Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach



Abstract
1. Introduction
2. Study Area and Data Sources
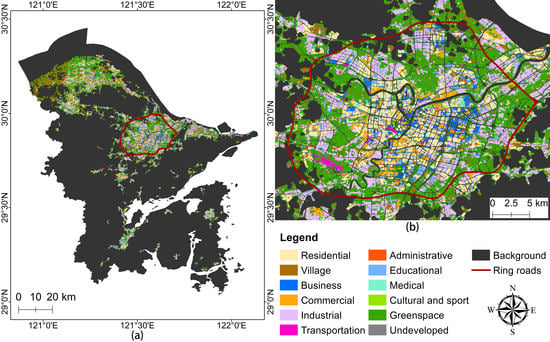
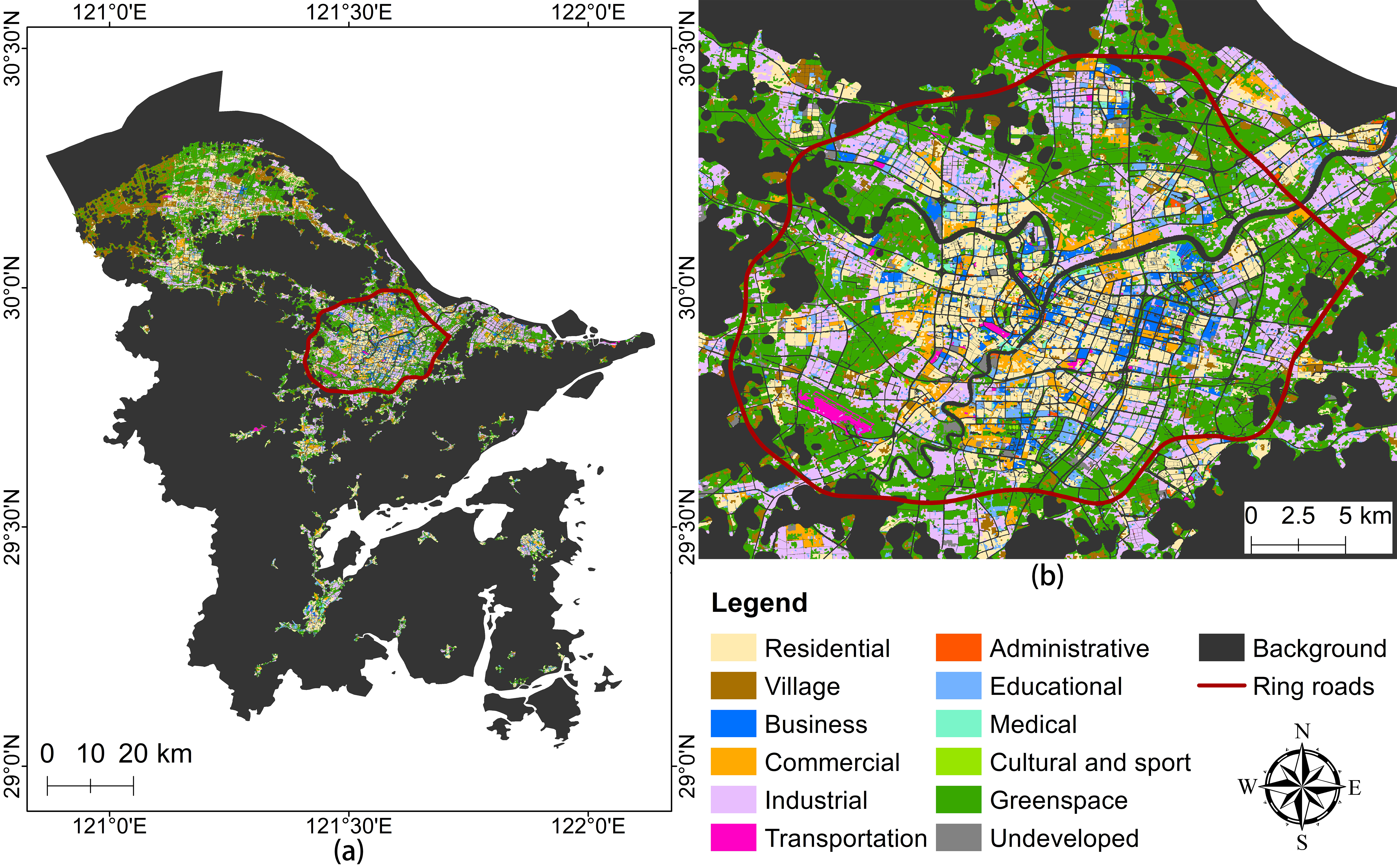
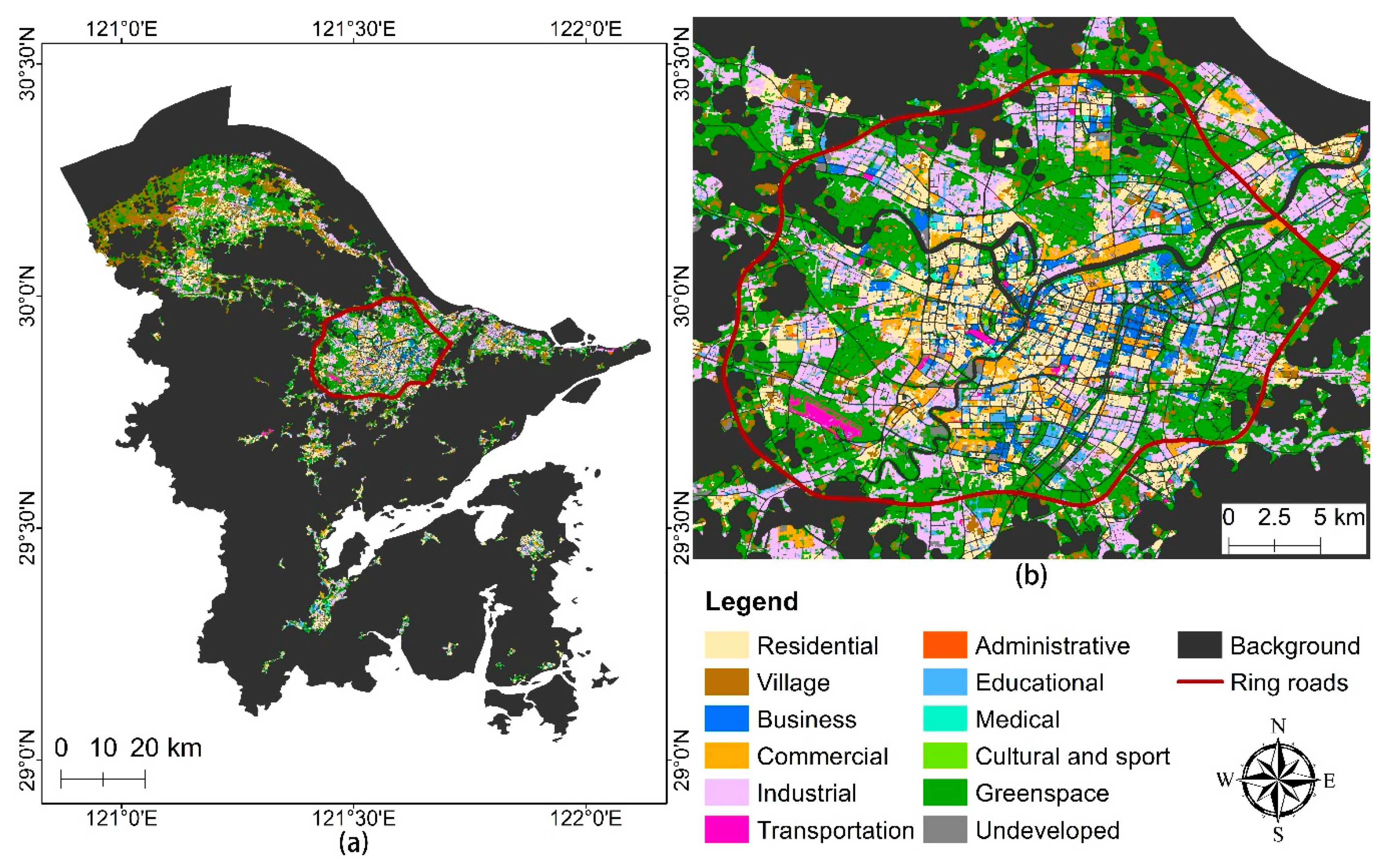
2.1. Study Area
2.2. Data Sources
2.2.1. Sentinel-1 SAR and Sentinel-2 Optical Imagery
2.2.2. Baidu Points of Interest (POIs)
2.2.3. Luojia-1 Nighttime Lights
2.2.4. WorldPop Data
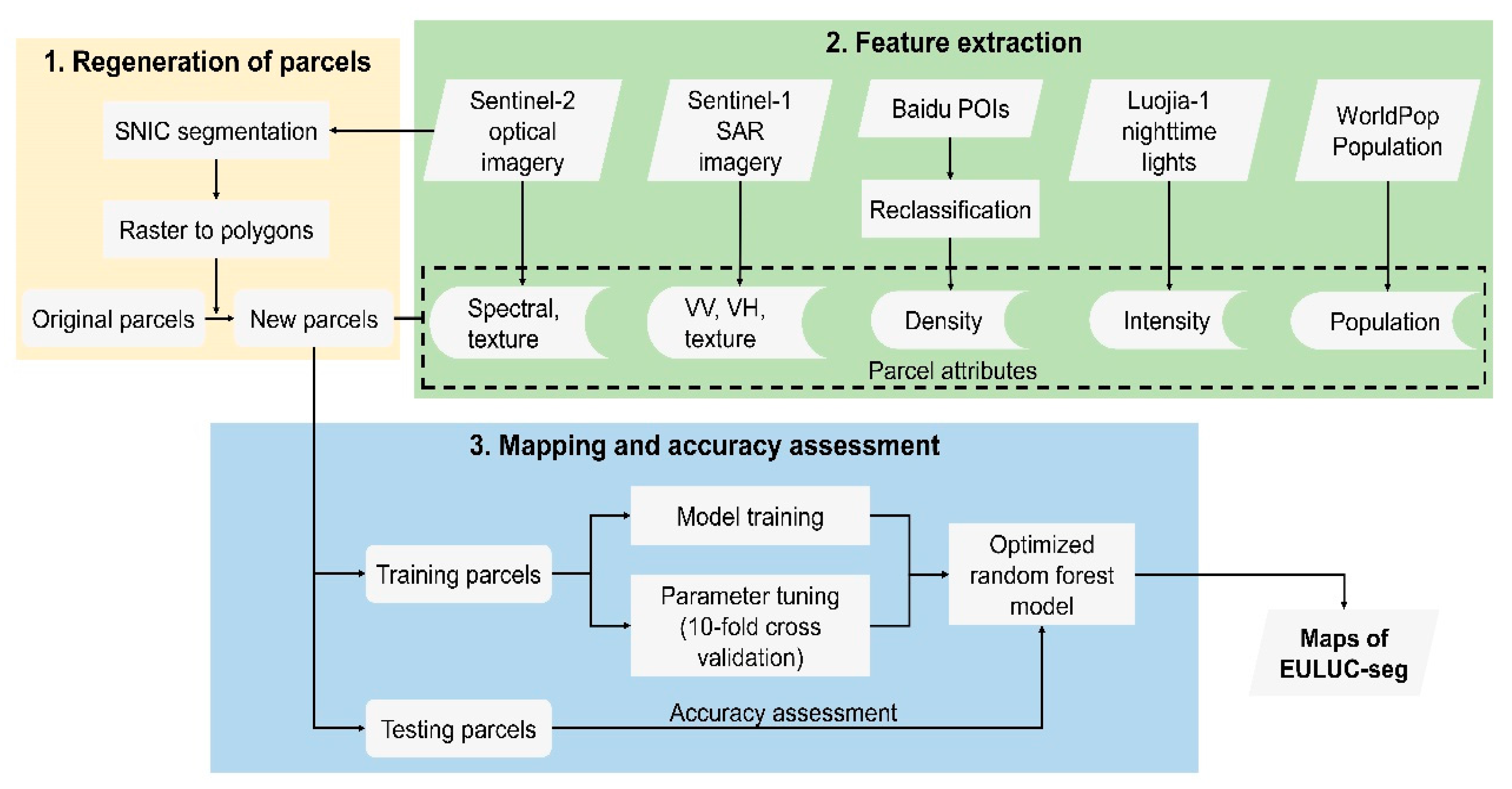
3. Proposed Method
3.1. Regeneration of Parcels
3.2. Feature Extraction
3.3. Mapping and Accuracy Assessment
3.3.1. Redefinition of Classification System
3.3.2. Samples for Training and Testing
3.3.3. Random Forest Model
4. Results
4.1. Classification Results
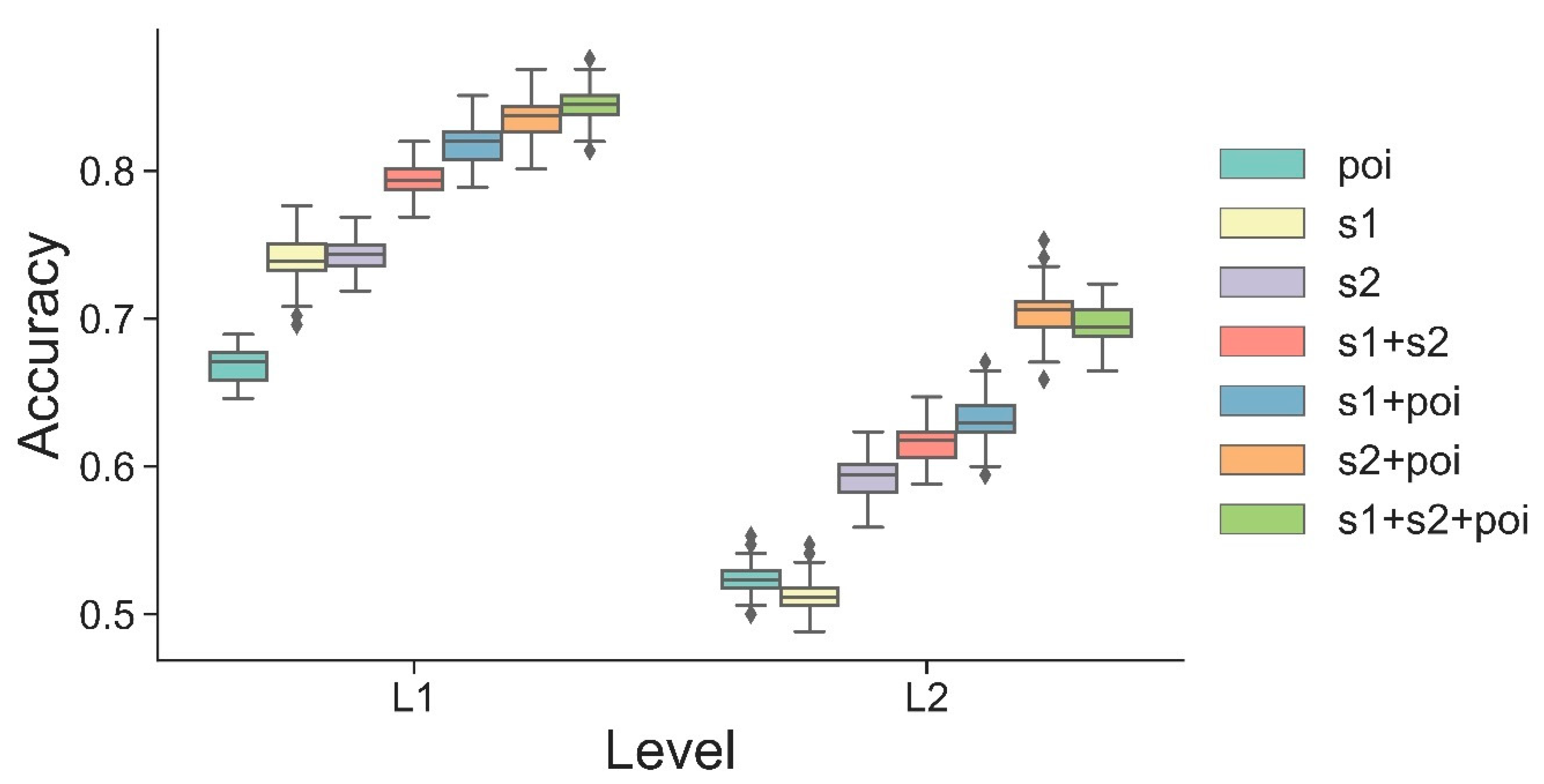
4.2. Importance of Feature Categories
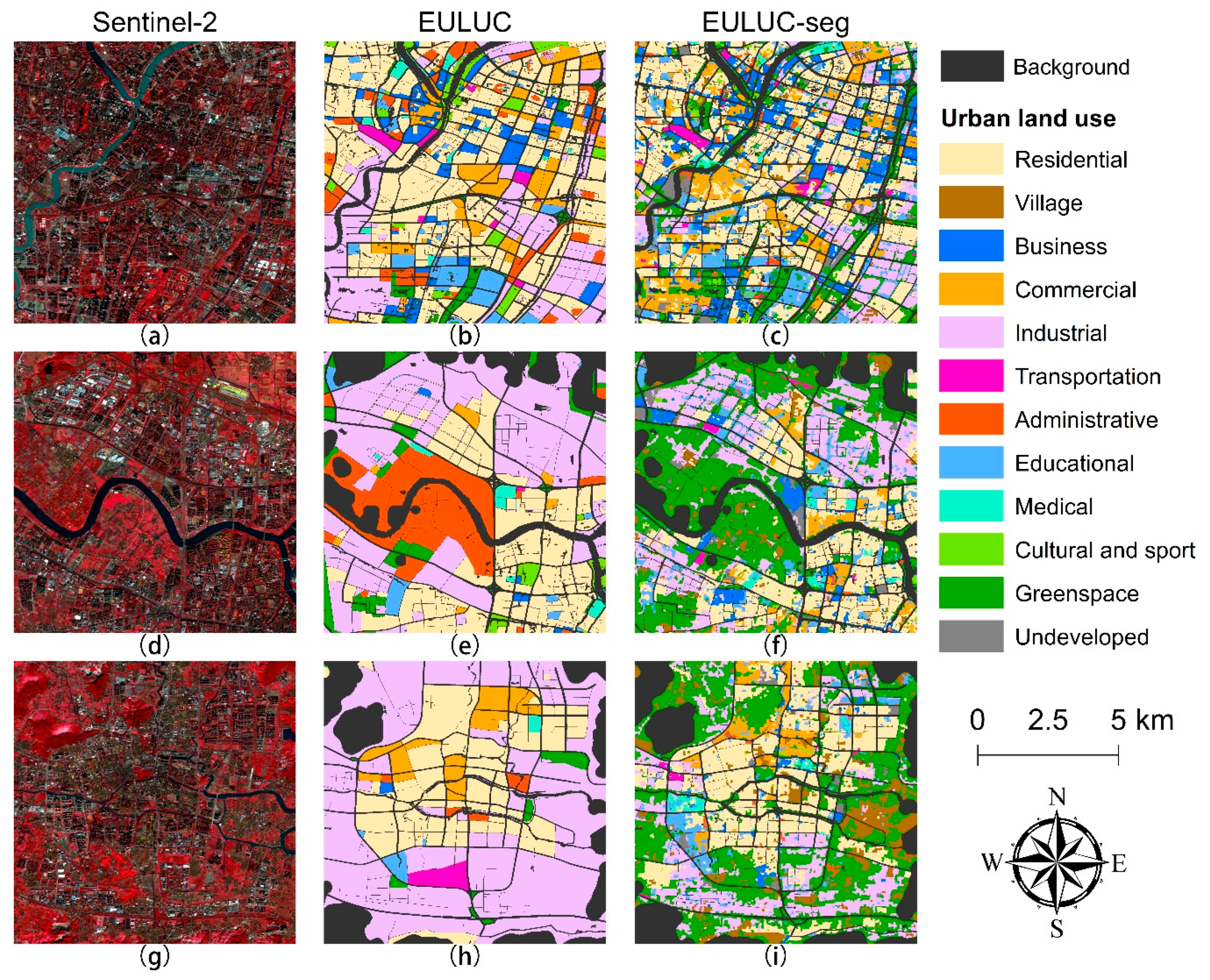
4.3. Comparison with EULUC Mapping Results
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gong, P.; Chen, B.; Li, X.; Liu, H.; Wang, J.; Bai, Y.; Chen, J.; Chen, X.; Fang, L.; Feng, S.; et al. Mapping essential urban land use categories in China (EULUC-China): Preliminary results for 2018. Sci. Bull. 2019, 65, 182–187. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.; Huang, H.; Wu, W.; Du, X.; Wang, H. The combined use of remote sensing and social sensing data in fine-grained urban land use mapping: A case study in Beijing, China. Remote Sens. 2017, 9, 865. [Google Scholar] [CrossRef]
- Du, S.; Du, S.; Liu, B.; Zhang, X.; Zheng, Z. Large-scale urban functional zone mapping by integrating remote sensing images and open social data. GIScience Remote Sens. 2020, 57, 1–20. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote Sens. 2008, 29, 3119–3135. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef]
- Liu, S.; Qi, Z.; Li, X.; Yeh, A.G.-O. Integration of convolutional neural networks and object-based post-classification refinement for land use and land cover mapping with optical and sar data. Remote Sens. 2019, 11, 690. [Google Scholar] [CrossRef]
- Ruiz Hernandez, I.E.; Shi, W. A Random Forests classification method for urban land-use mapping integrating spatial metrics and texture analysis. Int. J. Remote Sens. 2018, 39, 1175–1198. [Google Scholar] [CrossRef]
- Gong, P.; Marceau, D.J.; Howarth, P.J. A comparison of spatial feature extraction algorithms for land-use classification with SPOT HRV data. Remote Sens. Environ. 1992, 40, 137–151. [Google Scholar] [CrossRef]
- Xu, B.; Gong, P.; Seto, E.; Spear, R. Comparison of gray-level reduction and different texture spectrum encoding methods for land-use classification using a panchromatic IKONOS image. Photogramm. Eng. Remote Sens. 2003, 69, 529–536. [Google Scholar] [CrossRef]
- Herold, M.; Liu, X.; Clarke, K. Spatial metrics and image texture for mapping urban land use. Photogramm. Eng. Remote Sens. 2003, 69, 991–1001. [Google Scholar] [CrossRef]
- Wu, S.-S.; Qiu, X.; Usery, E.L.; Wang, L. Using geometrical, textural, and contextual information of land parcels for classification of detailed urban land use. Ann. Assoc. Am. Geogr. 2009, 99, 76–98. [Google Scholar] [CrossRef]
