Parking Solutions for Urban Areas. In Proceedings of the 2013 IEEE 14th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Madrid, Spain, 4–7 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Paidi, V.; Fleyeh, H.; Håkansson, J.; Nyberg, R.G. Smart Parking Sensors, Technologies and Applications for Open Parking Lots: A Review. IET Intell. Transp. Syst. 2018, 12, 735–741. [Google Scholar] [CrossRef]
- Barriga, J.J.; Sulca, J.; León, J.L.; Ulloa, A.; Portero, D.; Andrade, R.; Yoo, S.G. Smart Parking: A Literature Review from the Technological Perspective. Appl. Sci. 2019, 9, 4569. [Google Scholar] [CrossRef] [Green Version]
- Houben, S.; Komar, M.; Hohm, A.; Luke, S.; Neuhausen, M.; Schlipsing, M. On-Vehicle Video-Based Parking Lot Recognition with Fisheye Optics. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 7–12. [Google Scholar] [CrossRef]
- Suhr, J.; Jung, H. A Universal Vacant Parking Slot Recognition System Using Sensors Mounted on Off-the-Shelf Vehicles. Sensors 2018, 18, 1213. [Google Scholar] [CrossRef] [Green Version]
- Grassi, G.; Jamieson, K.; Bahl, P.; Pau, G. Parkmaster: An in–Vehicle, Edge–Based Video Analytics Service for Detecting Open Parking Spaces in Urban Environments. In Proceedings of the Second ACM/IEEE Symposium on Edge Computing, San Jose, CA, USA, 12–14 October 2017; pp. 1–14. [Google Scholar] [CrossRef] [Green Version]
- Nebiker, S.; Cavegn, S.; Loesch, B. Cloud-Based Geospatial 3D Image Spaces—A Powerful Urban Model for the Smart City. ISPRS Int. J. Geo-Inf. 2015, 4, 2267–2291. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Kirillov, A.; Massa, F.; Lo, W.-Y.; Girshick, R. Detectron2. 2019. Available online: https://github.com/facebookresearch/detectron2 (accessed on 3 August 2021).
- Ulrich, L.; Vezzetti, E.; Moos, S.; Marcolin, F. Analysis of RGB-D Camera Technologies for Supporting Different Facial Usage Scenarios. Multimed. Tools Appl. 2020, 79, 29375–29398. [Google Scholar] [CrossRef]
- Kuznetsova, A.; Leal-Taixe, L.; Rosenhahn, B. Real-Time Sign Language Recognition Using a Consumer Depth Camera. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013; pp. 83–90. [Google Scholar] [CrossRef]
- Jain, H.P.; Subramanian, A.; Das, S.; Mittal, A. Real-Time Upper-Body Human Pose Estimation Using a Depth Camera. In Proceedings of the International Conference on Computer Vision/Computer Graphics Collaboration Techniques and Applications, Rocquencourt, France, 10–11 October 2011; pp. 227–238. [Google Scholar]
- Zollhöfer, M.; Stotko, P.; Görlitz, A.; Theobalt, C.; Nießner, M.; Klein, R.; Kolb, A. State of the Art on 3D Reconstruction with RGB-D Cameras. Comput. Graph. Forum 2018, 37, 625–652. [Google Scholar] [CrossRef]
- Holdener, D.; Nebiker, S.; Blaser, S. Design and Implementation of a Novel Portable 360° Stereo Camera System with Low-Cost Action Cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 105–110. [Google Scholar] [CrossRef] [Green Version]
- Hasler, O.; Blaser, S.; Nebiker, S. Performance evaluation of a mobile mapping application using smartphones and augmented reality frameworks. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 741–747. [Google Scholar] [CrossRef]
- Torresani, A.; Menna, F.; Battisti, R.; Remondino, F. A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sens. 2021, 13, 2351. [Google Scholar] [CrossRef]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D Mapping: Using Kinect-Style Depth Cameras for Dense 3D Modeling of Indoor Environments. Int. J. Rob. Res. 2012, 31, 647–663. [Google Scholar] [CrossRef] [Green Version]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D Mapping: Using Depth Cameras for Dense 3D Modeling of Indoor Environments. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 477–491. [Google Scholar]
