1. Introduction
The mapping of forest disturbances is an important component in sustainable forest management and in implementing climate policy initiatives, such as the UN’s Reducing Emissions from Deforestation and Forest Degradation (REDD+) programme. In this paper, we use the term forest disturbance as an umbrella term for all forest changes that result from both deforestation and from forest degradation. According to both FAO and UNFCCC, deforestation is a conversion from forest land to non-forest land. Since, in many cases, we do not know the future fate of the disturbance patches, we cannot further classify them. Instead, the analysis of this study puts a focus on the size of the detected disturbance patches. Today, remote sensing applications are widely used to monitor tropical forests and their changes at large spatial scales. Most tropical forest monitoring systems are based on optical data sets and focus on large-deforestation areas, for which user accuracies around 90% and producer accuracies above 75% are reported [
1,
2,
3]. In addition, recent developments have led to automated forest monitoring systems that are based on medium to high spatial resolution Earth Observation (EO) data and allow tracking forest changes in near real-time (NRT), such as Global Forest Watch Alerts for the humid tropical forests [
4] and the DETER system in Brazil [
5]. While methods for large area deforestation monitoring have improved considerably over the last years, there still is a lack of methods that accurately detect forest degradation and small forest changes. Forest degradation is thought to be a major source of carbon emissions [
6], and thus needs to be better understood and integrated in REDD+ Monitoring & Measurement, Reporting and Verification (MRV) systems. A key driver of forest degradation is timber extraction by selective logging, where only a small subset of trees is harvested. The intensity of selective logging varies, depending on the amount of wood that is harvested, but usually the individual patches of change are small. Other less prominent drivers of forest degradation in developing countries include fuelwood collection and charcoal production, uncontrolled fire, and livestock grazing [
