Abstract
We here present an example of the 2016 Kumamoto earthquake with its coseismic surface deformation mapped by the ALOS-2 satellite both in the right- and left-looking observation modes. It provides the opportunity to reveal the coseismic surface deformation and to explore the performance of the unusual left-looking data in faulting model inversion. Firstly, three tracks (ascending and descending right-looking and descending left-looking) of ALOS PALSAR-2 images are used to extract the surface deformation fields. It suggests that the displacements measured by the descending left-looking InSAR coincide well with the ascending right-looking track observations. Then, the location and strike angle of the fault are determined from the SAR pixel offset-tracking technique. A complicated four-segment fault geometry is inferred for explaining the coseismic faulting of the Kumamoto earthquake due to the interpretation of derived deformation fields. Quantitative comparisons between models constrained by the right-looking only data and by joint right- and left-looking data suggest that left-looking InSAR could provide comparable constraints for geodetic modelling to right-looking InSAR. Furthermore, the slip model suggests that the series of events are dominated by the dextral strike-slip with some normal fault motions. The fault rupture initiates on the Hinagu fault segment and propagates from southwest to northeast along the Hinagu fault, then transforms to Futagawa fault with a slip maximum of 4.96 m, and finally ends up at ~7 km NW of the Aso caldera, with a rupture length of ~55 km. The talent of left-looking InSAR in surface deformation detection and coseismic faulting inversion indicates that left-looking InSAR can be effectively utilized in the investigation of the geologic hazards in the future, same as right-looking InSAR.
1. Introduction
Interferometric synthetic aperture radar (InSAR) has been proved as a promising space-geodetic technique, which can provide a spatially high density of ground observations for characterizing earthquake mechanism and co-seismic ground deformation as data constraints [1,2,3,4,5,6]. However, the one-dimensional measurements along line-of-sight (LOS) direction have significantly limited the capability of the InSAR technique in mapping complete surface displacements and, further, have confined the geodetic modelling of seismic ruptures. It is known that InSAR LOS measurements are insensitive to the N-S displacement due to the inherent feature that SAR satellites are operated in near-polar orbits. In the usual case, the joint utilization of multiple SAR acquisitions from different viewing directions are adopted to better express the ground deformation pattern and to better constrain the earthquake source modelling; however, it has a drawback: the majority of SAR data are generally produced in the right-looking mode. It should be also noted that large uncertainties might be induced in such a strategy when the investigated objects are the strike-slip faults in nearly N-S direction and dip-slip faults in nearly E-W direction [7].
With the rapidly-improving SAR observation system, some satellite missions have the ability to acquire SAR images in the left-looking mode, such as ECHO, EVINSAR, RADARSAT-2, and recently, COSMO-SkyMed, and PALSAR-2. The left-looking mode provides a greatly different geometry compared with the right-looking SAR. Thus, it is considered as the important complementary data resource for investigations of coseismic deformation and faulting. Many experiments have been conducted in previous studies to retrieve 3D displacements based on the combination of right- and left-looking acquisitions [7,8]. It is evidenced that the joint utilization of both right- and left-looking interferograms can significantly reduce the error of the N-S displacement component [7,8].
Earthquake source parameters have been widely solved with the constraints of InSAR ground measurements based on the elastic dislocation theory. However, little research has shown the investigation of how the left-looking observations perform in the geodetic modelling, which can mainly be attributed to the reason that the left-looking SAR data are seldom. Luckily, after the occurrence of the 2016 Kumamoto earthquake in Japan, the ALOS-2 satellite immediately captured the L-band PALSAR-2 images in both left- and right-looking modes for an emergency response to this devastating event, which provides sufficient data for measuring the coseismic deformation and estimating the source model, giving an opportunity to explore the effect of introducing the unusual left-looking data.
On 16 April 2016 (Japan Standard Time, JST), a moment magnitude (Mw) 7.0 earthquake struck the Kumamoto and Oita prefectures of central Kyushu Island, southwestern Japan [9,10,11], following two foreshocks of Mw 6.2 and Mw 6.0 events, all of which are collectively referred to as the 2016 Kumamoto earthquake. The 2016 shaking is unprecedented because no historic earthquake with a magnitude larger than Mw 6.5 has been recorded around the Futagawa-Hinagu fault zone. It resulted in 3082 casualties (death 273, serious injures 1178, minor injuries 1605) and caused widespread damage to buildings (https://www.fdma.go.jp/disaster/info/items/kumamoto.pdf, accessed on 10 January 2021). The earthquake sequence occurred on the active Futagawa-Hinagu fault system, known as the western part of the Median Tectonic Line (MTL), which is driven both by the E-W compression from the subducting Philippine Sea plate and overriding Eurasia plate towards the northwest with a velocity of 50 mm/year and by the N-S extension of Central Kyushu rift with some modifications due to shear zones from MTL [12,13,14,15].
The Hinagu fault is mainly composed of the Yatsushiro Sea segment, the Hinagu segment, and the Takano-Shirahata segment, while the adjacent Futagawa fault is composed of the north coast of the Uto Peninsula segment, the Uto segment, and the Futagawa segment (Figure 1). These fault segments are defined by the Earthquake Research Committee and Headquarters for Earthquake Research Promotion [16]. The Futagawa fault traces from east-northeast to west-southwest, while the Hinagu fault traces from north-northeast to south-southwest and merges with the Futagawa segment near its northern tip. Geological and geodetic surveys show that, during the 2016 Kumamoto earthquake sequence, the fault rupture initiated from the Takano-Shirahata segment of the Hinagu fault and then propagated toward the northeast along the Futagawa segment of Futagawa fault and ended in the east bank of the Shirakawa barranca where the fault intersected with the Aso caldera rim [17,18]. The 2016 Kumamoto earthquake ruptured the Futagawa-Hinagu fault with a predominant right-lateral strike slip [19,20,21].

Figure 1.
Location map of the 2016 Kumamoto earthquake. Beach balls in blue indicate the source mechanisms of the mainshock solved by the United States Geological Survey (USGS, available at https://earthquake.usgs.gov, accessed on 12 May 2021) and Japan Meteorological Agency (JMA, available at http://www.data.jma.go.jp/svd/eqev/data/mech/cmt/cmt201604.html, accessed on 12 May 2021). Beach balls in orange indicate the source mechanisms of the two foreshocks. Gray solid circles represent the epicenters of aftershocks with magnitudes larger than 4.0. Red lines denote surface traces of the Futagawa and Hinagu faults [16,22]. Purple, blue, and black dotted rectangles indicate the ground coverage of used SAR images. The black triangle indicates the Aso caldera.
In this study, the coseismic surface deformation of the 2016 Kumamoto earthquake is mapped using the InSAR technique from three tracks of ALOS-2/PALSAR-2 SAR images in the Strip-map model. Meanwhile, we utilize the pixel offset-tracking (PO) technique to obtain the ground deformation along the SAR azimuth and range directions. The observations from offset-tracking are then used to extract reliable fault rupture traces and to recognize initial values for some of the fault geometry parameters (e.g., strike, location, length). After the interpretation of the measured deformation fields, a complicated four-segment fault system is constructed to explain the coseismic fault rupture of this event. To explore the capability of the left-looking data in geodetic inversion, qualitative and quantitative comparisons between the slip model under the constraints of the right-looking only data and the model from the joint utilization of right- and left-looking data are conducted. Finally, we estimated the coseismic fault slip distribution constrained by the combined deformation observations from three InSAR tracks (ascending and descending right-looking and descending left-looking). The discussion on the source mechanism and assessment for the earthquake model are addressed.
