Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance



Abstract
1. Introduction
2. Materials and Methods
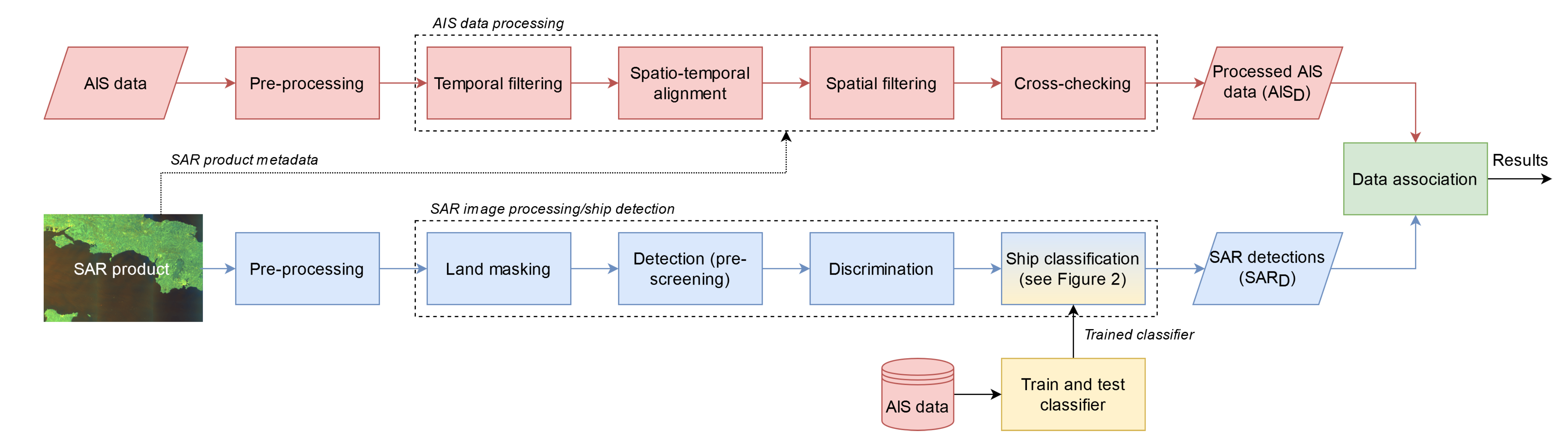
2.1. Ship Detection
2.2. AIS Data Processing
- Temporal filtering:
- (a)
- The AIS dataset is first filtered to the acquisition date of the SAR image and then further filtered to a time interval, X, centred on the sensing start time of the SAR image, . This defines a time range of . Ideally, a time interval is selected which allows for the interpolation between at least two positions (for a given ship). However, this is non-trivial as ships often do not comply with the technical standard [58]. This means selecting a time interval based on the maximum reporting interval of AIS is unsuitable. Instead, the time interval is empirically determined based on the average reporting interval for the area of interest.
- Spatio-temporal alignment:
- (a)
- A cubic Hermite spline interpolation is applied to the track of each ship to determine its position (in latitude and in longitude), Speed Over Ground (SOG) and Course Over Ground (COG) at . A track is the history of a ship’s location and is generated by aggregating positions with the same unique Maritime Mobile Service Identity (MMSI) number. If a track cannot be generated (i.e., only a single position is available), then no interpolation is carried out.
- (b)
- Azimuth image shift compensation is carried out on the AIS data. The azimuth shift, in metres, for a moving ship is given bywhere H is the satellite (or SAR) altitude in metres, is the interpolated SOG of the ship in metres per second, is the SAR incidence angle extracted at the AIS-reported position in degrees, is the interpolated COG of the ship relative to the SAR range direction in degrees and V is the magnitude of the satellite velocity in metres per second. The AIS-reported position of the ship is then reckoned by the calculated azimuth shift in its opposite relative azimuth direction.
- Spatial filtering:
- (a)
- The dataset is filtered again according to the spatial extent (or footprint) of the SAR image.
- (b)
- AIS data located within the SAR land mask (including the 250 m buffer) are also removed.
- Cross-checking:
- (a)
- The AIS dataset is cross-checked against an open ship database (e.g., ShipAIS [59]) to verify the accuracy of the static data (i.e., length, width and ship type). Missing or invalid entries are also updated using the International Maritime Organization (IMO) number to form a more complete dataset for data association. (Note that, if the IMO number is not available, then the MMSI number is used instead.)
