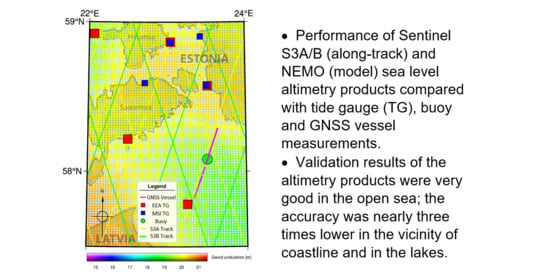
Validation of Copernicus Sea Level Altimetry Products in the Baltic Sea and Estonian Lakes

 , , , and
, , , and 
Abstract
1. Introduction
2. Material and Methods
2.1. Validation Scheme
2.2. Study Sites
2.3. Geoid Model EST-GEOID2017
2.4. Sentinel-3 Data Products
2.5. In Situ Data
2.6. Copernicus Marine Environment Monitoring Service (CMEMS) Data Products
3. Results
3.1. Sentinel-3 Level-2 Product Validation with GNSS Campaigns
3.2. Sentinel-3 Level-2 Product Validation with the Geoid-Based Sea Surface Height
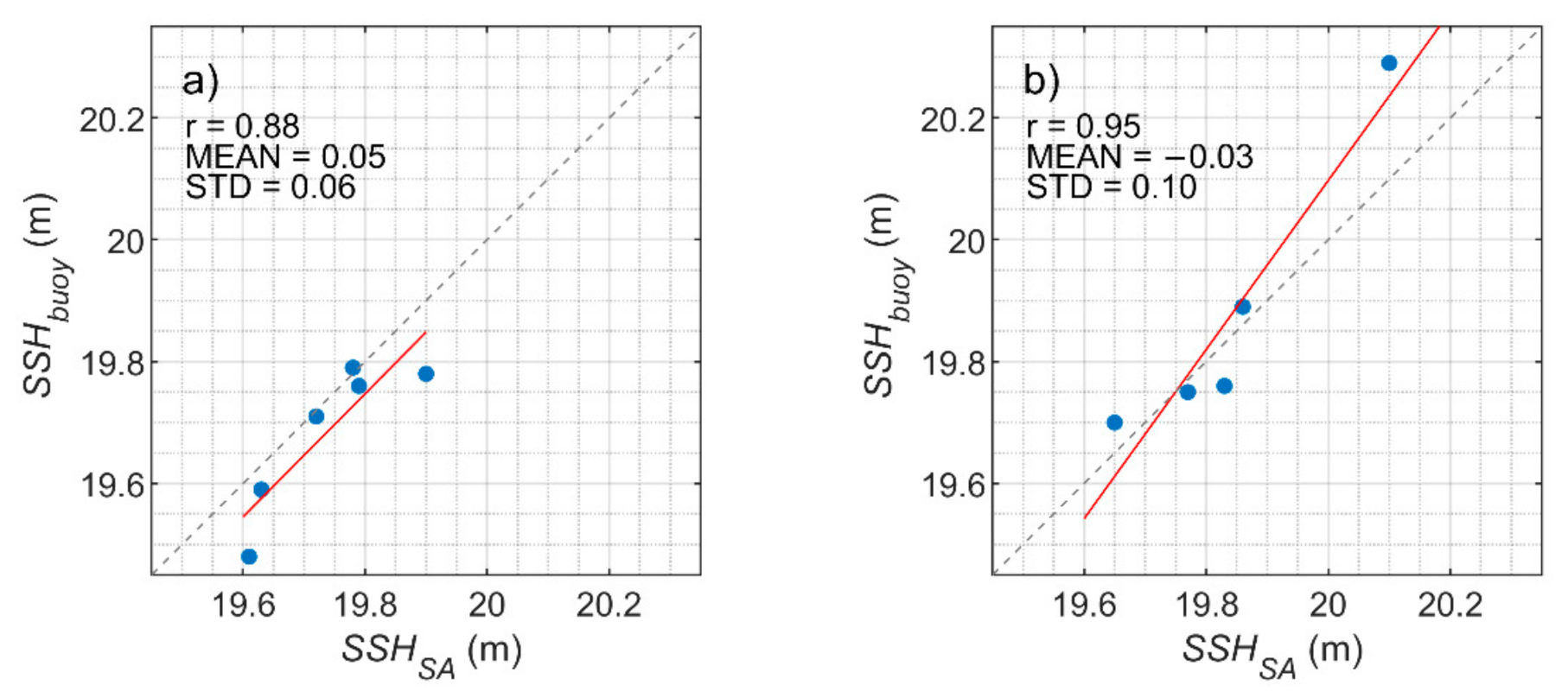
3.3. Sentinel-3 Level-2 Product Validation with Buoy Data in the Gulf of Riga
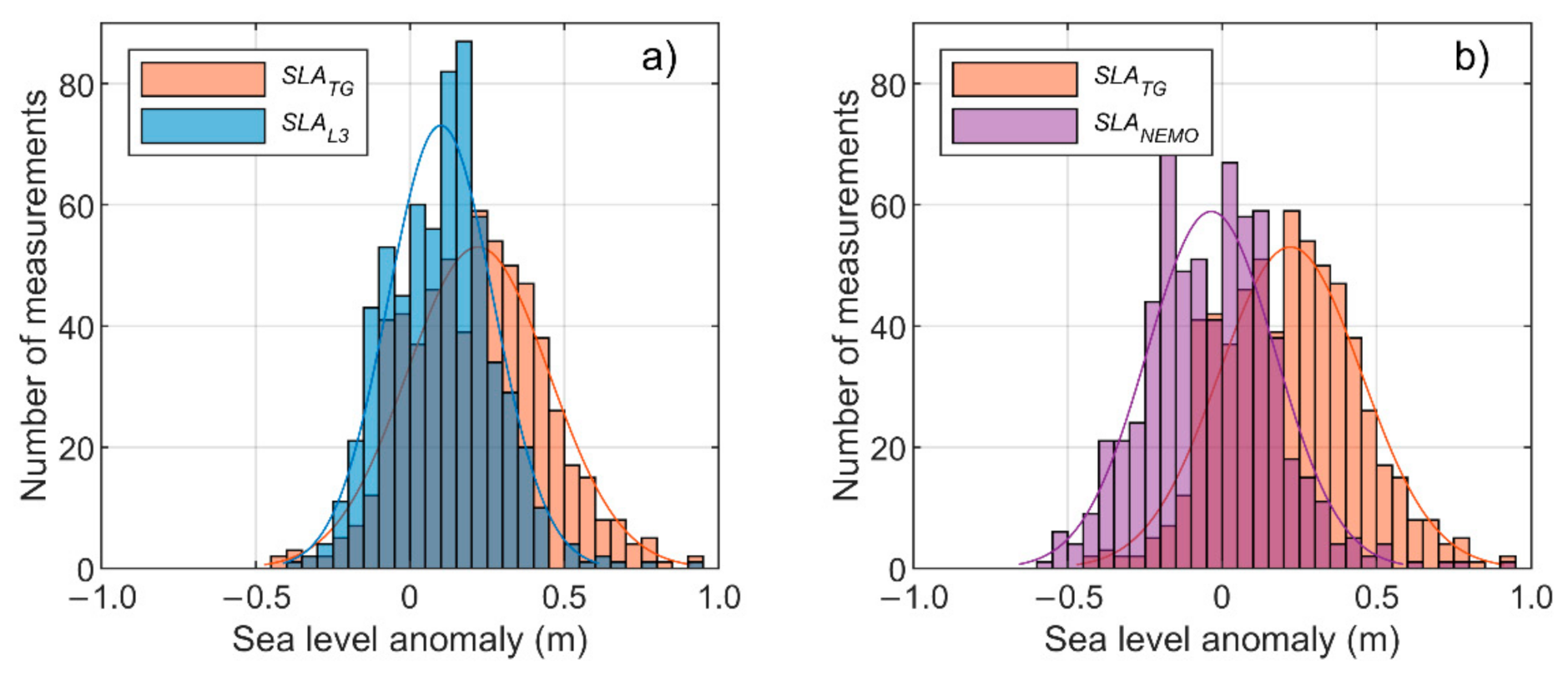
3.4. SLAL3 and SLANEMO Comparison with In Situ SLATG Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shum, C.K.; Ries, J.C.; Tapley, B.D. The accuracy and applications of satellite altimetry. Geophys. J. Int. 1995, 121, 321–336. [Google Scholar] [CrossRef]
- Míguez, B.M.; Testut, L.; Wöppelmann, G. Performance of modern tide gauges: Towards mm-level accuracy. Sci. Mar. 2012, 76, 221–228. [Google Scholar] [CrossRef]
- Ollivier, A.; Faugere, Y.; Picot, N.; Ablain, M.; Femenias, P.; Benveniste, J. Envisat Ocean altimeter becoming relevant for mean sea level trend studies. Mar. Geod. 2012, 35, 118–136. [Google Scholar] [CrossRef]
