Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates

 , ,
, , 


Abstract
1. Introduction
2. Materials and Methods
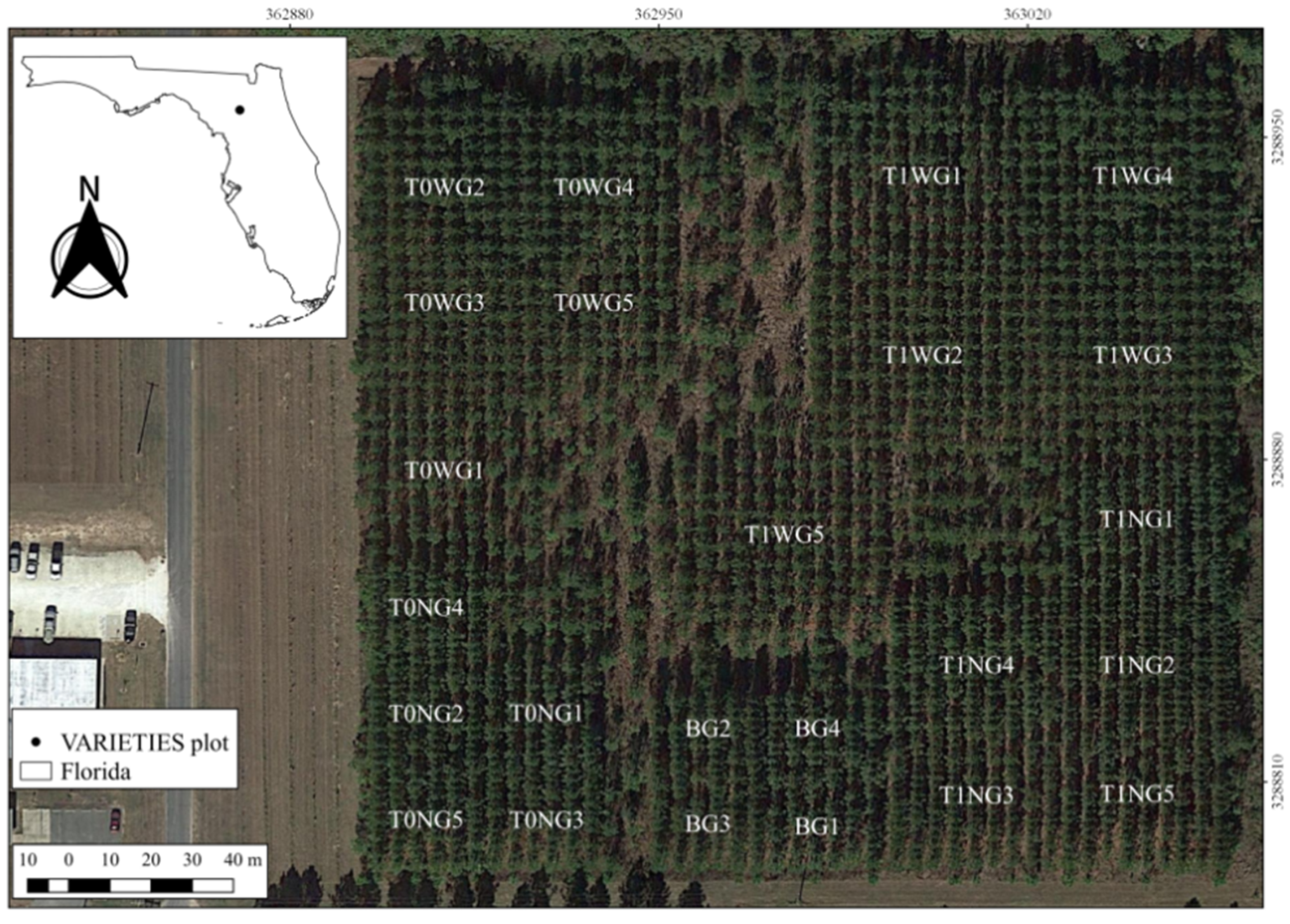
2.1. Study Area and Field Data Collection
2.2. Unnamed Aircraft Systems Surveying
2.3. Point Cloud Processing
2.4. Individual Tree Detection and Tree Height Measurement
2.5. Statistical Analysis
3. Results
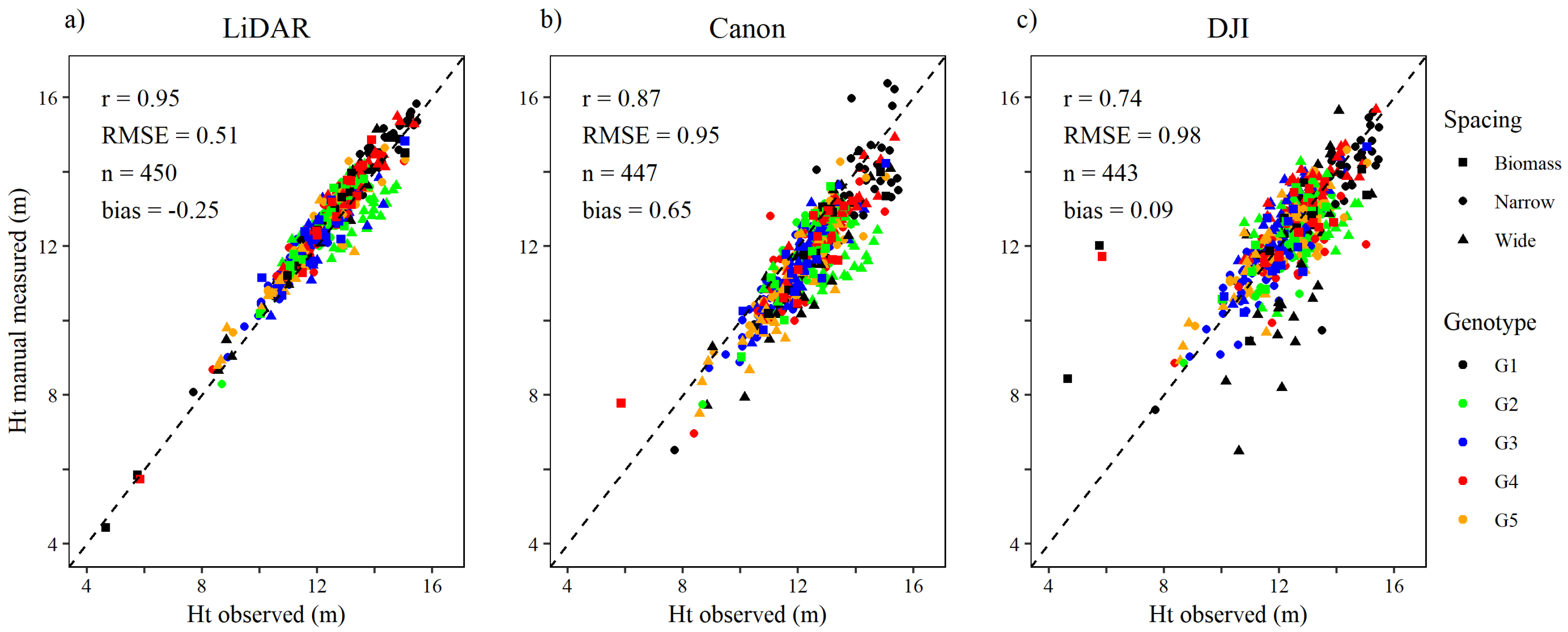
3.1. Manual Individual Tree Detection and Tree Height Measurement
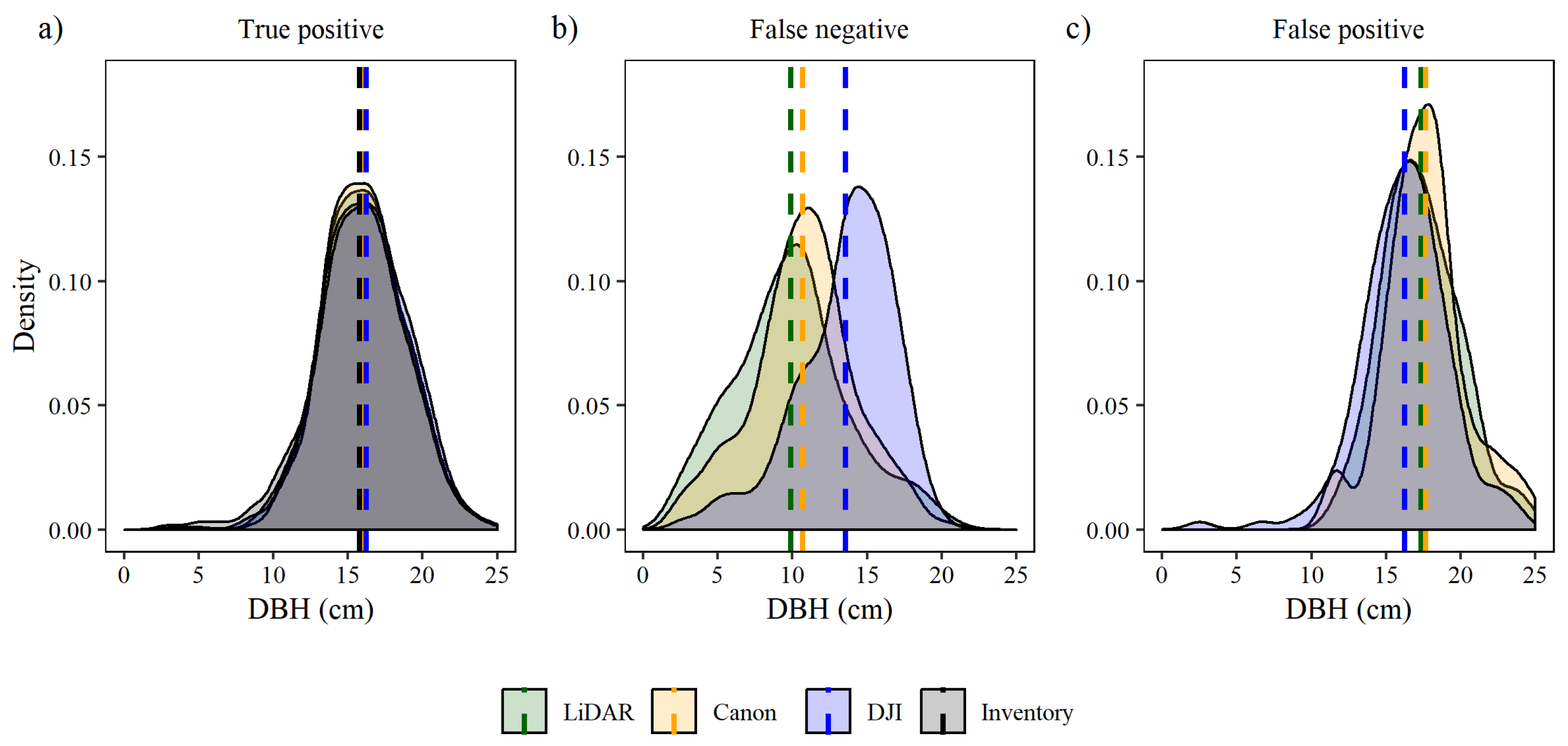
3.2. Automated Individual Tree Detection from Canopy Height Models
4. Discussion
4.1. Quality Assurance of Dense-Matching Point Clouds from Imagery
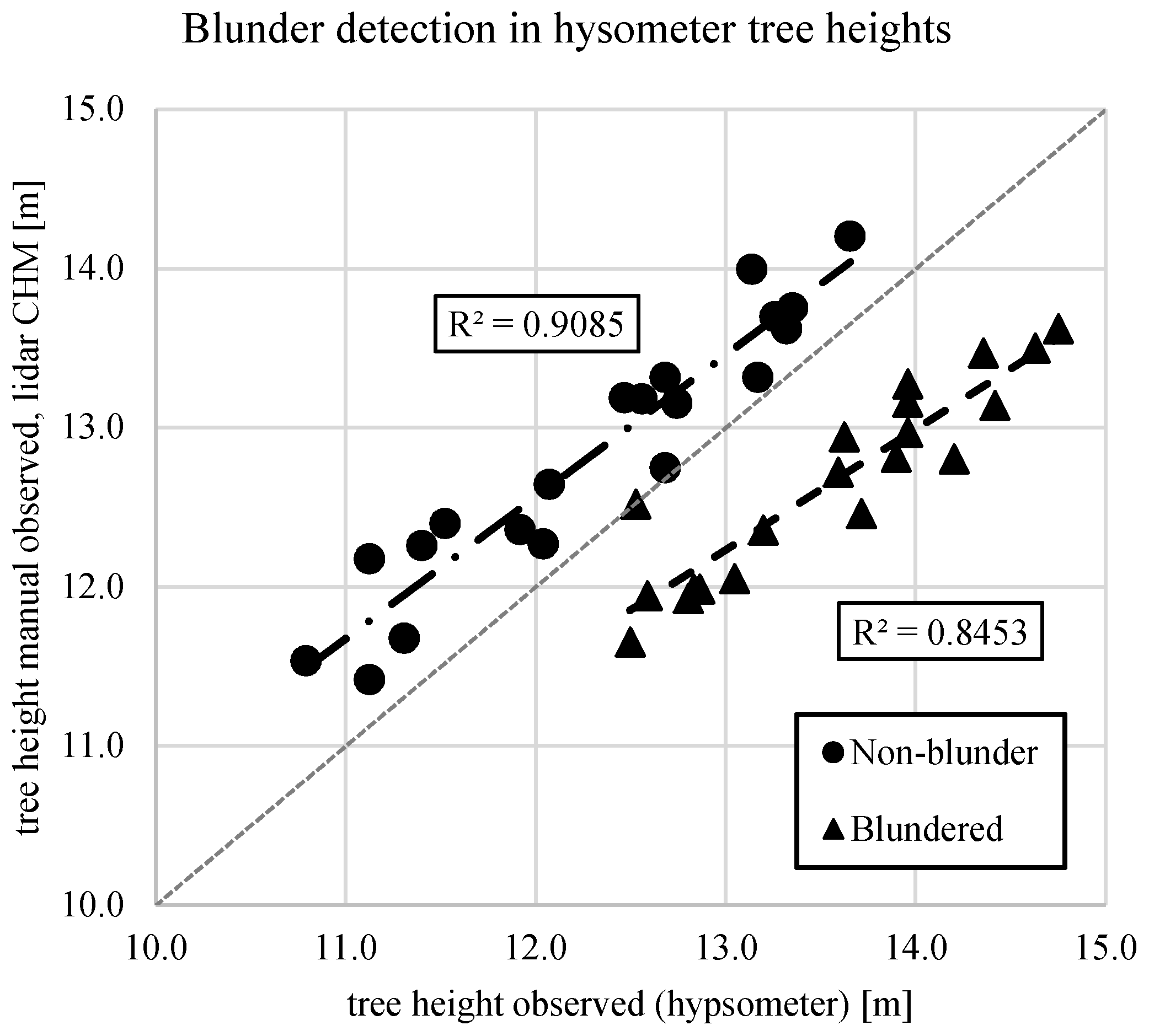
4.2. Detecting Errors in the Timber Cruise
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR Remote Sensing of Forest Structure. Prog. Phys. Geogr. Earth Environ. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar Remote Sensing for Ecosystem Studies. BioScience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Miller, D.R.; Quine, C.P.; Hadley, W. An Investigation of the Potential of Digital Photogrammetry to Provide Measurements of Forest Characteristics and Abiotic Damage. For. Ecol. Manag. 2000, 135, 279–288. [Google Scholar] [CrossRef]
- Spurr, S.H. Aerial Photographs in Forestry; The Ronald Press Company: New York, NY, USA, 1948; ISBN 978-1-114-16279-2. [Google Scholar]