2. Datasets and Processing
2.1. Coseismic InSAR Deformation
The Japan Aerospace Exploration Agency (JAXA) provides vast scenes of SAR images produced by the PALSAR-2 sensor on the ALOS-2 satellite, including common ascending/descending right-looking acquisitions and rare ascending/descending left-looking data. The long-wavelength (L-band) SAR observations have the advantage of overcoming the interferometric decorrelation by the rugged Kyushu topography for obtaining quality deformation observations. For the 2016 Kumamoto earthquake, the available SAR data are superabundant; thus, the selection of the SAR images is crucial. Although the study by Fukahata and Hashimoto [19] shows that the faulting mechanism can be estimated from the ScanSAR data, but the residual in their solution is kind of large. We would like to choose the images in the Strip-map mode (~3 m) because it has much superior spatial resolution than the ScanSAR data (~100 m). We first picked the pair of descending right-looking (DR) data (track T23), which covers almost entirely the seismic zone of the 2016 Kumamoto earthquake. As for ascending right-looking (AR) images, we chose the track T131 because it can better reveal the deformation pattern compared with track T130. Additionally, then, the descending left-looking (DL) pair (track T29) was also collected, which has the equivalent resolution and covers a similar seismically-affected zone with the AR pair. The ground coverage of our used PALSAR-2 acquisitions is shown in Figure 1, and the detailed parameters of these images are listed in Table 1.

Table 1.
Interferometric parameters of the ALOS-2 left- and right-looking images used in this study.
We processed the collected ALOS-2/PALSAR-2 acquisitions by the GAMMA software based on the two-pass differential interferometry method [23]. The three tracks SAR images share the same spatial resolution of 1.43 m in range. Additionally, the resolutions in azimuth of the DR, AR, and DL tracks are, respectively, 2.12 m, 1.87 m, and 1.85 m. Hence, the multilook factors were set as 15 (in range direction) × 17 (in azimuth direction) to make the ground range and azimuth pixel spacing change into approximately 30 m × 30 m, which maintains a quality interferometric coherence. The Global Digital Surface Model ALOS World 3D-30m (AW3D30) with 30 m resolution (provided by AW3D of the JAXA, available at https://www.eorc.jaxa.jp/ALOS/en/aw3d30/data/index.htm, accessed on 12 May 2021) was used to model the topographic phase contribution and to remove it from the original InSAR interferograms. The minimum-cost-flow (MCF) method provided by the GAMMA package was then utilized to unwrap the differential interferograms. Furthermore, we applied a bilinear algorithm to simulate and mitigate the orbital errors based on the far-field observations with high coherence [24], and the derived coseismic surface deformation fields in the LOS directions are shown in Figure 2a–c.

Figure 2.
Coseismic surface deformation of the 2016 Kumamoto earthquake. Descending (a) and ascending (b) right-looking InSAR LOS surface deformation maps from PALSAR-2 images (d) and (e) the corresponding pixels after the quadtree down-sampling, respectively. Descending left-looking (c) and subsampled (f) InSAR coseismic deformation from DL track T29. Positive/negative values indicate the movement towards/away from the sensor along the line of sight.
Figure 2a shows the measured coseismic deformation in the LOS direction from the DR observations, which is characterized by four deformation lobes from southwest to northeast. The motion of lobe A1 marked by the black ellipse is the movement towards the satellite by ~0.2 m, which has a similar magnitude to lobe A3. Lobes A2 and A4 are contributed by the movement away from the satellite with an average magnitude of ~0.4 m. The maximum displacement away from the satellite reaches 1 m at ~15 km northeast of the epicenter, which is relatively larger than the peak movement of 0.41 m towards the satellite.
The AR InSAR ground deformation field with three significant deformation zones is shown in Figure 2b. The motion in the B1 zone is dominated by the movement away from the satellite with an average magnitude of ~0.4 m. A significant average displacement of ~1.1 m away from the satellite is detected in the B2 zone, and the maximum reaches up to 2.0 m. Oppositely, the pixels averagely move towards the satellite by ~0.5 m in the B3 zone, and the largest displacement is 0.77 m.
The surface displacements measured by the DL track are shown in Figure 2c. The pixels in zones C1, C2, and C3 have the same change trend (increase or decrease) of slant distance with the corresponding zones B1, B2, and B3 in Figure 2b, but with relatively smaller average magnitudes (0.3 m for C1, 0.8 m for C2, and 0.3 m for C3). The maximum displacement in the DL deformation field of Figure 2c towards the satellite is 0.59 m, and the peak motion away from the satellite is 1.8 m. It should be noted that the time baseline of the DL interferometry pair (461 days) is relatively larger than the right-looking DR (56 days) and AR (28 days) pairs due to the rareness of the left-looking imaging mode, which may cause the temporal decorrelation. Luckily, the used ALOS2/PALSAR-2 SAR images acquired by the L-band satellite are beneficial to relieve the temporal decorrelation. Although some pixels in the main seismic zone (marked by C2) have been removed due to the decorrelation, there are still vast quality observations remained.
Both AR and DL observations show slant-range extension in the northwest of the Futagawa-Hinagu fault system and slant-range shortening in the southeast. Oppositely, the slant-range extension is detected at the southeast flank of the faults in the DR deformation field. Additionally, the majority of pixels at the northwest flank of the faults show decreased slant distances in Figure 2a, except lobe A2. The features of the mapped ground deformation evidence that the 2016 Kumamoto earthquake sequence is mainly induced by the right-lateral strike-slip motion of the Futagawa-Hinagu fault system. Moreover, the same characteristic of the slant-range extension within lobes A2 of the DR track, B2 of the AR track, and C2 of the DL track suggests that normal faulting should also exist.
2.2. Pixel Offset-Tracking Data
It can be seen from Figure 2 that InSAR data are missing in the near-fault zone due to severe ground deformation. The pixel offset-tracking (PO) technique can be utilized to extract the coseismic surface deformation along the SAR azimuth and range directions [25,26], which can provide reliable signals when the near-fault deformation gradient is large [27]. Previous studies indicate that the accuracy of the offsets is typically on the order of 1/10th of a pixel [28,29]. Based on the resolution in azimuth of the used images (~2 m), it can be determined that the accuracy of azimuth offset is ~20 cm. The far-field InSAR measurements are mainly contributed by the atmospheric delay error and random noise, which can be considered as the uncertainty of the InSAR data. We removed the near-field deformation signals that were caused by the earthquake and calculated the absolute mean of the far-field deformation, deriving the InSAR uncertainty of ~1.1 cm. The precision of PO measurements is much poorer than InSAR; hence, the displacements derived by the PO method are only used to identify the fault surface trace, not introduced into the geodetic modeling.
The searching window size is set as 128 × 128 pixels, quite larger than the set window size of 32 × 64 pixels in the study by Himematsu and Furuya [20]. A larger window size helps improve the precision of the extracted deformation, but at the expense of time [30]. The other critical parameter is the oversampling factor, and the typical number of 64 is chosen in this study [29,30]. Additionally, the sampling interval is set as 23 (azimuth) × 20 (range) pixels, equivalent to the ground range and azimuth pixel spacing of approximately 40 m × 40 m. The derived surface deformation fields are mapped in Figure 3.