- Brahmanage, G.; Leung, H. Outdoor RGB-D Mapping Using Intel-RealSense. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Iwaszczuk, D.; Koppanyi, Z.; Pfrang, J.; Toth, C. Evaluation of a mobile multi-sensor system for seamless outdoor and indoor mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-1/W2, 31–35. [Google Scholar] [CrossRef]
- Halmetschlager-Funek, G.; Suchi, M.; Kampel, M.; Vincze, M. An Empirical Evaluation of Ten Depth Cameras: Bias, Precision, Lateral Noise, Different Lighting Conditions and Materials, and Multiple Sensor Setups in Indoor Environments. IEEE Robot. Autom. Mag. 2019, 26, 67–77. [Google Scholar] [CrossRef]
- Lourenço, F.; Araujo, H. Intel RealSense SR305, D415 and L515: Experimental Evaluation and Comparison of Depth Estimation. In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021), Online Streaming, 8–10 February 2021; Volume 4, pp. 362–369. [Google Scholar] [CrossRef]
- Vit, A.; Shani, G. Comparing RGB-D Sensors for Close Range Outdoor Agricultural Phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.Q.; Zheng, P.; Xu, S.T.; Wu, X. Object Detection with Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [Green Version]
- Friederich, J.; Zschech, P. Review and Systematization of Solutions for 3d Object Detection. In Proceedings of the 15th International Conference on Business Information Systems, Potsdam, Germany, 8–11 March 2020. [Google Scholar] [CrossRef]
- Arnold, E.; Al-Jarrah, O.Y.; Dianati, M.; Fallah, S.; Oxtoby, D.; Mouzakitis, A. A Survey on 3D Object Detection Methods for Autonomous Driving Applications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Wang, X.; Li, H. PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 770–779. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Guo, C.; Jiang, L.; Wang, Z.; Shi, J.; Wang, X.; Li, H. PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 10526–10535. [Google Scholar] [CrossRef]
- KITTI 3D Object Detection Online Benchmark. Available online: http://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d (accessed on 29 July 2021).
- Zheng, W.; Tang, W.; Jiang, L.; Fu, C.-W. SE-SSD: Self-Ensembling Single-Stage Object Detector from Point Cloud. arXiv 2021, arXiv:2104.09804. [Google Scholar]
- Li, Z.; Yao, Y.; Quan, Z.; Yang, W.; Xie, J. SIENet: Spatial Information Enhancement Network for 3D Object Detection from Point Cloud. arXiv 2021, arXiv:2103.15396. [Google Scholar]
- Deng, J.; Shi, S.; Li, P.; Zhou, W.; Zhang, Y.; Li, H. Voxel R-CNN: Towards High Performance Voxel-Based 3D Object Detection. arXiv 2020, arXiv:2012.15712. [Google Scholar]
- Qi, C.R.; Liu, W.; Wu, C.; Su, H.; Guibas, L.J. Frustum PointNets for 3D Object Detection from RGB-D Data. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 918–927. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Jia, K. Frustum ConvNet: Sliding Frustums to Aggregate Local Point-Wise Features for Amodal. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 1742–1749. [Google Scholar] [CrossRef]
- Swift Navigation, I. PiksiMulti GNSS Module Hardware Specification. 2019, p. 10. Available online: https://www.swiftnav.com/latest/piksi-multi-hw-specification (accessed on 3 August 2021).
- Intel Corporation. Intel®RealSense Product Family D400 Series: Datasheet. 2020, p. 134. Available online: https://dev.intelrealsense.com/docs/intel-realsense-d400-series-product-family-datasheet (accessed on 3 August 2021).
- nVidia Developers. Jetson TX2 Module. Available online: https://developer.nvidia.com/embedded/jetson-tx2 (accessed on 29 July 2021).
