The Determination of Aerosol Distribution by a No-Blind-Zone Scanning Lidar

 ,
,  ,
,  and
and 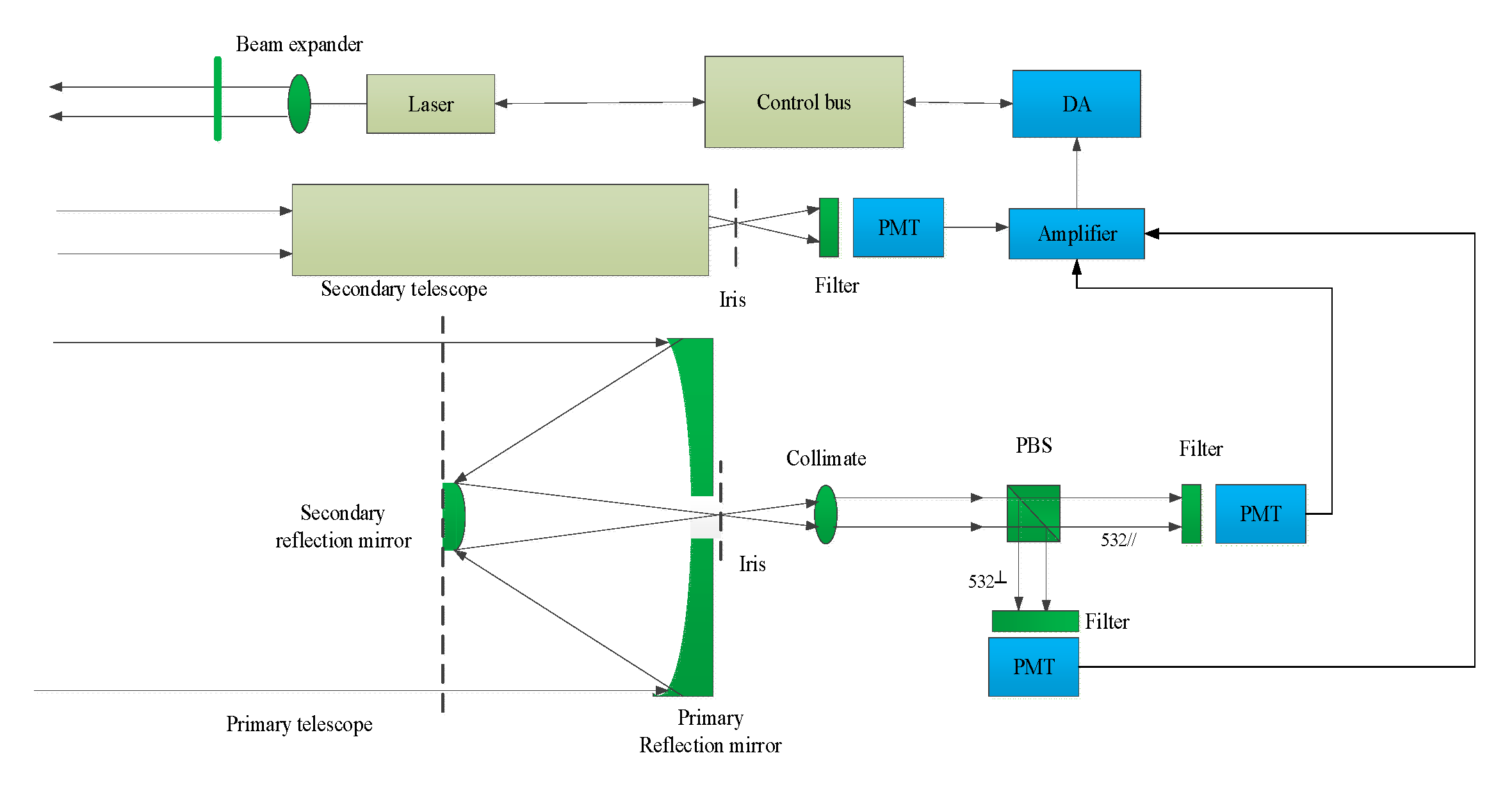{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
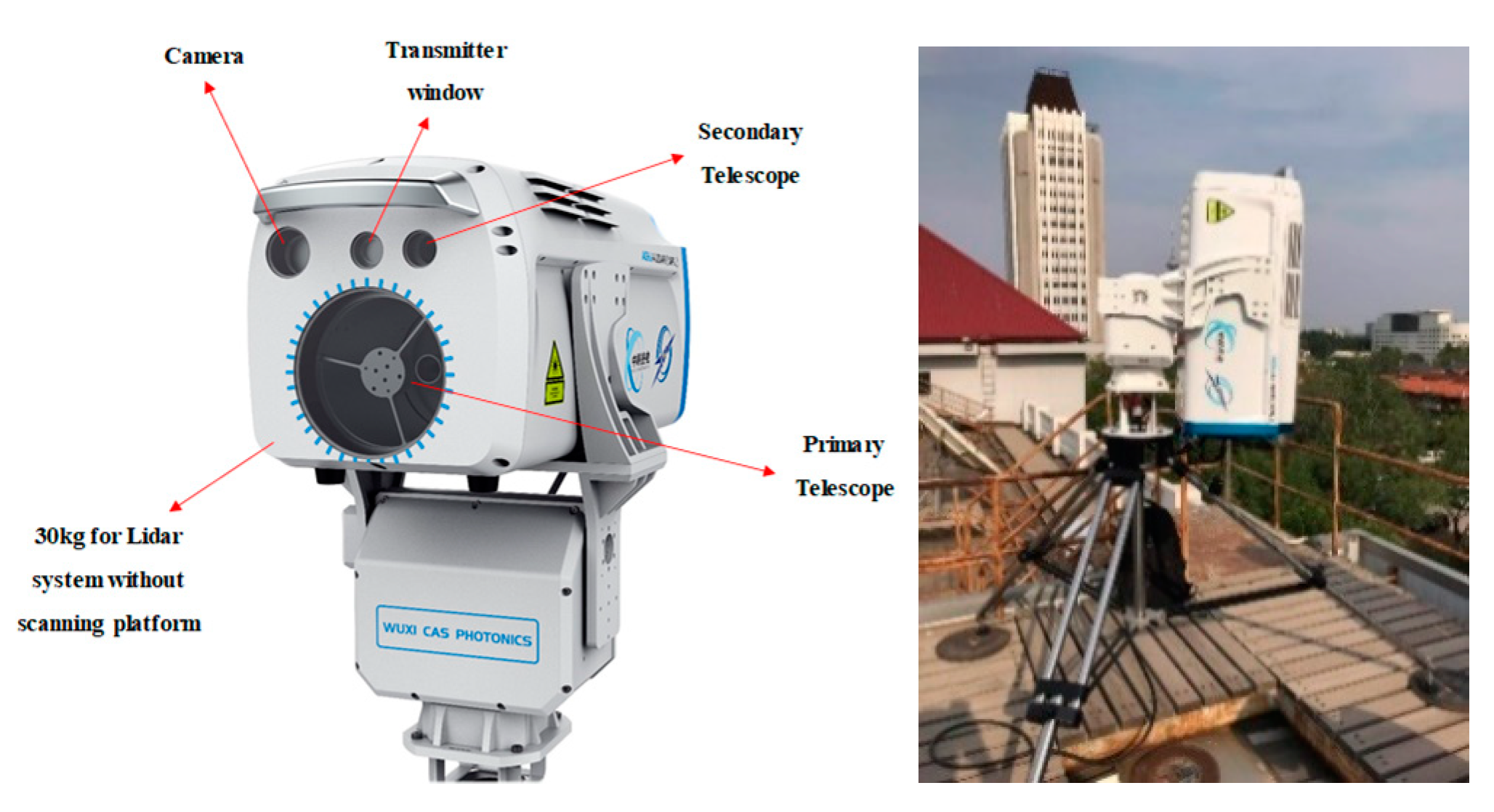
2.1. Dual-FOV Lidar System
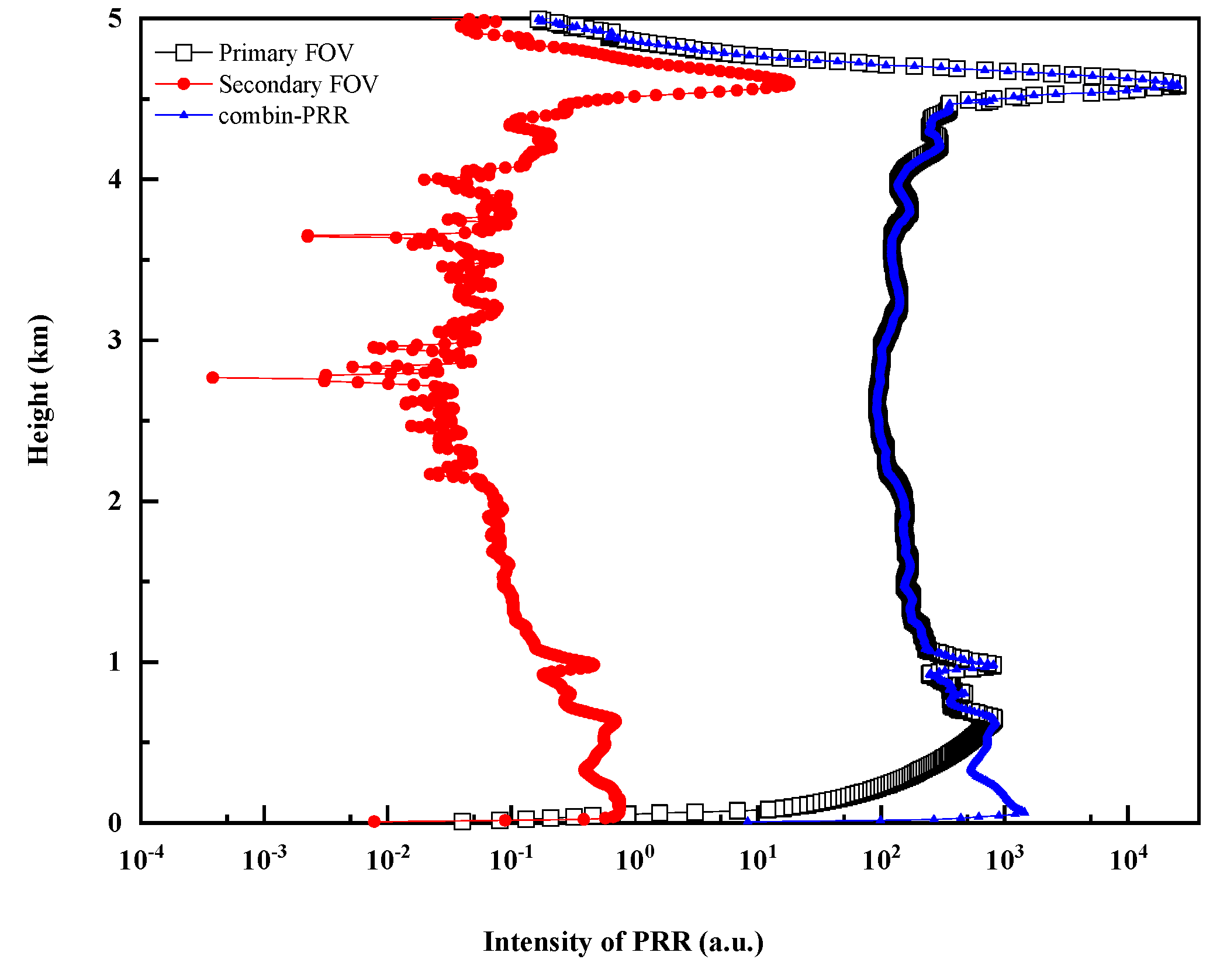
2.2. Evaluation and Joining of the Signals from the Two FOVs
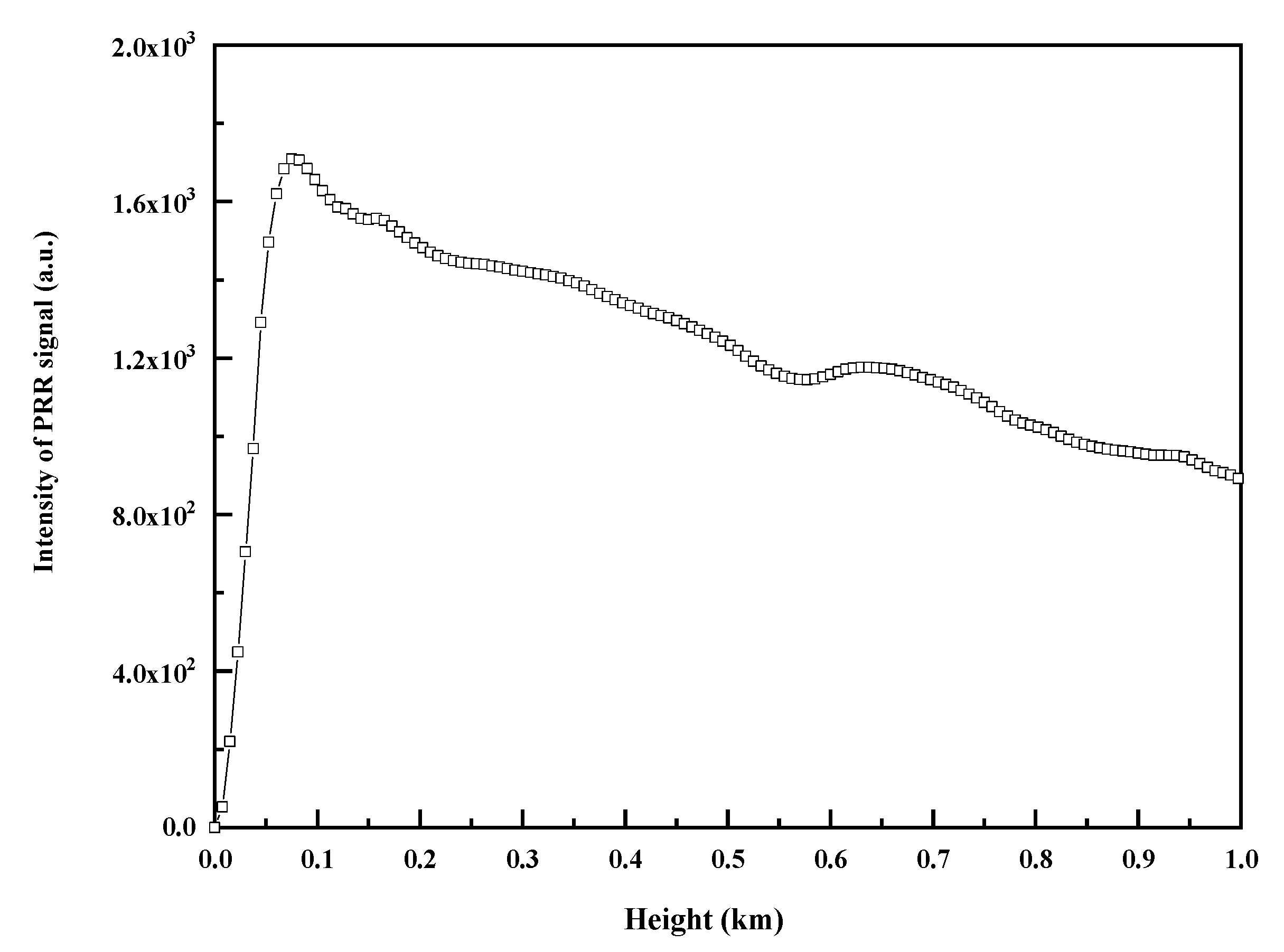
2.3. Evaluation of the Blind Zone and the Transition Zone of Dual-FOV Lidar
2.4. Retrieval of the Vertical Profile of Aerosols