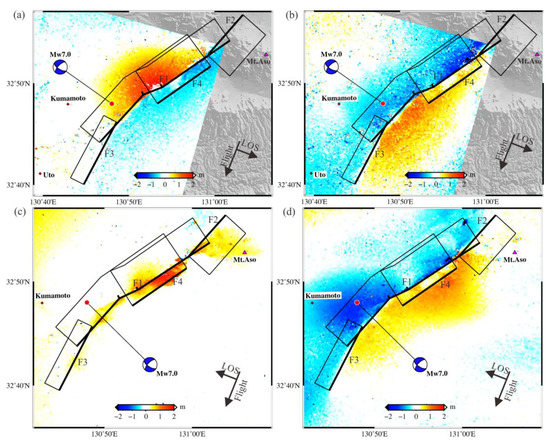
Figure 3.
Surface deformation in the azimuth/range directions measured by the PO technique from ALOS-2 images. Ground deformation along the slant-range (a) and azimuth (b) directions from the DL track. Displacements along the slant-range (c) and azimuth (d) from DR data. Rectangles indicate the constructed faults projected onto the ground. Bold lines indicate the surface traces of the related faults.
Focusing on the deformation along the azimuth (Figure 3b,d), pixels at the northwest side of the fault surface trace (hanging wall) deform towards the approximate north direction (i.e., the opposite direction to the satellite flight) with a deformation maximum of ~2.0 m, colored by the deep blue. The fault footwall signals at the southeast side of the fault surface trace deform towards the approximate south direction (i.e., flight direction) with a peak displacement of ~2 m, colored by the reddish-yellow. The observed surface deformation is good evidence for the coseismic dextral strike-slip faulting pattern.
Clear displacement discontinuities between the fault footwall and hanging wall can be recognized from the deformation fields mapped in Figure 3, which provides great help to extract the fault surface traces of the 2016 Kumamoto earthquake. The largest discontinuity denoted by F1 probably corresponds to the part of the Futagawa fault due to the interpretation of PO deformation distribution and previous geologic survey. Additionally, the F1 is divided into three segments according to the deformation discontinuity trail. In the northwest of the Aso caldera, the discontinuity named F2 is detected. The southwest discontinuity denoted by F3 should be related to the Hinagu fault. The discontinuity F4 is parallel to the northeast segment of F1, ~2 km away from F1. Reliable fault traces are recognized based on the PO observations from DR and DL tracks. The used AR and DL images cover almost the same seismically-affected zone. Additionally, the spatial resolutions of the two tracks are similar. Hence, it is worth noting that the PO measurements from the AR track will not provide additional findings and will not contribute to an improvement to the geodetic inversion; hence, the PO measurements from the AR track are not shown in this study.
3. Method of Geodetic Modelling
Each InSAR coseismic surface deformation field shown in Figure 2 consists of a total number of about 0.6 million data points. Considering the computing load and inversion convenience for the slip model, the dense deformation data are down-sampled using a two-dimensional quantization algorithm known as quadtree [31]. The observations with interferometric coherence less than 0.3 are removed to enhance the quality of deformation data. At last, 1765 (DR track), 1733 (AR track), and 1709 (DL track) samples are remained, which are inverted for the estimation of fault geometry and slip distribution associated with the 2016 Kumamoto earthquake.
The extracted strike angles from PO deformation for the three segments (from northeast to southwest) of F1 are 235°, 245°, and 225°, respectively. Additionally, the strikes of 205° and 235° are estimated for the F3 and F4. In consideration of the fact that significant displacements are measured around the Aso caldera (seen in Figure 2a and Figure 4c) at the southeast flank of the F2, and together with the slip model by Ozawa et al. [32], the F2 is suggested to dip southeast. Thus, the extracted strike angle for F2 is 45°. These derived strikes are used as the initial input for further fault optimization, along with other original parameters (dip 66° and rake −152° for three segments of F1, dip 62° and rake −178° for F2, dip 72° and rake −176° for F3, and dip 66° and rake −152° for F4) from USGS [33] and Geospatial Information Authority of Japan [17].

Figure 4.
Fault slip models of the Kumamoto earthquake constrained by different ground deformation date sets. (a) Coseismic slip distribution solved by the right-looking only data of AR–DR. (b) Coseismic faulting model derived from the joint constraints of the right- and left-looking data of DR–DL. Black dotted rectangles denote the high slip concentrations on F1. Arrow vector indicates the direction and magnitude of the slip on each sub-fault patch.
The geodetic inversion is carried out using the proposed method by Yang et al. [5], which is based on the elastic dislocation model [34]. The widths are set as 12 km for the F1 and 10 km for the other three faults. The lengths for the three segments of F1 are 15 km, 4 km, and 12 km, and the lengths of 10 km, 13 km, and 12 km are, respectively, set for F2, F3, and F4. The top depths of all segments are set to be surface. The searching intervals of (230°, 240°), (240°, 250°), and (220°, 230°) are set for the strike angles of three F1 segments, and (35°, 55°) and (200°, 210°) for F2 and F3. It should be noted that the strike angle of F4 does not need to search, as it is set to be equal to the northeast segment of F1. All fault segments share the same dip angle interval of [30°, 90°] and rake angle of [−90°, −180°].
We discretize all fault planes with a size of 4 km × 4 km and estimate the optimal fault geometry parameters under the constraints of the derived InSAR observations. We apply the simulated annealing algorithm in searching for the fault geometry until a set of optimum parameters are recognized with a globally minimized misfit between the InSAR observed and modeled deformation. To avoid unrealistic-large slip gradients between adjacent fault patches, the Laplace smoothing constraint is introduced into the inversion. The details of the smoothing factor estimation and mathematical formula of geodetic data inversion based on elastic half-space dislocation theory can be found in our previous studies [5,26,35,36]. It should be noted that we assume Poisson’s ratio of 0.25 and shear modulus of 30.0 GPa.
4. Results
We conduct the above process of optimum fault geometry searching repeatedly with different deformation data sets. First, the subsampled AR and DR InSAR displacements from images in general right-looking mode are introduced as the constraint data. Then, the combined data set (DR–DL) of usual right-looking and unusual left-looking data are tested. Finally, the fault geometry model is estimated under the joint constraints of the three-tracks data (AR–DR–DL). The derived different geometry models of the multi-segment fault system are listed in Table 2. For each data set, the searching process is repeated 100 times with random initial values within the searching intervals and random subsets of 90 percent of the subsampled InSAR data, thus deriving the error of each parameter estimate, as shown in Table 2.
Table 2.
Fault parameters of the 2016 Kumamoto earthquake solved by different data sets.