- Blaser, S.; Meyer, J.; Nebiker, S.; Fricker, L.; Weber, D. Centimetre-accuracy in forests and urban canyons—Combining a high-performance image-based mobile mapping backpack with new georeferencing methods. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 1, 333–341. [Google Scholar] [CrossRef]
- Blaser, S.; Cavegn, S.; Nebiker, S. Development of a Portable High Performance Mobile Mapping System Using the Robot Operating System. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 13–20. [Google Scholar] [CrossRef] [Green Version]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Mg, A. ROS: An Open-Source Robot Operating System. ICRA Workshop Open Source Softw. 2009, 3, 5. [Google Scholar]
- Dorodnicov, S.; Hirshberg, D. Realsense2_Camera. Available online: http://wiki.ros.org/realsense2_camera (accessed on 29 July 2021).
- NovAtel. Inertial Explorer 8.9 User Manual. 2020, p. 236. Available online: https://docs.novatel.com/Waypoint/Content/PDFs/Waypoint_Software_User_Manual_OM-20000166.pdf (accessed on 3 August 2021).
- understand.ai. Anonymizer. Karlsruhe, Germany, 2019. Available online: https://github.com/understand-ai/anonymizer (accessed on 3 August 2021).
- OpenPCDet Development Team. OpenPCDet: An Open-source Toolbox for 3D Object Detection from Point Clouds. Available online: https://github.com/open-mmlab/OpenPCDet (accessed on 29 July 2021).
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. Pointpillars: Fast Encoders for Object Detection from Point Clouds. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 12689–12697. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Mao, Y.; Li, B. Second: Sparsely Embedded Convolutional Detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Wang, Z.; Shi, J.; Wang, X.; Li, H. From Points to Parts: 3D Object Detection from Point Cloud with Part-Aware and Part-Aggregation Network. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 1, 2977026. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geiger, A.; Lenz, P.; Urtasun, R. Are We Ready for Autonomous Driving? The KITTI Vision Benchmark Suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar] [CrossRef]
- Butler, H.; Daly, M.; Doyle, A.; Gillies, S.; Hagen, S.; Schaub, T. The GeoJSON Format. RFC 7946. IETF Internet Eng. Task Force 2016. Available online: https://www.rfc-editor.org/info/rfc7946 (accessed on 30 June 2021). [CrossRef]
- QGIS Development Team. QGIS Geographic Information System. Open Source Geospatial Foundation. 2009. Available online: https://qgis.org/en/site/ (accessed on 3 August 2021).