2.5. Retrieval of Horizontal Distribution of Aerosols
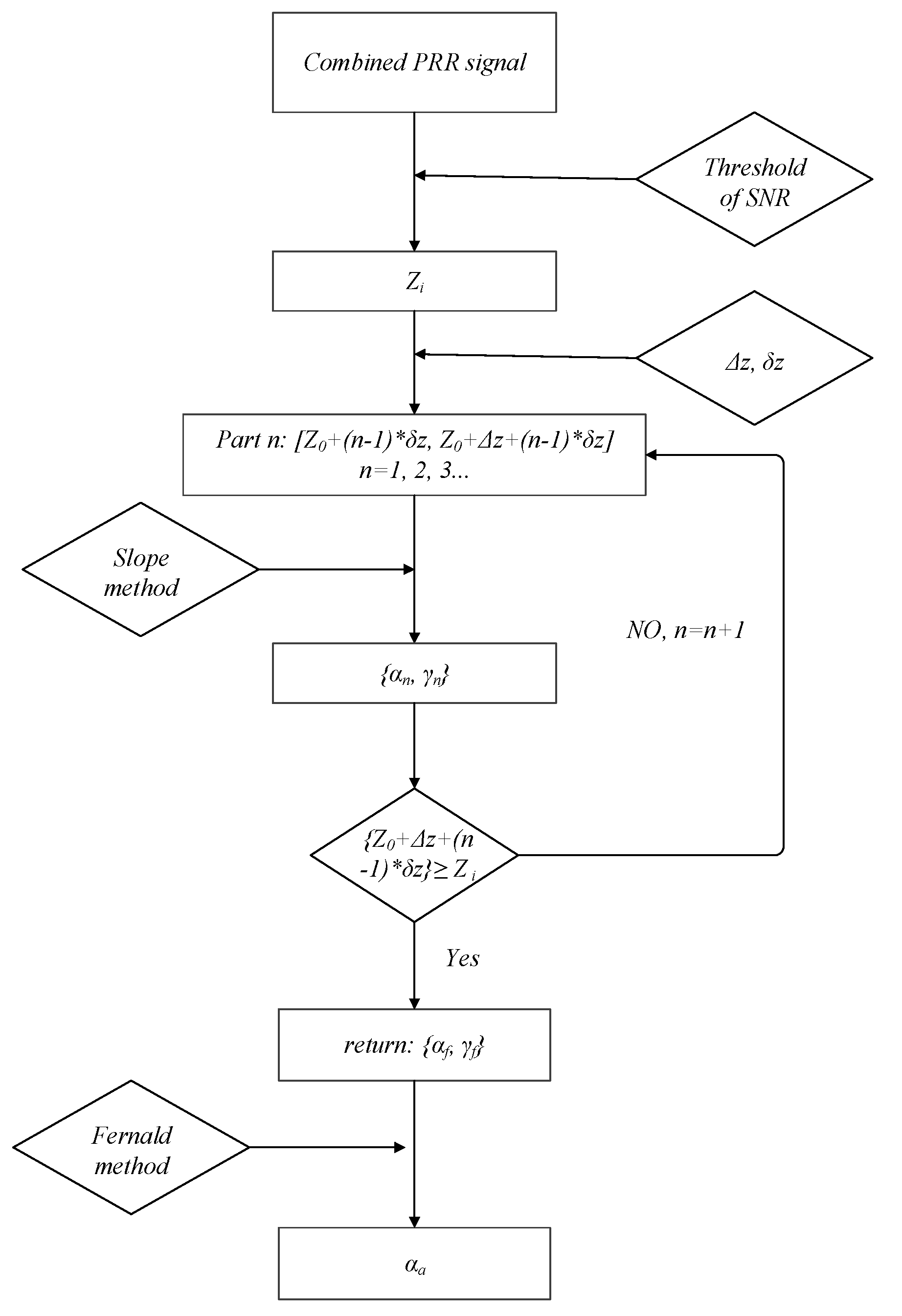
- At an initial point Zi, the position with an SNR that exceeds the threshold, along with each combined return signal, was determined;
- Then, the combined returned signal was divided into a series of parts from the origin point Z0 to initial point Zi as follows: part 1, Z0~[Z0 + Δz]; part 2, [Z0 + δz]~[Z0 + Δz + δz]; … part n, [Z0 + (n − 1) × δz]~[Z0 + Δz + (n − 1) × δz], etc., where n = 1, 2, …; Δz is the step of the interval and δz is the minimum spatial resolution of this lidar system;
- The slope method [32] was applied to each part. Pairs of both, aerosol extinction coefficients αn and the Pearson coefficient γn were returned from each part;
- Finally, the pair of {αf, Zf} with the optimum γf was applied as boundary conditions in the Fernald solutions. The forward-integral and backward-integral results provide the entire profile of aerosol extinction coefficients in the horizontal distribution.