It can be seen that the three solutions are generally alike. For the Futagawa fault (F1), the best fitting strike angles for three segments (from northeast to southwest) are respectively within the intervals of (235.6°, 237.5°), (243.4°, 247.1°), and (220.6°, 223.6°), and the derived dip and rake angles are within (68.8°, 71.8°) and (−171.4°, −167.0°). As for F2, the estimated strike, dip and rake angles are within (39.1°, 41.0°), (58.9°, 62.2°), and (−134.7°, −128.9°), respectively. It is shown that the Hinagu fault (F3) has the largest dip angle among the four faults, which is within the interval of (73.6°, 77.4°), and F4 shows the shallowest dip angle within (45.9°, 46.6°). Focusing on the AR–DR and DR–DL fault models, we can derive the difference (absolute value) in each geometry parameter between the two models through easy subtraction. Additionally, the largest degree differences in strike, dip and rake are 3.0°, 3.8°, and 5.8° respectively, which is acceptable in consideration of reasonable errors in the InSAR interferometry process and different signal-to-noise ratios in different data sets.
The accuracies of the derived three-track LOS deformation fields from SAR pairs acquired by the same satellite in the same imaging model are similar (~1.1 cm). Based on the satellite geometry parameters (Table 1), the LOS displacements of the AR track T131 can be expressed as , and that of DL track T29 is . Considering the characteristics of the shown 3D GPS displacements in previous studies [33,37], it can be inferred that the near-field displacements measured by AR and DL tracks are different but very similar. Hence, the accuracies of the fault parameters from AR–DR and DR–DL data might be similar, in accord with the result (Table 2) of our contrast experiment. It is evidenced that the use of left-looking InSAR works well in fault geometry modelling, similar to the right-looking InSAR. Moreover, the accuracies of fault parameters in the AR–DR–DL solution resemble those of the AR–DR and DR–DL solutions due to the measured AR and DL InSAR data have a high correlation. The increase of the highly related constraints will not significantly affect the uncertainty of the geometry parameters.
After the determination of the best-fitting fault geometry parameters, we can re-discretize the faults with a smaller size of 1 km × 1 km and can estimate the detailed coseismic slip distribution of the 2016 Kumamoto earthquake constrained by the InSAR measurements. The unusual left-looking images are introduced into the investigation of the 2016 Kumamoto earthquake. The above comparison of the derived fault geometry parameters suggests that left-looking InSAR has similar behavior to the right-looking InSAR in fault geometry modelling. Then, we would like to explore the performance of the left-looking data in geodetic inversion for the faulting model. Hence, we estimate the slip models (Figure 4) of the Kumamoto earthquake under the constraints of the right-looking only AR–DR data and the combination of right- and left-looking DR–DL data respectively, with the fixed fault parameters in the AR–DR solution (DR–DL solution is equivalent). Each InSAR track is set to equal weight, due to the same imaging mode and similar processing. Additionally, we compare the derived two faulting models in qualitative and quantitative ways.
First, the reliabilities of the estimated slip models should be certified. Thus, we forward calculate the surface displacements in the InSAR LOS direction based on the derived faulting models, as shown in Figure 5a–c and Figure 6a–c. It is shown that both deformation simulations from AR–DR and DR–DL data sets agree well with the InSAR observations (Figure 2a–c). Only a few significant residuals are found in the near-fault regions. It should be noted that the notable residuals located at ~10 km NW of the Aso volcano are mainly caused by the disturbance of several small active faults around this region [38]. The predictions and residuals in the two solutions are very similar. To better show the difference in residual, the magnified diagrams of the marked rectangle regions are shown in Figure 5g–i and Figure 6g–i. In the marked region (g), the residuals in the AR–DR solution are greater than those of the DR–DL solution. However, in regions (h) and (i), residuals are more significant in the DR–DL solution.
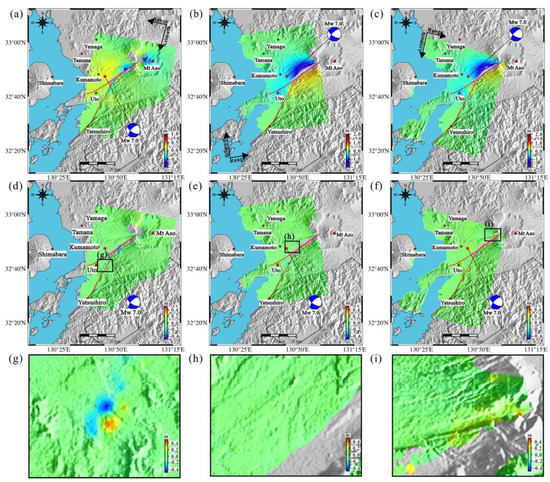
Figure 5.
Coseismic surface deformation in InSAR LOS direction predicted from the AR–DR slip model. (a–c) are, respectively, the simulated DR, AR, and DL InSAR deformation, and (d–f) are the corresponding residuals between the observed and modeled ones. (g–i) are the magnified diagrams of the marked rectangle regions in (d–f).

Figure 6.
Similar to Figure 5 but for DR–DL solution.
It can be clearly seen from Figure 4 that this seismic event is mainly dominated by the dextral strike-slip motion of the seismogenic faults and with some normal faulting. Focusing on the F1 along the Futagawa fault, we can easily see that the slip distribution on the F1 fault from AR–DR data (Figure 4a) is in good agreement with the one from DR–DL data (Figure 4b), both of which include two significant slip asperities. The slip on each F1 sub-fault patch solved from AR–DR data has a similar movement direction and slip magnitude with the one shown in the corresponding patch of Figure 4b from the DR–DL observations. The average slip magnitude of region S-1 in the AR–DR solution is 2.89 m, slightly smaller than the average 2.91 m of the slip asperity S-1 in the DR–DL model. The average slip magnitude of the AR–DR S-2 is larger than the DR–DL S-2, and the magnitudes are 3.89 m and 3.44 m, respectively. The bottom depths of the main slip zones S-1 and S-2 are both ~8.5 km in the AR–DR model, 1 km deeper than the DR–DL result. Moreover, the peak slip of AR–DR F1 is 5.19 m, larger than the maximum of 4.77 m for DR–DL F1. The distribution of slip difference on the F1 is shown in Figure 7a. It can be seen that the negative slip differences mainly concentrate at depths of 0–6 km and at distances of 6–18 km along the strike on the F1, with an average of −0.48 m. However, the positive slip differences are located at along-strike distances of 5–24 km and at relatively deeper depths of 6–11 km, with an average of 0.73 m. The maxima of the negative/positive slip differences between the AR–DR and DR–DL solutions are, respectively, −0.85 m and 1.16 m.

Figure 7.
Comparison of the derived two slip models, respectively, solved by the AR–DR and DR–DL InSAR observations (slip in the AR–DR model minus slip in the DR–DL model). The subgraphs show the spatial distribution of the differences on the estimated faults.
The fault slip on AR–DR F2 has a wonderful consistency with the DR–DL F2, and no notable difference can be recognized visually from Figure 4. The differences shown in Figure 7b between the two estimated models are small. The largest slip difference (absolute value) is less than 0.3 m. On the F3, the slip vectors on the majority of the sub-fault patches on the F3 in the two solutions (Figure 4) are alike. The average slip of the main-slip zone on AR–DR F3 is 3.12 m, slightly larger than the average of 2.96 m of the DR–DL model. The most significant distinction is located at depths of 0–5 km and along-strike distances of 3–5 km from the SW end of the seismogenic fault, where the thrust component is more striking in the AR–DR model. Figure 7c shows that the average slip difference in this region is 0.61 m.