- Toth, C.; Jóźków, G. Remote Sensing Platforms and Sensors: A Survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote Sensing of Vegetation Structure Using Computer Vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Grenzdörffer, G.J.; Guretzki, M.; Friedlander, I. Photogrammetric image acquisition and image analysis of oblique imagery. Photogramm. Rec. 2008, 23, 372–386. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Snavely, N.; Simon, I.; Goesele, M.; Szeliski, R.; Seitz, S.M. Scene Reconstruction and Visualization from Community Photo Collections. Proc. IEEE 2010, 98, 1370–1390. [Google Scholar] [CrossRef]
- Elaksher, A.F.; Bhandari, S.; Carreon-Limones, C.A.; Lauf, R. Potential of UAV Lidar Systems for Geospatial Mapping. In Proceedings of the Lidar Remote Sensing for Environmental Monitoring 2017, San Diego, CA, USA, 6–10 August 2017; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10406, p. 104060L. [Google Scholar]
- Guo, Q.; Su, Y.; Hu, T.; Zhao, X.; Wu, F.; Li, Y.; Liu, J.; Chen, L.; Xu, G.; Lin, G.; et al. An Integrated UAV-Borne Lidar System for 3D Habitat Mapping in Three Forest Ecosystems across China. Int. J. Remote Sens. 2017, 38, 2954–2972. [Google Scholar] [CrossRef]
- van Laar, A.; Akça, A. Forest Mensuration; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; ISBN 978-1-4020-5991-9. [Google Scholar]