7]. To accurately detect small patches of forest disturbance from selective logging and other degradation drivers, EO data of both high spatial and temporal resolution is required because gaps left by e.g., individual tree extraction are very small and quickly overgrow in tropical climates. EO data that have the potential to map forest degradation are now available: the Sentinel missions provide data at 10 m spatial resolution both in the optical and Synthetic Aperture Radar (SAR) domain and data are provided every five to 12 days.
Apart from rapid forest regrowth, tropical forest disturbance mapping with optical data is also limited by the number of available cloud-free observations. C-band SAR data from the Sentinel-1 mission (central frequency of 5.404 GHz) can be acquired independent of weather conditions and daytime, leading to very dense time series of EO data. The two-satellite constellation of Sentinel-1 has a potential six-day exact repeat cycle, but the tropical regions are only covered by one satellite, leading to a 12-day repeat cycle. Some tropical areas are only covered by one descending or one ascending orbit. Information on revisit frequency and the available pass directions can be obtained from the Sentinel-1 observation scenario from ESA (
https://sentinel.esa.int/web/sentinel/missions/sentinel-1/observation-scenario). By combining the vast amounts of new EO data from the Sentinel-1 (S-1), Sentinel-2 (S-2), and Landsat 8 (L8) missions, it is possible to strongly increase the temporal density of available EO data and additionally exploit multi-sensor information for forest monitoring. The Sentinel-2 constellation and Landsat 8 have repeat cycles of five days and 16 days, respectively. Together, these two missions provide up to eight images per month for