Comparison of River Basin Water Level Forecasting Methods: Sequential Neural Networks and Multiple-Input Functional Neural Networks


Abstract
1. Introduction
2. Region and Material
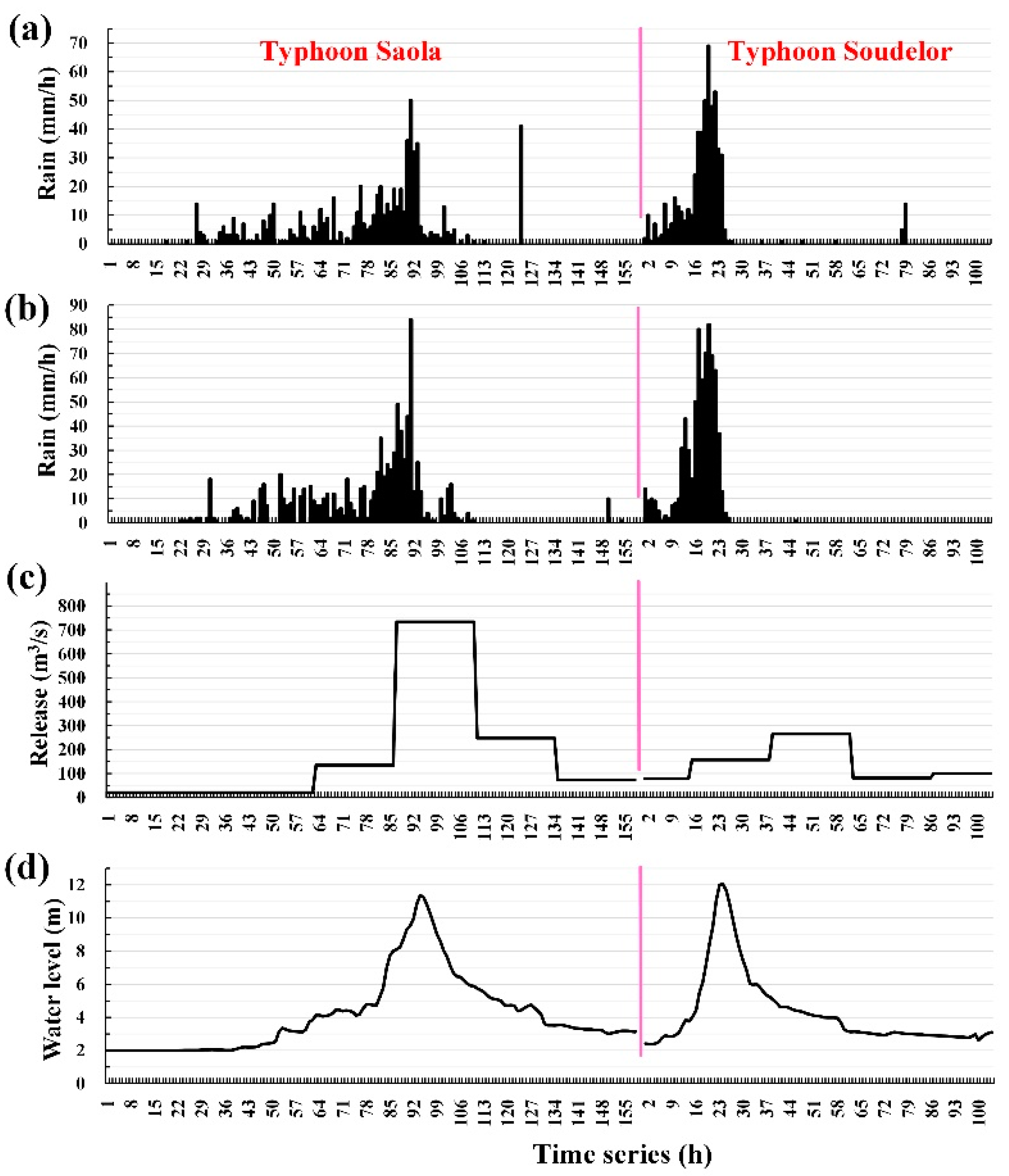
2.1. Typhoons and Raw Data
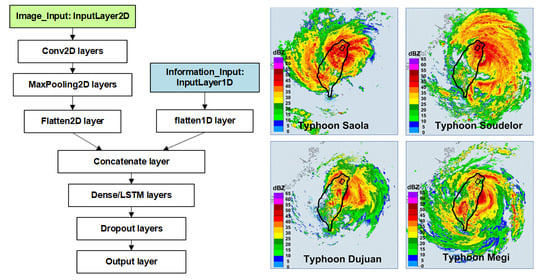
2.2. Radar Imagery
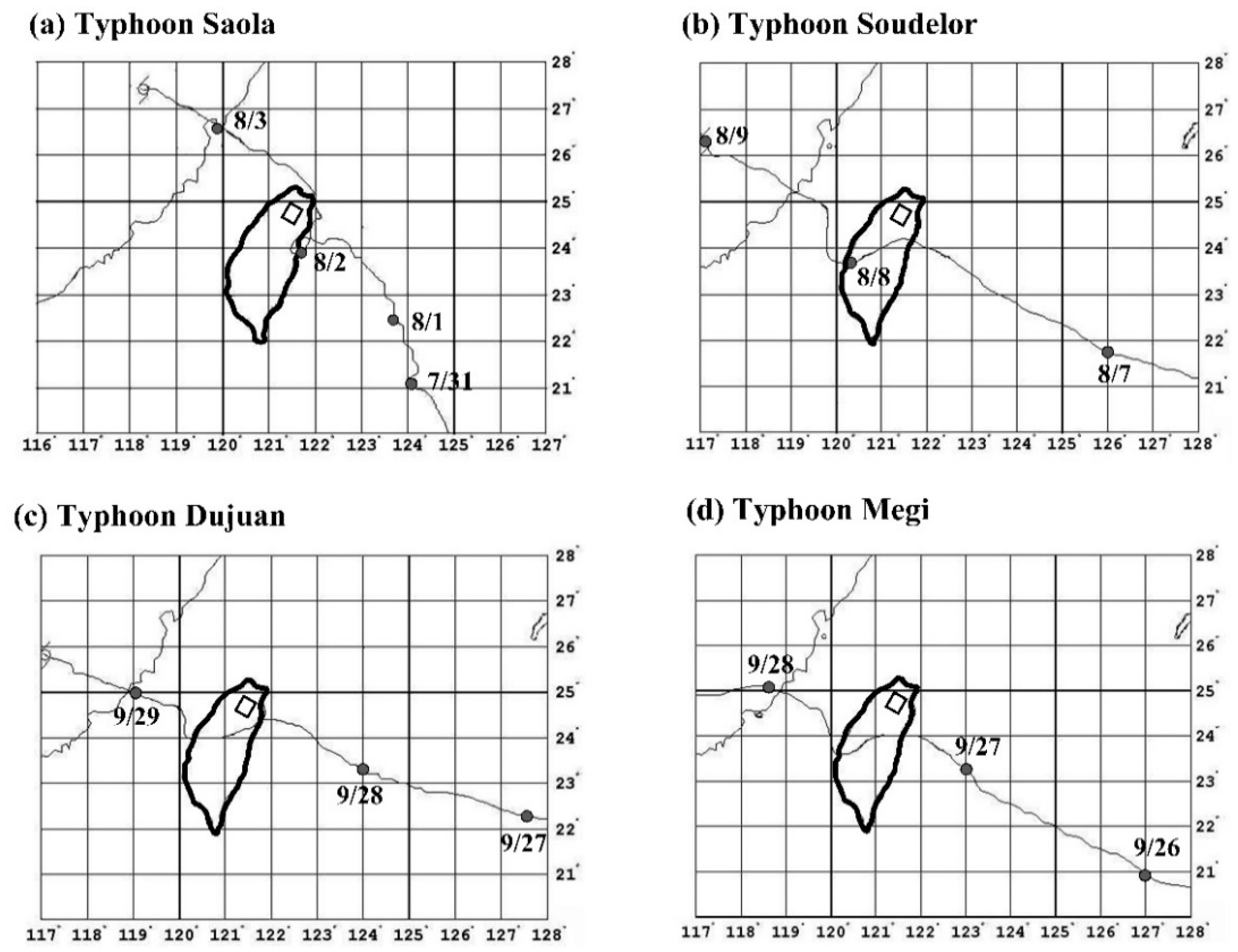
2.3. Typhoon Paths
3. Model Development
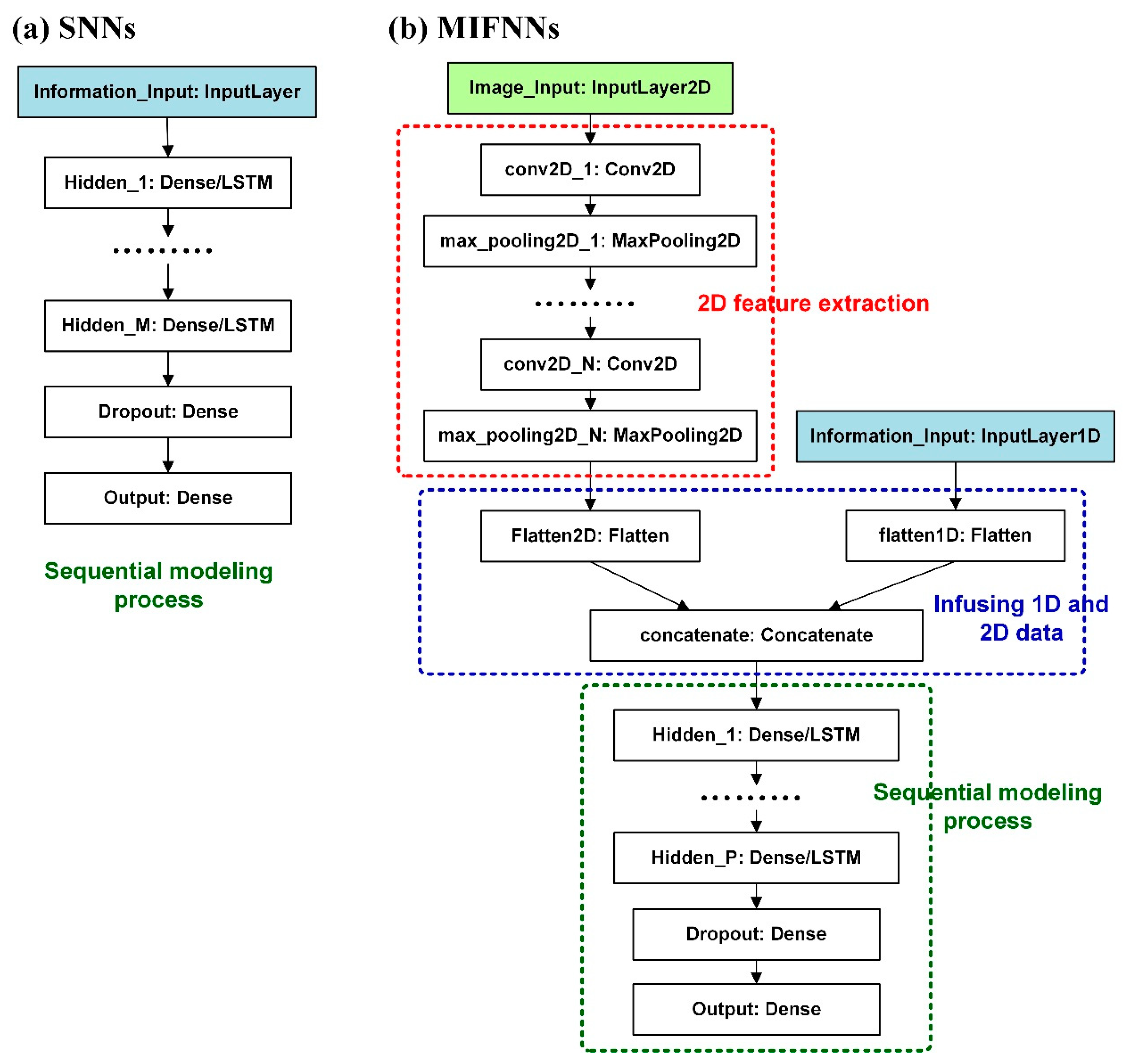
3.1. SNNs
3.2. MIFNNs
4. Model Constructions
4.1. Data Splitting
4.2. Selection of Lag Times
4.3. Training SNNs
4.4. Training MIFNNs
5. Simulations
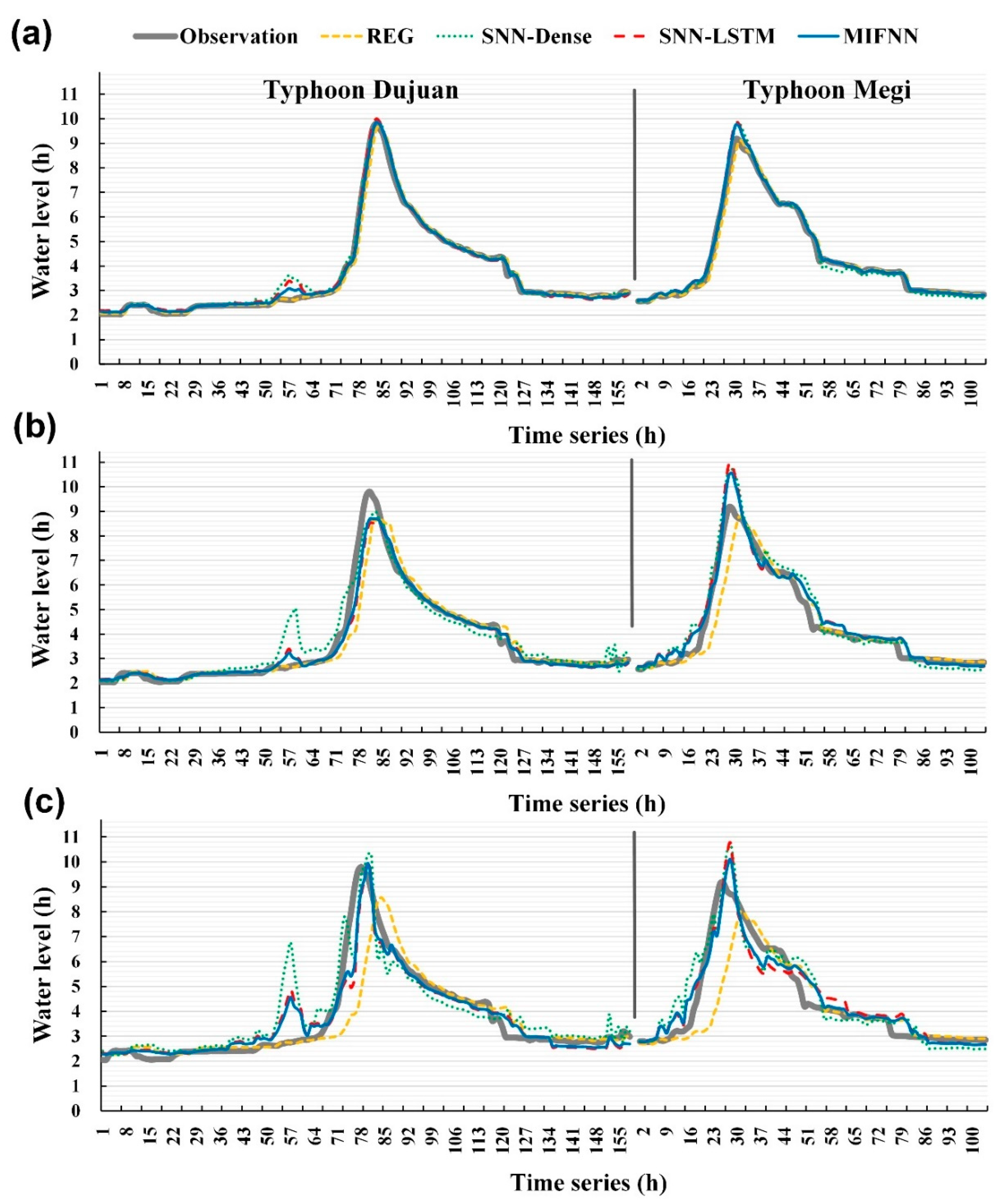
5.1. Testing Typhoons and Predictions
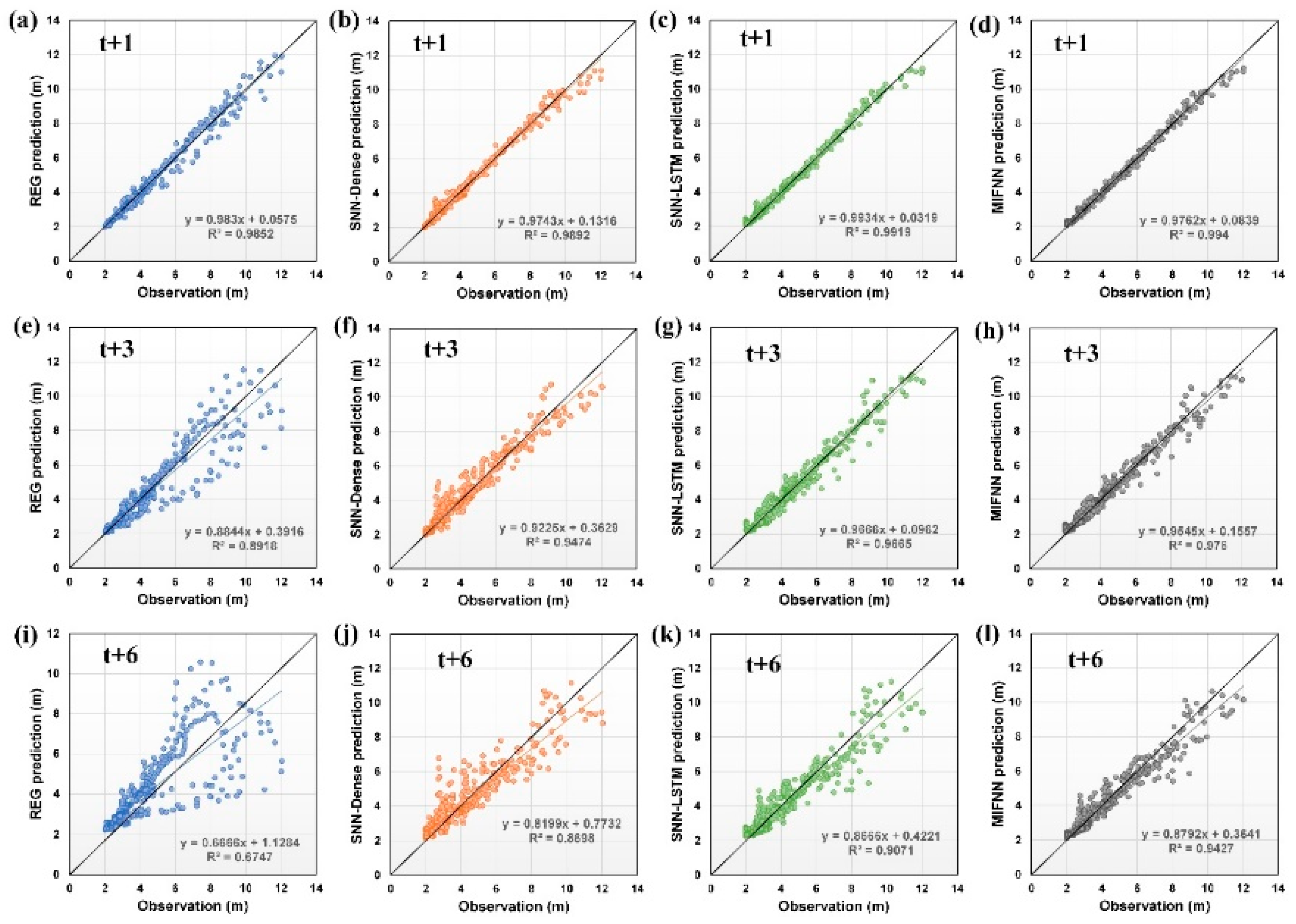
5.2. Evaluation
5.3. Overall, Performance
5.4. Discussion
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Phan, T.T.H.; Nguyen, X.H. Combining statistical machine learning models with ARIMA for water level forecasting: The case of the Red river. Adv. Water Resour. 2020, 142, 103656. [Google Scholar] [CrossRef]
- Yan, J.; Jin, J.; Chen, F.; Yu, G.; Yin, H.; Wang, W. Urban flash flood forecast using support vector machine and numerical simulation. J. Hydroinformatics 2018, 20, 221–231. [Google Scholar] [CrossRef]
- Ou, G.; Chen, X.; Kilic, A.; Bartelt-Hunt, S.; Li, Y.; Samal, A. Development of a cross-section based streamflow routing package for MODFLOW. Environ. Model. Softw. 2013, 50, 132–143. [Google Scholar] [CrossRef]
- Drake, J.; Bradford, A.; Joy, D. Application of HEC-RAS 4.0 temperature model to estimate groundwater contributions to Swan Creek, Ontario, Canada. J. Hydrol. 2010, 389, 390–398. [Google Scholar] [CrossRef]