As for the fourth fault F4, the two faulting models are generally consistent. However, it can be seen from Figure 4 that the scope and magnitude of the main-slip asperity on F4 in the AR–DR model are bigger than the DR–DL result. It should be noted that the AR–DR model poses a more significant slip on the shallowest portion of the fault. Additionally, the top depth of the main-slip zone of AR–DR F4 is ~2 km, while it is ~3 km for the DR–DL solution. One difference concentration with an average of 0.72 m can be found in Figure 7d.
In spite of the differences in the two faulting models, the fault slip model from AR–DR measurements generally coincides with the model from DR–DL data, no matter in aspects of magnitude, direction, location, and depth. Hence, the result of the contrast experiment has evidenced that left-looking InSAR data can provide comparable constraints for coseismic slip modelling to right-looking InSAR.
After we testified the availability of the left-looking data, we think that the addition of the descending left-looking data could help in deriving the faulting mechanism of the Kumamoto earthquake because the left- and right-looking data could complement each other. Both of them have their own drawbacks. Due to the rareness of the left-looking images, the time baseline of the DL interferometry pair (461 days) is larger than the AR pair (28 days), which may cause temporal decorrelation. Additionally, Table 1 shows that the secondary SAR image of the AR interferometry pair is acquired on April 26, 6 days after the secondary image of the DL track; thus, it might contain more effects caused by afterslip and aftershocks than the DL track. Therefore, we estimate the finite faulting model of the Kumamoto earthquake under the joint constraints of the three tracks data (AR–DR–DL), and the result is shown in Figure 8a.

Figure 8.
Fault slip model (a) of the Kumamoto earthquake estimated by the joint utilization of ground observations from three-track InSAR and the corresponding error distributions (b) on the fault planes. Dotted rectangles denote the high slip concentrations.
First, to assess the reliability of the estimated fault slip model jointly constrained by three-track InSAR data (DR-AR-DL), the surface displacements in the LOS direction are forward calculated from the estimated faulting model, as shown in Figure 9a–c. It can be seen that the predicted displacements agree well with the InSAR observations (Figure 2a–c) in both the spatial distribution and motion magnitude. The residuals (Figure 9d–f) are trivial in most of the regions.
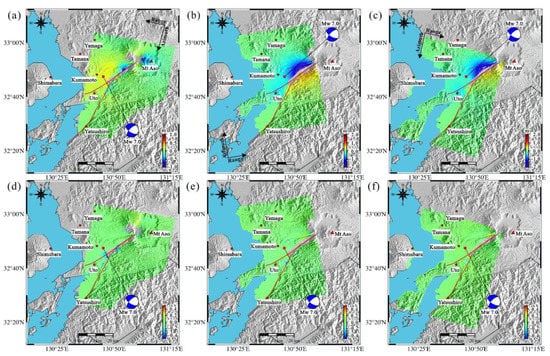
Figure 9.
Prediction of coseismic surface deformation in InSAR LOS direction. (a–c) are respectively the modeled DR, AR, and DL InSAR deformation from the estimated slip model. (d–f) are the corresponding residuals between the observed and modeled displacements.
The fault rupture extends from southwest to northeast with a total length of ~55 km, and the main slip concentrates on the F1 fault plane along the Futagawa fault, where the peak slip reaches up to 4.96 m. The rupture pattern of F1 is a mixed mode of the right-lateral strike-slip and normal motion. A significant slip on the F1 fault segment concentrates at depths of 0–8 km within the strike distances of 4–27 km, with varying slip magnitudes of 2.0–4.96 m. The high-slip concentration (“S-2”) characterized by both strike-slip and normal motion covers about ~63 km2 and occurs mainly at depths of 0–8 km, with an average slip magnitude of 3.65 m. The minor faulting area (“S-1”) is located at depths of 0–7 km and extends from 6 km to 10 km along the strike direction, with a relatively smaller average slip of 2.98 m.
Both dextral strike-slip and normal dip-slip can be found on the F2 fault. The main-slip zone is located at depths of 2–7 km and the along-strike distances of 3–6 km, with a slip average of ~2 m. It is shown that the faulting motion on the Hinagu fault (F3) is mainly dominated by the right-lateral strike-slip rupture. The fault slip concentrates mainly at the center of the plane, at depths of 2–7.5 km and distances of 4–10 km along the strike, with an average slip of 2.87 m. A few thrust movements can be seen at depths of 0–4 km and at along-strike distances of 2–4 km from the SW fault tip. A single slip asperity can be recognized on the fault F4, which is characterized by the normal slip, together with some dextral strike-slip. The main-slip zone with an average slip of 3.2 m is located at depths of 2–7 km and along-strike distances of 5–10 km.
A total of ~722 km2 fault rupture is estimated for explaining the coseismic motion of the Kumamoto earthquake sequence. The faulting motions on the F1, F2, F3, and F4 segments release 59.6%, 7.9%, 17.7%, and 15.8% of the whole seismic moment, respectively. A total of the geodetically estimated seismic moment is 3.795 × 1019 Nm, approximately equals to a magnitude of Mw 7.0.
Additionally, the spatial distribution of the slip errors on each fault segment is depicted in Figure 8b. The slip errors on F1 concentrate at depths of 0–8 km and at distances of 9–19 km along strike with an average of ~4 cm. The ratio of the average slip magnitude (~3.16 m) to its uncertainty exceeds 79:1. The maximum slip uncertainty is less than 3 cm for F2. As for F3, significant errors only locate at the shallow crust within depths of 0–2 km, with an average of ~4.3 cm, which might be caused by the interferometric decorrelation in the near-fault region. The ratio of the average slip (~1.93 m) to its uncertainty (~4.94 cm) is larger than 39:1 for the fault F4. It suggests that the coseismic faulting is well modelled based on our used InSAR data since the slip uncertainty is extremely small in contrast to the slip magnitude on each fault.
5. Discussions
5.1. Difference in Displacements from the AR and DL InSAR
It can be seen visually from Figure 2b,c that the extracted deformation fields from AR and DL tracks are similar. However, the differences are not trivial. The difference in geometry is the important factor that causes the difference in the measured deformation. The LOS displacement DLOS of an observation target on the ground can be expressed as [24]:
where θ represents incidence angle, and α is azimuth. Based on the listed parameters of the used SAR images in Table 1, it can be determined that the LOS deformation extracted from the ascending right-looking track T131 can be expressed as , and that of the DL track can be written as . Three-dimensional GPS displacements in previous studies [32,37] suggest that although the horizontal displacements are predominately characterized by the displacements in the far-field zone, the deformation is comparable to deformation in the near-field zone. Additionally, the vertical deformation is significant in the near-field zone. Hence, the extracted LOS displacements from AR and DL tracks should be similar, but theoretically different, which is in accord with our measurements. Moreover, it can be seen from Table 1 that the secondary SAR image of the AR interferometry pair is acquired on 26 April, 6 days after the secondary image of the DL track. Additionally, a significant afterslip on the Hinagu fault has been evidenced in the study by Shirahama et al. [21]. Thus, it can be inferred that the AR InSAR observations might contain more afterslip deformation than the DL track.