3. Results and Discussion
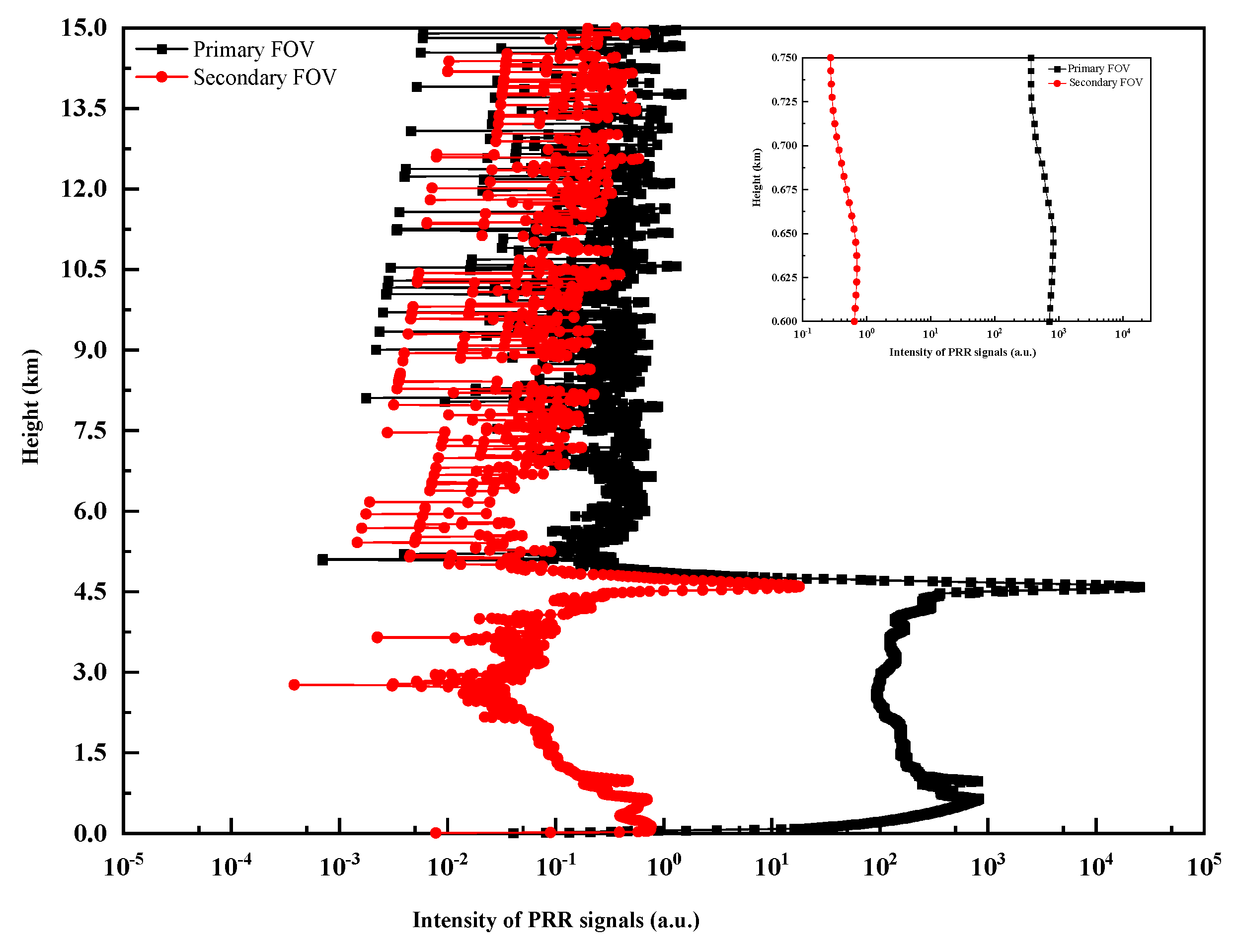
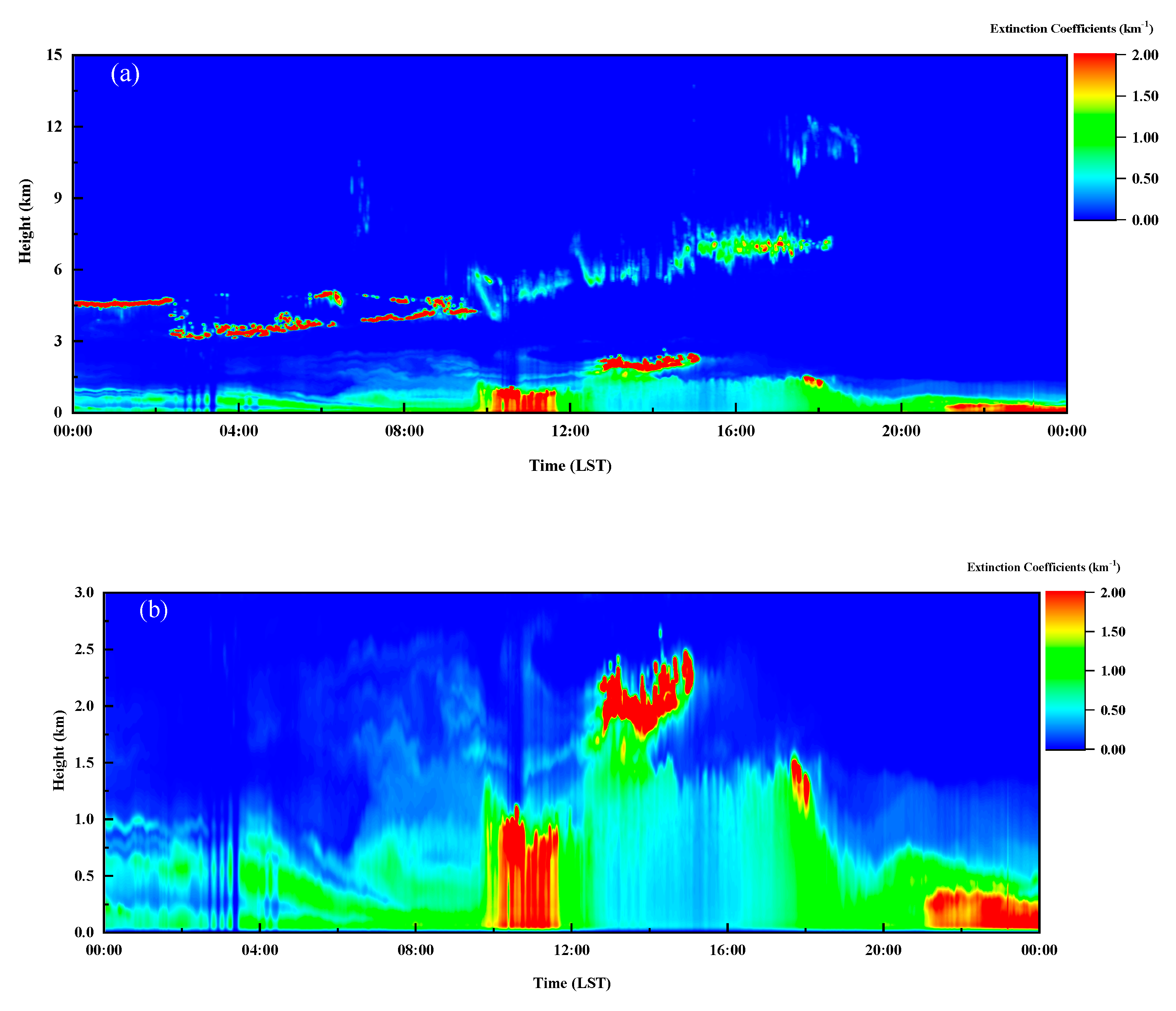
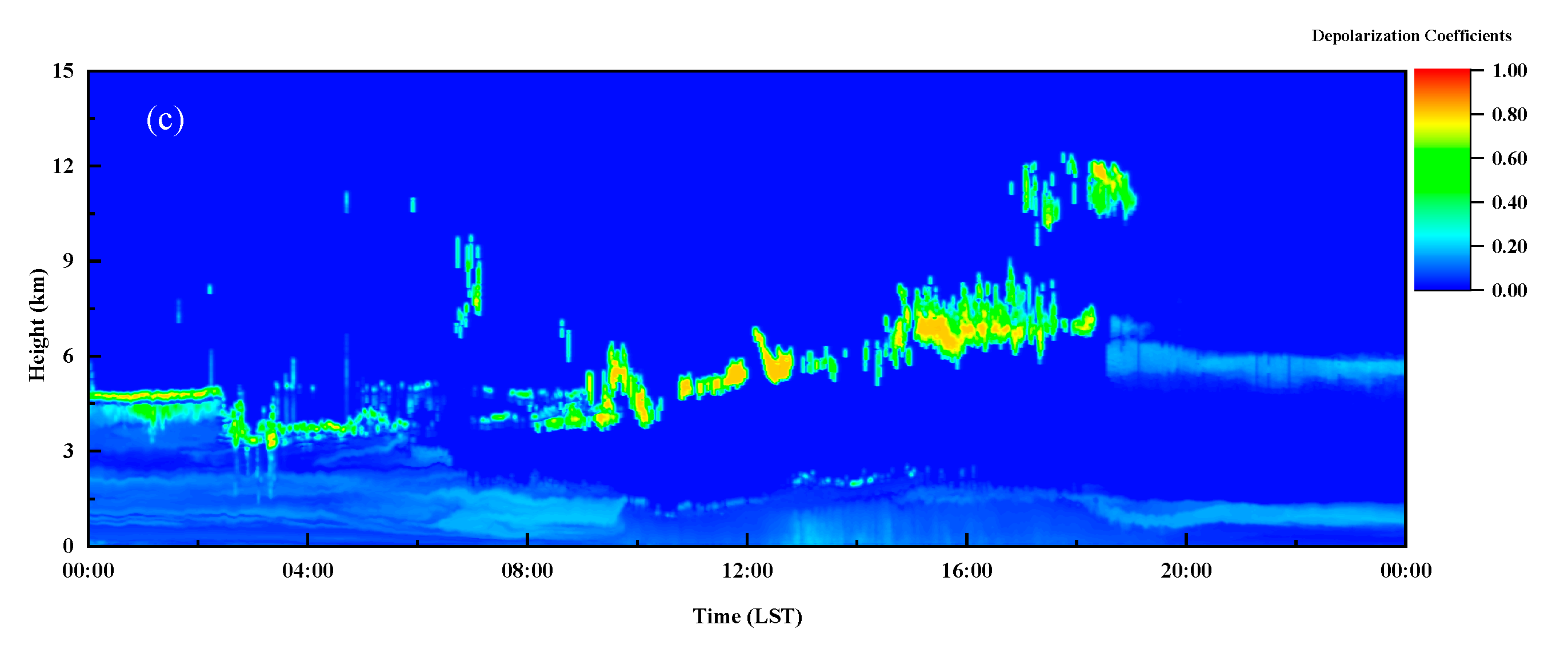
3.1. Vertical Distribution Observation of Aerosols
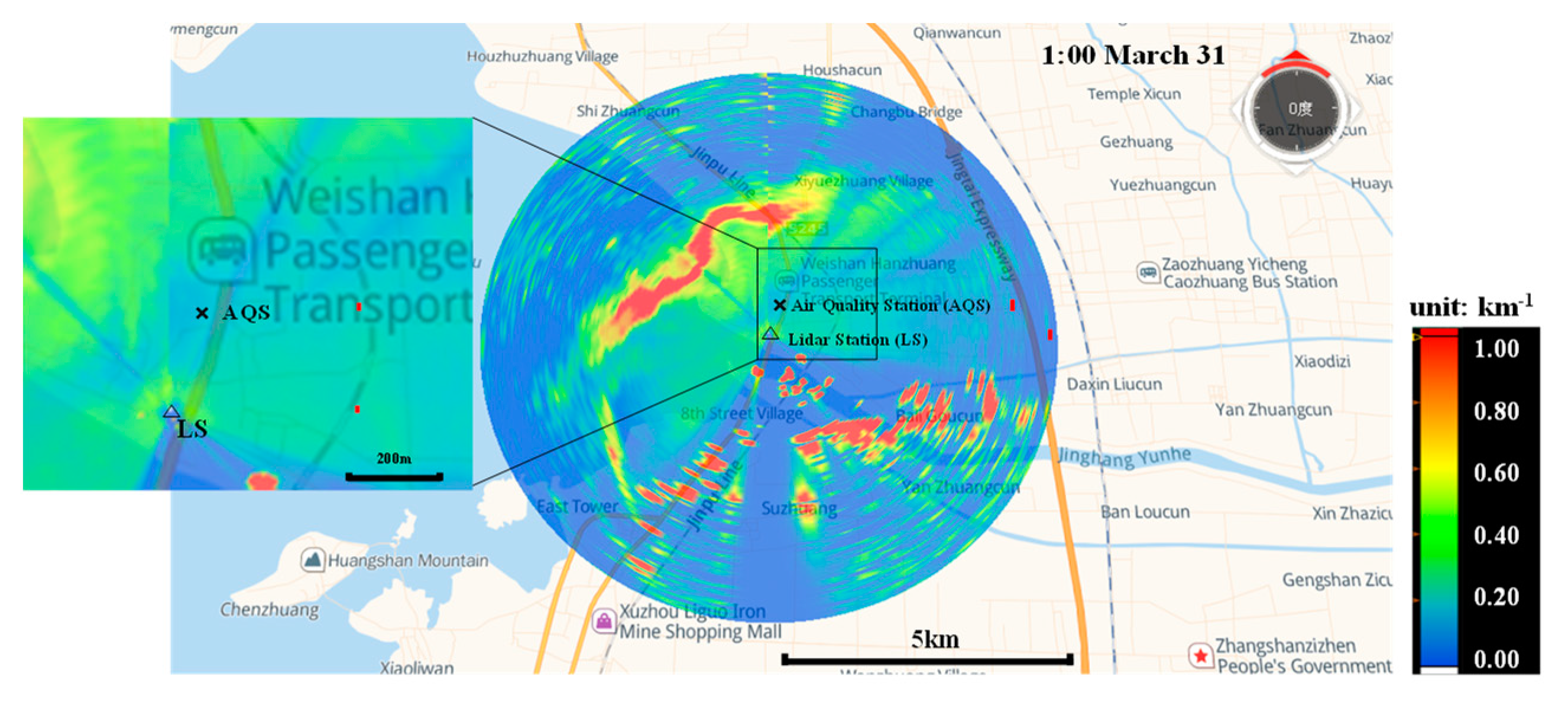
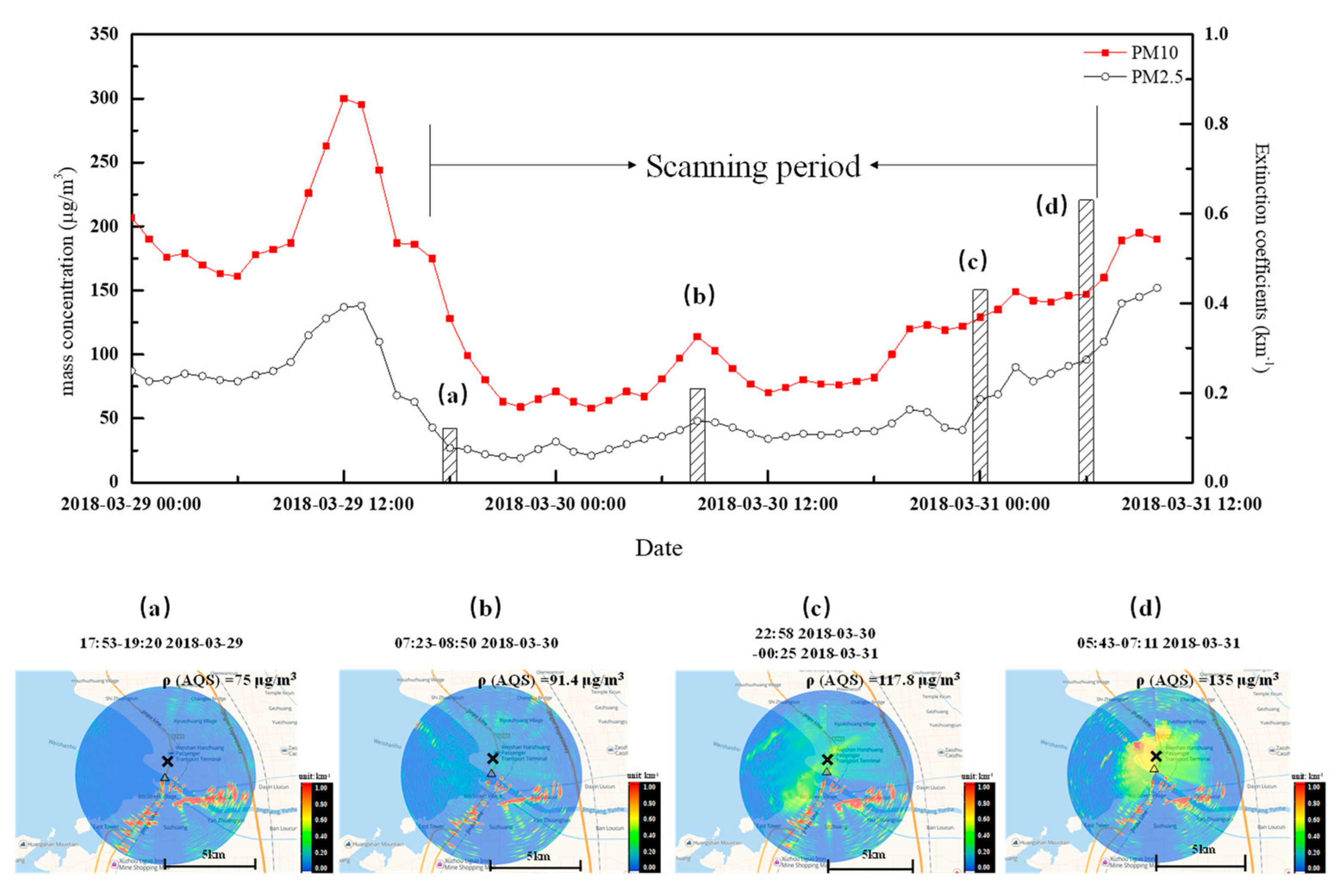
3.2. Horizontal Distribution Mapping of Aerosols
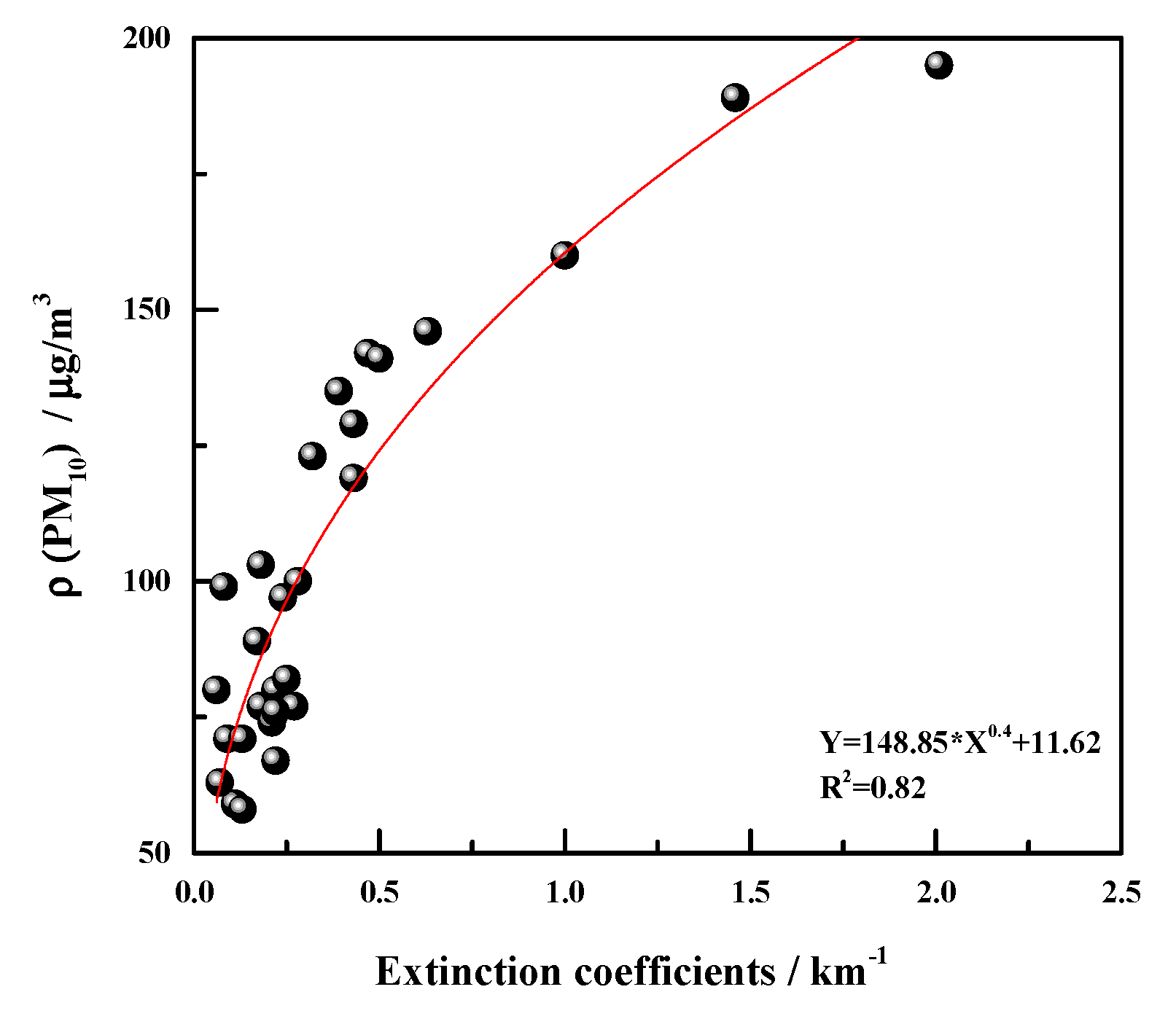
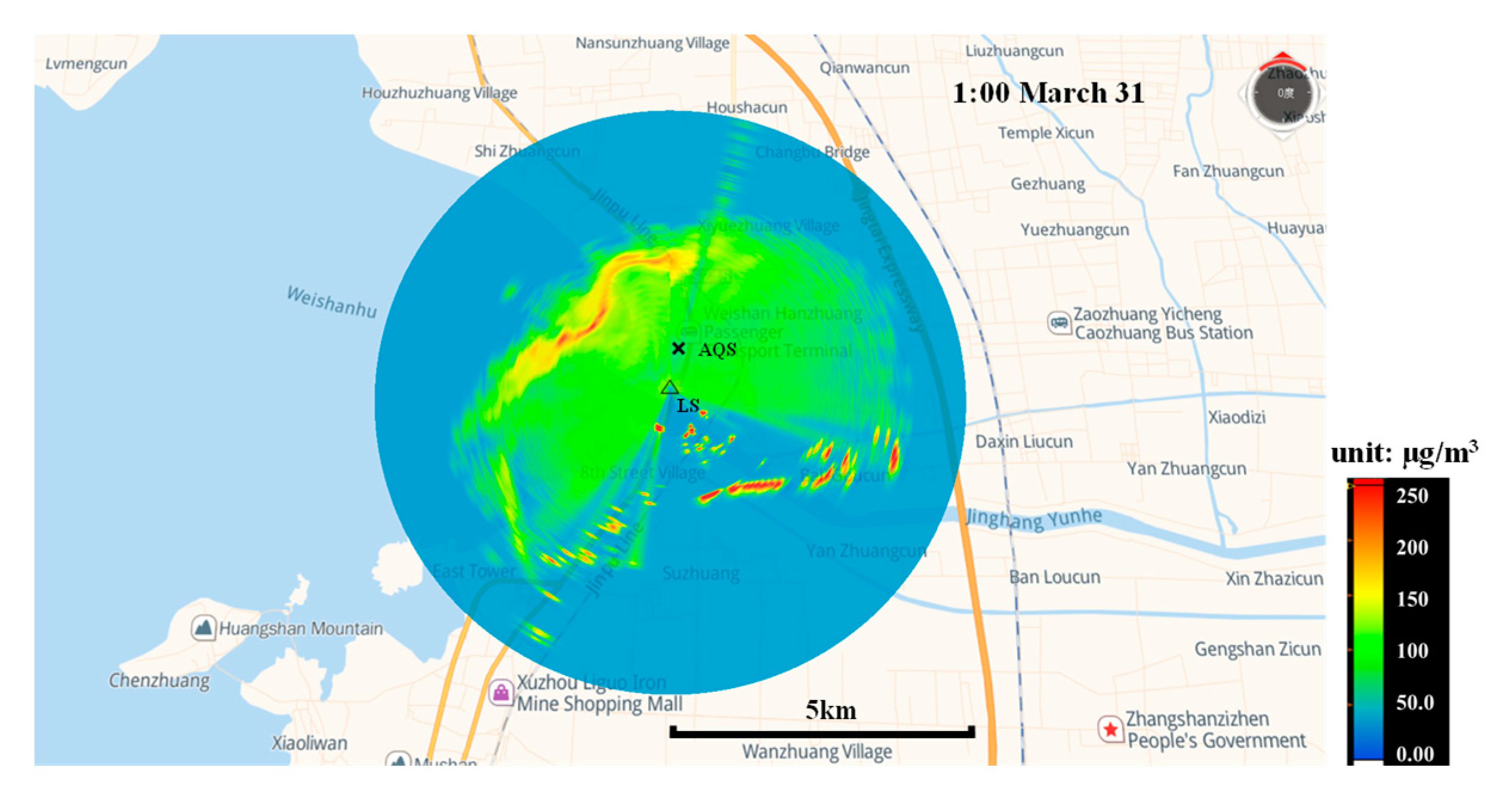
3.3. Quantitative Evaluation of Aerosol Distribution
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, B.; Ma, Y.Y.; Gong, W.; Zhang, M.; Yang, J. Determination of boundary layer top on the basis of the characteristics of atmospheric particles. Atmos. Environ. 2018, 178, 140–147. [Google Scholar] [CrossRef]
- Han, S.Q.; Liu, J.L.; Hao, T.Y.; Zhang, Y.F.; Li, P.Y.; Yang, J.B.; Wang, Q.L.; Cai, Z.Y.; Yao, Q.; Zhang, M.; et al. Boundary layer structure and scavenging effect during a typical winter haze-fog episode in a core city of BTH region, China. Atmos. Environ. 2018, 179, 187–200. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Liu, C.; Liu, W.Q.; Zhang, T.S.; Xu, J. A synchronous observation of enhanced aerosol and NO2 over Beijing, China, in winter 2015. Sci. Total Environ. 2017, 575, 429. [Google Scholar] [CrossRef] [PubMed]
- Pal, S.; Lee, T.R.; Phelps, S.; De Wekker, S.F.J. Impact of atmospheric boundary layer depth variability and wind reversal on the diurnal variability of aerosol concentration at a valley site. Sci. Total Environ. 2014, 496, 424–434. [Google Scholar] [CrossRef]
- Danchovski, V. Summertime Urban Mixing Layer Height over Sofia, Bulgaria. Atmosphere 2019, 10, 36. [Google Scholar] [CrossRef]
- Bozlaker, A.; Prospero, J.M.; Fraser, M.P.; Chellam, S. Quantifying the Contribution of Long-Range Saharan Dust Transport on Particulate Matter Concentrations in Houston, Texas, Using Detailed Elemental Analysis. Environ. Sci. Technol. 2013, 47, 10179–10187. [Google Scholar] [CrossRef]