- Leon, A.S.; Goodell, C. Controlling HEC-RAS using MATLAB. Environ. Model. Softw. 2016, 84, 339–348. [Google Scholar] [CrossRef]
- Lai, C. Numerical modeling of unsteady open-channel flow. Adv. Hydrosci. 1986, 14, 161–333. [Google Scholar]
- Wei, C.C.; Hsu, N.S. Multireservoir flood-control optimization with neural-based linear channel level routing under tidal effects. Water Resour. Manag. 2008, 22, 1625–1647. [Google Scholar] [CrossRef]
- Bazartseren, B.; Hildebrandt, G.; Holz, K.P. Short-term water level prediction using neural networks and neuro-fuzzy approach. Neurocomputing 2003, 55, 439–450. [Google Scholar] [CrossRef]
- Wei, C.C. Wavelet kernel support vector machines forecasting techniques: Case study on water-level predictions during typhoons. Expert Syst. Appl. 2012, 39, 5189–5199. [Google Scholar] [CrossRef]
- Kisi, O.; Cimen, M. A wavelet-support vector machine conjunction model for monthly streamflow forecasting. J. Hydrol. 2011, 399, 132–140. [Google Scholar] [CrossRef]
- Wagena, M.B.; Goering, D.; Collick, A.S.; Bock, E.; Fuka, D.R.; Buda, A.; Easton, Z.M. Comparison of short-term streamflow forecasting using stochastic time series, neural networks, process-based, and Bayesian models. Environ. Model. Softw. 2020, 126, 104669. [Google Scholar] [CrossRef]
- Chang, L.C.; Shen, H.Y.; Chang, F.J. Regional flood inundation nowcast using hybrid SOM and dynamic neural networks. J. Hydrol. 2014, 519, 476–489. [Google Scholar] [CrossRef]