To better show the differences of the measurements from the two tracks, the LOS displacements from AR and DL tracks are interpolated into the same spatial scope with the same pixel spacing by the nearest neighbor algorithm. Additionally, then the differences in displacements from the AR and DL tracks are obtained (AR observations minus DL observations), as mapped in Figure 10a. In the northwest of the Futagawa-Hinagu fault, the difference in deformation of the same ground target is negative, which means the movement away from the satellite measured by the AR track is greater than that of the DL InSAR. Additionally, the positive displacement differences in the southeast of the faults indicate that the movements towards the satellite from the AR track are bigger than those of the DL track. Moreover, the statistical result of the differences in the observations from the two-track is shown in Figure 10b. It can be found that the biggest difference (absolute value) is within 0.4 m, and the median value lies close to 0 m. 72.4% of the differences (absolute value) are within 0.1 m, and less than 6.7% of the differences (absolute value) exceed 0.2 m. It should be noted that a few (0.017%) pixels show differences (absolute value) larger than 0.3 m in the near-fault zone, which may be attributed to the unwrapping error.
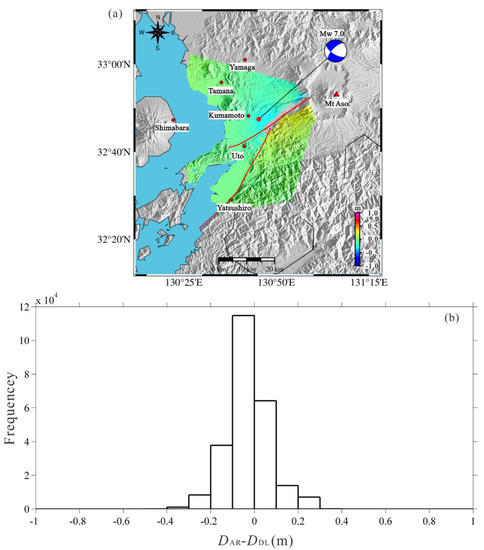
Figure 10.
Comparison of the deformation measured by AR and DL InSAR. (a) The differences in displacements measured by AR InSAR (DAR) and DL InSAR (DDL). (b) The distribution of the differences.
5.2. Optimal Faulting Mechanism Responsible for the 2016 Kumamoto Earthquake
Although the result indicates that the left-looking InSAR data can provide comparable constraints for geodetic modelling (including the estimation of both fault geometry model and slip distribution) to right-looking InSAR. However, the AR–DR and DR–DL models are definitely different. Significant slip differences between the AR–DR and DR–DL models on the F1 and F4 might be attributed to the lack of observations in the most-deformed zone of the DL track. Figure 2c,f shows that some pixels in the main seismic zone (marked by C2) of the deformation field measured by DL InSAR have been removed due to the interferometry decorrelation, especially the region with the most deformed targets (colored by purple). Additionally, it can be seen in Figure 3 that the F1 and F4 are around this region. In the study by Shirahama et al. [21], it is evidenced that a significant afterslip has occurred on the Hinagu fault (namely F3). Considering the time baselines of the two interferometry pairs, it can be inferred that the AR InSAR observations contain more deformations contributed by the afterslip than the DL measurements. Hence, the differences in F3 might be caused by the afterslip.
Multiple affecting factors, such as the inherent characteristic of InSAR data that the measured displacements are the mixed signals contributed by the mainshock, foreshocks, and aftershocks within the time baseline, phase unwrapping error, atmospheric delay, interferometry decorrelation, etc., could result in the differences in slip models estimated from different data sets. Thus, we believe that the utilization of left-looking InSAR in the geodetic inversion can help us derive an optimal source model with limited SAR images, considering that both of the right- and left-looking InSAR might have drawbacks due to the long revisiting period of SAR satellite and multiple InSAR from different viewing directions could complement each other. We think the optimal coseismic faulting model for the 2016 Kumamoto earthquake is estimated under the joint constraints of the three tracks data (AR–DR–DL), as shown in Figure 8.
Focusing on the AR–DR–DL solution, the derived rupture pattern of F1 is a mixed mode of the right-lateral strike-slip and normal motion, in agreement with almost all published studies [9,10,19,20,39]. The peak slip (4.96 m) on the F1 approximates the one from the model by Fukahata et al. [19] but relatively smaller than the maxima that near/exceed 6 m from the results by Asano et al. [9], Himematsu et al. [20], and Uchide et al. [39] and relatively bigger than the slip maximum of 4 m from the solution by Kubo et al. [10]. The ruptures on fault F1 mainly occur on patches above 10 km, which is consistent with the InSAR-derived results by Fukahata et al. [19] and Himematsu et al. [20], but shallower than the estimated slip models from strong motion data [9,10]. The southeast dipping fault F2 in our model is constructed due to the surface trace extracted from PO deformation and the interpretation of the DR InSAR LOS deformation, which is not considered in previous studies. The study by Ozawa et al. [32] also shows a fault with dip direction of southeast, but their fault is assumed as a plane with uniform-slip. As for the Hinagu fault (F3), the estimated thrust component is in agreement with the model by Asano et al. 2016. Moreover, according to the study on the revelation of the rupture properties of the 2016 Kumamoto earthquake foreshocks [40], it suggests that two large foreshocks with magnitudes larger than M 6.0 mainly contribute to the ruptures of the Hinagu fault and south tip of the Futagawa fault. The thrust component is also shown on their constructed fault plane along the Hinagu fault. Our used three InSAR pairs all include the effect of the two foreshocks. Thus, the estimated thrust motion on the Hinagu fault in our model is reasonable. The magnitude and depth of the derived main-slip on F4 have consistency with the model by Himematsu et al. [20], but only a normal slip component is found in Himematsu’s result. The faulting directions of the majority patches in our slip model are similar to the sole slip direction given by the study that is under the assumption of a uniformly-slip model [32].
It can be seen that the fault ruptures on all fault segments reach the surface that can probably lead to severe ground deformation, which well explains the near-fault decorrelation due to steep deformation gradients in the InSAR deformation fields and coincides with the fact that clear fault surface traces can be extracted from the PO deformation fields. The same rupture feature can be recognized from the results in previous studies [9,10,19,20]. Additionally, our predicted displacements (Figure 9a–c) agree well with the InSAR observations (Figure 2a–c) in both the spatial distribution and motion magnitude. A few significant errors can be found in the near-fault region, which could be attributed to the joint contribution of phase unwrapping error, atmospheric delay, and uncertainty of fault geometry. A striking residual concentration can be seen at ~10 km NW of the Aso caldera. Despite the above influence factors, the residuals within this region could mainly be caused by the neglect of the slip on several small active faults around this region. The quantitative statistics show that the modeling misfits (namely RMSE) between the predicted and observed displacements are, respectively, as small as 3.3 cm, 3.2 cm, and 3.6 cm for the DR, AR, and DL tracks, explaining 98.2%, 99.7%, and 99.4% of the observations, respectively. In comparison with the previous model with misfits of 3.6 cm to 5.0 cm [32], the model accuracy is improved more than 15% due to the more complicated four-segment fault geometry with non-uniform slip constructed by us.