- Prandi, P.; Philipps, S.; Pignot, V.; Picot, N. SARAL/AltiKa global statistical assessment and cross-calibration with Jason-2. Mar. Geod. 2015, 38, 297–312. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Vignudelli, S.; Birol, F.; Benveniste, J.; Fu, L.-L.; Picot, N.; Raynal, M.; Roinard, H. Satellite Altimetry Measurements of Sea Level in the Coastal Zone. Surv. Geophys. 2019, 40, 1319–1349. [Google Scholar] [CrossRef]
- Wingham, D.J.; Francis, C.R.; Baker, S.; Bouzinac, C.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.W.; Mallow, U.; Mavrocordatos, C.; Phalippou, L.; et al. CryoSat: A mission to determine the fluctuations in earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Santos-Ferreira, A.M.; Silva, J.C.B.; Magalhães, J.M. SAR Mode Altimetry Observations of Internal Solitary Waves in the Tropical Ocean Part 1: Case Studies. Remote Sens. 2018, 10, 644. [Google Scholar] [CrossRef]
- Shu, S.; Liu, H.; Beck, R.A.; Frappart, F.; Korhonen, J.; Xu, M.; Yang, B.; Hinkel, K.M.; Huang, Y.; Yu, B. Analysis of Sentinel-3 SAR altimetry waveform retracking algorithms for deriving temporally consistent water levels over ice-covered lakes. Remote Sens. Environ. 2020, 239, 111643. [Google Scholar] [CrossRef]
- Birgiel, E.; Ellmann, A.; Delpeche-Ellmann, N. Examining the Performance of the Sentinel-3 Coastal Altimetry in the Baltic Sea Using a Regional High-Resolution Geoid Model. In Proceedings of the 2018 Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Poland, 21–23 June 2018; pp. 196–201. [Google Scholar] [CrossRef]
- Birkett, C.; Reynolds, C.; Beckley, B.D. From research to operations: The USDA global reservoir and lake monitor. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 19–50. [Google Scholar]