2.3. Ship Classification
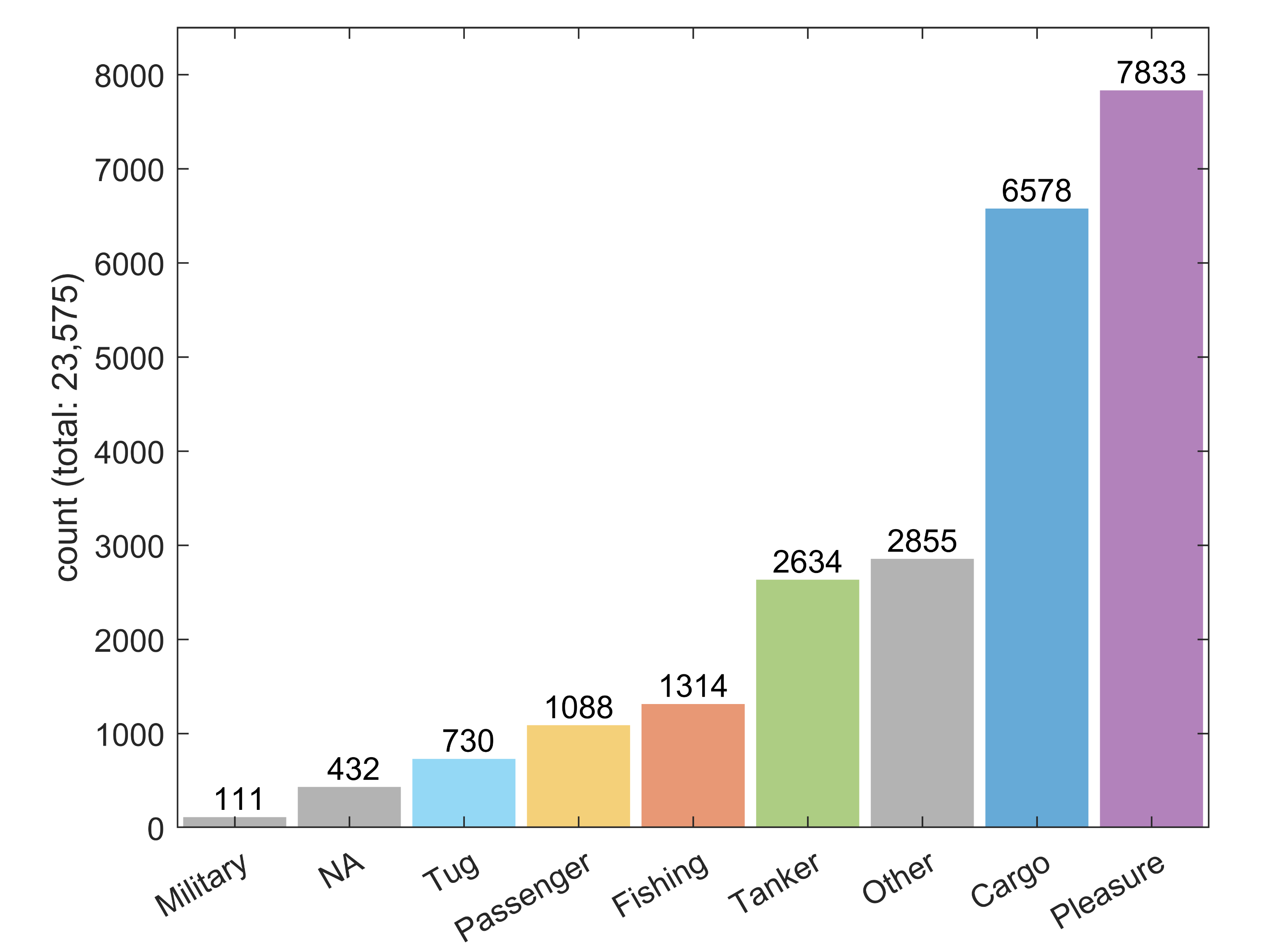
- Import data: The training data () are imported from an AIS database. The database is typically formed from historical/archive AIS data.
- Preprocess data: The training data are preprocessed by removing anomalous, missing, invalid and duplicated entries that may negatively affect the training of the model.
- Feature selection: Relevant features (or predictors) for use in training the model are selected (see Table 2). Importantly, since a transfer learning method is used, the selected features from the AIS data are limited to what can also be extracted and/or derived from the SAR ship detections.
- Feature engineering: New features are derived to improve the predictive power of the model.