6. Conclusions
In this study, three-track ALOS-2/PALSAR-2 SAR acquisitions (ascending and descending right-looking and descending left-looking) are jointly employed to map the surface deformation and estimate the coseismic faulting of the Kumamoto earthquake. The productions from the InSAR technique suggest that the descending left-looking InSAR deformation pattern presents a high consistency with the ascending right-looking track. Several clear displacement discontinuities have been recognized from deformation fields measured by the PO technique. A complex fault system including four segments is constructed to estimate the slip model of the seismicity, among which the dip direction of one fault segment (southeast dipping) is opposite to the other three segments (northwest dipping). The fault slip distribution in the AR–DR solution generally coincides with the model from DR–DL data in aspects of magnitude, direction, location, and depth, which evidences that left-looking InSAR can not only map the coseismic surface deformation caused by earthquakes but also provide comparable constraints for geodetic modelling of coseismic faulting to right-looking observations.
The faulting model jointly estimated by three-track InSAR measurements suggests that the seismic events are dominated by the dextral strike-slip motion mixed with some normal dip-slip movements. The fault rupture propagated from southwest to northeast with a length of ~55 km on the Futagawa-Hinagu fault zone, and the main faulting concentrated on the Futagawa fault, which released more than half of the whole seismic moment, with a slip maximum up to 4.96 m. The faulting pattern of the northeast fault segment with a southeast dip direction is a mixed mode of predominant right-lateral strike-slip, together with some normal motion. Additionally, the main-slip zone is located at depths of 2–7 km and at along-strike distances of 3–6 km, with an average slip of ~2 m. The slip on the majority of the patches of the Hinagu fault is shown as the right-lateral strike-slip, and a few reasonable thrust components can be found in the southwest segment of the seismogenic fault. The fault parallel to the NE segment of the Futagawa fault is mainly dominated by the normal slip, mixed with some dextral strike-slip. The total geodetically estimated seismic moment for the Kumamoto earthquake sequence is about 3.795 × 1019 Nm, approximately equal to Mw 7.0.
The left-looking SAR has been evidenced that it can well complement the right-looking SAR both in-ground deformation measuring and source model estimating, and can further significantly improve our ability of emergency response of the geologic hazard.
Author Contributions
Conceptualization, Y.-H.Y. and Q.C.; methodology and software, Y.-H.Y. and Q.X.; validation, L.X. and J.-J.Z.; resources, Y.-H.Y., J.-C.H. and Q.C.; writing-original draft preparation, Y.-H.Y. and Q.X.; writing-review and editing, J.-J.Z. and L.X.; visualization, Q.X., J.-J.Z. and H.-L.L.; supervision, Q.C.; funding acquisition, Q.C. and Y.-H.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the Hebei Key Laboratory of Earthquake Dynamics (FZ212102), the Applied Basic Research Program of Science and Technology Department of Sichuan Province (2020YJ0116), the Open Funding Project of State Key Laboratory of Geohazard Prevention and Geoenvironment Protection (SKLGP2020K019), National Key Research and Development Pro-gram of China (Grant No. 2017YFB0502700), and the Fund for Creative Research Groups of China (41521002).
Data Availability Statement
The generated datasets, including the left- and right-looking coseismic InSAR deformation fields and the InSAR-derived faulting model, are available from the corresponding author on reasonable request. The original PALSAR-2 images can be acquired on the website of the JAXA (Japan Aerospace Exploration Agency).
Acknowledgments
We appreciate the encouraging and constructive suggestions from editors and reviewers for significantly improving the manuscript The ALOS-2 SAR images were provided by the Japan Aerospace Exploration Agency (JAXA) under the 2nd Earth Observation Research Project (PI No. ER2A2N136). Most of figures were plotted with Generic Mapping Tool (GMT) software provided by Wessel and Smith (1998).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, Q.; Xu, Q.; Zhang, Y.J.; Yang, Y.H.; Yong, Q.; Liu, G.X. Sequential combination of multi-source satellite observations for separation of surface deformation associated with serial seismic events. Int. J. Appl. Earth Obs. Geoinf. 2018, 65, 57–70. [Google Scholar] [CrossRef]
- Massonnet, D.; Rossi, M.; Carmona, C. The displacement filed of the landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Tong, X.P.; Sandwell, D.T.; Yuri, F. Coseismic slip model of the 2008 Wenchuan earthquake derived from joint inversion of interferometric synthetic aperture radar, GPS, and feld data. J. Geophys. Res. Solid Earth 2010, 115, B04314. [Google Scholar] [CrossRef]
- Wright, T.J.; Parsons, B.; England, P.C.; Fielding, E.J. InSAR observations of low slip rates on the major faults of western Tibet. Science 2004, 305, 236–239. [Google Scholar] [CrossRef]
- Yang, Y.H.; Tsai, M.C.; Hu, J.C.; Aurelio, M.A.; Hashimoto, M.; Escudero, J.A.P.; Su, Z.; Chen, Q. Coseismic slip deficit of the 2017 Mw 6.5 Ormoc Earthquake that occurred along a creeping segment and geothermal field of the Philippine Fault. Geophys. Res. Lett. 2018, 45, 2659–2668. [Google Scholar] [CrossRef]
- Alatza, S.; Papoutsis, I.; Paradissis, D.; Kontoes, C.; Papadopoulos, G.A. Multi-Temporal InSAR Analysis for Monitoring Ground Deformation in Amorgos Island, Greece. Sensors 2020, 20, 338. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Li, Z.W.; Ding, X.L.; Zhu, J.J.; Zhang, L.; Sun, Q. Resolving three-dimensional surface displacements from InSAR measurements: A review. Earth Sci. Rev. 2014, 133, 1–17. [Google Scholar] [CrossRef]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, L01607. [Google Scholar] [CrossRef]
- Asano, K.; Iwata, T. Source rupture processes of the foreshock and mainshock in the 2016 Kumamoto earthquake sequence estimated from the kinematic waveform inversion of strong motion data. Earth Planets Space 2016, 68, 147. [Google Scholar] [CrossRef]
- Kubo, H.; Suzuki, W.; Aoi, S.; Sekiguchi, H. Source rupture processes of the 2016 Kumamoto, Japan, earthquakes estimated from strong-motion waveforms. Earth Planets Space 2016, 68, 161. [Google Scholar] [CrossRef]
- Nanjo, K.Z.; Izutsu, J.; Orihara, Y.; Furuse, N.; Togo, S.; Nitta, H.; Okada, T.; Tanaka, R.; Kamogawa, M.; Nagao, T. Seismicity prior to the 2016 Kumamoto earthquakes. Earth Planets Space 2016, 68, 187. [Google Scholar] [CrossRef]
- Fukuda, Y.; Itahara, M.; Kusumoto, S.; Higashi, T.; Takemura, K.; Mawatari, H.; Yusa, Y.; Yamamoto, T.; Kato, T. Crustal movements around the Beppu Bay area, East-Central Kyushu, Japan, observed by GPS 1996–1998. Earth Planets Space 2000, 52, 979–984. [Google Scholar] [CrossRef]
- Miyazaki, S.; Heki, K. Crustal velocity field of southwest Japan: Subduction and arc–arc collision. J. Geophys. Res. 2001, 106, 4305–4326. [Google Scholar] [CrossRef]
- Nishimura, S.; Hashimoto, M. A model with rigid rotations and slip deficits for the GPS-derived velocity field in Southwest Japan. Tectonophysics 2006, 421, 187–207. [Google Scholar] [CrossRef]
- Takayama, H.; Yoshida, A. Crustal deformation in Kyushu derived from GEONET data. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- ERC/HERP (Earthquake Research Committee/Headquarters for Earthquake Research Promotion). Elevation of the Futagawa Fault Zone and the Hinagu Fault Zone. 1 February 2013 Version (Partially Revised). (In Japanese). Available online: http://www.jishin.go.jp/main/chousa/13feb_chi_kyushu/k_11.pdf (accessed on 17 June 2016).