- Ruiz Etcheverry, L.A.; Saraceno, M.; Piola, A.R.; Valladeau, G.; Möller, O.O. A comparison of the annual cycle of sea level in coastal areas from gridded satellite altimetry and tide gauges. Cont. Shelf Res. 2015, 92, 87–97. [Google Scholar] [CrossRef]
- Ardalan, A.A.; Jazireeyan, I.; Abdi, N.; Rezvani, M.H. Evaluation of SARAL/AltiKa performance using GNSS/IMU equipped buoy in Sajafi, Imam Hassan and Kangan Ports. Adv. Space Res. 2018, 61, 1537–1545. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Ménard, Y.; Orsoni, A.; Jeansou, E.; Haines, B.J.; Kubitschek, D.G.; Born, G. Leveling the Sea Surface Using a GPS-Catamaran Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 319–334. [Google Scholar] [CrossRef]
- Liibusk, A.; Ellmann, A.; Kõuts, T.; Jürgenson, H. Precise hydrodynamic levelling by using pressure gauges. Mar. Geod. 2013, 36, 138–163. [Google Scholar] [CrossRef]
- Varbla, S.; Ellmann, A.; Delpeche-Ellmann, N. Validation of marine geoid models by utilizing hydrodynamic model and shipborne GNSS profiles. Mar. Geod. 2020, 43, 134–162. [Google Scholar] [CrossRef]
- Medvedev, I.P.; Rabinovich, A.B.; Kulikov, E.A. Tidal Oscillations in the Baltic Sea. Oceanology 2013, 53, 526–538. [Google Scholar] [CrossRef]
- Mayer-Guerr, T. The combined satellite gravity field model GOCO05s. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 12–17 April 2015; Volume 17, p. EGU2015-12364. Available online: https://meetingorganizer.copernicus.org/EGU2015/EGU2015-12364.pdf (accessed on 15 August 2020).