- Wei, C.C. Comparing lazy and eager learning models for water level forecasting in river-reservoir basins of inundation regions. Environ. Model. Softw. 2015, 63, 137–155. [Google Scholar] [CrossRef]
- Xiang, Z.; Demir, I. Distributed long-term hourly streamflow predictions using deep learning: A case study for State of Iowa. Environ. Model. Softw. 2020, 131, 104761. [Google Scholar] [CrossRef]
- Dietterich, T.G. Machine learning for sequential data: A review. In Structural, Syntactic, and Statistical Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2002; pp. 15–30. [Google Scholar]
- Längkvist, M.; Amy Loutfi, L.K. A review of unsupervised feature learning and deep learning for time-series modeling. Pattern Recognit. Lett. 2014, 42, 11–24. [Google Scholar] [CrossRef]
- Bai, Y.; Bezak, N.; Sapač, K.; Klun, M.; Zhang, J. Short-term streamflow forecasting using the feature-enhanced regression model. Water Resour. Manag. 2019, 33, 4783–4797. [Google Scholar] [CrossRef]
- Bi, X.; Li, B.; Lu, W.; Zhou, X. Daily runoff forecasting based on data-augmented neural network model. J. Hydroinform. 2020, 22, 900–915. [Google Scholar] [CrossRef]
- Hrnjica, B.; Bonacci, O. Lake level prediction using feed forward and recurrent neural networks. Water Resour. Manag. 2019, 33, 2471–2484. [Google Scholar] [CrossRef]
- Gires, A.; Onof, C.; Maksimović, Č.; Schertzer, D.; Tchiguirinskaia, I.; Simoes, N. Quantifying the impact of small scale unmeasured rainfall variability on urban runoff through multifractal downscaling: A case study. J. Hydrol. 2012, 442, 117–128. [Google Scholar] [CrossRef]