- Train model(s): Multiple classification algorithms are iteratively trained and tested based on the selected and derived features in order to find the best model that predicts the type of ship.
- Export model: The best trained model is exported to make ship type predictions on new data (i.e., SAR ship detections, ). These predictions are subsequently used in the data association.
2.4. Data Association
3. Results
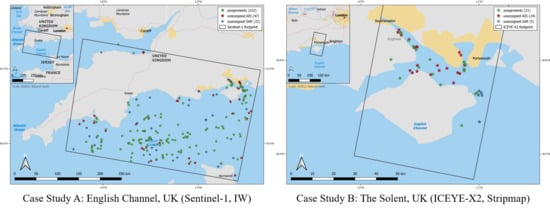
3.1. Case Study A: English Channel, UK
3.1.1. Product Details
3.1.2. Ship Detection
3.1.3. AIS Data Processing
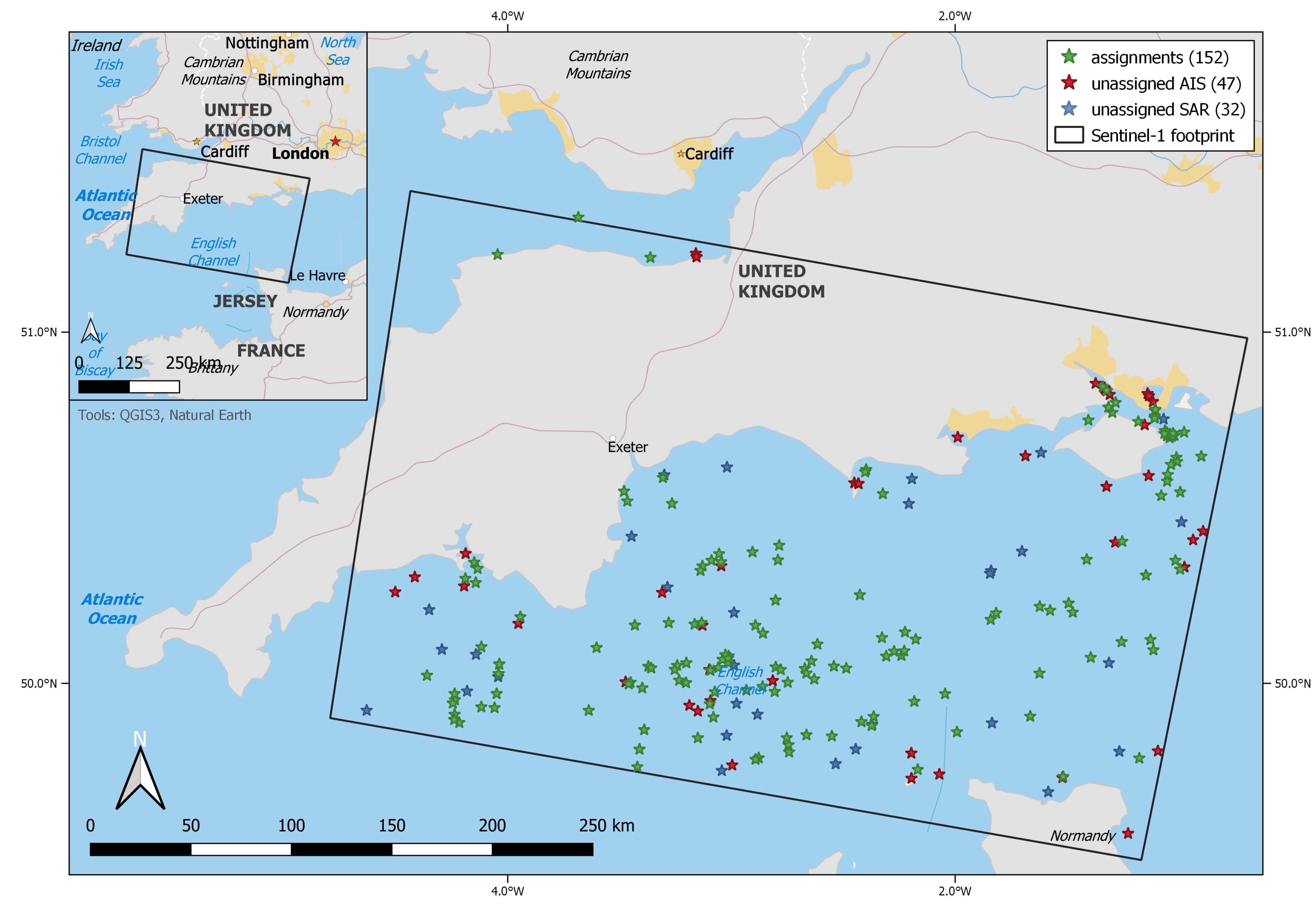
3.1.4. Classification-Aided Data Association
- Four (4) are due to a discrepancy between the SAR footprint and the SAR image. The main reason is the SAR image contains noise (or artefacts) at its borders (visible in Figure 7). (This noise is common to Sentinel-1 Level-1 GRD products after being processed from RAW data.) The extent of the SAR footprint includes these areas of border noise where AIS data points may be located but no SAR detections.