- Geological Survey of Japan. Surface Earthquake Faults Associated with the 2016 Kumamoto Earthquake. (In Japanese). Available online: https://www.gsi.jp/hazards/earthquake/kumamoto2016/kumamoto20160513-1.html (accessed on 10 August 2016).
- Okada, S.; Toda, S. Report on the emergency field survey of the 2016 Kumamoto earthquake. In Report Presented at the Second Emergency Meeting, International Research Institute of Disaster Science; Tohoku University: Sendai, Japan, 2016; Available online: http://irides.tohoku.ac.jp/media/files/earthquake/eq/IRIDeS_Kumamoto_earthquake_okada_20160419.pdf (accessed on 16 May 2016).
- Fukahata, Y.; Hashimoto, M. Simultaneous estimation of the dip angles and slip distribution on the faults of the 2016 Kumamoto earthquake through a weak nonlinear inversion of InSAR data. Earth Planets Space 2016, 68, 204. [Google Scholar] [CrossRef]
- Himematsu, Y.; Furuya, M. Fault source model for the 2016 Kumamoto earthquake sequence based on ALOS-2/PALSAR-2 pixel-offset data: Evidence for dynamic slip partitioning (EPSP-D-16-00163). Earth Planets Space 2016, 68, 169. [Google Scholar] [CrossRef]
- Shirahama, Y.; Yoshimi, M.; Awata, Y.; Maruyama, T.; Azuma, T.; Miyashita, Y.; Mori, H.; Imanishi, K.; Takeda, N.; Ochi, T.; et al. Characteristics of the surface ruptures associated with the 2016 Kumamoto earthquake sequence, central Kyushu, Japan. Earth Planets Space 2016, 68, 191. [Google Scholar] [CrossRef]
- National Institute of Advanced Industrial Science and Technology. Active Fault Database of Japan, 28 February 2012 version. Research Information Database DB095, National Institute of Advanced Industrial Science and Technology. 2012. Available online: https://gbank.gsj.jp/activefault/index_e_gmap.html (accessed on 11 July 2016).
- Wegmuller, U.; Werner, C. Gamma SAR processor and ineterferometry software. In Proceedings of the 3rd ERS Symposium, Florence, Italy, 14–21 March 1997; pp. 1687–1692. [Google Scholar]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer: Dordrecht, The Netherlands, 2001. [Google Scholar] [CrossRef]
- Tralli, D.M.; Blom, R.G.; Zlotnicki, V.; Donnellan, A.; Evans, D.L. Satellite remote sensing of earthquake, volcano, flood, landslide and coastal inundation hazards. ISPRS J. Photogramm. Remote Sens. 2005, 59, 185–198. [Google Scholar] [CrossRef]
- Yang, Y.H.; Chen, Q.; Xu, Q.; Zhang, Y.; Yong, Q.; Liu, G. Coseismic surface deformation of the 2014 Napa earthquake mapped by Sentinel-1A SAR and accuracy assessment with COSMO-SkyMed and GPS data as cross validation. Int. J. Digit. Earth 2017, 10, 1197–1213. [Google Scholar] [CrossRef]
- Tobita, M.; Murakami, M.; Nakagawa, H.; Yarai, H.; Fujiwara, S.; Rosen, P.A. 3-D surface deformation of the 2000 Usu eruption measured by matching of SAR images. Geophys. Res. Lett. 2001, 28, 4291–4294. [Google Scholar] [CrossRef]
- Strozzi, T.; Luckman, A.; Murray, T.; Wegmüller, U.; Werner, U. Glacier motion estimation using SAR offset-tracking procedures. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2384–2391. [Google Scholar] [CrossRef]
- Casu, F.; Manconi, A.; Pepe, A.; Lanari, R. Deformation time-series generation in areas characterized by large displacement dynamics: The SAR amplitude pixel-offset SBAS technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2752–2763. [Google Scholar] [CrossRef]
- Chen, Q.; Luo, R.; Yang, Y.H.; Yong, Q. Method and Accuracy of Ex tracting Surface Deformation Field from SAR Image Coregistration. Acta Geod. Cartogr. Sin. 2015, 44, 301–308, In Chinese. [Google Scholar] [CrossRef]
- Jonsson, S.; Zebker, H.; Segall, P.; Amelung, F. Fault slip distribution of the 1999 Mw7.1 Hector Mine, California, Earthquake, estimated from satellite radar and GNSS measurements. Bull. Seismol. Soc. Am. 2002, 92, 1377–1389. [Google Scholar] [CrossRef]
- Ozawa, T.; Fujita, E.; Ueda, H. Crustal deformation associated with the 2016 Kumamoto Earthquake and its effect on the magma system of Aso volcano. Earth Planets Space 2016, 68, 186. [Google Scholar] [CrossRef]
- USGS. Available online: http://earthquake.usgs.gov/earthquakes/eventpage/us20005iis#finite-fault (accessed on 11 June 2016).
- Okada, Y. Surface deformation to shear and tensile fault in a half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar]
- Chen, Q.; Liu, X.W.; Zhang, Y.J.; Zhao, J.; Xu, Q.; Yang, Y.; Liu, G.X. A nonlinear inversion of InSAR-observed coseismic surface deformation for estimating variable fault dips in the 2008 Wenchuan earthquake. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 179–192. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, Q.; Zhao, J.J.; Liu, X.; Yang, Y.; Zhang, Y.; Liu, G. Sequential modelling of the 2016 Central Italy earthquake cluster using multisource satellite observations and quantitative assessment of Coulomb stress change. Geophys. J. Int. 2020, 221, 451–466. [Google Scholar] [CrossRef]
- He, Z.; Chen, T.; Wang, M.; Li, Y. Multi-Segment Rupture Model of the 2016 Kumamoto Earthquake Revealed by InSAR and GPS Data. Remote. Sens. 2020, 12, 3721. [Google Scholar] [CrossRef]
- Fujiwara, S.; Yarai, H.; Kobayashi, T.; Morishita, Y.; Nakano, T.; Miyahara, B.; Nakai, H.; Miura, Y.; Ueshiba, H.; Kakiage, Y.; et al. Small-displacement linear surface ruptures of the 2016 Kumamoto earthquake sequence detected by ALOS-2 SAR interferometry. Earth Planets Space 2016, 68, 160. [Google Scholar] [CrossRef]
- Uchide, T.; Horikawa, H.; Nakai, M.; Matsushita, R.; Shigematsu, N.; Ando, R.; Imanishi, K. The 2016 Kumamoto–Oita earthquake sequence: Aftershock seismicity gap and dynamic triggering in volcanic areas. Earth Planets Space 2016, 68, 180. [Google Scholar] [CrossRef]
- Kobayashi, T. Earthquake rupture properties of the 2016 Kumamoto earthquake foreshocks (Mj 6.5 and Mj 6.4) revealed by conventional and multiple-aperture InSAR. Earth Planets Space 2017, 69, 7. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).