- Ochoa-Rodriguez, S.; Wang, L.P.; Willems, P.; Onof, C. A review of radar-rain gauge data merging methods and their potential for urban hydrological applications. Water Resour. Res. 2019, 55, 6356–6391. [Google Scholar] [CrossRef]
- Chang, P.L.; Lin, P.F.; Jou, B.J.D.; Zhang, J. An application of reflectivity climatology in constructing radar hybrid scans over complex terrain. J. Atmos. Ocean. Technol. 2009, 26, 1315–1327. [Google Scholar] [CrossRef]
- Seliga, T.A.; Bringi, V.N. Potential use of radar differential reflectivity measurements at orthogonal polarizations for measuring precipitation. J. Appl. Meteorol. Climatol. 1976, 15, 69–76. [Google Scholar] [CrossRef]
- Stout, G.E.; Neill, J.C. Utility of radar in measuring areal rainfall. Bull. Am. Meteorol. Soc. 1953, 34, 21–27. [Google Scholar] [CrossRef][Green Version]
- Ciach, G.J.; Krajewski, W.F.; Anagnostou, E.N.; Baeck, M.L.; Smith, J.A.; McCollum, J.R.; Kruger, A. Radar rainfall estimation for ground validation studies of the Tropical Rainfall Measuring Mission. J. Appl. Meteorol. Climatol. 1997, 36, 735–747. [Google Scholar] [CrossRef]
- Georgakakos, K.P. Covariance propagation and updating in the context of real-time radar data assimilation by quantitative precipitation forecast models. J. Hydrol. 2000, 239, 115–129. [Google Scholar] [CrossRef]
- Kidd, C.; Kniveton, D.R.; Todd, M.C.; Bellerby, T.J. Satellite rainfall estimation using combined passive microwave and infrared algorithms. J. Hydrometeorol. 2003, 4, 1088–1104. [Google Scholar] [CrossRef]