- Seven (7) are unsuccessfully interpolated to , meaning their true positions have a greater associated uncertainty and are less likely to be assigned.
- 11 are moored to structures such as piers and oil terminals located within ports and harbours (located outside the land mask). These structures merge with or deform the SAR signature in such a way that leads to no SAR detection.
- 20 are either below the selected SUMO detection threshold or have a very weak SAR signature that is below the limit of detectability of the SAR sensor. These are generally small ships. For example, the average ship length of the 20 unassigned AIS data points is 16.3 m where most are fishing vessels.
3.2. Case Study B: The Solent, UK
3.2.1. Product Details
3.2.2. Ship Detection
3.2.3. AIS Data Processing
3.2.4. Classification-Aided Data Association
4. Discussion
4.1. Effectiveness of Rank-Ordered Assignment
4.2. Effectiveness of Ship Classification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ITU Radiocommunication Sector (ITU-R). Technical Characteristics for an Automatic Identification System Using Time-Division Multiple Access in the Vhf Maritime Mobile Band; Recommendation ITU-R M.1371-5; International Telecommunication Union (ITU): Geneva, Switzerland, 2014. [Google Scholar]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship Surveillance With TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Vachon, P.W.; Kabatoff, C.; Quinn, R. Operational Ship Detection in Canada using RADARSAT. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 998–1001. [Google Scholar] [CrossRef]
- Velotto, D.; Bentes, C.; Tings, B.; Lehner, S. First, Comparison of Sentinel-1 and TerraSAR-X Data in the Framework of Maritime Targets Detection: South Italy Case. IEEE J. Ocean. Eng. 2016, 41, 993–1006. [Google Scholar] [CrossRef]
- Santamaria, C.; Alvarez, M.; Greidanus, H.; Syrris, V.; Soille, P.; Argentieri, P. Mass Processing of Sentinel-1 Images for Maritime Surveillance. Remote Sens. 2017, 9, 678. [Google Scholar] [CrossRef]
- Lehner, S.; Brusch, S.; Fritz, T. Ship Surveillance by Joint Use of SAR and AIS. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Posada, M.; Greidanus, H.; Alvarez, M.; Vespe, M.; Cokacar, T.; Falchetti, S. Maritime Awareness for Counter-piracy in the Gulf of Aden. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 249–252. [Google Scholar] [CrossRef]
- Longépé, N.; Hajduch, G.; Ardianto, R.; de Joux, R.; Nhunfat, B.; Marzuki, M.I.; Fablet, R.; Hermawan, I.; Germain, O.; Subki, B.A.; et al. Completing fishing monitoring with spaceborne Vessel Detection System (VDS) and Automatic Identification System (AIS) to assess illegal fishing in Indonesia. Mar. Pollut. Bull. 2018, 131, 33–39. [Google Scholar] [CrossRef] [PubMed]
- Rowlands, G.; Brown, J.; Soule, B.; Boluda, P.T.; Rogers, A.D. Satellite surveillance of fishing vessel activity in the Ascension Island Exclusive Economic Zone and Marine Protected Area. Mar. Policy 2019, 101, 39–50. [Google Scholar] [CrossRef]
- Kurekin, A.A.; Loveday, B.R.; Clements, O.; Quartly, G.D.; Miller, P.I.; Wiafe, G.; Adu Agyekum, K. Operational Monitoring of Illegal Fishing in Ghana through Exploitation of Satellite Earth Observation and AIS Data. Remote Sens. 2019, 11, 293. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Seto, K.; Hochberg, T.; Wong, B.A.; Miller, N.A.; Takasaki, K.; Kubota, H.; Oozeki, Y.; Doshi, S.; et al. Illuminating dark fishing fleets in North Korea. Sci. Adv. 2020, 6. [Google Scholar] [CrossRef]