- Ellmann, A.; Märdla, S.; Oja, T. The 5 mm geoid model for Estonia computed by the least squares modified Stokes’s formula. Surv. Rev. 2020, 52, 352–371. [Google Scholar] [CrossRef]
- Cipollini, P.; Francisco, M.C.; Jevrejeva, S.; Melet, A.; Prandi, P. Monitoring Sea Level in the Coastal Zone with Satellite Altimetry and Tide Gauges. Surv. Geophys. 2017, 38, 33–57. [Google Scholar] [CrossRef]
- ESA. Sentinel-3 Core PDGS Instrument Processing Facility (IPF) Implementation Product Data Format Specification—SRAL/MWR Level 1 & 2 Instrument Products. 2017. Available online: https://earth.esa.int/documents/247904/1848151/Sentinel-3_Product_Format_Specification_SRAL-MWR_L1-2 (accessed on 18 September 2020).
- Wingham, D.J.; Rapley, C.G.; Griffiths, H. New techniques in satellite altimeter tracking systems. In Proceedings of the IGARSS’86 Symposium, Zurich, Switzerland, 8–11 September 1986; Volume ESA SP-254, pp. 1339–1344. [Google Scholar]
- Chander, S.; Ganguly, D.; Dubey, A.K.; Gupta, P.K.; Singh, R.P.; Chauhan, P. Inland water bodies monitoring using satellite altimetry over Indian region. Int. Arch. Photogramm. Remote Sens Spat. Inf. Sci. 2014. [Google Scholar] [CrossRef]
- Kollo, K.; Ellmann, A. Geodetic Reconciliation of Tide Gauge Network in Estonia. Geophysica 2019, 54, 27–38. [Google Scholar]
- Nordman, M.; Kuokkanen, J.; Bilker-Koivula, M.; Koivula, H.; Hakli, P.; Lahtinen, S. Geoid Validation on the Baltic Sea Using Ship-borne GNSS Data. Mar. Geod. 2018, 41, 457–476. [Google Scholar] [CrossRef]
- Varbla, S.; Ellmann, A.; Märdla, S.; Gruno, A. Assessment of marine geoid models by ship-borne GNSS profiles. Geod. Cartogr. 2017, 43, 41–49. [Google Scholar] [CrossRef]
- Estey, L.H.; Meertens, C.M. TEQC: The multi-purpose toolkit for GPS/GLONASS data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Kall, T.; Oja, T.; Kollo, K.; Liibusk, A. The Noise Properties and Velocities from a Time-Series of Estonian Permanent GNSS Stations. Geosciences 2019, 9, 233. [Google Scholar] [CrossRef]
- Pujol, M.-I.; Mertz, F. Product User Manual, Tech. rep., Copernicus Marine Environment Monitoring Service. 2020. Available online: https://resources.marine.copernicus.eu/documents/PUM/CMEMS-SL-PUM-008-032-062.pdf (accessed on 5 May 2020).
- Axell, L.; Huess, V. Product User Manual, Tech. rep., Copernicus Marine Environment Monitoring Service. 2020. Available online: https://resources.marine.copernicus.eu/documents/PUM/CMEMS-BAL-PUM-003-011.pdf (accessed on 5 May 2020).
- Taburet, G.; Pujol, M.-I.; SL-TAC Team. Quality Information Document, Tech. rep., Copernicus Marine Environment Monitoring Service. 2020. Available online: https://resources.marine.copernicus.eu/documents/QUID/CMEMS-SL-QUID-008-032-062.pdf (accessed on 5 May 2020).
- Liu, Y.; Axell, L.; Jandt, S.; Lorkowski, I.; Lindenthal, A.; Verjovkina, S.; Schwichtenberg, F. Quality Information Document, Tech. rep., Copernicus Marine Environment Monitoring Service. 2019. Available online: https://resources.marine.copernicus.eu/documents/QUID/CMEMS-BAL-QUID-003-011.pdf (accessed on 5 May 2020).