- Lee, J.; Paz, I.; Schertzer, D.; Lee, D.I.; Tchiguirinskaia, I. Multifractal analysis of rainfall-rate datasets obtained by radar and numerical model: The case study of Typhoon Bolaven (2012). J. Appl. Meteorol. Climatol. 2020, 59, 819–840. [Google Scholar] [CrossRef]
- Sauvageot, H. Rainfall measurement by radar: A review. Atmos. Res. 1994, 35, 27–54. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Y.; Ban, J.; Hong, J.S.; Lin, C.Y. Impact of combined assimilation of radar and rainfall data on short-term heavy rainfall prediction: A case study. Mon. Weather Rev. 2020, 148, 2211–2232. [Google Scholar] [CrossRef]
- Wei, C.C. Simulation of operational typhoon rainfall nowcasting using radar reflectivity combined with meteorological data. J. Geophys. Res. Atmos. 2014, 119, 6578–6595. [Google Scholar] [CrossRef]
- Borga, M. Accuracy of radar rainfall estimates for streamflow simulation. J. Hydrol. 2002, 267, 26–39. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Hinton, G.E.; Salakhutdinov, R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Ouyang, W.; Wang, X.; Fieguth, P.; Chen, J.; Liu, X.; Pietikäinen, M. Deep learning for generic object detection: A survey. Int. J. Comput. Vis. 2020, 128, 261–318. [Google Scholar] [CrossRef]
- Wang, J.H.; Lin, G.F.; Chang, M.J.; Huang, I.H.; Chen, Y.R. Real-time water-level forecasting using dilated causal convolutional neural networks. Water Resour. Manag. 2019, 33, 3759–3780. [Google Scholar] [CrossRef]
