
Elevation Spatial Variation Analysis and Compensation in GEO SAR Imaging


Abstract
1. Introduction
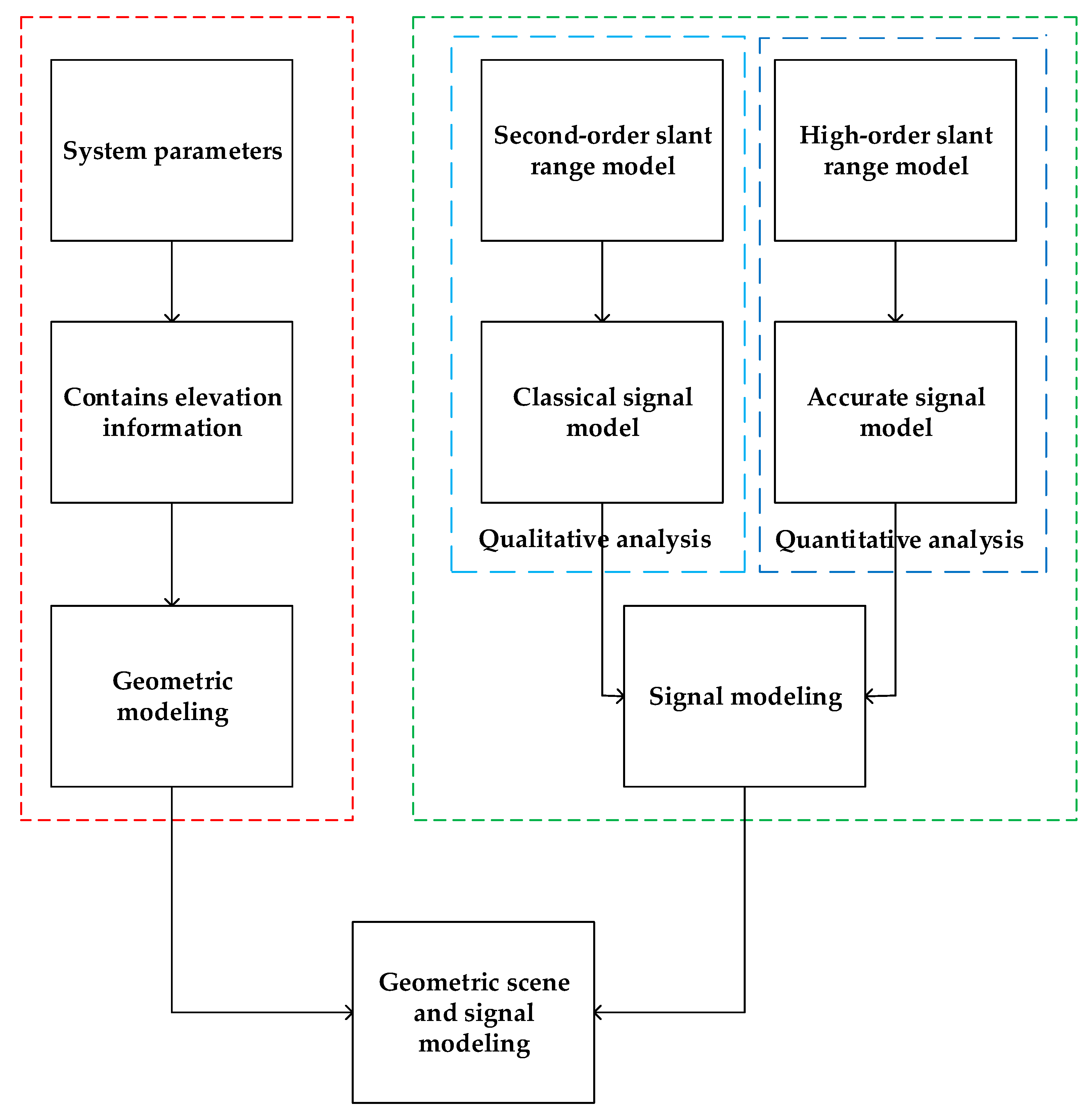
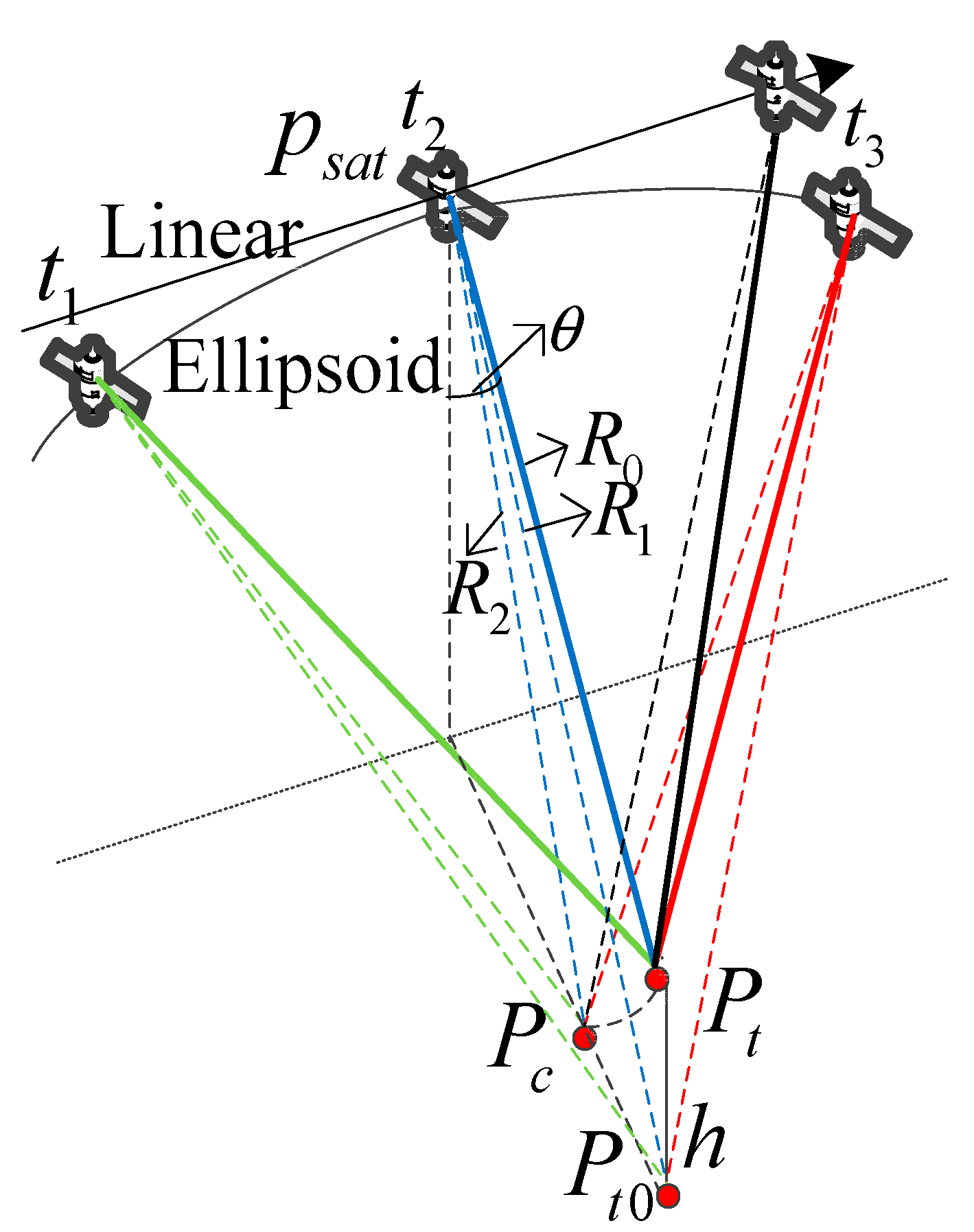
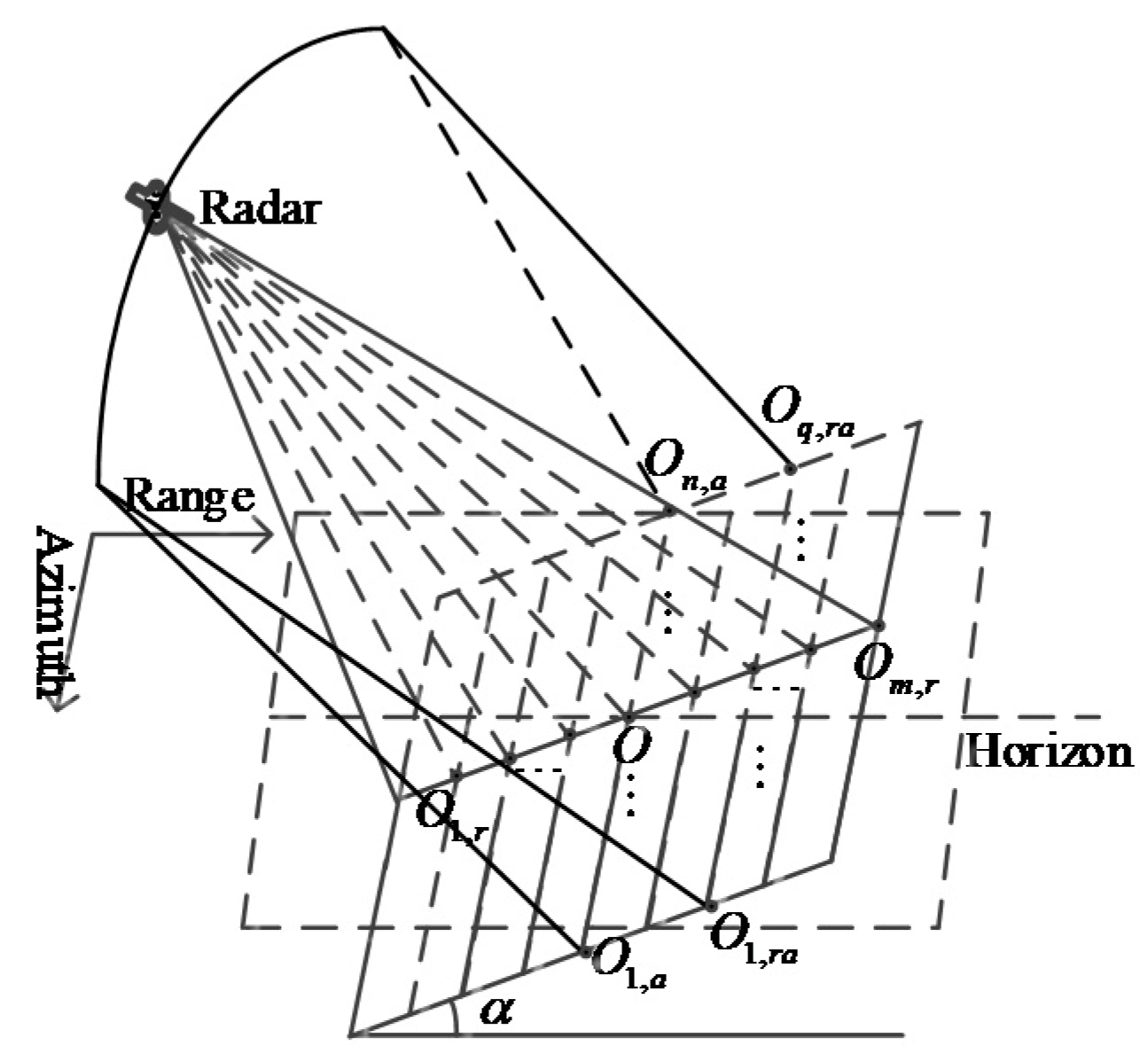
2. Geometric Scene and Signal Modeling with Elevation Information
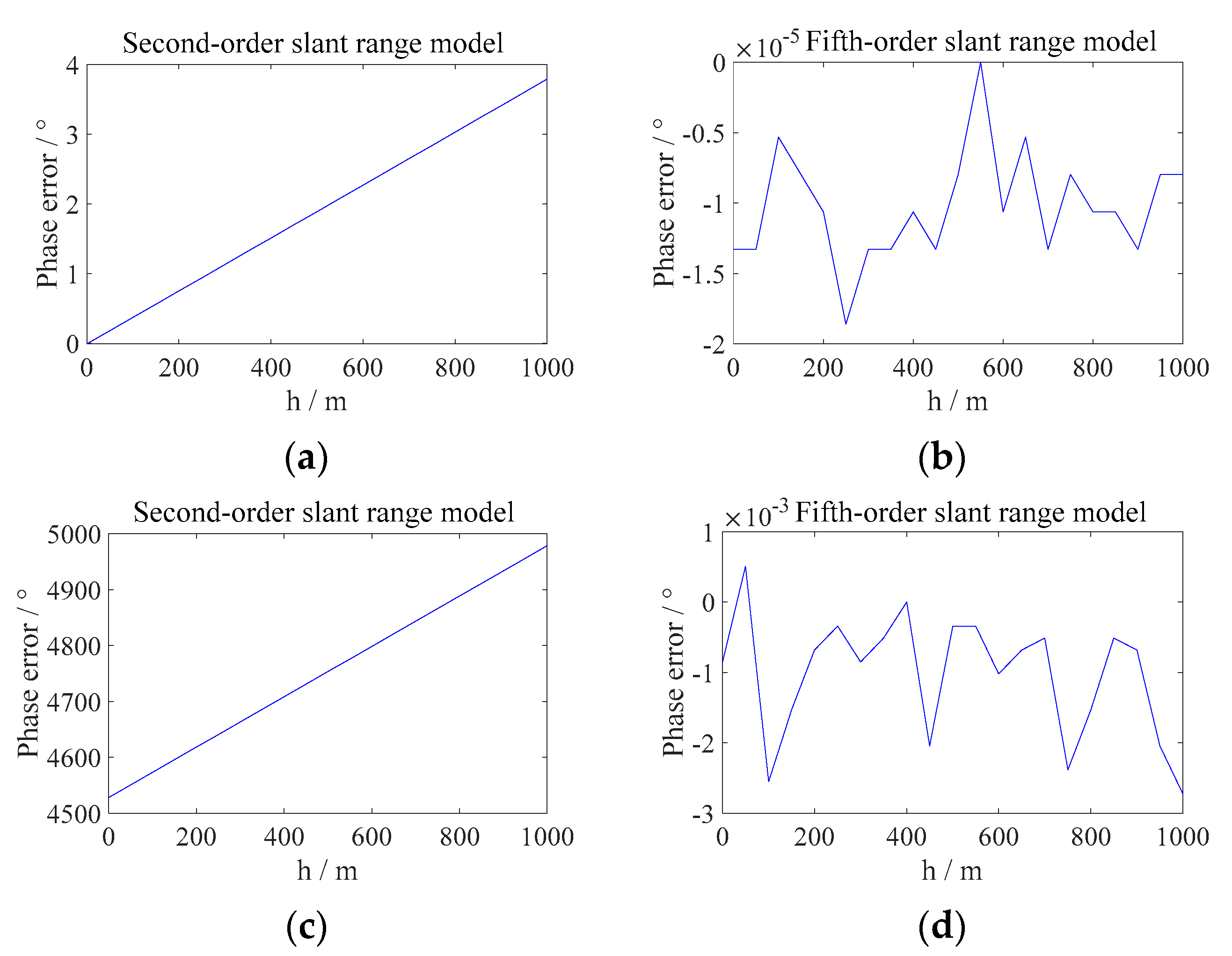
2.1. Signal Model Using the Second-Order Slant Range
2.2. Signal Model Using the High-Order Slant Range
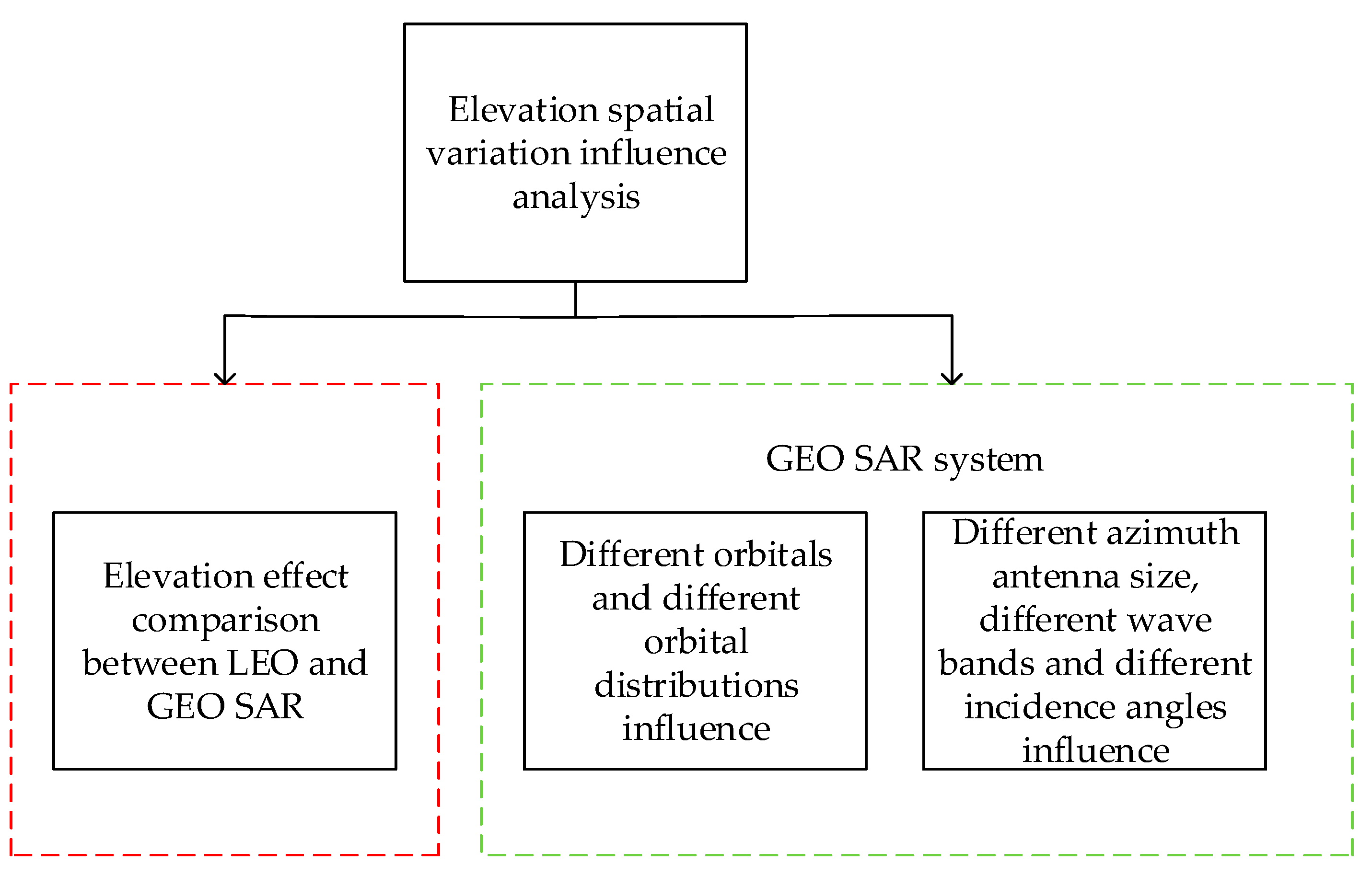
3. Error Analysis Introduced by Elevation under Different System Parameters
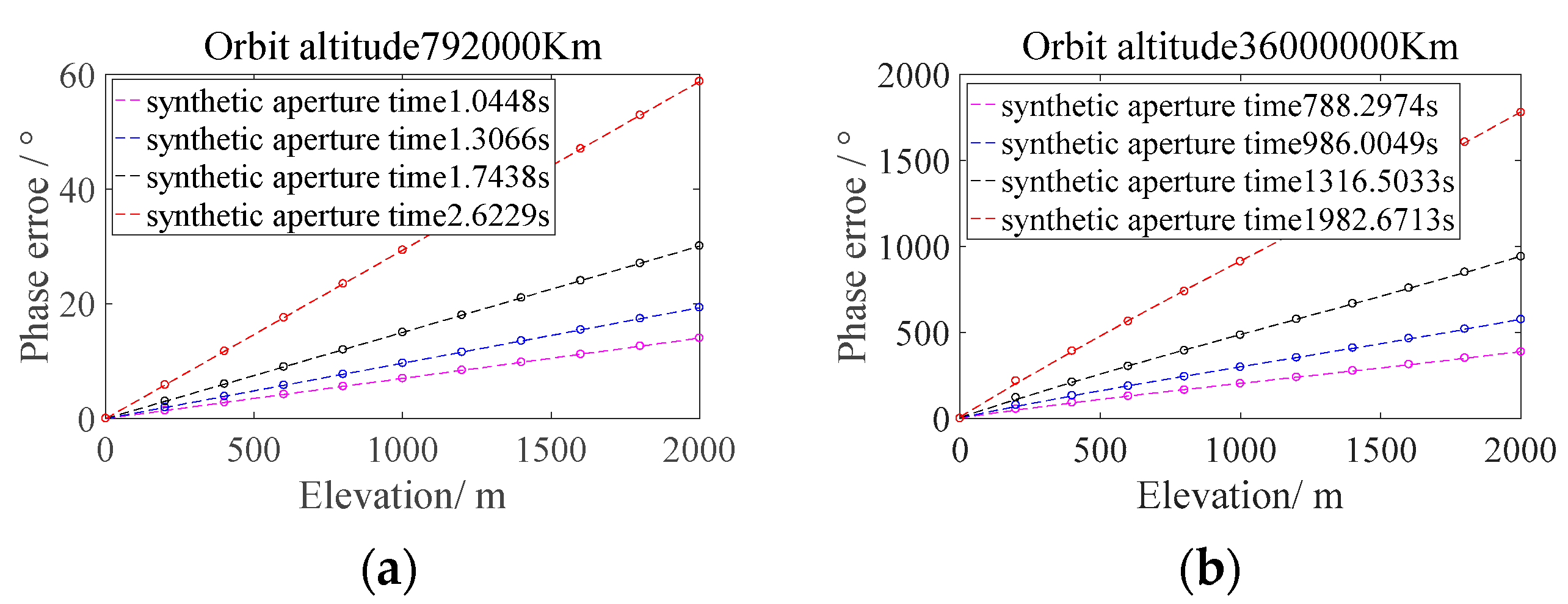
3.1. Elevation Effect Comparison Between LEO and GEO SAR
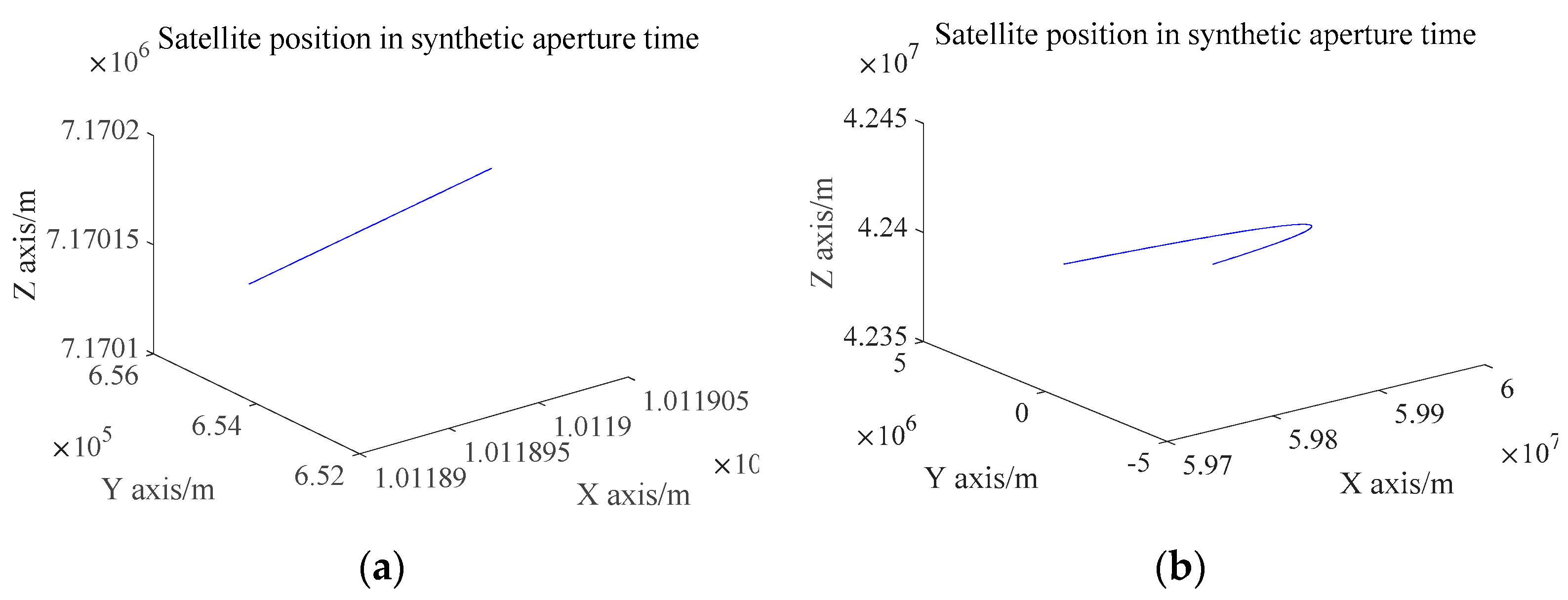
3.2. Influence of Orbit and Different Position Distributions on Orbits
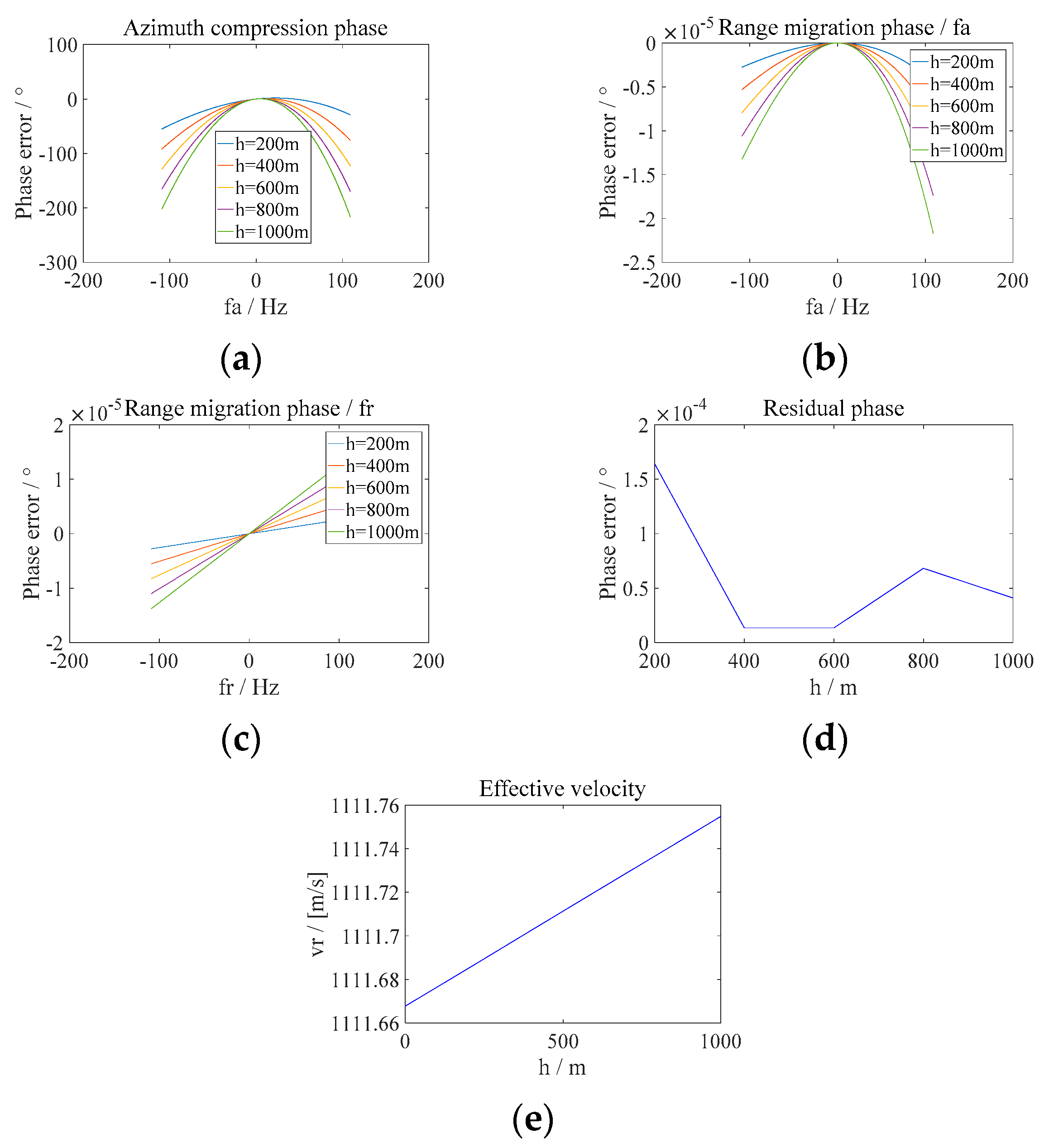
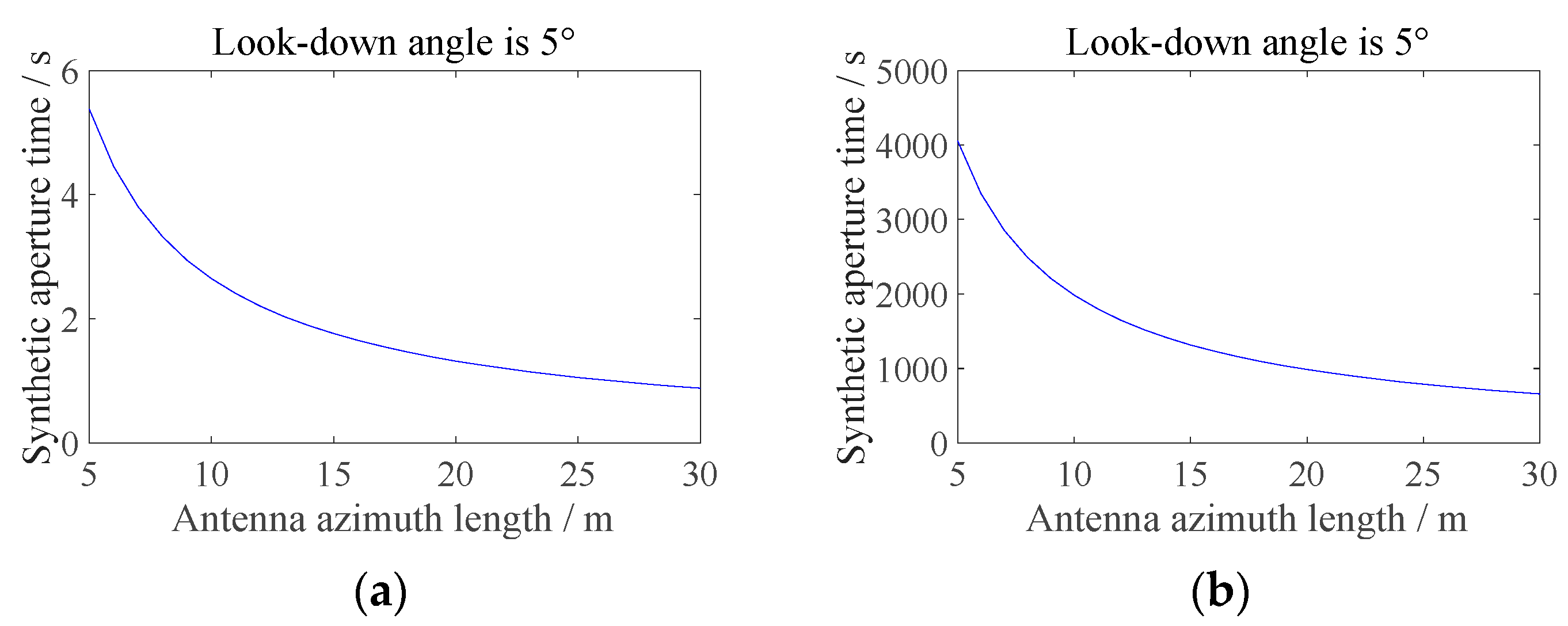
3.3. Influence of Different Azimuth Antenna Size, Different Wave Bands and Different Incidence Angles
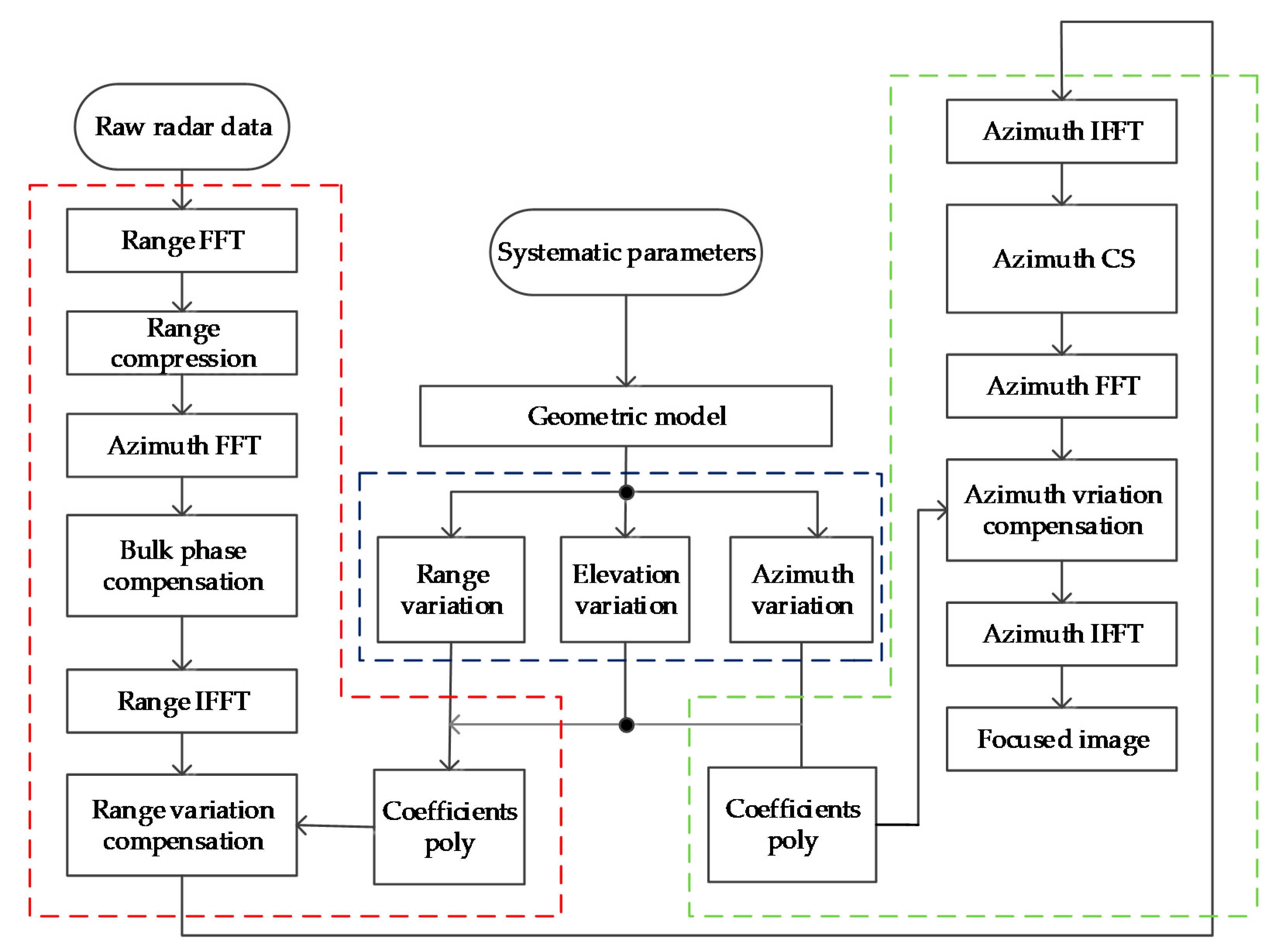
4. Elevation Spatial Variation Compensation Algorithm in GEO SAR Image Formation
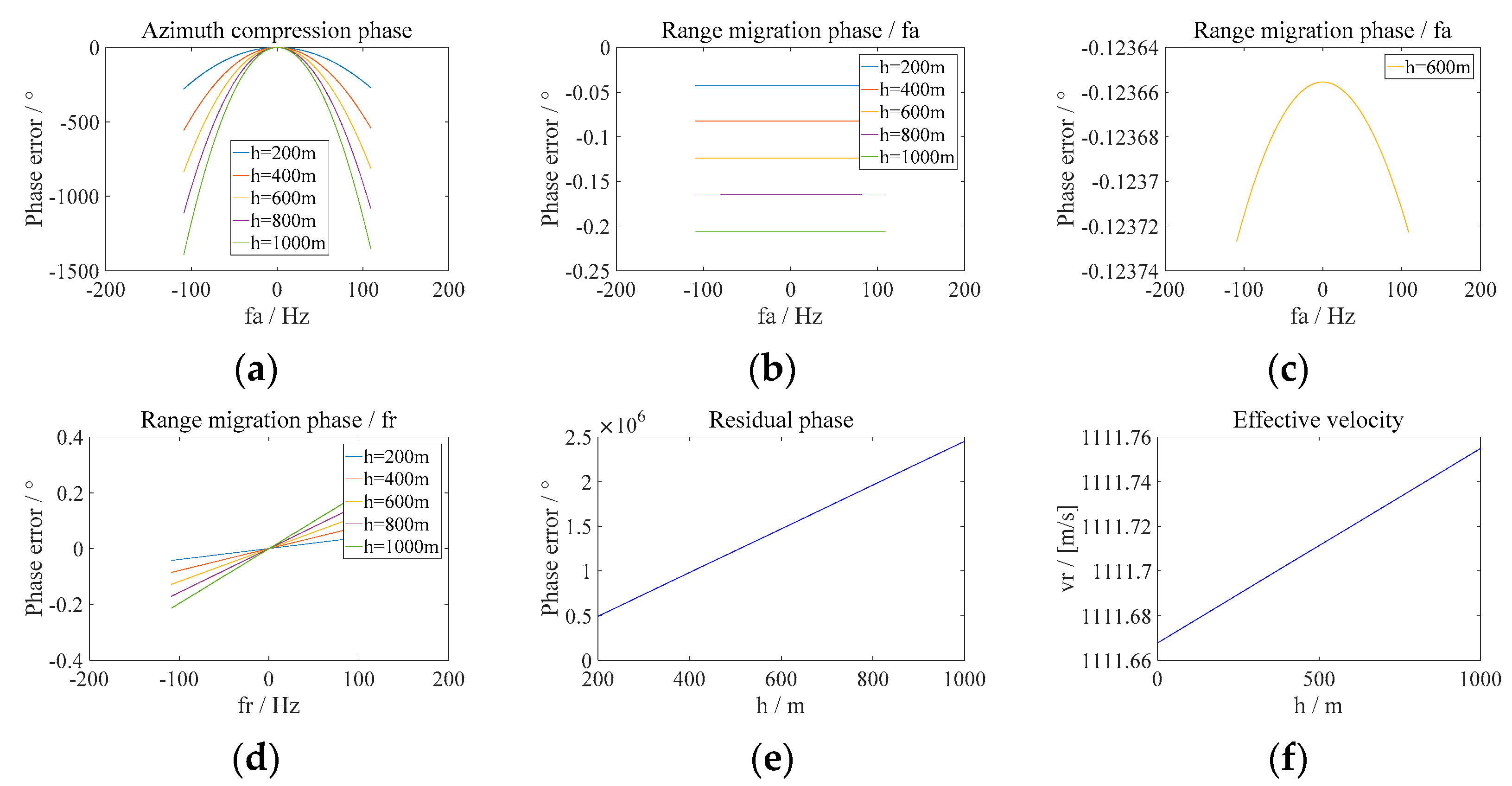
4.1. Signal Model Considering Spatial Variation