- Karpina, M.; Jarząbek-Rychard, M.; Tymków, P.; Borkowski, A. UAV-Based Automatic Tree Growth Measurement for Biomass Estimation. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 685–688. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree Height Quantification Using Very High Resolution Imagery Acquired from an Unmanned Aerial Vehicle (UAV) and Automatic 3D Photo-Reconstruction Methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone Remote Sensing for Forestry Research and Practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Maas, H.-G.; Bienert, A.; Scheller, S.; Keane, E. Automatic Forest Inventory Parameter Determination from Terrestrial Laser Scanner Data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Korpela, I.; Dahlin, B.; Schäfer, H.; Bruun, E.; Haapaniemi, F.; Honkasalo, J.; Ilvesniemi, S.; Kuutti, V.; Linkosalmi, M.; Mustonen, J.; et al. Single-Tree Forest Inventory Using Lidar and Aerial Images for 3D Treetop Positioning, Species Recognition, Height and Crown Width Estimation. In Proceedings of the ISPRS Workshop on Laser Scanning, Espoo, Finland, 12–14 September 2007; pp. 227–233. [Google Scholar]
- Aschoff, T.; Spiecker, H. Algorithms for the Automatic Detection of Trees in Laser Scanner Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, W2. [Google Scholar]
- Simonse, M.; Aschoff, T.; Spiecker, H.; Thies, M. Automatic Determination of Forest Inventory Parameters Using Terrestrial Laser Scanning. In Proceedings of the ScandLaser Scientific Workshop on Airborne Laser Scanning of Forests, Umeå, Sweden, 2–4 September 2003; pp. 251–257. [Google Scholar]
- Wallace, L.; Musk, R.; Lucieer, A. An Assessment of the Repeatability of Automatic Forest Inventory Metrics Derived from UAV-Borne Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A Low-Cost Multi-Sensoral Mobile Mapping System and Its Feasibility for Tree Measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Lingua, A.; Marenchino, D.; Nex, F. Performance Analysis of the SIFT Operator for Automatic Feature Extraction and Matching in Photogrammetric Applications. Sensors 2009, 9, 3745–3766. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Shan, J.; Toth, C.K. (Eds.) Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018; ISBN 978-1-4987-7228-0. [Google Scholar]
- Baltsavias, E.P. A Comparison between Photogrammetry and Laser Scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual Tree-Crown Delineation and Treetop Detection in High-Spatial-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of Lidar Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Photoscan; Agisoft. 2018. Available online: https://www.agisoft.com/ (accessed on 20 October 2020).