- Uiboupin, R.; Raudsepp, U.; Sipelgas, L. Detection of Oil Spills on SAR Images, Identification of Polluters and Forecast of the Slicks Trajectory. In Proceedings of the 2008 IEEE/OES US/EU-Baltic International Symposium, Tallinn, Estonia, 27–29 May 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Longépé, N.; Mouche, A.; Goacolou, M.; Granier, N.; Carrere, L.; Lebras, J.; Lozach, P.; Besnard, S. Polluter identification with spaceborne radar imagery, AIS and forward drift modeling. Mar. Pollut. Bull. 2015, 101, 826–833. [Google Scholar] [CrossRef]
- Garello, R.; Kerbaol, V. Oil Pollution Monitoring: An Integrated Approach. In Proceedings of the 2017 IEEE Workshop on Environmental Energy, and Structural Monitoring Systems (EESMS), Milan, Italy, 24–25 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- English, J.; Hewitt, R.; Power, D.; Tunaley, J. ICE-SAIS—Space-based AIS and SAR for improved Ship and Iceberg Monitoring. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Marino, A.; Hajnsek, I. Statistical Tests for a Ship Detector Based on the Polarimetric Notch Filter. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4578–4595. [Google Scholar] [CrossRef]
- Touzi, R.; Vachon, P.W. RCM Polarimetric SAR for Enhanced Ship Detection and Classification. Can. J. Remote Sens. 2015, 41, 473–484. [Google Scholar] [CrossRef]
- Iervolino, P.; Guida, R. A Novel Ship Detector Based on the Generalized-Likelihood Ratio Test for SAR Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3616–3630. [Google Scholar] [CrossRef]
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.X.; Kourti, N.; Argentieri, P. The SUMO Ship Detector Algorithm for Satellite Radar Images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef]
- Sandirasegaram, N.; Vachon, P.W. Validating Targets Detected by SAR Ship Detection Engines. Can. J. Remote Sens. 2017, 43, 451–454. [Google Scholar] [CrossRef]
- Pelich, R.; Chini, M.; Hostache, R.; Matgen, P.; Lopez-Martinez, C.; Nuevo, M.; Ries, P.; Eiden, G. Large-Scale Automatic Vessel Monitoring Based on Dual-Polarization Sentinel-1 and AIS Data. Remote Sens. 2019, 11, 1078. [Google Scholar] [CrossRef]
- Margarit, G.; Barba Milanés, J.A.; Tabasco, A. Operational Ship Monitoring System Based on Synthetic Aperture Radar Processing. Remote Sens. 2009, 1, 375–392. [Google Scholar] [CrossRef]
- Margarit, G.; Tabasco, A. Ship Classification in Single-Pol SAR Images Based on Fuzzy Logic. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3129–3138. [Google Scholar] [CrossRef]
- Xing, X.; Ji, K.; Zou, H.; Chen, W.; Sun, J. Ship Classification in TerraSAR-X Images With Feature Space Based Sparse Representation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1562–1566. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Wu, F.; Jiang, S.; Zhang, B.; Tang, Y. A Novel Hierarchical Ship Classifier for COSMO-SkyMed SAR Data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 484–488. [Google Scholar] [CrossRef]
- Fernandez Arguedas, V.; Velotto, D.; Tings, B.; Greidanus, H.; Bentes da Silva, C.A. Ship Classification in High and Very High Resolution Satellite SAR Imagery. In Proceedings of the Security Research Conference, 11th Future Security, Berlin, Germany, 13–14 September 2016; pp. 347–354. [Google Scholar]
- Jiang, M.; Yang, X.; Dong, Z.; Fang, S.; Meng, J. Ship Classification Based on Superstructure Scattering Features in SAR Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 616–620. [Google Scholar] [CrossRef]
- Huang, L.; Liu, B.; Li, B.; Guo, W.; Yu, W.; Zhang, Z.; Yu, W. OpenSARShip: A Dataset Dedicated to Sentinel-1 Ship Interpretation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 195–208. [Google Scholar] [CrossRef]
- Hou, X.; Ao, W.; Song, Q.; Lai, J.; Wang, H.; Xu, F. FUSAR-Ship: Building a high-resolution SAR-AIS matchup dataset of Gaofen-3 for ship detection and recognition. Sci. China Inf. Sci. 2020, 63. [Google Scholar] [CrossRef]