4.2. Error Compensation
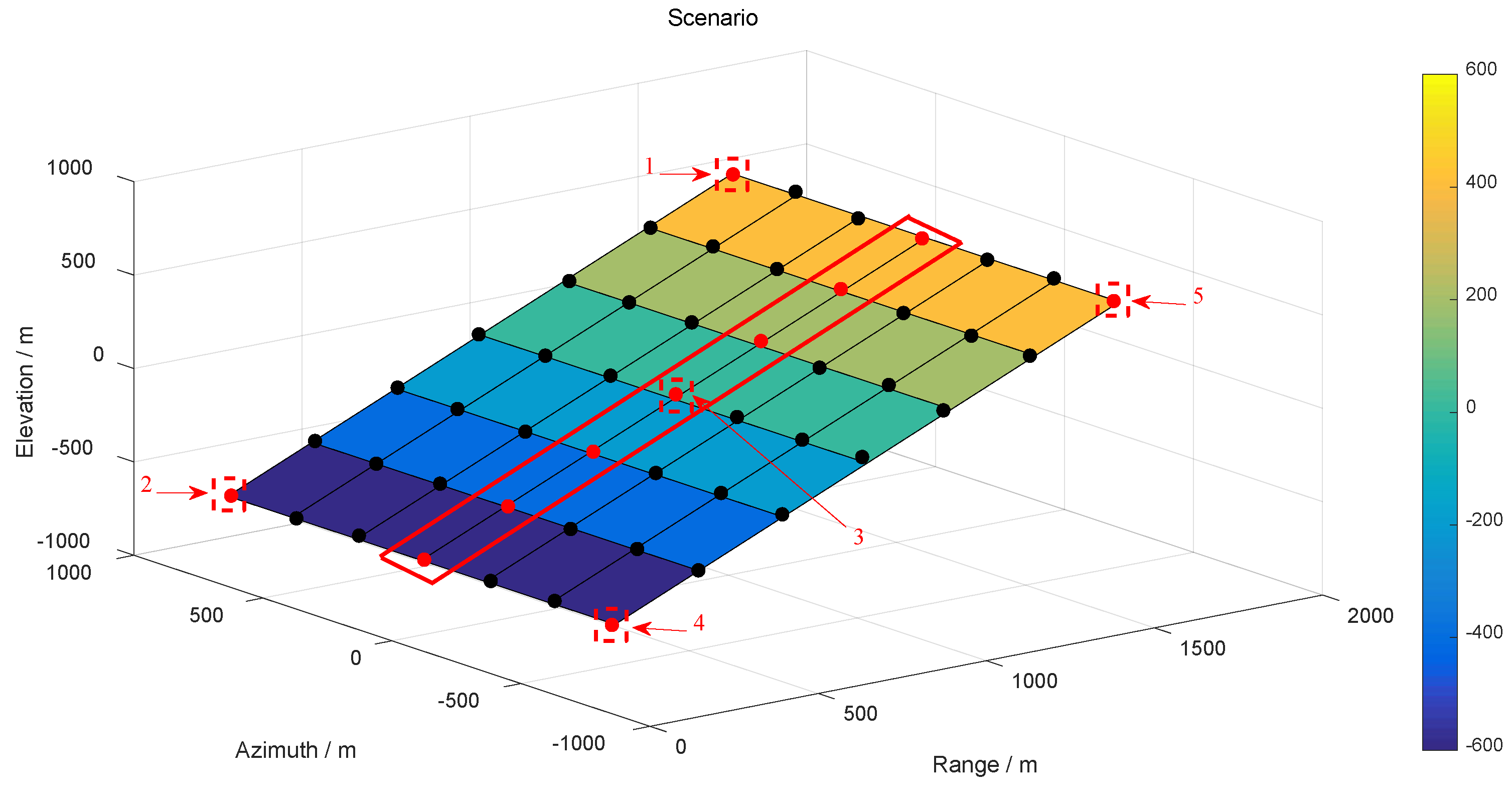
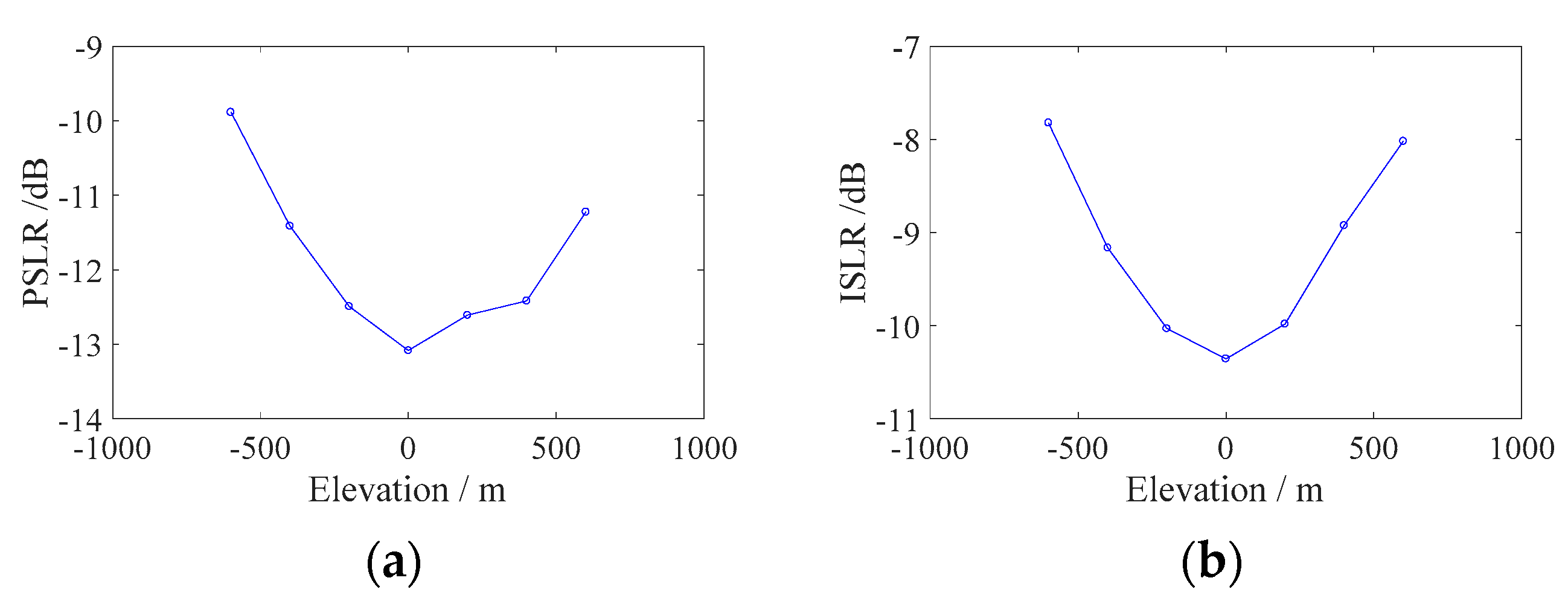
5. Simulation
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- DLR. Terra SAR-X Ground Segment Basic Product Specification Document; TX-GS-DD-3302; German Aerospace Center: Cologne, Germany, 2010. [Google Scholar]
- Prats, P.; Scheiber, R.; Marotti, L.; Wollstadt, S.; Reigber, A. TOPS interferometry with Terra SAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3179–3188. [Google Scholar] [CrossRef]
- Tomiyasu, K. Synthetic aperture radar in geosynchronous orbit. In Proceedings of the Digest International IEEE Antennas Propagation Symposium, College Park, MD, USA, 15–19 May 1978; pp. 42–45. [Google Scholar]
- Tomiyasu, K. Synthetic Aperture Radar Imaging from an Inclined Geosynchronous Orbit. IEEE Trans. Geosci. Remote Sens. 1983, 21, 324–329. [Google Scholar] [CrossRef]
- Cutrona, L.; Skolnik, M. Radar Handbook; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Cazzani, L.; Colesanti, C.; Leva, D.; Nesti, G.; Prati, C.; Rocca, F.; Tarch, D. A ground-based parasitic SAR experiment. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2132–2141. [Google Scholar] [CrossRef]