- Salinas, S.V.; Chew, B.N.; Miettinen, J.; Campbell, J.R.; Welton, E.J.; Reid, J.S.; Yu, L.E.; Liew, S.C. Physical and optical characteristics of the October 2010 haze event over Singapore: A photometric and lidar analysis. Atmos. Res. 2013, 122, 555–570. [Google Scholar] [CrossRef]
- Xie, C.B.; Nishizawa, T.; Sugimoto, N.; Matstui, I.; Wang, Z.F. Characteristics of aerosol optical properties in pollution and Asian dust episodes over Beijing, China. Appl. Opt. 2008, 47, 4945–4951. [Google Scholar] [CrossRef]
- Nishizawa, T.; Sugimoto, N.; Matsui, I.; Shimizu, A.; Hara, Y.; Itsushi, U.; Yasunaga, C.; Kudo, R.; Kim, S.W. Ground-based network observation using Mie–Raman lidars and multi-wavelength Raman lidars and algorithm to retrieve distributions of aerosol components. J. Quant. Spectrosc. RA 2017, 188, 79–93. [Google Scholar] [CrossRef]
- Matthais, V.; Freudenthaler, V.; Amodeo, A.; Balin, I.; Balis, D.; Bӧsenberg, J.; Chaikovsky, A.; Chourdakis, G.; Comeron, A.; Delaval, A.; et al. Aerosol lidar intercomparison in the framework of the EARLINET project. 1. Instruments. Appl. Opt. 2004, 43, 961–976. [Google Scholar] [CrossRef]
- Chiang, C.W.; Das, S.K.; Chiang, H.W.; Nee, J.B.; Sun, S.H.; Chen, S.W.; Lin, P.H.; Chu, J.C.; Su, C.S.; Su, L.S. A new mobile and portable scanning lidar for profiling the lower troposphere. Geosci. Instrum. Meth. 2015, 4, 35–44. [Google Scholar] [CrossRef]
- Chazette, P.; Sanak, J.; Dulac, F. New Approach for Aerosol Profiling with a Lidar Onboard an Ultralight Aircraft: Application to the African Monsoon Multidisciplinary Analysis. Environ. Sci. Technol. 2007, 41, 8335–8341. [Google Scholar] [CrossRef] [PubMed]
- Proestakis, E.; Amiridis, V.; Marinou, E.; Georgoulias, A.K.; Solomos, S.; Kazadzis, S.; Chimot, J.; Che, H.Z.; Alexandri, G.; Binietoglou, I.; et al. 9-year spatial and temporal evolution of desert dust aerosols over South-East Asia as revealed by CALIOP. Atmos. Chem. Phys. 2018, 18, 1–35. [Google Scholar] [CrossRef]