- Jiang, L.; Schneider, R.; Andersen, O.B.; Bauer-Gottwein, P. CryoSat-2 Altimetry Applications over Rivers and Lakes. Water 2017, 9, 211. [Google Scholar] [CrossRef]
- Madsen, K.S.; Høyer, J.L.; Suursaar, Ü.; She, J.; Knudsen, P. Sea level trends and variability of the Baltic Sea from 2D statistical reconstruction and altimetry. Front. Earth Sci. 2019, 7, 1–12. [Google Scholar] [CrossRef]
- Suursaar, Ü.; Kall, T. Decomposition of Relative Sea Level Variations at Tide Gauges Using Results from Four Estonian Precise Levelings and Uplift Models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1966–1974. [Google Scholar] [CrossRef]
- Xu, Q.; Cheng, Y.; Plag, H.-P.; Zhang, B. Investigation of sea level variability in the Baltic Sea from tide gauge, satellite altimeter data, and model reanalysis. Int. J. Remote Sens. 2014, 36, 2548–2568. [Google Scholar] [CrossRef]
- Li, P.; Li, H.; Chen, F.; Cai, X. Monitoring Long-Term Lake Level Variations in Middle and Lower Yangtze Basin over 2002–2017 through Integration of Multiple Satellite Altimetry Datasets. Remote Sens. 2020, 12, 1448. [Google Scholar] [CrossRef]
- Cretaux, J.F.; Berge-Nguyen, M.; Calmant, S.; Jamangulova, N.; Satylkanov, R.; Lyard, F.; Perosanz, F.; Verron, J.; Samine Montazem, A.; Le Guilcher, G.; et al. Absolute calibration or validation of the altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. [Google Scholar] [CrossRef]
- Li, X.; Long, D.; Huang, Q.; Han, P.; Zhao, F.; Wada, Y. High-temporal-resolution water level and storage change data sets for lakes on the Tibetan Plateau during 2000–2017 using multiple altimetric missions and Landsat-derived lake shoreline positions. Earth Syst. Sci. Data Discuss. 2019, 11, 1603–1627. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument/ Model | Estimated Uncertainty | Error Source |
|---|---|---|
| GNSS on the vessel | ±0.02 | Method of measurements Method of data processing Type of antenna and receiver Antenna connection to the water |
| Pressure sensor-based tide gauge | ±0.01–0.02 | Time-dependent drift Accuracy of the sensor Connection to the height reference Stability of the height reference (vertical land motion) |
| Pressure sensor-based buoy | ±0.01–0.02 | Time-dependent drift Accuracy of the sensor Connection to the height reference |
| EST-GEOID2017 | ±0.005–0.03 | Accuracy and density of the gravity data Accuracy and density of the GNSS/levelling fitting points Calculation method and accuracy of the modelling |
| Waterbody | Gulf of Finland | Gulf of Riga | Lake Peipus | Lake Võrtsjärv |
|---|---|---|---|---|
| Date | 25 April 2019 | 20 June 2019 | 19 June 2019 | 13 July 2019 |
| Weather conditions | Light wind, waves up to 1 m | Calm, no waves | Calm, no waves | Calm, no waves |
| Profile length (km) | 25 | 54 | 33 | 10 |
| Vessel |  |  |  |  |
| Mission | Instrument | Ground Track Repeat Cycle (Days) | Time Interval | Measurements |
|---|---|---|---|---|
| SARAL | AltiKa | 35 | 13 January 2014–31 December 2017 | 167 |
| CryoSat-2 | SIRAL-2 | 369 | 5 January 2014–31 December 2017 | 225 |
| HY-2A | ALT | 14 | 24 April 2014–31 December 2017 | 111 |
| Jason-2 | Poseidon-3 | 10 | 9 January 2014–31 December 2017 | 50 |