- Erik, M. Handbook of Geostationary Orbits, 1st ed.; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1994; pp. 886–1070. [Google Scholar]
- Bruno, D.; Hobbs, S. Radar imaging from geosynchronous orbit: Temporal decorrelation aspects. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2924–2929. [Google Scholar] [CrossRef]
- Kempf, T.; Anglberger, H.; Suess, H. Depth-of-Focus Issues on Spaceborne very High Resolution SAR. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 7448–7451. [Google Scholar]
- Rodriguez-Cassola, M.; Prats-Iraola, P.; De Zan, F.; Scheiber, R.; Reigber, A. Doppler-related focusing aspects in the TOPS imaging mode. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013. [Google Scholar]
- Macedo, K.; Scheiber, R. Precise topography- and aperture-dependent motion compensation for airborne SAR. IEEE Geosci. Remote Sens. Lett. 2005, 2, 172–176. [Google Scholar]
- Blacknell, D.; Freeman, A.; Quegan, S.; Ward, I.; Finley, I.; Oliver, C.; White, R.; Wood, J. Geometric accuracy in airborne SAR images. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 241–258. [Google Scholar] [CrossRef]
- Duque, S.; Breit, H.; Balss, U.; Parizzi, A. Absolute height estimation using a single Terra SAR-X staring spotlight acquisition. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1735–1739. [Google Scholar] [CrossRef]
- Prats, P.; Scheiber, R.; Rodriguez, M. On the Processing of Very High Resolution Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6003–6015. [Google Scholar] [CrossRef]
- Prats, P.; Macedo, K.; Reigber, A.; Scheiber, R.; Mallorqui, J. Comparison of topography- and aperture-dependent motion compensation algorithms for airborne SAR. IEEE Geosci. Remote Sens. Lett. 2007, 4, 349–353. [Google Scholar] [CrossRef]
- Hu, B.; Jiang, Y.; Zhang, Y.; Yeo, T. Accurate slant range model and focusing method in geosynchronous SAR. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4464–4467. [Google Scholar]
- Zhang, Q.; Yin, W.; Ding, Z. An Optimal Resolution Steering Method for Geosynchronous Orbit SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1732–1736. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, S.; Xiao, B. An advanced equivalent slant range model and image formation in geosynchronous SAR. In Proceedings of the 2012 International Workshop on Microwave and Millimeter Wave Circuits and System Technology, Chengdu, China, 19–20 April 2012; pp. 1–4. [Google Scholar]
- Hu, B.; Jiang, Y.; Zhang, S.; Zhang, Y. Generalized omega-K algorithm for geosynchronous SAR image formation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2286–2290. [Google Scholar] [CrossRef]
- Geng, J.; Yu, Z.; Li, C.; Wei, L. Squint Mode GEO SAR Imaging Using Bulk Range Walk Correction on Received Signals. Remote. Sens. 2019, 11, 17. [Google Scholar] [CrossRef]
- Li, Z.; Li, C.; Yu, Z.; Zhou, J.; Chen, J. Back projection algorithm for high resolution GEO-SAR image formation. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 336–339. [Google Scholar]
- Neo, Y.; Wong, F.; Cumming, I. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. IEEE. Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- Zhu, Y.; Ke, M.; Zhang, T.; Li, G.; Ding, Z. Image Representation of GEO SAR Time-Variant Scene. In Proceedings of the 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–5. [Google Scholar]
- Li, D.; Zhu, X.; Dong, Z.; Yu, A.; Zhang, Y. Background Tropospheric Delay in Geosynchronous Synthetic Aperture Radar. Remote. Sens. 2020, 12, 3081. [Google Scholar] [CrossRef]
- Curlander, J.; McDonough, R. Synthetic Aperture Radr: Systems and Signal Processing; John Wiley Sons: New York, NY, USA, 1991. [Google Scholar]
- Feng, H.; Qi, C.; Zhen, D.; Guang, J.; Dian, L. Modeling and high-precision processing of the azimuth shift variation for spaceborne HRWS SAR. Sci. China Inf. Sci. 2012, 56, 1–12. [Google Scholar] [CrossRef]
- Li, D.; Wu, M.; Sun, Z.; He, F.; Dong, Z. Modeling and Processing of Two-Dimensional Spatial-Variant Geosynchronous SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3999–4009. [Google Scholar] [CrossRef]
- Hu, C.; Tao, Z. The accurate resolution analysis in Geosynchronous SAR. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 925–928. [Google Scholar]
- Wong, F.; Cumming, I.; Neo, Y. Focusing Bistatic SAR Data Using the Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- An, H.; Wu, J.; Sun, Z.; Yang, J. A two-step nonlinear chirp scaling method for multichannel GEO spaceborne-airborne bistatic SAR spectrum reconstructing and focusing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 16. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Semi-major axis | 42,164.17 km | Right ascension of ascending | 115° |
| Eccentricity | 1 × 10−8 | Perigee | 270° |
| Orbital inclination | 60° | True anomaly | 90° |
| Carrier frequency | 1.25 GHz | Antenna size | 30 m × 30 m |
| Squint angle | 0° | Incident angle | 35.2° |
| Pulse duration | 2.5 μs | Chirp bandwidth | 30 MHz |
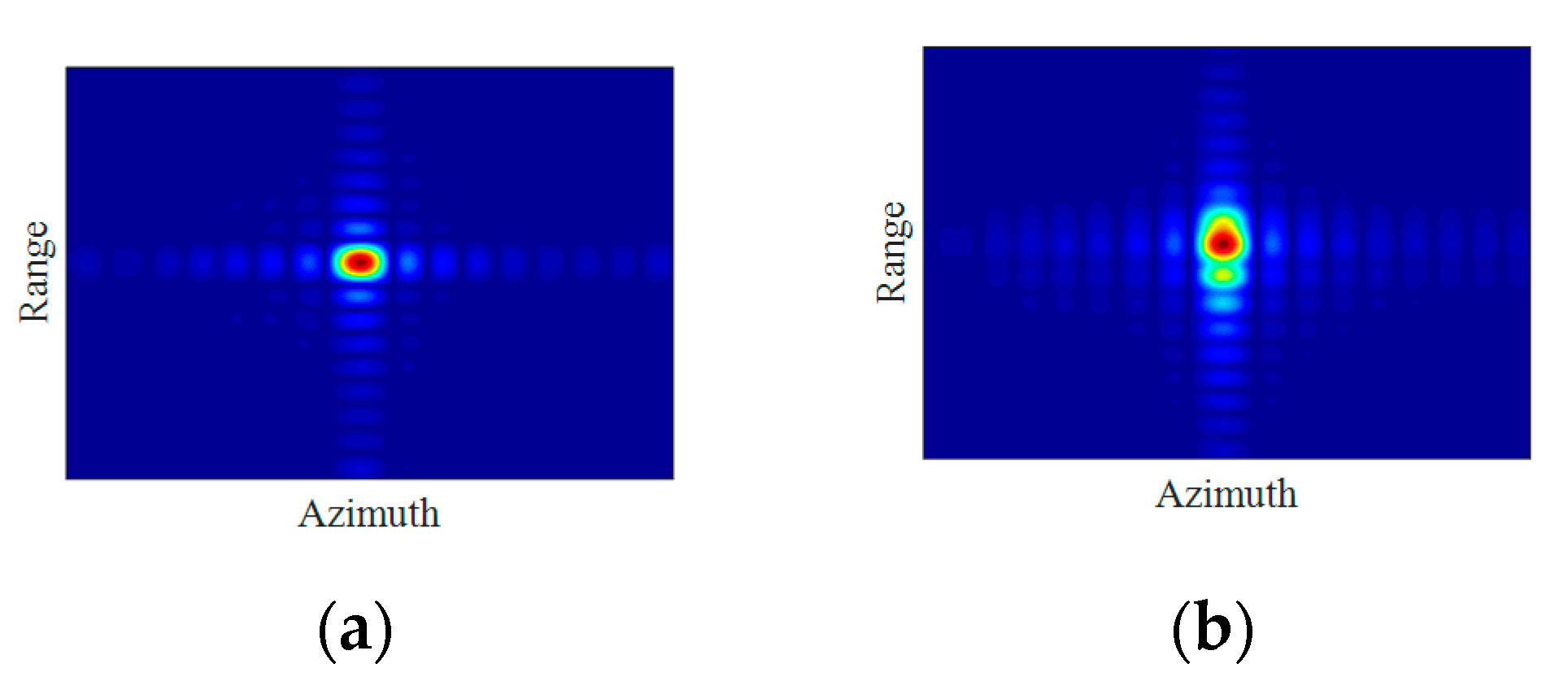
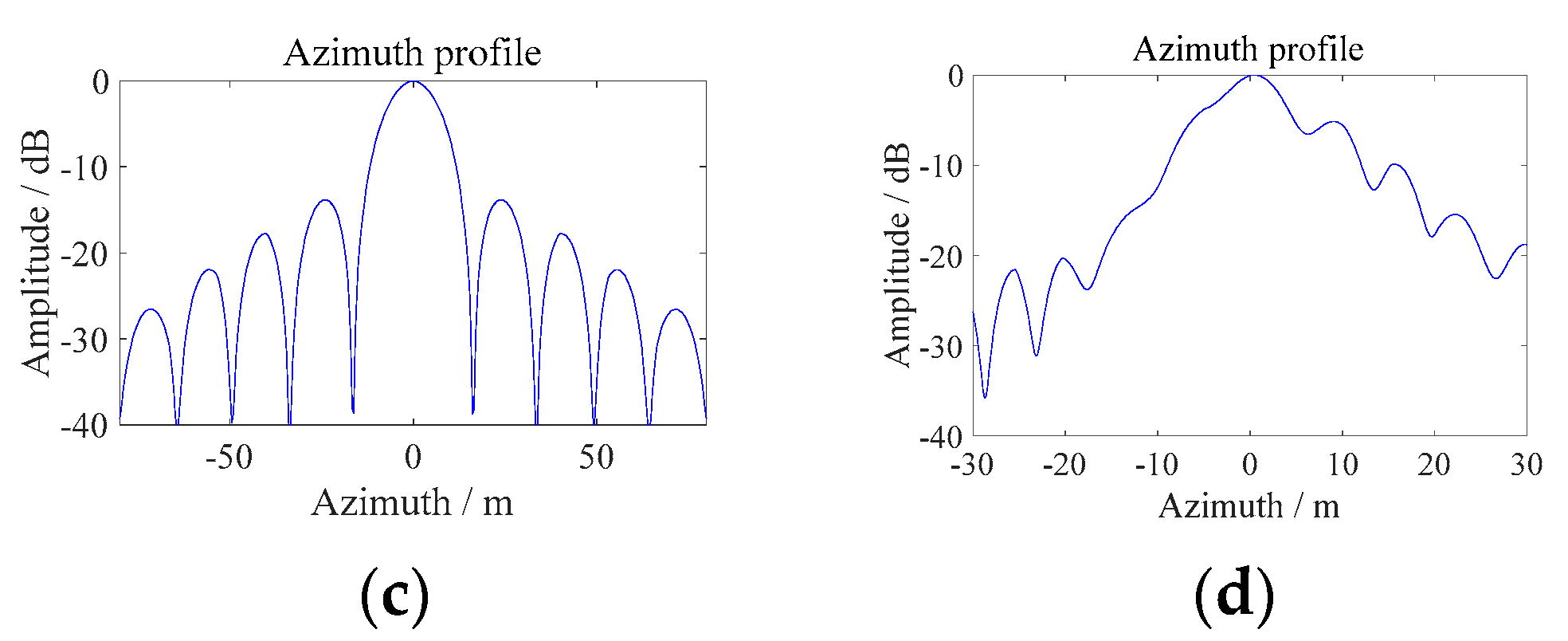
| Mode | Main Lobe Broadening | PSLR/dB | ISLR/dB |
|---|---|---|---|
| LEO | 1.0625 | −13.9454 | −10.9699 |
| GEO | 1.4375 | −5.1536 | −6.0431 |
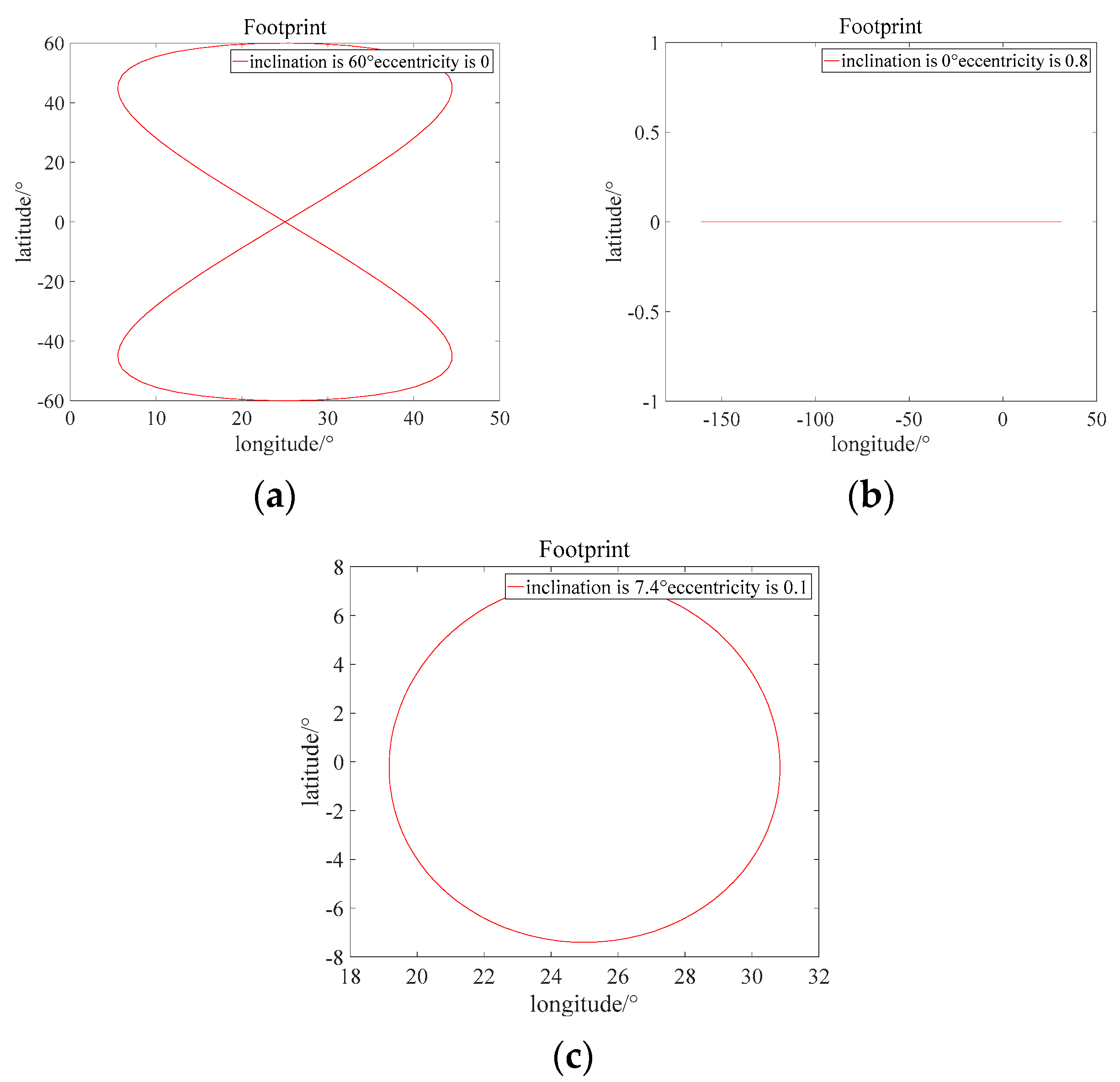
| Orbital Parameters | Type “8” | Type “–” | Type “O” |
|---|---|---|---|
| Inclination | 60° | 0° | 7.4° |
| Eccentricity | 0 | 0.1 | 0.1 |
| Perigee | 270° | 270° | 270° |
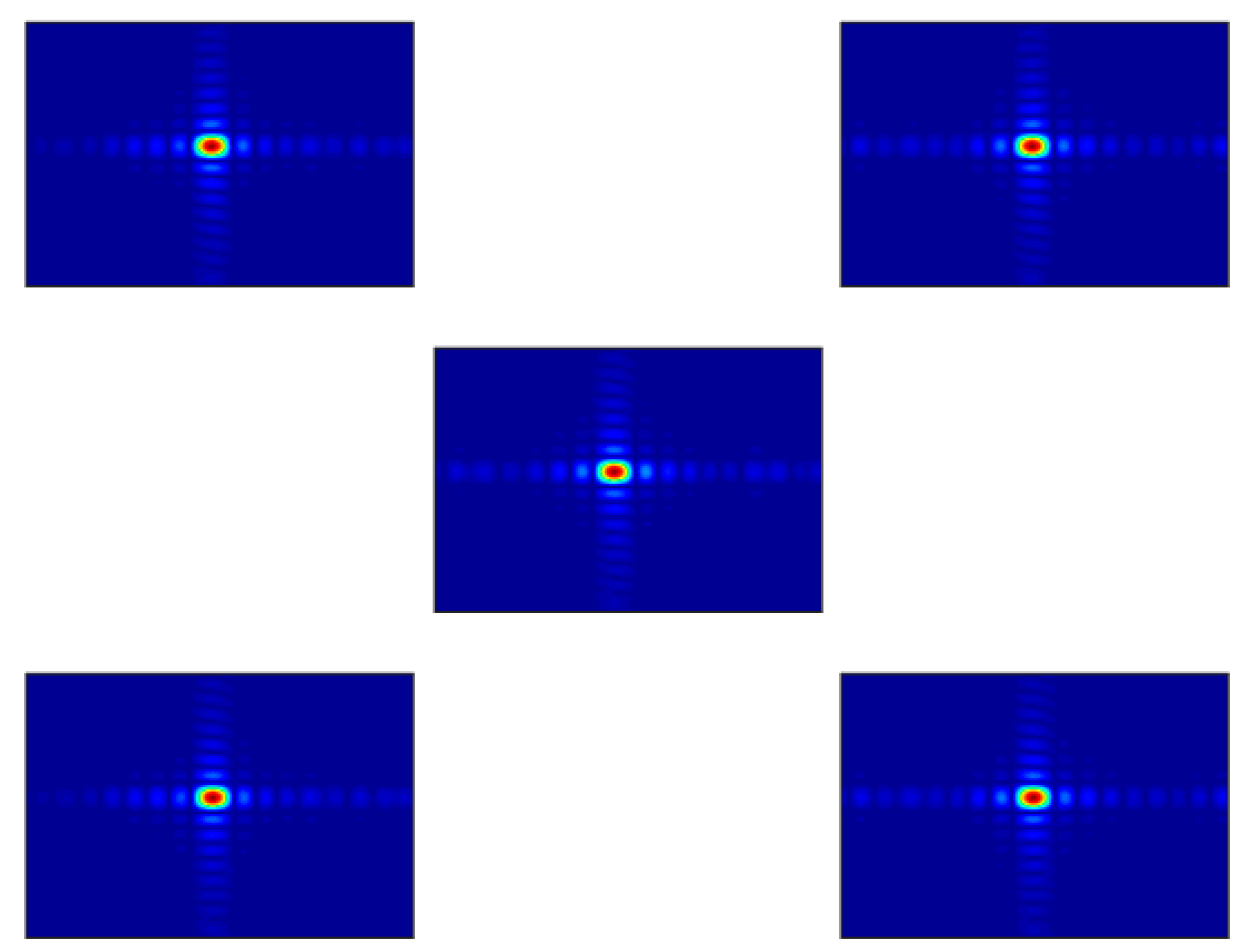
| Point | Resolution (m) | PSLR (dB) | ISLR (dB) |
|---|---|---|---|
| 1 | 2.0914 | −13.1584 | −10.2438 |
| 2 | 2.0931 | −13.1452 | −10.2164 |
| 3 | 2.0903 | −13.2334 | −10.3586 |
| 4 | 2.0910 | −13.1576 | −10.2746 |