- Song, J.; Kim, D.J.; Kang, K.M. Automated Procurement of Training Data for Machine Learning Algorithm on Ship Detection Using AIS Information. Remote Sens. 2020, 12, 1443. [Google Scholar] [CrossRef]
- Grasso, R.; Mirra, S.; Baldacci, A.; Horstmann, J.; Coffin, M.; Jarvis, M. Performance Assessment of a Mathematical Morphology Ship Detection Algorithm for SAR Images through Comparison with AIS Data. In Proceedings of the 2009 Ninth International Conference on Intelligent Systems Design and Applications, Pisa, Italy, 30 November–2 December 2009; pp. 602–607. [Google Scholar] [CrossRef]
- Gurgel, K.; Schlick, T.; Horstmann, J.; Maresca, S. Evaluation of an HF-radar Ship Detection and Tracking Algorithm by Comparison to AIS and SAR Data. In Proceedings of the 2010 International WaterSide Security Conference, Carrara, Italy, 3–5 November 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Chaturvedi, S.K.; Yang, C.S.; Ouchi, K.; Shanmugam, P. Ship Recognition by Integration of SAR and AIS. J. Navig. 2012, 65, 323–337. [Google Scholar] [CrossRef]
- Mazzarella, F.; Alessandrini, A.; Greidanus, H.; Alvarez, M.; Argentieri, P.; Nappo, D.; Ziemba, L. Data Fusion for Wide-area Maritime Surveillance. In Proceedings of the COST MOVE Workshop on Moving Objects at Sea, Brest, France, 27–28 June 2013; pp. 27–28. [Google Scholar]
- Voinov, S.; Schwarz, E.; Krause, D.; Berg, M. Identification of SAR Detected Targets on Sea in Near Real Time Applications for Maritime Surveillance. In Proceedings of the Free and Open Source Software for Geospatial (FOSS4G) Conference, Bonn, Germany; 24–26 August 2016; Volume 16. [Google Scholar] [CrossRef]
- Mazzarella, F.; Vespe, M.; Santamaria, C. SAR Ship Detection and Self-Reporting Data Fusion Based on Traffic Knowledge. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1685–1689. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Ji, Y.; Wang, L.; Zhang, J. Multi-Feature Maximum Likelihood Association with Space-borne SAR, HFSWR and AIS. J. Navig. 2017, 70, 359–378. [Google Scholar] [CrossRef]
- Blackman, S.S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House: Norwood, MA, USA, 1999. [Google Scholar]
- Bar-Shalom, Y.; Blair, W.D. Multitarget-Multisensor Tracking: Applications and Advances; Artech House: Norwood, MA, USA, 2000; Volume 3. [Google Scholar]
- Zhao, Z.; Ji, K.; Xing, X.; Zou, H.; Zhou, S. Ship Surveillance by Integration of Space-borne SAR and AIS – Further Research. J. Navig. 2014, 67, 295–309. [Google Scholar] [CrossRef]
- Zhao, Z.; Ji, K.F.; Xing, X.W.; Zou, H.X. Effective Association of SAR and AIS Data Using Non-Rigid Point Pattern Matching. IOP Conf. Ser. Earth Environ. Sci. 2014, 17, 012258. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, L.; Xiong, W.; Zhou, Z. GF-4 Satellite and Automatic Identification System Data Fusion for Ship Tracking. IEEE Geosci. Remote Sens. Lett. 2019, 16, 281–285. [Google Scholar] [CrossRef]
- Rodger, M.; Guida, R. Data Association Techniques for Near-Contemporaneous SAR and AIS Datasets from NovaSAR-1. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 700–703. [Google Scholar] [CrossRef]
- Vachon, P.W.; English, R.A.; Wolfe, J. Validation of RADARSAT-1 vessel signatures with AISLive data. Can. J. Remote Sens. 2007, 33, 20–26. [Google Scholar] [CrossRef]
- Surrey Satellite Technology Limited (SSTL). NovaSAR-1: Launched 2018. Available online: https://www.sstl.co.uk/space-portfolio/launched-missions/2010-2018/novasar-1 (accessed on 26 October 2020).
- EoPortal. PAZ SAR Satellite Mission of Spain. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/p/paz (accessed on 26 October 2020).
- Canadian Space Agency. RADARSAT Constellation Mission. Available online: http://www.asc-csa.gc.ca/eng/satellites/radarsat/default.asp (accessed on 26 October 2020).