- USGS National UAS Project Office. Unmanned Aircraft Systems Data Post-Processing: Structure-from-Motion Photogrammetry. 2017. Available online: https://uas.usgs.gov/nupo/pdf/USGSAgisoftPhotoScanWorkflow.pdf (accessed on 20 October 2020).
- Inertial Explorer®; NovAtel. 2018. Available online: https://novatel.com/products/waypoint-software/inertial-explorer (accessed on 20 October 2020).
- Girardeau-Montaut, D. CloudCompare. 2018. Available online: https://www.danielgm.net/cc/ (accessed on 19 October 2020).
- LAStools; rapidlasso GmbH. 2012. Available online: https://rapidlasso.com/lastools/ (accessed on 20 October 2020).
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A.; Klauberg, C.; Cardil, A. rLiDAR. 2017. Available online: http://mirrors.nics.utk.edu/cran/web/packages/rLiDAR/rLiDAR.pdf (accessed on 20 October 2020).
- R Core Team. R: A Language and Environment for Statistical Computing. 2013. Available online: https://www.r-project.org/ (accessed on 20 October 2020).
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Silverman, B.W. Density Estimation for Statistics and Data Analysis; Routledge: Boca Raton, FL, USA, 2018; ISBN 978-1-351-45617-3. [Google Scholar]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Lindberg, E.; Hollaus, M. Comparison of Methods for Estimation of Stem Volume, Stem Number and Basal Area from Airborne Laser Scanning Data in a Hemi-Boreal Forest. Remote Sens. 2012, 4, 1004–1023. [Google Scholar] [CrossRef]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local Maximum Filtering for the Extraction of Tree Locations and Basal Area from High Spatial Resolution Imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-Derived High-Density Point Clouds for Individual Tree Detection in Eucalyptus Plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Wide-Angle | DSLR |
|---|---|---|
| Number of images | 220 | 369 |
| Flying altitude (m) | 122 | 100 |
| Nominal front/side overlap | 90%/75% | 90%/70% |
| GSD (cm/pix) | 3.1 | 1.6 |
| Coverage area (ha) | 21 | 7.8 |
| Tie points | 202,622 | 14,314 |
| Projections | 742,332 | 53,713 |
| Reprojection error (pix) | 0.465 | 0.364 |
| Key point/tie point limit | 60,000/0 | |
| Dense point cloud quality | medium | |
| Depth filtering | disabled | |
| T | S | G | n | -------------------------------- DSLR ------------------------------ | ------------------------------ Wide-Angle ------------------------------ | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FP | FN | TP | re | p | F | FP | FN | TP | re | p | F | ||||
| - | B | G1 | 57 | 0 | 2 | 55 | 0.96 | 1 | 0.98 | 0 | 0 | 57 | 1 | 1 | 1 |
| - | B | G2 | 58 | 0 | 0 | 58 | 1 | 1 | 1 | 0 | 0 | 58 | 1 | 1 | 1 |
| - | B | G3 | 59 | 0 | 0 | 59 | 1 | 1 | 1 | 0 | 0 | 59 | 1 | 1 | 1 |
| - | B | G4 | 59 | 0 | 1 | 58 | 0.98 | 1 | 0.99 | 0 | 0 | 59 | 1 | 1 | 1 |