tropical regions and strongly increase the temporal density of image time series. However, the number of usable cloud-free observations is site specific as it strongly depends on regional cloud cover. An assessment of available Landsat 7 and 8 images for Peru showed that, on average, less than 50% of all potential observations are cloud-free observations and cloud cover has significant intra-annual and regional variation [
8]. The combination of all available cloud-free optical observations and SAR data allows to develop near real-time forest disturbance mapping systems at high spatial resolution, which can be used to more accurately detect small scale forest disturbances.
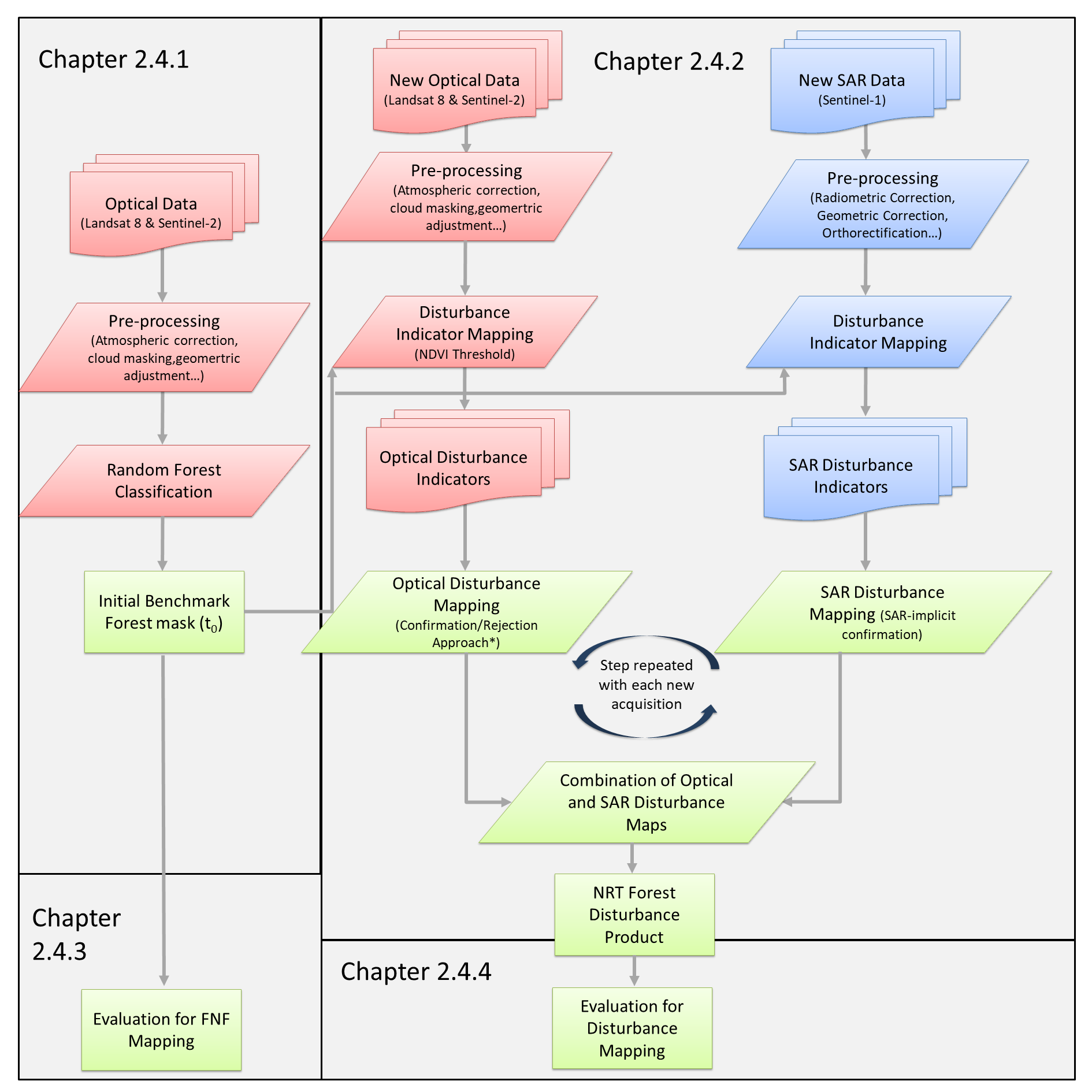
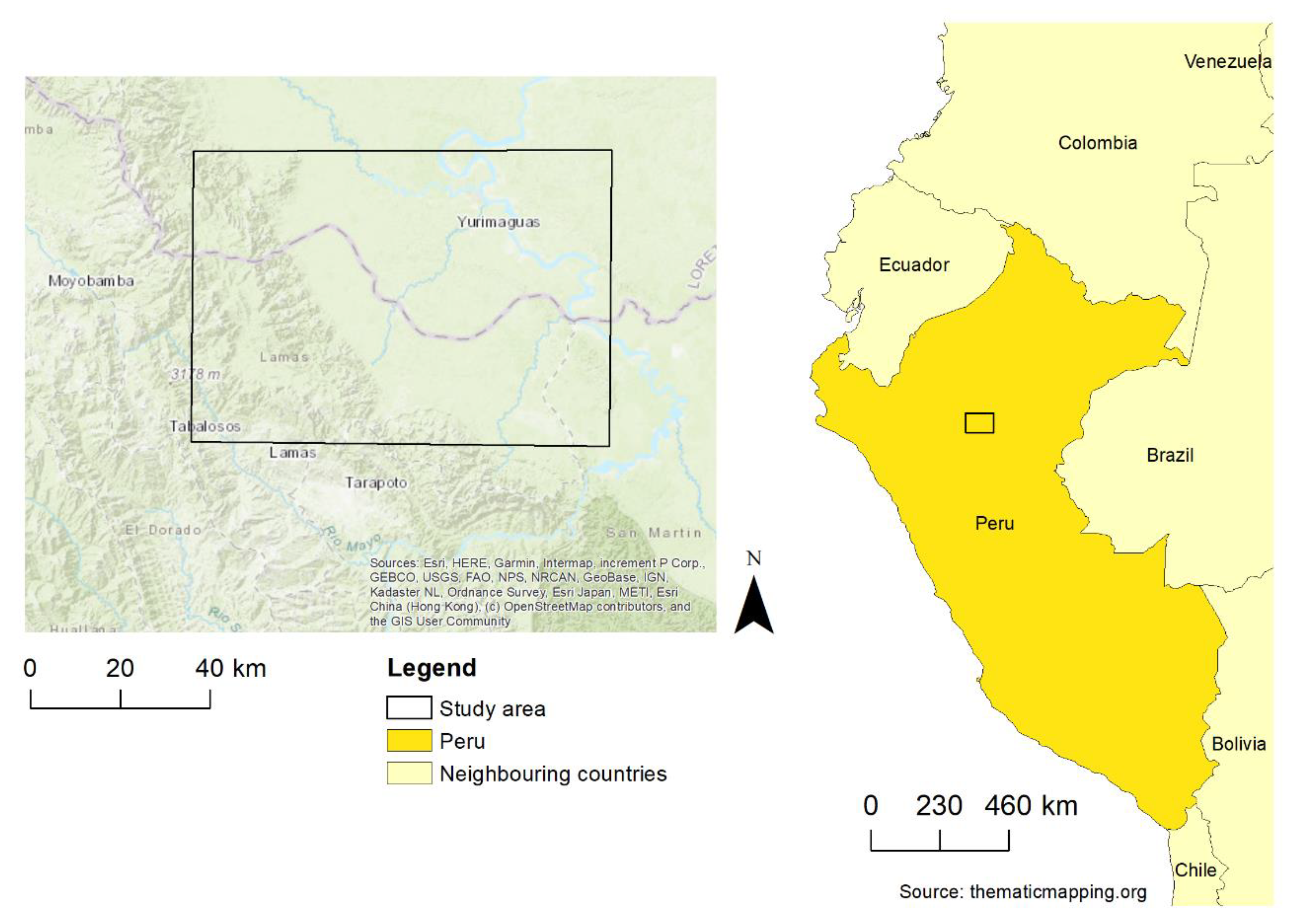
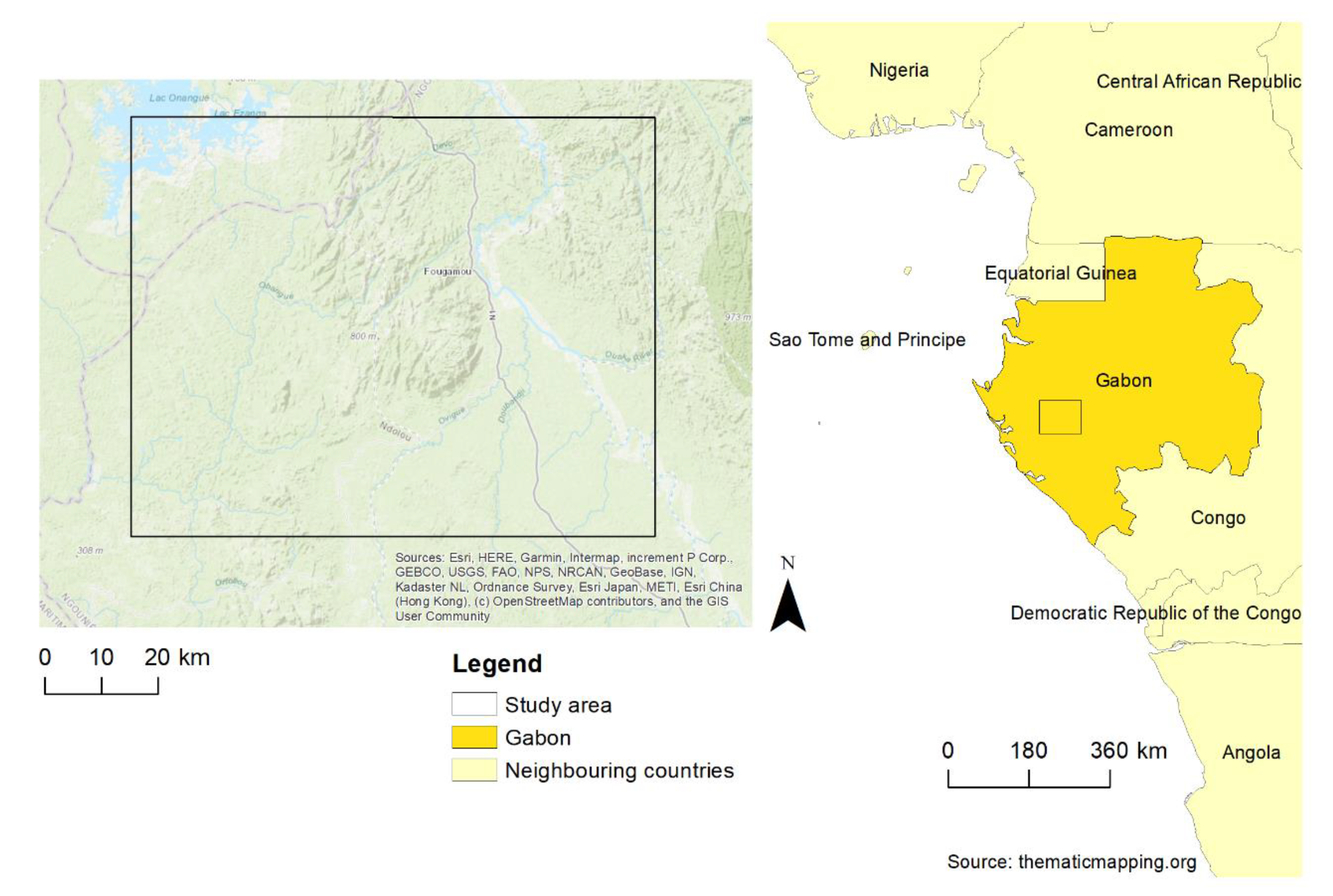
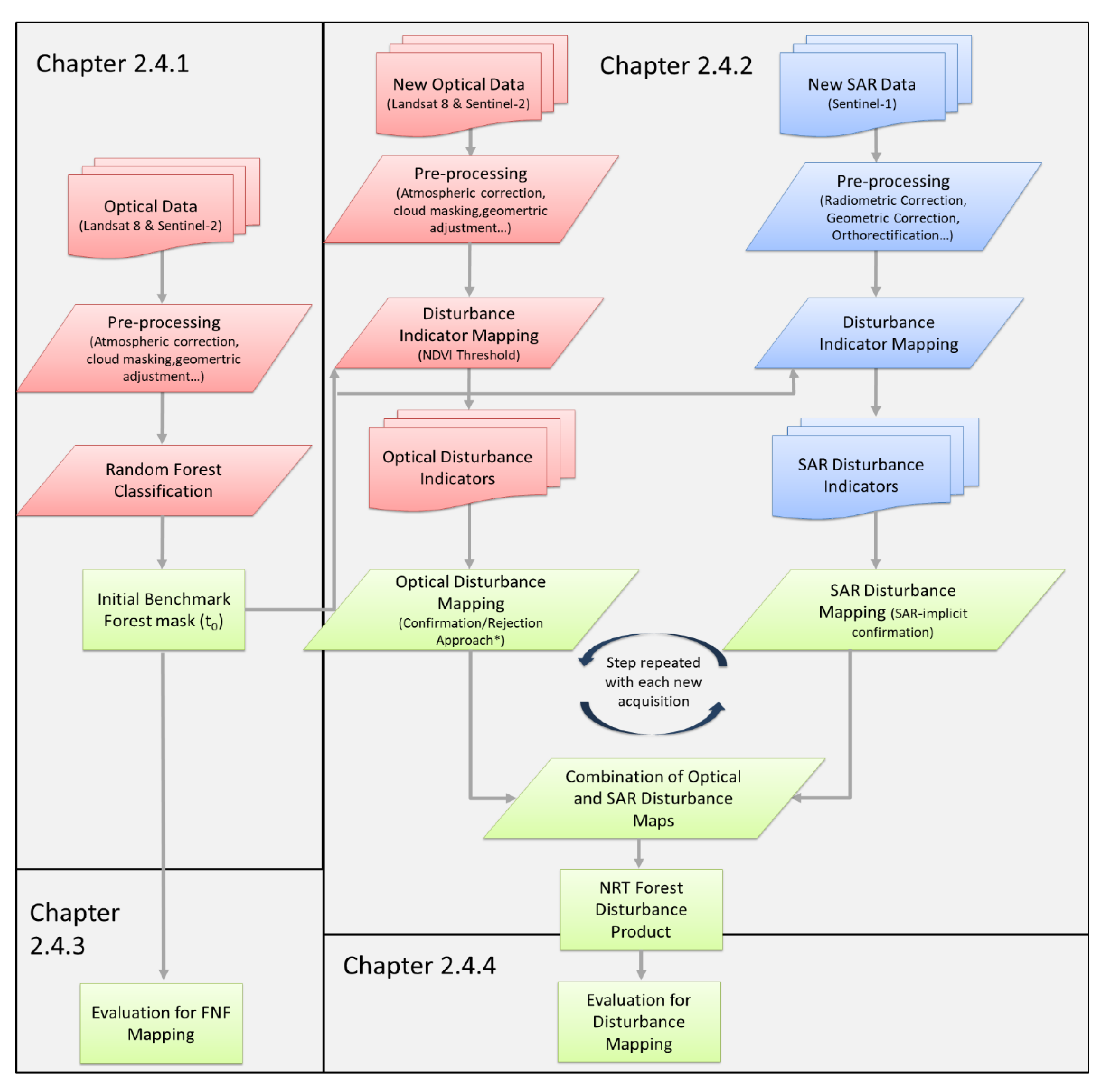
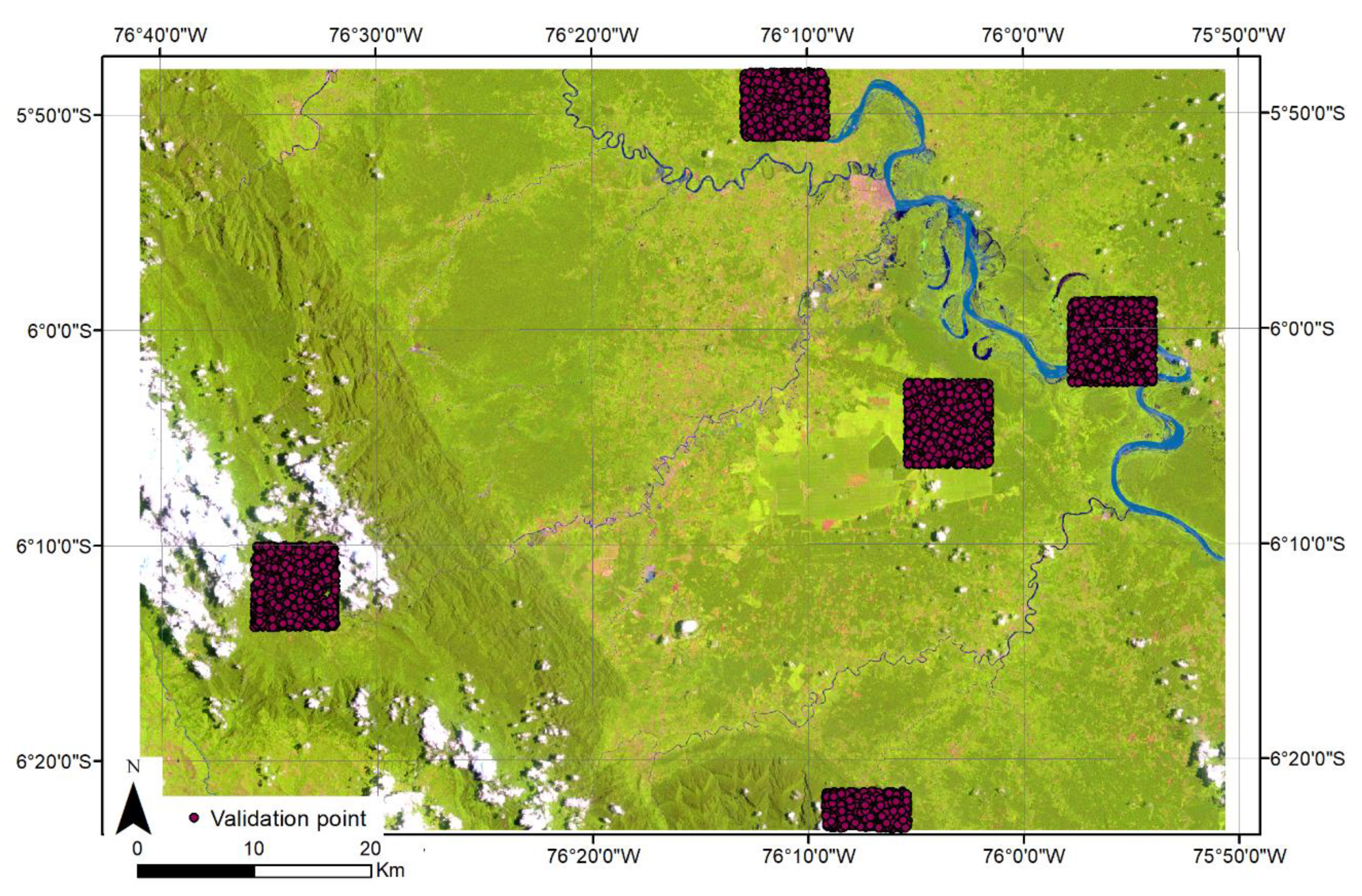
The aim of this study is to analyze if the joint use of SAR (S-1) and optical (S-2 and L8) time series data in forest monitoring approaches can increase forest disturbance detection accuracies in the humid tropics. Forest disturbance maps from SAR and optical data are highly complementary, in that they detect different disturbed forest areas. Therefore, the assumption was that higher accuracy values can be obtained by merging detections from both sensor types. In this study, we demonstrate this at two humid tropical forest test sites located in Peru and in Gabon. Our approach includes the generation of a benchmark forest/non-forest mask, which serves as the starting point for the forest disturbance mapping. Separate forest disturbance maps are then calculated from the SAR and optical time series. The final forest disturbance maps combine the forest disturbance results from SAR and optical time series by a simple union process. The benchmark forest/non-forest masks and all the forest disturbance maps (SAR, optical, combined) are validated with a set of sample plots that were visually interpreted in VHR and HR imagery.