- Weitkamp, C. LIDAR: Range-Resolved Optical Remote Sensing of the Atmosphere; Springer: New York, NY, USA, 2004. [Google Scholar]
- Kovalev, V.A.; Eichinger, W.E. Elastic Lidar: Theory, Practice, and Analysis Methods; Wiley-Interscience: New York, NY, USA, 2004. [Google Scholar]
- Sasano, Y.; Shimizu, H.; Takeuchi, N.; Okuda, M. Geometrical form factor in the laser radar equation: An experimental determination. Appl. Opt. 1979, 18, 3908–3910. [Google Scholar] [CrossRef] [PubMed]
- Kuze, H.; Kinjo, H.; Sakurada, Y.; Takeuchi, N. Field-of-view dependence of lidar signals by use of Newtonian and Cassegrainian telescopes. Appl. Opt. 1998, 37, 3128–3132. [Google Scholar] [CrossRef]
- Welton, E.J.; Voss, K.J.; Gordon, H.R.; Maring, H.; Smirnov, A.; Holben, B.; Schmid, B.; Livingston, J.M.; Russell, P.B.; Durkee, P.A.; et al. Ground-based lidar measurements of aerosols during ACE-2: Instrument description, results, and comparisons with other ground-based and airborne measurements. Tellus B 2000, 52, 636–651. [Google Scholar] [CrossRef]
- Stelmaszczyk, K.; Dell’Aglio, M.; Chudzyński, S.; Stacewicz, T.; Wöste, L. Analytical function for lidar geometrical compression form-factor calculations. Appl. Opt. 2005, 44, 1323–1331. [Google Scholar] [CrossRef]
- Hey, J.V.; Coupland, J.; Foo, M.H.; Richards, J.; Sandford, A. Determination of overlap in lidar systems. Appl. Opt. 2011, 50, 5791–5797. [Google Scholar]
- He, T.Y.; Stanič, S.; Gao, F.; Bergant, K.; Veberič, D.; Song, X.Q.; A. Dolžan, A. Tracking of urban aerosols using combined lidar-based remote sensing and ground-based measurements. Atmos. Meas. Tech. 2012, 5, 891–900. [Google Scholar] [CrossRef]
- Behrendt, A.; Pal, S.; Wulfmeyer, V.; Valdebenito, B.Á.M.; Lammel, G. A novel approach for the characterization of transport and optical properties of aerosol particles near sources—Part I: Measurement of particle backscatter coefficient maps with a scanning UV lidar. Atmos. Environ. 2011, 45, 2795–2802. [Google Scholar] [CrossRef]