- Kimura, N.; Yoshinaga, I.; Sekijima, K.; Azechi, I.; Baba, D. Convolutional neural network coupled with a transfer-learning approach for time-series flood predictions. Water 2020, 12, 96. [Google Scholar] [CrossRef]
- Van, S.P.; Le, H.M.; Thanh, D.V.; Dang, T.D.; Loc, H.H.; Anh, D.T. Deep learning convolutional neural network in rainfall-runoff modelling. J. Hydroinformatics 2020, 22, 541–561. [Google Scholar] [CrossRef]
- Kabir, S.; Patidar, S.; Xia, X.; Liang, Q.; Neal, J.; Pender, G. A deep convolutional neural network model for rapid prediction of fluvial flood inundation. J. Hydrol. 2020, 590, 125481. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, Z.; Hong, H.; Peng, L. Flood susceptibility mapping using convolutional neural network frameworks. J. Hydrol. 2020, 582, 124482. [Google Scholar] [CrossRef]
- Water Resources Agency. Available online: https://eng.wra.gov.tw/ (accessed on 1 April 2020).
- Taipei Water Management Office. Available online: https://www.wratb.gov.tw/ (accessed on 1 April 2020).
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- TensorFlow. TensorFlow Core v2.3.0. 2020. Available online: https://www.tensorflow.org/api_docs/python/tf/keras/layers/Dense (accessed on 1 July 2020).
- Park, J.; Edington, D.W. A sequential neural network model for diabetes prediction. Artif. Intell. Med. 2001, 23, 277–293. [Google Scholar] [CrossRef]
- Britz, D. Recurrent Neural Networks Tutorial, Part 1–Introduction to RNNs. 2015. Available online: http://www.wildml.com/2015/09/recurrent-neural-networks-tutorial-part-1-introduction-to-rnns/ (accessed on 1 April 2020).