State-of-the-Art
Forest Disturbance Monitoring with Optical Data
The opening of the U.S. Geological Survey (USGS) Landsat data archive in 2008 [
9] and the launch of new satellite missions with an open data policy, such as ESA’s Sentinel Missions [
10], has formed the basis for time series analysis of optical satellite data at high spatial and high temporal resolution [
9,
11,
12,
13]. Although the Sentinel-2 Multi Spectral Instrument (MSI) and the Landsat 8 Operational Land Imager (OLI) bands are not fully compatible in terms of radiometry, recent investigations on radiometric consistency between the two sensors revealed a high correlation between corresponding bands. Dense optical image time series allow for developing new Land Use and Land Cover (LULC) mapping approaches and novel methods for detecting dynamic and gradual, as well as long-term, change processes.
Satellite systems that operate at daily acquisition [
14] rates, such as MODIS, can achieve consistent temporal coverage, even in tropical regions. But small disturbances are largely omitted due to the coarse spatial resolution of 250–500 m [
15]. Many different algorithms have been proposed to detect forest changes while using time series of medium spatial resolution optical satellite imagery [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25]. In the last decade, yearly deforestation mapping and the derivation of deforestation rates have become operational at global [
1] and national level e.g., [
2,
16,
17], but there is still only fragmented information available on the extent and magnitude of small forest disturbance and forest degradation [
18]. As stated in the GOFC-GOLD REDD sourcebook [
19], measuring forest degradation or forest regrowth and related forest carbon stock changes is more challenging than measuring deforestation alone, since degradation monitoring requires more frequent and better imagery and processing.
Cloud cover strongly influences tropical forest disturbance detection accuracies in both space and time [
4]. When there are temporal gaps in the time series, rapid vegetation recovery can obscure the signs of disturbance events [
20]. Previous studies using multiple years of cloud-free Landsat data in less cloudy regions showed that the regrowth of trees rapidly masks the spectral signature, even of forest clear cuts [
21,
22]. Thus, a higher percentage of forest disturbances can only be detected with dense time series of optical data. Dense time series are essential for the continued development of near real-time monitoring systems, such as the Global Forest Watch Humid Tropical Forest Alerts [
8], and can provide much needed alert information on location and exact timing of illegal logging activities [
23].
In terms of methodology, we can divide the time series analysis methods that were used for forest change detection into four broad categories: (1) threshold based change detection; (2) curve fitting; (3) trajectory fitting; and, (4) trajectory segmentation. Existing algorithms often use a combination of these categories. A more detailed description and comparison of these categories can be found in [
24]. Thresholding procedures that separate forest from non-forest or intact from degraded forest in a time series are used in the Vegetation Change Tracker (VCT) and Global Forest Watch algorithm [
8,
25]. Curve fitting approaches for monitoring forest dynamics have been applied in several studies [
26,
27]. A large number of forest monitoring approaches today are based on trajectory fitting and trajectory segmentation. Most of the disturbance types show a distinct temporal behavior before and after a degradation event, resulting in a “characteristic spectro-temporal signature” that can be exploited to detect and classify forest changes [
22]. Trajectory fitting and segmentation algorithms include LandTrendr, Breaks For Additive Season, and Trend (BFAST) and the Continuous Change Detection and Classification (CCDC) algorithm [
28,
29,
30,
31]. The dense time series of satellite data also allow to detect forest disturbances from harmonic regression models. The Exponentially Weighted Moving Average Change Detection (EWMACD) algorithm and its evolution, the dynamic algorithm Edyn [
32,
33], use the residuals from harmonic regression over many years of Landsat data in conjunction with statistical quality control charts to signal vegetation changes. As a conclusion from the literature review, we can state that algorithms that try to detect lesser-magnitude or small-scale disturbances show higher levels of commission error.
Forest Disturbance Monitoring with SAR data
SAR-based forest monitoring approaches are among the most promising remote sensing approaches for the NRT mapping of forest disturbances in the tropics, thanks to the ability of SAR to operate in all weather conditions at any time of day or night. However, SAR data based approaches for forest disturbance mapping have not been well developed yet and operational applications have not yet been implemented [
8]. The release of the global JERS, PALSAR, and PALSAR-2 mosaics at 25 m resolution has fostered studies that are related to forest monitoring with SAR. ALOS PALSAR mosaics were used to produce the first SAR-based annual (2007–2010) global maps of forest and non-forest cover, from which some maps of forest losses and gain were generated based on thresholds [
34]. Tropical forest change monitoring with SAR data is usually performed by measuring backscatter intensity changes over time. Forest disturbances and regrowth have been assessed atsubcontinental scale over South-East Asia while using SAR intensity changes [
35]. Indirect approaches relate the backscatter signal to forest biomass using regional empirical regression models [
36,
37] and then calculate biomass changes over time. Such an approach has been tested in a small area in Central Mozambique [
38]: forest aboveground biomass (AGB) is estimated from SAR backscatter at two periods, and then changes in AGB are determined by subtracting the two estimates. This method is relevant in the context of REDD+ measurement, reporting, and verification (MRV), because both disturbance areas and biomass losses are estimated in one approach. However, the method suffers from error propagation, as errors in both maps may be summed. Applications that are based on ALOS PALSAR data are constrained by the small number of available observations: one observation per year in the case of the mosaics and one observation every 42 days at best with the original data. Most applications are therefore limited to bi-temporal analyses.
Other SAR based forest disturbance mapping approaches use three-dimensional (3D) information from radargrammetry and InSAR to detect gaps in the forest canopy [
39,
40,
41]. The complementarity of SAR sensors of different frequency for forest disturbance monitoring was demonstrated at a test site in the Republic of the Congo for Sentinel-1 C-band and TerraSAR-X data [
24].