- Sasano, Y. Tropospheric aerosol extinction coefficient profiles derived from scanning lidar measurements over Tsukuba, Japan, from 1990 to 1993. Appl. Opt. 1996, 35, 4941–4952. [Google Scholar] [CrossRef] [PubMed]
- Shan, H.H.; Zhang, H.; Liu, J.J.; Tao, Z.M.; Wang, S.H.; Ma, X.M.; Zhou, P.C.; Yao, L.; Liu, D.; Xie, C.B.; et al. Retrieval method of aerosol extinction coefficient profile based on backscattering, side-scattering and Raman-scattering lidar. Opt. Commun. 2018, 410, 730–732. [Google Scholar] [CrossRef]
- Bian, Y.X.; Zhao, C.S.; Xu, W.Y.; Kuang, Y.; Tao, J.C.; Wei, W.; Ma, N.; Zhao, G.; Lian, S.P.; Tan, W.S.; et al. A novel method to retrieve the nocturnal boundary layer structure based on CCD laser aerosol detection system measurements. Remote Sens. Environ. 2018, 211, 38–47. [Google Scholar] [CrossRef]
- Barnes, J.E.; Parikh, N.C.; Kaplan, T. Boundary layer scattering measurements with a charge-coupled device camera lidar. Appl. Opt. 2003, 42, 2647–2652. [Google Scholar] [CrossRef]
- Meki, K.; Yamaguchi, K.; Li, X.; Saito, Y.; Kawahara, T.D.; Nomura, A. Range-resolved bistatic imaging lidar for the measurement of the lower atmosphere. Opt. Lett. 1996, 21, 1318–1320. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, J.; Wandinger, U.; Malinka, A. Dual-field-of-view Raman lidar measurements for the retrieval of cloud microphysical properties. Appl. Opt. 2013, 52, 2235–2247. [Google Scholar] [CrossRef] [PubMed]
- Gong, W.; Li, J.; Mao, F.Y.; Zhang, J.Y. Comparison of simultaneous signals obtained from a dual-field-of-view lidar and its application to noise reduction based on empirical mode decomposition. Chin. Opt. Lett. 2011, 9, 050101. [Google Scholar] [CrossRef]
- Fernald, F.G. Analysis of atmospheric lidar observations- Some comments. Appl. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef] [PubMed]