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, OR, USA, 2–4 August 1996; Volume 96, pp. 226–231. [Google Scholar]
- Cavegn, S.; Nebiker, S.; Haala, N. A Systematic Comparison of Direct and Image-Based Georeferencing in Challenging Urban Areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 529–536. [Google Scholar] [CrossRef] [Green Version]
- Frey, J. Bildbasierte Lösung für das mobile Parkplatzmonitoring. Master’s Thesis, FHNW University of Applied Sciences and Arts Northwestern Switzerland, Muttenz, Switzerland, 2021. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RGB Sensors | Depth Sensors | |
|---|---|---|
| Shutter Type | Global Shutter | Global Shutter |
| Image Sensor | OV9782 | OV9282 |
| Max Framerate | 90 fps (with max resolution 30 fps) | 90 fps (with max resolution 30 fps) |
| Resolution | 1 MP (1280 × 800 px/3 µm) | 1 MP (1280 × 720 px/3 µm) |
| Field of View | H:87° ± 3/V:58° ± 1/D:95° ± 3 | H:87° ± 3/V:58° ± 1/D:95° ± 3 |
| Test Campaign Characteristics | Basel City | Muttenz |
|---|---|---|
| Main purpose | Evaluation of 3D vehicle detection for different on-street parking types | Georeferencing investigations with parallel operation of the low-cost MMS and a high-end reference MMS |
| Payload/Sensors | Front: Low-cost MM payload with single RealSense D455 | Front: Low-cost MM payload with dual RealSense D455 Back: High-end BIMAGE Backpack as a reference system (for configuration, see Figure 2a) |
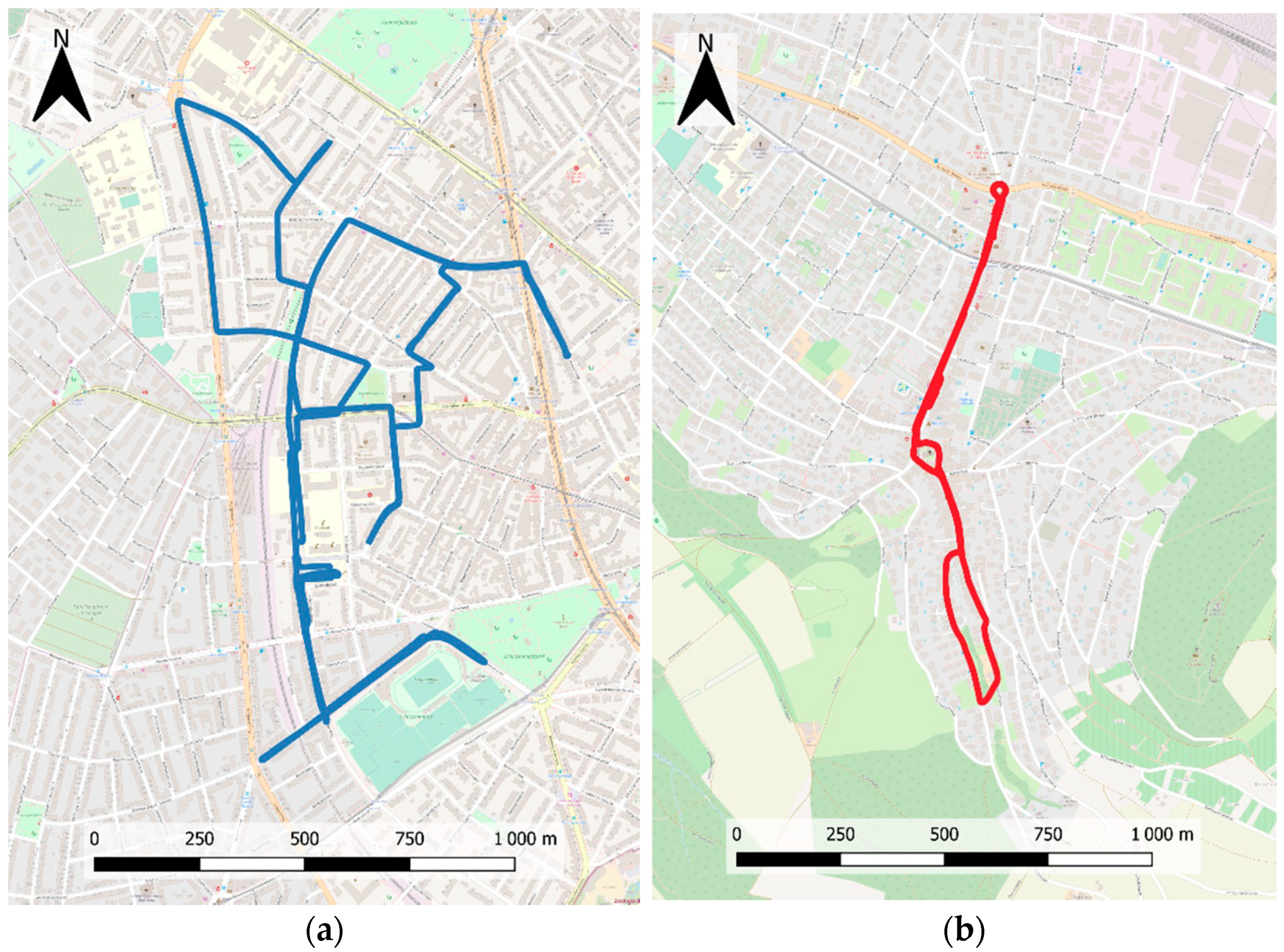
| Characteristics of test area | Residential district, west of the city center of Basel; roads often lined by multi-story buildings and trees; route mostly flat, selected to encompass a large variety of parking slot types | Suburban town located southeast of Basel; route passing shopping district and historical center; route partially lined by large trees; partially steep roads and large elevation differences |
| Acquisition date | 11 December 2020 | 3 April 2021 |
| Trajectory length | 9.7 km | 3.4 km |
| Average acquisition speed | 9 km/h | 10 km/h |
| GNSS epochs | ~3500 | ~3500 |
| Image capturing frame rates | 5 fps (D455) | 5 fps (D455)/1 fps (BIMAGE) |
| Number of RGB-D images | 22,382 | 5443 |
| Cam 1 (Blue) | Cam 2 (Red) | Cam 3 (Black) | ||||
|---|---|---|---|---|---|---|
| Bias | Precision | Bias | Precision | Bias | Precision | |
| 4 m | −11 cm (2.8%) | 5.7 cm (1.4%) | −1 cm (0.3%) | 5.6 cm (1.4%) | 17 cm (4.3%) | 8.0 cm (2.0%) |
| 8 m | −27 cm (3.4%) | 26.8 cm (3.4%) | 0 cm (0.0%) | 27.2 cm (3.4%) | 106 cm (13.3%) | 9.4 cm (1.2%) |
| Parallel | Perpendicular | Angle | 2 × 2 | Overall | |