| 0 | N | G1 | 60 | 0 | 0 | 60 | 1 | 1 | 1 | 0 | 0 | 60 | 1 | 1 | 1 |
| 0 | N | G2 | 65 | 0 | 0 | 65 | 1 | 1 | 1 | 0 | 0 | 65 | 1 | 1 | 1 |
| 0 | N | G3 | 71 | 0 | 0 | 71 | 1 | 1 | 1 | 0 | 0 | 71 | 1 | 1 | 1 |
| 0 | N | G4 | 69 | 0 | 0 | 69 | 1 | 1 | 1 | 0 | 0 | 69 | 1 | 1 | 1 |
| 0 | N | G5 | 71 | 0 | 0 | 71 | 1 | 1 | 1 | 0 | 0 | 71 | 1 | 1 | 1 |
| 1 | N | G1 | 140 | 0 | 1 | 139 | 0.99 | 1 | 1 | 0 | 1 | 139 | 0.99 | 1 | 1 |
| 1 | N | G2 | 143 | 0 | 0 | 143 | 1 | 1 | 1 | 0 | 0 | 143 | 1 | 1 | 1 |
| 1 | N | G3 | 141 | 0 | 0 | 141 | 1 | 1 | 1 | 0 | 0 | 141 | 1 | 1 | 1 |
| 1 | N | G4 | 140 | 0 | 0 | 140 | 1 | 1 | 1 | 0 | 0 | 140 | 1 | 1 | 1 |
| 1 | N | G5 | 140 | 0 | 2 | 138 | 0.99 | 1 | 0.99 | 0 | 0 | 140 | 1 | 1 | 1 |
| 0 | W | G1 | 63 | 0 | 2 | 61 | 0.97 | 1 | 0.98 | 0 | 8 | 55 | 0.87 | 1 | 0.93 |
| 0 | W | G2 | 71 | 0 | 0 | 71 | 1 | 1 | 1 | 0 | 0 | 71 | 1 | 1 | 1 |
| 0 | W | G3 | 72 | 0 | 0 | 72 | 1 | 1 | 1 | 0 | 0 | 72 | 1 | 1 | 1 |
| 0 | W | G4 | 69 | 0 | 0 | 69 | 1 | 1 | 1 | 0 | 0 | 69 | 1 | 1 | 1 |
| 0 | W | G5 | 65 | 0 | 2 | 63 | 0.97 | 1 | 0.98 | 0 | 7 | 58 | 0.89 | 1 | 0.94 |
| 1 | W | G1 | 109 | 0 | 1 | 108 | 0.99 | 1 | 1 | 0 | 6 | 103 | 0.94 | 1 | 0.97 |
| 1 | W | G2 | 120 | 0 | 0 | 120 | 1 | 1 | 1 | 0 | 0 | 120 | 1 | 1 | 1 |
| 1 | W | G3 | 121 | 0 | 0 | 121 | 1 | 1 | 1 | 0 | 0 | 121 | 1 | 1 | 1 |
| 1 | W | G4 | 117 | 0 | 0 | 117 | 1 | 1 | 1 | 0 | 0 | 117 | 1 | 1 | 1 |
| 1 | W | G5 | 119 | 0 | 3 | 116 | 0.97 | 1 | 0.99 | 0 | 8 | 111 | 0.93 | 1 | 0.97 |
| Total | 2199 | 0 | 14 | 2185 | 0.99 | 1 | 1 | 0 | 30 | 2169 | 0.98 | 1 | 0.99 | ||
| T | S | G | n | ----------------------- Lidar --------------------- | -------------------- DSLR Camera ----------------- | ---------------- Wide-Angle Camera -------------- | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SWS | FWS | FP | FN | TP | re | p | F | SWS | FWS | FP | FN | TP | re | p | F | SWS | FWS | FP | FN | TP | re | p | F | ||||
| - | B | G1 | 57 | 5 × 5 | 7 × 7 | 1 | 10 | 47 | 0.82 | 0.98 | 0.90 | 3 × 3 | 7 × 7 | 1 | 11 | 46 | 0.81 | 0.98 | 0.88 | 5 × 5 | 7 × 7 | 4 | 7 | 50 | 0.88 | 0.93 | 0.90 |
| - | B | G2 | 58 | 5 × 5 | 7 × 7 | 0 | 0 | 58 | 1.00 | 1.00 | 1.00 | 3 × 3 | 7 × 7 | 1 | 2 | 56 | 0.97 | 0.98 | 0.97 | 5 × 5 | 7 × 7 | 6 | 4 | 54 | 0.93 | 0.90 | 0.92 |
| - | B | G3 | 59 | 5 × 5 | 7 × 7 | 2 | 5 | 54 | 0.92 | 0.96 | 0.94 | 3 × 3 | 7 × 7 | 3 | 7 | 52 | 0.88 | 0.95 | 0.91 | 5 × 5 | 7 × 7 | 7 | 10 | 49 | 0.83 | 0.88 | 0.85 |
| - | B | G4 | 59 | 5 × 5 | 7 × 7 | 0 | 2 | 57 | 0.97 | 1.00 | 0.98 | 3 × 3 | 7 × 7 | 4 | 3 | 56 | 0.95 | 0.93 | 0.94 | 5 × 5 | 7 × 7 | 12 | 9 | 50 | 0.85 | 0.81 | 0.83 |
| 0 | N | G1 | 60 | 5 × 5 | 7 × 7 | 0 | 0 | 60 | 1.00 | 1.00 | 1.00 | 3 × 3 | 7 × 7 | 0 | 2 | 58 | 0.97 | 1.00 | 0.98 | 5 × 5 | 7 × 7 | 5 | 7 | 53 | 0.88 | 0.91 | 0.90 |