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- Ouchi, K. On the multilook images of moving targets by synthetic aperture radars. IEEE Trans. Antennas Propag. 1985, 33, 823–827. [Google Scholar] [CrossRef]
- Lin, I.I.; Khoo, V. Computer-based Algorithm for Ship Detection from ERS SAR Imagery. In Proceedings of the Third ERS Symposium on Space at the Service of our Environment, Florence, Italy, 14–21 March 1997; Volume 414, pp. 1411–1416. [Google Scholar]
- Ouchi, K.; Iehara, M.; Morimura, K.; Kumano, S.; Takami, I. Nonuniform azimuth image shift observed in the Radarsat images of ships in motion. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2188–2195. [Google Scholar] [CrossRef]
- Vachon, P.; English, R.; Wolfe, J. Ship Signatures in RADARSAT-1 ScanSAR Narrow B Imagery: Analysis with AISLive Data; Technical Report; Defence Research and Development Canada (DRDC): Ottawa, ON, Canada, 2007. [Google Scholar]
- Lang, H.; Wu, S.; Xu, Y. Ship Classification in SAR Images Improved by AIS Knowledge Transfer. IEEE Geosci. Remote Sens. Lett. 2018, 15, 439–443. [Google Scholar] [CrossRef]
- Snapir, B.; Waine, T.W.; Biermann, L. Maritime Vessel Classification to Monitor Fisheries with SAR: Demonstration in the North Sea. Remote Sens. 2019, 11, 353. [Google Scholar] [CrossRef]
- Murty, K.G. An Algorithm for Ranking all the Assignments in Order of Increasing Cost. Oper. Res. 1968, 16, 682–687. [Google Scholar] [CrossRef]
- Jonker, R.; Volgenant, A. A shortest augmenting path algorithm for dense and sparse linear assignment problems. Computing 1987, 38, 325–340. [Google Scholar] [CrossRef]
- Greidanus, H.; Argentieri, P.; Alvarez, M.; Santamaria, C.; Kourti, N. The SUMO Ship Detection Software for Satellite Radar Images—Short Installation and User Guide; Technical Report; Joint Research Centre (JRC): Ispra, Italy, 2017. [Google Scholar]
- Last, P.; Bahlke, C.; Hering-Bertram, M.; Linsen, L. Comprehensive Analysis of Automatic Identification System (AIS) Data in Regard to Vessel Movement Prediction. J. Navig. 2014, 67, 791–809. [Google Scholar] [CrossRef]
- ShipAIS. Available online: http://www.shipais.com/ (accessed on 26 October 2020).
- Rodger, M.; Guida, R. SAR and AIS Data Fusion for Dense Shipping Environments. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Virtual Symposium, 26 September–2 October 2020. [Google Scholar]
- Seiffert, C.; Khoshgoftaar, T.M.; Van Hulse, J.; Napolitano, A. RUSBoost: Improving Classification Performance when Training Data are Skewed. In Proceedings of the 2008 19th International Conference on Pattern Recognition, Tampa, FL, USA, 8–11 December 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Chawla, N.V.; Lazarevic, A.; Hall, L.O.; Bowyer, K.W. SMOTEBoost: Improving Prediction of the Minority Class in Boosting. In Knowledge Discovery in Databases: PKDD 2003; Lavrač, N., Gamberger, D., Todorovski, L., Blockeel, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 107–119. [Google Scholar]
- Stasolla, M.; Greidanus, H. The exploitation of Sentinel-1 images for vessel size estimation. Remote Sens. Lett. 2016, 7, 1219–1228. [Google Scholar] [CrossRef]
- Greidanus, H. Sub-aperture Behavior of SAR Signatures of Ships. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 3579–3582. [Google Scholar] [CrossRef]
- Schubert, A.; Miranda, N.; Geudtner, D.; Small, D. Sentinel-1A/B Combined Product Geolocation Accuracy. Remote Sens. 2017, 9, 607. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, X.; Meng, J. A Small Ship Target Detection Method Based on Polarimetric SAR. Remote Sens. 2019, 11, 2938. [Google Scholar] [CrossRef]
- Li, B.; Liu, B.; Guo, W.; Zhang, Z.; Yu, W. Ship Size Extraction for Sentinel-1 Images Based on Dual-Polarization Fusion and Nonlinear Regression: Push Error Under One Pixel. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4887–4905. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Algorithm (detector) | CFAR (K-distribution) |