- Fernald, F.G.; Herman, B.M.; Reagan, J.A. Determination of Aerosol Height Distributions by Lidar. J. Appl. Meteorol. 1972, 11, 482–489. [Google Scholar] [CrossRef]
- Collis, R.T.H. Lidar: A new atmospheric probe. Q. J. R. Meteor. Soc. 1966, 92, 220–230. [Google Scholar] [CrossRef]
- Chiang, C.W.; Das, S.K.; Nee, J.B. An iterative calculation to derive extinction-to-backscatter ratio based on lidar measurements. J. Quant. Spectrosc. R. 2008, 109, 1187–1195. [Google Scholar] [CrossRef]
- Müller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-type-dependent lidar ratios observed with Raman lidar. J. Geophys. Res. 2007, 112, D16202. [Google Scholar] [CrossRef]
- Zhao, G.; Zhao, C.; Kuang, Y.; Tao, J.; Tan, W.; Bian, J.; Li, C. Impact of aerosol hygroscopic growth on retrieving aerosol extinction coefficient profiles from elastic-backscatter lidar signals. Atmos. Chem. Phys. 2017, 17, 12133–12143. [Google Scholar] [CrossRef]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Liu, W.; Liu, C.; Zhang, T.; Liu, J.; Chen, Z.; Xiang, Y.; Meng, X. The Determination of Aerosol Distribution by a No-Blind-Zone Scanning Lidar. Remote Sens. 2020, 12, 626. https://doi.org/10.3390/rs12040626
Wang J, Liu W, Liu C, Zhang T, Liu J, Chen Z, Xiang Y, Meng X. The Determination of Aerosol Distribution by a No-Blind-Zone Scanning Lidar. Remote Sensing. 2020; 12(4):626. https://doi.org/10.3390/rs12040626
Chicago/Turabian StyleWang, Jie, Wenqing Liu, Cheng Liu, Tianshu Zhang, Jianguo Liu, Zhenyi Chen, Yan Xiang, and Xiaoyan Meng. 2020. "The Determination of Aerosol Distribution by a No-Blind-Zone Scanning Lidar" Remote Sensing 12, no. 4: 626. https://doi.org/10.3390/rs12040626
APA StyleWang, J., Liu, W., Liu, C., Zhang, T., Liu, J., Chen, Z., Xiang, Y., & Meng, X. (2020). The Determination of Aerosol Distribution by a No-Blind-Zone Scanning Lidar. Remote Sensing, 12(4), 626. https://doi.org/10.3390/rs12040626