| Jason-3 | Poseidon-3B | 10 | 30 May 2016–31 December 2017 | 24 |
| Sentinel-3A | SRAL | 27 | 1 July 2016–31 December 2017 | 48 |
| Statistics | Gulf of Finland | Gulf of Riga | Lake Peipus | Lake Võrtsjärv |
|---|---|---|---|---|
| MEAN (m) | 0.11 | 0.14 | 0.16 | 0.31 |
| STD (m) | 0.08 | 0.05 | 0.13 | 0.39 |
| RMSE (m) | 0.13 | 0.15 | 0.21 | 0.49 |
| MIN (m) | −0.11 | 0.00 | −0.33 | −0.45 |
| MAX (m) | 0.29 | 0.27 | 0.38 | 0.74 |
| Common measurements | 80 | 180 | 110 | 30 |
| Statistics | Gulf of Finland | Gulf of Riga | Lake Peipus | Lake Võrtsjärv |
|---|---|---|---|---|
| MEAN (m) | 0.01 | 0.00 | 0.14 | 0.13 |
| STD (m) | 0.06 | 0.07 | 0.16 | 0.27 |
| RMSE (m) | 0.07 | 0.10 | 0.23 | 0.27 |
| MIN (m) | −0.32 | −0.98 | −0.56 | −1.13 |
| MAX (m) | 0.33 | 0.58 | 0.98 | 0.78 |
| Common measurements * | 75 | 190 ** 445 *** | 100 | 30 |
| Station No | Station Name | Common Measurements | SLATG vs. SLAL3 | SLATG vs. SLANEMO | ||
|---|---|---|---|---|---|---|
| r | RMSE (m) | r | RMSE (m) | |||
| 1 | Dirhami | 116 | 0.83 | 0.17 | 0.93 | 0.26 |
| 2 | Kunda | 22 | 0.88 | 0.22 | 0.92 | 0.29 |
| 3 | Narva-Jõesuu | 32 | 0.71 | 0.35 | 0.97 | 0.29 |
| 4 | Loksa | 7 | 0.82 | 0.14 | 0.83 | 0.21 |
| 5 | Pirita | 5 | 0.90 | 0.09 | 0.94 | 0.21 |
| 6 | Paldiski | 5 | 0.79 | 0.17 | 0.87 | 0.26 |
| 7 | Ristna | 73 | 0.86 | 0.17 | 0.92 | 0.30 |
| 8 | Heltermaa | 20 | 0.88 | 0.09 | 0.83 | 0.27 |
| 9 | Virtsu | 19 | 0.81 | 0.15 | 0.90 | 0.26 |
| 10 | Roomassaare | 18 | 0.73 | 0.18 | 0.89 | 0.27 |
| 11 | Ruhnu | 82 | 0.86 | 0.20 | 0.92 | 0.31 |
| 12 | Häädemeeste | 41 | 0.76 | 0.19 | 0.88 | 0.30 |
| 13 | Pärnu | 8 | 0.86 | 0.17 | 0.97 | 0.27 |
| 14 | Muuga | 15 | 0.80 | 0.17 | 0.83 | 0.27 |
| 15 | Tallinna Sadam (MSI) | 4 | 0.97 | 0.08 | 0.95 | 0.24 |
| 16 | Paldiski (MSI) | 15 | 0.83 | 0.23 | 0.88 | 0.31 |
| 17 | Lehtma | 82 | 0.85 | 0.14 | 0.93 | 0.21 |
| 18 | Heltermaa (MSI) | 21 | 0.85 | 0.10 | 0.87 | 0.24 |
| 19 | Triigi | 5 | 0.77 | 0.09 | 0.91 | 0.22 |
| 20 | Virtsu | 17 | 0.82 | 0.23 | 0.91 | 0.33 |
| 21 | Rohuküla (MSI) | 18 | 0.94 | 0.17 | 0.96 | 0.25 |
| Total/weighted average | 625 | 0.83 | 0.18 | 0.91 | 0.27 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liibusk, A.; Kall, T.; Rikka, S.; Uiboupin, R.; Suursaar, Ü.; Tseng, K.-H. Validation of Copernicus Sea Level Altimetry Products in the Baltic Sea and Estonian Lakes. Remote Sens. 2020, 12, 4062. https://doi.org/10.3390/rs12244062
Liibusk A, Kall T, Rikka S, Uiboupin R, Suursaar Ü, Tseng K-H. Validation of Copernicus Sea Level Altimetry Products in the Baltic Sea and Estonian Lakes. Remote Sensing. 2020; 12(24):4062. https://doi.org/10.3390/rs12244062
Chicago/Turabian StyleLiibusk, Aive, Tarmo Kall, Sander Rikka, Rivo Uiboupin, Ülo Suursaar, and Kuo-Hsin Tseng. 2020. "Validation of Copernicus Sea Level Altimetry Products in the Baltic Sea and Estonian Lakes" Remote Sensing 12, no. 24: 4062. https://doi.org/10.3390/rs12244062
APA StyleLiibusk, A., Kall, T., Rikka, S., Uiboupin, R., Suursaar, Ü., & Tseng, K.-H. (2020). Validation of Copernicus Sea Level Altimetry Products in the Baltic Sea and Estonian Lakes. Remote Sensing, 12(24), 4062. https://doi.org/10.3390/rs12244062