C-band SAR data is less suited for forest disturbance assessment and above-grove biomass estimation than L-band SAR due to its shorter wavelength, which limits the penetration into the canopy (as evidenced in [
42]). C-band SAR has therefore been used to a much lesser degree than L-band data in past forest monitoring studies. However, the dense time series of the Sentinel-1 constellation offer a unique opportunity to systematically monitor forests at a repeat cycle of six to 12 days, depending on the data type and location. In addition, the continuity of Sentinel data is guaranteed up to 2030 with S-1C/D and S-2C/D, and the next generation of Sentinel satellites is already planned beyond 2030, allowing the development of long-term environmental monitoring systems.
A number of recent studies have already used Sentinel-1 data for forest disturbance mapping. Most of the approaches measure changes in SAR backscatter intensity over time, either directly from image to image or by calculating the coefficient of variation of a data stack for a pre-defined time period. Empirical thresholds are then applied to derive the forest disturbances. Such approaches have been tested for forest disturbance mapping in the Republic of the Congo [
14,
43] and for mapping forest fire-affected areas in Indonesia [
44]. A recent research study at a tropical forest site in Bolivia showed that the Sentinel-1 time series data can provide much more timely detections than Landsat and ALOS PALSAR-2 data [
45]. Most of the studies for detecting disturbances from Sentinel-1 data assume that forest disturbances are necessarily characterized by a decrease in C-band backscatter within the disturbed area, which does not always seem to be the case [
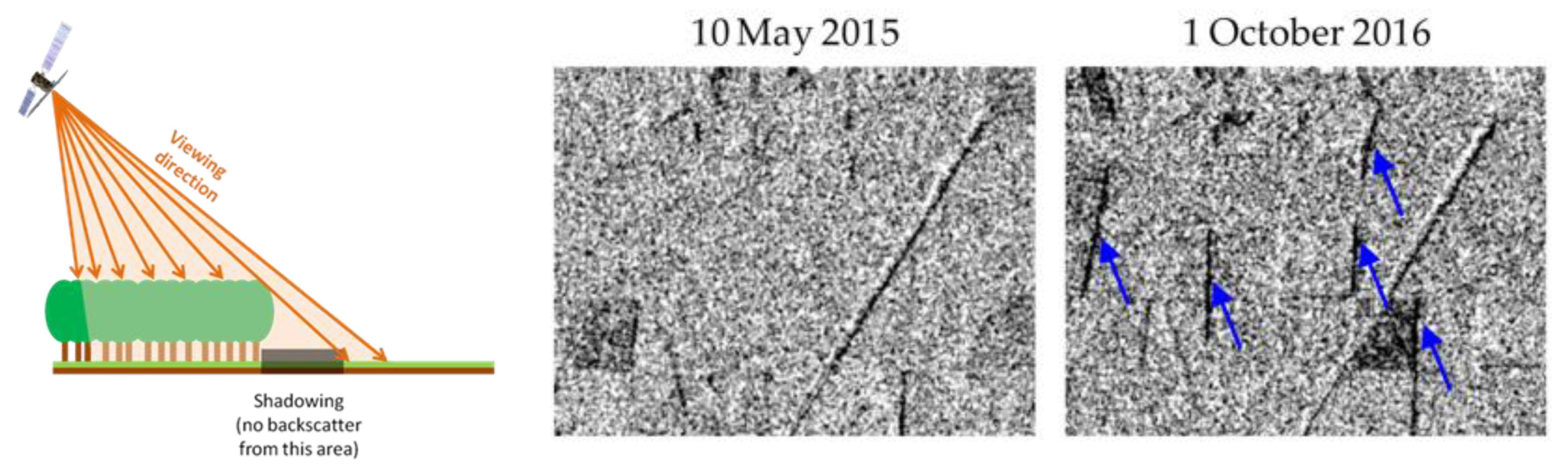
46]. Therefore, a new method that uses the geometric effects of SAR shadowing to detect forest change areas from Sentinel-1 SAR data has been proposed by [
47]. Depending on viewing geometry, SAR shadowing occurs at forest edges and new forest edges thus result in new SAR shadows that can be easily detected in the time series. Ascending and descending orbit data are needed to detect new shadows on two sides of the forest disturbance patch. The entire disturbed area is then reconstructed from the newly detected shadows using a convex envelope boundary operator. This new method is used for the SAR based forest disturbance detection in this study and
Section 4 describes it in more detail.
Forest Disturbance Monitoring Combining SAR and Optical Data
Optical and SAR data have been combined in remote sensing applications for many years [
48,
49]. Combination methods on a data-level that preserve spectral as well as spatial characteristics of both sensors are difficult to design. The combination of SAR and optical data on a result-level avoids this problem by classifying each source individually. The results are then combined while using various methods, such as probabilistic theory, evidence theory, fuzzy theory, neural networks, or ensemble learning classifiers. This way, the characteristics of both sensors can successfully be preserved [
49,
50].
There are a number of recent studies that argue in support of a combined use of SAR and optical data for tropical forest monitoring [
3,
50,
51,
52,
53]. Recent results indicate that a combined use can improve tropical forest monitoring for burnt area detection [
14], for forest/non-forest mapping [
52,
54,
55], for biomass assessment [
56,
57,
58], and for deforestation and degradation monitoring [
45,
51,
59]. A combination of ALOS PALSAR data and Landsat data was also used to enhance the discrimination of mature forest, secondary forest, and non-forest areas [
60]. A recently presented workflow for near real-time deforestation detection integrates medium resolution optical data and SAR data in a Bayesian approach [
45,
50]. By integrating optical Landsat 7/8 data with ALOS PALSAR-2 L-band and Sentinel-1 C-band SAR data, deforestation areas in Bolivia were detected with a mean time lag of 31 days, and detections show a user accuracy of 88% and a producer accuracy of 89. The time lag increased by a considerable six weeks when only using Landsat data and by one week when only using Sentinel-1 data [
3]. However, the study only focuses on deforestation areas and does not address small forest disturbances that are difficult to detect from medium resolution data, such as Landsat, but require high resolution data instead.
What is still missing in current research developments is an in-depth analysis of forest disturbance detection capabilities that can be achieved by combining data from the Sentinel-2 and Sentinel-1 missions. These two satellite missions currently have the highest temporal coverage of freely available data and provide imagery at high spatial resolution. One reason why these data sets have not been joined more extensively yet could be that many research studies using time series of data rely on processing services, such as Google Earth Engine (
https://earthengine.google.com/), where Sentinel-2 surface reflectance data has only been included recently.
4. Discussion
Forest/Non-Forest Mask:
The benchmark FNF maps show good overall accuracies for both the Peru (93.0%) and the Gabon test site (98.8%), but the omission and commission errors for the non-forest class are larger than 10% at both test sites. The overall accuracies for Gabon are similar to those reported by other studies: 98.1% for the national forest map of year 2000 and 95.9% for the Global Forest Watch dataset of year 2000 evaluated at a 1 ha minimum mapping unit and > 30% tree cover [
81]. The accuracies are generally lower at the Peru site, with an omission error of 21.5% for the non-forest class. The lower accuracies in Peru seem to be related to a lower total percentage of forest area and a higher complexity of land use at the test site. Non-forest areas at the Peru test site make up 20% of the total area, which is a much higher percentage than at the Gabon test site with 5.6%. Large parts of the forested area are composed of secondary forests with rapid regrowth rates and the overall percentage of forest changes is higher than in Gabon. The primary cause of forest loss in the Loret and San Martin region of Peru where the test site is located is clearing for agriculture and pastures and large-scale industrial oil-palm plantations [
2]. A rapid regrowth with shrubs, bushes, and low height trees is very common soon after agricultural clearing. Even from visual interpretation of VHR imagery it is often difficult to decide if an area is already forest regrowth or still non-forest. Non-forest areas are mostly characterized by different forms of agricultural use, but also by shrublands and grasslands.