- Merrill, W. Sequential Neural Networks as Automata. In Proceedings of the Workshop on Deep Learning and Formal Languages, Building Bridges, Florence, Italy, 2 August 2019; pp. 1–13. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Graves, A. Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef] [PubMed]
- Graves, A. Generating sequences with recurrent neural networks. arXiv 2013, arXiv:1308.0850. [Google Scholar]
- Zhang, Q.; Wang, H.; Dong, J.; Zhong, G.; Sun, X. Prediction of sea surface temperature using long short-term memory. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1745–1749. [Google Scholar] [CrossRef]
- Wei, C.C.; Hsieh, P.Y. Estimation of hourly rainfall during typhoons using radar mosaic-based convolutional neural networks. Remote Sens. 2020, 12, 896. [Google Scholar] [CrossRef]
- Sainath, T.N.; Kingsbury, B.; Saon, G.; Soltau, H.; Mohamed, A.; Dahl, G.; Ramabhadran, B. Deep convolutional neural networks for large-scale speech tasks. Neural Netw. 2015, 64, 39–48. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y. Convolutional Networks for Images, Speech, and Time-series. In The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Chollet, F. Keras: Deep Learning Library for Theano and Tensorflow. 2015. Available online: https://keras.io/ (accessed on 1 February 2020).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Celisse, A. Optimal cross-validation in density estimation with the L2-loss1. Ann. Stat. 2014, 42, 1879–1910. [Google Scholar] [CrossRef]
- Wei, C.C.; Hsu, N.S. Optimal tree-based release rules for real-time flood control operations on a multipurpose multireservoir system. J. Hydrol. 2009, 365, 213–224. [Google Scholar] [CrossRef]
- Taipei City Government. Guidelines of Feitsui Reservoir Operations; Taipei City Government: Taipei, Taiwan, 2004. (In Chinese)
- Yeh, W.W.G. Reservoir management and operation models: A state-of-the-art review. Water Resour. Res. 1985, 21, 1797–1818. [Google Scholar] [CrossRef]
- Labadie, J.W. Optimal operation of multireservoir systems: State-of-the-art review. J. Water Resour. Plan. Manag. 2004, 130, 93–111. [Google Scholar] [CrossRef]
- Rani, D.; Moreira, M.M. Simulation-optimization modeling: A survey and potential application in reservoir systems operation. Water Resour. Manag. 2010, 24, 1107–1138. [Google Scholar] [CrossRef]
- Hsu, N.S.; Wei, C.C. A multipurpose reservoir real-time operation model for flood control during typhoon invasion. J. Hydrol. 2007, 336, 282–293. [Google Scholar] [CrossRef]
- Wei, C.C. Discretized and continuous target fields for the reservoir release rules during floods. Water Resour. Manag. 2012, 26, 3457–3477. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J.L. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 5–8 May 2015; pp. 1–13. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2017, arXiv:1609.04747. [Google Scholar]
- Monner, D.; Reggia, J.A. A generalized LSTM-like training algorithm for second-order recurrent. Neural Netw. 2012, 25, 70–83. [Google Scholar] [CrossRef]
- Wei, C.C. Development of stacked long short-term memory neural networks with numerical solutions for wind velocity predictions. Adv. Meteorol. 2020, 2020, 5462040. [Google Scholar] [CrossRef]
- Maier, H.R.; Jain, A.; Dandy, G.C.; Sudheer, K.P. Methods used for the development of neural networks for the prediction of water resource variables in river systems: Current status and future directions. Environ. Model. Softw. 2010, 25, 891–909. [Google Scholar] [CrossRef]
- Gilewski, P.; Nawalany, M. Inter-comparison of rain-gauge, radar, and satellite (IMERG GPM) precipitation estimates performance for rainfall-runoff modeling in a mountainous catchment in Poland. Water 2018, 10, 1665. [Google Scholar] [CrossRef]
- McKee, J.L.; Binns, A.D. A review of gauge–radar merging methods for quantitative precipitation estimation in hydrology. Can. Water Resour. J. 2016, 41, 186–203. [Google Scholar] [CrossRef]
- Ivashkin, V.; Lebedev, V. Spatiotemporal data fusion for precipitation nowcasting. arXiv 2018, arXiv:1812.10915. [Google Scholar]
- Chang, C.H.; Chung, M.K.; Yang, S.Y.; Hsu, C.T.; Wu, S.J. A case study for the application of an operational two-dimensional real-time flooding forecasting system and smart water level gauges on roads in Tainan City, Taiwan. Water 2018, 10, 574. [Google Scholar] [CrossRef]