| 0 | N | G2 | 65 | 5 × 5 | 7 × 7 | 0 | 2 | 63 | 0.97 | 1.00 | 0.98 | 3 × 3 | 7 × 7 | 0 | 5 | 60 | 0.92 | 1.00 | 0.96 | 5 × 5 | 7 × 7 | 7 | 4 | 61 | 0.94 | 0.90 | 0.92 |
| 0 | N | G3 | 71 | 5 × 5 | 7 × 7 | 3 | 4 | 67 | 0.94 | 0.96 | 0.95 | 3 × 3 | 7 × 7 | 6 | 5 | 66 | 0.93 | 0.92 | 0.92 | 5 × 5 | 7 × 7 | 7 | 12 | 59 | 0.83 | 0.89 | 0.86 |
| 0 | N | G4 | 69 | 5 × 5 | 7 × 7 | 1 | 3 | 66 | 0.96 | 0.99 | 0.97 | 3 × 3 | 7 × 7 | 3 | 4 | 65 | 0.94 | 0.96 | 0.95 | 5 × 5 | 7 × 7 | 17 | 9 | 60 | 0.87 | 0.78 | 0.82 |
| 0 | N | G5 | 71 | 5 × 5 | 7 × 7 | 1 | 4 | 67 | 0.94 | 0.99 | 0.96 | 3 × 3 | 7 × 7 | 3 | 2 | 69 | 0.97 | 0.96 | 0.97 | 5 × 5 | 7 × 7 | 14 | 5 | 66 | 0.93 | 0.83 | 0.87 |
| 1 | N | G1 | 140 | 5 × 5 | 7 × 7 | 7 | 10 | 130 | 0.93 | 0.95 | 0.94 | 3 × 3 | 7 × 7 | 3 | 31 | 109 | 0.78 | 0.97 | 0.87 | 5 × 5 | 7 × 7 | 6 | 29 | 111 | 0.79 | 0.95 | 0.86 |
| 1 | N | G2 | 143 | 5 × 5 | 7 × 7 | 2 | 2 | 141 | 0.99 | 0.99 | 0.99 | 3 × 3 | 7 × 7 | 3 | 11 | 132 | 0.92 | 0.98 | 0.95 | 5 × 5 | 7 × 7 | 8 | 16 | 127 | 0.89 | 0.94 | 0.91 |
| 1 | N | G3 | 141 | 5 × 5 | 7 × 7 | 1 | 7 | 134 | 0.95 | 0.99 | 0.97 | 3 × 3 | 7 × 7 | 6 | 26 | 115 | 0.82 | 0.95 | 0.88 | 5 × 5 | 7 × 7 | 8 | 43 | 98 | 0.70 | 0.92 | 0.79 |
| 1 | N | G4 | 140 | 5 × 5 | 7 × 7 | 2 | 8 | 132 | 0.94 | 0.99 | 0.96 | 3 × 3 | 7 × 7 | 5 | 10 | 130 | 0.93 | 0.96 | 0.95 | 5 × 5 | 7 × 7 | 14 | 16 | 124 | 0.89 | 0.90 | 0.89 |
| 1 | N | G5 | 140 | 5 × 5 | 7 × 7 | 1 | 10 | 130 | 0.93 | 0.99 | 0.96 | 3 × 3 | 7 × 7 | 0 | 25 | 115 | 0.82 | 1.00 | 0.90 | 5 × 5 | 7 × 7 | 16 | 24 | 116 | 0.83 | 0.88 | 0.85 |
| 0 | W | G1 | 63 | 9 × 9 | 9 × 9 | 0 | 3 | 60 | 0.95 | 1.00 | 0.98 | 7 × 7 | 7 × 7 | 0 | 3 | 60 | 0.95 | 1.00 | 0.98 | 9 × 9 | 9 × 9 | 0 | 42 | 21 | 0.33 | 1.00 | 0.50 |
| 0 | W | G2 | 71 | 9 × 9 | 9 × 9 | 0 | 0 | 71 | 1.00 | 1.00 | 1.00 | 7 × 7 | 7 × 7 | 2 | 0 | 71 | 1.00 | 0.97 | 0.99 | 9 × 9 | 9 × 9 | 6 | 0 | 71 | 1.00 | 0.92 | 0.96 |
| 0 | W | G3 | 72 | 9 × 9 | 9 × 9 | 1 | 0 | 72 | 1.00 | 0.99 | 0.99 | 7 × 7 | 7 × 7 | 10 | 0 | 72 | 1.00 | 0.88 | 0.94 | 9 × 9 | 9 × 9 | 5 | 6 | 66 | 0.92 | 0.93 | 0.92 |
| 0 | W | G4 | 69 | 9 × 9 | 9 × 9 | 0 | 1 | 68 | 0.99 | 1.00 | 0.99 | 7 × 7 | 7 × 7 | 2 | 1 | 68 | 0.99 | 0.97 | 0.98 | 9 × 9 | 9 × 9 | 5 | 2 | 67 | 0.97 | 0.93 | 0.95 |
| 0 | W | G5 | 65 | 9 × 9 | 9 × 9 | 0 | 3 | 62 | 0.95 | 1.00 | 0.98 | 7 × 7 | 7 × 7 | 1 | 5 | 60 | 0.92 | 0.98 | 0.95 | 9 × 9 | 9 × 9 | 0 | 21 | 44 | 0.68 | 1.00 | 0.81 |
| 1 | W | G1 | 109 | 9 × 9 | 9 × 9 | 0 | 1 | 108 | 0.99 | 1.00 | 1.00 | 7 × 7 | 7 × 7 | 0 | 5 | 104 | 0.95 | 1.00 | 0.98 | 9 × 9 | 9 × 9 | 1 | 27 | 82 | 0.75 | 0.99 | 0.85 |
| 1 | W | G2 | 120 | 9 × 9 | 9 × 9 | 0 | 0 | 120 | 1.00 | 1.00 | 1.00 | 7 × 7 | 7 × 7 | 0 | 1 | 119 | 0.99 | 1.00 | 1.00 | 9 × 9 | 9 × 9 | 4 | 19 | 101 | 0.84 | 0.96 | 0.90 |