| Nominal false alarm rate | |
| Land mask | OpenStreetMap (250 m buffer) |
| Detection threshold adjustment | 1.8 (VV) 1.5 (VH) |
| Parameter | Description |
|---|---|
| Feature selection (input features) | Ship length (l) Ship width (w) |
| Feature engineering (derived features) | Length-to-width aspect ratio () Width-to-length aspect ratio () |
| Response | Ship type (six classes):
|
| Algorithm | RUSBoost [61] |
| Model assessment method | k-fold cross-validation (k = 10) |
| Model results | Value |
| Accuracy | 68.6% |
| Total misclassification cost | 6340 |
| Prediction speed (approx.) | 41,000 obs/s |
| Training time * | 16.367 s |
| Model parameters | Value |
| Preset | RUSBoosted Trees |
| Ensemble method | RUSBoost |
| Learner type | Decision tree |
| Max. number of splits | 20 |
| Number of learners | 50 |
| Learning rate | 0.1 |
| Validation | 10-fold cross-validation |
| Confidence | Length, l | Width, w | Ship Type |
|---|---|---|---|
| Low | F | F | F |
| Medium | T | F | F |
| F | T | F | |
| F | F | T | |
| High | T | T | F |
| T | F | T | |
| F | T | T | |
| Very High | T | T | T |
| Parameter | Description |
|---|---|
| Datetime (UTC) | 2017-10-24T06:23:21.314Z |
| Instrument | SAR-C |
| Mode | IW |
| Satellite | Sentinel-1A |
| Spatial resolution | 20 × 22 m (range × azimuth) |
| Pass direction | Descending |
| Polarisation | VV VH |
| Product level | Level-1 |
| Product type | GRD |
| Product identifier | S1A_IW_GRDH_1SDV_20171024T062321_20171024T062346_ 018951_02006B_BCA8 |
| Before | After | Change (%) | |||
|---|---|---|---|---|---|
| Data Field | # Missing | % of Total | # Missing | % of Total | |
| Length | 38 | 19.2 | 14 | 7.1 | −12.1 |
| Width | 42 | 21.2 | 18 | 9.1 | −12.1 |
| Ship type | 28 | 14.1 | 6 | 3.0 | −11.1 |
| Total | 184 | 199 |
| Assigned | 152 | |
| % of Total | 82.6 | 76.4 |
| Unassigned | 32 | 47 |
| % of Total | 17.4 | 23.6 |
| Assigned | Feature | # of matches |
| 152 | Length (valid: 146) | 55 (37.7%) |
| Width (valid: 141) | 129 (91.5%) | |
| Ship type (valid: 135) | 34 (25.2%) | |
| Parameter | Description |
|---|---|
| Datetime (UTC) | 2020-10-30T10:43:22.739 |
| Mode | Stripmap |
| Satellite | ICEYE-X2 |
| Spatial resolution | 3 × 3 m (range × azimuth) |
| Pass direction | Descending |
| Polarisation | VV |
| Product type | GRD |
| Product identifier | ICEYE_X2_GRD_SM_36769_20201030T104322 |
| Parameter | Description |
|---|---|
| Application | SNAP (version 7.0) |
| Calibration | Output sigma0 band |
| Land mask | OpenStreetMap (50 m buffer) |
| Algorithm (detector) | Two-parameter CFAR |
| Adaptive thresholding | Target Window Size (m): 20 Guard Window Size (m): 500 Background Window Size (m): 800 PFA: |
| Object discrimination | Object dimension threshold: Min. Target Size (m): 10 Max. Target Size (m): 600 |
| Total | 26 | 45 |
| Assigned | 21 | |
| % of Total | 80.8 | 46.7 |
| Unassigned | 5 | 24 |
| % of Total | 19.2 | 53.3 |
| Assigned | Feature | # of matches |
| 21 | Length (valid: 20) | 18 (90.0%) |
| Width (valid: 20) | 18 (90.0%) | |
| Ship type (valid: 17) | 13 (76.5%) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodger, M.; Guida, R. Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance. Remote Sens. 2021, 13, 104. https://doi.org/10.3390/rs13010104
Rodger M, Guida R. Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance. Remote Sensing. 2021; 13(1):104. https://doi.org/10.3390/rs13010104
Chicago/Turabian StyleRodger, Maximilian, and Raffaella Guida. 2021. "Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance" Remote Sensing 13, no. 1: 104. https://doi.org/10.3390/rs13010104
APA StyleRodger, M., & Guida, R. (2021). Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance. Remote Sensing, 13(1), 104. https://doi.org/10.3390/rs13010104