The situation is different in Gabon, where 88.5% of the entire country is covered by forests and large parts of the forest are still primary forests [
81]. Large parts of the test site in Gabon are characterized by homogeneous forests. Non-forest areas are not distributed evenly at the Gabon test site, but they are concentrated around villages and oil palm plantations in the South. These site characteristics largely explain the higher FNF map accuracies at the Gabon site.
The different methodologies that are used to derive the FNF maps could also explain some of the observed errors. The Peru FNF map is based on 13 images spanning 12 months. Some changes that occurred towards the end of the time window might not have been accounted for with the applied majority approach, even if a temporal weighting is applied.
Forest Disturbance Detection:
When interpreting the forest disturbance results, it has to be considered that forest disturbances are quite different in character at both of the test sites. Forest disturbances at the Peru test site are characterized by the logging of mostly secondary forests for subsequent agricultural use, which is in-line with other findings [
2]. There is almost no selective logging of individual trees, but the size of forest disturbance areas is mostly small (60% are smaller than 0.5 ha). At the Gabon site, we find three different disturbance types: large-area deforestation for oil palm plantations in the South, small scale logging for subsequent agricultural/urban use near villages, and a large amount of industrial selective logging and logging roads in the forest concession areas. Gabon contributes 4.7 ± 0.9% of total forest loss in the Congo basin [
64]. Selective logging is by far the most prominent forest disturbance type in Gabon, which is different to the other Congo Basin countries, where small scale clearing for agriculture is the most important driver of forest loss [
64]. In the final disturbance map of the combined approach, 85% of the detected forest disturbance areas are smaller than 0.2 ha and 94% are smaller than 0.5 ha. Disturbance patch size is a critical issue in forest disturbance mapping, but it is seldom addressed in publications on forest monitoring. Many studies only map disturbances that are larger than 0.09 ha [
8] to 1 ha [
81] and, thus, only focus on deforestation and do not include small and patchy forest degradation. In terms of area changes, a large deforestation for oil-palm plantations contributes approximately 55% of the total forest change area.
When comparing the accuracies based on the stratified sampling of the three approaches in Peru-“S1 Only”, “Optical Only”, and “Union”-we find highest overall accuracies for the “Union” approach (0.84), but differences in overall accuracy are small (“S1 Only”: 0.82, “Optical Only”: 0.79). When comparing SAR and optical results for the forest disturbance class, the “Optical Only” approach shows higher user accuracy and lower producer accuracy than the “S1 Only” approach. However, the producer accuracy is lower than 0.5 for both approaches showing high omission errors for both data types. For the “Union” approach, the producer accuracy increases up to 0.71 suggesting that SAR and optical map results are highly complementary. This is also confirmed by the area statistics. Of the 331.79 ha of disturbance area in the “Union” disturbance map, only 42.70 ha are detected by both “S1 Only” and the “Optical Only” approach. This is only about one-fifth of the recalculated adjusted disturbed forest area (225.61 ha). The remaining area is only detected by one of the two approaches. The area statistics also show that the NDVI and NDII7 thresholds used for the optical approach in Peru are slightly too conservative. Only 153.90 ha are detected as disturbed, which is 30% less than the calculated adjusted area.
The producer accuracy of the NF class in Peru is quite low (0.6), suggesting that parts of the forest area in the benchmark FNF mask are indeed not tree-covered at the beginning of the change detection window. The accuracies at this subset are lower than the overall accuracy of the FNF mask for the entire Peru test site. This can be explained by the higher complexity of land use at the subset. It is also partly a problem of the different minimum mapping units used for generating and validating the FNF mask and the disturbance detection. Misclassifications in the benchmark FNF map can make up a large part of the overall error in disturbance detection. This error can be more important than the errors related to the change detection methodology, since the overall area percentage of forest disturbances in one year is only very small. This highlights the importance of using accurate and up-to-date benchmark forest masks in operational forest disturbance monitoring.
When we remove the NF class in the second validation approach, the overall and the user accuracies improve considerably. For the “S1 Only” approach, the user accuracy of the disturbed forest increases from 0.64 to 0.95, as many of detected changes turned out to have been non-forest already at the start of the change detection period. These areas are vegetated and often used for agriculture. In the optical images their spectral signals are quite similar to those of forest and are thus misclassified as forest and no change is detected. However, the S1 approach detects a SAR shadow that is related to an existing forest border. In Peru, the S1 disturbance detection starts with the same date as the optical approach. A shadow is detected in the first S1 image of the time series and, thus, a change is written to the change map, even though the shadow was already present before.
In Gabon, of the 15,723 ha detected as disturbed forest in the “Union” approach, only 5241 ha are detected by both of the approaches. However, in Gabon the “Optical Only” approach detects a much larger disturbed area than the “S1 Only” approach—13,763 ha vs. 7201 ha. This effect is mostly caused by the large deforestation area for a palm oil plantation. The applied S1 disturbance detection approach is not suitable for such large disturbance areas, as the detected shadows on both sides are too far apart to reconstruct the disturbance area with a convex envelope boundary operator. Also very small or very narrow patches are difficult to detect with the S1 approach used in this study. If the gap is too small, the distinct shadow is lost and detection fails. Also thin and elongated disturbance patches stretching in the east–west direction are difficult to detect, as the sensor is side-looking from east or west due to its near-polar orbit.
It can also be expected, that due to their smaller pixel size, the S-2 results are better than the results only based on Landsat data. Shortcomings in all optical approaches are problems with regrowth and the selection of appropriate thresholds. Regrowth and cloud cover are the main limitations of optical disturbance monitoring in the tropics, as discussed in the Introduction. A recent study on forest loss monitoring from 2000–2014 in the Congo Basin with Landsat data showed that in Gabon on average only 1.1 cloud-free observations were available per year [
64]. Regrowth cannot properly be detected with such a sparse time series.
Several forest change detection maps and accuracy analyses for both Peru and Gabon have been produced by other research teams in recent years. Most of them are based on Landsat data and validations are mostly carried out at Landsat pixel level, i.e., 30 × 30 m [
8,
64]. In Peru, a Landsat-based national analysis of forest cover loss from 2000 to 2010 revealed that the majority of gross forest cover loss (92.2%) was attributed to clearing for agriculture and tree plantations. The rest was due to natural disturbance, mostly represented by flooding and river meandering (6.0%), and fires (1.5%). The classification was based on training data derived primarily from Landsat composites and forest cover loss was mapped at 30 m Landsat pixel scale. Validation was performed while using a point-based sampling design at Landsat pixel level (30 × 30 m) [
2]. The pixels are visually analyzed for forest cover loss while using Landsat (2000) and RapidEye (2011) data at 5 m spatial resolution. The reported producer accuracy for forest loss is 75.4%. This is significantly higher than our “Optical Only” producer accuracy at the Peru test site of 38.2% and similar to the combined map producer accuracy of 71.0%. We assume that the observed differences are primarily related to sampling unit size-30 × 30 m for the analysis vs. 10 × 10 m in our study-and the complexity of land use at our test site subset. The reference plot area we use for the validation is only 11.11% of that used in [
2] and our reference data set includes very small disturbances (0.01 ha) that are neglected in the other study.