| 1 | W | G3 | 121 | 9 × 9 | 9 × 9 | 0 | 0 | 121 | 1.00 | 1.00 | 1.00 | 7 × 7 | 7 × 7 | 1 | 0 | 121 | 1.00 | 0.99 | 1.00 | 9 × 9 | 9 × 9 | 8 | 5 | 116 | 0.96 | 0.94 | 0.95 |
| 1 | W | G4 | 117 | 9 × 9 | 9 × 9 | 1 | 2 | 115 | 0.98 | 0.99 | 0.99 | 7 × 7 | 7 × 7 | 3 | 3 | 114 | 0.97 | 0.97 | 0.97 | 9 × 9 | 9 × 9 | 8 | 3 | 114 | 0.97 | 0.93 | 0.95 |
| 1 | W | G5 | 119 | 9 × 9 | 9 × 9 | 0 | 2 | 117 | 0.98 | 1.00 | 0.99 | 7 × 7 | 7 × 7 | 0 | 8 | 111 | 0.93 | 1.00 | 0.97 | 9 × 9 | 9 × 9 | 1 | 55 | 64 | 0.54 | 0.98 | 0.70 |
| Total | 2199 | - | - | 23 | 79 | 2120 | 0.96 | 0.99 | 0.98 | - | - | 57 | 170 | 2029 | 0.93 | 0.97 | 0.95 | - | - | 169 | 375 | 1824 | 0.83 | 0.92 | 0.86 | ||
| Forked Trees Classified as FP | |||||||
|---|---|---|---|---|---|---|---|
| T | S | G | n | Forked Trees | Lidar | DSLR | Wide-Angle |
| - | B | G1 | 57 | 3 | 0 | 0 | 0 |
| - | B | G2 | 58 | 3 | 0 | 0 | 1 |
| - | B | G3 | 59 | 8 | 0 | 0 | 0 |
| - | B | G4 | 59 | 5 | 0 | 1 | 0 |
| 0 | N | G1 | 60 | 2 | 0 | 0 | 0 |
| 0 | N | G2 | 65 | 6 | 0 | 0 | 1 |
| 0 | N | G3 | 71 | 11 | 0 | 1 | 0 |
| 0 | N | G4 | 69 | 2 | 0 | 0 | 0 |
| 0 | N | G5 | 71 | 4 | 0 | 0 | 0 |
| 1 | N | G1 | 140 | 15 | 0 | 0 | 1 |
| 1 | N | G2 | 143 | 12 | 0 | 1 | 0 |
| 1 | N | G3 | 141 | 16 | 0 | 0 | 0 |
| 1 | N | G4 | 140 | 13 | 0 | 1 | 1 |
| 1 | N | G5 | 140 | 8 | 0 | 0 | 1 |
| 0 | W | G1 | 63 | 1 | 0 | 0 | 0 |
| 0 | W | G2 | 71 | 12 | 0 | 0 | 0 |
| 0 | W | G3 | 72 | 5 | 0 | 0 | 1 |
| 0 | W | G4 | 69 | 8 | 0 | 0 | 3 |
| 0 | W | G5 | 65 | 7 | 0 | 1 | 0 |
| 1 | W | G1 | 109 | 10 | 0 | 0 | 0 |
| 1 | W | G2 | 120 | 8 | 0 | 0 | 0 |
| 1 | W | G3 | 121 | 16 | 0 | 0 | 2 |
| 1 | W | G4 | 117 | 14 | 0 | 0 | 0 |
| 1 | W | G5 | 119 | 4 | 0 | 0 | 0 |
| Total | 2199 | 193 | 0 | 5 | 11 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramalho de Oliveira, L.F.; Lassiter, H.A.; Wilkinson, B.; Whitley, T.; Ifju, P.; Logan, S.R.; Peter, G.F.; Vogel, J.G.; Martin, T.A. Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates. Remote Sens. 2021, 13, 72. https://doi.org/10.3390/rs13010072
Ramalho de Oliveira LF, Lassiter HA, Wilkinson B, Whitley T, Ifju P, Logan SR, Peter GF, Vogel JG, Martin TA. Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates. Remote Sensing. 2021; 13(1):72. https://doi.org/10.3390/rs13010072
Chicago/Turabian StyleRamalho de Oliveira, Luiz Felipe, H. Andrew Lassiter, Ben Wilkinson, Travis Whitley, Peter Ifju, Stephen R. Logan, Gary F. Peter, Jason G. Vogel, and Timothy A. Martin. 2021. "Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates" Remote Sensing 13, no. 1: 72. https://doi.org/10.3390/rs13010072
APA StyleRamalho de Oliveira, L. F., Lassiter, H. A., Wilkinson, B., Whitley, T., Ifju, P., Logan, S. R., Peter, G. F., Vogel, J. G., & Martin, T. A. (2021). Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates. Remote Sensing, 13(1), 72. https://doi.org/10.3390/rs13010072