|---|---|---|---|---|---|
| True positive | 163 | 49 | 24 | 3 | 239 |
| True negative | 36 | 26 | 4 | 1 | 67 |
| False positive | 0 | 0 | 0 | 0 | 0 |
| False negative | 0 | 3 | 1 | 3 | 7 |
| Precision | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 |
| Recall | 1.00 | 0.94 | 0.96 | 0.50 | 0.97 |
| Mathur et al. [3] | Bock et al. [4] | Grassi et al. [11] | Fetscher [5] | Ours | |
|---|---|---|---|---|---|
| Mapping platform | Probe vehicles (e.g., taxis) | High-end MLS vehicle | Vehicle (dashboard-mounted) | High-end multi-view stereo MMS | Electric Tricycle |
| Mapping sensors/mapping data | Ultrasonic range finder/range profiles | Dual LiDAR/3D point clouds | Smartphone camera/2D imagery | High-end stereo cameras/RGB-D imagery | Low-cost 3D camera/RGB-D imagery |
| Revisit frequency | potentially high | on-demand | potentially high | low | potentially high |
| Supported parking types | parallel only | parallel, perpendicular | parallel only | parallel, angle, perpendicular, 2 × 2 clusters | parallel, angle, perpendicular, 2 × 2 clusters |
| Detection type | gaps (in range profiles) | object segmentation and classification (RF) | image-based car detection | corner detection or clustering | AI-based 3D object detection (PointRCNN) |
| Sample size (# of slots or vehicles) | 57 | 717 | 8176 | 184 | 313 |
| Detection accuracy | ~90% (of free spaces) | Recall 93.7% Precision 97.4% | ~90% | 97.0–98.3% | Recall 97% Precision 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nebiker, S.; Meyer, J.; Blaser, S.; Ammann, M.; Rhyner, S. Outdoor Mobile Mapping and AI-Based 3D Object Detection with Low-Cost RGB-D Cameras: The Use Case of On-Street Parking Statistics. Remote Sens. 2021, 13, 3099. https://doi.org/10.3390/rs13163099
Nebiker S, Meyer J, Blaser S, Ammann M, Rhyner S. Outdoor Mobile Mapping and AI-Based 3D Object Detection with Low-Cost RGB-D Cameras: The Use Case of On-Street Parking Statistics. Remote Sensing. 2021; 13(16):3099. https://doi.org/10.3390/rs13163099
Chicago/Turabian StyleNebiker, Stephan, Jonas Meyer, Stefan Blaser, Manuela Ammann, and Severin Rhyner. 2021. "Outdoor Mobile Mapping and AI-Based 3D Object Detection with Low-Cost RGB-D Cameras: The Use Case of On-Street Parking Statistics" Remote Sensing 13, no. 16: 3099. https://doi.org/10.3390/rs13163099
APA StyleNebiker, S., Meyer, J., Blaser, S., Ammann, M., & Rhyner, S. (2021). Outdoor Mobile Mapping and AI-Based 3D Object Detection with Low-Cost RGB-D Cameras: The Use Case of On-Street Parking Statistics. Remote Sensing, 13(16), 3099. https://doi.org/10.3390/rs13163099