- Hu, S.; Wang, L. Automated urban land-use classification with remote sensing. Int. J. Remote Sens. 2013, 34, 790–803. [Google Scholar] [CrossRef]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hawaii Convention Center, Honolulu, HI, USA, 21–26 July 2017; pp. 4651–4660. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Louis, J.; Debaecker, V.; Pflug, B.; Main-Knorn, M.; Bieniarz, J.; Mueller-Wilm, U.; Cadau, E.; Gascon, F. Sentinel-2 Sen2Cor: L2A processor for users. In Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, 9–13 May 2016; pp. 1–8. [Google Scholar]
- Tatem, A.J. WorldPop, open data for spatial demography. Sci. Data 2017, 4, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable classification with limited sample: Transferring a 30-m resolution sample set collected in 2015 to mapping 10-m resolution global land cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef]
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping urban land use by using landsat images and open social data. Remote Sens. 2016, 8, 151. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Features | Count |
|---|---|---|
| Sentinel-1 | Mean of VV and VH | 2 |
| Standard deviation of VV and VH | 2 | |
| Textures of VV and VH | 12 | |
| Sentinel-2 | Mean of blue, green, red, near-infrared bands, NDVI, and NDWI | 6 |
| Standard deviation of blue, green, red, near-infrared bands, NDVI, and NDWI | 6 | |
| Textures of blue, green, red, and near-infrared bands | 24 | |
| Baidu POIs | Total number of all POIs | 1 |
| Total number of each type of POIs | 9 | |
| Proportion of each type of POIs | 9 | |
| Luojia-1 | Mean of DN values | 1 |
| Sum of DN values | 1 | |
| WorldPop | Mean of population | 1 |
| Sum of population | 1 | |
| / | Area of each parcel | 1 |
| Level I | Level II |
|---|---|
| 01 Residential | 0101 Residential |
| 0102 Village | |
| 02 Commercial | 0201 Business |
| 0202 Commercial | |
| 03 Industrial | 0301 Industrial |
| 04 Transportation | 0401 Transportation |
| 05 Public | 0501 Administrative |
| 0502 Educational | |
| 0503 Medical | |
| 0504 Sport and cultural | |
| 0505 Greenspace | |
| 0506 Undeveloped |
| Residential | Commercial | Industrial | Public | UA | PA | |
|---|---|---|---|---|---|---|
| Residential | 45 | 0 | 0 | 2 | 95.74% | 91.84% |
| Commercial | 0 | 19 | 2 | 3 | 79.17% | 73.08% |
| Industrial | 0 | 0 | 10 | 1 | 90.91% | 76.92% |
| Public | 4 | 7 | 1 | 67 | 84.81% | 91.78% |
| OA = 87.58%, kappa coefficient = 0.81 | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, Y.; Chen, B.; Zhang, T.; Xu, B. Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach. Remote Sens. 2020, 12, 1058. https://doi.org/10.3390/rs12071058
Tu Y, Chen B, Zhang T, Xu B. Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach. Remote Sensing. 2020; 12(7):1058. https://doi.org/10.3390/rs12071058
Chicago/Turabian StyleTu, Ying, Bin Chen, Tao Zhang, and Bing Xu. 2020. "Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach" Remote Sensing 12, no. 7: 1058. https://doi.org/10.3390/rs12071058
APA StyleTu, Y., Chen, B., Zhang, T., & Xu, B. (2020). Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach. Remote Sensing, 12(7), 1058. https://doi.org/10.3390/rs12071058