Peru was also one of the first countries used to demonstrate and validate the near real-time GFW HTFA (Global Forest Watch—Humid Tropical Forest Alerts) methodology [
8]. Detected forest loss was grouped by patch size: Loss detection consisting of a single Landsat pixel (approximately 0.1 ha) totaled only 4% of total detected loss, 33% of detected loss patches were less than one hectare, and 63% were larger or equal one hectare in size. The reported user accuracies on a Landsat-pixel level of 30 × 30 m are between 86.5%, when including boundary pixels, and 96.2% with boundary pixels removed [
8]. Producer accuracies are not provided in [
8], but most of the omitted samples were from tree cover loss patches < 10 ha (= less than 100 Landsat pixels). For a better comparison between our results and the GFW dataset we also derived mapping accuracies for the GFW dataset for the exact same validation plots and time frame at the Peru test site. The dataset is based on the GFW version 1.6 (
https://earthenginepartners.appspot.com/science-2013-global-forest/download_v1.6.html) and includes all changes of 2016 (“lossyear” = 2016) clipped with our FNF mask of March 2016. Thus, the time frame for disturbance detections is identical to the observation period we used in this study. Therefore, the results can be directly compared. For geometric congruency, we also performed a geometric adjustment to the S-2 geometry with the same parameters as used for the adjustment of the original Landsat 8 data.
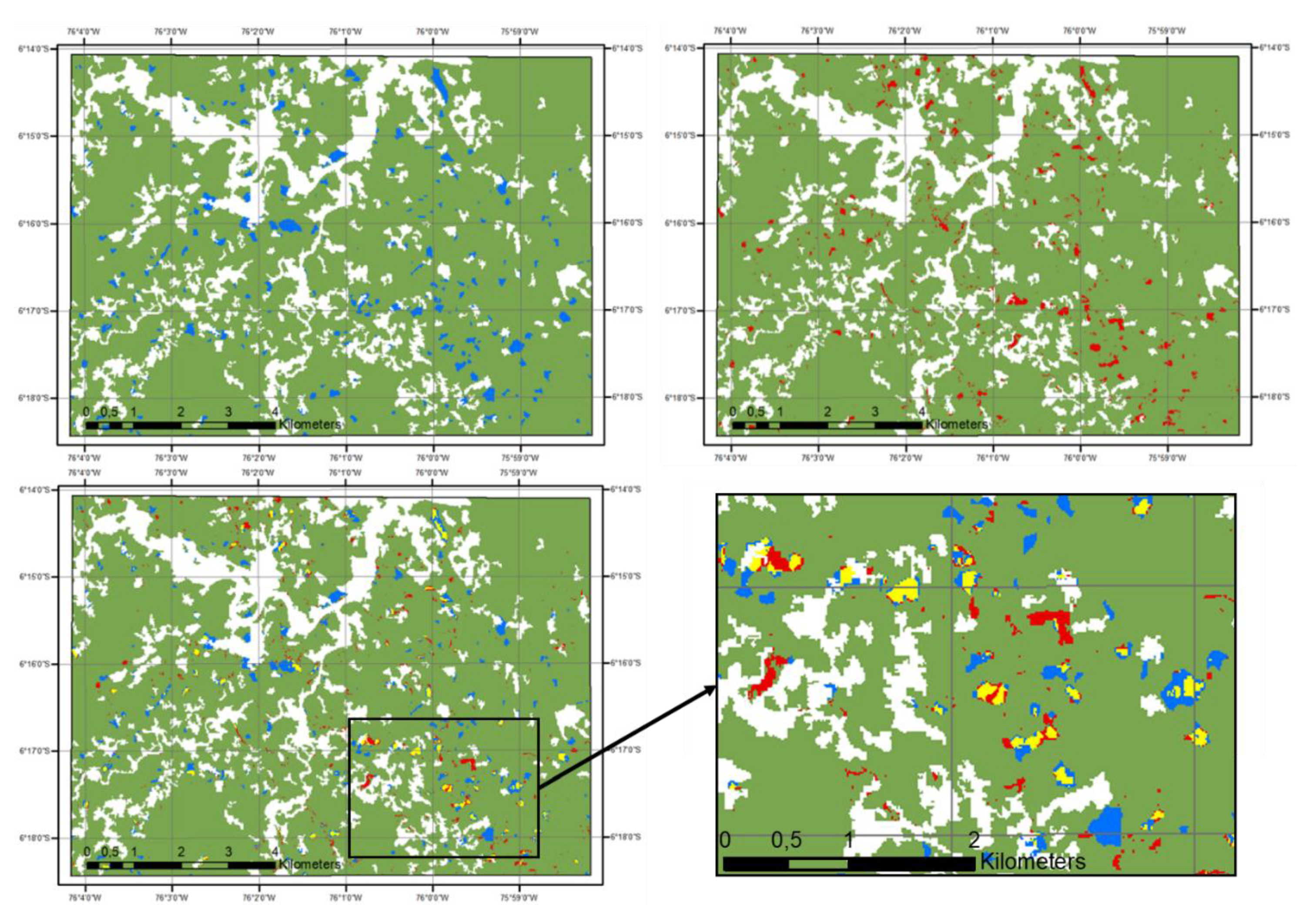
Table 7 shows the GFW validation results. The user accuracies of disturbances are quite comparable between our approaches (“S1 Only”: 0.95, “Optical Only”: 0.963, “Union”: 0.941 from
Table 5) and GFW (0.969 from
Table 7), especially the “Optical Only” result is very similar, which makes sense, as GFW is also a result based on optical data. The same is true for the overall accuracy values. Producer accuracy of disturbances for the “Optical Only” result is a bit lower than for the GFW result, which is probably due to the very conservative thresholds selected in the assessments. When comparing the GFW result to the “Union” approach however, the producer accuracy of “Union” is much higher (0.71—
Table 5) than that of the GFW data set (0.377—
Table 7). This clearly shows the added value of including the additional S-1 data.