| 5 | 2.0907 | −13.1895 | −10.2300 |
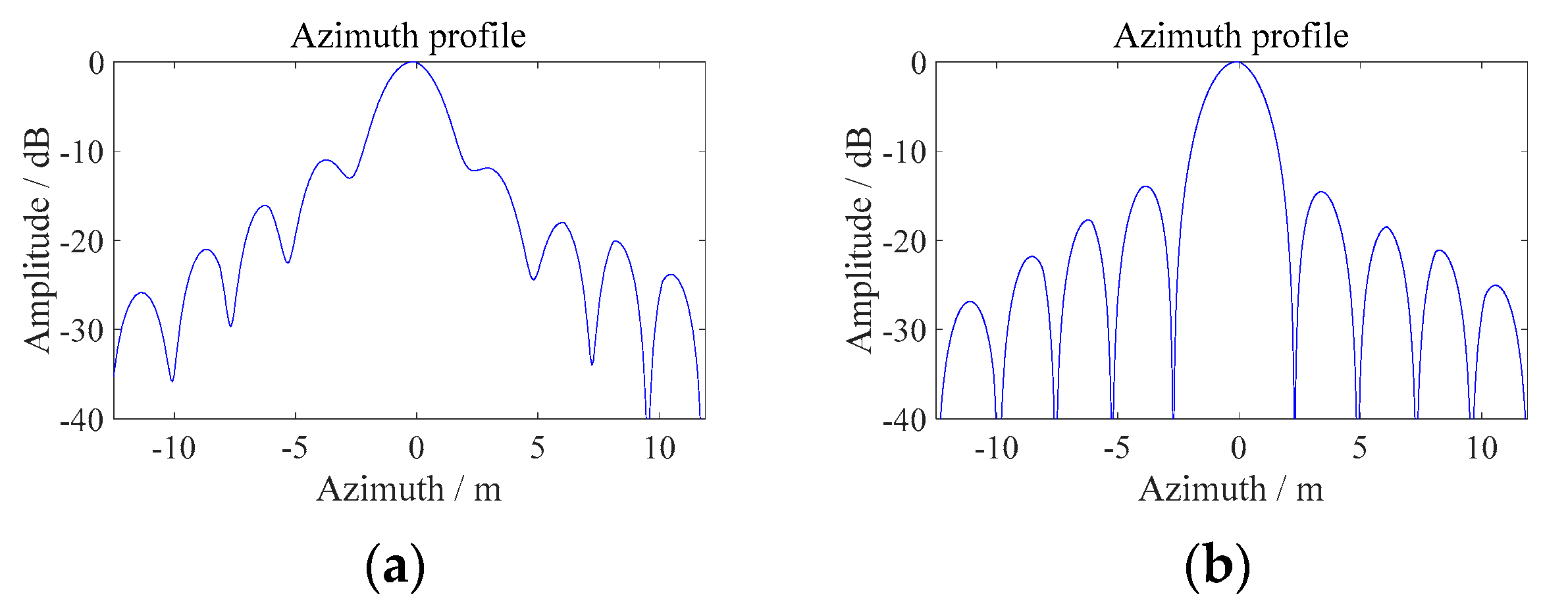
| Point | Resolution (m) | PSLR (dB) | ISLR (dB) |
|---|---|---|---|
| A | 3.1385 | −13.0990 | −10.3013 |
| B | 3.1385 | −13.0193 | −10.3614 |
| C | 3.1385 | −13.1243 | −10.4115 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, F.; Li, D.; Dong, Z.; Huang, Y.; He, Z.; Chen, X. Elevation Spatial Variation Analysis and Compensation in GEO SAR Imaging. Remote Sens. 2021, 13, 1888. https://doi.org/10.3390/rs13101888
Chang F, Li D, Dong Z, Huang Y, He Z, Chen X. Elevation Spatial Variation Analysis and Compensation in GEO SAR Imaging. Remote Sensing. 2021; 13(10):1888. https://doi.org/10.3390/rs13101888
Chicago/Turabian StyleChang, Faguang, Dexin Li, Zhen Dong, Yang Huang, Zhihua He, and Xing Chen. 2021. "Elevation Spatial Variation Analysis and Compensation in GEO SAR Imaging" Remote Sensing 13, no. 10: 1888. https://doi.org/10.3390/rs13101888
APA StyleChang, F., Li, D., Dong, Z., Huang, Y., He, Z., & Chen, X. (2021). Elevation Spatial Variation Analysis and Compensation in GEO SAR Imaging. Remote Sensing, 13(10), 1888. https://doi.org/10.3390/rs13101888