- Kimura, N.; Chiang, S.; Wei, H.-P.; Su, Y.-F.; Chu, J.; Cheng, C.-T.; Liou, J.-J.; Chen, Y.-M.; Lin, L.-Y. Tsengwen Reservoir Watershed hydrological flood simulation under global climate change using the 20 km mesh Meteorological Research Institute Atmospheric General Circulation Model (MRI-AGCM). Terr. Atmos. Ocean. Sci. 2014, 25, 449–461. [Google Scholar] [CrossRef]
- Wei, C.C. Comparing single- and two-segment statistical models with a conceptual rainfall-runoff model for river streamflow prediction during typhoons. Environ. Model. Softw. 2016, 85, 112–128. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water-Level Station | River Bed Elevation (m) | Design Defense Flood Level (m) | Embankment Top Elevation (m) |
|---|---|---|---|
| Hsiu-Lung | 0.00 | 13.03 | 15.04 |
| Chu-Chih | 40.50 | 57.80 | 54.30 |
| Shang-Gui-Shan Bridge | 55.24 | 66.69 | 68.88 |
| Lan-Sheng Bridge | 107.50 | 119.95 | 121.45 |
| Date | Typhoon | Max Water Level at Hsiu-Lung Station (m) | Da-Tong-Shan Station | Fu-Shan Station | Total Release from Feitsui Reservoir (106m3) | ||
|---|---|---|---|---|---|---|---|
| Max Rain Rate (mm/h) | Total Precipitation (mm) | Max Rain Rate (mm/h) | Total Precipitation (mm) | ||||
| 26–31 August 2011 | Namadol | 4.5 | 14 | 187 | 51 | 269 | 9.9 |
| 29 July–8 August 2012 | Saola | 11.4 | 50 | 666 | 84 | 878 | 135.3 |
| 11–16 July 2013 | Soulik | 8.1 | 36 | 210 | 10 | 41 | 57.3 |
| 19–23 August 2013 | Trami | 6.9 | 59 | 543 | 35 | 471 | 19.0 |
| 31 August–6 September 2013 | Kong-Rey | 4.8 | 55 | 319 | 11 | 83 | 43.2 |
| 21–27 July 2014 | Matmo | 5.9 | 13 | 127 | 29 | 272 | 44.4 |
| 21–29 September 2014 | Fung-Wong | 4.2 | 59 | 336 | 70 | 310 | 13.3 |
| 7–11 August 2015 | Soudelor | 12.0 | 69 | 538 | 82 | 731 | 59.1 |
| 25 September–6 October 2015 | Dujuan | 9.8 | 48 | 443 | 76 | 725 | 138.0 |
| 13–15 September 2016 | Meranti | 3.9 | 12 | 70 | 17 | 130 | 11.4 |
| 16–21 September 2016 | Malakas | 5.0 | 18 | 243 | 28 | 279 | 40.9 |
| 26–30 September 2016 | Megi | 9.2 | 41 | 456 | 68 | 513 | 104.5 |
| 28 July–1 August 2017 | Nesat | 3.4 | 18 | 110 | 26 | 155 | 11.3 |
| 6–12 August 2019 | Lekima | 4.8 | 21 | 210 | 29 | 331 | 21.8 |
| 22–26 August 2019 | Bailu | 3.3 | 9 | 38 | 14 | 225 | 19.9 |
| 26 September–4 October 2019 | Mitag | 7.6 | 33 | 408 | 25 | 467 | 91.2 |
| Attribute | Name | Unit | Mean | Range | Standard Deviation |
|---|---|---|---|---|---|
| Water level | Hsiu-Lung | m | 3.07 | 1.86–12.04 | 1.25 |
| Chu-Chih | m | 49.23 | 47.23–52.57 | 0.59 | |
| Shang-Gui-Shan Bridge | m | 57.52 | 55.32–68.00 | 1.37 | |
| Lan-Sheng Bridge | m | 110.23 | 107.83–120.30 | 1.42 | |
| Rain | Da-Tong-Shan | mm/h | 1.90 | 0–69 | 6.01 |
| Fu-Shan | mm/h | 2.28 | 0–84 | 7.45 | |
| Reservoir release | Feitsui | m3/s | 89.05 | 12.15–733.59 | 106.18 |
| Measure | REG | SNN-Dense | SNN-LSTM | MIFNN |
|---|---|---|---|---|
| MAE (m) | 0.286 | 0.289 | 0.256 | 0.208 |
| rMAE | 0.077 | 0.078 | 0.069 | 0.056 |
| RMSE (m) | 0.653 | 0.480 | 0.383 | 0.317 |
| rRMSE | 0.176 | 0.130 | 0.103 | 0.086 |
| CE | 0.855 | 0.919 | 0.949 | 0.965 |
| R | 0.924 | 0.966 | 0.977 | 0.984 |
| EWp (%) | 7.822 | 10.979 | 7.686 | 6.150 |
| TWp (h) | 3.333 | 1.792 | 1.417 | 1.167 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, C.-C. Comparison of River Basin Water Level Forecasting Methods: Sequential Neural Networks and Multiple-Input Functional Neural Networks. Remote Sens. 2020, 12, 4172. https://doi.org/10.3390/rs12244172
Wei C-C. Comparison of River Basin Water Level Forecasting Methods: Sequential Neural Networks and Multiple-Input Functional Neural Networks. Remote Sensing. 2020; 12(24):4172. https://doi.org/10.3390/rs12244172
Chicago/Turabian StyleWei, Chih-Chiang. 2020. "Comparison of River Basin Water Level Forecasting Methods: Sequential Neural Networks and Multiple-Input Functional Neural Networks" Remote Sensing 12, no. 24: 4172. https://doi.org/10.3390/rs12244172
APA StyleWei, C.-C. (2020). Comparison of River Basin Water Level Forecasting Methods: Sequential Neural Networks and Multiple-Input Functional Neural Networks. Remote Sensing, 12(24), 4172. https://doi.org/10.3390/rs12244172