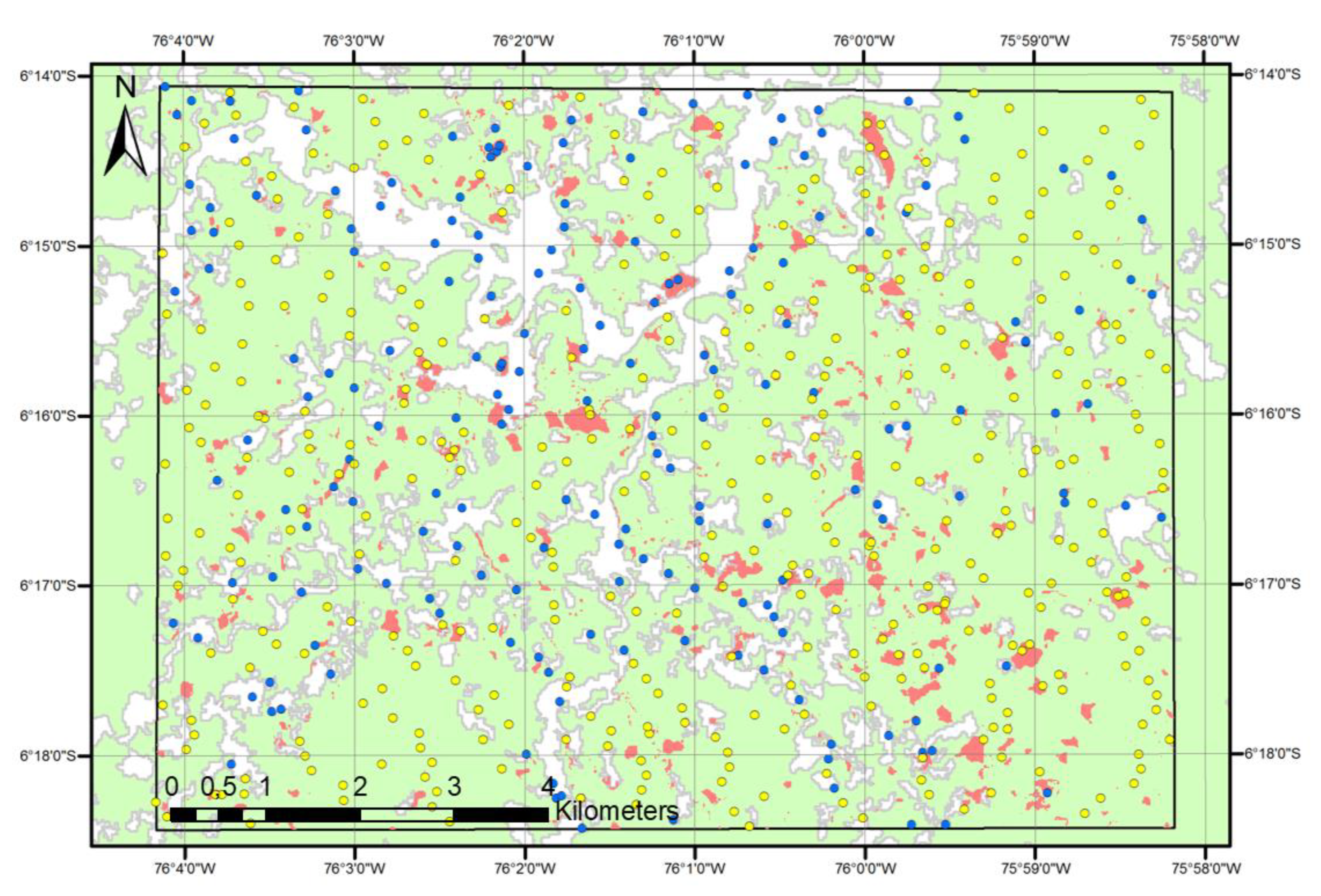
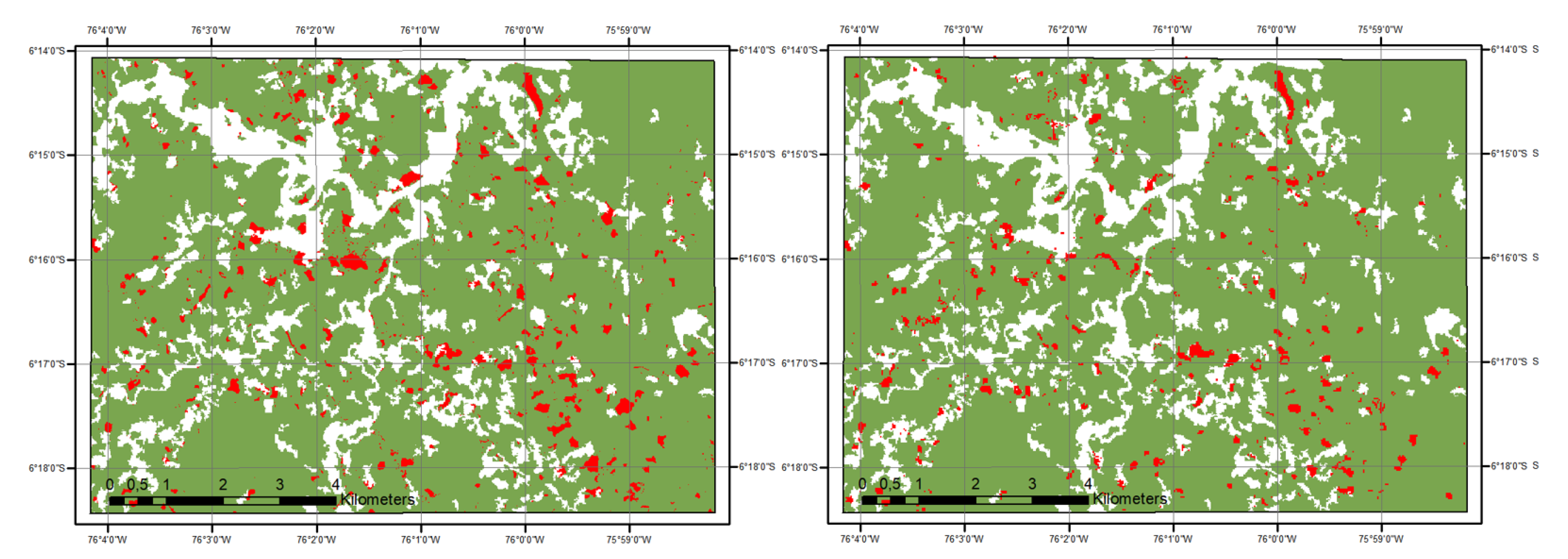
Figure 8 provides a visual comparison of the “Union” mapping result and the GFW mapping result.
For Gabon, a recent study compares the forest change estimates from 2000 to 2010 between national forest maps and the Global Forest Change (GFC) map from the University of Maryland [
81]. The results indicate that net deforestation is not significantly different to 0, which suggests that the loss of forest is counter balanced by regeneration. The MMU of 1 ha used by GFC in the change analysis [
81] strongly differs to that of our presented study, where we detect and validate forest disturbances at a MMU of 0.04 ha. At this spatial level, we also detect small forest disturbances that are typical of industrial selective logging. Selective logging is the most prominent forest disturbance type in Gabon, accounting for more than 60% of forest disturbances [
64]. At a 1 ha MMU such small forest disturbance features cannot be detected and, therefore, also not included in the analysis.
Despite or even because of the aforementioned shortcomings, S-1 and optical data are highly complementary. Combining the two data sets significantly increases the accuracy, especially the producer accuracy of disturbances and, as other studies have demonstrated, it also allows for a more rapid detection needed for near real-time alerting [
3].
The results show that some forest disturbance patches are indeed detected by both sensor types and related mapping approaches. However, different types of disturbances are often only captured by only one sensor, which confirms the benefit of sensor combination. The contributions of optical and SAR data to the forest disturbance mapping success are variable and they depend on the land use and forest characteristics of a specific site. The dependencies are primarily based on type and typical height of forest (primary, secondary); weather and atmospheric conditions; topography; dominant LU types outside of the forest; change drivers (selective logging, plantations, agriculture, shifting cultivation, fire) and related size of disturbance plots; data availability (ascending, descending for SAR); density of the time series; and regrowth speed, and orientation of the satellite (especially S1) with respect to the disturbance site.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







